
Laser Deflection System: Disturbance Correction Final Presentation Team 5 April 23, 2003 By: Tyler...
21
Laser Deflection System: Laser Deflection System: Disturbance Correction Disturbance Correction Final Presentation Final Presentation Team 5 Team 5 April 23, 2003 April 23, 2003 By: Tyler By: Tyler Ferman Ferman Matt DiLeo Matt DiLeo Jack Damerji Jack Damerji
-
Upload
trevor-fox -
Category
Documents
-
view
219 -
download
1
Transcript of Laser Deflection System: Disturbance Correction Final Presentation Team 5 April 23, 2003 By: Tyler...

Laser Deflection System:Laser Deflection System:Disturbance CorrectionDisturbance Correction
Final Presentation Final Presentation
Team 5Team 5
April 23, 2003April 23, 2003
By: Tyler FermanBy: Tyler FermanMatt DiLeoMatt DiLeoJack DamerjiJack Damerji
Laser Laser Disturbance Disturbance CorrectionCorrection
Goals: Goals: movie - movingpantilt.mpegmovie - movingpantilt.mpeg
Correct for a measurable input disturbance.Correct for a measurable input disturbance. Redirect laser to target according to Redirect laser to target according to
measured disturbance of input trajectory.measured disturbance of input trajectory.
ObjectivesObjectives Develop accurate controller in order to keep Develop accurate controller in order to keep
a laser communication link.a laser communication link. Develop system to measure input trajectory Develop system to measure input trajectory
disturbance.disturbance.

Original SpecificationsOriginal Specifications Input: Laser PenInput: Laser Pen
Range of motion: 53Range of motion: 53o o
Location: 5’’ x 6’’ x 0”Location: 5’’ x 6’’ x 0” Assume user input of 0.1 sec to travel across Assume user input of 0.1 sec to travel across
mirrormirror Controller:Controller:
5” mirror mounted on center of each axis5” mirror mounted on center of each axis Range of motion: 35Range of motion: 35o o
Settling time: ~0.1s Settling time: ~0.1s Overshoot: < 1% Overshoot: < 1%
Output: Point on screenOutput: Point on screen 36” away36” away
Original design ConstraintsOriginal design Constraints
First pan-tilt modified to hold a laser pen.First pan-tilt modified to hold a laser pen. cheap and accuratecheap and accurate Narrows input to 2 DOFNarrows input to 2 DOF
Second pan-tilt modified to carry a Second pan-tilt modified to carry a mirror.mirror.
ChallengesChallenges Accurately calculating input Accurately calculating input PositioningPositioning Calculation of desired mirror anglesCalculation of desired mirror angles Developing fast and accurate controllerDeveloping fast and accurate controller
Project construction and Project construction and functional testsfunctional tests
Construction: Construction: movie - showcase.mpegmovie - showcase.mpeg
Input Pan-TiltInput Pan-Tilt Controller Pan-TiltController Pan-Tilt Mounting both system on one plate Mounting both system on one plate
Friction measurementsFriction measurements Tilt:Tilt:
Average Viscous Friction: .002Average Viscous Friction: .002Coulomb Friction = 0.18Coulomb Friction = 0.18
Pan:Pan:Average Viscous Friction: .0005Average Viscous Friction: .0005Coulomb Friction = 0.08Coulomb Friction = 0.08

Controller DesignController Design
Linearizing SystemLinearizing System Finding a PID compensatorFinding a PID compensator Simulating the compensator on Simulating the compensator on
nonlinear systemnonlinear system

