CS305: Fall2008 Mental and Conceptual Models Readings: Chapter 2 of ID-Book.



Journal�of�Control,�2008,�V.2,�N.1� ������ ��1387 � �2 ����� �1�
�
�
������
1� ������� ��� �� ��� ����!" #�� ��$�� ������%& '���()��* +,��-.���/0 ��0�$ ��� �45�6 , ���� �ANFIS
9,� �� �� ����� ��:��" �����$ '��PSO ���� '���& '�;���<$ ��=� ��!����0 �& �>!?(�@�
�
20� B�.� �� '�$��-��� '�� ���� �� �C��D$ ���( ��E�':�5 F�E�. G��! ,��� ���5 '��(��0 ���.�
�
26� ':�E!�� ���I(� '��� J����$ �D0��K ����� , B�.� �� +"�L!���� �5��%$ M��;� ����5�
����:�!�0 ���6�N�O '���� ��PE��
�
40� ��.��� , ��EE� ��(�C$ '�����( �����$ 9,� /.�$ ����. �����$ ':�5 ����� �����0 �6��R ��S ���� �& ����� ��=� ��E(,�
�
49� >�& U�V<$ W; ����E�. ���;� ���(� ���0���N J���� ���� '�X@ ���N �'�� ,�E0 ��� ��=��
�
56� IN�! Z+�E�� ����" F�E�. �C��D$ �����- �!- J* �(�D& ��=� �����<5 ��� WC�C6 :��(�5�
�
65� ����& +��� ���;� , B��P� ��$����. \6 '��� �(� 9,� �]��� � �� �� ���� ���N��� '��,:�� /.�$ )�� '��:"���N^ F�(��L!�
�(�X@ \�!� _�. ���N:��� ����5�
�

Journal�of�Control,�2008,�V.2,�N.1� ������ ��1387 � �2 ����� �1�
�
��� �� ��� � ��& '�– �:�$ ��N������� �� W.� �<�,`� �.��;� �� /�$�� _�V� a�& �� '������ , '�4N #�C�C=$ b(��N J(�$�� ?�S� ��I�� , ��������� .�� �� J(� �4N ���� d6��� +��� :����N ����� �(: ����� �� +��$:
1(���� ��(�.��� �':�E!����;�� , ':�.':�. F�E�.��.�2(F�E�. �6��R , \�=$F�E�. +�g�� ��5�<�� ����� '��F�E�. ��D0��K , �D0 ����� '�� � ���;� , a,�C� ��C��D$ ����� '��
F�E�.F�E�. ������� ����� '��F�E�. ��5��%$ ����� '��F�E�. ������$ , ���<�� ��EE� ����� '��h�., ��P�� '��.�3(��$��� , ��N,�$���.�4(��F�E�. , ?�S� ��I'��E�. #�&iR� , ���� >���$ '��.�5(F�E�. +�g�� ��P�@ ���.���$� +�EN� /��� �����E� ����� '��– F�E�. �J����F�E�. ��D0 U�V<$ , ���(� '�� +��: '��
F�E�. , �C�C6'�I(�,���. ����� '��.��� , ���� h�., ��� J(� �Si& ���� '��������������� �N��$�5 j��N� ��N����� ����( .�� +��� +" :����N ����� �(: ����� �� +��$:
1(F�E�.'��,�N , W(��� '���
2('^�!���$��� , �(����� '����(��5 \��� ��P�@ '����(��5.�3(�N�P� ����� '�,��5 , k��V�.� '����(��5.�4(F�E�.�����0 '��,���0 , \CN , \�6 '��.�5(l�� ',��N h(:�$ , ��!�$.�6(��;��.������ , WE(: /�=� �..�7(��!�$ '^�!���$ �.��;�.�8(F�E�.�!�� , '��%�S� '��.�9(F�E�.���� , �$����V� ��$�&iR� '����P�@ '��.�
10(���I� �.��;�.�11(F�E�.������ 9:��" '��.�
����: �� ��P5 +�.������ , +��L<�,`� ��� :��� \�P� #�&� ?�S� ��I�� , ����� �.��;� �� /�$�� '�� J(�0" b(��N , #)�C� �$ �("�� J(� �� �� ��0 �<�,`� , ��& '����,��.� ��(��N ��.�� . B��" �� ���N,���!� #��@ �� �� ��0 #)�C� W.� ���<���0
[email protected] ��(���5 ��.�� .�� #)�C� ��.�� , ��;$ ��=N W5�(�� , ��<�� #�&iR� >E� '���� �LN�0 �=X@ �� ��N��$ �� �B��" :www.isice.ir ��(��N �P ���.

��� �� � 1387 � �2 ����� �1 �=X@ �19-1
Journal of Control, 2008, � Iranian Society of Instrument & Control Engineers http://www.isice.ir ������ ��1387S� ��I�� , ����� +�.��;� J�N� ��+��(� ?
��� ���� ������� �� �� ��� ��!�"# $%���&' (�� �)*%+ ,-��.��� /01 ��1�� 2�! �3��4 - ���� /ANFIS 5-2 ���� ���� ��6��# ����� (��PSO
���� '���& '�;��!� ���<$ ��=����0 �& �>!?(�@ l�� ���<N�� ��L<N��� ��0 ��P�@J(�!���%N�.�R
[email protected], [email protected], [email protected] _____________________________________________________________
�%��+: ���� �!�C� J(� ���:�� �� , �N��: '�;(�. #��@ �� �� ��� ����!" '���&�. F�N '��� ������ ��� �� �� ����� '��+,��-.�� ��%& ) ��*��( �45�6��0�$ ��� ��%& ���� , ���� �– ':�5ANFIS �� +" 9:��"�� J(�N , �����$ ��,� ����� ��
#��m ��,�� ':�. ���;� F�(��L!� B�.� �� +�(���� :� ��:" ��,� ����� �����F(���N ���� .��� '������� ������� ����� I�!�N" ��������� '�(n� ���� , ��0���� ��� ������ �� '��l�5��� �� a��S� ��n!���� ����!" ���� J(� W(�;N �� , F(���N �,�'�;
�E(�C� F� �� �� ������ B�.� �� �����$ '��;�<�� 9,� F(��� +�<N , F(���PSO ���� 9:��" '��� J�!�� ���5 ,ANFIS ��� ����& ���;� �� ��.��� �(�N��$W.���� ����.
�^�, '��� '��: : �() ��* +,��-.�� ��%& '�� ����– �N��: '�;(�.– ��� ����!"– ��0�$ /0 �45�6 - ���� ��%& ���� - ANFIS – ��5�( �P.�$ J�!�� ���5 , #��m ��,�� ':�. ���;�.
Abstract: In this study we predict air pollution data by using Multi Layer Percepteron, Time Delay Line, Gamma and ANFIS by gradient free learning methods. This paper, using real data for Arak city during Oct 2003, the following pollution parameters are analysed: Co (Carbon Monoxide), PM10 (Particulate Matter). This analysis is carried out in two stages: Predictability analysis using Lyapanov, Exponent, Correlation Dimension and Rescaled Range Analysis (R/S), Prediction using Multi layer perceptron, Time delay line, Gamma and ANFIS. Also, a comparative study is performed using the different methods employed and prediction results are provided to show the effectiveness of the predictions. Keywords: Multi Layer Percepteron Neural Networks, Time Series, Air Pollution, Time Delay Memory, Gamma Neural Network, ANFIS, Particle Swarm Optimization, and Extended Kalman Filter.
______________________________________________________________________ 1 .��%9�
\���& :� '���E� �� ��E��, �� ���� ���g�� ���E� ��("�5 �( ��� ����!"�� ����� ��� J(������ ���� �oN�L�(� �o��� �o����(� '���� �o� �o� �oD0 �o�K
���E�� ���� ��<�N� , �������� �LN�L* ��E(�� , W.� \�<����E����()" ���N UV<� � �� ��� >D� J(� �� I�N ��(I� '�� �o���0 �� �o5�I� ���E�
W���� ���� J(� ��� �� G-. '���o�("�5 ��oN������� #)��oP� \o6 , ������ #��@ �� '� ���� '�� �V� �� '��� ':�E!�� �� a��S� '���� . \��S
��o� ����oN��� �Wo��R� ���o<5 ��o�� +�g�� '� \���& #���Op$ W.� ��m�oo<CN , #)��ooP� Joo(� J�ooV(� F��oo� doo&�� ��oo�K, ���oo� �� ��oo� �oo�;$ '�oo�
�� ����� ���!" ���� �������� �LN�L* ��� . '� \���& J(� ��� �� :� , ':�.�;� '���P� �,���0 �N�;��N #���!�$ �(�I5� ��� ��5�� �4N �� I�N J�o� :� ��o� ��5�� �4N �� ��� +" �� �� ����0 d&�� �L(� \���& '���E�
�I(�� F� �� , �,�� ]1 �2[.
'�;�,� a�o.�� �o.������ +��:�o. �� �:,�o�� �� ���� ��� �� �,�����<CN ',� �� �.��� , d=� '���� �� W.� /o.�$ ��o� �o�;$ ���o( ��o� '��
���� '���� �� I���� #��@ �� �� �(�;��L�E(� ��N��� ����: '�;��L�E(� '���� ���S a��& jiR� W; ��" , W5� �� ?R��� �� �!���(� �(��N ��N��� ,
������� '�;��L�E(� �� ���K , '� ���� .���� J(� G-. ���5� '�E�( /.�$ �� ��o� ����o!" �o��� ��o� �o� a��S� , ��5�� ���S ���X�.� ���� ���$ �� , ���0
�� �o� �� ��o�& �o$����(� q�oPDS +" '��o=� +�oEN� \�!� �� 9,� J(� �� ���� o��� ��� '�D0 +" �� �,i& , W��� ����0 ����� �()�o� ���oE� �o���� Io�N �
����. �P. �!�C� J(� �� �� #��N J(� �� � �$ �� F(��o�N ��o�P� �o.��� �o� ��o���
���oE� �N�o�: '�. #��@ �� �� �� ���� J(� #��@�%0 �.��� '��� �(���N" G-. , F(:���-������ �� � ��;* ���� j�N������ ���F��� ����.
�S ���X�.� ���� �� �(�� ���� ����� ��� �� r��� �;� �� s ���� ���5�� ��2001 '����o� �oN��N W&�o. F�oN � W&�. F�N #��@ �� �� ��� �� '�i��

