Kim, Hyo Wan and Kenyon, Adam R. and Duraisamy ... · Hyo Won Kim ∗Adam R Kenyon Karthikeyan...
23
Kim, H.W. and Kenyon, A.R. and Duraisamy, K. and Brown, R.E. (2008) Interactional aerodynamics and acoustics of a propeller-augmented compound coaxial helicopter. In: 9th American Helicopter Society Aeromechanics Specialists' Meeting, 23-25 January 2008, San Francisco, California. http://strathprints.strath.ac.uk/27496/ Strathprints is designed to allow users to access the research output of the University of Strathclyde. Copyright © and Moral Rights for the papers on this site are retained by the individual authors and/or other copyright owners. You may not engage in further distribution of the material for any profitmaking activities or any commercial gain. You may freely distribute both the url (http://strathprints.strath.ac.uk ) and the content of this paper for research or study, educational, or not-for-profit purposes without prior permission or charge. You may freely distribute the url (http://strathprints.strath.ac.uk) of the Strathprints website. Any correspondence concerning this service should be sent to The Strathprints Administrator: [email protected]
Transcript of Kim, Hyo Wan and Kenyon, Adam R. and Duraisamy ... · Hyo Won Kim ∗Adam R Kenyon Karthikeyan...

Kim, H.W. and Kenyon, A.R. and Duraisamy, K. and Brown, R.E. (2008) Interactional aerodynamics and acoustics of a propeller-augmented compound coaxial helicopter. In: 9th American Helicopter Society Aeromechanics Specialists' Meeting, 23-25 January 2008, San Francisco, California.
http://strathprints.strath.ac.uk/27496/
Strathprints is designed to allow users to access the research output of the University of Strathclyde. Copyright © and Moral Rights for the papers on this site are retained by the individual authors and/or other copyright owners. You may not engage in further distribution of the material for any profitmaking activities or any commercial gain. You may freely distribute both the url (http://strathprints.strath.ac.uk) and the content of this paper for research or study, educational, or not-for-profit purposes without prior permission or charge. You may freely distribute the url (http://strathprints.strath.ac.uk) of the Strathprints website. Any correspondence concerning this service should be sent to The Strathprints Administrator: [email protected]

Interactional Aerodynamics and Acousticsof a
Propeller-Augmented Compound Coaxial Helicopter
Hyo Won Kim∗ Adam R Kenyon∗ Karthikeyan Duraisamy Richard E Brown
Postgraduate Research Students Lecturer Mechan Chair of Engineering
Department of Aeronautics Department of Aerospace Engineering
Imperial College London University of Glasgow
London SW7 2AZ Glasgow G12 8QQ
United Kingdom United Kingdom
Abstract
The aerodynamic and acoustic characteristics of a generic hingeless coaxial helicopter with a tail-mountedpropulsor and stabiliser have been simulated using Brown’s Vorticity Transport Model. This has been doneto investigate the ability of models of this type to capture the aerodynamic interactions that are generatedbetween the various components of realistic, complex helicopter configurations. Simulations reveal theaerodynamic environment of the coaxial main rotor of the configuration to be dominated by internalinteractions that lead to high vibration and noise. The wake of the main rotor is predicted to interactstrongly with the tailplane, particularly at low forward speed, to produce a strong nose-up pitching momentthat must be countered by significant longitudinal cyclic input to the main rotor. The wake from the mainrotor is ingested directly into the tail propulsor over a broad range of forward speeds, where it producessignificant vibratory excitation of the system as well as broadband noise. The numerical calculations alsosuggest the possibility that poor scheduling of the partition of the propulsive force between the main rotorand propulsor as a function of forward speed may yield a situation where the propulsor produces littlethrust but high vibration as a result of this interaction. Although many of the predicted effects might beameliorated or eliminated entirely by more careful or considered design, the model captures many of theaerodynamic interactions, and the resultant effects on the loading on the system, that might be expected tocharacterise the dynamics of such a vehicle. It is suggested that the use of such numerical techniques mighteventually allow the various aeromechanical problems that often beset new designs to be circumvented —hopefully well before they manifest on the prototype or production aircraft.
Notation
A matrix of influence coefficientsCB blade loading coefficientCD fuselage drag coefficientCF rotor force coefficientCM rotor moment coefficientCP rotor power coefficientCT rotor thrust coefficientCW helicopter weight coefficientF vector of overall forces and momentsK trim coupling matrixl fuselage half-lengthN number of fuselage panelsNb number of bladesR rotor radius
∗ Currently at the Department of Aerospace Engineer-ing, University of Glasgow as Visiting Researchers.
Presented at the American Helicopter Society Specialists’Conference on Aeromechanics, San Francisco, CA, 23–25January 2008. Copyright c© 2006 by the American Heli-copter Society International, Inc. All rights reserved.
U∞ freestream velocityu local velocityw wake-induced velocityαs rotor shaft tiltΓ matrix of vortex loop strengthsθ array of control inputsθ0 collective pitch angleθ1s sine cyclic pitch angleθ1c cosine cyclic pitch angleµ advance ratioψ blade azimuthΩ rotor rotational speed
subscripts/superscripts:
c coaxial systeml lower rotor of coaxial systemu upper rotor of coaxial systemt propulsorx, y, z orthogonal Cartesian components∗ trim target
1

Introduction
Helicopters that use a twin counter-rotating coax-ial main rotor system have been under intermit-tent development since the early days of rotary-winged flight and several such machines have seenlong and successful service (Ref. 1). Recent designstudies have re-visited the coaxial configuration asone potential solution to future requirements foran efficient heavy-lift machine that is also capa-ble of much higher forward flight speeds than con-ventional rotary-winged vehicles have traditionallybeen able to achieve.
Most helicopters rely on forward tilt of the rotorto produce the force required to propel the systemthrough the air. With a conventional rotor systemwith low flapwise stiffness, the maximum perfor-mance of the system is often limited by the veryhigh lift coefficients that are required at high ad-vance ratio on the retreating side of the rotor discin order to overcome the natural tendency of the ro-tor to flap backwards instead. The same is broadlytrue of a conventionally-articulated coaxial rotor.The situation alters dramatically though if signifi-cant flapwise stiffness is introduced into the system.The altered phase relationship between blade flap-ping and the applied aerodynamic load means thatthe rotor’s natural tendency in forward flight is nolonger to flap backwards but instead to produce arolling moment about the rotor hub. In a coax-ial system, the contributions to the rolling momentfrom the two contra-rotating rotors can be madeto cancel, allowing the retreating sides of the ro-tors to be flown at a much lower average lift coeffi-cient than with a conventional rotor. The premiseis that such rotors can thus be flown to much higheradvance ratios than conventional single main rotordesigns before the aerodynamics of the retreatingblades pose a serious limit to the performance of thesystem. This is the basis of the Advancing BladeConcept (ABC) rotor developed by Sikorsky in the1970s. The history of the development of this sys-tem as part of the XH-59A prototype helicopter isdocumented comprehensively by Burgess in Ref. 2.
The equivalent argument in terms of speed ratherthan advance ratio is weakened somewhat by thefact that compressibility on the advancing side ofthe rotor at high forward speed poses as great animpediment to the performance of a stiffened coax-ial rotor as it does to a conventional system. Thisis particularly so if the rotors are highly loaded, forinstance through being required to produce a sig-nificant proportion of the propulsive force requiredby the aircraft. Wings or an auxiliary propulsionsystem can be added to the aircraft, to yield a lift-or thrust-compounded configuration (possibly, ason the XH-59A, in conjunction with a variable-speed rotor), reducing the load on the main rotor
and thus ameliorating the effects of compressibilityon the performance of the vehicle at high forwardspeed. For this reason, the thrust compounded,stiffened coaxial rotor is considered to be a verystrong contender to form the basis of a new gen-eration of heavy-lift, high-speed rotorcraft. TheXH-59A itself used a pair of turbojets to augmentthe thrust produced by the main rotor, but despitethe considerable effort that was put into testingscaled models and prototype aircraft, this designdid not reach production. The concept has beenrevived more recently though in the developmentof Sikorsky’s X2 technology demonstrator. Thishelicopter is likely to adopt a tail-mounted pusherpropeller to augment the propulsive force that isprovided by its ABC-type coaxial rotor.
This particular configuration, although showingsignificant promise as a viable technological solu-tion to operational requirements for increased he-licopter forward speed, manoeuvrability and load-carrying ability, is inherently very complex froman aerodynamic point of view. Under certain flightconditions, the performance and flight mechanics ofsuch a configuration are likely to be influenced verystrongly by aerodynamic interactions between thevarious components of the helicopter. In order tomaximise the efficiency and potential of this typeof aircraft, a thorough understanding of the natureand form of the aerodynamic interactions that oc-cur within the system, as well as an appreciation ofthe flight conditions under which such interactionsmight pose the greatest challenges to the operationand control of the vehicle, is essential (Ref. 3).
The system that is analysed in this paper hasa stiff coaxial rotor system, mounted above a com-pact but streamlined fuselage, together with a rear-mounted pusher propeller to augment the thrustof the main rotor. Instead of focusing on theproperties of any specific, real vehicle, the con-figuration that is analysed in this paper is en-tirely fictitious. Various pertinent characteristics ofthe thrust-compounded coaxial configuration havebeen synthesised to obtain a generic representa-tion of this class of helicopters, in the hope thatpredictions of the aerodynamic environment of thegeneric configuration might shed some light on thebehaviour of this class of helicopters as a whole.Nevertheless, many of the properties of the vari-ous components of the generic system have beensimplified considerably from those of any real de-sign, and it should be borne in mind that it ishighly likely that most of the various aerodynamicpathologies that appear to be attributed to thisconfiguration by this study could be amelioratedfairly easily through sensible engineering design orsimple geometric modification.
For many years, the aim of the developers ofcomputational tools for the analysis of rotorcraft
2

