Landsat-5 TM and Lidar Fusion for Sub-pixel Juniper Tree...
8
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING December 2011 1 Boise Center Aerospace Laboratory, Idaho State University, 322 E. Front Street, Boise, ID 83712 ([email protected]). Photogrammetric Engineering & Remote Sensing Vol. 77, No. 12, December 2011, pp. 000–000. 0099-1112/12/7711–0000/$3.00/0 © 2011 American Society for Photogrammetry and Remote Sensing Abstract Pinyon-juniper woodlands comprise the third most common land-cover type in the United States and have been docu- mented to have drastically increased both in density and extent in recent decades. We explored Landsat-5 TM and Light Detection and Ranging (lidar) data, individually and fused together, for estimating sub-pixel juniper cover. Linear spectral unmixing (LSU), Constrained Energy Minimization (CEM), and Mixture Tuned Matched Filtering (MTMF) tech- niques were compared along with spectral-lidar fusion approaches. None of the Landsat-5 TM-derived estimates were significantly correlated with field-measured juniper cover (n = 100), while lidar-derived estimates were strongly correlated (R 2 = 0.74, p-value 0.001). Fusion of these estimates produced superior results to both classifications individually (R 2 = 0.80, p-value 0.001). The MTMF tech- nique performed best, while a multiple regression-based fusion was the best approach to combining the two data sources. Future studies can use the best sub-pixel classifica- tion and fusion approach to quantify changes in associated ecosystem properties such as carbon. Introduction Pinyon-juniper woodlands comprise the third most common land-cover type in the United States (Huang et al., 2009). Both the tree density and the geographic extent of pinyon-juniper woodlands are documented to have increased by an order of magnitude since the mid-Nineteenth Century throughout the Great Basin, US (Romme et al., 2009). Reported increases in areal extent have ranged between 30 to 625 percent (Romme et al. 2009), while encroachment rates have varied between 0.4 to 4.5 percent per year (Sankey and Germino 2008). Intensive land treatments, including prescribed burning and cutting, are now regularly performed to reduce tree cover where the encroachment is perceived to decrease understory vegetation, increase soil erosion, and deteriorate wildlife habitat for species such as sage-grouse. Most evidence for pinyon-juniper woodland changes is provided by field-based dendrochronological and demographic studies or historical aerial photograph comparisons, which often provide detailed and accurate records of tree stand history and development, but generally cover relatively small spatial extent (Romme et al., 2009). Efficient remote sensing methods to accurately map pinyon-juniper distribution and estimate woodland cover changes over large areas are needed to guide regional policy and identify priority areas for intensive management. In Landsat-5 TM and Lidar Fusion for Sub-pixel Juniper Tree Cover Estimates in a Western Rangeland Temuulen Sankey and Nancy Glenn particular, robust methods to estimate sub-pixel tree percent cover are necessary to assess recent decadal-scale changes in pinyon-juniper woodlands due to: (a) the relatively sparse tree distribution in these vast woodlands, (b) the slow growth rates of trees, and (c) recent temporal coverage and moderate resolution of most satellite data. Satellite image-based approaches have not been com- monly used to monitor pinyon-juniper woodland cover changes. Previous Landsat-5 TM-based studies demonstrated binary classifications of juniper presence and absence (Sankey and Germino, 2008; Sankey et al., 2010). Traditional thematic classification approaches, however, do not provide the details and resolution necessary to detect subtle changes in these woodlands, while high-resolution satellite imagery do not cover the required temporal extent. Only Landsat- type satellite data used with sub-pixel tree cover estimates can allow remote sensing-based monitoring across the vast woodland areas. Once determined, the best approach for sub-pixel tree cover estimates would also enable quantitative estimates of the associated changes in ecosystem properties such as carbon, nitrogen, and water fluxes (e.g., Asner et al., 2003; Huang et al., 2009; Huang et al., 2010). Quantitative estimates of such effects have been limited, although woody vegetation encroachment is thought to have important implications for global and regional carbon dioxide uptake and nitrogen oxide emissions. In this study, we explore: (a) Landsat-5 TM imagery, (b) airborne lidar data, and (c) Landsat-5 TM and lidar fusion for estimating sub-pixel tree cover. We compare: (a) linear spectral unmixing, (b) Mixture Tuned Matched Filtering, and (c) Constrained Energy Minimization to determine the best spectral unmix- ing technique for sub-pixel juniper tree cover estimates. Our objective was to determine the most appropriate image source, fusion approach, and spectral unmixing technique for estimating sub-pixel tree cover in a semi-arid rangeland environment of southwestern Idaho. Lidar data, which have been most commonly used in forestry applications, are now increasingly used for vegeta- tion classification of semi-arid rangelands (Weltz et al., 1994; Ritchie et al., 1995; Rango et al., 2000; Streutker and Glenn, 2006; Mundt et al., 2006; Bork and Su, 2007; Riano et al., 2007; Su and Bork, 2007). Lidar applications, how- ever, have not been explored in woodland encroachment studies. Lidar data are potentially well suited to distinguish
Transcript of Landsat-5 TM and Lidar Fusion for Sub-pixel Juniper Tree...
PHOTOGRAMMETRIC ENGINEER ING & REMOTE SENS ING Decembe r 2011 1
Boise Center Aerospace Laboratory, Idaho State University,322 E. Front Street, Boise, ID 83712 ([email protected]).
Photogrammetric Engineering & Remote Sensing Vol. 77, No. 12, December 2011, pp. 000–000.
0099-1112/12/7711–0000/$3.00/0© 2011 American Society for Photogrammetry
and Remote Sensing
AbstractPinyon-juniper woodlands comprise the third most commonland-cover type in the United States and have been docu-mented to have drastically increased both in density andextent in recent decades. We explored Landsat-5 TM andLight Detection and Ranging (lidar) data, individually andfused together, for estimating sub-pixel juniper cover. Linearspectral unmixing (LSU), Constrained Energy Minimization(CEM), and Mixture Tuned Matched Filtering (MTMF) tech-niques were compared along with spectral-lidar fusionapproaches. None of the Landsat-5 TM-derived estimateswere significantly correlated with field-measured junipercover (n = 100), while lidar-derived estimates were stronglycorrelated (R2 = 0.74, p-value �0.001). Fusion of theseestimates produced superior results to both classificationsindividually (R2 = 0.80, p-value �0.001). The MTMF tech-nique performed best, while a multiple regression-basedfusion was the best approach to combining the two datasources. Future studies can use the best sub-pixel classifica-tion and fusion approach to quantify changes in associatedecosystem properties such as carbon.
IntroductionPinyon-juniper woodlands comprise the third most commonland-cover type in the United States (Huang et al., 2009). Boththe tree density and the geographic extent of pinyon-juniperwoodlands are documented to have increased by an order ofmagnitude since the mid-Nineteenth Century throughout theGreat Basin, US (Romme et al., 2009). Reported increases inareal extent have ranged between 30 to 625 percent (Rommeet al. 2009), while encroachment rates have varied between0.4 to 4.5 percent per year (Sankey and Germino 2008).Intensive land treatments, including prescribed burning andcutting, are now regularly performed to reduce tree coverwhere the encroachment is perceived to decrease understoryvegetation, increase soil erosion, and deteriorate wildlifehabitat for species such as sage-grouse. Most evidence forpinyon-juniper woodland changes is provided by field-baseddendrochronological and demographic studies or historicalaerial photograph comparisons, which often provide detailedand accurate records of tree stand history and development,but generally cover relatively small spatial extent (Romme etal., 2009). Efficient remote sensing methods to accurately mappinyon-juniper distribution and estimate woodland coverchanges over large areas are needed to guide regional policyand identify priority areas for intensive management. In
Landsat-5 TM and Lidar Fusion for Sub-pixel Juniper Tree Cover Estimates
in a Western RangelandTemuulen Sankey and Nancy Glenn
particular, robust methods to estimate sub-pixel tree percentcover are necessary to assess recent decadal-scale changes inpinyon-juniper woodlands due to: (a) the relatively sparse treedistribution in these vast woodlands, (b) the slow growth ratesof trees, and (c) recent temporal coverage and moderateresolution of most satellite data.