������� ��� �� ��� ����!" #�� ��$�� ������%& '�� �()��* +,��-.�� �/0 ��0�$ ��� �45�6 �...
2 ���� '���& '�;��!� ���<$ ��=����0 �& �>!?(�@
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
�oN� ���. ��o� '����o� �oN��N '�o� ���� �o( ���o!" #��m ?oP� PM-10 , J��� ��E����CO ����� ��. �6�, �� W.���m \��S #��m '����o� �N��N
?P� 3g
m� J��� ��E���� , ppm1 ������.
��X� '��� ���� �� ?P� �( ���!" #��m �� ��CP� ��� �� �� ��� ) J(��� I�N h(�� #��@ �� #��m ����� ��N��$.( ��o�$ d&�� q)��P� #��m �N�� J(�
�;o� '��o� ����� ��<�� #��m J(� ���C� �*�� , ��� �;� '��� +�� uN����!" N �� �$�� �4 �.� .�� ���h ]1 �4[ ��Opo$ �LN�oL* +�o����� \�%X$ ��
��N vn �� ���()" J(� +" #��w� �L(� , W.� ��� W�=@. ?P� #��m �o� ?P� ��� �� ��� ��* �$ ��N�O ��* J�� q)��P� �oN�� . Jo(� #��o��x$ �J(����o��
���� �����(� '���� +��: �� ��'� ���g�� �o� �o<� :� �o�( , �o��� J(�o$ \���� J(� �� s���� �� ���� ��� �� �� ����.
, �� �uN� +,�� ':�� J�����E���� W.� FPR . J��o� ��oE���� +�I�� +�; �� �&�%��350 �o� ��: J�o�V$ ��o. �� J$ +���� �o� ��o�20 % +"
��0�oo. /oo.�$ �oo� �oo�!�$ �oo<� Woo.� '�oo� �N��!�oo. >oo�$�$ J(�oo� , �ooN���ppm0.03 W4K ��CO ,I5��� �� ��� . Jo(� ��(� >�. �� J��� ��E����
�Do.��� +�o� '�o� Wo5�� :�o�N ���� +`�E�� ��;$ �� �i�0� ��(� d&�� ���N J���o���� �E����� \��<$ , +`�E�� \�6 �� J������� #��S ����
�� �O� 'I��� v�%&� �E. ',� �� ��o�()" J(� :� ���N #���@ �����n�W.� �N�E� � ��� ��<�� �oEXS J(`N" z�%V� �S,�& , ��S '�;(����� ��
�N��� '��@. �� ���o� do&�� :�� J(� ')�� W4K {�P� �� J�5�� ���SW�!�P5 a�N� , '�����( W���S �'��� +��$ ��(���� WS� �� ����� '�� ���.
��� �l�5 ����� �� � �$ �� ��oE(�� �o� Wo.� F;� �$�,�| ��� ����!" ����S � �$ �������� ��� .��� J(� �*��?�S� ���� #��D0 :� , ��(n� #��@ �$�� ����!"W.�� +��$ . �V� �� �!�C� J(� ����� ��2 ��o� do=�� �o� �o���
�� +" #��,I� , �N��: '�;(�.��� '��� �� �(�;�,� , F(:���� �o�X� ������ �.��� �� ���E�F�(��N . �V� ��3 �������� '���P� , ��%& '�� '��
��� F����0 �.��� �� �4N �� . �oV� ��4 ���o� �o�ANFIS �LN�oL* , +��o�& �o� ���o� ��o��& ��o�;� '��o� �(� �����$ '�;�,� , +" 9:��"
��� �V� �� ��0���� J��5 F�(��oL!� ���o� �� '�o%�V� }�o|�$ ��PSO ���o� �0" �V� �� W(�;N�� , F��0���� ���o� '�����o�� �o� �� ':�o. '�o�
5�P�F(��� a�N� ��� �.
3 Particle per million
2 .�<��6 (�� (�� ��� ��� q�6iDo@� �� +�o�: ��oR �� #����<� :� '� ���� +��� ���S F� �. W<�
�N��: '�.2 +�o�� '��o& �( , '����� '�� #��@ �� �N��$ �� �� �����N �� ���]12[ .
���� �� �N��: '�;(�. \�=$ , �(I$ �o� s�o��� �(�� \C�oE� �o� �N�o�����N ��oE��, F� �� �!���� ��R �� , ��o(�� �o.��� '��o� , �oN� ��o� �o� �(�o�
�� �� F�oE�. �o ,�0 F�N��o�� �o� q�5�@ , �����N ���&� \��S '�,�, �� �N,� F�o��� �����N �(�N��$ ~�� +" '�,�, ',� , F��� �.��� , F�����. Wo!�6 ��'�� �D0 ��K +�g�� �@��0 �N��$ �� �N��: '�. �( ��3 �����"4 �
'����E(� ��K5 '�� �%5 ��N��� ��,��$ ,6 Wo.� Jo��� ��6 , ���� ����� ���� F� 'I(�N]12[ .
, �oN�� '�o� �:�o6 :� '���oE� �� ��;� �CN �N��: '�;(�. ���� ������� �.��;� . '�,�, �o�� �o� +��o$ �o� �� W!�6 ��- �o ,�0) �o�P
���. (N ���� ��� , \�=$ �� �(�;���. J��* , ��o�n� ��o� '�,�, �o� ��� ���oE� �N�o�: '�o. ��o�(" Io�N +" �o ,�0 , F�oE�. ��6]13[ . ���o� ��
���� J�oo� �L�ooE��, �N�oo�: '�;(�oo. l�oo5 Woo���� :� '�oo. �oo� '�oo� ���ooP!� '� ���� z�o%�0� ��0 �� �� ��& '���" d6��� :� '���E� �� W.� �����0��
W.� .���� J(� ':�E!�� $�L�$ s��$�� �� �� ���� J�o� �L�oE��, �� �L� ���� �o�����: �� �� �L�� �� ��� ����!" �$ '��%�S� '����("�5 :� �P�., ���E� '���� ��� �,�. �(��oC� �o� �N�o�: '�o. �o( �!��o�� '�o� �N��N �� W!�6 ��
W.� ��E��, ��0 ���n� . ���� J�� �L�E��, �.��� �@� '�������� :� ��( ��� �� �� , ����
��� �� �� ���� +��� �(n� ���� ���� .��� '��� hS�, �� W���� �(�� �������� ���L� ���S �.��� ���� �� .���� W���� J(� �� ��3 r�����" ��PDS ��.�
�� F�EC$ �5��%$ , �N��. ��o� , ':�oE!�� ���o. �� �� +" :� ��� >oD� J(�o��;� �F(,�o� �o���
���� j�N �.��� �o� �� �o��� . �o�� +�o* ���� q�oPDS �o��� ��Xo. I(�oN �o� '�o���� �N�Lg�� ��N ���� ��� #��@ �;N" ',� +��$ . �o��� �N��:" �(�� J(������
�o��x$ \o�=$ +�o�:" +���& �� +" :� �� ���� W�PS�, J(� ����� UV<� �� #����x$ �:�6 '����) \�=$(R/S7 �� ���� a�N ��� . Wo(I� WoE$ Jo(� �o��!���6 ���� �� '�L(� ���� ���oP$ \S ��o� Wo; a:) '�o� �o� �o� Io�N �� �o���
�� ��� . ���� j�oN F����� ��E(�� F;� �����5 J(� +�� UV<� :� G� �o� '�o����� j�N :� ��4�� �W.� �N�L* �� �;N" ����g�� +�I�� �� +��:" :� �� ����
�L�E����P� J��V$8 �o* �o$ �o� F����� ��E(�� W(�;N �� , W.� ��� ���X�.�
Time Series4
Nonlinearity5
Chaotic6
Nonstationary7
Seasonality8
Rescaled Range Analysis9
Correlation Dimension10
������� ��� �� ��� ����!" #�� ��$�� ������%& '�� �()��* +,��-.�� �/0 ��0�$ ��� �45�6 �...
���� '���& '�;��!� ���<$ ��=����0 �& �>!?(�@ 3
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
���� ',� �C5� ��� +��$ �� �� �� �(" ���� #��@ ���� ��o� +��o$ �o�� �o��� ��N����! '��N +��:" :� �� ��0 �( ��� #��@ #��1 �� ���X�.� F���.
���;��' )1 (, )2 ( �o�V(� Fo;� , �o@� '�o. ,� '��o�) �o�� �(�o ���� �5��%$ #��@ �� �� (�� �� ��DN��� �W.� ��� F�.�$ F���� '�. '���
�� �@� '�. :� ���� ��V(� F;� ����� ���� G� ��o� \��S �� , ���oE� �o�����N ��X. I(�N ��o��� . ���oC� �o*��H +��o� �5��o%$ +�Io�� ��o��� �o���I�
���� �(��C� J(��<�� , W.� ���� ��H ,HN U�V<$ W; v,�o�$ ��,�W.� ���" �������N�� I�N �L!�. �o� H �LN�o�� Wo.�� '�o�N ,HN ��o�P�
) \�=$(R/S 9��o� ��,� J�LN�o�� �+" ���oC� J(��o<�� �o�� �o� �� W.��� W.�� ��� v,���� �(".
o� �� '�o� ���� �o� +" �oE(�C� , �L�oE��� �P� +��:" ���&� �� �o�V(� F�� ����<� �o� ��oL�� �o( :� �o���I� '�(��C� W�. �� ����� �o�P( ��o�
�o� '�o. Jo(� �oE(�C� F;� ���N ��� ����� �N�L���" z��0 �@� �N��: '�. ��o<�� �LN�L��o�" '���� �o�V(� Fo� �� '�o. �� �W.� ��V(� F��� '�. J�oo� �L�ooE��� a�oo& \oo�!� �oo� �LN�L��oo�" �(�Ioo5� Joo(� �oo� �Woo.�
���� oo��(�) �oo�V(� Foo� �� '�oo. (�oo� �oo��� . :� J�oo�g�� '�;�oo�)3 ( ,)4)( �����N4 ��oE(�� ��o=� �o� W�oEN �L�E��� �P� +��� �X�� a�& � �$ ��
��o� ��5�� �4N �� +" ?D� ��S ��;� #���& �� �( ��� ��=! +��C��( �o ����� ���� �� F(�� ���EN r�����" z��0 �� o� ������o�" J(� , �N��� _�P| �
�� ��x�� +��: �� � �$ ���� . ��N����! '��N Wo��� ���oC� ��(��R �� W.� �N��: '�. W���� �LN��� '�o�N
��N����! ���oC� , ��� ����0 ����, ���� ��� , ��("�5 +��� r�����" �LN����X�� ��N����! '��N �o�� '��o� �o�6 �o��� ��� \��S , UV<� W���� �LN���
�� #�� ���� .��� ��N��N����! ' F�oE�. ��(n-� �� �X@ �(�IN W��� �(��C� ��o� �o�� �Wo.� �(n� +���� #�� ��$�� ���� ��� , W.� _�P| r�����"
W.� J��� ��K #�� ��� ���� . ���� �o� s�o��� ��N����! '��N '�;(�o. '�o���'�;�� )5 ( �$)6( Wo.� ��o� F.� '�������N �� � �$ �� �W.� ��� F.�
��N����! '��N ��o� �LN�o�� Jo(� , Wo.� �o(�IN �Xo@ �� #�o� ��o$�� �o���W.� #�� ��� �� �(����,, . Jo(� �o��� ��o� �o����� �� +�<N�������N J(�
��*�o� �N�o�: �:�o��� ��oE(�� #�� ��$�� #��@ �� �� ����) ���oP$ �o�P(���� ��� (��(n� #��@.
Lyapanov Exponent11
3 . ��&' (�� ���� �� �� ��DN����V� : '�;(�. �F(�(� ��� �o����(� ��o� ����!" �N��
Jo(� ��o�;� d&�� �D0��K '�;!�� :� ���X�.� J(������ ��N��� �()�� �D0 ��K��� ���o0 �o� �� ��o0 �(���� �� �(�;!�� J(��;� :� ��( , �� ����0 ����
�Wo.� ���o��� '�o� F�E�. �W.� ���� +�<N ����� , ���(�L!� ':�E!�� ������ \��� �� �� ��%& '�� ����.
���� ��o�" ��o , �o� +�oEN� +�� :� J�������L!� ��., �� �� ��%& '�� ����o0 �N��� �L(��( �� �� �(�;!�. :� +�EN� +�� ��N��� �W.� \��o<$ �oN�
W.� ���. ���� �� �6�� ,� ��%& '�� ,�E� , ,�<�� ����� �� , ��("�5 .���� �� '�,�, ��%& '�� o� � ,�0 �� '�,�, �() :� �� ,�o<�� #��o@ �+:, �� �() :� ���& :� G� , ��� v�| '�� �� ���o� � ,�0 �_�V� '��
�� \��<$ ���� .�() J�� ��� ����� �� , '��VE� � ,�0 �( , _�V� '�� ��<��� �(nx$ ���� �����),�E� (�� �� , �� �(".
���� '�����( \��S ���0�. '�;o�,� +�o�" ��o �� do&�� ���o%& '�o����N������ �N�� J(� 9:��" W; +���N�� '�� F��%$ , + �o� �� �o��� .
���� :� '�. �( ��� �� ���� a�oL����, �o��� �o� 9:�o�" '�,�, �� �� Wo; �� �oPS�, �o ,�0 �o� �� �o�(I� J(�o��(�IN, J(�o�;� �,�<�� W��6
�� �(��� �D0 +�I�� ���� ���. ���� :� ��� �� ��%& '�� �& ��N��: '�;(�. ���� �� �(� z�%V!�
'�o� �o���$ '�����o�� '��� �� '�L(� /(��� �( �(��E(� \��S :� �D(��� �o� J�o� :� ���� F���5 �(�� ��.i� �o����(� �o� ���oL�� J�o�g�� , �,�
W.� ��� ���X�.� ���E� ������ ��(: �N��: '�;(�.]15[. �� ���� ����!" ���� ��� �� �� +" :� '�o� �o��� ��o� �o� +��$ #��o@
'�� ���� /.�$ ��5��RBF2 �MLP 3 ,GRNN4 ��]24[ '���5 j�oN��� a�N ����!" j�N . 9,� B�o.� �� �;�,� ��<��MLP ���o�]25-32[ . :�
:� +��$ �� �L(� '�� ���� j��N�RBF ?�X$ '���" #�&iR� �� �� ��C��D$ �o�5�� ��o�� �oN�:,� ����o!" ��Do. �o��� ��� '��� �� ��� a�N ���� ��o�
W.�]52[ . �oD0 '�;o�,� :� �o�;� q�o���& ��o%& '�;!�o� :� ���X�o.� �o� ���� ���
��� 9��I�]33-37 �29[�� ����� . ���o� �o� ����o.����$� �oE(�C� �o�N��� ��%& '��]25[ ��%& '�� ���� �� '���" '�;����$ �(]30[ . �oL(� �o�(
'�� ���� ��5� ���� '�� ���� :�SOM 5 �� �� ���� �� '�o� �o��� ������� �� �(��� ��.��� b(��N ���E� �N��!�.]38[ .
'�� ����MLP �oN�$ '�����o� ��o$�� '�� ���� ��� �� )��P�]39 �41-51 [ . ��o� ���X�.� J�!� '�� ���� :� ��X!�. ��E�� '� ���� ��� '���
Radial Basis Function 12
Multi Layer Perceptron 13
Generalized Regression Neural Networks 14
15Self Organizing Map

