Journal of Sound and Vibration - Acoustics and Dynamics ... et... · ... Department of Mechanical...
17
Interaction between two active structural paths for source mass motion control over mid-frequency range Jared Liette, Jason T. Dreyer, Rajendra Singh n Acoustics and Dynamics Laboratory, Department of Mechanical Engineering, The Ohio State University, Columbus, OH 43210, USA article info Article history: Received 12 August 2013 Received in revised form 6 November 2013 Accepted 6 December 2013 Handling Editor: D.J. Wagg Available online 21 January 2014 abstract The interaction between two active structural paths is analytically and experimentally studied as part of a resonating source-path-receiver system, where each path consists of a piezoelectric stack actuator in series with an elastomeric (passive) mount. An analytical model of the system is first developed, and then an experiment is constructed to verify the feasibility. Good agreement is found between the model and experiment. A performance index to characterize the active path interaction for source mass motion control up to 1000 Hz is analytically defined; it considers the passive phase interaction (caused by system dynamics) between the active mounts and the resulting system motion. Two passive system parameters (rubber path structural damping and disturbance moment arm) emerge as key design variables that drastically change the performance index, and guidelines are developed for desirable path interactions. Limited experimental validation demonstrates that active source mass motion control is achieved at 400 Hz using piezoelectric stack actuators. & 2013 Elsevier Ltd. All rights reserved. 1. Introduction Active mounts have been suggested for several engineering systems to primarily improve vibration isolation and resonance control, often with passive mounts used concurrently [1–13]. Conventional prime movers (e.g. automotive powertrains) generally have low frequency vibration excitations, and thus the primary mount function is to reduce the transmission of dynamic forces. Some recent hybrid electric powertrains also produce significant mid-frequency excitations (say from 100 to 1000 Hz) that amplify the source regime, creating significant structure-borne and radiated noise. Source mass motion control is thus needed to mitigate such unwanted noise [14–18]. Active mounts are still a viable solution, though different design perspectives need to be considered. In particular, the phase interaction (caused by passive system dynamics) between active mounts and the resulting system motion becomes more important as the frequency increases. This passive phase relationship may dictate the effectiveness of active control strategies (even at low frequencies), and it is the main thrust of this article. Relevant literature on active vibration isolation focuses on control algorithms [1–13]. For instance, decentralized velocity control is studied in systems with multiple active mounts [1–7], though the active path interactions are not adequately addressed. Interactions among passive paths have been studied to some extent [19,20], but active paths are fundamentally different due to the applied force. Active path interactions are not of interest in single mount [8–11] or Stewart platform [12,13] applications, but such configurations may not be viable due to multi-axial forces or limited packaging space. Contents lists available at ScienceDirect journal homepage: www.elsevier.com/locate/jsvi Journal of Sound and Vibration 0022-460X/$ - see front matter & 2013 Elsevier Ltd. All rights reserved. http://dx.doi.org/10.1016/j.jsv.2013.12.002 n Corresponding author. Tel.: þ1 614 292 9044; fax: þ1 614 292 3163. E-mail address: [email protected] (R. Singh). Journal of Sound and Vibration 333 (2014) 2369–2385
Transcript of Journal of Sound and Vibration - Acoustics and Dynamics ... et... · ... Department of Mechanical...

Contents lists available at ScienceDirect
Journal of Sound and Vibration
Journal of Sound and Vibration 333 (2014) 2369–2385
0022-46http://d
n CorrE-m
journal homepage: www.elsevier.com/locate/jsvi
Interaction between two active structural paths for sourcemass motion control over mid-frequency range
Jared Liette, Jason T. Dreyer, Rajendra Singh n
Acoustics and Dynamics Laboratory, Department of Mechanical Engineering, The Ohio State University, Columbus, OH 43210, USA
a r t i c l e i n f o
Article history:Received 12 August 2013Received in revised form6 November 2013Accepted 6 December 2013
Handling Editor: D.J. Waggfeasibility. Good agreement is found between the model and experiment. A performance
Available online 21 January 2014
0X/$ - see front matter & 2013 Elsevier Ltd.x.doi.org/10.1016/j.jsv.2013.12.002
esponding author. Tel.: þ1 614 292 9044; fail address: [email protected] (R. Singh).
a b s t r a c t
The interaction between two active structural paths is analytically and experimentallystudied as part of a resonating source-path-receiver system, where each path consists of apiezoelectric stack actuator in series with an elastomeric (passive) mount. An analyticalmodel of the system is first developed, and then an experiment is constructed to verify the
index to characterize the active path interaction for source mass motion control up to1000 Hz is analytically defined; it considers the passive phase interaction (caused bysystem dynamics) between the active mounts and the resulting system motion. Twopassive system parameters (rubber path structural damping and disturbance momentarm) emerge as key design variables that drastically change the performance index, andguidelines are developed for desirable path interactions. Limited experimental validationdemonstrates that active source mass motion control is achieved at 400 Hz usingpiezoelectric stack actuators.
& 2013 Elsevier Ltd. All rights reserved.
1. Introduction
Active mounts have been suggested for several engineering systems to primarily improve vibration isolation andresonance control, often with passive mounts used concurrently [1–13]. Conventional prime movers (e.g. automotivepowertrains) generally have low frequency vibration excitations, and thus the primary mount function is to reduce thetransmission of dynamic forces. Some recent hybrid electric powertrains also produce significant mid-frequency excitations(say from 100 to 1000 Hz) that amplify the source regime, creating significant structure-borne and radiated noise. Sourcemass motion control is thus needed to mitigate such unwanted noise [14–18]. Active mounts are still a viable solution,though different design perspectives need to be considered. In particular, the phase interaction (caused by passive systemdynamics) between active mounts and the resulting system motion becomes more important as the frequency increases.This passive phase relationship may dictate the effectiveness of active control strategies (even at low frequencies), and it isthe main thrust of this article.
Relevant literature on active vibration isolation focuses on control algorithms [1–13]. For instance, decentralized velocitycontrol is studied in systems with multiple active mounts [1–7], though the active path interactions are not adequatelyaddressed. Interactions among passive paths have been studied to some extent [19,20], but active paths are fundamentallydifferent due to the applied force. Active path interactions are not of interest in single mount [8–11] or Stewart platform[12,13] applications, but such configurations may not be viable due to multi-axial forces or limited packaging space.
All rights reserved.
ax: þ1 614 292 3163.

Nomenclature
a translational accelerationA constant coefficient for ~ΛB constant coefficient for ~Λc viscous damping coefficientC constant coefficient for ~ΛC matrix cofactorC matrix of cofactorsd disturbance moment armD constant coefficient for ~ΛE constant coefficient for ~Λf control forceF control force amplitudeF control force vectorg gravitational constantH dynamic complianceH dynamic compliance matrixi square root of �1I mass moment of inertiaI identity matrixk stiffnessK stiffness matrixℓ lengthL insertion lossm massℳ matrix minorM inertia matrixO null matrixq generalized displacement vectorQ displacement amplitude vectorS piezoelectric stack sensitivityt timew disturbance forceW disturbance force amplitudeW disturbance force vectorx, y, z Cartesian coordinatesα constant valueβ phase corresponding to ~Ξε translational displacementℰ translational displacement amplitudeη loss factorθ rotational displacementκ dynamic stiffnessκ dynamic stiffness matrixλ ω2
Λ compliance numerator dynamicsξ translational displacement at mountsΞ translational displacement amplitude
at mountsΠ transformation matrixϕ phase corresponding to ~f
χ effectiveness of the control forcesΨ acceleration root mean square valueω circular frequencyΩ resonance frequencyΩ vector of resonance frequencies
Subscripts
0,1,2,…,n general indicesb baseg referenced to discrete inertia
element coordinatesi mount indexj inertia indexm mountn general indexn�n matrix of dimension (n, n)r receivers sourcet transitional valueη referenced to quadratic for transitional
loss factorλ referenced to quartic for transitional
frequency
Superscripts
a after control forces are appliedb before control forces are appliedB referenced to constant ~Bλ
C referenced to constant ~C λ
D referenced to constant ~Dλ
E referenced to constant ~Eλ
T transposex, y, z referenced to Cartesian coordinates� d( )/dt�� d2( )/dt2
~ complex valued– normalized parameter′ relating to equations of motion formulation
using mount displacements
Operators
|( )| magnitude of complex number∠ðÞ phase of complex number⟨⟩t time averagedet( ) determinantdiag( ) diagonal matrixIm{ } imaginary part of a complex numberRe{ } real part of a complex number
J. Liette et al. / Journal of Sound and Vibration 333 (2014) 2369–23852370
Reduction of mid-frequency structure-borne and radiated noise has been accomplished via active [14–18] and passivepatches [21,22], reducing the structure surface velocity to minimize the radiated sound pressure or altering the radiatingefficiency of the structure. Typically, the patches are bonded directly to the structure surface. Alternatively, active structuralpaths (mounts) could more effectively reduce the structure motion (and thus surface velocity).