Satellite image-based approaches have not been com-monly used to monitor pinyon-juniper woodland coverchanges. Previous Landsat-5 TM-based studies demonstratedbinary classifications of juniper presence and absence(Sankey and Germino, 2008; Sankey et al., 2010). Traditionalthematic classification approaches, however, do not providethe details and resolution necessary to detect subtle changesin these woodlands, while high-resolution satellite imagerydo not cover the required temporal extent. Only Landsat-type satellite data used with sub-pixel tree cover estimatescan allow remote sensing-based monitoring across the vastwoodland areas. Once determined, the best approach forsub-pixel tree cover estimates would also enable quantitativeestimates of the associated changes in ecosystem propertiessuch as carbon, nitrogen, and water fluxes (e.g., Asner et al.,2003; Huang et al., 2009; Huang et al., 2010). Quantitativeestimates of such effects have been limited, although woodyvegetation encroachment is thought to have importantimplications for global and regional carbon dioxide uptakeand nitrogen oxide emissions. In this study, we explore:(a) Landsat-5 TM imagery, (b) airborne lidar data, and(c) Landsat-5 TM and lidar fusion for estimating sub-pixeltree cover. We compare: (a) linear spectral unmixing,(b) Mixture Tuned Matched Filtering, and (c) ConstrainedEnergy Minimization to determine the best spectral unmix-ing technique for sub-pixel juniper tree cover estimates.Our objective was to determine the most appropriate imagesource, fusion approach, and spectral unmixing techniquefor estimating sub-pixel tree cover in a semi-arid rangelandenvironment of southwestern Idaho.
Lidar data, which have been most commonly used inforestry applications, are now increasingly used for vegeta-tion classification of semi-arid rangelands (Weltz et al.,1994; Ritchie et al., 1995; Rango et al., 2000; Streutker andGlenn, 2006; Mundt et al., 2006; Bork and Su, 2007; Rianoet al., 2007; Su and Bork, 2007). Lidar applications, how-ever, have not been explored in woodland encroachmentstudies. Lidar data are potentially well suited to distinguish

sparsely-distributed individual trees from lower-staturedbackground vegetation of shrubs and herbaceous species.Previous lidar fusion with spectral data has incorporatedlidar derivatives with hyperspectral (Andersen et al., 2008),multispectral (Lee and Shan, 2003; Wulder et al., 2009), andmulti-angle spectral data (Kimes et al., 2006) as well assynthetic aperture radar data (Hyde et al., 2006 and 2007).In particular, lidar data has been fused to improve accura-cies of tree canopy metrics with Landsat ETM+, Ikonos, andQuickBird imagery using regression and kriging models(Hudak et al., 2002; Donoghue and Watt, 2006; Mutlu et al.,2008). Some lidar fusion studies report that lidar data aloneaccurately estimates tree crown metrics and the fusion withspectral data results in marginal or no improvements inaccuracies (Hyde et al., 2006; Erdody and Moskal, 2010).The utility of lidar fusion in improving sub-pixel estimatesof a target cover type has not been widely tested, especiallyin rangeland ecosystems. Lidar fusion has greater potentialto improve classification accuracies in rangeland environ-ments, because rangeland vegetation can be spectrallyindeterminate (Okin et al., 2001) and the structural deriva-tives from lidar data can provide a unique opportunity toseparate varying vegetation functional groups.
Pixels in Landsat-5 TM imagery cover 900 m2 (30 m �30 m) in size and thus often include a mixture of vegetationcover types. This is particularly evident in woodlands andjuniper-encroached rangelands where juniper trees aredispersed amongst herbaceous and sagebrush cover types.Linear spectral unmixing (LSU) analysis produces a mixture,which represents a linear combination of the endmembers orcover types, weighted by the areal coverage of each endmem-ber in a pixel (Rencz, 1999). Compared to these models, theMixture Tuned Matched Filtering (MTMF) is thought to bebetter suited for mixed pixels with cover types having similarspectral signatures, because the MTMF suppresses backgroundnoise and provides a measure of false positives (Boardman,1998) that are inherent in remote sensing of semiarid vegeta-tion (e.g., Okin et al., 2001). The MTMF also allows less than100 percent abundance of the training spectrum (e.g., use ofmean spectra) (Glenn et al., 2005), in comparison to LSUwhich assumes pure training endmembers of 100 percentabundance. Similar to the unconstrained linear spectralunmixing, the matched filter of the MTMF is an unconstrainedspectral mixture analysis technique. Both the LSU and MTMFtechniques produce negative target cover estimates as well asestimates greater than 100 percent, which are difficult tocorrelate to 0 to 100 percent cover range observed in ground-truth data. Similar to the matched filtering of the MTMF, theConstrained Energy Minimization (CEM) suppresses theunknown spectral background while highlighting the knowntarget signature. The CEM is a linear operator which mini-mizes the total energy in the image while the target signatureis constrained (Harsanyi, 1993). CEM and MTMF are usefulwhen not all spectral endmembers are known.
MethodsStudy Site DescriptionThe data presented here were collected at the Reynolds CreekExperimental Watershed (RCEW), which is administered by theUnited States Department of Agriculture ‐ Agricul-tural Research Service. The RCEW was established in 1960 asone of several experimental watersheds for hydrologic andnatural resources research (Slaughter et al., 2001). Thewatershed is 238 km2 in extent and ranges in elevation from�1000 m to �2000 m. Corresponding annual precipitationranges from 230 mm/year at the lower elevations to �1,100mm/year at the higher elevations. Soils are derived from
granitic and volcanic rocks as well as lakebed sediments.Plant communities at lower elevations are typical of the GreatBasin Desert and dominated by mixed sagebrush (Artemisiaspp.) and herbaceous species. At higher elevations, mountainbig sagebrush (Artemisia tridentata vaseyana), aspen (Populustremuloides), and Douglas-fir (Pseudotsuga menziesii) arecommon. Detailed information on watershed geography,vegetation, soils, hydrology, and weather can be obtainedfrom previously published references (Hanson, 2001; Hansonet al., 2001; Pierson et al., 2001; Seyfried et al., 2001a,b,c,and d). Within the RCEW, this study focused on three areas ofhistoric western juniper (Juniperus occidentalis) distribution(Plate 1) which is documented to be increasing in extent anddensity (Sankey et al., 2010).