������� ��� �� ��� ����!" #�� ��$�� ������%& '�� �()��* +,��-.�� �/0 ��0�$ ��� �45�6 �...
4 ���� '���& '�;��!� ���<$ ��=����0 �& �>!?(�@
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
W.� �o45�6 Wo���� �LN��� �!�C� J(� b(��N , ���� �� ��<��� ���� �( ������� �� J�� ��� ��%& '�� ���� �]40[.
�P.�$ �� �L(� '����� �� :� �o� ��o(� �o!�C� J(� �� #)�C� +" ��5�(�� ��� �� +��$]85-87[ ��o�N ����� . ���o� #)�oC� �o&��� Jo(� �� '�o�
�����(� ��%&��� '��.�� �� �����5� ���� ��� ����!" �����N�. 3 .1 .�.��� ��&' (�� �����)* %+ ,-�
��o%& '�o� ����MLP �o() �o�* ���o� �o� �o() �o�* +,��-o.�� �o(�� �����N I�N ��V<�� �Wo.� �oD0 q)�o�P� �o� ���� �� , '�,�, �() ���
�()) '�� ( �o�5�� ���oS �o ,�0 , '�,�, �o() J�� �N��� Jo(� �oN" :� , �oN��())�� (� s��$�� � ,�0 , '�,�, �� F�C�E� ��K ��R �� �o() J(� �� ���) �o� (�())'�� ( �o� Io�N +�;�� �( �XV� j�oN �o� ��oE� Io�N �o ,�0 �o() �� �o�(��
�� �� � ,�0 �� �D0��K �( �D0 �(�=$ h��$ F����0 ����. ���� J��* �� /�$�� qi��� ���� �(��1 �� I�N ��(�� . ����� �� W!�6 ��
'�,�, �,� �() �;� ,�0 �� �� a,� �() '�� �N:�. ����o� >o�$�$ J�o�� �� , '�,�, �a,� �oo() �oo ,�0 #��oo@ J(�oo�, �oo0" �oo!�, a�oo. �oo() '�oo�
� ,�0)'�� ( �o� \��o<$ �� ���o� �PS�, �.�� �0" �() �o��� . �$��o�& �o� ����o� �� �!��L�o. +�o(� �N,� � ����,� #��o@ ��Vo<�� ��oE� �o( ��
�� ����)�L(� �() �� �() :� W.�� �� �* :�.( ��� ����%& �MLP �� ���X�.� ���L�. j�N ,� q����& W.� ��;� , �N��
Wo��6 W5� ��E� �� �� ���E� �(�;!��L�. j�N �( ��N�� ���� I��$ F� :��oo� �oo���) ,�oo<�� ��ooE�� ���oo� Woo.�� �oo� �oo* W�oo. :� ( �ooL(� ��oo.� ,
���L�. �� W��6 W<��� ��E� �� �� ���E� �(�� ����) �o� W.�� W�. :�� � ���� �* ��VoE���E .( �P��o$ '�;!��L�o. �,� ��o.� �o�2 a,� ��o.� �o� ,
�D0 '�;!��L�. 3 ��(�� . ���o� �� W5� ��E� �� ��P��$ ���L�. �o() :� '� '��� h(:�$ �L(� �() �� �o<��� ���o� W<��� ��E� �� �D0 '�;!��L�. , �N��
�� �N��]3�4 [. 3 .2 .2�! �3��4 (�� ����
��o%& ���o� j�N J(� �� +��o�& �o� �o�S '�o;N��: '�o� ���� :� ��oE(�� \�� �� �� ��DN��� F��� ���X�.� '�,�,)7 (�� #��@ �� ������$ J(� F����
�� \�& ��0�$ /0 �( ��� . ���oS ���X�o.� ���� ��(: �� ������$ �N�� J(� ���� ���. :� ��( , ���� ��o$�� �o45�6 ������$ '�;��5 J(�$ ���X�.� �� , J(�$��#4�� ��� >P<����0�$ /0 �45�6 �����5 �� ��(��]3 [.
��� '��� ��(� �� �� ���&� �� '�,�, ���� ��o����$ +�o�� �o�N��� F����� ��0�$ /0 \�� �� �� ����)7 ( �o� �� '�,�, J(� ��� W.� ��� ���� +�<N
Fully– Connected 16
Function Signals 17
Error Signals 18
Shot-Term Memory 19
Tapped Delay Line Memory 20
�� ��%& ���� \�� �$ F���)8 (�(��� W.�� . '�,�, ��P(� �tx ����� ��p ��P( +" ��S '�,�,� �1�tx �$� �ptx � �o45�6 �o( �� ��
�oo �� :� ��0�oo$ /oo0p �oo� ���� ��oo%& J�oo� ��oo� �oo� ��oo� ��oo�0m�$��oo�� �1ˆ �txoo( '��oo� �oo� �oo��� ��oo� ���ooC� �oo� ��oo� \oo@�6 a�oo� �
���� ���$� . �o� �oD0 #�P��� ':�. F����� B�.� �� 9:��" ���0�.��(��D0 ��<�N� G� , �!,IN +�(���� ���6 �� ���� .\�� ��)8 ( ,�o<�� ����
�N��: ��0�$7 �o�5�� �o4N �� ���o� '��o� I�N B�(�� ���C� �� ��� ���� +�<N W.� ���]7� 8 [.
� ���� ��� ���;� '��� ����� ��+��� �I�!���N '�E�( �� a��S� ��� �� �o� ���o�N � ,�0 , '�,�, '�o �o� ���o� '�o;(�,�, '��o� F(�o�" ��o��� Fo(�
�� '�,�, +���& �� I�N �� �!���� ���C� ,� \|�X$ �45�6 ��0�$ /0 :� ���X�.�'�,�, ��P( F(��� ���&� ����� � � �1�� txtx ��o�&� ���o� �o� Io�N ��
, �� F(���NW.� �(: #��@ �� �� '�,�: )1( � ( ) , ( ) ( 1) , ( 1) , ( 1) ( 2) TX x t x t x t x t x t x t � � � � � � �
�� +�� ���� ��(� :� ���X�.� �&�N �� ��(� J(� �� �o� ���� +" �� ���!� ����'� � � � �1�� txtx ���C�� � � �txtx ˆ� �� ���S �� ����) �o;�$��(�����
�N��� �(), F(� ��5���4N�� '�,�, ��;*���� +,�N b��.( ����� ��2 ��� '��� �� ��� F(��� #��@ ����]9[ '��oR �� ���� �����
���C� �� +" � ,�0 �� F(��� 9:��"� � � �txtx ��1 ?�o<� �o�P( �.���,�)MLP1 (�N��: '�. '��� ��X '�;�� �� b(��N �� F(���N ���� ���
)9 ( ,)10 (��"W.� � . F(�o�" G-o.� � � � � �1 2 1x t x t x t� � � � a,� ?�<� ��P()MLP2 ( �o� F��5�o� �o4N �� v�oD� �o ,�0 +��o�& �o� ��
9:��" 9,� �� ���� �� '��RBP �� ��� l�. ���. �� �� ��0 '�;N:,�� ,�0 ���C� ��� � � � � �1 2 1x t x t x t� � � � b(��N �� �.��
'�;�� ��)11 ( ,)12 ( W.� ���")�S ���o� '�o� �() a��$ �� W.� ��m \�W.� ��� ���X�.� ��DS �$ �(��L�. h��$ :� '�,�, I�.(
3 .3 . 2�! �3��4 (��<6-
�� ��0�o$ ��o����$ �o( +��� ���S �� �� ��X� \�S W�ES �� �� ��DN����45�6 �� a��S� �&�N �� '�,�, ���oE� 9,� +" �o��!� F(��o�N ���� +��� ���
(� �� ��� ���. '�o;N:, �o� '�,�, :� �� �o45�6 Jo(� �o� F(��� �%S W�ES J �o(� '�o� ���o� Jo(� �� �()�� ���E� W���S :� F�N���� �$ ���� F��P$ F�E�.
F��� ���X�.� �N���. ���o� '��o� �o� W!�6 �( �(�� �o;N" '�,�, �� �o� �o() �o�* '�o�
\�o� #��o@ �� F(��� ��� �� '��0�$ /0 ������$)13 ( �o� �o��� '�o �o� ��0�$ �%�&1�z ���5 �( :�)�!���(� h��$ �( (a���)(zh ��� ���X�.�
(BP) Back Propagation 21
Time Lagge Feedforward Network (TLFN) 22

������� ��� �� ��� ����!" #�� ��$�� ������%& '�� �()��* +,��-.�� �/0 ��0�$ ��� �45�6 �...
���� '���& '�;��!� ���<$ ��=����0 �& �>!?(�@ 5
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
W.� . \�o� �� �� ��DN��� �P��$ r�� ,� �� ��E��, ������(� � ���0�. J(����� ��� ���� +�<N .��.�� �� ����� �L
jjh1
� ��� ���� �(��N �( W.�� �N��: �:�6 �� �N����* J��!�N�� '�����5 �N�� �( +���& �� �� �����
�C�C6 ���C� '�;N�� �:�6 :� �� ���E� �D01 ��� v�V�N� �N�]3 [ . \�� �� �� ����)13 ( ��N , ,�o<�� ���o� �( W.� ��� ���� �(��N�� ��$��.� �D0 ��K ����) ���o� �o( \��MLP �!�o�P�.( '���0�o. �o�
�� ������(� W��LN �( ���" \�� J(���2 ��o. �� ��o� ��. �� W.�1997 ���� �N�L�(� ���� �� F;� '���$ �( �� +��� �� ���]3 [:
������ ������(� W��LN �( �� �N��: ���x$ ��3 �o� q�o�(�C$ ��oR �o� �oN��$ '���� �� '���0�. �( /.�$ ����2 �oN�� �,� r�o� �o� Wo.� r��
��5�� �(nx$ �� ��0 '�P� ���$��.� r�� , ���� �� ���� �D0 '��� �o����� ��� .�� �� �5�P� ��wS J(� �� �� ���0�. J(� �o( ��oN����� �� �N��$
:� a�5TLFN ���� �� �.��� \�S W�ES �� ��. 3 .4 . ,-�< �)2! �<��6 (�?� (��"%�]3[
�� �� ��0�$ �6�, +��� >���$TDLN :, �� F(�(� G����. �( '�;N�� \�� �� �� W!�6 �� ���!� ���� �� �� '�(� >���$ �( �N��$)14 ( ��
���5 >���$ �� a��S�)(zGk ����N �;N:, J(� �� �o� �o� ��DN�o�� F(� F�o����� ',��� ���" \�S W�ES �� �� '���$ +��� :� ���0�. J(� ��� . Fo;� ���N
� W.� +" ��(� �����5 ��0�$ h��$ J(� �)(zG �� �( �N��$FIR 4 �(IIR
IIR 5 \�o� ���0�o. �o� W.� +" F;� ���N ��� ����)15 ( q�o$�m ���0�o. �o( �@��& '�� ���(�� �D0 ���5 �( v�V�N� ��P� �� �� ���� ����� �(�� ���(��
jh �� ����. ���5 q)��P� J(������ '��FIR '� ��)(zG �� v�V�N� �N�� .TDL
���oo. +" ,�oo<�� #��oo.�=� , �oo� �oo45�6 �oo( '��oo� j�ooN J(�oo$ ��oo��� �ooN��$���1)( � zzG �o( �o� ��o�TDL Wo.� . �o( ��o(� �(�o� �o��!�
�45�6 F�E�. ���� ���� �� ������ ��� ��5�� +�EN� :� ��� �o� '��o� �o� �(�� �� ��5�� ��� �� W.� F;� �;N" ���n� '�;N��: ��o� . ���o�n� ���� �o� �o��!�
Wo���� �� ���� ����� �� , �(�� ���� ���n��� �(�� ��P( ����N F;� �(����� , +��," W.�� W; �� �� '��� �N���* ���� �o��� ��o���N ��o�(" '�o�
���� �����0�� '���� W���� :� �( ���� . � �o|�6 ��o6 �� �� ,�o<�� ��o.�= \�o� �� �o� ���� J(� '���)15 ( �o��5 '�o �o�)(zG �o��51�z ���oS
�oo� �oo� ��oo�� '�;�oo� ���oo�$�� Woo.���m \oo��S F(:���oo�)14 ( �oo$)17 (�
Real Valued Kernels 23
Univers Dynamic Mapper 24
Myopic 25
Finite- Duration Impulse Response 26
Infinite - Duration Impulse Response 27
k���� �� ���5 � ��. �� F(�o�L� �4N �� �� ��0�$ /0 �45�6 �( ��� �o�N� \��)16 ( '�� ��)(zG \�� >���$ ��)15 (F(��� �N� ��5�� ���S:
1 0
2 1
3 2
, 1
0 0 1 10
( ) ( 1)
( ) ( 1)
( ) ( 1)
( ) ( 1)
( ) ( ) ( ) ( ) ( )
ij ij
ij ij
ij ij
ijk ij k
k
ij ij ij ij ij ijk ijk ijl ijll
x t x t
x t x t
x t x t
x t x t
y t w x t w x t w x t w x t
�
�
�
�
�
� � �
� �
�
)2(
�� F�E(��� F����V� �� �� #��.�=� ������� �� �� ��!�6 ��N� '���� ��.�=� �() ��* +,��-.,�� �� \�& �N�LN��� F(��� F���. �� � �$��
\��)14 (F(���: )3( � ( ) , ( 1) , , ( 1) TX x t x t x t m � � ��
)4( �
�
1 1 111
111
,T Tmn n m
Tmn n m
Net G X Net G X
F Net F G X
�� �
�� �
� � � � � � � �
� � � �� � � �� � � �� � � �� � � �
)5(
1 1 111 12 1
1 1 121 22 2
1 1 1 131 32 3
1 1 11 2
k k nk
k k nk
k k nk
m k m k mnk
G G G
G G GG G G G
G G G
� �� �� �� � � �� �� �� �� �
�
�
�� � � �
�
�� F(��� F� �N��� �():
)6(
211
221
2 2 1231 1 1
21
, ( ) ( )
k
kT
k n n
n k
G
G
G o t G F NetG
G
� �
� �� �� �� �
� � � � � � � � � �� �� �� �� �� �
�
\o��S �o�6�� �o� �o� Wo.� ��� ���," � ,�0 �( '��� #��.�=� J(� ���!��� I�N � ,�0 J(��* �� F��P$ ����.
3 .5 . ���� 56��# TDL ]86[
F��o��� :� 9:��" W; \�S ��N��� I�N ��(� �� #�oP��� j�o�� ':�o.�� ���X�.� �D0 F���.
)7( 21 1( ( ) ( )) ( )2 2i i i
i i
E d n o n e t �
+" �� ��id ��� '��� �:��N� �PS�, ���C�io �o� ��� ���� ��� ���C�,���� .