has been to develop a method that can be usedvery early in the design process to inform the de-signers of such aircraft of the potential aerody-namic problems that might arise from injudiciousjuxtaposition of the various elements of their pro-posed configuration. The ideal has always been forthis information to become available to the design-ers well before any such problems might manifeston the prototype or production vehicle (Ref. 4).Unfortunately, the historical record shows past ef-forts in this regard to have met with limited suc-cess (Refs. 5–10).
The aim of this paper is thus to demonstratesome progress in the computational modelling ofhelicopter interactional aerodynamics, and to sug-gest perhaps that the state of the art of compu-tational helicopter aerodynamic predictions is ad-vancing to a stage where some insight into thedetailed features of aerodynamic interactions in asystem as aerodynamically complex as a propeller-augmented hingeless coaxial helicopter can be ob-tained. To this end, computational predictionsof the aerodynamics and acoustics of the genericthrust-compounded coaxial helicopter are com-pared and contrasted at various forward flightspeeds.
Computational Model
The aerodynamic behaviour of a generic, thrust-compounded coaxial helicopter has been simulatedusing the Vorticity Transport Model (VTM), devel-oped by Brown (Ref. 11) and extended by Brownand Line (Ref. 12). A full description of the modelis contained within the original references; for thesake of brevity only the basic characteristics of themodel are summarised here.
The VTM solves the vorticity-velocity form ofthe Navier-Stokes equations on a Cartesian gridsurrounding the rotorcraft. Significant savings inmemory and computational time are achieved byallowing the distribution of cells within the com-putational domain to track the vorticity field as itevolves. This is done by creating computationalcells in regions of the flow where vorticity existsand subsequently destroying them once the vortic-ity migrates elsewhere. Computational efficiencyis enhanced further by using a sequence of nestedgrids in which the cells within the outer grids arearranged to be coarser than those closer to therotor. This reduces the overall cell count whilstallowing a highly resolved flow field to be main-tained near the rotor. The convection algorithmimplemented in the VTM is particularly effectivein controlling the local rate of dissipation of thevorticity, allowing the integrity of vortical struc-tures in the rotor wake to be preserved for manyrotor revolutions. The VTM is thus particularly
well suited to resolving the wake-induced interac-tions between geometrically well-separated compo-nents of the aircraft. In the context of the presentpaper, this property of the model enables the long-range aerodynamic interactions between the twinmain rotors, the tail propulsor and the horizontalstabiliser of the propeller-augmented coaxial heli-copter to be studied in detail.
In the version of the VTM used to generate theresults presented in this paper, the blade aero-dynamics are modelled using an extension of theWeissinger-L version of lifting line theory. In thisapproach, the two-dimensional aerodynamic char-acteristics of the rotor blade sections are specifiedin a look-up table as a function of angle of attackand Mach number for a given Reynolds number.These characteristics are then enforced by apply-ing a modified zero through-flow condition on a setof aerodynamic stations along the length of eachblade. Even though blade stall can be modelled us-ing this technique, the approach is still essentiallyinviscid. The profile drag of the blade is thus calcu-lated as a separate function of local angle of attackand then added to the local aerodynamic force thatis calculated from the lifting line model.
To model the presence of a fuselage, the fuselagesurface is discretised into a system of N quadri-lateral panels. Each panel edge is represented asa vortex filament of constant strength Γi, with thefilaments on each panel i thus forming a closed loopof vorticity. The velocity at any panel centroid isthen given by the sum of the influences from all vor-tex filaments on the body together with the veloc-ity w that is induced by any other vorticity withinthe flow and the freestream component of velocity,U∞. A boundary condition of zero through-flowis enforced simultaneously at the centroids of allpanels, so that
(U∞ + w)i · ni +N∑
j=1
AijΓj = 0 (1)
where ni is the unit vector normal to panel i.This linear equation is solved at each computa-tional timestep to obtain the matrix of vortex loopstrengths, Γ. The influence matrix, A, accountsfor the velocity induced on each panel by everyother panel, and is thus of size N by N . The factthat the fuselage is closed provides an additional,but implicit, constraint on the relationship betweenthe panel strengths, by requiring that they shouldsum to zero, that results in A being singular. Inthe VTM, the vortex loop strengths are thus eval-uated using an approximation to the inverse of Athat is obtained using Singular Value Decomposi-tion. A considerable saving in computational effortis achieved by assuming the fuselage to be rigid.This is because the matrix of influence coefficients
3

does not then change with time, allowing the inver-sion of A to be performed prior to the simulation.
The pressure on the fuselage surface is calculatedfrom the unsteady Bernoulli equation,
p− p∞12ρ
= U2∞− | u |2 −2
∂φ
∂t(2)
In the VTM, the change in panel strengths withtime as well as the disturbance to the velocity po-tential due to the convection of vortices within thewake are accounted for when evaluating the un-steady potential term ∂φ/∂t. Similarly, the contri-bution from all the vorticity in the computationaldomain, as well as a near-field correction term thataccounts for the self-influence of the vorticity oneach panel by assuming it to be distributed as anequivalent vortex sheet, is accounted for when eval-uating the velocity u on the surface of the fuselage.
Lift generation by the fuselage is modelled in theVTM by applying the Kutta condition along pre-specified separation lines on the surface of the fuse-lage. The Kutta condition is satisfied by ensuringthat the net circulation around the separation lineis zero, and this is enforced in the VTM by re-leasing into the wake an amount of vorticity thatis equal in strength to the difference between thestrengths of the panels on either side of the sepa-ration line. The vorticity that is created as a con-sequence of the generation of lift is sourced intothe VTM grid, where it feeds back into the loadingproduced on the system. The circulatory contribu-tion to the unsteady aerodynamic characteristicsof any lifting surface in the flow is thus fully repre-sented. Note though that the viscous wake of thenon-lifting components of the configuration is notaccounted for at present.
Elements of this model have been used be-fore to investigate the aerodynamic interactionsexperienced by a generic helicopter configura-tion (Ref. 13), and the procedure described abovehas been shown to produce very good agreementwith experimental results for the mean and time-dependent variation of inflow through the rotor,the position of the vortices within the rotor wakeas they approach the surface of the fuselage, andboth the mean and time-variation of the pressurefields that are induced on the surface of the fuse-lage by these vortical structures. The model hasalso been used to investigate the aerodynamic be-haviour of isolated coaxial rotors (Ref. 14) and hasbeen shown to capture accurately the performanceof such systems. These previous studies providesome confidence that the model is able to capturethose features of the aerodynamic environment ofthe vehicle that are of most relevance to the presentstudy.
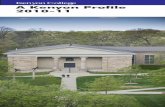
Figure 1: Generic thrust-compounded hingeless coaxialconfiguration.
Description of SimulatedConfiguration
This paper analyses the aerodynamic interactionbetween the components of a generic helicopterconfiguration that comprises a stiffened twin coax-ial rotor system together with an auxiliary tailpropeller, or ‘propulsor,’ to augment the propul-sive thrust that is produced by the main rotorsystem (see Figure 1). Each of the componentsof this configuration is described in detail below.Although the inspiration for much of the geome-try of the configuration is derived from helicopterssuch as the XH-59A and X2, it should be bornein mind throughout that significant simplificationshave been introduced in many instances in order toallow the results presented in this paper to repre-sent more straightforwardly the generic characteris-tics of such a configuration rather than the specificsof any one particular aircraft.
Rotor System
The main rotor system modelled in this study fol-lows closely that of the XH-59A’s ABC rotor interms of its geometry. Two counter-rotating, three-bladed rotors are separated axially by a distanceof 0.139R. The blades of both rotors are taperedlinearly in planform and have −10 of non-lineartwist. For simplicity, however, a constant airfoilsection, NACA 23012, is used along the entire spanof the rotor blades. While the use of constant bladesections yields a rather crude representation of thesophisticated design of real ABC-type rotor blades,the resulting wake structure, and hence the aerody-namic interference between the main rotor systemand the other lifting devices in the configuration,should nevertheless be sufficiently representative ofa realistic full-scale vehicle of this type. The geo-metric properties of the main rotor system are sum-marised in Table 1.
In all simulations presented in this paper, theflapwise stiffness of ABC-type rotors is approx-imated by assuming the rotor blades and their
4