Landsat-5 TM image AnalysisA multi-temporal composite of summer- and fall-seasonLandsat-5 Thematic Mapper (TM) satellite images (30 m �30 m pixels) was used. The Landsat-5 TM multi-temporalcomposite consisted of two images (Path 42 and Row 30)acquired on 09 July 2008 and 29 October 2008. First, bothimages were: (a) corrected for atmospheric effects using theFLAASH module (Atmospheric model: sub-arctic summer;No aerosol and water retrieval; Aerosol model: rural; Watercolumn multiplier: 1; Initial visibility: 40 km) in ENVIsoftware (ENVI, Version 4.5, ITT Industries Inc., 2008,Boulder, Colorado), (b) projected in UTM Zone 11N, NAD1983 projection and datum, (c) georectified and co-registered(all root mean square errors �7 m), and (d) subset to thestudy areas. Spectra from corresponding stable targets (e.g.,roads, bare ground) in both images were compared andfound to be similar and thus, image normalization was notdeemed necessary. Then, the summer image bands 2 (0.52 to0.60 �m), 3 (0.63 to 0.69 �m), 4 (0.76 to 0.90 �m), and 5(1.55 to 1.75 �m) were spectrally subset and stacked withthe fall image bands 2, 3, and 4 to generate the multi-temporal composite. This combination of bands and dateswas used to separate evergreen junipers from the back-ground sagebrush-herbaceous vegetation mix by takingadvantage of the spectral reflectance changes due to thesenescent herbaceous vegetation and lower greenness of theshrubs in the fall compared to the summer. Furthermore, themulti-temporal stacking increased the number of relevantbands available for the spectral unmixing (see Singh andGlenn, 2009). The multi-temporal composite image was thenclassified using constrained (sum of 1) and unconstrainedlinear spectral unmixing (LSU), Mixture Tuned MatchedFiltering (MTMF), and Constrained Energy Minimization(CEM) techniques in ENVI software to estimate sub-pixeljuniper percent cover. The LSU requires an input of all covertypes as training endmembers. A field-mapped pixel ofmaximum juniper canopy cover of �95 percent (juniperfoliage, woody stems, and shade combined) along with purepixels of rangeland vegetation (sagebrush and herbaceousspecies combined) and bare ground were used as trainingendmembers. Previous studies documented that a user-guided endmember pixel with high percentage target coverperformed better than extreme or variant n-dimensionalvisualizer (ND-V) endmember pixels and the mean of all ND-V endmember pixels (Mitchell and Glenn, 2009). The MTMFand CEM both produce a raster band that estimates the targetcover abundance within each pixel. The MTMF techniqueproduces two raster bands: (a) matched filtering scores thatestimates target cover abundance, and (b) infeasibility valueswhich represent the likelihood of false positives in thematched filtering scores. In the first band, a matchedfiltering (MF) score near 0 indicates background signal ornoise, while a score of 1 corresponds to 100 percent abun-dance of the target spectrum within a pixel. In the second
2 Decembe r 2011 PHOTOGRAMMETRIC ENGINEER ING & REMOTE SENS ING
band, high infeasibility scores indicate greater likelihoodthat pixels are false positives.
Lidar Data AnalysisThe lidar data were acquired in November 2007 throughWatershed Sciences, Inc. using a Leica ALS50 Phase II lasermounted on a Cessna Caravan 208B fixed wing aircraft flyingat a 900 m height and 105 knot speed with 50 percentflightline overlap. The study sites spanned across 15 post-processed lidar data tiles, which included a total of 38 originalflightlines. The Leica ALS50 Phase II is a discrete return systemthat measures up to four laser returns per pulse. The lidarpoint cloud data had a maximum of four returns and meanpoint density of 5.6 points/m2. The mean horizontal relativeand absolute accuracies were 32 cm and 33 cm, respectively,as reported by the vendor. The vertical accuracy was approxi-mately 10 cm. Each point had the following attribute informa-tion: scan angle, return number, intensity, X, Y, and Z. Usingthe methods and associated publically available lidar process-ing tools described in Streutker and Glenn (2006)(http://bcal.geology.isu.edu/envitools.shtml), the point cloud
data were subset to the three study areas, height-filtered toseparate ground returns and vegetation returns, and convertedinto a raster format (30 m � 30 m pixels) to generate threeraster bands: maximum vegetation height, mean vegetationheight, and vegetation roughness, which is the standarddeviation of vegetation heights within each pixel. In addition,a separate raster band was created using the height-filteredlidar point data to generate a maximum vegetation height mapin 3 m raster cell size. A binary maximum vegetation heightmap was then produced from this raster image using a 3 mheight threshold. All pixels having maximum vegetationheight of �3 m were classified as juniper presence, while allother pixels were classified as juniper absence. This heightthreshold was chosen based on the following: (a) field-basedand lidar-derived big sagebrush and bitterbrush heights at theRCEW ranged up to 3 m (Sankey et al., 2010), and (b) the lidar-derived tree heights at the RCEW were significantly correlatedwith field-measured tree heights (Sankey et al., 2010; R2 = 0.80 and p-value �0.0001). The 3 m-resolution binaryheight map was used in ArcMap® 9.3 software to classify juniperpercent cover within 30 m � 30 m cells. A grid of 30 m � 30 m
PHOTOGRAMMETRIC ENGINEER ING & REMOTE SENS ING Decembe r 2011 3
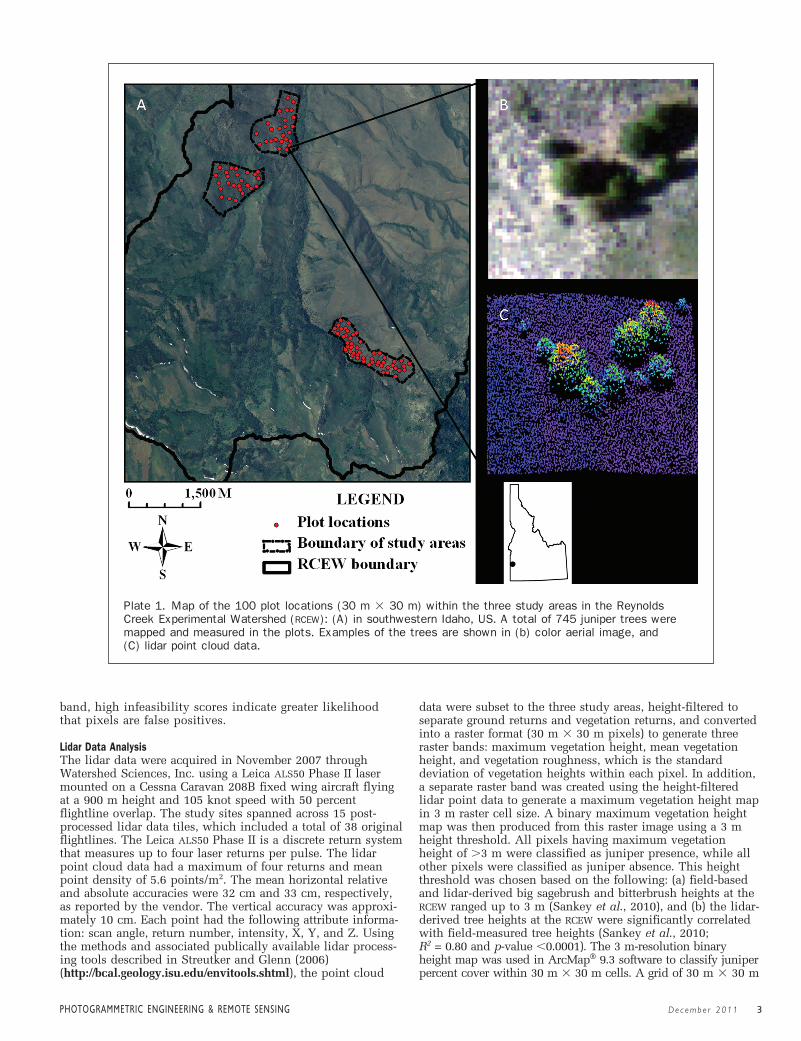
Plate 1. Map of the 100 plot locations (30 m � 30 m) within the three study areas in the ReynoldsCreek Experimental Watershed (RCEW): (A) in southwestern Idaho, US. A total of 745 juniper trees weremapped and measured in the plots. Examples of the trees are shown in (b) color aerial image, and (C) lidar point cloud data.