������� ��� �� ��� ����!" #�� ��$�� ������%& '�� �()��* +,��-.�� �/0 ��0�$ ��� �45�6 �...
6 ���� '���& '�;��!� ���<$ ��=����0 �& �>!?(�@
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
#����x$ J��P$ , #��.�=� �� ��6ijw )�;N:, ( �o� �o ,�0 �() :� ��o� F(:�\�� �� ��� ��� J(� :� \�S)15 (F(��� F��� WS� :
)8 ( ( )( )
ijijl
ijl
yx t
w t�
�
)9 ( 00
( ) ( )ij ijij
ij i
y t y tw
x u� �
� �
� �() '�;N:, F�4�$ '���F(��� �� W!�6 �� �N�� : )10 ( EV
V� �
� ��
)11 ( 2
2E E O NetV O VNet� � � �
� �� � ��
� �2
2, ,E O NetD O O HO VNet� � �� � � � ��
)12( )13 ( ( )V D O O H� �� � � � �
)14( 2 2, ( )V H D O O� � �� � � � � (��� �� W!�6 �� '�,�, �() '�;N:, F�4�$ '���F :
)15 ( EWW
� �� �
�
)16 ( 2 1
2 1E E O Net H NetW O H WNet Net� � � � � �
� � � �� � � �� �
)17( ( )E D O O V H XW� � � � � � � � ��
)18( 2 1W V H X X� � � ��� � � � � � � 1 2 V H� � � � � )19 (
)20 ( new old
new old
V V VW W W
� � ! � �"
+" �� �oo�VW , '�,�, , �N�oo�� �oo() '�oo;N:, �oo&��� ��oo��� �oo�,HX , +���ijx �N��� ���S G����. �45�6 �� �� ����� �� ��. 3 .6 . ,# -�C�� $����D� - ���� ����]16-23 /87[
���o� ���o� �o( '��o� ���n� �(��C� a��$ ���� �� ��X� �� ��DN�����N � �$ �N �����0�� �(�IE� W���� :� , ���� F�N��o�� ��oE(�� J(����o�� ����E
�o45�6 ?o�& F�N��o�� ���;� #���& �� �( �F���� ����� ����� W=$ �� �45�6 '� :� �o(�� Go� �F(�,�o���� ����� W=$ ��(�| /.�$ �� W.� ���� �� ���� ��
���. �45�6 �(TDL ���� '��o� F�N��o�� �o� F�o�� Wo��6 ���o. �� '�o� N� z�o0 '��no� 9:�� �( ����n� _o(�P$ �� '������o� �o�P( �F�o�� a�o
�� +" +��o�� q�o�N�O ��o�� J�o�P$ �� �o45�6 ?�& q),� �� �F���) ������o� ( Wo=$ Io�N �� +" ��o%& ���o� �o� 9:�o�" :� �o6�� �� �R , ��� ���S 9:��"
W.� +�EN� �45�6 F�E�. :� ��C$ �� I�N ��� J(� ���!� ���� 9:��".
�� �45�6 ���0�. �� F�N������ �� �o45�6 ���%& '�� '�o�P� �o� ?o�S� '�o� �o� �&��$ �� +�EN� �45�6 ��<�� ��� ����E�N �$��-��� �� }D%� �o��� . qi�o�
�o� q)�o��6� �o�� ���,��N ��( �� q�C�S� �� \�S ��X� '��� UV� �( W.� J���W.� ���� :,��� :� ����� �( �$��. ��� �� ��," �R�0.
�45�6 j�N� :� ��( ”r�=�� J�LN���“ W.� . /o.��� �9,� J(� ��m �oo� ��oo.�=� �oo4=! �oo� �� �� ���� Joo(� �oo�(��D� ��oo���m +�Ioo�� qi�oo� ����
���()" :� ��( ����!" �R ��2m W.� ���� \�S W&�.)���� F�oN �o� '�o�
� ��o� '����o� �����N W&�. Wo. .( Jo(� :� k��o0 �o� �R�oCN 9,� Jo(� �� ��,�=�m �o�N �� �.��.� , ����� W=$ ����E� �(�$ #��o�& �o� ���o���
�� 9����5 #�&iR� ��;� ��o� . ������o� J(����o��m ?o�& �LN�o�� �&�oN �o�WE� I�N �45�6 .���� ����� j�N ,� �45�6 j�N J(�:
- �46i� :� G� �;�$ ���(� �,�m �o� �� W.� �,� �N��N �� ��o.�=� +��o$��� j,�� .
- W.� UV<� , W��O '���C� �45�6 ?�& ���(� a,�. +��� ���0m '��� �45�6 �( �� ���:��N F�E�. ��,i& ��m �o� �;��� �DCN
���� �� ��6 +��: . ��� ���� �$,�oX�� '�o;��`(, +�EN� #�� ��$�� �45�6 . :�W.� ���x$ \��S �45�6 J(� ?�& ���(� �� . '�(�� �O� �� �P(�S, , ����6
�N)�R #�� ����nL� +�EN� ',� �o� �S�o� �45�6 �� '�$ Fo� h(�oS, , �o�N��W���� �� 9����5 �$�,: ��$ �N�� . �o� �o;�$ , ����o. �o� �o�`(, Jo(� ��o(����0m +���� #�&iR� :� �DCN �( +��� W.� �(n� .\��)17 ( ��o��� +�o<N
�� ��0��� ���� a�N �� �� W.� �45�6 j�N J(� F�o4�$ �o� �45�6 J(� ?�& ����������� ���C�� W.� ���x$ \��S.
���� +��" �� �� d&�� �� ��;� \���& :� �L(� ��( J(� �� ���� '�� �� �� ��� �N��: ��0�$ 9,� ,�FIR ,IIR �� �N�,��5 >(�P� '���� ������
�ooR�� �(�;(���oo(���N +�oo�" ��oo �� �oo( , ':�ooE!�� �,�oo=� Woo�5�� �oo�N����L(� \���& , 9:��".
��� \(�,� �$ ���o� '���o(�� >o���$ W���S I�N ��N ' j�oN '�o�FIR �o����� W(I� '��IIR �:�6 �� ��������� +��� F� �� '�� �� , �+��: ��I�
��� �o( �o��(� �o$ W���N /o.�$ ��oN �o�� \o(�,� �� \�o<� Jo(� '��o� \o6Principe ,de Vries ]21[ ���� a�N �� ���� ���� �o� �5�P� ���� '�� .
Wo.� Io����� ���� �( I�N ���� ���� . �o��� ���o� '�o(�I� :� �oL(� �o�( W!�6 �� h �� ��� ':�E!�� �� ���� J(� '�;�(�N��$�:��N� '��,�, '�o��
#��@ �� � ,�0on-line h ���� �� �W.�]17[ �( ':�E!�� �� a��S� �� ����� ����� �o( �o�� �� �W.� ��x�� ��X. I(�N �( #����x$ �� +" �� ����� ����� Io�N �; �o$ >!� b(��N , ����� �W.� 9:��" \��S +"
" W.��W.� ���,. ���� �o� ,�o<�� �o() �. j�N :� �9��I� J(��� ��� ��5�� ��� �� ��%& '��
W.� �XV� �() �� �(��L�. �D0 ��K �%�& .�45�6 �� �� ���� '�� �� +��$

������� ��� �� ��� ����!" #�� ��$�� ������%& '�� �()��* +,��-.�� �/0 ��0�$ ��� �45�6 �...
���� '���& '�;��!� ���<$ ��=����0 �& �>!?(�@ 7
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
W5�� ���� � ,�0 , �XV� �() . \�� ��N��� +" \�� ��)14 ( �� �W.�
�o%�& �� '� ��)(zG #��o�&�
���1z
�o(1
1
)1(1 �
�
�� zz�
� ���oS
�� \�� B�.� �� �(: #��.�=� �� ����)17 (��(n� �� #��@
)21 (
1
1 0 01
1 1 0
1 1 0
( ) ( ) ( ) ( )1 (1 )
( ) (1 ) ( 1) ( 1)( ) (1 ) ( 1) ( 1)
zx t G z x t x tz
x t x t x tx t x t x t
��
� �� �
�
�
� �� � � �
� � � �
Wo���� �o*�� ��o� �o� ����<�)1(0 �tx �����o5 ��o��� ��o<��� �o�,�ooP� �oo� ��oo0 �oo� '��oo<�� ���ooC� �Woo.� �oo45�6 ?oo�& ������oo� �oo� � ��oo��
,)1(1 �tx �� �����0�� '���� W���� :� >(�| \�!�� ������1 ���� +" '���C� W��6 W; � W.� _!�V�.
���ooC� �Woo.� �oo.��� \oo��S �oo� '�ooL(� Foo;� �oo��N �oo��!�� �oo� Woo.����10 ## � �o� ���o(�� �o��5 �( ����5 ���� �� +" '�o;�DS �o� ��o���
�=X@ W.�� W�. �� , �6�, ��(�� \0��Z ���, �W.�21 ## � �o����� ���(�� ���5 +��� �=Xo@ �o* W�o. �� +" '�o;�DS ��o� ����Z �Wo.�
G�20 ## � W.�. '�o����5 �o �$ >!� ���(�� z��0 �wP� :� �����$ ���� ���5FIR ,
���5 ���$��S z��0 :� �wP�IIR �� ����]16[ . ��.��� #��.�=� ���!� k��o0 d=� �@�6 :� �� ���� �� , ���� '��� I�N '�
���� +�*, �W.� �� ��EE� #��@ ���� '�� �o.��� �o� \o�!� J��� �� �����E�.�� ��EE� F F(:����.
3 .6 .1 . -�C�� $����D�
�� ?�R'�; )15( ,)17( �� F(��� 0 0 1 1
0
( ) ( ) ( ) ( )
( )
ij ij ij ij ij ijk ijk
k
ijl ijll
y t w x t w x t w x t
w x t
� � �
�
)22(
, 1( ) (1 ) ( 1) ( 1)
, 0ijl ij ijl ij ij lx t x t x t
l
� � � � � � �
$)23(
�� ���L��,0l W.�iijl ux �� ���. ���o� ��N��� I�N #��.�=� �C��� '�o�MLP �Wo.� +��� #��o@ \o��S
�V� �� ���!�TDL :� �o�(� �o� F(��� ����� #��.�=� ����� �� �&�N �� I�N�� '�����0 +" ����$ �� ���E� ���N J(� �� �;�$ ��(� �� , �F��� �� ��� F���
� �� :� ���� h��$ �( J�5�� ���Sk �( :� �;�$ G����. �( ��� '��o� h��o$ Jo(� :� a��o� �� J��g�� �W.� ��� ���X�.� +" �45�6 ?�& J��P$ '�o�
�� +:, �( '���� ���� +:, +��� �CN �� ����� ���� �� �� �� '�o�MLP � ':�� �45�6 +,��� ����.
�o�� F(���N +:, �( �;�$ �N �� ��(� �hS�,�� ) \�o� �o� �o �$ �o�)15 ( ���o� ���oP$ �� ��E� �o��� '�o� (1�k �o( :� �,ioP� ���o��� \o��S +:,
�����5� F(�����o0�� I�N �45�6 ?�& ����� W; . �o@� �oV� �o� ��o6�N�L�(� 9:��" ��P( ���� �� �� F(:���� .
3 .6 .2 . ���� 56��# ����
F����� :� 9:��" W; �\�S ��N��� I�N ��(� �� #�oP��� j�o�� ':�o.�� ���X�.� �D0 F���
)24 ( 21 1( ( ) ( )) ( )2 2i i i
i i
E d n o n e t �
#����x$ J��P$ , #��.�=� �� ��6ijw �� � ,�0 �() :� ���� J(� :� \�S F(:\�� �� ��� ���)15( ,)17( F(��� F��� WS� :
)25( ( )( )
ijijl
ijl
yx t
w t�
�
�D��� �� � �$�� J��g��,)22 ( F(���]16[ :
)26 (0 0
( )( )( )
k kijlij
ijl ijl ijlij ijl l
x ty tw w t%
� �
��
� �
+" �� ��
)27 ( , 1
, 1
( )( )
(1 ) ( 1) ( 1)
( ) ( 1)
ijlijl
ij
ij ijl ij ij l
ij l ijl
x tt
t t
x t x t
%�
� % � % �
�
�
�
� � � �
� � �
)�oo� #��oo.�=� �� �oo�0$t ,0$l�oo� Joo(� �oo�K �� �oo� ��oo���#��@0ijl% �� ��� . �D���)27 ( �oD��� '�o�� ?�<� :�)23 ( Wo.��
�� F(��� ���(":
, 1, 1
, 1, 1
(1 ) ( 1)( ) ( 1) (1 )
( 1)( 1) ( 1)
( 1)( 1)(1 ) ( 1)
ij ijlijl ijl ij
ij ij
ij ij lij l ij ijl
ij ij
ij lijlij ij l ij
ij ij
x tt x t
x tx t x t
x tx tx t
�% �
� �
��
� �
� �� �
��
��
� � � � � � �
� �
� � �� � � � �� �
� �� �� � � � �
� � )28(
�D� �� +��� ��)27 (�� ��(�$ �� ���. F(��� ��.�=� J(�0" +���& �� W(�;N �� :
)29 ( 00
( ) ( )ij ijij
ij i
y t y tw
x u� �
� �
D��� J(� �� �D��� :� W!�;. �� �)22 (�� W.� �� �(". /��,� �� ���)25( �)27 (, )29 (�� F��� � �$ �� �� F���� ��6�� �� +��$
:��N ���� /��,� ����$BP �� �� ��MLP ��.�=� #��@ +��� �� �F�����F��� . \o�S \o%5 �� ��o� ��o��N /o��,� , ��o�" W.�� /��,� �� � �$ �� ��

������� ��� �� ��� ����!" #�� ��$�� ������%& '�� �()��* +,��-.�� �/0 ��0�$ ��� �45�6 �...
8 ���� '���& '�;��!� ���<$ ��=����0 �& �>!?(�@
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
E� �L(� #��.�=��� �;(�� ��� ���� . �Wo.� �o�m \o��S �o�(� �� ��;� ���N s��$�� �LN�L*TDL �� ���� �� ���� . , F�o�� WoS� v�o0 �o��1�
�o( �� \(��$ \��S ��6�� �� ���� ���5 �F��� ���S TDL �o��� �o�P( �Wo.�h�� W!�6 �( �� , �$ �o� W�oEN '�o$TDL ���� . #��o.�=�BP ��o� '
TDL �o;�$ �Wo.� ��%6 \��S W!�;. �� ���� '��� ��� ����N /��,� :� I�N ���� ��� W.� J(� ���NTDL 9:��" �� ����N ��.
4 .ANFIS
���� '��ANFIS ��o. ��1993 '��o��� +�(�o<N�� :� �o�( /o.�$ a��� ���:Jang ]53[ �� �5�P� .ANFIS ���0�. �( +���& �� ��&�S , ���
':�o5 a�o5 �o� �o;N" �oD0 ��K ':�E!�� , �;��E�. �(�.��� '��� �� >.������N > ��0 �� �� '��(: #�; �$.
��DPN� �#�; �$ J(� W&�� ���� J(� �$��.�=� �(���� , '�(n����� .) �$��o.�=� #��o@�%0 �o�� �oN��� �()�o� ��DPN� �� ���E� �(�;!�� ����
�N���N ��.���)Mamdani (���� , �$��o.�=� #��@�%0 �� ���E� �(�� �N���N ��.��� ��DPN� �!, v�01MLP.(
��� �� UV<� ���� J(� a�N :� #��@�%0 J(�! ,� \��o� ���o� Jo(� a�oN �W.� �V�:
1.Adaptive Network : �� �V� J(� :� ���N �O�� #��.�=�W.� ��%& ���� ��� �&�N �� �� �����.
2.Fuzzy Inference Systems : k����o.� �V� :� I�N ��DPN�W.� ��� ?�<� ':�5.
F(��o�N do=� \�o%X$ �o� \o�S '�;<V� �� a,� �V� ���� �� . '�o� ���o��P.�$ �� �C��D$,�<�� '�� ���� :� '�2 _o(�P$ #��o@ +��o� ���o��� �o�
�� '�o;N,�N q),� �o� F�o��� ����� ,�<�� ���� �( ��� �� �N��3 �o� �o� +"�� �� ���5 ��o��� ��o����0 . #��o@ �o� �o� ����oN �o�,I! �o� �o�P� +��o�
�(��L�.4 �o( �.�� �( �.���. � ... �o� ���o��� ��o0 �o� �� �o��5 �o� �o�N��$�N��L� .�� �;N,�N q��N�O �o� �o( ��o��� ��o��� 9:�o�" '��� �� �(��������� ��N��$
W��O �( ����� �(n� ?��D$ �L(� #���&5 �����. � J(� #��@�%0 ,I W.� +" '� �� ,� #)�%$� ��� . �o() �� ��P(
�� \%�� ��0 :� �$� '�� �() �� Jo(� +��o� \o��� �o� �o�,I! ~�o� , ��� WE�N � �� ,� #)�%$�)�() ��� ��P(����� \%�� �L(��� �� ��(.
���� J(� ����� ��5�( \���$ �VEN ���� ,�<�� '������� . +��o$ �o� J(� ��������� :� \�� �(��RBF �MLP , ... ��o� �oC$ ����N�o0 Jo(� ,I �� . ���o��
1 Multi Layer Perceptron 2 Feed Forward Network 3 Neurons 4 Sigmoid 5 Fix
���� '��� �!�@� ���0�. �( +���& �� �N��$ �����0�. J(� �J(� ��o%& '������ ��D� . ���o� �N�L�(� ��`(, J(���;� �o( +��o$ �o� �o� Wo.� +" �o�
���N _(�P$ +�<(��� +�(���� �� ���� '�����( aI�N���]54[ . +" s�o� �o;�$ ����� �(n� ?�<� ���� '�;N,�N h���$ , ��(I� h��$ �� WE�(� . �o� #��o@ �!,IN +�(���� #��@ �� �� �(�;(��� ?�<� B�o.� �o� �oN�(n�
���N: �,�P� J�N��S�� '������ . �� ��]55[ ��� ��0���� �;N" �� \�%X$ ��W.�.
�(�� �� �(�N" :�'�i�<� ��!,IN +�(���� 9:��" 9,� J(�$ :� F&� �$����� �� \(��$ �'��� �o=� '�o�6 ��oN���Jang �o����$ J�N��oS , �;o�,�
9:��"7 ��o� ��;�o<�� 9:�o�" W&�o. +��o� )�o� '��.�� �� ��. Jang �� a�oL�;� �o!�C� ,� �� ��0 '��;�<�� ��:��" '�;�,�8 a�oL�;��N �o( ,9 �o �$
W.� ����N. ��� �� ':�5 '�;��E�. '���������!" ���� '���E� � �$ ���� ��� ��
Woo.� �oo�5�� ���ooS +�ooCC=� :�]76-84[ . '�(noo����P$ j�oo|�� Joo(� \oo�!����I� �� +�� \(��$ '��� �;N" W���S , ':�5 '�;��E�. �o� �N��: '�� �o��� .
��� :� ��� �� ��P� J(���� ���� ����o!" �o���: �� �o� ��o�0 ���5� �� +��$�� �$����$ '���� ��� �=o@ ����� ���Io� ��o�N �Po. , ��o�N W �o� �� �(�o�
��� #i� #��@ �� �;N" :� �N��: #��@- �o���� �� �o;N", ���o� ��oLN"���N �� �$ �|�(� +��� �� ':�5 F�E�. . ���o� ����VN ?�S� '��� J��* q�PDS
?�S� �$i� �( ��,��� +��: �� �� ������� #i� W.� J��� ���0 ��5 ��(:x$ ���:��N, �����N do=� +��� J(� �� ����� ����� WS� ���;� W; �� �$����
�� 9:��" '�oP� '�;o<V� �� �N������ �� W.� '��� �&�|�� �� ������ W�=@F�(��N.
��o� �o���: �� ��5�� #��@ '����� �� :� �o�� �o� ����o!" �o������� ��%& '��– :� +��$ �� ':�5]76 �79 �80 �84 [ :� �L�� �� ��� a�N
����N ���X�.� �,� j�N ����. �����$ �( , �N���� ':�5 '�;��E�.�N� . �o�( ���o�N Io�N ���o0 �oE(�C� �o� �o���: J(� �� ��5�� #��@ '����� J(��;� :�
h ��]77[ ������ . ��o� �o� a��oS� +����oE(�N �!�C� J(� �� �o�� �o� �o���ITFFNN10 ����N�N� .���� �( ���0�. J(�� ��� ':�5 ��%&� �o��� . ��
#������ ���N�! ��N��� +���N�� '�;�:��" �� �� ��0 9,� I�N W(�;N11 , �� �o����$ ��,� +���& �� ��<��� #�P��� J(���� ����� �� �!,IN +�(����
��� '��.�� �� ��o0 9,� Wo(�;N �� , ��o�N +,:� �N��: '�. ����!" ���� ���� ��ANFIS ��:��" '�;�,� ��Jang �V� �� �� W�=o@ �$" '��
W.� ����N �E(�C� ���N F����0 . ���o� �o� 9,� Jo(� �E(�C� �L(� ���N '�o�
6 Local Minima 7 Hybrid Learning 8 On – Line 9 Off – Line 10 Interval Type-2 Fuzzy Neural Networks 11 Levenberg- Marquardt (LM)

������� ��� �� ��� ����!" #�� ��$�� ������%& '�� �()��* +,��-.�� �/0 ��0�$ ��� �45�6 �...
���� '���& '�;��!� ���<$ ��=����0 �& �>!?(�@ 9
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
��%& MLP ���� �� . ��o� �� �,i& J��g�� �o� a��oS� ��o� ����o!" �o��������� �N��: '�. ����-Bi�1 W.� ����N I�N.
4 .1 . ��G&' (�G� ���G� 2! -�C�� $����D� - 2��1��– (6�G�
ANFIS ���� J(� \�� ?��D� �() b�� '����)22 ( ���� ��]53:[
�,� �() :?P$ h���$ �() , '�,�, �() : ?oP$ h��o$ �( ��� �� �() J(� ��2 �� �(��N ���� ��5�� ���� �45�6 �6�, �( +���& �� , ������ . +��o�& �o�
, �o� ��o.� Io���� \o��S :� �(�o�������� '���� �o� J�o.�� ?oP$ ho���$ ����,��.� GN�(���� ��9:��" '��������� +���& �� �� ������ a�oC� �oV� �(n�
�� ��0����N�� . a,� �() :J�N��S �() : �o� ��0��� J�N��S '�� ��� +���& �� �() J(� �� �� ���
�N�� . ?oP$ +�Io�� v�o| /o.�$ +�N�S �� �$" #��S +�I�� W�ES J(� ��� �� �R���� ?P$ h���$ �� '�,�,���� W.�� �L(�� �(" ) �D���)31 .((
a�. �() :+��.�I�!���N �() : �o� �o �$ �o� +�N�oS �o� �o$" #��S �() J(� ���� �I�!���N �L(� J�N��S �$" '�� #��S��� . �$" #��S �� #��@ J(��
�� F�EC$ J�N��S a��$ �$" '�;$��S \� j��� �� +�N�S ����� . a��;* �() :':�5 ��K �()�.: : W.�� J�N��S :� a��� �� � ,�0 �() J(� ��
�� �;(�,�, :� �D0 h��$ �� \�� J(�� ��(")if ( �I�!���N �$" #��S ���� v�| ������.
F�� �() :� ,�0 �() :� ,�0 �o ,�0 j�o�� :� �() J(� �� ���� '���� \@�6 F�� �() '�� ���) �D���)33.((
� \�� �)5 ( W!�6 �� ����MISO '���� �� �W.� ��� ��5�� �4N ��n �� '�,�, \��o� >o�$ �$ �� '�,�, �� �� ����1k �2k � ... ,nk h��o$
�� ?P$���� .�� j��� �� J(� ���������6 +��$ �R ���o� J(� '��� +�N�S+" �� �� W��N :
1 2 nR k k k � � �� )30(
���� �i jj
jAx� '�,�, ?P$ +�I�� ���P� ��j- ?P$ h��$ �� a�ji
jA-
'�,�, ?P$ h���$ �&��� :� a�j- ��,� #��.�=� ��LN" �F��� _(�P$ a� \�� ���� � )5 (W.� �(: #��@ ��:
� � � � � �1 21 2
1 2i i inn
i nAA Aw x x x� � � � � �� )31(
+" �� �� � �� �
� �
1 1
2 2
1, 2 , , ,
1, 2, , ,,1, 2, ,n n
i k
i k
i k
&
&
&
�
��
�
)32(
1 Mackey-Glass 2 Member Ship Function
,i jjA
� '�,�, ?P$ ���C�j- ?P$ h��$ �� a�ji - �� a�����.
�D����� ��)31 (iw +�N�S �� v�| k����.� ��$�� � ,�0i- , W.� a�F(��� W(�;N ��:
1
1
R
i ii
R
ii
w fO
w
)33(
+" �� ��
�n
l
il
ili Ribxaf
1,,2,1, �
)34(
4 .2. ���� 56��# (���-2��&' (��– (6��
� ��DN���'� �(�� ��� ����� � �9:�o�" '��o� ��o� ���X�o.� 9,� J(�o$�� +�(������ ����� '�;�,������ .G� '������ ����$ ��<�N�3 F�4�$ W;
���� '�����������%& '��– ����E� ������ ':�5W.� ����� '� . Jo(� +���� �oPS�, , v�D� '�;� ,�0 J�� #,�X$ �� ���� �� �,IN B�.� �� F�(��L!� ��o� _o(�P$ ��� :� '�D0 +���N F� ��;� #���& �� �( ���� �� ���� �� .
�o� �N�� �� F�4�$ '��R F�(��L!� J(� ��., �� �;N:, , ��������� a�� �� �����L� ���S ��0 �!,IN '��.�� �� �D0 . a�oN �o� '�(��oC� :� F�(��oL!� Jo(� ��
��:��" '�� W&�.4 o��;� s�CN W�. �� W��6 '�;��� �� �o� J�o�P$ �� ��� ���X�.� ��������.
Jang ��0 �,�P� �!�C� ��]53 [ 9:�o�" W; 9,� J(��* �5�P� �� '�� ����ANFIS ��o%& '�o� ���� �(�. �� F��P$ W���S �� ���N �����
– �� ���� I�N �� ':�5�����: 1- �!,IN +�(���� :�� 9:��" �!,IN +�(���� ��� �� ��������� ��������. 2- #�oP��� J(�o��� J�o�V$ �6�� �( , �!,IN +�(����5 : LSE a�o� ��
�o� ���S ���X�.� ���� �!�$ �V� ��������� �� ��!,� ��� ���C� '��� �,� ��o�� �� F�(��L!� ����� �� �� ��������� a��$ ':�. :,�� �CN �!,IN +�(���� G-. ,
W��� ����0 ��;& . 3- , �!,IN +�(����LSE : �!,IN +�(���� :� �����$ #��@ �� ����$ J(� ,LSE���� �� ���S ���X�.� ���� � . /o.�$ �o��C� �oV� �� #��@ J(��
/.�$ �!�$ �V� , �!,IN +�(����LSE �(� ����0 9:��" . 4- LSE ���$�$ :��%& ���� '��������� a��$ ����$ J(�- �oD0 �� ':�o5
$ J�!�����5 F�(��L!� :� , ��� ����5�( �P.�6 �o���� ���o� ':�o. :,�o� '��o��� ���X�.����] .56 �57 [���� �� �� 9,� J(����� ���� ��%& '���N�.
3 - Back Propagation 4 Learning rates 5 Least Square Estimation (LSE) 6 Extended Kalman Filter (EKF)