Table 1: Main rotor and propulsor geometries
Main Rotor Propulsor
Rotor radius R (5.5m) Rt (0.28R)Number of rotors 2 1Blades per rotor 3 5Rotor separation 0.139R –Root cutout 0.12R 0.20Rt
Solidity 0.127 0.222Twist −10.0 −30.0
Chord Tapered (2:1) 0.18Rt
Airfoil sections NACA 23012 NACA 0012
attachments to the rotor hub to be completelyrigid. Although this simplification may appear tobe rather crude, and of course the flap-lag dynam-ics of the blades is suppressed entirely using thisapproach, the loading on the rotors and the re-sultant wake geometry of such a system has beenshown to be very similar (Ref. 15) to that of ro-tors with the high level of flapwise stiffness that ischaracteristic of the coaxial rotors of ABC-type sys-tems (Refs. 16, 17). Thus, as far as the effects ofaerodynamic interference are concerned, the sim-plified rigid rotor model is expected to provide avery close representation of the aerodynamic envi-ronment that is generated by practical semi-rigidcoaxial rotor systems.
The twin rotors of the coaxial system are ar-ranged so that the upper rotor rotates anticlock-wise and the lower rotor rotates clockwise whenviewed from above. The rotors have been arrangedto overlap when blades from both the upper andthe lower rotors pass directly over the centreline ofthe rear fuselage. For simplicity, the hub of the ro-tor is not modelled in the simulations, but it shouldbe realised that the omission of this feature of thesystem will have some effect on the physical plau-sibility of the predicted structure of the wake im-mediately downstream of the rotor shaft.
Auxiliary Propulsor
A five-bladed propeller is used to represent an aux-iliary thrust-producing device mounted in pusherconfiguration to the rear of the fuselage. The bladesof this propulsor feature a tapered root end, −30
of linear twist, and a NACA 0012 sectional profile.The propulsor is mounted so that its rotational axisis aligned with the longitudinal axis of the aircraft.Its rotational speed is fixed at 4.25 times the mainrotor speed and its direction of rotation is clockwisewhen seen from the rear of the aircraft.
The pitch angle of all the blades of the propul-sor is adjusted simultaneously to produce the de-sired level of thrust in much the same manner asthe collective pitch control affects the feathering ofthe blades of the main rotors. The blades of the
Table 2: Fuselage geometry
Fuselage length (2l) 2.04RTailplane :
Airfoil section NACA 0012Span 0.667lChord 0.167l
Hub x,y,z coordinates:Main rotor (lower) 0.765l, 0.000l, 0.386lMain rotor (upper) 0.765l, 0.000l, 0.522lPropulsor 2.079l, 0.000l, 0.111l
(relative to fuselage nose)
propulsor and their attachments to their hub areotherwise assumed to be rigid. Note that, as withthe main rotor system, the hub of the rotor itself isnot modelled. A summary of the geometry of thepropulsor is given in Table 1.
Fuselage Geometry
The modelled configuration includes a fuselage asshown in Fig. 1. The geometry of the fuselage isentirely fictitious but was selected to be representa-tive of the compact but streamlined configurationof modern high-performance helicopters. The fuse-lage features a large horizontal tail surface to allowthe effects of aerodynamic interactions that mightarise as a consequence of the rotorcraft featuringa lifting empennage arrangement to appear in thesimulations. Indeed, the aerodynamic interactionbetween the wake from the main rotor and the em-pennage has been documented as being responsiblefor a number of unexpected flight mechanic issuesin modern helicopters (e.g. Refs. 8–10). The tailsurface is untwisted and has a rectangular plan-form, and the Kutta condition is satisfied along itsentire trailing edge. This allows it to act as a lift-ing surface and to produce a representative wakestructure. Other relevant properties of the fuselageare summarised in Table 2.
Trim Methodology
The trim algorithm implemented in the VTMdrives the rotor controls so that their rates ofchange are proportional to the difference betweenthe current values and the prescribed target val-ues of the components of an array of forces andmoments that represent the overall loads on thevehicle. Given the xyz-coordinate system shown inFig. 2, the array
F = [ CFx, CFy, CFz, CMx, CMy, CMz ] (3)
contains the Cartesian components of the overallforces and moments that are applied by the rotorsystem to some suitable reference point on the air-frame. For present purposes the system is assumed
5

CFx
CFy
CFz
CMy
CMz
Direction of flight
z
x
y
x
Figure 2: Schematic showing the axis convention forforces and moments.
to be in trim when there is zero net moment aboutthe base of the main rotor mast and simultaneouslythe propulsive force matches the drag on the vehi-cle and the weight of the aircraft is balanced by thevertical component of the force produced by the ro-tors. This trim state is imposed on the system bydefining the array
F ∗ = [−CD, 0, CW , 0, 0, 0] (4)
of prescribed target loads on the vehicle. Givencontrol inputs θu = [θu
0 , θu1s, θ
u1c] and θl =[
θl0, θ
l1s, θ
l1c
]to the upper and lower rotors respec-
tively, and θt = [θt0] to the propulsor, the trim al-
gorithm used in the VTM can be written as[
θu(t), θl(t), θt(t)]
= K (F ∗ − F (t)) (5)
where K is a 7×6 coupling matrix that prescribesthe rate at which each of the controls should re-spond to any discrepancy between F ∗ and F . Thissimple first-order dynamical system serves essen-tially as a simplistic pilot model that adjusts thecontrols continuously during a simulation to drivethe loads on the system towards their prescribedvalues. The dynamic nature of this approach re-quires the system to be considered to be in trimonly when F = F ∗, where F is the long-term aver-age of F (t), but no further assumptions regardingthe frequency content of the loading on the sys-tem are required to establish a steady-state oper-ating condition. The approach is thus ideal for theanalysis of flight cases where aerodynamic interac-tions between the various components of the systemmight not necessarily result in periodic long-termbehaviour of the loads on the vehicle. A more de-tailed account of the trim model is contained inRef. 15.
In all simulations presented in this paper, thecollective pitch inputs to both upper and lower ro-tors are varied together to alter the total thrustproduced by the system while differential collec-tive pitch input to the upper and lower rotors is
Table 3: Simulated flight conditions and correspondingtrim targets.
Speed Weight Drag Shaft tiltµ CW CD αs
0.05 0.012 0.00008 0
0.10 0.012 0.00032 0
0.15 0.012 0.00072 4
0.30 0.012 0.00288 4
used to maintain zero net yawing moment on thesystem. The XH-59A employed differential cyclicpitch input to optimise the performance of the ro-tor (Refs. 2, 17–19), but in the present analysis thiscomplication is avoided and the same cyclic pitchinputs are applied simultaneously to both upperand lower rotors to generate the required rollingand pitching moments on the system.
The rigidity of the main rotor system limits theability of the cyclic pitch controls to tilt the tippath plane relative to the rotor shaft in order toproduce a propulsive thrust component to the sys-tem, but the high control power of the stiffened sys-tem allows very direct control of the pitch attitudeof the aircraft and hence the shaft tilt with respectto the flightpath. The balance of propulsive forcebetween the main rotor system and propulsor thatis required to maintain a given forward flight speedis thus largely controlled by the pitch moment thatis demanded from the main rotor system. Rep-resentation of this characteristic of the helicopterneeds to be approached with some care since therigid-body dynamics of the fuselage is not modelleddirectly. The approach taken was to assume that,at very low forward speed, just sufficient pitchingmoment is demanded from the main rotor to main-tain its shaft perpendicular to the flightpath, but,beyond an advance ratio of 0.10, additional pitch-ing moment is demanded from the main rotor toforce its shaft to incline 4 forward, thereby allow-ing the main rotor to contribute partially to theforward thrust that is required to maintain the for-ward speed of the helicopter. Any deficit in thepropulsive force that is generated by the main rotoris then provided by the tail propulsor by suitablevariation of its own collective pitch.
The required propulsive force is calculated byassuming the parasite drag of the system to berepresented by an equivalent flat plate (Ref. 20)with 1/25th of the main rotor disc area. Thisyields a quadratic variation of the required propul-sive force with forward speed that is comparable,in non-dimensional terms, to that of the XH-59A(Ref. 21). The weight of the aircraft was assumedto be balanced throughout by a vertical compo-nent to the thrust coefficient that is produced bythe system of 0.012, this again being representativeof an aircraft of the size of the XH-59A. The range
6

-0.004 -0.003 -0.002 -0.001 0 0.001
0.05
0.10
0.15
0.20
0.25
0.30
0.35A
dva
nce
Ra
tio
,ì
Force Coefficient, CFx
Propulsive Drag
Coaxial Main Rotor
Propulsor
Total
Trim Target
Figure 3: Partition of the propulsive force betweenthe main rotor and propulsor as a function of forwardspeed.
of forward speeds for which calculations were per-formed, and the corresponding trim targets for thesimulations are summarised in Table 3.
Aircraft Performance
Figure 3 shows the variation with forward flightspeed of the propulsive force that is required toovercome the drag of the aircraft given the modeldescribed above. At low forward speed, the ab-sence of any forward tilt of the main rotor causesit to generate an in-plane component of force thathas to be counteracted by the propulsor in order toproduce the requisite propulsive force on the con-figuration. This is certainly non-optimal and re-sults in a higher consumption of power at low for-ward speed than is necessary, as is shown in Fig. 4where the overall power consumption of the systemis plotted as a function of advance ratio. It is likelythough that this flaw could be corrected through amore refined scheduling of the shaft tilt with for-ward speed than that adopted here. Indeed, theforward tilt of the rotor shaft that is scheduled atadvance ratios greater than 0.10 allows the mainrotor to contribute to the propulsive force that isrequired to overcome the drag of the system, andtranslates into a marked reduction in the powerthat is consumed by the main rotor at higher for-ward speed, as shown in Fig. 4. This observationneeds to be placed in context, though. By parti-tioning the power consumption into the individualcontributions from the main rotor and propulsor,Fig. 4 also reveals that, although the power con-sumed by the main rotor can be reduced quite con-siderably by unloading the system in favour of thepropulsor, this advantage can be outweighed by thepower requirements of the propulsor itself at highforward flight speeds.
Finally, Fig. 5 shows the partition of the pitchingmoment into the individual contributions that aregenerated by the main rotor system, the propulsor
0
0.4
0.8
1.2
0.05 0.10 0.15 0.20 0.25 0.30
Advance Ratio, ì
Po
we
rC
oe
ffic
ien
t,C
P
Total
Coaxial Main Rotor
Propulsor
x 10-3
Figure 4: Partition between the main rotor and propul-sor of the power required by the vehicle as a function offorward speed.
-0.0016
-0.0012
-0.0008
-0.0004
0
0.0004
0.0008
0.0012
0.0016
0.05 0.10 0.15 0.20 0.25 0.30
Advance Ratio, ì
Pitch
ing
Mo
me
nt,
CM
y
Main Rotor
- Upper Rotor
- Lower Rotor
Propulsor
Tailplane
Trim Line
Nose-up
Pitching
Moment
Figure 5: Partition between the main rotor, propulsorand tailplane of the pitching moment required to trimthe vehicle as a function of forward speed.
and the horizontal tailplane in order to maintainthe aircaft in trim at the various forward speedsthat were simulated. The origin of the very largecontribution to the overall pitching moment fromthe tailplane, particularly at low forward speeds,will be discussed later in this paper. The contri-bution of the tailplane translates into a significantvariation with forward speed in the pitching mo-ment that must be commanded by cyclic input intothe main rotor system in order to maintain over-all zero pitching moment on the configuration andhence the aircraft in trim. The requirement on themain rotor to produce this moment will be shownshortly to result in a significant elevation in theloading on the rear of both the upper and lowerrotors of the coaxial system, particularly at lowforward speed, that has interesting consequencesparticularly for the vibration and the acoustic ra-diation that is produced by the configuration.
7