cells of each study area was overlaid on the 3 m resolutionbinary height map and the number and percent of the 3 mpixels classified as having juniper presence within each 30 m� 30 m cell was calculated to estimate juniper percent cover.The 3 m raster cell size was selected as the most appropriatefor juniper sizes in the study area after examining severaldifferent pixel sizes. The 3 m cell size was also most appropri-ate to scale up to 30 m cell sizes, since 100 of these cells fitinto one 30 m cell thereby automatically converting thejuniper presence counts into a percent estimate. The resultwas a lidar-derived sub-pixel juniper cover estimate in each30 m cell.
Landsat-5 TM and Lidar FusionTwo different fusion approaches were explored. First, thethree rasterized lidar bands of maximum vegetation height,mean vegetation height, and vegetation roughness werestacked with the Landsat-5 TM multi-temporal compositeimage bands to generate a fusion of Landsat-5 TM and lidarbands (hereafter referred to as “TM-lidar band fusion”). TheTM-lidar band fusion resulted in ten bands (seven TM bandsand three lidar bands). The TM-lidar band fusion image wasthen classified using the constrained and unconstrained LSU,MTMF, and CEM techniques. Second, a regression-based fusionapproach was explored by combining the sub-pixel junipercover estimates resulting from the TM-lidar band fusion withthe lidar-derived juniper cover estimates in a multiple regres-sion. The multiple regression only used the MTMF estimatesof sub-pixel juniper cover, since the MTMF classificationperformed best of all the spectral unmixing techniques.
Field MethodsField work was completed during the months of July andAugust 2009 to estimate juniper percent cover. Prior to fieldwork, a total of 100 random points were generated within thethree study areas using Hawth’s tools in Esri ArcMap® 9.3software (Esri, Inc, 1999-2006). A 30 m � 30 m (Landsat-5TM) pixel at each of these random points was selected and thecoordinates of the four corners of each pixel determined fromthe imagery. We established field plots by navigating with aTrimble GeoXT GPS receiver (sub-meter post-processinghorizontal accuracy) to the four corners of the corresponding30 m � 30 m area on the ground (Plate 1). Within each 30 m� 30 m field plot, every juniper stem was mapped, measuredfor height, and classified as either mature tree (>8 cm indiameter at 30 cm height) or seedling (�8 cm in diameter at30 cm height). Canopy width of all individual juniper stemswas measured. Total juniper canopy percent cover in eachplot was then estimated by adding canopy area measurementsof all trees in the plot (Miller and Rose, 1999) and thensubtracting overlapping canopy areas. Overlapping canopyareas were estimated using the canopy width measurementsas a buffer around each tree point location and calculating theareas with overlapping buffers in ArcMap® 9.3 software.
Statistical AnalysisRegression analyses were used to correlate the image-derivedand field-measured juniper cover estimates (SPSS 14.0 forWindows, 2005). The LSU, CEM, and lidar-derived estimatesof juniper cover were assessed using simple linear regressionmodels. The MTMF estimates of sub-pixel juniper cover inboth the Landsat-5 TM image and TM-lidar band fusion wereassessed using multiple regression models, where thematched filtering scores, infeasibility values, and theirinteraction term were the predictor variables and the field-measured juniper cover was the response variable. Aseparate multiple regression model was constructed tocombine the TM-lidar band fusion MTMF estimates with thelidar-derived estimates of juniper cover. In this model, the
MTMF matched filtering scores, infeasibility values, and theirinteraction term and the lidar-derived juniper cover esti-mates were the predictor variables, while the field-measuredjuniper cover was the response variable.
To further evaluate the agreement between field-measured and model-predicted juniper cover, mean squareddeviation (MSD) between the two measurements was exam-ined. The MSD is an important statistic that can be used tocompare predicted and measured values. It can be dividedinto three components: Standard Bias (SB), Non-Unity Slope(NU), and Lack of Correlation (LC) using the followingEquations 1 through 4 (Gauch et al., 2003):
(1)
(2)
(3)
(4)
where n refers to the sample size of either measured orpredicted values, μ is the mean of either measured or pre-dicted values, b is the slope of the regression line through theplot of predicted values as a function of measured values, Nis the number of pairs of measured and predicted values, andr2 is the square of the correlation. SB quantifies the proportionof the MSD related to the deviance of the regression fit from a1:1 relationship (Sankey et al., 2008) and SB �0 if theintercept a � 0 (Gauch et al., 2003). NU quantifies theproportion of the MSD related to the deviance of the regres-sion fit from a 1:1 relationship in the slope of the regressionline (Sankey et al., 2008) and NU �0 if slope b � 1. LCquantifies the proportion of the MSD related to the scatter ofthe points around the regression line (Sankey et al., 2008).
ResultsA total of 745 juniper stems were mapped in the 100 plots.Of these, 59 percent were mature and �3 m in height, while41 percent were seedlings with �3 m height. Mean maturetree height was 4.6 m, while mean seedling height was 1.5 m.Mean juniper stem density was 92 stems/ha. Mean junipercanopy cover was 7.3 percent at the 30 m � 30 m plot scale.
The constrained and unconstrained LSU estimates of sub-pixel juniper cover in the Landsat-5 TM image alone were thesame and not significantly correlated with the field-measuredjuniper cover (R2 = 0.003 and p-value = 0.571 for both models).The MTMF infeasibility values in the Landsat-5 TM image weresignificantly correlated with field-measured juniper cover (R2 = 0.09, p-value = 0.004), but the matched filtering scoreswere not significantly correlated (p-value = 0.533). The CEMestimates of sub-pixel juniper cover in the Landsat-5 TM imagewere also not significantly correlated with the field-measuredjuniper cover (R2 = 0.004, p-value = 0.550).