Controller DesignController Design
PanPan
TiltTilt

Step Response Pan SideStep Response Pan Side
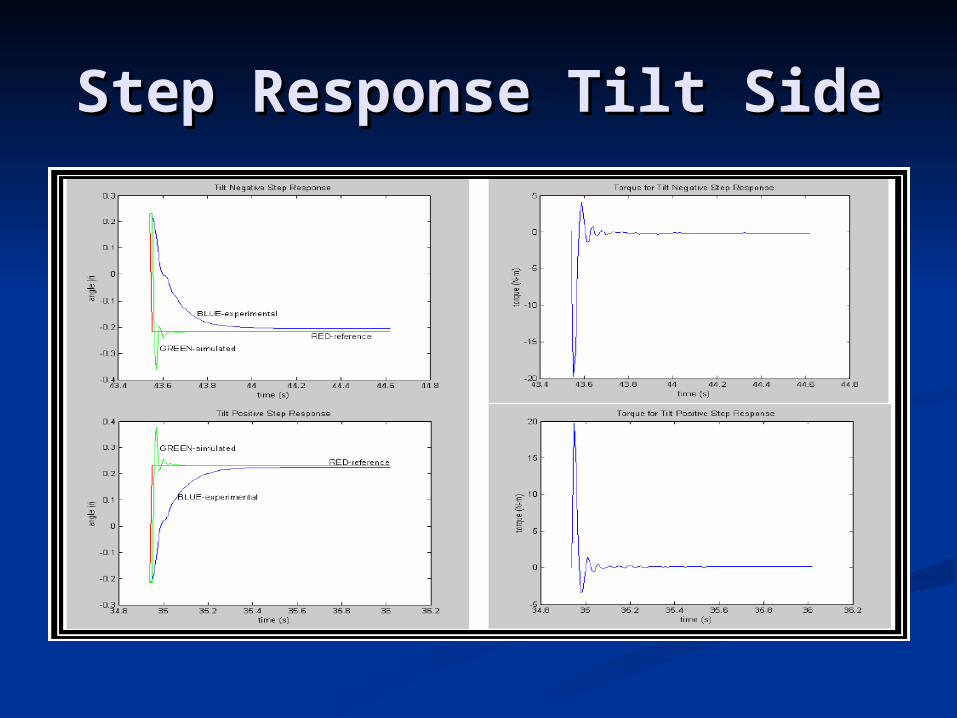
Step Response Tilt SideStep Response Tilt Side

Actual Performance Results 1
Hit rate: 100%Avg pan err: 0.0029Avg tilt err: 0.0029
movie - target.mpegmovie - target.mpeg

Actual Performance Results 2
Hit rate: 99.6%Avg pan err: 0.0045Avg tilt err: 0.49

Actual Performance Results 3
Hit rate: 85.3%Avg pan err: 0.0044Avg tilt err: 0.0057

Actual Performance Results 4
Hit rate: 65.8%Avg pan err: 0.0091Avg tilt err: 0.0052
movie - crazyfreq.mpegmovie - crazyfreq.mpeg