������� ��� �� ��� ����!" #�� ��$�� ������%& '�� �()��* +,��-.�� �/0 ��0�$ ��� �45�6 �...
10 ���� '���& '�;��!� ���<$ ��=����0 �& �>!?(�@
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
'�����o�� J�!,�EKF ���o� �� �� �N��o�� ':�o5 '�o�]58[ #��o@W.� ��5�� . b(��N , ��� ��E� ���� ��������� ':�. �D0 +,�� 9,� J(� ���!�
W.� ������� �� �� ��!� . �� �,��o�� '�;o�,� :� '���E� �� �$)�C� :� ��( ���� 9:��" ��ANFIS ���E� ����]59[ j���� 9,� J(��* �� ���� ��
�o� �o�0���� �o;N" �oE(�C� �o� , ���o�N �5�P� a�C� '��������� 9:��" �� ���� +�(���� B�.� �� �;�,� J(� ����$��N��� ������ : ��o<�N� ��o!,IN +�(����
h(�oo.1� ��oo�; ��oo<�N�2 #�����oo� ���N�oo! , . F�(��ooL!� �oo� �oo;��(��L!� Joo(���oo<�:�� #�ooP��� J(�oo���3 �� ���oo� ��ooE����� �!�oo$ �ooV� 9:�oo�" '��oo�
?��D$ �(�N��$ W(�C$ '��.��ANFIS . '�o���� �oL(� '�;o�,� :�]60[ ,]61[ :� ��PSO ����N ���X�.� ��������� a��$ 9:��" '����� ��N� a�oN +��o$
��� .���� ��;� ���� �!���� ������ :� ��0� �!�C� ,� ���!� +" �(�N��$ :� �N , �N��(�.��� ��. Jang �o� ��o�� ��o0 '�;(:�o. ���� '��� �� a�. 9,� �!�C� ����� ��-
�� ����� F;� �$��N �� ��� ������� ��� :" �)�o� '�o� 9,� v�oV�N� �N:��o$#��.�=� ����g�� J�� �� W.�4 �N ,����& ��5 �� ��o�N ���oS�� +��$ �o� �
�o� �!�o$ , a�C� �V� '��������� ':�. :,�� �����$ '�;�,� �� ��N" \�!��� #��@ �N���� #��@�� ����& J(� h(�E$ '��� J(� ����� ��(n� +��o$
���;� W; �� �L(� '�;�,� :� �o�N��� a�C� �V� ':�. : �k,�Io� +�o(���� a,� ��$�� '�;N�(����]62[G� � h(�. ��<�N�]63[���;� � �oD0 �o�K �(�;(:�o.
]64 [���N ���X�.� �L(� '�;�,� ,." 9:�o�" �� j�o��� '�;o�,� '������� F;� ���N ��� ��D� '�;�,� :�
�� a�C� �V� J(�o��� 9:�o�" :� �!�o$ �V� �� �;�,� ����$ q��(�C$ ������ J�!�� ���5 �+" ����N�0 F� �( ��<�:�� #�P�������N ���X�.�N� . Fo;� �o��N
9:�o�" �� '��o(: Wo���� a�oC� �oV� '��������� �� WEN" 9i$ J(� :� �o� �N�o(���� #��o.�=� �� )�� ����g�� \�!�� ��� ��;�<�� '�;�,� , �N��� �o4N �o� >.��� �� ,�0 �� a�C� �V� '��������� �D0��K ��w6 �� � �$
��N��.�. $��& ��� ��D� �� �(�;�,� ����& \�!� �� , ���� +�(���� �� ��E��, q�
�� ���� ���� F� :��� +��� W.�� �. , >.����N�� . �o� ��E��, �� �(�;�,����;� '��� �O�� �(�;�,� +���& �� �N��� F� #�P��� J(���� '��������� ':�.
�� ���S ���X�.� ���� �!�$ �V� '��������� �� W.� J(� F;� ���N ��� ��N��� �o��;� �o=� #��o@ �o� ��� �!�$ �V� �o� ':�o. \�o<� �o� ��oE(�� �N�o�
Overparametrize '��o& #i�o<� W�o. �o� F�E�. �$ ����N ���0����<N W(��� . ��]65 [ '��o� , Wo.� ��o� �o�0���� \�%X$ �� j�|�� J(� ��
1 Quick Propagation (QP) 2 Resilient Propagation (RPROP) 3 Recursive Least Square (RLS) 4 Computation Complexity 5 Performance Resulting
���;� �� '���S ���&� �� \wP� J(� \6 �o=� �o( �� #�P��� J(���� ':�.�����W.� ����N ��;�<�� �� �(��� . �o� �oL(� �(�;�,� :� �o� '�;o�,� +��o$
F�(��oL!� '�;�,� ���� +���& �� ���� ��D� �� W�P� B�.� ��o��N^ '�o����;�+�L*��� '�;�N�!�� �#��m �,�� ':�.6 ��oE��, '�;�,� �L(� ,]66 �
67 .[ ��]67 [ ��oo%& ���oo� �oo( '�oo��������– �oo�� �oo� �� ��oo<��� ':�oo5
'�;�,�PSO �GA �o� W.� ����N ':�. :,�� �9,� ,� J(�:� �����$ ,�� h(�� ��,����� . �o� Wo�P� �� ��E��, �� ���� \� 9,� J(� ��� , �o��
�� '���o(���N �o� :� �o$)i�0� ��o*� ���� W.� J��� �(��L�� W&�. oP� '�o;����� ��o���N >.��� ��!,� '�;��P� ���� ��� �(�.��� , ����� '�
i��o� ���o� �����o� J�o�g�� , �o.� �o� �o4N �o� \o��=� ���oE� l�X$� J(�a�L�;��N7 ����� . �� ���!�]67 [ ��]68 [ �� �� ���� �����]68 [ '���o(�� d=�
�(��L�� ,PSO �� �!, ����N ��R '�P� ��* /�V� '�w5 �� ��]67 [ ��W.� ��<N �; �$ '���(�� j�|��.
��m #��N �� � �$ �� ���o� a�C� �V� '�������� ':�.:,�� ���� '�o���%&- ���� �N�L�(� � ,�0 �� �� �D0��K �CN \�!� �� ':�5 ��oN��� �o�
\�<� ���E� �V� '��������� ':�. :,�� :� �$�!�$ �o5�P� '�;o�,� , W.� �o� �!�o$ �oV� '�o�������� ':�. :,�� �� ��<�� ��DPN� '���� q�$��& ���-
�����. J(� ����� �� a�C� �V� �� ��� ���X�.� ��:��" '�;�,� F;� ���N ����
���� �� '�,�, '�ow5 '�o�� �V� �� �(�IE� �CN �V� J(� '��������� ��������� .��5� ���� �� �(�;�,� ���& �. \�!�� �!,IN +�(���� ����$ :� �N�
���oo� ���X�oo.� �oo��� ���oo�g�� , +��oo� Woo.���ooN� . �oo�N��� �$i�oo<� �oo��!��$ , ���� �(��L���� '��F��N 9:�o�" �oC(�R �o� W�o.�E6 , �o=� '�o� ���� �� , ������]59 .[�,� ��'�; �� '�L(� �o� ���� F(�o�� �oN�� J(�o� �
���oo� 9:�oo�" �� �oo� ��oo%& '�oo�– 9,� :� ':�oo5 �oo����$ '�oo�PSO �( �!,IN +�(����,PSO ,RLSE ��� ���X�.� . '�o�������� �� �N�� J(��
�V� 9,� ��� �� a�C�PSO :� �o�( ��� �� �!�$ �V� '��������� , �( �!,IN +�(���� ��N��� �L(� �,���� '�;�,�RLSE �N�� ':�. :,��.
'�;�,� ��:��" J(��!�C� ��oD� #�=�|�$ �� � �$ �� ����� 9:��" '���W.� �(: ���S �� ���:
1. '�������PSO ��o� �!,IN +�(���� , a�C� �V� 9:��" �� '�!�$ �V� ]73 �75[
2. '�����oo��PSO #�ooP��� J(�oo��� , a�ooC� �ooV� 9:�oo�" ���!�$ �V� '��� ��<�:�� ]74[
6 Ant Colony 7 Off-Line