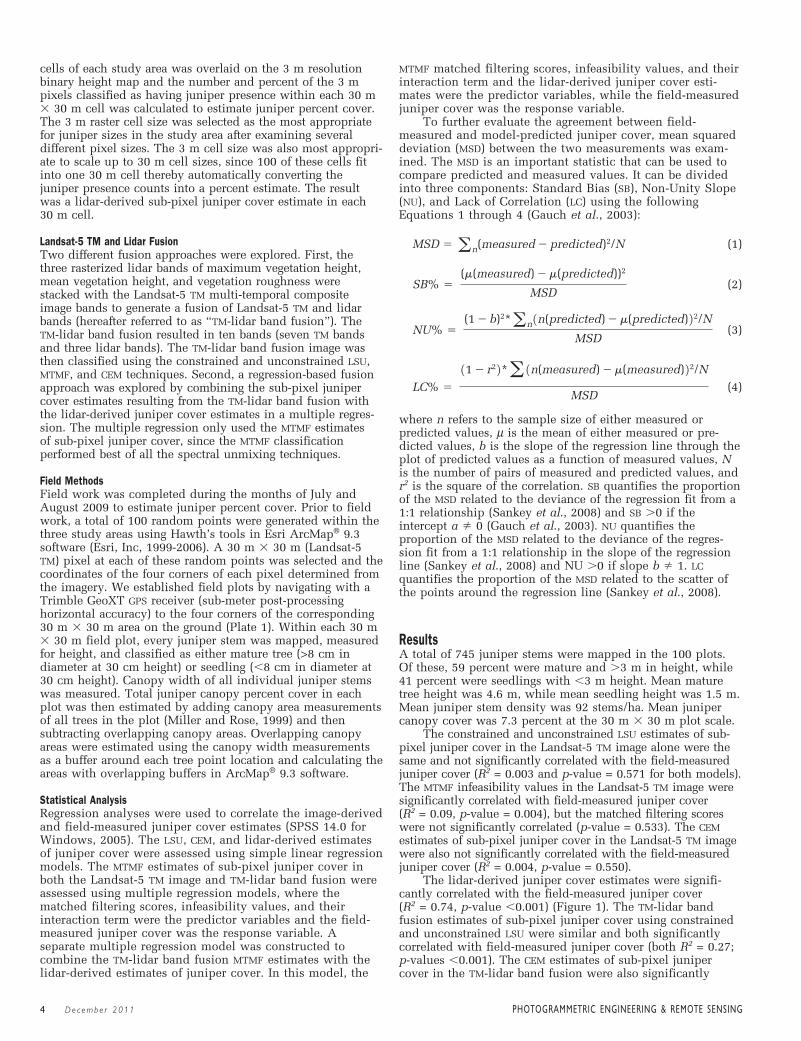
The lidar-derived juniper cover estimates were signifi-cantly correlated with the field-measured juniper cover (R2 = 0.74, p-value �0.001) (Figure 1). The TM-lidar bandfusion estimates of sub-pixel juniper cover using constrainedand unconstrained LSU were similar and both significantlycorrelated with field-measured juniper cover (both R2 = 0.27;p-values �0.001). The CEM estimates of sub-pixel junipercover in the TM-lidar band fusion were also significantly
LC% � 11 � r22*a 1n(measured) � m(measured)22/N
MSD
NU% � (1 � b)2*an1n(predicted) � m(predicted)22/N
MSD
SB% � (m(measured) � m(predicted))2
MSD
MSD � an(measured � predicted)2/N
4 Decembe r 2011 PHOTOGRAMMETRIC ENGINEER ING & REMOTE SENS ING
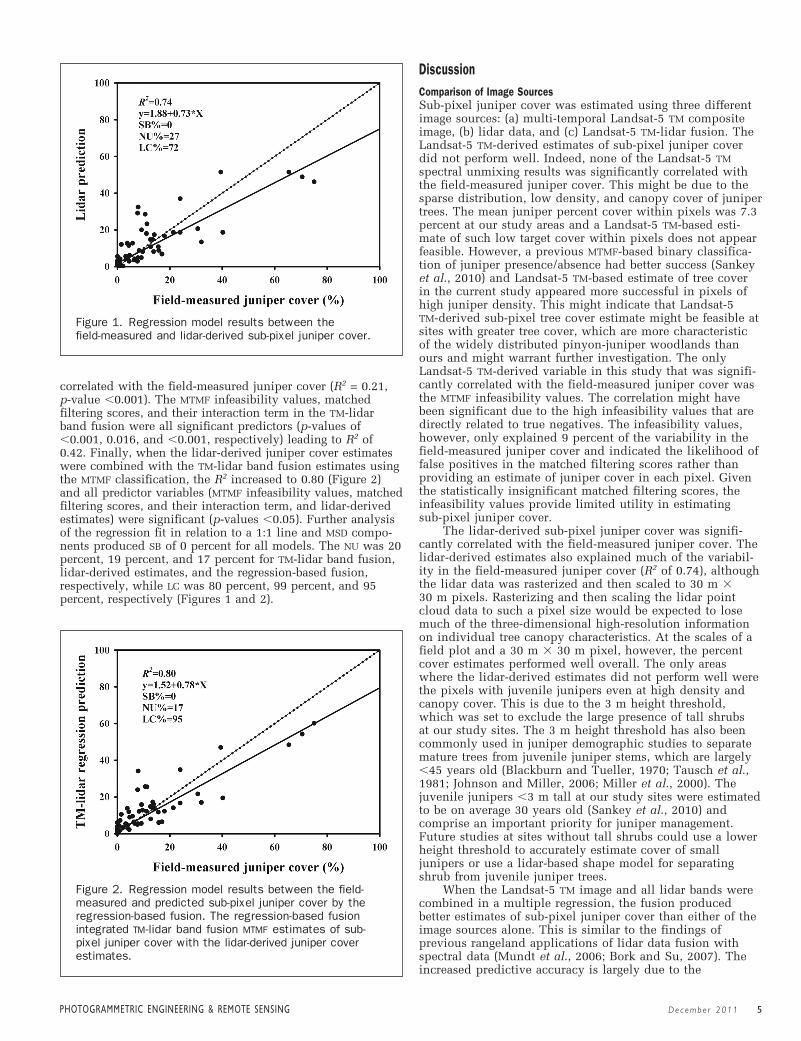
correlated with the field-measured juniper cover (R2 = 0.21, p-value �0.001). The MTMF infeasibility values, matchedfiltering scores, and their interaction term in the TM-lidarband fusion were all significant predictors (p-values of�0.001, 0.016, and �0.001, respectively) leading to R2 of0.42. Finally, when the lidar-derived juniper cover estimateswere combined with the TM-lidar band fusion estimates usingthe MTMF classification, the R2 increased to 0.80 (Figure 2)and all predictor variables (MTMF infeasibility values, matchedfiltering scores, and their interaction term, and lidar-derivedestimates) were significant (p-values �0.05). Further analysisof the regression fit in relation to a 1:1 line and MSD compo-nents produced SB of 0 percent for all models. The NU was 20percent, 19 percent, and 17 percent for TM-lidar band fusion,lidar-derived estimates, and the regression-based fusion,respectively, while LC was 80 percent, 99 percent, and 95percent, respectively (Figures 1 and 2).
DiscussionComparison of Image SourcesSub-pixel juniper cover was estimated using three differentimage sources: (a) multi-temporal Landsat-5 TM compositeimage, (b) lidar data, and (c) Landsat-5 TM-lidar fusion. TheLandsat-5 TM-derived estimates of sub-pixel juniper coverdid not perform well. Indeed, none of the Landsat-5 TMspectral unmixing results was significantly correlated withthe field-measured juniper cover. This might be due to thesparse distribution, low density, and canopy cover of junipertrees. The mean juniper percent cover within pixels was 7.3percent at our study areas and a Landsat-5 TM-based esti-mate of such low target cover within pixels does not appearfeasible. However, a previous MTMF-based binary classifica-tion of juniper presence/absence had better success (Sankeyet al., 2010) and Landsat-5 TM-based estimate of tree coverin the current study appeared more successful in pixels ofhigh juniper density. This might indicate that Landsat-5 TM-derived sub-pixel tree cover estimate might be feasible atsites with greater tree cover, which are more characteristicof the widely distributed pinyon-juniper woodlands thanours and might warrant further investigation. The onlyLandsat-5 TM-derived variable in this study that was signifi-cantly correlated with the field-measured juniper cover wasthe MTMF infeasibility values. The correlation might havebeen significant due to the high infeasibility values that aredirectly related to true negatives. The infeasibility values,however, only explained 9 percent of the variability in thefield-measured juniper cover and indicated the likelihood offalse positives in the matched filtering scores rather thanproviding an estimate of juniper cover in each pixel. Giventhe statistically insignificant matched filtering scores, theinfeasibility values provide limited utility in estimating sub-pixel juniper cover.