passive path element
active path element
disturbance force
Source Mass
Receiver Mass
source motion
receiver motion
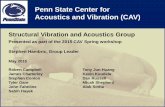
Fig. 1. Incorporation of active path elements to minimize source motion or sound radiation.
J. Liette et al. / Journal of Sound and Vibration 333 (2014) 2369–2385 2371
2. Problem formulation
The scope of this paper is limited to source mass motion control of a resonating source-path-receiver system that hastwo vertically oriented active structural paths, addressing both active path interactions and mid-frequency motion control.A simplified two path system is considered for conceptual analysis, and a schematic incorporating active path elements tominimize source motion (or sound radiation) is shown in Fig. 1. Relating this to say a hybrid electric powertrain, the sourcemass would be the electric motor, the paths would be the motor mounts (e.g. rubber mount in series with an actuator), andthe receiver mass would be the vehicle sub-frame. Specific objectives include the following: (1) develop an analytical modelof the system and define a performance index to characterize the active path interaction for source mass motion control upto 1000 Hz, (2) identify key passive design parameters and values dictating the defined performance index, and (3) designa feasibility experiment and investigate source mass motion control at a representative mid-frequency excitation of 400 Hz.
The system of Fig. 1 is assumed to be discrete, deterministic, frequency independent, and linear about an operating pointwith no kinematic nonlinear effects. Thus, superposition is valid, motions are small, and higher-order terms are ignored.Additionally, each mass is assumed to be rigid with no flexural mode participation, and a known external harmonicdisturbance force excites the source mass only. No real-time control is used, and closed form analytical control forceexpressions are instead derived at steady-state system behavior. In the structural paths, passive elements are assumedmassless while active elements possess mass, and structural damping is assumed at each stiffness element with a constantloss factor. Passive mounts in this study are made of rubber (elastomeric), and structural damping is a more valid model,especially at higher frequencies [23,24]. However, an equivalent Kelvin–Voigt configuration with viscous damping is usedfor limited time domain analysis. It is assumed that each actuator input can be represented by an applied force at a discretemass with a constant actuator gain. Thus, actuators are assumed to be linear and well known with no hysteresis effects.Rotational effects of the actuator inertia are also ignored, and all active mounts considered are piezoelectric stack actuators(i.e. stacks).
The stack force (generated from internal strain) is analytically applied at the corresponding discrete mass and istransmitted to both the source and receiver masses. This accounts for the source and receiver mass participation effectsobserved at the stacks. A constant gain S of voltage over force (provided by manufacturer [25], though stack models havebeen discontinued) is used for each stack, where S accounts for the charge–strain relationship and the specific dielectricmaterial constants. In general, a passive and active mount should be used in combination to provide vibration isolation.Thus, all structural paths consist of a stiff active piezoelectric stack (attached to the source mass) in series with a passiverubber elastomer (attached to the receiver mass), as suggested by Beard et al. [26].
3. Analytical model
A schematic of the analytical model is shown in Fig. 2(a) with inertial coordinates labeled. Motions are restricted to thex–z plane, and it is assumed that lateral motions in the x-direction are negligible. Here, m1 and Iy1 are the source mass andinertia (y refers to the Cartesian coordinate), m2 and Iy2 are the receiver mass and inertia, m3 and m4 are the masses of thestacks, i¼
ffiffiffiffiffiffiffiffi�1
p, ~k
zmi ¼ kzmið1þ iηzmiÞ are path mount complex valued stiffnesses with kzmi as the real stiffness and ηzmi as the loss
factor (m refers to a path mount, i is a mount index, and z refers to the Cartesian coordinate), ~kzbi ¼ kzbið1þ iηzbiÞ are compliant
base (receiver mass) mount complex valued stiffnesses with kzbi as the real stiffness and ηzbi as the loss factor (b refers to abase mount), ℓsn are characteristic lengths of the source (s refers to source and n is a general index), ℓrn are characteristiclengths of the receiver (r refers to receiver), t is time, εzgjðtÞ are vertical oscillatory motions (j is an inertia index and g refers toa center of mass motion), θygjðtÞ are rotational oscillatory motions, f znðtÞ are vertical control forces, wz
1ðtÞ is a verticaldisturbance force, and d is the moment arm for wz
1ðtÞ. Thus, wz1ðtÞ imparts both a force and moment on the source mass if
da0.The system of Fig. 2(a) has six degrees of freedom: two rotational and four translational. The resulting equations of
motion (derived using Newton0s Second Law) are written in compact matrix form in inertial coordinates as
M €qðtÞþ ~KqðtÞ ¼ FðtÞþWðtÞ (1)

Fig. 2. Schematic of the analytical model: (a) inertial coordinates and (b) example case with new coordinates at the attachments of active or passivemounts.
J. Liette et al. / Journal of Sound and Vibration 333 (2014) 2369–23852372
where M is the inertia matrix, ~K is the complex valued stiffness matrix (assuming harmonic excitation and response),qðtÞ ¼ fεzg1ðtÞ εzg2ðtÞ εzg3ðtÞ εzg4ðtÞ θyg1ðtÞ θyg2ðtÞgT is the generalized displacement vector, superscript T indicates atranspose, the control force vector is FðtÞ ¼ f0 0 f z3ðtÞ f z4ðtÞ 0 0gT , and WðtÞ ¼ fwz
1ðtÞ 0 0 0 wz1ðtÞd 0gT is the
disturbance force vector. Here,
M¼ diagðfm1 m2 m3 m4 Iy1 Iy2gÞ; (2)
~K ¼
~kzm1þ ~k
zm2 0 � ~k
zm1 � ~k
zm2
~kzm2ℓs2� ~k
zm1ℓs1 0
~kzm3þ ~k
zm4þ ~k
zb1þ ~k
zb2 � ~k
zm3 � ~k
zm4 0 ~k
zm4ℓs2� ~k
zm3ℓs1þ ~k
zb2ℓr2� ~k
zb1ℓr1
~kzm1þ ~k
zm3 0 ~k
zm1ℓs1
~kzm3ℓs1
⋮ ~kzm2þ ~k
zm4 � ~k
zm2ℓs2 � ~k
zm4ℓs2
symmetric ~kzm1ℓ
2s1þ ~k
zm2ℓ
2s2 0
⋯ ~kzm3ℓ
2s1þ ~k
zm4ℓ
2s2þ ~k
zb1ℓ
2r1þ ~k
zb2ℓ
2r2
26666666666664
37777777777775
(3)
where diag( ) is a diagonal matrix operator. Instead of motions at the source and receiver center of masses, the modelis analyzed at the mount attachment coordinates, labeled in Fig. 2(b) where ξzmi;gjðtÞ is the translational motion at path

J. Liette et al. / Journal of Sound and Vibration 333 (2014) 2369–2385 2373
mount i attached to inertia j. A transformation qðtÞ ¼Πq0ðtÞ is needed and q0ðtÞ ¼ fξzm1;g1ðtÞ ξzm2;g1ðtÞ εzg3ðtÞ εzg4ðtÞξzm1;g2ðtÞ ξzm2;g2ðtÞg,
(4)
On�n is an n�n null matrix, and In�n is an n�n identity matrix. Note that Π is time-invariant and assumes θygjðtÞ⪡1. Eq. (1) isre-written in the mount coordinates as follows where M0 ¼MΠ and ~K
0 ¼ ~KΠ:
M0 €q0ðtÞþ ~K0q0ðtÞ ¼ FðtÞþWðtÞ: (5)
4. Design of a feasibility experiment
A schematic of the experiment is shown in Fig. 3. The first flexural mode of the source or receiver should be above1000 Hz, as discrete masses are assumed in the model. The experiment is thus scaled to satisfy this assumption, such thatthe source and receiver are both 25.4�304.8 mm2 aluminum bars with 50.8 mm depths. The resulting first flexural mode isabout 1300 Hz, and two accelerometers (PCB model A353B66, 100 mV/g sensitivity [25]) are attached to each bar at ξzmi;gjðtÞ.The structural paths are piezoelectric stack actuators in series with rubber mounts, as assumed in the model. The stacks(PCB models 710M02 and 710M03, 0.067 and 0.036 N/V sensitivities, both now discontinued [25]) have a bandwidth of200–5000 Hz, and slightly different actuator models are used in each path. Rubber grommets are glued to a massive frameand the receiver mass to mimic the assumed compliant base, and a dSPACE board (model CP1104 [27]) is used for real timedata acquisition and force actuation. The disturbance force is supplied by an electrodynamic shaker (Ling Electronics model207, up to 4 lbf [28]) with a corresponding force transducer (PCB model 208C02, 11.241 mV/N sensitivity [25]) attached atthe stinger. It is assumed that the 400 Hz motions are relatively small (on the order of a micron), suitable for stacks andshould not violate the small deflection assumption.
Next, model parameter values are identified for the experiment. Masses are weighed, moments of inertia are found fromSolidWorks models [29], and lengths are measured. To determine ~k
zmi values, two single degree of freedom systems are
Fig. 3. Schematic of the experiment.
Table 1Comparison of natural frequencies Ωn=ð2πÞ.
Mode # Model [Hz] Experiment [Hz]
1 85 842 117 1203 237 2554 302 3215 1120 a
6 1546 a
a Correspond to stack mass resonances. Not identified since they areabove the frequency range of interest and not measured with the attachedinstrumentation.