(a) µ = 0.05
(b) µ = 0.10
(c) µ = 0.15
(d) µ = 0.30
Figure 6: Visualisation of the wake structure of the full configuration in steady forward flight at various advanceratios. Wakes from the different elements of the configuration coloured in separate shades of grey. (Left: top view.Right: bottom view.)
8

Wake Structure
Figure 6 shows a series of snapshots of the structureof the wake that is generated by the helicopter ateach of the advance ratios that was simulated. Ineach plot, a set of iso-surfaces is presented on whichthe vorticity in the flow around the vehicle has con-stant magnitude. The wakes that are generated byeach of the main rotors, the tail propulsor and thehorizontal tail surface are coloured separately invarious shades of grey. To aid in the interpretationof these figures, Fig. 7 reveals the relative extent ofthe wake envelope that is associated with each ro-tor by plotting the trajectories of their tip vorticesas they intersect the plane of lateral symmetry ofthe fuselage.
Figures 6(a) and 7(a) show the wake of the he-licopter when operating at an advance ratio µ =0.05. At this forward speed, the wake of the mainrotor system is in a transitional state between thecylindrical, hover-like form that it would adopt atlower advance ratios and the flattened, aeroplane-like form that is characteristic of the system athigher advance ratios. The precursors of the rolledup super-vortices that form at the sides of the wakeat higher advance ratios are clearly evident, but atthis forward speed these structures are highly un-steady and their formation is continually disruptedby the destabilising effect of the mutual interactionbetween the individual tip vortices that constitutethe underlying helicoidal structure of the wakes ofthe rotors. This results in significant disorder in thewake a fairly short distance downstream of the tailas the products of this instability interact to formprogressively smaller coherent structures. The viewfrom below shows the very strong influence of thefuselage in displacing the wake of the main rotors,to the extent that a powerful bow-shaped vortexforms as a result of the retardation and conflu-ence of several tip vortices near a stagnation pointon the upper surface of the forward fuselage. Thearms of this vortex trail down the sides of the fuse-lage and interact with the developing super-vorticeson both sides of the aircraft. Figure 8 shows thewake from the rear of the main rotors to impinge onthe fuselage just slightly forward of the tailplane.The marked downwards trajectory of the wake fromthe main rotor results in very little direct interac-tion between the main rotor and the propulsor; al-though some vorticity is indeed ingested into thebottom of the propulsor disc, and some also rollsbackwards along the top surface of the fuselage tointeract with the tailplane, most of the vorticitycreated by the main rotors can be seen to pass be-low the propulsor at this forward speed. The veryobvious skewing of the wake seen in Figure 9 of thepropulsor to the port side of the aircraft suggestsa powerful indirect interaction between the main
rotor system and the propulsor, although part ofthis effect might be due to the almost complete en-trainment of the wake of the tailplane through thepropulsor disc at this forward flight speed.
Upper RotorLower RotorTail Propeller
(a) µ = 0.05
(b) µ = 0.10
(c) µ = 0.15
(d) µ = 0.30
Figure 7: Trajectories of the tip vortices of the mainrotors and propulsor. (Each plot is a composite show-ing the points of intersection of individual vortices withthe longitudinal plane through the fuselage centreline atvarious times during a single main rotor revolution.)
Figures 6(b) and 7(b) show the wake of the heli-copter when operating at a slightly higher advanceratio (µ = 0.10). At this forward speed, the indi-vidual tip vortices from the blades of the main ro-tors interleave and co-orbit to form a pair of highly-structured super-vortices along both sides of thewake. As at the lower flight speed, the wake fromthe tailplane is again entrained almost completelyinto the propulsor; the presence of the two power-ful, counter-rotating vortices from the tips of thetailplane at this forward flight speed results in sig-nificant flattening of the wake tube of the propulsora short distance downstream of the aircraft. Theindirect interaction between the propulsor and the
9

Figure 8: Visualisation of the wake structure of theconfiguration, showing the distortion of the tip vor-tices around the fuselage and tailplane at advance ratioµ = 0.05.
main rotor results in a strong modulation of thevorticity in the wake tube of the propulsor to forma series of toroidal structures that have a char-acteristic wavelength that is very similar to thespacing between the individual tip vortices fromthe main rotor system. This modulation is mostlikely enhanced by the rather obvious and very di-rect impingement of tip vortices from the main ro-tor system on the tail of the configuration at thisflight speed. Indeed, Fig. 10(a) shows a successionof tip vortices from the main rotor to pass veryclosely over the upper surface of the tailplane, sub-sequently to be ingested directly into the upper halfof the propulsor (see Fig. 10(b)). The effect of thispowerful interaction between the main rotor andthe tail of the configuration on the loading on thehelicopter is discussed in the next section of thispaper.
Figures 6(c) and 7(c) show the wake of the sys-tem when flying through the air at advance ratioµ = 0.15. At slower flight speeds the root vor-tex system that is generated by the main rotorsis helicoidal in structure and is only moderatelyskewed. Interaction of this vortex system with theother components of the configuration is thus gen-erally limited to a direct impingement on the fuse-lage, well forward of the tailplane (as shown in Fig-ure 10), in such a way that the individual vorticesencounter the fuselage at such a steep angle thatthey do not tend to propagate far along the lengthof the body before being swept away into the flowbelow the helicopter. At low forward flight speedthe root vortex system thus does not tend to in-teract with the tailplane. Figure 11(a) shows theroot vortex system that is generated by the main
Figure 9: Visualisation of the wake structure of the con-figuration: view from above at advance ratio µ = 0.05showing the incipient formation of super-vortices inthe wake of the main rotor and the interaction-inducedskewing of the propulsor wake.
rotors at higher advance ratio to roll up into a pairof concentrated structures that trail down the sidesof the fuselage. At µ = 0.15 these structures are bi-ased strongly towards the port side of the fuselage.As shown in Fig. 11(b), the port-side vortex in-teracts very strongly with the tailplane, producinga corkscrew-like perturbation to the trailing vor-tex that is produced by the port side of this sur-face. Further downstream, the root vortex struc-ture causes significant disruption to the structureof the wake tube of the propulsor, forcing it to rollup along its port edge and to skew to such an extentthat the trailing vortex from the starboard tip ofthe tailplane is no longer entrained into the wake ofthe propulsor but instead is able to convect withoutsignificant interference into the flow downstream ofthe helicopter (see Fig. 6(c)).
As the advance ratio of the system is increased,the effect of the main rotor wake in modulating thestructure of the wake produced by the propulsorsteadily decreases, to the extent that at the high-est advance ratio that was simulated (µ = 0.30)this effect is almost entirely absent, as can be in-ferred from the very orderly, helical structure of thewake produced by the propulsor that is shown inFig. 6(d). Similarly, the amount of vorticity fromthe main rotor system that is entrained directlythrough the propulsor disc decreases significantlyas the rearwards skew of the wake of the main ro-tor increases with forward speed of the aircraft.This can be seen by comparing Fig. 11(a), whichshows a significant proportion of the vorticity thatis produced from the tips of the main rotor to beentrained into the upper half of the propulsor at
10