The lidar-derived sub-pixel juniper cover was signifi-cantly correlated with the field-measured juniper cover. Thelidar-derived estimates also explained much of the variabil-ity in the field-measured juniper cover (R2 of 0.74), althoughthe lidar data was rasterized and then scaled to 30 m �30 m pixels. Rasterizing and then scaling the lidar pointcloud data to such a pixel size would be expected to losemuch of the three-dimensional high-resolution informationon individual tree canopy characteristics. At the scales of afield plot and a 30 m � 30 m pixel, however, the percentcover estimates performed well overall. The only areaswhere the lidar-derived estimates did not perform well werethe pixels with juvenile junipers even at high density andcanopy cover. This is due to the 3 m height threshold,which was set to exclude the large presence of tall shrubsat our study sites. The 3 m height threshold has also beencommonly used in juniper demographic studies to separatemature trees from juvenile juniper stems, which are largely�45 years old (Blackburn and Tueller, 1970; Tausch et al.,1981; Johnson and Miller, 2006; Miller et al., 2000). Thejuvenile junipers �3 m tall at our study sites were estimatedto be on average 30 years old (Sankey et al., 2010) andcomprise an important priority for juniper management.Future studies at sites without tall shrubs could use a lowerheight threshold to accurately estimate cover of smalljunipers or use a lidar-based shape model for separatingshrub from juvenile juniper trees.
When the Landsat-5 TM image and all lidar bands werecombined in a multiple regression, the fusion producedbetter estimates of sub-pixel juniper cover than either of theimage sources alone. This is similar to the findings ofprevious rangeland applications of lidar data fusion withspectral data (Mundt et al., 2006; Bork and Su, 2007). Theincreased predictive accuracy is largely due to the
PHOTOGRAMMETRIC ENGINEER ING & REMOTE SENS ING Decembe r 2011 5
Figure 2. Regression model results between the field-measured and predicted sub-pixel juniper cover by theregression-based fusion. The regression-based fusionintegrated TM-lidar band fusion MTMF estimates of sub-pixel juniper cover with the lidar-derived juniper coverestimates.
Figure 1. Regression model results between the field-measured and lidar-derived sub-pixel juniper cover.
complimentary characteristics of the two distinct data types.Sparsely-distributed mature juniper trees at low canopypercent cover were represented in the lidar bands due totheir heights and, therefore, better classified in the fusion.Meanwhile, juniper seedlings at high density, which werenot classified in the lidar-derived classification due to theirlow stature, were likely represented in the Landsat-5 TMbands. Fused together, the Landsat-5 TM and lidar databetter represented both juvenile and mature juniper treesthan either of the imagery alone. However, the improvementin juniper cover estimates using the fusion was a marginal 6percent increase over the lidar data alone. This is consistentwith the results of other lidar fusion studies on tree canopymetrics. Erdody and Moskal (2010) reported only 2 to 5percent improvements when lidar predictions of tree canopyfuel and canopy bulk density were fused with color near-infrared imagery predictions. Hyde et al. (2006) alsoreported limited improvements of 0 to 5 percent by fusinglidar predictions of tree biomass with INSAR, QuickBird, andLandsat ETM data.
Taken together, these results suggest that the ultimategoal of future studies need to be carefully considered beforeextensively investing into lidar fusion with spectral data.While no significance testing was performed in this study,our objective is to present the utility of each data source inestimating sub-pixel tree cover. We recommend lidar fusionwith Landsat-5 TM data for sub-pixel target cover estimates,if the goal is the most accurate target cover predictionpossible. However, lidar data alone would suffice, if the goalis to estimate target cover in a simple, efficient manner. Insuch instances, the limitations introduced by potentialvegetation height thresholds such as the one used in thisstudy should be recognized. For example, land managers areparticularly interested in detecting juvenile junipers duringthe early stages of juniper encroachment into rangelands,because juniper encroachment effects of decreased under-story vegetation and increased soil erosion are more easilycontrolled at this stage.
Comparison of Fusion ApproachesThe multi-temporal Landsat-5 TM composite image and thelidar data were fused using two different approaches. First,the multi-temporal Landsat-5 TM image bands were stackedwith the rasterized lidar bands. This was a simple andstraightforward approach. The resulting TM-lidar band fusionproduced sub-pixel juniper cover estimates which were allsignificantly correlated with the field measurements,regardless of the spectral unmixing technique used. Theband fusion resulted in substantial improvements over theLandsat-5 TM data, especially considering the poor perform-ance of all the spectral unmixing techniques used withLandsat-5 TM data alone. This might be due to the increasednumber of relevant bands from the two different types ofdata, which might indicate that all of the four spectralunmixing techniques used in this study benefit fromincreased number of bands well above the statisticallyimportant number of bands (the required number of bandsfor spectral unmixing equals n - 1 endmembers). If thesignal to noise ratio (SNR) of the Landsat-5 TM data wereimproved, for example to 500:1, such as with the LandsatData Continuity Mission’s Operational Land Imager (OLI)(Irons and Dwyer, 2010), the spectral unmixing analysismight be improved. The TM-lidar band fusion, however,produced poorer results compared to lidar-derived estimatesalone. We conclude that Landsat-5 TM and lidar data fusionusing simple band stacking is not an effective approach,even though the resulting band combination performs betterthan Landsat-5 TM data alone. The band stacking approachis also somewhat cumbersome due to image co-registration
issues. The results of such a fusion approach are likely to beimpacted by pixel misregistration of the images fromdifferent platforms, despite thorough efforts to minimizesuch effects.
Second, a regression-based approach was used tocombine the TM-lidar band fusion MTMF outputs with thelidar-derived juniper cover estimates. It was simple toimplement and produced better results than the TM-lidarband fusion approach. Indeed, the regression-based fusionprovided the most accurate estimates of juniper covercompared to all other estimates. This supports the conclu-sions of a previous juniper study at the RCEW which focusedon juniper presence and absence classification using Land-sat-5 TM and lidar fusion (Sankey et al., 2010). When theagreement between the regression-predicted and observedjuniper cover estimates were further examined, the regres-sion-based fusion produced smaller MSD, compared to theTM-lidar band fusion approach. While the standard bias wassimilar between the two fusion approaches, the regression-based fusion also produced a smaller non-unity slopeindicating a lesser proportion of the error introduced by theregression slope than in the TM-lidar band fusion approach.We recommend multiple regression-based approaches tofusing lidar data with spectral imagery for future sub-pixelclassification studies. The observed superior performance ofthe regression-based fusion in this study might have beendue to the combination of post-classification, sub-pixelestimates rather than the original image bands as in the TM-lidar band fusion approach. When we stacked the lidar-derived sub-pixel juniper cover estimates with all theoriginal bands in the TM-lidar band fusion and then per-formed MTMF classification for comparison purposes, theresulting coefficient of determination was much lower (R2 of0.36 compared to 0.80 in the regression-based fusionapproach). Our results support the recommendations ofprevious studies that integrated post-classification lidarderivatives with spectral image-based classifications (Mundtet al., 2006; Erdody and Moskal, 2010).