������� ��� �� ��� ����!" #�� ��$�� ������%& '�� �()��* +,��-.�� �/0 ��0�$ ��� �45�6 �...
���� '���& '�;��!� ���<$ ��=����0 �& �>!?(�@ 11
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
3. '�������PSO �Po.�$ J�!�o� �o��5 , a�C� �V� 9:��" ����5�( �!�$ �V� '���
�� ���!� �� �!�C� J(� �o��� ��o� '�oD0 :� �o� a�o. , a,� '�;�,� ����1 �o���D$ , ��(I� h��$ +���& ?PSO ���� ��;�F(�.
#�=�|�$ �(��� �� '�P� �V� �� '�o%�V� F�(��oL!� ���o� ��PSO �o�-
F(:����� F��� ���� ��<�� �(���" F�(��L!� J(� �� �$. 5 .����$�2H ��-�� (6��
#��m �,�� ��!,� '�� ��(� /.�$ ��Kennedy ) �&�o�� � B��<N�,� ( ,Eberhart )l�� B��;� (��� �( +���& �� �o�!�$ �� '�,�o| '��Io�
��;� �� �$��.�=� 9�� �� #i(��$ :� '���" �&�o�� � #i��oP$" �o� W�oEN '�;�(�N��$" ��5 Z��0���2 " �� ��(�]69[.
'�;(:�. ���� J�!,�]69[ '�o���� :� �O�o��]70[ ��o;� �o� �o� ���o� :� '�o���� a�N� #�m '��� +���N�� ��,�� '��E 9,�.
q�P(�. 9,� J(� /.�$]69 �71 �72[ ���;� 9,� �( �� �$ W5�( �P.�$ ':�.���;� a��� ���$��S��� \(��$ #��m ��,�� ':�..
��PSO h��o$ �o( �o( �!�E� �( '��E '�w5 �� ���. ��m '���P$ ���oS +" �� �� ���PS�� , ��� h��$ 9:�� +�I�� :� a��� �� , �N��� ��w6
Wo.� ���" ���� . Wo��6 ��m �o� Go� :� �o����$ B�o.� �o� �� ��o0 '�oP� �o� �,�� :� ��m ��* �( �( �� ��0 ���n� ���$ J(��;� , ��0 �P5 W�PS��
�(�� ��5��%$ ��(��| ����� '��n���� . �o� �� �PS�o� '�P� W��6-
��o��� ��N�.� a�N��. �� �� ��0 ��S W��6 #��m a��$ �� ��� . �a�N��o.�� � �;� +���N�� ��N��� �,�� ����E� �nK '��E �� q)�o��6� W�o. �o�
��� �����0 W��6 ���;� ��(I� h��$ . ��oP�� �o� ����o� �. :� �����$ B�.� �� �#��m �,�� �� ��m ��D �LN�o�� �o� �
�� ��E '�w5 ��P���� ���� �(��N �������� .:� ��$���& ������� J(�:
ix� :�P5 W�PS��
iP�
:��S W�PS�� J(��;�
iv� :W&�. �� �P5 W�PS�� �� �oDCN �o( �LN��� �� #�%�V� ����� �( +���& �� �N��$
��� ��=! �W.� ��E '�w5 . �o� �oP5 Wo�PS�� �F�(��oL!� ���o�$ �� ����� �� ���(:�� �.�� �( +���& . ;� Wo�PS�� J(� ��� '�o;��PS�� a�o�$ :� �o�
����o� �� +" #�o%�V� ����� ��S ��� ����iP�
�o� ��o�0m ��o� . J�o�g�� ��(I� h��$ ���C�iP�
a�o�� '�o�x�� �� �(� Pbesti ) J(�o�;� +��o�& �o�
1 Prediction Error 2 Individual Cognitive
���n� (��0m '�P� '������$ �� �E(�C� '��� �o� � ��o� . J�5�o( ��o� �o��!� �N�.� :,�� , ��;� '�;��PS��iP�
,Pbesti ������. +��� �5�|� �� �(� s�CNiv� ��ix� �� ���� a��S� ����,� F�(��L!� , ���
F�4�$ ��iv� �� �� +��$ �� �� ��(��Niv� Io�N �o�:��" a�o� �o( +���& ����� ��LN.
�o� #��m �o&��� �( :� ��<�� #��m �,�� �o��� ! �(�o;�$ �o� ��m �o( �o� �� �PS�o� ���;� , W5�<�� �WE�N ���� �� �!�E� �( \6 �(�N��$ q��(�C$-
C$ �L(��� �� #��m �� ��� ��o��� ��o��� \o��P$ , \o�� . \o6 F�(��oL!� Jo(� �o� \o��C$ J�o6 �� #��m '�o����5� :� ��o��P� ��o(�� �o( +���& �� ��!�E�
�� �� , �� �L(����(". �� �5�R ,� q)��P� W�P� �( �� #�R��$������ .��� �� ��P� +���i
�(�E��j ��� ��j �(�E�� I�Ni ��o� �o���0 . �� �oL(� #��m �o� ��m �o� �o� ���o� ����0 �N�L(�E�� W�PS�� J(��;� :� �O��� +"���5� , W.� s��$��
:� Wo.� #��o�& W�PS�� J(��;� J(�iP�
�o� �o� �(�oE�� J(�o�;� '��o�gP�
�� ����0 ���� �(��N . '��� F�EC$ ��=N , �L(��� �� #��m #�R��$�� ��=N
�o� +�o���� #�oR��$�� :� �N���oN�� '�;(^�!���$ ��(� W�. �� �� �� �;N"-
���. ��("�5 ��PSO�� F�4�$ ���� #��@ �� ��m �� W&�. � J(� �� ����
�5��%$ #�N�.�N d&�� ���3 PS�� ��6 '�;��gP� ,iP
� ��o� �o� . F�(��oL!� �(�� F�(��L!� ��(:PSO ���� ��.
1. �� �5��o%$ '�;�&�o. , �o;��PS�� �o� Wo�P� ��!,� ��� ���C� '�w5D ��E Z'�P�
2.�C6 j,��3.��� ���(:�� ��(I� h��$ ���m �� '���.4. 9:�� �� ��m �� 9:��Pbesti ���o� �oE(�C� ��o0 �� s����
��� ��;� ���Pbesti ,iP� �o|�6 ��o6 Wo�PS�� �o� �o �$ ��
��� J(IL(� .5.��m �(�.��� �� Wo�PS�� J(�o�;� �o� +�L(�oE�� W�P� �� '�
�m J(�o�;� +��o�& �o� +" +��o� ��o=! , Wo.� ���� ���$ �o� � G(�N�gbest.
6.�(: ',�E$ B�.� �� ��m W�PS�� , W&�. ���x$ :� � � �
� �� �� �� �
1
2
1
i
i i
pbest i
gbest i
v k v k
x x k
x x k
'
'
�
� ( �
� ( �
� � � � � �1i i ix k x k v k � �
)35(
3 Stochastic Oscillates
������� ��� �� ��� ����!" #�� ��$�� ������%& '�� �()��* +,��-.�� �/0 ��0�$ ��� �45�6 �...
12 ���� '���& '�;��!� ���<$ ��=����0 �& �>!?(�@
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
7. ���S ���)?��D$ �( q)��P�1 ���o�$ #�oP5� �����o6 �( v�0 (�� k��0 �C6 :� ��� ���,"��.
8.�C6 +�(��)i' #��oo@ �oo� �oo� Woo.� '���oo&� :� �5��oo%$ ����oo� �oo( �LN�oo��
�� �5��%$ , W0����(~ (0, )i iU c' ��� h(:�$�N�.)�L�&(�%�& �� �%�& v�| �LN��� �) �@� �VEN ��PSO ��,�o=� �� ��oE(�� ��m �� W&�. �maxV*
��=!���. 6 .�)�I�( ��� ���� �� �� ���(�� TDL - ���� /
ANFIS���� :� '�������� ��� �� �N�o�: '�;(�o. ����) :� Wo.� #��o�& �o�
��o� >o$�� �N�o�: >oE6 �o� �o� '��("�5 :� �� #����<� , �o(I$ , Wo.����� �� �N��: '�;(�. \�=$ �� s���� �(�� ��oR �o� , ����N \C�E� �� �N��
�����E��, F� �� �!� �N� .��(�� �.��� '��� , �� ��� �� �(�� '�,�, �o� �N,� , F�o�� �.��� , F����� �� F�E�. � ,�0 F�N���� �� q�5�@ , �����N ���&� \��S
F���� �����N �(�N��$ ~�� +" '�,�, ',� (.�& �D(��� �� �(� z�%V!�������� '��� �� '�L(� /(��� �( �(��E(� \��S :� ��o.i� '�� ����$ '
�� J�� :� ����� F���5 �(�� ��o(: �N�o�: '�;(�o. �o����(� �o� ���L��, �,��� W.� ��� ���X�.� ���E� �����]6[.
���� +,��-.�� �() ��* ��%& '��) �oXV� �o() �( �� \S��6 ( q�o�(�C$�� >.��� >(�C$ �� �� h��$ �� ���oP$ �o� +" �o� s,�o<� ���NI� J��V$ ��N��$
F�(��N ��4�� �XV� �() �� +,�N �5�� . �o�N �o� Wo!�6 �� �o�* �� F�N��o$ �o()�� �� �o;N,�N :�o�N ���o� ���oP$ , a:) ���oP$ ���o� �� '�4N ��;�� ~��
�� �D0 , �P. , ���$��R �� ��� �F�(���� ���� ��E(�� '�� � W; F�N��o$F(�," W.�� �� v�D� b(��N]5[.
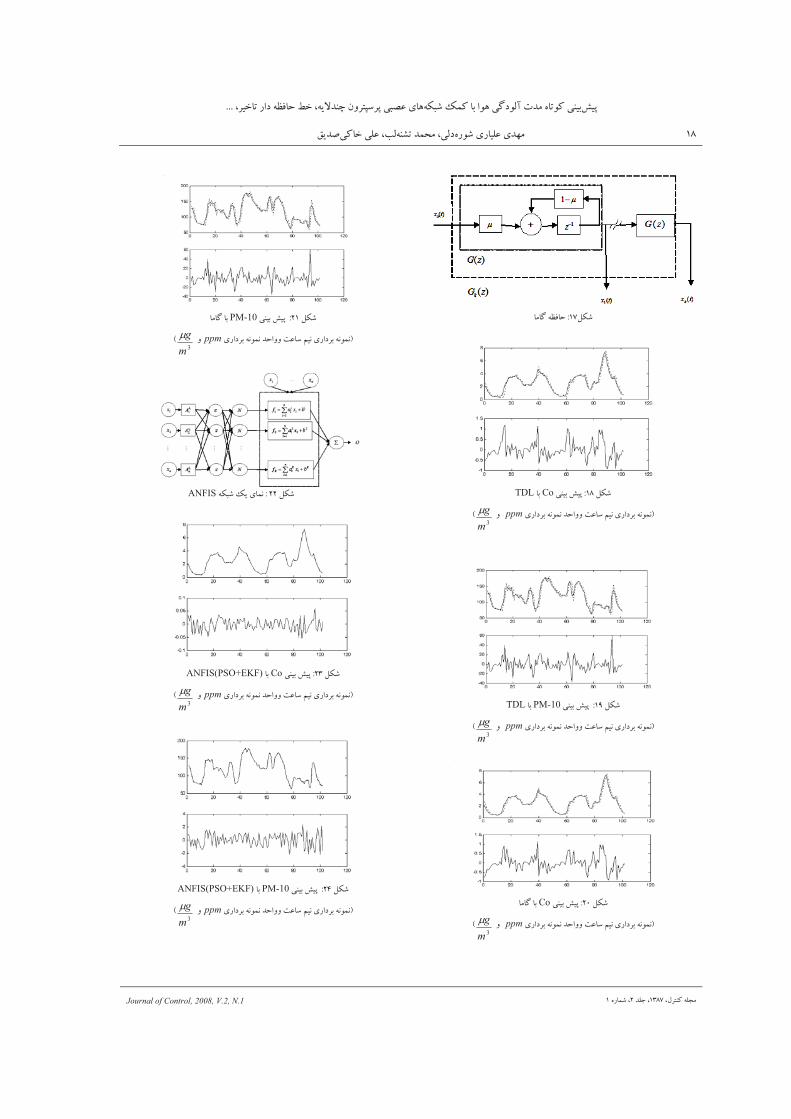
\�� �� '��)18 ( ,)19 (��� ���o� ��o., �o� �o��� TDL \�o� �� , '��)20 ( ,)21 ( ���� ���� ��., ������ J(� �� W.� ��5�� #��@ �� ��
,� 3 �� �() ����� ,��0�$ /0 �@��& �o��� �o��5 , Fo�, �N�o�� �o()�� Fo� �N�����w6 � ,�0 �()�� J��g�� �o� �oD0 �o ,�0 �o() �o���. Jo(���
9,� �� �;N,�N ���P$) '�,�, �(4 �N��� �() �70 , � ,�0 �()1 ������. ' �;N:, 9:��" >(�|w����� 005/0 '���TDL ��o� v�oV�N� �o��� ,
W.� . 9:��" >(�| �45�6 �����5 '���002/0 ���oC� , �o��� ��3k W.� ��� ��5�� �4N�� . '�;�� ��)23 ( ,)24 (��� ��.�� ����ANFIS
��:��" 9,� ��PSO+EKF Wo.� ��5�� #��@ . ���� :� 9,� Jo(� ��-
�$ '��4 ��� '��� '�,�, +���& �� \�S �4=! ��o� ���X�o.� ��oP� �4=! ����
1 Fitness
'�,�, �� '��� , W.�3 Wo.� ��o� ��5�� �4N �� ?P$ h��$ . ��o�� Wo�P� '��� ��5�PSO �10 �� ��m����.
6 .1 . 9����-2 �J)�
�,� +��� �E(�C� , ���(:�� '���'�; ��o� , ':�oE!�� #,�oX�� �o� �o����N�� �.���� �. ��5�� �4N �� �� �(: ���P� W.� ���]10�11 [.
- '�D0 #�P��� J�LN��� �n (RMSE)2 ��� ���� - �I�!���N '�D0 #�P��� J�LN���(MNSE)3 ��� ���� - '�D0 ?D� ��S J�LN���(MAE)4��� ����
�� _(�P$ �(: #��@ �� �����P� �� �N��.
)36 ( 2
1
1 ˆ( ( ) ( ))N
iRMSE x i x i
N
�
+" �� ��x �:��N� ���C� , ��� '���x ��� ���C� �� ��� ���� �o� �o��� o� '�oD0 #�oP��� J�LN��� �n >�$�$ J(��� ��o� �:�o� a�o�$ �� �o��� �o���
��� ���(:�� '��� '���P� +���& �� , ��� ��.�=� �� ��� �� ���� �N,�. ��� ����& +��� �E(�C� '��� ���� '��� ���� �#,�X�� '�� ���� GN�o(��, �o�
��� �� �I�!���N '�D0 #�P��� J�LN��� �� �+��.�I�!���N '��� '���P� +���& ���� ���� ���. _o(�P$ �o(: #��o@ �o� �I�!�o��N '�D0 #�P��� J�LN��� ���P�
�� ���.
)35 ( 2
1
2
1
ˆ( ( ) ( ))
( ( ) ( ))
N
iN
i
x i x iNMSE
x i x i
�
�
�0" ���P� W(�;N �� , ���.���P� �� �o� '�o$ �o���� �o@�5 +�Io�� J�LN�o�� '��� �(��C� :� �@� �(��C� ����W.� ��@ �� ��.�=� �C(�R ,W.� �(: #.
)36 ( 1
1 ˆ ( ) ( )N
iMAE x i x i
N
�
�,�� ��)1 ( ,)2 (W.� ���" �;�,� ����$ �� �E(�C�. 7 . (��� � ��<
':�5 ���� , ��%& ���� J(��* '�;�(�N��$ �E(�C� �� a��S� �!�C� J(� ��ANFIS F(���N .�;�,� '������� �� J��g�� B�o.� �o� �����$ ��:��" '
PSO ���� '���ANFIS Wo5�� #��o@ ���o� J(� b(��N ���;� �� �P. . �����N J(� �� J��g�� ��� �o45�6 ��o%& '�o� ���o� ')�� �(�N��$ +�I�� ��
�o� �N�o�: '�;(�o. �o����(� ':�oE!�� �� �45�6 +,�� '�� ���� �� W�EN��F(��. �� �(��oC� ���o� +�Io�� :� >oD� J(� '�;!,�o )1 ( ,)2 ( qi��o�
'�;(:�E!�� �� �� +" �(�N��$ , ��%& +��� ��� �45�6 #��S , W.� ��;<�
2 Root Mean Squared Error 3 Normalized Mean Squared Error 4 Mean Absolute Error