J. Liette et al. / Journal of Sound and Vibration 333 (2014) 2369–23852374
examined. The first is a stack attached directly to a very large mass (assumed rigid) used to find ~kzm1 and ~k
zm2. A chirp voltage
signal excites the stack mass, and an accelerometer measures the response. This results in a single resonance peak.In general, k¼Ω2
nm where Ωn is the corresponding natural frequency (rad s�1) and m is the corresponding stack mass (m3
for ~kzm1 and m4 for ~k
zm2). Also, η¼ ðω2n�ω1nÞ=Ωn where ω1n and ω2n are the corresponding half-power frequencies (rad s�1).
The second setup is a stack and rubber mount in series with the mount attached directly to a very large mass, used to find~kzm3 and ~k
zm4. A chirp voltage signal again excites the stack, and parameters are found in the same manner. Finally, ~k
zbi
parameters are found by matching model and experiment natural frequencies (Ωn) and selecting reasonable rubber lossfactors. Table 1 summarizes Ωn values, with the model and experiment agreeing relatively well. The two highest Ωn
correspond to modes dominated by stack mass motions, but these are not measured with the attached instrumentation andare above the frequency range of interest. Table 2 summarizes all identified model parameters.
The entire mass of each stack is attributed to m3 or m4, respectively. However, a portion of each mass could participatewith the source mass, and a more representative model may require lower m3 and m4 values. Since these masses are smalland the associated Ωn are beyond 1000 Hz (well above the frequency range of interest), errors in the mass values shouldhave minimal effect. To test this, the model is perturbed 710 percent of the nominal m3 and m4 values. The resulting firstfour Ωn change by less than 1 percent from the original values, and thus this source of error can be neglected.
Next, the model and experiment are compared at a ω¼ 800π rad s�1 excitation frequency, and the measured disturbanceforce time history wz
1ðtÞ � 12:6sin ðωtÞ N is used as an input into the analytical model for a more realistic comparison. Thus,this comparison should be done in the time domain. The structural damping model using η is only valid in the frequencydomain, so equivalent viscous damping
c¼ ηkω
(6)
is instead implemented at each stiffness element in a Kelvin–Voigt configuration. A Simulink model [30] and the derivedequations of motion are used to predict q0ðtÞ, and displacements are twice differentiated with respect to time to calculate
Table 2Identified system parameters.
Parameter Value Units
m1 ¼m2 1.081 kgm3 0.075 kgm4 0.067 kgIy1 ¼ Iy2 8.347 g m2
~kzm1
5:46ð1þ i0:034Þ kN mm�1
~kzm2
2:48ð1þ i0:036Þ kN mm�1
~kzm3
0:61ð1þ i0:300Þ kN mm�1
~kzm4
0:53ð1þ i0:256Þ kN mm�1
~kzb1 ¼ ~k
zb2
0:42ð1þ i0:300Þ kN mm�1
ℓs1 ¼ ℓs2 100 mmℓr1 ¼ ℓr2 136 mmd 50 mm
az mgg
az mgg
t
az mgg
Fig. 4. Comparison of experiment and model for a 400 Hz disturbance force. Key: , measured and , predicted.

J. Liette et al. / Journal of Sound and Vibration 333 (2014) 2369–2385 2375
translational accelerations as aznðtÞ ¼ €ξznðtÞ. These can be directly compared to measured accelerations. Four high resolution
channels are available on the dSPACE board; and azm1;g1ðtÞ, azm2;g1ðtÞ, azm2;g2ðtÞ, and wz1ðtÞ are measured with a 15 kHz sampling
rate. The predictions are compared to the experiment in Fig. 4, normalized by the gravitational constant g, and a reasonablematch is obtained, giving confidence in the proposed approach. Band-limited white noise is added to the predictions forrealistic testing conditions, and the largest displacement is 21.8 μm, validating the small deflection assumption.
5. Quantification of path interaction
The relative phases between the harmonic forces and motions are of critical importance, and all analysis is doneassuming complex valued variables. The applied forces are defined as
~wz1ðtÞ ¼Wz
1eiωt ; (7)
~fz3ðtÞ ¼ Fz3e
iðωtþϕz3Þ; (8)
~fz4ðtÞ ¼ Fz4e
iðωtþϕz4Þ (9)
where Fzn and ϕzn are the amplitude and phase of ~f
znðtÞ and Wz
1 is the amplitude of ~wz1ðtÞ. Four control variables are thus
available: Fz3, Fz4, ϕ
z3, and ϕz
4.
To simplify the notation, define ~ξz1ðtÞ ¼ ~ξ
zm1;g1ðtÞ and ~ξ
z2ðtÞ ¼ ~ξ
zm2;g1ðtÞ as the motions to be reduced to virtually zero (motion
control). For effective vibration isolation, ~ξzm1;g2ðtÞ and ~ξ
zm2;g2ðtÞ could instead be minimized. Superposition is valid since the
system is assumed linear, and the source mass motions are defined as
~ξz1ðtÞ ¼ ð ~Ξ z
11þ ~Ξz13e
iϕz3 þ ~Ξ
z14e
iϕz4 Þeiωt ; (10)
~ξz2ðtÞ ¼ ð ~Ξ z
21þ ~Ξz23e
iϕz3 þ ~Ξ
z24e
iϕz4 Þeiωt (11)
where ~Ξzn1 is the complex valued amplitude due to ~wz
1ðtÞ, ~Ξzn3 is the complex valued amplitude due to ~f
z3ðtÞ, and ~Ξ
zn4 is the
complex valued amplitude due to ~fz4ðtÞ. Each ~Ξ
zn has an associated magnitude and phase, and it is desired to reduce the total
motion to zero. Ideally, this would be done by phase matching all ~Ξzn and setting the magnitude summation equal to zero.
Define the dynamic stiffness matrix ~κ 0 ¼ �ω2M0 þ ~K0in the mount coordinates, ~Q
0 ¼ f ~Ξ zm1;g1
~Ξzm2;g1
~ℰzg3
~ℰzg4
~Ξzm1;g2
~Ξzm2;g2gT as the complex valued displacement amplitude vector, ~ℰ
zgj as the complex valued amplitude of ~εzgjðtÞ,
and ~H0 ¼ ½ ~κ 0��1 as the complex valued compliance matrix. In general ~Q
0eiωt ¼ ~H
0f ~Fþ ~Wgeiωt , and each force is consideredseparately:
~Q01e
iωt ¼ ~H0fWz
1 0 0 0 Wz1d 0gTeiωt ; (12)
~Q03e
iðωtþϕz3Þ ¼ ~H
0f0 0 Fz3 0 0 0gTeiðωtþϕz3Þ; (13)
~Q04e
iðωtþϕz4Þ ¼ ~H
0f0 0 0 Fz4 0 0gTeiðωtþϕz4Þ: (14)
The general description of ~H0is
~H0 ¼
~H011
~H012
~H013
~H014
~H015
~H016
~H021
~H022
~H023
~H024
~H025
~H026
~H031
~H032
~H033
~H034
~H035
~H036
~H041
~H042
~H043
~H044
~H045
~H046
~H051
~H052
~H053
~H054
~H055
~H056
~H061
~H062
~H063
~H064
~H065
~H066
2666666666664
3777777777775; (15)
and the ~Ξzn of interest are thus ~Ξ
z11 ¼ ð ~H 0
11þ ~H015dÞWz
1, ~Ξz21 ¼ ð ~H 0
21þ ~H025dÞWz
1, ~Ξz13 ¼ ~H
013F
z3, ~Ξ
z23 ¼ ~H
023F
z3, ~Ξ
z14 ¼ ~H
014F
z4, and
~Ξz24 ¼ ~H
024F
z4. Eqs. (10) and (11) are re-written in terms of magnitude and phase as
~ξz1ðtÞ ¼ ðj ~Ξ z
11jeiβz11 þj ~Ξ z
13jeiðβz13 þϕz
3Þ þj ~Ξ z14jeiðβ
z14 þϕz
4ÞÞeiωt ; (16)
~ξz2ðtÞ ¼ ðj ~Ξ z
21jeiβz21 þj ~Ξ z
23jeiðβz23 þϕz
3Þ þj ~Ξ z24jeiðβ
z24 þϕz
4ÞÞeiωt (17)
where βzn ¼∠ ~Ξzn, ∠ðÞ is a phase operator, and jðÞj is a magnitude operator. The resulting phases are βz11 ¼∠ð ~H 0
11þd ~H015Þ,
βz21 ¼∠ð ~H 021þd ~H
025Þ, βz13 ¼∠ ~H
013, β
z23 ¼ ∠ ~H
023, β
z14 ¼ ∠ ~H
014, and βz24 ¼∠ ~H
024. As an example case for some physical meaning of
these phases, βz13 is the phase delay between the applied force Fz3 and the resulting motion at ~ξz1. Likewise, βz11 is the phase
delay between Wz1 and the resulting motion at ~ξ
z1.