Comparison of Spectral Unmixing TechniquesThree different spectral unmixing techniques were explored:(a) linear spectral unmixing (LSU), (b) Mixture TunedMatched Filtering (MTMF), and (c) Constrained EnergyMinimization (CEM). Among them, CEM performed worst,likely due to the low percent cover of the juniper (mean 7.3percent cover). When used with the Landsat-5 TM dataalone, this technique produced sub-pixel estimates whichwere not significantly correlated with the field measure-ments. It produced better results with the TM-lidar bandfusion, but the regression coefficient of determination was alow 0.21. The linear spectral unmixing technique producedsimilarly poor results regardless of whether or not a sum-to-one constraint was enforced. The LSU resulted in nosignificant correlation and a low regression coefficient ofdetermination of 0.27, when used with Landsat-5 TM dataand the TM-lidar band fusion, respectively. These results arecontrary to conclusions by other linear spectral unmixingstudies that used Landsat imagery to estimate tree fractionswithin pixels (Chen et al., 2004; Small and Lu, 2006).
The MTMF technique performed best among the threetechniques compared. Its estimates of sub-pixel junipercover had the strongest correlation with the field measure-ments. This technique, however, provides the least user-friendly approach among the three techniques. The MTMFtechnique produces two separate bands, which ultimatelyare combined to leverage their predictive capabilities fortarget cover mapping. There is, however, no automatedapproach to combining the two bands. A user-definedapproach is required to produce a final map of the target
6 Decembe r 2011 PHOTOGRAMMETRIC ENGINEER ING & REMOTE SENS ING

cover type (Mitchell and Glenn, 2009a and 2009b; Sankey,2009). Furthermore, the two bands are cumbersome to useeven in a regression-based approach. For example, theLandsat-5 TM matched filtering scores in this study resultedin no statistically significant correlation with the fieldmeasurements, while the infeasibility values did. If theregression model was to be further fine-tuned, the statisti-cally insignificant band would have to be excluded from themodel. In such cases, both bands resulting from MTMFcannot be effectively leveraged.
ConclusionsThis study compared different image sources, fusionapproaches, and spectral unmixing techniques for estimatingsub-pixel tree cover in a semi-arid rangeland environment.We recommend both lidar and Landsat-5 TM data classifiedusing the MTMF spectral unmixing technique and fused in aregression-based approach. The recommended image source,fusion approach, and spectral unmixing technique can beeasily applied to mapping other woody vegetation encroach-ment, which is currently attracting increasing concernsthroughout the western US. Our results also indicated thatlidar-derived estimates can be effectively used alone for sub-pixel tree cover classification. However, spectral dataare necessary for locating juvenile junipers dispersed amongtall shrubs.
AcknowledgmentsResearch was funded by Grant No. NA05OAR4601137 fromthe NOAA Earth System Research Laboratory PhysicalSciences Division and the BLM Owyhee Uplands PilotProject (ISU-BLM Agreement No. DLA060249).
ReferencesAsner, G.P., S. Archer, F.R. Hughes, J.R. Ansley, and C.A. Wessman,
2003. Net changes in regional woody vegetation cover andcarbon storage in Texas drylands, 1937-1999, Global ChangeBiology, 9:316–335.
Blackburn, W.H., and P.T. Tueller, 1970. Pinyon and juniperinvasion in black sagebrush communities in east-centralNevada, Ecology, 51:841–848.
Boardman, J.W. 1998. Leveraging the high dimensionality of AVIRISdata for improved sub-pixel target unmixing and rejection offalse positives: Mixture tuned matched filtering, Proceedings ofAVIRIS 1998, JPL: Pasadena, California, 6 p.
Bork, E.W., and J.G. Su, 2007. Integrating LiDAR data and multispec-tral imagery for enhanced classification of rangeland vegetation:A meta analysis, Remote Sensing of Environment, 111:11–24.
Chen, X., L. Vierling, E. Rowell, and T. DeFelice, 2004. Using lidarand effective LAI data to evaluate IKONOS and Landsat 7ETM vegetation cover estimates in a ponderosa pine forest,Remote Sensing of Environment, 91:14–26.
Donoghue, D.N.M. and P.J. Watts, 2006. Using LIDAR to compareforest height estimates from IKONOS and Landsat ETM datain Sitka spruce plantation forest, International Journal ofRemote Sensing, 27:2161–2175.
Erdody, T. and L.M. Moskal, 2010. Fusion of LiDAR and imageryfor estimating forest canopy fuels, Remote Sensing of Environ-ment, 114:725–737.
Irons, J.R., and J.L. Dwyer, 2010. An Overview of the Landsat DataContinuity Mission (LDCM) in Algorithms and Technologies forMultispectral, Hyperspectral, and Ultraspectral Imagery XVI(Proceedings Volume) (S.S. Shen and P.E. Lewis, editors),Proceedings of SPIE Volume: 7695, DOI: 10.1117/12.850416.
Hanson, C.L. 2001. Long-term precipitation database, ReynoldsCreek Experimental Watershed, Idaho, United States, WaterResources Research, 37:2831–2834.
Hanson, C.L., D. Marks, and S.S. Van Vactor, 2001. Long-termclimate database, Reynolds Creek Experimental Watershed,Idaho, United States, Water Resources Research, 37:2839–2841.
Harsanyi, J.C., 1993. Detection and Classification of SubpixelSpectral Signatures in Hyperspectral Image Sequences, Ph.D.Dissertation, University of Maryland, Baltimore County, 116 p.
Huang, C., G. Asner, R. Martin, N. Barger, and J. Neff, 2009.Multiscale analysis of tree cover and aboveground carbon stocksin pinyon-juniper woodlands, Ecological Applications,19:668–681.
Huang, C., G. Asner, R. Martin, N. Barger, J. Neff, and L. Floyd,2010. Regional aboveground live carbon losses due to drought-induced tree dieback in pinon-juniper ecosystems, RemoteSensing of Environment, 114:1471–1479.
Hudak, A.T., M.A. Lefsky, W.B. Cohen, and M. Berterretche. 2002.Integration of lidar and Landsat ETM data for estimating andmapping forest canopy height, Remote Sensing of Environment,82:397–416.
Hyde, P., R. Dubayah, W. Walker, B.J. Blair, M. Hofton, and C.Hunsaker, 2006. Mapping forest structure for wildlife habitatanalysis using multi-sensor (LiDAR, SAR/InSAR, ETM,QuickBird) synergy, Remote Sensing of Environment, 102:63–73.
Hyde, P., R. Nelson, D. Kimes, and E. Levine, 2007. ExploringLiDAR-RaDAR synergy- Predicting aboveground biomass in asouthwestern ponderosa pine forest using LiDAR, SAR andInSAR, Remote Sensing of Environment, 106:28–38.
Gauch, H.G., Jr., J.T.G. Hwang, and G.W. Fick, 2003. Modelevaluation by comparison of model-based predictions andmeasured values, Agronomy Journal, 95:1442–1446.
Glenn, N., J. Mundt, K. Weber, T. Prather, L. Lass, and J. Pettingill,2005. Hyperspectral data processing for repeat detection ofsmall infestations of leafy spurge, Remote Sensing of Environ-ment, 95:399–412.
Johnson, D., and R.F. Miller, 2006. Structure and development ofexpanding western juniper woodlands as influenced by twotopographic variables, Forest Ecology and Management, 229:7–15.