(a) Close-passage and impingement of the tip vortices fromthe main rotors on the upper surface of the tailplane.(Tailplane wake not visualised for clarity.)
(b) Ingestion of the main rotor vortices through the propul-sor showing subsequent distortion due to interaction withpropulsor and tailplane wake.
Figure 10: Visualisation of the wake structure of the configuration, showing the distortion of the flow around thetail at advance ratio µ = 0.10. (Propulsor wake not visualised for clarity.)
(a) View showing the formation of a concentrated root vortexstructure from the main rotor and its subsequent impinge-ment on the tailplane.
(b) View showing the distortion of the tailplane wake underthe influence of the main rotor root vortices and the propul-sor.
Figure 11: Visualisation of the wake structure of theconfiguration, showing the distortion of the flow aroundthe tail at advance ratio µ = 0.15. View from below theport side of the aircraft. (Propulsor wake not visualisedfor clarity.)
an advance ratio of 0.15 (see also Fig. 7(c)), withFig. 12 which shows minimal such entrainment atan advance ratio of 0.30 (see also Fig. 7(d)).
Interactional Aerodynamics
It is thus possible to conceive of two rather differ-ent modes of aerodynamic interaction taking placewithin the system (Ref. 22). The first, rather obvi-ous ‘direct’ mode involves the direct impingementof the wake of one of the components of the systemon the other, and thus a direct and strong modifica-tion of the aerodynamic environment experiencedby the affected component and hence its loading.The second ‘indirect’ mode, where interaction be-tween the wakes of the two components — perhapseven at quite some distance from the componentsthemselves — modifies the geometry of both wakes,and thus feeds back into the aerodynamic environ-ment of the system and hence its loading in a farmore subtle way than in the first case, is clearlyevident in some of the images presented in Fig. 6.This section of the paper examines in more detailthe effects of these aerodynamic interactions on theloads produced within the system.
Rotor-Rotor Interaction
Figure 13 shows the distribution of inflow that isexperienced by the upper and lower rotors of thecoaxial system at each advance ratio that was sim-ulated. Each individual plot shows the radial dis-tribution of inflow that is experienced by a singleblade, during a single rotor revolution, as a polar
11

(a) View from below the aircraft. (Tailplane wake not visu-alised for clarity.)
(b) View from below the port side of the aircraft.
Figure 12: Visualisation of the wake structure of theconfiguration, showing the close passage of the root vor-tex from the lower rotor over the empennage at advanceratio µ = 0.30. (Propulsor wake not visualised for clar-ity.)
function of blade azimuth. The higher the inflow,the darker the shading of the plot. At all advanceratios, the aerodynamic environment of the lowerrotor is strongly modified by interaction with thewake of the upper rotor, whereas the influence ofthe lower rotor on the upper is far less marked. Aseries of sharp ridges in the inflow disribution onthe upper rotor is induced by the close passage ofthe tip vortices that trail from the blades of thesame rotor; similar features can be seen in the in-flow distribution on the lower rotor, but these areinterleaved with additional ridges that are inducedby the close passage of tip vortices that are gener-ated by the blades of the upper rotor. Some disrup-tion to the inflow distribution is also visible at therear, particularly of the lower rotor, at all forwardspeeds. This is due to the root vortex system thatis generated by the blades of the rotors; as shownin Fig. 6, the presence of the fuselage immediatelybelow the main rotor system forces these vorticesto remain very close to the plane of the lower rotor
for a considerable distance aft of the rotor shaft.
The effects of the passage of the individual bladesof the top rotor over those of the lower rotor areclearly evident as a set of six radial ridges in the in-flow experienced by the lower rotor; similar featuresare almost entirely absent from the inflow distribu-tion on the upper rotor. At the lowest advanceratio a significant proportion of the lower rotor lieswithin the downwash field that is generated by theupper rotor, but as the forward speed of the systemis increased, this region of maximum interaction be-tween the rotors moves aftwards on the lower rotorin response to the rearwards skewing of the wakeof the upper rotor.
(a) µ = 0.05
(b) µ = 0.10
(c) µ = 0.15
(d) µ = 0.30
Figure 13: Inflow distribution over the main rotor discs,showing the strong interaction between the upper andlower rotors at all forward speeds. (Left: upper rotor.Right: lower rotor.)
12

0 60 120 180 240 300 3601.1
1.2
1.3
1.4
1.5
Azimuth, ψ (deg)
Thr
ust C
oeffi
cien
t, C
T
µ = 0.05µ = 0.10µ = 0.15µ = 0.30
x 10−2
(a) Total thrust coefficient.
0 60 120 180 240 300 3605
6
7
8
9
10
11
12x 10
−4
Azimuth, ψ (deg)
Pow
er C
oeffi
cien
t, C
P
µ = 0.05µ = 0.10µ = 0.15µ = 0.30
(b) Total power coefficient.
Figure 14: Temporal variation in the thrust produced and power consumed by the coaxial system over one revolu-tion.
0 60 120 180 240 300 3605
5.5
6
6.5
7
7.5x 10
−3
Azimuth, ψ (deg)
Thr
ust C
oeffi
cien
t, C
T
Upper RotorLower RotorAverage
(a) Thrust coefficient.
0 60 120 180 240 300 3603.4
3.6
3.8
4
4.2
4.4
4.6x 10
−4
Azimuth, ψ (deg)
Pow
er C
oeffi
cien
t, C
P
Upper RotorLower RotorAverage
(b) Power coefficient.
Figure 15: Temporal variation in the thrust produced and power consumed by the upper and lower rotors of thecoaxial system over one revolution at advance ratio µ = 0.15.
Figures 14 and 15 show the effect of the inter-actions between the two rotors on the loading pro-duced on the main rotor system. Figure 14 showsthe variation of thrust and power produced by thecoaxial rotor over a single rotor revolution at eachof the various flight speeds that were tested.
At all forward speeds, both the thrust and torqueproduced by the main rotor show significant un-steadiness, principally at 3Ωc but also with a sig-nificant 6Ωc contribution. Although it is likely thatthe fuselage vibration modes in a practical systemwill be tuned away from these fundamental rotorfrequencies, the amplitude of the excitation as pre-dicted here, especially for advance ratios in thetransitional range between µ = 0.10 and µ = 0.15,may be sufficient to require specific provisions forattenuation within the drive train and rotor mount-ing system. To reveal the origins of the excitation,Fig. 15 shows the variation of thrust and powerproduced by the coaxial system, decomposed intothe individual contributions from the upper and
lower rotors. The figure shows the situation at anadvance ratio µ = 0.15 where arguably the inter-action between the upper and lower rotors is atits strongest. The curves marked ‘average’ repre-sent half the total thrust or torque produced by thesystem and are included to show how the contribu-tions from the individual rotors combine to give theoverall characteristic of the main rotor system.
To achieve yaw moment equilibrium on the air-craft at this advance ratio, the upper rotor is drivenby the trim routine to generate more power in themean than the lower rotor; this effect manifestsalso in a difference in the mean thrust produced bythe two rotors. In the context of the vibrationalcontent of the loading on the system, Figure 14shows the lower rotor to be the primary source ofthe 6Ωc excitation of the system. The phasing ofthe 6Ωc load on the rotor and the observation thatthis component of the load persists so strongly tohigher advance ratios — where direct aerodynamicinteraction between the rotors is significantly ame-
13

liorated by the rearwards sweep of their wakes — isconsistent with its origin being in the overpassage-type interference with the blades of the upper rotorthat appeared in Fig. 13 as the set of radial ridgesin the inflow distribution on the lower rotor. The3Ωc component of the forcing of both the thrustand the torque is almost equally shared betweenthe upper and lower rotors, and arises in the fun-damental aerodynamic behaviour of the very stiffrotors from which the coaxial main rotor system isconstructed (Ref. 15). Figure 16 shows the radialvariation of loading and power consumption on theblades of upper and lower rotor as a function ofazimuth with the helicopter trimmed into forwardflight at µ = 0.15. The phasing of the 3Ωc variationin the thrust and the torque produced by the mainrotor system is entirely consistent with the localisa-tion of the peaks of maximum loading produced byboth rotors to the rear quadrant of their respectiveadvancing sides. During the XH-59A developmentprogramme, significant success in reducing overallvibration of the system was achieved by using dif-ferential cyclic input to the upper and lower ro-tors to change the load distribution on the rotors,and hence the relative phasing of the 3Ωc vibra-tional component of their thrust and torque, in or-der to avoid the constructive interference betweenthe loading signals from the upper and lower rotorsthat is shown in this study (Refs. 2, 18, 19, 21).
Rotor-Propulsor Interaction
Figure 17 shows the variation of the thrust pro-duced by the propulsor, over a single revolution ofthe main rotor system, with the system trimmedinto forward flight at the various advance ratiosthat were simulated. This figure reveals that theloading produced on the propulsor is also highlyunsteady at all but the highest forward speeds. Astrong 3Ωc component to the loading as well as acomponent at the blade-passage frequency of thepropulsor is clearly discernible at all the advanceratios that were simulated.
Figure 18 shows the distribution of load on thepropulsor disc at each of the advance ratios thatwere simulated. Each individual plot shows the ra-dial distribution of load that is experienced by asingle blade of the propulsor, during a single rotorrevolution, as a polar function of blade azimuth.The blade loading has been decomposed into amean component and a superimposed RMS fluctu-ation to allow the origins of the unsteadiness in theloading on the system to be identified. Given itsdesign, the propulsor would produce its best per-formance if it were to operate in similar fashion to apropeller in free air, in other words, if it were to beexposed to a steady, axially-symmetric onset flow.The loading that is produced on the propulsor sug-
(a) Blade loading coefficient.
(b) Power coefficient.
Figure 16: Distribution of blade loading and power con-sumption over the upper and lower rotors of the coaxialsystem at advance ratio µ = 0.15. (Left: upper rotor.Right: lower rotor.)
gests that the onset flow experienced by this rotor isfar from this ideal, however, except perhaps at thehighest forward flight speed that was simulated. In-deed, Fig. 18 reveals the significant non-uniformityin the loading on the propulsor, at all forward flightspeeds, that is induced by its aerodynamic inter-action with the main rotor system and tailplane.The effects of the direct impingement of the wakesfrom the main rotor and the tailplane are clearlyevident as localised patches of high RMS contentto the loading. The location of these patches isentirely consistent with the dynamics of the wakethat is revealed in Fig 6 and 7; as the wake of themain rotor skews increasingly rearwards with in-creasing advance ratio, the patches of most signif-icant unsteadiness in the loading on the propulsortrack upwards across its face. The azimuthal inho-mogeneity in the loading experienced by the bladesas they rotate is primarily responsible for the fluc-tuations in the thrust produced by the propulsorat and above its blade-passage frequency. The 3Ωc
component of the thrust produced by the propulsoris below the rotational frequency of the device andhence cannot originate from this source, however.In fact, this component of the loading must resultdirectly from the temporal unsteadiness in the in-flow through the propulsor that is caused by theperiodic ingestion of the tip vortices from the mainrotor.
It may well be asked why the dominant frequencyof excitation of the load produced by the propul-
14