J. Liette et al. / Journal of Sound and Vibration 333 (2014) 2369–23852376
For motion control, ~Ξ zn of either ~ξ
z1ðtÞ or ~ξ
z2ðtÞ can be phase matched, but not both. This is evident from Eqs. (10) and (11),
as each motion contains three ~Ξzn (six total), and only two phase control variables are available. Here, optimal control and an
appropriate cost function could be used to minimize both motions. Alternatively, all ~Ξz1n of ~ξ
z1ðtÞ are phase matched using ϕz
3and ϕz
4, defined as
ϕz3 ¼ βz11�βz13; (18)
ϕz4 ¼ βz11�βz14: (19)
Eq. (18) aligns the resulting motions at ~ξz1ðtÞ due to Wz
1 and Fz3; likewise, Eq. (19) aligns the resulting motions at ~ξz1ðtÞ due
toWz1 and Fz4. Thus, the control forces can create out-of-phase motions at ~ξ
z1ðtÞ relative to the motion caused byWz
1. It is thenassumed that βz23þϕz
3 ¼ βz21 and βz24þϕz4 ¼ βz21, phase matching all ~Ξ
z2n of ~ξ
z2ðtÞ and enabling out-of-phase motions at ~ξ
z2ðtÞ
due to Wz1 and Fzn. The validity of these assumptions determines the reduction amount of ~ξ
z2ðtÞ, which indicates the effect of
the passive interaction between the active paths on motion control performance. If both motions are reduced, theperformance is desirable. If only ~ξ
z1ðtÞ is reduced, the performance is undesirable, and optimal control would be needed to
provide some reduction to ~ξz2ðtÞ by not reducing ~ξ
z1ðtÞ all the way to zero, reaching an overall minimum.
Eqs. (16) and (17) are re-written as
~ξz1ðtÞ ¼ ðj ~Ξ z
11jþj ~Ξ z13jþj ~Ξ z
14jÞeiðωtþβz11Þ; (20)
~ξz2ðtÞ ¼ ðj ~Ξ z
21jþj ~Ξ z23jþj ~Ξ z
24jÞeiðωtþβz21Þ: (21)
To reduce motions to zero, set j ~Ξ z11jþj ~Ξ z
13jþj ~Ξ z14j ¼ 0 and j ~Ξ z
21jþj ~Ξ z23jþj ~Ξ z
24j ¼ 0. In matrix form,
j ~H 013j j ~H 0
14jj ~H 0
23j j ~H 024j
24
35 Fz3
Fz4
( )¼ �Wz
1
j ~H 011þd ~H
015j
j ~H 021þd ~H
025j
8<:
9=; (22)
where derived expressions are plugged in for ~Ξzn. Finally,
Fz3Fz4
( )¼ Wz
1
j ~H 013jj ~H
024j�j ~H 0
14jj ~H023j
j ~H 014jj ~H
021þd ~H
025j�j ~H 0
24jj ~H011þd ~H
015j
j ~H 023jj ~H
011þd ~H
015j�j ~H 0
13jj ~H021þd ~H
025j
8<:
9=; (23)
is derived, fully defining the control force expressions of Eqs. (8) and (9) in terms of known parameters.Using the derived control forces, ~ξ
z1ðtÞ is reduced to zero for any ω, while ~ξ
z2ðtÞ may increase or decrease. An effectiveness
χ2 ¼jð ~H 0
21þd ~H025ÞWz
1þ ~H023F
z3e
iϕz3 þ ~H
024F
z4e
iϕz4 j
j ~H 021þd ~H
025jWz
1
(24)
is defined to quantify the reduction of ~ξz2ðtÞ. Here, χ2 is j~ξz2ðtÞj with control forces divided by j~ξz2ðtÞj without control forces,
derived from Eq. (11). This can be expressed as an insertion loss on a dB basis as
L2 ¼ 20log101χ2
� �; (25)
and L2 is now the performance index by which the path interaction is characterized. Considering one ω at a time in 0.1 Hzincrements, L2 is calculated from 20 to 1000 Hz. It is plotted in Fig. 5 from 20 to 500 Hz, as no changes occur between 500and 1000 Hz. A positive value indicates a decrease in ~ξ
z2ðtÞ and thus a desirable performance. Here, the system is assumed
L
Valley #1 and #2
Peak #1 Peak #2
Fig. 5. Insertion loss L2 up to 500 Hz. Key: , L2 and - . - . -, 0 dB.

Fig. 6. Magnitude spectra of (a) ~H023 and (b) det ð ~κ 0Þ ~H 0
23.
J. Liette et al. / Journal of Sound and Vibration 333 (2014) 2369–2385 2377
symmetric (unlike in the experiment) to simplify the analysis in the next section. Specifically, ℓs ¼ ℓs1 ¼ ℓs2, ℓr ¼ ℓr1 ¼ ℓr2,~kzm2 ¼ ~k
zm1,
~kzm4 ¼ ~k
zm3,
~kzb2 ¼ ~k
zb1, m2 ¼m1, m4 ¼m3, and Iy2 ¼ Iy1; and the natural frequencies are slightly altered to yield
Ωn ¼ 2πf86 119 249 310 1534 1558gT rad s�1.In general, L2 is positive below the first rigid body mode (86 Hz) and negative beyond the fourth mode (310 Hz). Several
interesting features are labeled in Fig. 5: two peaks (#1 and #2) occur, creating a very desirable performance, and twovalleys (#1 and #2) occur, creating a very undesirable performance. Since none of these features correspond to systemresonances, they are investigated next.
6. Calculation of key design parameters
6.1. Investigation of the second peak in L2
The second peak frequency in L2 is about 280 Hz, and Eq. (11) is re-written as
~ξz2ðtÞ ¼ ðð ~H 0
21þ ~H025dÞWz
1þð ~H 023F
z3e
� i∠ ~H013 þ ~H
024F
z4e
� i∠ ~H014 Þeiβz11 Þeiωt (26)
where derived expressions for ~Ξzn and ϕz
n are used. The second term ð ~H 023F
z3e
� i∠ ~H013 þ ~H
024F
z4e
� i∠ ~H014 Þeiβz11 is of interest, as it
dictates how the control forces affect ~ξz2ðtÞ. Since the system is assumed symmetric, ~H
023 ¼ ~H
014, and the ~H
023 magnitude
spectra is plotted in Fig. 6(a). Note, numerical methods are used to calculate ~H0 ¼ ½ ~κ 0��1 from the analytical dynamic stiffness
~κ ¼ �ω2Mþ ~K in inertial coordinates, since
~κ 0 ¼ �ω2M0 þ ~K0 ¼ ½�ω2Mþ ~K�Π¼ ~κΠ: (27)
System resonances are present in Fig. 6(a) due to denominator dynamics from det ð ~κ 0Þ, where det( ) is a determinantoperator. To examine numerator dynamics only, the det ð ~κ 0Þ ~H 0
23 magnitude spectra is plotted in Fig. 6(b). A zero is evident at280 Hz, matching the L2 second peak frequency. Thus, the second peak appears to be controlled by the passive ~H
023 ¼ ~H
014
numerator dynamics.

