Kinematic Differential Equationsakademik.thk.edu.tr/~nsengil/adw8.pdf · • If ω 1, ω 2, ω 3...
16
Kinematic Differential Equations Week-8 1 Electropaedia
Transcript of Kinematic Differential Equationsakademik.thk.edu.tr/~nsengil/adw8.pdf · • If ω 1, ω 2, ω 3...

Kinematic Differential Equations
Week-8
1Electropaedia

Attitude Kinematics
• In the previous sections, we developed several different ways to describe the attitude, or orientation, of one reference frame with respect to another, in terms of attitude variables.
• In this section, we treat kinematics in which the relativeorientation between two reference frames is time dependent.
• The time-dependent relationship between two referenceframes is described by so called kinematic differentialequations.
• In this section we derive the kinematic differential equationsfor the:– Direction cosine matrix,
– Euler angles, and
– Quaternions.
2

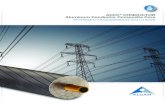
Direction Cosine Matrix• A and B are two reference frames
moving relative to each other.
• The angular velocity vector of reference frame B with respect toreference frame A is denoted by:
• Where the angular velocity vectorω is time dependent.
• We have defined the direction
cosine matrix (DCM)
332211
/
ˆˆˆ bbb
AB
ω
ωω
B/ACC
3
2
1
3
2
1
1
3
2
1
3
2
1
3
2
1
b
b
b
b
b
b
a
a
a
a
a
a
b
b
bT
CCC
3
a1
a3
a2
b1
b2
b3
ω1
ω3
ω2
A
B

• Because the two reference frames are rotating relative toeach other, the direction cosine matrix and its elements Cij
are functions of time.
• Taking the time derivative in A and denoting it by an overdot, we obtain:
Direction Cosine Matrix
3
2
1
12
13
23
3
2
1
3
2
1
3
2
1
3
2
1
3
2
1
0
0
0
0
0
0
0
0
0
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
TT
TTTT
CC
ω
ω
ω
CCCC
4

• Where
• By defining the skew-symmetric matrix:
333231
232221
131211
CCC
CCC
CCC
C
0
0
0
12
13
23
Ω
Direction Cosine Matrix
5

• We obtain:
• We obtain:
• Taking transpose of this equation and
0
0
0
3
2
1
b
b
bTT
ΩCC
0 ΩCCTT
ΩΩT
0 CΩC
Direction Cosine Matrix
6
CΩC

• Which is called the kinematic differential equations for the direction cosine matrix C.
• Differential equaitons for each element of C can be written as:
23113233
22112232
21111231
13333123
12332122
11331121
33223313
32222312
31221311
CCC
CCC
CCC
CCC
CCC
CCC
CCC
CCC
CCC
Direction Cosine Matrix
7
Derivation: dcm.m

8
• If ω1, ω2, ω3 are known as functions of time, then the orientation of B relative to A as a function of time can be determined by solving these kinematic differential equations.
• These equations can be solved using numerical techniques.
• Orthonormality condition is often used tocheck the accuracy of numerical integration.
• C CT=I
• Example 1: ex1.m
Direction Cosine Matrix

Euler Angles• Like the kinematic differential equation for the direction
cosine matrix C, the orientation of a reference frame B relative to a reference frame A can also be described byintroducing the time dependence of Euler angles.
• Consider the rotational sequence of 3(θ3)-2(θ2)-1(θ1) to Bfrom A. Derivation 1:
• The inverse relationship
9
3
2
1
211
211
2
3
2211211
1
3
2
1
coscossin0
cossincos0
sin01
0
0
)()(
0
0
)(
0
0
CCC
3
2
1
11
2121
21212
2
3
2
1
0
0cos
1
cs
cscc
scssc
ωSθ
θSω
1

• If ω1, ω2, ω3 are known as functions of time, and have initial conditions for the three Euler angles then the orientation of Brelative to A as a function of time can be determined by solving these kinematic differential equations.
• These equations can be solved using numerical techniques.
• However these calculations involve the computation of thetrigonometric functions of the angle.
• Singularites exist when θ2=π/2.
• Such a mathematical singularity problem can be avoided by selecting a different set of Euler angles.
10
Euler Angles

• Similarly for 3(Φ)-1(θ)-3(ψ) sequence:
11
Euler Angles
0
0
)()(
0
0)(0
0
133
3
2
1
CCC
3
2
1
0
0
sin
1
scccs
sssc
cs
Example 2: example2.mExample 3:example3.m

Rotation Vector Kinematics
• Desired kinematic equation for the rotation vector :
• Inverse is:
12
q
qυ 4
1cos2 q

Quaternions
13
4
3
2
1
4321
3412
2143
1234
3
2
1
2
0 q
q
q
q
qqqq
qqqq
qqqq
qqqq
4
3
2
1
321
312
213
123
4
3
2
1
0
0
0
0
2
1
q
q
q
q
q
q
q
q
Example 4:exeeuler_quat.m:
• In strapdown inertial reference system of aerospace vehicles, the body rates ω1, ω2, ω3 are measured by rate gyros that are «strapped down» to the vehicles.
• The kinematic differential equations is then integrated numerically using onboard flight computer to determine the orientation of the vehicles in terms of quaternions.
• Quaternions have no singularity as do Euler angles.
• Moreover, quaternions are well suited for onboard real-time computation because only products and no trigonometric relations exist in the kinematic differential equations.
• Thus, S/C orientation is now commonly described in terms of quatenions.
In short form:
qω
qωωq
T
2
1
2
1
4
4
q
q

Rodrigues Parameter Kinematics
• The kinematic equation satisfied by the Gibbs vector is most easily obtained from the kinematic equation for the quaternion.
• The inverse of this equation is:
14

Modified Rodrigues Parameter Kinematics
• The kinematic equation for the modified Rodrigues parameters can also be obtained from the kinematic equation for the quaternion.
• The inverse of the kinematic equation for the MRPs is:
15

CASE STUDY
• B frame 1(a(t))-2(b(t))-1(c(t)) rotates with
– w1=sin(t)*exp(-4*t);
– w2=sin(2*t)*exp(-4*t);
– w3=sin(3*t)*exp(-4*t);
• Relative to A inertial frame.
• If initial values are a(0)=1, b(0)=2, c(0)=3
• Calculate a(5), b(5), c(5)
16