0 60 120 180 240 300 3602.1
2.2
2.3
2.4
0 60 120 180 240 300 360−1
0
1
2
3
4
5
6
7x 10
−3
Main Rotor Azimuth, ψ (deg)
Pro
puls
ive
Thr
ust C
oeffi
cien
t, C
X
µ = 0.05µ = 0.10µ = 0.15
µ = 0.30
x 10−2
(a) Thrust generated by propulsor.
0 60 120 180 240 300 3607
7.5
8x 10
−3
0 60 120 180 240 300 3603
4
5
6
7
8
9
10
11
12
13x 10
−4
Main Rotor Azimuth, ψ (deg)
Pow
er C
oeffi
cien
t, C
P
µ = 0.05µ = 0.10µ = 0.15
µ = 0.30
(b) Power required by propulsor.
Figure 17: Temporal variation in propulsor thrust and power over one main rotor revolution.
sor is 3Ωc rather than 6Ωc, given that the coax-ial main rotor contains six blades in total. Thisanomaly appears to be a consequence of the phas-ing of the rotation of the upper and lower rotors ofthe coaxial system. It is suggested above that theroot cause of the low-frequency unsteadiness in thepropulsor load is the entrainment of the tip vor-tices that the blades of the upper and lower rotorsproduce from the rear of their respective discs. Inthe configuration that was simulated, the blades ofthe upper and lower rotors pass directly over eachother at the rear of the fuselage, with the resultthat the tip vortices from the two systems are laiddown almost simultaneously into the flow at therear of rotor. Except at the lowest forward speeds,where the downwards trajectory of the wake andthe separation between the rotor discs causes thetip vortices to remain as relatively distinct struc-tures, the vortices from the upper and lower rotorsinteract behind the rotor to behave effectively as asingle coherent structure by the time that they in-teract with the propulsor. This process can be seenby careful examination of Fig. 10 and has the conse-quence that the inflow through the propulsor, andhence the loading, fluctuates at the lower than ex-pected frequency. The effect of changing the phas-ing of the main rotors on the frequency content ofthe unsteady component of the load produced bythe propulsor has yet to be investigated, however.
Most interestingly, Fig. 17 illustrates well thedifficulties that might be encountered with thepusher-propulsor configuration in properly schedul-ing the division of loading between the main rotor
system and the propulsor. Figure 3 shows that, atan advance ratio µ = 0.15, the propulsor is requiredto produce very little thrust — the scheduling ofthe rotor tilt has resulted in most of the propul-sive requirement being transferred to the main ro-tor. Fig. 17 shows the resultant 3Ωc fluctuationin the propulsor loading to be almost as large asthe required mean thrust from the propulsor. Thepropulsor thus acts as a powerful source of dy-namic excitation of the helicopter without muchbeneficial effect on the performance of the vehicle.This case is extreme, but given that the main ro-tor wake ceases to impinge on the propulsor onlyat relatively high advance ratio, there is the pos-sibility that similar dynamic excitation might be afeature of the configuration over a relatively broadrange of forward speeds — at least, given the datapresented in Fig. 17, over the transitional range ofadvance ratios from µ = 0.10 to 0.15. Certainlya tail-mounted propulsor that is left to rotate ator near its operating speed without producing anyuseful thrust does not appear to yield an ideal de-sign solution, and the device may well do simplyto be stopped and its blades feathered until highenough forward flight speed is attained for it to beclear of the main rotor wake.
Rotor-Tailplane Interaction
The close passage of the main rotor tip vortices overthe empennage also induces significant unsteadi-ness in the pressure distribution on the horizontaltailplane. Figure 19 compares the pressure coeffi-
15

(a) µ = 0.05
(b) µ = 0.10
(c) µ = 0.15
(d) µ = 0.30
Figure 18: Distribution of the blade loading coefficientover the propulsor disc, as seen from behind the heli-copter. (Left: mean loading. Right: RMS fluctuationin loading.) Note that different scales are used in eachplot.
cient C ′P = 100(p−p∞)/(12ρ(ΩR)2) at the centre of
area of the upper surfaces of the port and starboardsides of the tailplane, at advance ratio µ = 0.10, byplotting its variation over a single main rotor revo-lution. The amplitude of the pressure fluctuationson the port and starboard sides of the tailplane aresimilar in magnitude but the 3Ωc pressure peaks onthe port and starboard sides are offset in phase byapproximately 30 of a main rotor revolution. Atthis advance ratio, the tip vortex from the upperrotor passes closest to the port side of the tailplane,and the tip vortex from the lower rotor passes clos-est to the starboard side of the tailplane as shownin Fig. 10. The observed phase offset is a result ofthe slightly different times of arrival at the tailplaneof the vortices from the upper and lower rotors atthis low forward speed.
At µ = 0.15, the effect of the root vortices fromthe main rotors in skewing the flow near the em-pennage can be seen quite strongly in the loading
distribution on the tailplane. Figure 20 again com-pares the pressure coefficient at the centre of area ofthe upper surfaces of the port and starboard sidesof the tailplane by plotting its variation over a sin-gle main rotor revolution. As at the lower advanceratio, the pressure on both the port and starboardsides of the tailplane is characterised by a markedfluctuation at the blade-passage frequency of themain rotor. The shape of the pressure signal atthis location is reminiscent of those generated bythe ‘type 2’ close wake-surface interactions that aredescribed by Leishman (Ref. 23). The pressuresignals that result from this type of interaction arevery sensitive to the location of the vortices rela-tive to the surface, and, indeed, the asymmetry inthe amplitude of the pressure fluctuations on eitherside of the tailplane is suggestive of a greater miss-distance between the tailplane and the interferingwake vortices on the starboard side of the tailplanethan on the port.
At higher advance ratio, the pressure signal mea-sured on the tailplane changes significantly in char-acter. Fig. 21 shows the pressure on the tailplaneat µ = 0.30, as at lower forward speed, to bemodulated at 3Ωc by the close passage of thetip vortices from the main rotor. At µ = 0.30,though, the propulsor is required to generate con-siderably more thrust than at lower advance ra-tios. The interaction between the highly-loadedpropulsor and nearby components of the vehiclemanifests in the pressure measured on the tailplaneas a high-frequency fluctuation at the propulsor’sblade-passage frequency. On some fixed-wing air-craft with pusher propellers the fatigue life of anyaerodynamic surfaces that are exposed to such aninteraction can be reduced significantly, but it isalso known that the actual magnitude of the inter-action is very sensitive to the relative position ofthe propeller and the affected aerodynamic surfaceand thus is amenable to reduction through carefuldesign.
These localised pressure fluctuations integrate toproduce a periodic forcing of about five percent ofthe time-averaged loading on the tailplane at allof the forward speeds that were simulated. Theprincipally 3Ωc character of the unsteady forcingof the tailplane may contribute to the vibrationof the empennage of the vehicle. In strong con-rast, Fig. 5 shows the integrated effect of the pres-sures to result in very large changes with forwardspeed in the steady nose-up moment that is pro-duced by the tailplane. This is particularly so asthe aircraft passes through the range of advanceratios between 0.05 to 0.15, where Fig. 7 showsthe wake of the main rotor to impinge directly onthe tailplane. This particular pathology, known as‘pitch up’ when coupled to the longitudinal dynam-ics of the aircraft, has been a feature of many heli-
16