Fig. 7. Effect of ηzm3 on (a) L2 and (b) det ð ~κ 0Þ ~H 023. Key: , ηzm3 ¼ 0:30; , ηzm3 ¼ 0:50; , ηzm3 ¼ 0:70; - . - . -, zero axes.
J. Liette et al. / Journal of Sound and Vibration 333 (2014) 2369–23852378
One parameter that may have flexibility when designing a system is the structural damping of the rubber path, ηzm3 ¼ ηzm4.Its affect on the second peak of L2 is numerically investigated in Fig. 7(a) where values of ηzm3 ¼ 0:30, 0.50, and 0.70 are allplotted. As ηzm3 increases, the peak frequency (labeled ω1, ω2, and ω3) increases, and the width of the peak decreases. Bothhave interesting design implications, as one could use ηzm3 to shift the peak to a heavily excited frequency regime (e.g.a motor operating speed). A wider width is likely preferred, as a desirable performance occurs at more frequencies,suggesting that lower damping is better when considering the performance in a broadband sense.
With enough damping, the second peak disappears entirely. It is of interest to analytically calculate the transitional valueðηzm3Þt where this occurs, as practical designs should avoid ηzm3Z ðηzm3Þt . The effect of ηzm3 is further investigated by plottingdet ð ~κ 0Þ ~H 0
23 on the complex plane, shown in Fig. 7(b), with the peak frequencies from Fig. 7(a) labeled. Here,Im fdet ð ~κ 0Þ ~H 0
23g � 0 when ωn occurs, where Im{ } takes the imaginary part of the argument; Im fdet ð ~κ 0Þ ~H 023g should be
zero when ðηzm3Þt is used and ω¼ωt (ωt is the transitional frequency). Further, Re fdet ð ~κ 0Þ ~H 023g crosses the imaginary axis
between 0:50oηzm3o0:70, where Re{ } takes the real part of the argument. This causes the phase to go from �1801 to 01,specifically before and after Re fdet ð ~κ 0Þ ~H 0
23g ¼ 0. Such a phase shift completely switches the effect of ~H023 ¼ ~H
014 on the
control forces, causing a desirable performance to become undesirable. The mathematical conditions for the transitionalpoint are thus
Im fdet ð ~κ 0Þ ~H 023g ¼ 0; (28)
Re fdet ð ~κ 0Þ ~H 023g ¼ 0: (29)
After analytically defining det ð ~κ 0Þ ~H 023 and much manipulation, Eqs. (28) and (29) are re-defined as
Im f ~Λg ¼ Im f ~Aλgλ4t � Im f ~Bλgλ3t þ Im f ~C λgλ2t � Im f ~Dλgλtþ Im f ~Eλg ¼ 0; (30)
Re f ~Λg ¼ Aηðηzm3Þ2t þBηðηzm3ÞtþCη ¼ 0: (31)

J. Liette et al. / Journal of Sound and Vibration 333 (2014) 2369–2385 2379
Here, ~Λ is a complex valued fourth-order polynomial of λ¼ω2 that retains the ~H023 numerator dynamics; and Im f ~Aλg,
Im f ~Bλg, Im f ~C λg, Im f ~Dλg, Im f ~Eλg, Aη, Bη, and Cη are real valued constants in terms of ℓs, ℓr , Iyj , mj, ~k
zmi, and
~kzbi. The last three
constants are functions of the transitional value λt, and all eight constants are now fully defined in Appendix A. Thederivation of ~Λ from det ð ~κ 0Þ ~H 0
23 is also given in Appendix A. To calculate ðηzm3Þt , λt is first found graphically from Eq. (30) andthen incorporated into Eq. (31) to solve for ðηzm3Þt using the quadratic equation. Since changing ηzm3 moves the peakfrequency, this is an iterative process. After four iterations, ðηzm3Þt ¼ 0:6803 and ωt=2π ¼ 300:71 Hz are calculated.
Fig. 8. Phase βz11 before and after transitional point of the first peak in L2 for (a) ηzm3 and (b) moment arm d. Key: (a) , ηzm3 ¼ 1:467; , ηzm3 ¼ 1:469 and(b) , d¼ 0:411; , d¼ 0:409.
Fig. 9. Calculated control force amplitudes. Key: , Fz3; , Fz4; - . - . -, zero axis.

J. Liette et al. / Journal of Sound and Vibration 333 (2014) 2369–23852380
6.2. Investigation of the first peak in L2
Each component in the second term ð ~H 023F
z3e
� i∠ ~H013 þ ~H
024F
z4e
� i∠ ~H014 Þeiβz11 of Eq. (26) is again examined for the first peak,
and βz11 is the passive controlling component, expressed as
βz11 ¼∠ð ~H 011þd ~H
015Þ (32)
from the derivation in Section 5. Analytical expressions could be derived for ~H011 and ~H
015, but computational studies are
instead done for the sake of brevity. As with the second peak, the effect of increasing ηzm3 is examined. The peak frequencyagain increases, and the peak width decreases. Here, ðηzm3Þt ¼ 1:468 and ωt=2π ¼ 200:8 Hz are computationally found, and βz11is plotted before and after ðηzm3Þt in Fig. 8(a). As with ~H
023 for the second peak, the phase of βz11 changes by 1801 at ðηzm3Þt ,
causing a desirable performance to become undesirable.From Eq. (32), it is evident that the first peak is not only effected by passive system dynamics in ~H
011 and ~H
015, but also by
the external disturbance force moment arm d. Define d¼ d=ℓs as a normalized moment arm with d¼ 0:50 initially. Througha numerical study, dt ¼ 0:410 and ωt=2π ¼ 173:9 Hz are computationally found, and βz11 is plotted before and after dt in Fig. 8(b).The phase at the transitional point again changes by 1801, and this suggests that the path interaction is more desirable when thedisturbance force is moved away from the center of mass, as the first peak disappears when d is too low. Note, decreasing d onlyincreases the peak frequency slightly but greatly reduces the peak width.
6.3. Investigation of the valleys in L2 and transitional parameter summary
While the other L2 features are due to passive system properties dictating the path interactions, the valleys arise due tonumerical issues. When calculating the control force amplitudes in Eq. (23), j ~H 0
13jj ~H024j�j ~H 0
14jj ~H023j is in the denominator; it
crosses the zero axis at the valley frequencies, causing Fz3 and Fz4 to go to 71. This is illustrated in Fig. 9, and Fzn vs. ω isa smooth curve elsewhere. In a realistic system, Fzn-71 would be addressed with defined limits on the control forces oran appropriate cost function in optimal control. Increasing ηzm3 can also fix this, as it shifts j ~H 0
13jj ~H024j�j ~H 0
14jj ~H023j so that no
zero crossings occur; ðηzm3Þt ¼ 0:434 and ωt=2π ¼ 104:1 Hz are computationally found. A plot of L2 before and after ðηzm3Þt isshown in Fig. 10(a) for both valleys. This is also shown for the first peak in Fig. 10(b) and the second peak in Fig. 10(d). Finally,L2 is plotted before and after dt for the first peak in Fig. 10(c).
L
Fig. 10. Insertion loss L2 before and after transitional point for (a) the first and second valleys for ðηzm3Þt , (b) the first peak for ðηzm3Þt , (c) the first peak for dt,and (d) the second peak for ðηzm3Þt . Key: (a) , ηzm3 ¼ 0:430; , ηzm3 ¼ 0:440; (b) , ηzm3 ¼ 1:467; , ηzm3 ¼ 1:469; (c) , d¼ 0:411; , d¼ 0:409; and(d) , ηzm3 ¼ 0:679; , ηzm3 ¼ 0:681.