Sinusoidal Response Pan Sinusoidal Response Pan side side

Sinusoidal Response Tilt Sinusoidal Response Tilt side side
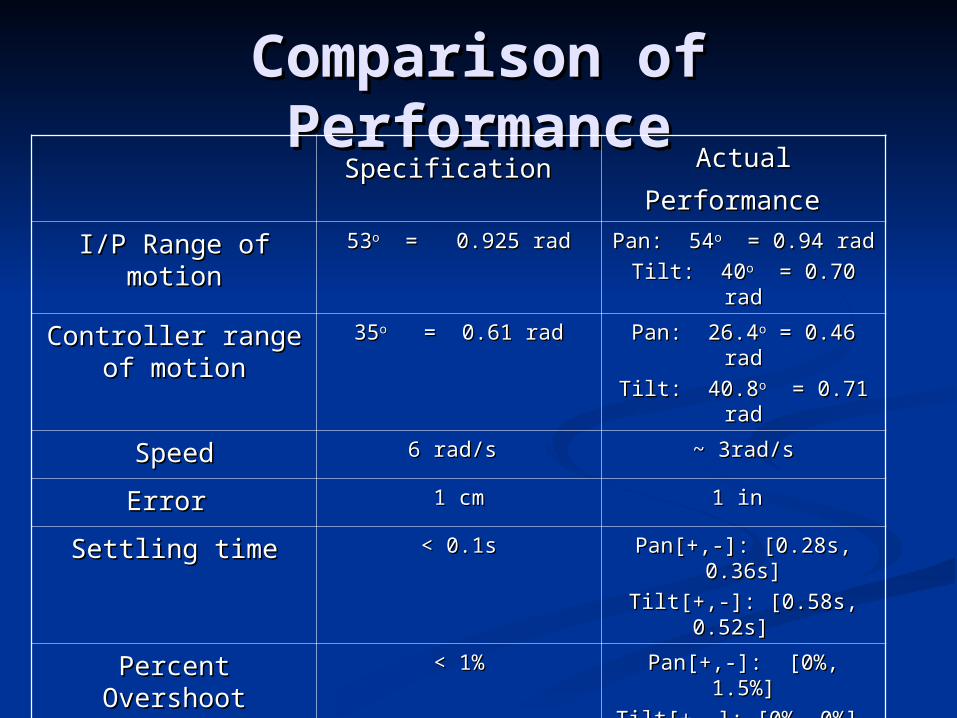
Comparison of Comparison of PerformancePerformance
SpecificationSpecification Actual Actual
PerformancePerformance I/P Range of I/P Range of
motionmotion5353oo = 0.925 rad = 0.925 rad Pan: 54Pan: 54oo = 0.94 rad = 0.94 rad
Tilt: 40Tilt: 40oo = 0.70 rad = 0.70 rad
Controller range of Controller range of motionmotion
3535o o = 0.61 rad= 0.61 rad Pan: 26.4Pan: 26.4oo = 0.46 rad = 0.46 rad
Tilt: 40.8Tilt: 40.8oo = 0.71 rad = 0.71 rad
SpeedSpeed 6 rad/s 6 rad/s ~ 3rad/s~ 3rad/s
Error Error 1 cm1 cm 1 in 1 in
Settling timeSettling time < 0.1s< 0.1s Pan[+,-]: [0.28s, 0.36s]Pan[+,-]: [0.28s, 0.36s]
Tilt[+,-]: [0.58s, 0.52s] Tilt[+,-]: [0.58s, 0.52s]
Percent OvershootPercent Overshoot < 1%< 1% Pan[+,-]: [0%, 1.5%]Pan[+,-]: [0%, 1.5%]
Tilt[+,-]: [0%, 0%] Tilt[+,-]: [0%, 0%]
Steady State ErrorSteady State Error < 0.1< 0.1oo Pan[+,-]: [-0.46, 0.006 ]Pan[+,-]: [-0.46, 0.006 ]
Tilt[+,-]: [0.34, 0.57] Tilt[+,-]: [0.34, 0.57]

System ImprovementSystem Improvement
Max Disturbance without controllerMax Disturbance without controller
1313in on average from each sidein on average from each side
VSVS
Max Disturbance with controllerMax Disturbance with controller
11in from each sidein from each side
Movie: closeup.mpegMovie: closeup.mpeg
Success and challengesSuccess and challenges
Success: Success: movie - mirrorview.mpegmovie - mirrorview.mpeg
Robust ControllerRobust Controller Accurate calculation for desired angles Accurate calculation for desired angles
using math modelusing math model 1300% improvement of disturbance 1300% improvement of disturbance
rejectionrejection Quick interaction between input pan-tilt Quick interaction between input pan-tilt
and controller pan-tilt and controller pan-tilt

Success and challengesSuccess and challenges
Challenges:Challenges: Discrepancy between system model Discrepancy between system model
simulation and physical systemsimulation and physical system Initialization of input and mirror anglesInitialization of input and mirror angles Quantization Effects:Quantization Effects:
Steady-state errorSteady-state error Oscillation due to derivative control Oscillation due to derivative control
Design controller for random input Design controller for random input (different speeds/frequencies)(different speeds/frequencies)

RecommendationsRecommendations
Adaptive controller to allow control Adaptive controller to allow control for random inputfor random input
Calibration systemCalibration system Use Kalman filter to reduce Use Kalman filter to reduce
quantization effectsquantization effects Recalculate mass matrix, inertia Recalculate mass matrix, inertia
matrix and friction calculationmatrix and friction calculation

QuestionsQuestions


