0 90 180 270 360−3
−2
−1
0
1
2
3
Main Rotor Azimuth, ψ (deg)
Pre
ssur
e C
oeffi
cien
t, C
P’
Port SideStarboard Side
Figure 19: Time-dependent pressure signals on the up-per surface of the tailplane at advance ratio µ = 0.10.(Mean removed.)
0 90 180 270 360−3
−2
−1
0
1
2
3
Port SideStarboard Side
Main Rotor Azimuth, ψ (deg)
Pre
ssur
e C
oeffi
cien
t, C
P’
Figure 20: Time-dependent pressure signals on the up-per surface of the tailplane at advance ratio µ = 0.15.(Mean removed.)
0 90 180 270 360−3
−2
−1
0
1
2
3
Port SideStarboard Side
Pre
ssur
e C
oeffi
cien
t, C
P’
Main Rotor Azimuth, ψ (deg)
Figure 21: Time-dependent pressure signals on the up-per surface of the tailplane at advance ratio µ = 0.30.(Mean removed.)
copters during their development stage (Refs. 5–7,9). Unless control margins are particularly narrow(for instance to prohibit overstressing of the bladesystem) the control power of the stiffened coaxialrotor is likely to be sufficient to allow the pilot to flythe aircraft through the affected speed range, butpilots often have poor regard for the strong non-linearity that this effect induces in the variation ofstick position with forward speed. As many histor-ical examples have shown, it can be very difficultto find a position for the tailplane which allows itto enhance the dynamic characteristics of the heli-copter in high speed flight while avoiding the dy-namic side-effects that are induced by interactionwith the wake of the main rotor at low forwardspeed.
Acoustic Signature
This final section of the paper considers thenoise produced by the thrust-compounded hinge-less coaxial configuration. The radiated acousticfield of the vehicle is computed using the Farassat-1A formulation (Ref. 24) of the Ffowcs Williams-Hawking equations. In the present numerical im-plementation, the aerodynamic force contributedby each blade panel was used to construct a pointacoustic source at the centre of each panel. Thesound that is radiated by each of these sources isthen integrated to represent the loading noise thatis produced by the blades. The aerodynamic modelassumes an infinitesimally thin blade; the thicknessnoise has thus to be modelled independently. Thisis done by attaching a source-sink pair to each bladepanel. Noise due to quadrupole terms is neglectedin the present work as are any acoustic effects thatare due to the presence of the fuselage. In theinterests of brevity, discussion of the acoustics ofthe configuration is limited to one flight condition(µ = 0.15), and data for only one observer plane ispresented. The sound pressure levels are scaled torepresent the noise that is generated by an aircraftwith a main rotor diameter of 5.5m and an all-upweight of 5562kg and thus to be representative ofa helicopter of the size and weight of the XH-59A.
Figure 22(a) shows a contour map of the totalsound pressure level (SPL) that is produced by theaircraft on a plane located one rotor radius be-low the hub of the lower main rotor of the sys-tem. Examination of the figure shows the thrust-compounded coaxial configuration to generate anacoustic signature that is qualitatively quite differ-ent to that produced by a conventional helicopter.With a conventional helicopter, the sound radia-tion pattern usually possesses a quite distinctivelateral asymmetry. This does not appear to be thecase with the stiffened coaxial system, where thehighly loaded advancing sides of both the upper
17

y/R
x/R
T
−3 −2 −1 0 1 2 33
2
1
0
−1
−2
−3
90
95
100
105
110
115
120
(a) Total noise.
y/R
x/R
B
−3 −2 −1 0 1 2 33
2
1
0
−1
−2
−3
90
95
100
105
110
115
120
(b) BVI noise.
Figure 22: Sound pressure level (in decibels) produced at advance ratio µ = 0.15 on a plane parallel to the ground,one rotor radius below the hub of the lower main rotor.
0 0.2 0.4 0.6 0.8 1−60
−40
−20
0
20
40
60
Time (Main Rotor Rev)
Aco
ustic
Pre
ssur
e (P
a)
TotalUpper RotorLower RotorPropulsor
(a) At point T (maximum SPL) in Fig. 22(a).
0 0.2 0.4 0.6 0.8 1−60
−40
−20
0
20
40
60
Time (Main Rotor Rev)
Aco
ustic
Pre
ssur
e (P
a)
TotalUpper RotorLower RotorPropulsor
(b) At point B (maximum BVI SPL) in Fig. 22(b).
Figure 23: Time-history of acoustic pressure at the locations of maximum SPL shown in Fig. 22.
and lower rotors dominate the acoustic signatureand combine to produce a much more symmetricradiation pattern.
The point of maximum SPL (or ‘hotspot’) on theplane below the rotor is represented by a symbol ,labelled ‘T ’ in the figure, and is located directlybelow the tip of the main rotor at azimuth ψ = 0.The time history of the acoustic pressure at thispoint is shown in Fig. 23(a) and its associated fre-quency spectrum in Fig. 24. Figure 24(b) showsthe noise that is radiated from lower main rotorto be significantly greater than that from the up-per rotor of the coaxial system over the entire fre-quency range. While the major contribution to thenoise from the coaxial system is at its blade-passagefrequency, the lower rotor also radiates significantnoise at twice its blade-passage frequency and alsoin the BVI frequency range. The noise contributionfrom the propulsor, particularly at its own blade-passage frequency, is also significant as can be seenfrom Figs. 23(a) and 24(a). In comparison to the
main rotor, though, the acoustic contribution fromthe propulsor is spread over a much broader band-width. Part of the impulsive noise created by thisrotor at high frequencies is undoubtedly due to thedirect passage of the wake from the main rotor andtailplane through the propulsor disc at this advanceratio.
Figure 22(b) shows a contour map of the SPLthat is produced in the BVI frequency range (5-40times the blade-passage frequency) by the aircraft.For a conventional rotor, one would typically ex-pect to see two hotspots in the BVI-related acousticsignature — one each associated with the acousticradiation from the blades on the advancing and re-treating sides of the rotor (Ref. 25). This is not thecase with the stiffened coaxial system — Fig. 22(b)shows the BVI-related component of the SPL onthe ground plane to be concentrated on the portside of the aircraft.
The reason for this asymmetry is revealed in theinflow maps shown in Fig. 13. These show a much
18

101
102
103
40
50
60
70
80
90
100
110
120
Frequency (Hz)
SP
L (d
B)
NbcΩc →
NbtΩt →
TotalPropulsor
(a) Total SPL and contribution from the propulsor.
101
102
103
40
50
60
70
80
90
100
110
120
Frequency (Hz)
SP
L (d
B)
NbcΩc →
NbtΩt →
Upper RotorLower Rotor
(b) Contributions from the upper and lower rotor.
Figure 24: Acoustic noise spectrum at point T (location of maximum total SPL) in Fig. 22(a).
stronger pattern of BVI-induced ridges in the in-flow on the lower than on the upper rotor of thecoaxial system, particularly at this advance ratiowhere the tip vortices of the upper rotor pass di-rectly through the disc of the lower rotor and pro-duce a strong additional contribution to its BVI-induced loading. Indeed, the time history of thepressure signal at the point of maximum BVI noise,presented in Fig. 23(b), shows clear evidence ofBVI-type impulses that originate almost entirelyfrom the lower rotor. As shown in Fig. 16, the rearquadrant of the advancing side of the lower rotoris highly loaded compared to its retreating side,with the result that the acoustic emission from thispart of the rotor is enhanced compared to the re-treating side. The combination of high loading andenhanced BVI activity results in the rear of the ad-vancing (port) side of the lower rotor dominatingthe BVI-related acoustic emission from the coaxialrotor system, and thus the bias of this componentof the SPL on the ground plane to the port side ofthe aircraft as shown in Fig. 22(b).
Thus it appears that the acoustic signature fromthe system is exacerbated by a loading distributionthat is produced largely in response to the require-ment for the main rotor to counter the strong nose-up pitching moment from the tailplane at this flightcondition (see Fig. 5). This is a particularly inter-esting example of how long-range aerodynamic cou-pling between disparate parts of the configurationcan have largely unforeseen consequences on super-ficially unrelated characteristics of the aircraft
Finally, Fig. 25 shows a contour map of the con-tribution of the propulsor on its own to the SPLon the plane located one rotor radius below thelower rotor of the system. The orientation of thepropulsor results in a rather undesirable focusingof the noise from the helicopter. This is becausethe in-plane component of the noise produced bythe propulsor radiates directly to the ground. The
y/R
x/R
−3 −2 −1 0 1 2 33
2
1
0
−1
−2
−3
85
90
95
100
105
Figure 25: Sound pressure level (in decibels) producedby the propulsor at advance ratio µ = 0.15 on a planeparallel to the ground, one rotor radius below the hubof the lower main rotor.
figure shows the directivity of the acoustic signa-ture on the plane below the aircraft to be directlyin line with the axis of the propulsor, and thenoise produced by this rotor to be concentrated intwo hotspots, one located upstream and the otherdownstream of the propulsor disc. The noise con-tributed by this rotor at the downstream hotspot,predicted to be 108dB, is much more intense thanat the upstream hotspot. Interestingly, the up-stream hotspot is located exactly at the positionof maximum overall noise produced by the configu-ration, with the consequence that the placementof the propulsor with respect to the main rotorcould have a significant effect on acoustic focusingwithin the system and thus possibly on the max-imum overall SPL produced by the configuration.The sensitivity of the acoustic signature of the con-figuration to the position of the propulsor has yetto be investigated in any detail, however.
19