Fig. 11. Motion control of a 400 Hz disturbance force for (a) model and (b) experiment.
Table 3Predicted and measured insertion losses for a 400 Hz disturbance force.
Insertion loss Predicted [dB] Measured [dB]
L1 40 11L2 �6 1
J. Liette et al. / Journal of Sound and Vibration 333 (2014) 2369–2385 2381
Recall, it is noted in Section 4 that a portion of each stack mass could participate with the source mass, effectivelylowering m3 and m4 and creating a source of error. By perturbing the model around 710 percent of both nominal massvalues and observing less than 1 percent change in the first four Ωn, this source of error is concluded to be negligible.However, it may affect the calculated transitional values. The model is again perturbed around 710 percent of m3 ¼m4
(symmetric system assumed) to test this. Less than 70.5 percent change is observed in ðηzm3Þt for the second peak, and lessthan 71 percent change is observed in dt for the first peak. A significant change of up to 75 percent is observed in ðηzm3Þtfor the first peak; however, this does not alter any conclusions drawn or the analysis procedure outlined.
In general, the identified values of ðηzm3Þt are unrealistically high for a rubber mount, though the equivalent loss factor fora hydraulic mount may be as high as 0.70 [31]. Also, ðηzm3Þt may be lower for a different physical system, and it is importantto repeat the analysis as part of a design process. Even if ðηzm3Þt are high, selection of some ηzm3o ðηzm3Þt can be done to target aspecific frequency regime or to increase the width of the peak by lowering ηzm3, keeping in mind other design needs (such aspassive vibration isolation). The dt value identified is realistic, and d4dt should be selected if possible.
7. Experimental validation
Limited experimental validation for source mass motion control of a representative mid-frequency 400 Hz disturbanceforce is done using the piezoelectric stack actuators and the experimental setup of Fig. 3. No real time control is used,instead calculating needed control forces from the derivations in Section 5 and using a “human-in-the-loop” type feedbackto manually make small control parameter adjustments. Specifically, a 400 Hz sine wave is first applied using the attachedshaker. The amplitude of this force is measured in real time and used to calculate the control forces. Next, the forces areconverted to voltage units with the stack sensitivity S and used to excite the stacks. Finally, small adjustments are made toFz3, F
z4, ϕ
z3, and ϕz
4 by the user in real time until a reasonable reduction is achieved.Measured source mass accelerations are compared to the model in the time domain, where equivalent viscous damping
is used; band-limited white noise is added to simulate a noisy environment. Predicted results are shown in Fig. 11(a) for
az1ðtÞ ¼ €ξz1ðtÞ and az2ðtÞ ¼ €ξ
z2ðtÞ, and measured results are shown in Fig. 11(b). Here, wz
1ðtÞ � 27:1sin ð800πtÞ N, and a sampling
frequency of 15 kHz is used. The results appear similar and are quantified with root mean square accelerations Ψ ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi⟨ðaznÞ2⟩t
q,
where ⟨⟩t is a time average operator during steady-state system behavior. The insertion loss of Eq. (25) is re-defined asL¼ 20log10ðΨ b=Ψ aÞ, where superscripts b and a are before and after the control forces are applied, respectively. All insertion

J. Liette et al. / Journal of Sound and Vibration 333 (2014) 2369–23852382
losses are summarized in Table 3 for the model and experiment, where L1 refers to az1 and L2 refers to az2. Observe that themodel is able to reduce az1 to the noise floor, resulting in a very large L1. The stacks used in the experiment have someinternal noise issues and thus do not generate perfect sine waves. As a result, the experiment does not reduce az1 as much.Nevertheless, a significant L1 is achieved. The model predicts a small increase in az2, and while the experiment does notreplicate this, minimal L2 is measured. Thus, the model and experiment are in reasonable agreement.
8. Conclusion
Some recent engineering systems, such as hybrid electric powertrains, produce mid-frequency excitations which canamplify the source mass and generate noise. Source mass motion control is thus needed to mitigate this noise, which can beachieved using active structural paths. The phase interaction (caused by passive system dynamics) between active mountsand the resulting system motion becomes more important as the frequency increases, and it may dictate the effectiveness ofactive control strategies (even at low frequencies).
The main contribution of this study is the derivation of a performance index L2 quantifying the active path interactiondue to passive system dynamics for a conceptual two path resonating source-path-receiver system. A closed form analyticalsolution is found for L2 by phase matching the left source mass motion ~ξ
z1ðtÞ with the two control force phases and assuming
the right source mass motion ~ξz2ðtÞ is also phase matched. This assumption leads to ~ξ
z2ðtÞ being reduced at some frequencies
and increased at others, depending on the passive system dynamics. In general, L2 is positive (desirable performance) belowthe first rigid body mode and negative (undesirable performance) beyond the fourth mode. Several interesting features arealso identified in L2: two peaks occur, creating a very desirable performance, and two valleys occur, creating a veryundesirable performance. Passive parameters dictating these features are identified, and corresponding key design valuesare calculated. The structural path (rubber) damping ηzm3 in particular is investigated, calculating transitional values beyondwhich the peaks and valleys are no longer observed. Also, ηzm3 can be selected to shift a peak to a heavily excited frequencyregime in the system (e.g. a motor operating speed) or alter a peak width to increase the bandwidth of desirableperformance. For the latter, lower damping is better. The external disturbance force moment arm d affects the first peakidentified, and a transitional value is calculated. The path interaction is more desirable when the disturbance force is awayfrom the center of mass, as the first peak is not observed when d is too low.
A minor, though necessary, contribution is experimentally demonstrating active source mass motion control ofa representative mid-frequency 400 Hz disturbance in a source-path-receiver system using active structural paths(piezoelectric stack actuators). Future work would require an application of real time control strategies for motion controlover a wider range of frequencies. Also, disturbances that are not pure sinusoids could be studied. Additional future work isto examine the interaction between two active structural paths for vibration isolation. Limited investigation shows thata similar performance index (say L4 referring to ~ξ
z4 ¼ ~ξ
zm2;g2) with similar features exists. This study could also be extended to
a three or four path system with various combinations of active and passive paths. Limitations not in the scope of this studyinclude material frequency dependence and nonlinearities, kinematic nonlinear effects, source and receiver flexural modeparticipation, rubber mount mass participation, and piezoelectric stack behavior complexities (e.g. hysteresis); these shouldbe investigated in the future.
Acknowledgment
We acknowledge the member organizations such as Hyundai Motor Company (R&D Division) of the Smart VehicleConcepts Center (www.SmartVehicleCenter.org) and the National Science Foundation Industry/University CooperativeResearch Centers program (www.nsf.gov/eng/iip/iucrc) for supporting this work.
Appendix A. Derivation of Eqs. (30) and (31) in Section 6.3
To analytically define det ð ~κ 0Þ ~H 023, ~κ
0 must first be represented symbolically. By substituting Eqs. (2)–(4) into Eq. (27),
~κ 0 ¼
~kzm1�0:5ω2m1
~kzm1�0:5ω2m1 � ~k
zm1 � ~k
zm1 0 0
0 0 � ~kzm3 � ~k
zm3
~kzm3þ ~k
zb1�0:5ω2m1
~kzm3þ ~k
zb1�0:5ω2m1
� ~kzm1 0 ~k
zm1þ ~k
zm3�ω2m3 0 � ~k
zm3 0
0 � ~kzm1 0 ~k
zm1þ ~k
zm3�ω2m3 0 � ~k
zm3
� ~kzm1ℓs� ω2I1
2ℓs
� �~kzm1ℓs� ω2I1
2ℓs
~kzm1ℓs � ~k
zm1ℓs 0 0
0 0 ~kzm3ℓs � ~k
zm3ℓs � ~k
zm3ℓsþ
~kzb1ℓ
2r
ℓs� ω2I1
2ℓs
� �~kzm3ℓsþ
~kzb1ℓ
2r
ℓs� ω2 I1
2ℓs
2666666666666664
3777777777777775
(A.1)