Kimes, D.S., K.J. Ranson, G. Sun, and J.B. Blair, 2006. Predictinglidar measured forest vertical structure from multi-anglespectral data, Remote Sensing of Environment, 100:503–511.
Lee, D.S., and j. Shan, 2003. Combining lidar elevation data andIKONOS multispectral imagery for coastal classificationmapping, Marine Geodesy, 26:117–127.
Miller, R.F., and J.A. Rose, 1999. Fire history and western juniperencroachment in sagebrush steppe, Journal of Range Manage-ment, 52:550–559.
Miller, R.F., T.J. Svejcar, and J.A. Rose, 2000. Impacts of westernjuniper on plant community composition and structure, Journalof Range Management, 53:574–585.
Mitchell, J., and N.F. Glenn, 2009a. Matched filtering subpixelabundance estimates in mixture-tuned matched filteringclassifications of leafy spurge (Euphorbia esula L.), InternationalJournal of Remote Sensing, 30:6099–6119.
Mitchell, J., and N.F. Glenn, 2009b. Leafy Spurge (Euphorbia esula L.)classification performance using hyperspectral and multispectralsensors, Rangeland Ecology and Management, 62:16–27.
Mundt, J.T., D.R. Streutker, and N.F. Glenn, 2006. Mapping sagebrushdistribution using fusion of hyperspectral and lidar classifications,Photogrammetric Engineering & Remote Sensing, 72(1):47–54.
Mutlu, M., S.C. Popescu, C. Stripling, and T. Spencer, 2008.Mapping surface fuel models using lidar and multispectraldata fusion for fire behavior, Remote Sensing of Environment,112:274–285.
Okin, G.S., D.A. Roberts, B. Murray, and W. Okin, 2001. Practicallimits on hyperspectral vegetation discrimination in arid andsemiarid environments, Remote Sensing of Environment,77:212–225.
Rango, A., M.J. Chopping, J.C. Ritchie, K. Havstad, W. Kustas, and T.Schmugge, 2000. Morphological characteristics of shrub coppicedunes in desert grasslands of southern New Mexico derived fromscanning LiDAR, Remote Sensing of Environment, 76:26–44.
Rencz, A.N. 1999. Remote Sensing for the Earth Sciences, Wiley andSons, New York. pp. 251–307.
PHOTOGRAMMETRIC ENGINEER ING & REMOTE SENS ING Decembe r 2011 7

Riano, D., E. Chuvieco, S.L. Ustin, J. Salas, J.R. Rodriguez-Perez,L.M. Ribeiro, D.X. Viegas, J.M. Moreno, and H. Fernandez,2007. Estimation of shrub height for fuel-type mappingcombining airborne LiDAR and simultaneous color infraredortho imaging, International Journal of Wildland Fire,16:341–348.
Ritchie, J.C., K.S. Humes, and M.A. Weltz, 1995. Laser altimetermeasurements at Walnut Gulch watershed, Arizona. Journal ofSoil and Water Conservation, 50:440–442.
Romme, W.H., C.A. Allen, J.D. Bailey, W.L. Baker, B.T.Bestelmeyer, P.M. Brown, K.S. Eisenhart, M.L. Floyd,D.W. Huffman, B.F. Jacobs, R.F. Miller, E.H. Muldavin,T.W. Swetnam, R.J. Tausch, and P.J. Weisberg, 2009.Historical and modern disturbance regimes, stand structures,and landscape dynamics in pinon-juniper vegetation of thewestern United States, Rangeland Ecology and Management,62:203–222.
Sankey, T.T., N. Glenn, S. Ehinger, A. Boehm, and S. Hardegree,2010. Characterizing western juniper expansion via a fusion ofLandsat-5 Thematic Mapper and lidar data, Rangeland Ecologyand Management, 63:514–523.
Sankey, T.T., 2009. Regional assessment of aspen change andspatial variability at decadal time scales, Remote Sensing,1:896–914.
Sankey, J.B., D.J. Brown, M.L. Bernard, and R. Lawrence, 2008.Comparing local vs. global visible and near-infrared (VisNIR)diffuse reflectance spectroscopy (DRS) calibrations for theprediction of soil clay, organic C and inorganic C, Geoderma,148:149–158.
Sankey, T.T., and M.J. Germino, 2008. Assessment of juniperencroachment with the use of satellite imagery and geospatialdata, Rangeland Ecology and Management, 61:412–418.
Seyfried, M.S., G.N. Flerchinger, M.D. Murdock, C.L. Hanson, andS. Van Vactor, 2001a. Long-term soil temperature database,Reynolds Creek Experimental Watershed, Idaho, United States,Water Resources Research, 37:2843–2846.
Seyfried, M.S., C.L. Hanson, M.D. Murdock, and S. Van Vactor,2001b. Long-term lysimeter database, Reynolds Creek Experi-mental Watershed, Idaho, United States, Water ResourcesResearch, 37:2853–2856.
Seyfried, M., R. Harris, D. Marks, and B. Jacob, 2001c. Geographicdatabase, Reynolds Creek Experimental Watershed, Idaho,United States, Water Resources Research, 37:2825–2829.
Seyfried, M.S., M.D. Murdock, C.L. Hanson, G.N. Flerchinger, andS. Van Vactor, 2001d. Long-term soil water content database,Reynolds Creek Experimental Watershed, Idaho, United States,Water Resources Research, 37:2847–2851.
Singh, N., and N. Glenn, 2009. Multitemporal spectral analysis forcheatgrass (Bromus tectorum) classification, InternationalJournal of Remote Sensing, 30:3441–3462.
Slaughter, C.W., D. Marks, G.N. Flerchinger, S.S. Van Vactor, andM. Burgess, 2001. Thirty-five years of research data collection atthe Reynolds Creek Experimental Watershed, Idaho, UnitedStates, Water Resources Research, 37:2819–2823.
Small, C., and J.W.T. Lu, 2006. Estimation and vicarious validationof urban vegetation abundance by spectral mixture analysis,Remote Sensing of Environment, 100:441–456.
Streutker, D.R., and N.F. Glenn, 2006. LiDAR measurement ofsagebrush steppe vegetation heights, Remote Sensing ofEnvironment, 102:135–145.
Su, J.G., and E.W. Bork, 2007. Characterization of diverse plantcommunities in Aspen Parkland rangeland using LiDAR data,Applied Vegetation Science, 10:407–416.
Tausch, R.J., N.E. West, and A.A. Nabi, 1981. Tree age and domi-nance patterns in Great Basin pinyon-juniper woodlands,Journal of Range Management, 34:259–264.
Weltz, M.A., J.C. Ritchie, and H.D. Fox, 1994. Comparison of laserand field measurements of vegetation height and canopy cover,Water Resources Research, 30:1311–1319.
Wulder, M.A., J.C. White, F. Alvarez, T. Han, J. Rogan, and B. Hawkes,2009. Characterizing boreal forest wildfire with multi-temporalLandsat and LIDAR data, Remote Sensing of Environment,113:1540–1555.
Xiao, J., and A. Moody, 2005. A comparison of methods for estimat-ing fractional green vegetation cover within a desert-to-uplandtransition zone in central New Mexico, USA, Remote Sensingof Environment, 98:237–250.
(Received 01 October 2010; accepted 30 January 2011; final version31 May 2011)
8 Decembe r 2011 PHOTOGRAMMETRIC ENGINEER ING & REMOTE SENS ING