By comparison, the sound pressure level at thelocation of maximum noise produced by the he-licopter is predicted to be approximately 120dB,while at the location of maximum BVI noise, theSPL is predicted to be approximately 112dB. Al-though it has been shown, as with the rotor vi-bration, that altering the relative phasing of therotation of the main rotors and the introduction ofdifferential cyclic pitch can have some effect in re-ducing the noise that is produced by stiffened coax-ial rotor systems, both these values are much higherthan would be expected for an equivalent conven-tional helicopter (Ref. 26).
Conclusions
The aerodynamic and acoustic characteristics ofa generic, thrust-compounded coaxial helicopterhave been simulated using Brown’s Vorticity Trans-port Model. The configuration that has been stud-ied comprises a stiff coaxial main rotor system con-sisting of two, counter-rotating, three-bladed ro-tors, an auxiliary propulsor mounted in pusher con-figuration at the rear of the fuselage, and a stream-lined fuselage with a horizontal tailplane mountedjust forward of the propulsor. The various aero-dynamic interactions that are predicted to arisewithin the system over a range of forward speedshave been analysed in detail, the aim of the workbeing to show that modern computational tech-niques are advancing to a state where they can beused at an early stage in the design process to pro-vide useful insight into the likely aeromechanicalbehaviour of realistic helicopter configurations.
The aerodynamic environment of the configu-ration that was studied is characterised by verystrong aerodynamic interactions between its vari-ous components.
The aerodynamic environment of the main ro-tors of the system is dominated by the direct im-pingement of the wake from the upper rotor ontothe blades of the lower rotor, and the thrust andtorque produced by the system are highly unsteady— particularly at low forward speed. The fluctua-tions in the loading on the coaxial system occur atthe fundamental blade-passage frequency and areparticularly strong as a result of the phase rela-tionship between the signals from the upper andlower rotors, and also at twice the blade-passagefrequency as a result of the loading fluctuationsthat are induced on the system as a result of di-rect blade overpassage. The results presented heresupport the rationale behind previous studies thathave suggested that the vibration that is producedby stiffened coaxial systems can be ameliorated byapplying differential cyclic inputs to the upper andlower rotors or by modifying the phasing of the ro-tation of the upper rotor with respect to the lower.
The wake of the main rotor sweeps over the fuse-lage and tailplane at low forward speed, induc-ing a significant nose-up pitching moment on thetailplane that must be counteracted by longitudi-nal cyclic input to the main rotor. This pitch-upcharacteristic has been encountered during the de-velopment of several helicopters and has proved onoccasion to be very troublesome to eradicate. Overa broad range of forward flight speeds, the wakefrom the main rotor is ingested directly into thepropulsor, where it induces strong fluctuations inthe loading produced by this rotor. These fluctua-tions occur at both the blade-passage frequency ofthe main rotor and of the propulsor, and are likelyto excite significant vibration of the aircraft. Theresults presented here suggest that this interaction,together with poor scheduling of the partition ofthe propulsive thrust between the main rotor anda rear-mounted propulsor with forward speed canlead to a distinctly non-optimal situation where thepropulsor produces significant vibratory excitationof the system but little useful contribution to itspropulsion.
With the present configuration, the propulsor in-duces significant vibratory forcing on the tailplaneat high forward speed. This forcing is at the fun-damental blade-passage frequency of the propulsor,and suggests that the tailplane position in any ve-hicle where the lifting surface and propulsor are asclosely coupled as in the present configuration mayhave to be considered carefully to avoid shorteningthe fatigue life of the tailplane. Nevertheless, theunsteady forcing of the tailplane is dominated byinteractions with the wake from the main rotor —the 3Ωc fluctuations that are observed in the pres-sure distribution on the tailplane are characteristicof the close passage of individual vortices over itssurface.
Finally, the character of the acoustic signaturegenerated by the system has been investigated.Data on a single plane below the system at one par-ticular flight condition has been presented to sug-gest that the overall noise produced by the system,at least in slow forward flight, is significantly higherthan that produced by similar conventional heli-copters in the same weight class. The major con-tribution to the BVI noise comes from the lower ro-tor because of strong aerodynamic interaction withthe upper rotor. The propulsor contributes signif-icant noise (up to 108dB) over a broad frequencyspectrum. At the flight condition that was consid-ered, much of this noise is induced by interactionsbetween the blades of the propulsor and the wakeof the main rotor and tailplane.
The numerical calculations are thus able to re-veal many of the aerodynamic interactions thatmight be expected to arise in a configuration asaerodynamically complex as the generic thrust-
20

augmented coaxial helicopter that formed the ba-sis of this study. Of course the exact form, andparticularly the effect on the loading produced onthe system, of these interactions may vary depend-ing on the specifics of the configuration. Indeed,more careful or considered design may be capableof eliminating entirely some of the effects that arehighlighted in this study.
Nevertheless, the results presented here lendweight to the assertion that the state of the art ofcomputational helicopter aerodynamic predictionsis advancing to a stage where, despite the histor-ical record in this regard, the use of such mod-els may allow sufficiently trustworthy insight intothe behaviour of such systems to be obtained earlyenough in the design process for any aeromechani-cal problems to be circumvented before they man-ifest on the prototype or production item.
Acknowledgements
The authors would like to thank Mr. Carlos Sousa(Universidade Tecnica de Lisboa and a VisitingStudent at Glasgow University) for his assistance increating the fuselage geometry used in this study.
References
1Coleman, C.P., “A Survey of Theoretical andExperimental Coaxial Rotor Aerodynamic Re-search,” NASA TP-3675, March 1997.
2Burgess, R.K., “The ABCTMRotor — A Histori-cal Perspective,” American Helicopter Society 60th
Annual Forum, Baltimore, MD, 7–10 June 1971.
3Orchard, M., Newman, S., “The fundamentalconfiguration and design of the compound heli-copter,” Proceedings of Institution of MechanicalEngineers Vol. 217 Part G: Journal of AerospaceEngineering, G01702, October 2003, pp. 297–315.
4Sheridan, P.F., Smith, R.P., “InteractionalAerodynamics — A New Challenge to HelicopterTechnology,” Journal of the American HelicopterSociety, January 1980, pp. 3–21.
5Cooper, D.E., “YUH-60A Stability and Con-trol,” Journal of the American Helicopter Society,Vol. 23, No. 3, 1978, pp. 2–9.
6Prouty, R.W., Amer, K.B.,“The YAH-64 Em-pennage and Tail Rotor — A Technical History,”American Helicopter Society 38th Annual Forum,Anaheim, California, USA, 1982, pp. 247–261.
7Main, B.J., and Mussi, F., “EH101 — Devel-opment Status Report,” Proceedings of the 16th
European Rotorcraft Forum, Glasgow, UK, 1990,pp. III.2.1.1–12.
8Cassier, A., Weneckers, R., and Pouradier, J.,“Aerodynamic Development of the Tiger Heli-copter,” Proceedings of the American HelicopterSociety 50th Annual Forum, Washington DC, 1994.
9Eglin, P., “Aerodynamic Design of the NH90 He-licopter Stabilizer,” Proceedings of the 23rd Euro-pean Rotorcraft Forum, Dresden, Germany, 1997,pp. 68.1–10.
10Frederickson, K.C., and Lamb, J.R., “Experi-mental Investigation of Main Rotor Wake InducedEmpennage Vibratory Airloads for the RAH-66Comanche Helicopter,” Proceedings of the Amer-ican Helicopter Society 49th Annual Forum, St.Louis, Missouri, USA, 1993, pp. 1029–1039.
11Brown, R.E., “Rotor Wake Modeling for FlightDynamic Simulation of Helicopters,” AIAA Jour-nal, Vol. 38, No. 1, January 2000, pp. 57–63.
12Brown, R.E., Line, A.J., “Efficient High-Resolution Wake Modeling Using the VorticityTransport Equation,” AIAA Journal, Vol. 43,No. 7, April 2005, pp. 1434–1443.
13Kenyon, A.R., Brown, R.E., “Wake Dynam-ics and Rotor-Fuselage Aerodynamic Interactions,”American Helicopter Society 63rd Annual Forum,Virginia Beach, VA, May 2007.
14Kim, H.W., Brown, R.E., “Coaxial Rotor Per-formance and Wake Dynamics in Steady and Ma-noeuvring Flight,” American Helicopter Society62nd Annual Forum, Phoenix, AZ, May 2006.
15Kim, H.W., Brown, R.E., “Impact of TrimStrategy and Rotor Stiffness on Coaxial Rotor Per-formance,” 1st AHS/KSASS International Forumon Rotorcraft Multidisciplinary Technology, Seoul,Korea, 15–17 October 2007.
16Ruddell, A.J., “Advancing Blade Concept(ABCTM) Development,” American Helicopter So-ciety 32nd Annual Forum, Washington, D.C., May1976.
17Burgess, R.K., “Development of the ABC Ro-tor,” American Helicopter Society 27th Annual Fo-rum, Washington, D.C., May 1971.
18Halley, D.H., “ABC Helicopter Stability, Con-trol, and Vibration Evaluation on the PrincetonDynamic Model Track,” American Helicopter So-ciety 29th Annual Forum, Washington, D.C., May1973.
19Paglino, V.M., “Forward Flight Performance ofa Coaxial Rigid Rotor,” American Helicopter So-ciety 27th Annual Forum, Washington, D.C., May1971.
21

20Dingeldein, R.C., “Wind-Tunnel Studies of thePerformance of Multirotor Configurations,” NACATN-3236, August 1954.
21Paglino, V.M., Beno, E.A., “Full-Scale Wind-Tunnel Investigation of the Advancing Blade Con-cept Rotor System,” USAAMRDL TR 71-25, Au-gust 1971
22Fletcher, T.M., Brown, R.E., “Main Rotor —Tail Rotor Wake Interaction and its Implicationsfor Helicopter Directional Control,” 32nd Euro-pean Rotorcraft Forum, Maastricht, Netherlands,September 2006.
23Bi, N.P., Leishman, J.G., “Analysis of UnsteadyPressures Induced on a Body by a Rotor,” Journalof Aircraft, Vol. 28, No. 11, 1991, pp. 756–767.
24Farassat, F., Succi, G.P. “A Review of PropellerDiscrete Frequency Noise Prediction Technologywith Emphasis on Two Current Methods for TimeDomain Calculations,” Journal of Sound and Vi-bration, Vol. 71, No. 3, 1980, pp. 399–419.
25Kelly, M.E., Duraisamy, K., Brown, R.E.,“Blade Vortex Interaction and Airload Predic-tion using the Vorticity Transport Model,” Amer-ican Helicopter Society Specialists’ Conference onAeromechanics, San Francisco, CA, 23–25 January2008.
26Schmitz, F.H., “Aeroacoustics of Flight Vehi-cles: Theory and Practice,” NASA Reference Pub-lication 1258, Vol. 1, Chapter 2, August 1991,pp. 65–149.
22