J. Liette et al. / Journal of Sound and Vibration 333 (2014) 2369–2385 2383
is derived where ℓs ¼ ℓs1 ¼ ℓs2, ℓr ¼ ℓr1 ¼ ℓr2, ~kzm2 ¼ ~k
zm1,
~kzm4 ¼ ~k
zm3,
~kzb2 ¼ ~k
zb1, m2 ¼m1, m4 ¼m3, and Iy2 ¼ Iy1 ¼ I1 have been
applied due to symmetry in the system. This is defined more compactly as
~κ 0 ¼
~κ 011 ~κ 011 ~κ 013 ~κ 013 0 00 0 ~κ 023 ~κ 023 ~κ 025 ~κ 025~κ 013 0 ~κ 033 0 ~κ 023 00 ~κ 013 0 ~κ 033 0 ~κ 023
� ~κ 052 ~κ 052 ~κ 053 � ~κ 053 0 00 0 � ~κ 023ℓs ~κ 023ℓs � ~κ 066 ~κ 066
26666666664
37777777775; (A.2)
taking advantage of any identical matrix components. In general, ~H0 ¼ ½ ~κ 0��1 ¼ CT=det ð ~κ 0Þ, where C is the matrix of cofactors.
Further, C32 ¼ ð�1Þ3þ2ℳ32 ¼ �ℳ32, where ℳ is a matrix minor. Thus, ~H023 ¼ C32=det ð ~κ 0Þ ¼ �ℳ32=det ð ~κ 0Þ. Subsisting in for
ℳ32 and removing the denominator dynamics results in
det
~κ 011 ~κ 013 ~κ 013 0 00 ~κ 023 ~κ 023 ~κ 025 ~κ 0250 0 ~κ 033 0 ~κ 023
� ~κ 052 ~κ 053 � ~κ 053 0 00 � ~κ 023ℓs ~κ 023ℓs � ~κ 066 ~κ 066
26666664
37777775
0BBBBBB@
1CCCCCCA
¼ �det ð ~κ 0Þ ~H 023: (A.3)
The left hand side of Eq. (32) is expanded, but the process is tedious and omitted for the sake of brevity. Eventually, acomplex valued function
~Λ ¼ det ð ~κ 0Þ ~H 023
4ℓ2s
m1m3I1ðℓ2s m1� I1Þ
!(A.4)
is derived, where several constant terms have been moved from the left hand side of Eq. (A.4) to the right hand side. Still,~Λ retains the ~H
032 numerator dynamics and is further defined as
~Λ ¼ ~Aλλ4� ~Bλλ
3þ ~C λλ2� ~Dλλþ ~Eλ (A.5)
where λ¼ω2 and ~Aλ, ~Bλ, ~C λ, ~Dλ, and ~Eλ are all complex valued constants in terms of ℓs, ℓr , Iyj , mj, ~k
zmi, and
~kzbi. Eq. (A.5) is used
to define Eqs. (30) and (31) in Section 6.1. The real valued constant coefficients in Eq. (30) are expressed as
Im f ~Aλg ¼ kzm1ηzm1; (A.6)
Im f ~Bλg ¼ ℓ2s
ðI1�ℓ2s m1Þ
kzm1
kzm1αB1ð2ηzm1Þ
þkzb1αB2ðηzm1þηzb1Þ
þkzm3αB3ðηzm1þηzm3Þ
0BB@
1CCA; (A.7)
Im f ~C λg ¼2ℓ2
s ℓ2r
ðI1�ℓ2s m1Þ2
kzm1
ðkzm3Þ2αC1ðηzm1þ2ηzm3�ηzm1ðηzm3Þ2Þþkzm1k
zb1α
C2ð2ηzm1þηzb1�ðηzm1Þ2ηzb1Þ
þðkzb1Þ2αC3ðηzm1þ2ηzb1�ηzm1ðηzb1Þ2Þþkzm1k
zm3α
C4ð2ηzm1þηzm3�ðηzm1Þ2ηzm3Þ
þkzm3kzb1α
C5ðηzm1þηzm3þηzb1�ηzm1η
zm3η
zb1Þ
0BBBBBBBB@
1CCCCCCCCA; (A.8)
Im f ~Dλg ¼4ℓ4
s ℓ2r
ðI1�ℓ2s m1Þ3
m1
m3kzm1
ðkzm3Þ2kzb1αD1 ðηzm1þηzm3ð2�ηzm1ηzm3�2ηzm1η
zb1�ηzm3η
zb1Þþηzb1Þ
þ4kzm1ðkzm3Þ2αD2 ðηzm1þηzm3ð1�ðηzm1Þ2�ηzm1ηzm3ÞÞ
þkzm3ðkzb1Þ2αD2 ðηzm1þηzm3þηzb1ð2�2ηzm1ηzm3�ηzm1η
zb1�ηzm3η
zb1ÞÞ
þ2kzm1ðkzb1Þ2αD2 ðηzm1þηzb1ð1�ðηzm1Þ2�ηzm1ηzb1ÞÞ
þkzm1kzm3k
zb1α
D3 ðηzm1ð2�ηzm1η
zm3�ηzm1η
zb1�2ηzm3η
zb1Þþηzm3þηzb1Þ
0BBBBBBBB@
1CCCCCCCCA; (A.9)
Im f ~Eλg ¼8ℓ6
s ℓ2r
ðI1�ℓ2s m1Þ4
m1
m3ðkzm1Þ2ðkzm3Þ2kzb1αE1
ðηzm3Þ2ððηzm1Þ2ηzb1�2ηzm1�ηzb1Þþ2ηzm3ð1�ðηzm1Þ2�2ηzm1η
zb1Þ
þð2ηzm1þηzb1�ðηzm1Þ2ηzb1Þ
0BB@
1CCA; (A.10)
where αBn are constants in ~Bλ, αCn are constants in ~C λ, αDn are constants in ~Dλ, and αE1 is a constant in ~Eλ. These constants are
αB1 ¼I1
ℓ2s m3
� m1
m3; (A.11)

J. Liette et al. / Journal of Sound and Vibration 333 (2014) 2369–23852384
αB2 ¼ 2I1
ℓ2s m1
þ ℓ2r
ℓ2s
�1� ℓ2r m1
I1
!; (A.12)
αB3 ¼ 2I1
ℓ2s m1
þ I1ℓ2s m3
� 2ℓ2s m1
I1� m1
m3; (A.13)
αC1 ¼I21
ℓ2s ℓ
2r m1m3
þ2I1
ℓ2r m1
� I1ℓ2r m3
þ2ℓ2s
ℓ2r
ℓ2s m1
I1þ ℓ2
s
ℓ2r
m1
m3
ℓ2s m1
I1�4
ℓ2s
ℓ2r
� ℓ2s
ℓ2r
m1
m3; (A.14)
αC2 ¼I21
ℓ2s ℓ
2r m1m3
�2I1
ℓ2r m3
þ I1ℓ2s m3
þ m1
m3
ℓ2s m1
I1þ ℓ2
s
ℓ2r
m1
m3�2
m1
m3; (A.15)
αC3 ¼ 2I1
ℓ2s m1
þ ℓ2s m1
I1�2
!; (A.16)
αC4 ¼I21
ℓ2s ℓ
2r m1m3
þ ℓ2s
ℓ2r
m1
m3
ℓ2s m1
I1� I1
ℓ2r m3
� ℓ2s
ℓ2r
m1
m3; (A.17)
αC5 ¼2I1ℓ2s m1
1þ m1
2m3þ ℓ2
s
ℓ2r
� ℓ2s
ℓ2r
m1
m3
!þ I21
ℓ2s ℓ
2r m1m3
þ 2ℓ2s m1
I1
ℓ2s
ℓ2r
þ1þ m1
2m3
!þ ℓ2
s
ℓ2r
m1
m3�2 2
ℓ2s
ℓ2r
þ m1
m3þ2
!; (A.18)
αD1 ¼ I21ℓ2s ℓ
2s m1m1
�2I1
ℓ2s m1
þ1� I1ℓ2r m1
þ2ℓ2s
ℓ2r
� ℓ2s
ℓ2r
ℓ2s m1
I1; (A.19)
αD2 ¼ I21ℓ2s ℓ
2s m1m1
�3I1
ℓ2s m1
þ3� ℓ2s m1
I1; (A.20)
αD3 ¼ 1þ ℓ2s
ℓ2r
!I21
ℓ2s ℓ
2s m1m1
�3I1
ℓ2s m1
þ3� ℓ2s m1
I1
!; (A.21)
αE1 ¼I21
ℓ2s ℓ
2s m1m1
� I21ℓ2s ℓ
2r m1m1
þ3I1
ℓ2r m1
�3I1
ℓ2s m1
þ ℓ2s
ℓ2r
ℓ2s m1
I1� ℓ2
s m1
I1þ3�3
ℓ2s
ℓ2r
(A.22)
The real valued constant coefficients in Eq. (31) are defined as
Aη ¼2ℓ2
s ℓ2r
ðI1�ℓ2s m1Þ2
kzm1ðkzm3Þ2�λ2t α
C1þ ℓ2s
ðI1 �ℓ2s m1Þ
m1m3
λtðkzb1αD1 ð1�ηzm1ηzb1Þþ2kzm1α
D2 ð1�ðηzm1Þ2ÞÞ
þ 4ℓ4sðI1 �ℓ2
s m1Þ2m1m3
kzm1kzb1α
E1ððηzm1Þ2þ2ηzm1η
zb1�1Þ
0B@
1CA; (A.23)
Bη ¼ℓ2s
ðI1�ℓ2s m1Þ
kzm1kzm3
λ3t αB3η
zm1� 2ℓ2
r
ðI1 �ℓ2s m1Þλ2t ð2kzm3α
C1η
zm1þ2kzm1α
C4η
zm1þkzb1α
C5ðηzm1þηzb1ÞÞ
þ 4ℓ2s ℓ2r
ðI1 �ℓ2s m1Þ2
m1m3
λt2kzm3k
zb1α
D1 ðηzm1þηzb1Þþðkzb1Þ2αD2 ðηzm1þ2ηzb1�ηzm1ðηzb1Þ2Þ
þ8kzm1kzm3α
D2η
zm1þkzm1k
zb1α
D3 ð2ηzm1þηzb1�ðηzm1Þ2ηzb1Þ
0@
1A
þ 16ℓ4s ℓ
2r
ðI1 �ℓ2s m1Þ3
m1m3
kzm1kzm3k
zb1α
E1ððηzm1Þ2ηzb1�2ηzm1�ηzb1Þ
0BBBBBBBB@
1CCCCCCCCA; (A.24)

J. Liette et al. / Journal of Sound and Vibration 333 (2014) 2369–2385 2385
Cη ¼ kzm1
λ4t þ ℓ2sðI1 �ℓ2
s m1Þλ3t
kzm1αB1ððηzm1Þ2�1Þ
þkzb1αB2ðηzm1η
zb1�1Þ
�kzm3αB3
0BB@
1CCAþ 2ℓ2
s ℓ2r
ðI1 �ℓ2s m1Þ2λ2t
ðkzm3Þ2αC1þkzm1kzb1α
C2ð1�ðηzm1Þ2�2ηzm1η
zb1Þ
þðkzb1Þ2αC3ð1�2ηzm1ηzb1�ðηzb1Þ2Þ
þkzm1kzm3α
C4ð1�ðηzm1Þ2Þ
þkzm3kzb1α
C5ð1�ηzm1η
zb1Þ
0BBBBB@
1CCCCCA
þ 4ℓ4s ℓ
2r
ðI1 �ℓ2s m1Þ3m1m3
λt
ðkzm3Þ2kzb1αD1 ðηzm1ηzb1�1Þþ2kzm1ðkzm3Þ2αD2 ððηzm1Þ2�1Þ
þkzm3ðkzb1Þ2αD2 ð2ηzm1ηzb1þðηzb1Þ2�1Þ
þkzm1ðkzb1Þ2αD2 ððηzm1Þ2þ4ηzm1ηzb1þðηzb1Þ2�ðηzm1Þ2ðηzb1Þ2�1Þ
þkzm1kzm3k
zb1α
D3 ððηzm1Þ2þ2ηzm1η
zb1�1Þ
0BBBBB@
1CCCCCA
þ 8ℓ6s ℓ
2r
ðI1 �ℓ2s m1Þ4m1m3
kzm1ðkzm3Þ2kzb1αE1ð1�ðηzm1Þ2�2ηzm1ηzb1Þ
0BBBBBBBBBBBBBBBBBBBBB@
1CCCCCCCCCCCCCCCCCCCCCA
(A.25)
References
[1] M. Serrand, S.J. Elliott, Multichannel feedback control of the isolation of base-excited vibration, Journal of Sound and Vibration 234 (4) (2000) 681–704.[2] X. Huang, S.J. Elliott, M.J. Brennan, Active isolation of a flexible structure from base vibration, Journal of Sound and Vibration 263 (2003) 357–376.[3] T.J. Yang, Z.J. Suai, Y. Sun, M.G. Shu, Y.H. Xiao, X.G. Liu, J.T. Du, G.Y. Jin, Z.G. Liu, Active vibration isolation system for a diesel engine, Noise Control
Engineering Journal 60 (3) (2012) 267–282.[4] P. Gardonio, S.J. Elliott, Passive and active isolation of structural vibration transmission between two plates connected by a set of mounts, Journal of
Sound and Vibration 237 (3) (2000) 483–511.[5] S.M. Kim, S.J. Elliott, M.J. Brennan, Decentralised control for multichannel active vibration isolation, IEEE Transactions on Control Systems Technology 9
(1) (2001) 93–100.[6] P. Gardonio, S.J. Elliott, R.J. Pinnington, Active isolation of structural vibration on a multiple-degree-of-freedom system, part II: effectiveness of active
control strategies, Journal of Sound and Vibration 207 (1) (1997) 95–121.[7] P. Gardonio, S.J. Elliott, R.J. Pinnington, Active isolation of structural vibration on a multiple-degree-of-freedom system, part I: the dynamics of the
system, Journal of Sound and Vibration 207 (1) (1997) 61–93.[8] B. Kim, G.N. Washington, R. Singh, Control of modulated vibration using and enhanced adaptive filtering algorithm based on model-based approach,
Journal of Sound and Vibration 331 (2012) 4101–4114, http://dx.doi.org/10.1016/j.jsv.2012-04-007.[9] B. Kim, G.N. Washington, R. Singh, Control of incommensurate sinusoids using enhanced adaptive filtering algorithm based on sliding mode approach,
Journal of Vibration and Control 19 (8) (2012) 1265–1280, http://dx.doi.org/10.1177/10775466312444659.[10] G. Pinte, S. Devos, B. Stallaert, W. Symens, J. Swevers, P. Sas, A piezo-based bearing for the active structural acoustic control of rotating machinery,
Journal of Sound and Vibration 329 (2010) 1235–1253, http://dx.doi.org/10.1016/j.jsv.2009.10.036.[11] S.J. Elliott, Active control of structure-borne noise, Journal of Sound and Vibration 177 (5) (1994) 651–673.[12] Z.J. Geng, L.S. Haynes, Six degree-of-freedom active vibration control using the Stewart platforms, IEEE Transactions on Control Systems Technology 2 (1)
(1994) 45–53.[13] A. Preumont, M. Horodinca, I. Romanescu, B. de Marneffe, M. Avraam, A. Deraemaeker, F. Bossens, A. Abu Hanieh, A six-axis single-stage active
vibration isolator based on Stewart platform, Journal of Sound and Vibration 300 (2007) 644–661, http://dx.doi.org/10.1016/j.jsv.2006.07.050.[14] E. Bianchini, Active vibration control of automotive like panels, SAE paper 2008-36-0576, 2008.[15] K. Wolff, H.-P. Lahey, C. Nussmann, J. Nehl, R. Wimmel, H Siebald, H. Fehren, M. Redaelli, A. Naake, Active noise cancellation at powertrain oil pan, SAE
paper 2007-01-2422, 2007.[16] J.P. Carneal, C.R. Fuller, An analytical and experimental investigation of active structural acoustic control of noise transmission through double panel
systems, Journal of Sound and Vibration 272 (2004) 749–771, http://dx.doi.org/10.1016/S0022-460X(03)00418-8.[17] C.R. Fuller, Experiments on active control of sound radiation from a panel using a piezoceramic actuator, Journal of Sound and Vibration 150 (2) (1991)
179–190.[18] C.R. Fuller, Active control of sound radiation from a vibrating rectangular panel by sound sources and vibration inputs: an experimental comparison,
Journal of Sound and Vibration 145 (2) (1991) 195–215.[19] A. Inoue, R. Singh, G.A. Fernandes, Absolute and relative path measures in a discrete system by using two analytical methods, Journal of Sound and
Vibration 313 (2008) 696–722, http://dx.doi.org/10.1016/j.jsv.2007.09.058.[20] S. Kim, R. Singh, Multi-dimensional characterization of vibration isolators over a wide range of frequencies, Journal of Sound and Vibration 245 (5)
(2001) 877–913, http://dx.doi.org/10.1006/jsvi.2001.3617.[21] S.W. Kung, R. Singh, Vibration analysis of beams with multiple constrained layer damping patches, Journal of Sound and Vibration 212 (5) (1998)
781–805.[22] S.W. Kung, R. Singh, Development of approximate methods for the analysis of patch damping concepts, Journal of Sound and Vibration 219 (5) (1999)
785–812.[23] E.E. Ungar, C.W. Dietrich, High-frequency vibration isolation, Journal of Sound and Vibration 4 (2) (1966) 224–241.[24] J.C. Snowdon, The reduction of structure-borne noise, Acustica 2 (Beiheft 1) (1956) 118.[25] PCB, PCB Piezotronics, PCB Group, Inc., Depew, NY, USA, 2013, ⟨http://www.pcb.com/⟩ (accessed 19.07.13).[26] M.J. Beard, A.H. Von Flotow, D.W. Schubert, A practical product implementation of an active/passive vibration isolation system, Proceedings of IUTAM
Symposium on the Active Control of Vibration, University of Bath, UK, 1994, pp. 101–108.[27] dSPACE, dSPACE systems, dSPACE Inc., Wixom, MI, USA, 2013, ⟨http://www.dspace.com/en/ pub/home/products/systems.cfm⟩ (accessed 19.07.13).[28] Ling Electronics, Ling Electronics Acquired by Data Physics, San Jose, CA, USA, 2013, ⟨http://www.derritron.com/⟩ (accessed 24.7.13).[29] SolidWorks. Dassault Systèmes SolidWorks Corporation, Waltham, MA, USA, 2013, ⟨http://www.solidworks.com/⟩ (accessed 19.07.13).[30] MathWorks, Simulink, simulation and model-based design, MathWorks, Natick, MA, USA, 2013, ⟨http://www.mathworks.com/products/simulink/⟩
(accessed 19.07.13).[31] J.-Y. Yoon, R. Singh, Dynamic force transmitted by hydraulic mount: estimation in frequency domain using motion and/or pressure measurements and
quasi-linear models, Noise Control Engineering Journal 58 (4) (2010) 403–419.