������� ��� �� ��� ����!" #�� ��$�� ������%& '�� �()��* +,��-.�� �/0 ��0�$ ��� �45�6 �...
���� '���& '�;��!� ���<$ ��=����0 �& �>!?(�@ 13
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
�N�L���" ���E� ��.����$� �D0 ��� �� W�EN �o�� �� +�<N �� J�o�g�� , �*�� �(��C�)�N�����0�� ��� �(��C� :� �� ���� �� ���L�� ( ?�<� 9,�
�� ��;� �,� ?�<� 9,� �� W�EN a,���� �� v. �oL(� Fo;� ���N ��m ���!� ��o;* �o;�$ ��� �����(� '�� ���� �� �� W.� '�,�| I�N4 �o� \o�S �o4=!
�o0�� '�o;�����(� �� � �$ �� ���� , W.� ��� ���� ���� �� '�,�, +���&��(��N �� \�S #�4=! >.��� '�;(�,�, '��n� +:, , J��P$ �� a��S� . >D�
�� ���� 9:��" �L(� F;� #��@ �� , �!,IN +�(���� ��� �� ���� 'on-
line W.� ��� �(��� �!�C� J(� �� �� ���� �� . �o!�C� J(� �� �L(� F;� ���N ���o� '��� >.��� ��:��" 9,� '������� ��o%& '�o�- ':�o5ANFIS
�� B�o.� �� �����$ '�;�,� '������� �� �� ����PSO ���oP!� l�o5 b(�o�N��� �� �E(�C� �� ���0������(� ��%& '�� �o� \@�6 ���� , ��� �o� ��o�
Wo.� '�o�L�� \o��S �R���� �,�� �� b(��N . , '�����o�� �oL(� Fo;� �o��N+��I�� , ��5�( �P.�$ J�!�� ���5 ':�.PSO �V� 9:��" '��� a�oC� '�� �!�$ ,ANFIS �� �(�oN��$ qio�& �o�:��" >o���$ Jo(� ��� +�<N �� �����
?��D$ �� ��.������� B�.� �� '���������W.���� )�� �����(� �� �(��.
KL��� 1 .a . ��:" ��L<N�� ��& #���<�N� I��� � �,� � � WE(: /�=� �.��;� � ��-.��&
�,� ��* � ��i.�1371 . 2. P. Mlaker and M.Boznar, Percptron Neural Network – Based Model Predicts Air Pollution, IEEE, World Congress, 1997. 3. Haykins, S, Neural Network A Comprehensive Foundation, Prentice- Hall International, 1999.
4. a . v . ���o<N�� � �,� �o ��$��o.�=� 9�o�� ��o%& '�o� ���� �N��� � k�;�� I�(�� ��������� ��P�@ ��L<N�� #���<�N� � �������� ��P�@ ��L<N��1381 .
5. G.Dorffner, Neural Networks for Time Series Processing, Report, 1995.
6 . � . ��(n� ��DPN� ��%& '�� ���� ':�. ����� , '���(�� \�=$, �(I$ � �(�" ��. � '���� �!�.� � #�C�C=$ a�& �6�, ��i.� ��:" ��L<N��81-1380 .
7. J.J Kao and S.S.Hung, Forecasting Using Neural Network versus Box-Jenkins Methodology for Ambient Air Quality Monitoring Data, Air & Waste Management Association, Vol. 50, pp. 219-226 , 2000 . 8. A.B.Chelani, D.G.Gaighate, and M.Z.Hasan, Prediction of Ambient PM10 and Toxic Metals Using Artificial Neural Networks, Air & Waste Management Association, Vol. 52, pp. 805-810, 2002.
9 . a . a , '���V� . , �� �$ � '��� . '��������� �(���V� '��@MATLAB ,SIMULINK �,� ��* � +�.��0 #���<�N� � �.��;� ��1380.
10. U.Schlinnk, S.John and O.Herbarth, Transfer – function Models Prediction Ozon in Urban Air, UFZ-Center for Enviromental Research Leipzig – Halle Ltd, Leipzig, Germany, 2002.
]11[ a . J�o� �L�oE��� �o� �o.������ '�� ���� �N��: '�;(�. ���� ��� � +��N��:�R J(�!���%N � ��0 ��P�@ ��L<N�� ��� ���� ��. � ���� ���N +�(�� � �.1380.
[12] C. Chatfield, The analysis of time series: An Introduction, Chapman & Hall, 1989. [13] O. Nelles, Nonlinear system identification, Springer- Verlag, 2001. [14] http://www. Aqcc. org, Air Quality Control Company, Copyright 2001. [15] G. Dorffner, Neural Networks for Time Series Processing, Neural Network World, Vol. 4, pp. 447-468, 1996. [16] T. J. Cholewo, J. M. Zurada and A. Cchoci, Exact Gradient Calculation in Gamma Neural Networks, International Symposium on Nonlinear Theory and its Applications, 1997. [17] M. Van Veelen, J. A. G. Nijhuis and L. Spaanenburg, Estimation of Linear Filter Banks for Multi Variate Time Series Prediction with Temporal Principal Component Analysis, Report, 1997. [18] J. C. Principe, J. M kuo and S. Celebi, An Analysis of the Gamma Memory in Dynamic Neural Networks, IEEE Transactions on Neural Network, Vol. 5, No 2, pp. 331-337, 1994. [19] B. de Vries and J. C. Pricipe, The Gamma Model-A new Neural Model for Temporal Processing, Report 1992. [20] J. C. Pricipe, B. de Vries and P. G. deOliveria, Generalized Feedforward Structures: A New Class of Adaptive Filters, Computational Neuroengineering Laboratory Report, 1995. [21] Yu Heeyeol and S. Y. Bang, An improve time series prediction by applying layer by layer learning method to FIR neural network, ICONIP, 1996. [22] S. Celebi, J. C. Pricipe, Analysis of spectrel Feature Extraction Using the Gamma Filter, Univ Florida, 1994. [23] A.B. Chelani, C.V.C. Rao, K.M. Phadke and M.Z. Hasan, Prediction of sulphur dioxide concentrations using artificial neural networks, Environmental Modelling and Software, Vol. 17, pp. 161–168, 2002. [24] G. I. Berastegi, A. Elias, A. Barona, J. Saenz, A. Ezcurra and J. D. Argandoña, From diagnosis to prognosis for forecasting air pollution using neural networks: Air pollution monitoring in Bilbao, Environmental Modelling & Software, Vol. 23, pp. 622-637, 2008. [25] G. Nunnari, A.F.M. Nucifora and C. Randieri, The application of neural techniques to the modelling of time-series of atmospheric pollution data, Ecological Modelling, Vol.111, pp. 187–205, 1998. [26] G. Soja and A.M. Soja, Ozone indices based on simple meteorological parameters: potentials and limitations of regression and neural network model, Atmospheric Environment Vol. 33, pp. 4299–4307, 1999. [27] R. Guardani, C.A.O. Nascimento, M.L.G. Guardani, M.H.R.B. Martins and J. Romano, Study of atmospheric ozone formation by means of a neural network-based model, Journal of the Air and Waste Management Association Vol. 49, pp. 316–323, 1999. [28] J.A. Cannon and R.E. Lord, Forecasting summertime surface-level ozone concentrations in the Lower Fraser valley of British Columbia: an ensemble neural network approach, Journal of the Air and Waste Management Association, Vol. 50, pp. 322–339, 2000. [29] M.W. Gardner and S.R. Dorling, Statistical surface ozone models: an improved methodology to account for

������� ��� �� ��� ����!" #�� ��$�� ������%& '�� �()��* +,��-.�� �/0 ��0�$ ��� �45�6 �...
14 ���� '���& '�;��!� ���<$ ��=����0 �& �>!?(�@
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
nonlinear behaviour, Atmospheric Environment 34, pp. 21–34, 2000. [30] Jehng-Jung Kao and Shang-Shuang Huang, Forecasts using neural network versus Box–Jenkins methodology for ambient air quality monitoring data, Journal of the Air and Waste Management Association, Vol. 50, pp. 219–226, 2000. [31] W.G. Cobourn, L. Dolcine, M. French and M.C. Hubbard, A comparison of nonlinear neural network models for ground-level ozone forecasting, Journal of the Air and Waste Management Association, Vol. 50, pp. 1999–2009, 2000. [32] A.L. Dutot, J. Rynkiewicz, Fredy E. Steiner and J. Rude, A 24-h forecast of ozone peaks and exceedance levels using neural classifiers and weather predictions, Environmental Modelling and Software, Vol. 22, pp. 1261–1269, 2007. [33] M.W. Gardner and S.R. Dorling, Artificial neural networks (the multilayer perceptron). A review of applications in the atmospheric sciences, Atmospheric Environment, Vol. 32, pp. 2627–2636, 1998. [34] A. Comrie, Comparing neural networks and regression models for ozone forecasting, Journal of the Air and Waste Management Association, Vol. 47, pp. 653–663, 1997. [35] G. Spellman, An application of artificial neural networks to the prediction of surface ozone concentrations in the United Kingdom, Applied Geography, Vol. 19, pp. 123–136, 1999. [36] U. Schlink, S. Dorling, E. Pelikan, G. Nunnari, G. Cawley, H. Junninen, A. Greig, R. Foxall, K. Eben, T. Chatterton, J. Vondracek, M. Richter, M. Dostal, L. Bertucco, M. Kolehmainen and M. Doyle, A rigorous inter-comparison of ground-level ozone predictions, Atmospheric Environment, Vol. 37, pp. 3237–3253, 2003. [37] U. Schlink, O. Herbarth, M. Richter, S. Dorling, G. Nunnari, G. Cawleyd and E. Pelikan, Statistical models to assess the health effects and to forecast ground-level ozone, Environmental Modelling and Software, Vol. 21, pp. 547–558, 2006. [38] Sameer Sharma, S.V. Barai and A.K. Dikshit, Studies of air quality predictors based on neural networks, International Journal of Environment and Pollution, Vol. 19, pp. 442–453, 2003. [39] B.M. Fernandez de Castro, J.M. Prada Sanchez, W. Gonzalez Manteiga and M. Febrero Bande, Prediction of SO2levels using neural networks, Journal of the Air and Waste Management Association, Vol. 53, pp. 532–539, 2003. [40] A.B. Chelani, C.V.C. Rao, K.M. Phadke and M.Z. Hasan, Prediction of sulphur dioxide concentrations using artificial neural networks, Environmental Modelling and Software, Vol. 17, pp. 161–168, 2002. [41] M.W. Gardner and S.R. Dorling, Neural network modelling and prediction of hourly NOx and NO2concentrations in urban air in London, Atmospheric Environment, Vol. 33, pp. 171–176, 1999. [42] Faizal A. Hasham, Warren B. Kindzierski and Stephen J. Stanley, Modeling of hourly NOx concentrations using artificial neural networks, Journal of Environmental Engineering and Science, Vol. 3, pp. 111–119, 2004. [43] C. Cappa, D. Anfossi, M.M. Grosa and P. Natale, Short-term prediction of urban NO2 by means of artificial neural network, International Journal of Environment and Pollution, Vol. 15, pp. 483–496, 2005.
[44] M. Kolehmainen, H. Martikainen and J. Ruuskanen, Neural networks and periodic components in air quality forecasting, Atmospheric Environment, Vol. 35, pp. 815–825, 2001. [45] Harri Niska, T. Hiltunen, A. Karppinen, J. Ruuskanen and M. Kolehmainen, Evolving the neural network model for forecasting air pollution time series, Engineering Applications of Artificial Intelligence, Vol.17, pp. 159–167, 2004. [46] S.M. Shiva Nagendra and Mukesh Khare, Artificial neural network based line source models for vehicular exhaust emission predictions of an urban roadway, Transportation Research Part D, Vol. 9, pp. 199–208, 2004. [47] J. Hooyberghs, C. Mensink, G. Dumont, F. Fierens and O. Brasseur, A neural network forecast for daily average PM10 concentrations in Belgium, Atmospheric Environment, Vol. 39, pp. 3279–3289, 2005. [48] J.B. Ordieres, E.P. Vergara, R.S. Capuz and R.E. Salazar, Neural network prediction model for fine particulate matter (PM2.5) on the US–Mexico border in El Paso (Texas) and Ciudad Juarez (Chihuahua), Environmental Modelling and Software, Vol. 20, pp. 547–559, 2005. [49] G. Grivas and A. Chaloulakou, Artificial neural network models for prediction of PM10 hourly concentrations, in the Greater Area of Athens, Greece, Atmospheric Environment, Vol. 40, pp. 1216–1229, 2006. [50] A. Zolghadri and F. Cazaurang, Adaptive nonlinear state-space modelling for the prediction of daily mean PM10 concentrations, Environmental Modelling and Software, Vol. 21, pp. 885–894, 2006. [51] T. Slini, A. Kaprara, K. Karatzas and N. Moussiopoulos, PM10 forecasting for Thessaloniki, Greece, Environmental Modelling and Software, Vol. 21, pp. 559–565, 2006. [52] W. Wang, W. Lu, Xiekang Wang and Andrew Y.T. Leung, Prediction of maximum daily ozone level using combined neural networks and statistical characteristics, Environment International, Vol. 29, pp. 555–562, 2003. [53] J-S.R. Jang ANFIS: Adaptive-Network-Based Fuzzy Inference System. IEEE Trans. on Systems, Man and Cybernetics, Vol. 23, pp. 665-685, 1993. [54] P. Werbos, beyond regression: New tools for prediction and analysis in the behavioral sciences, PhD thesis, Harvard University, 1974. [55] J. S. R. Jang, C.-T. Sun. and E. Mlizutani, Neurofuzzy and soft computing: a computational approach to learning and machine intelligence, Prentice Hall, 1996. [56] S. Shah, F. Palmeieri, and M. Datum, Optimal filtering algorithms for fast learning in feedforward neural networks Neural Networks, Vol. 5, 779–787, 1992. [57] S. Singhal and L. Wu, Training multilayer perceptrons with extended kalman filter algorithm, In Davis S. Touretzky, editor, Advances in neural network information processing systems I, pp. 133-140. Morgan Kaufman Publishers, 1989. [58] D. Simon, Training fuzzy systems with the extended Kalman filter, Fuzzy Sets and Systems, Vol 132, 189 – 199, 2002. [59] M. S. Chen, A Comparative Study of Learning methods in Tuning Parameters of Fuzzy Membership Functions, IEEE Conf. on Sys. Man and Cybernetics, 1999. [60] D. B. Parker, Optimal algorithm for adaptive networks: Second order back propagation, second order direct

������� ��� �� ��� ����!" #�� ��$�� ������%& '�� �()��* +,��-.�� �/0 ��0�$ ��� �45�6 �...
���� '���& '�;��!� ���<$ ��=����0 �& �>!?(�@ 15
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
propagation, and second order Hebbian learning, In proc. Of IEEE International Conference o n Neural Networks, Pages 593-600, 1987. [61] A. Chatterjee , K. Watanabe, An optimized Takagi-Sugeno type neuro-fuzzy system for modeling robot manipulators, Neural Comput & Applic , Vol. 15, No. 1, 55 61, 2006. [62] C. Karakuzu, Fuzzy controller training using particle swarm optimization for nonlinear system control, ISA Transactions Vol. 47, 229–239, 2008. [63] S. E. Fahlman, Faster-learning variations on back propagation: an empirical study, Proc. Of the 1988 Connectionist Models Summer School, Pages 38-51, Carnegic University, 1988. [64] R. L. Watrous, Learning algorithm for connectionist network: applied gradient methods of nonlinear optimization, In Proc. Of IEEE International Conference on Neural Networks, pages 619-627, 1991. [65] R. Babuška, H. Verbruggen, Neuro-fuzzy methods for nonlinear system identification, Annual Reviews in Control, Elsevier, pages: 73-85, 2003. [66] C. F. Juang, A TSK-type recurrent fuzzy network for dynamic systems processing by neural network and genetic algorithm, IEEE Trans. Fuzzy Systems, Vol. 10,No. 2, pp. 155-170, April, 2002. [67] C. Juang, Y. Liou, TSK-Type Recurrent Fuzzy Network Design by the Hybrid of Genetic Algorithm and Particle Swarm Optimization, IEEE International Conference on Systems, Man and Cybernetics, 2004. [68] Clerc M., Kennedy J., The Particle Swarm – Explosion, Stability, And Convergence in a Multidimensional Complex Space, IEEE Trans. on Evolutionary Computation, Vol. 6, No. 1, Feb 2002. [69] Kennedy, J., & Eberhart, R. C., Particle swarm optimization. In Proceedings of the IEEE international conference on neural networks, 1995. [70] Heppner, H., & Grenander, U., A stochastic non-linear model for coordinated bird flocks, AAAS, 1990. [71] Eberhart, R. C., & Kennedy, J., A new optimizer using particle swarm theory. In Proceedings of the sixth international symposium on micro machine and human science, 1995. [72] Eberhart, R. C., Simpson, P. K., & Dobbins, R. W., Computational intelligence PC tools. Boston: Academic Press, 1996. [73] M. Aliyari. Sh, M. Teshnehlab, A. K. Sedigh, A Novel Training Algorithm in ANFIS Structure, American Control Conf., 2006. [74] M. Aliyari. Sh, M. Teshnehlab, A. K. Sedigh, A Novel Hybrid Learning Algorithm for Tuning ANFIS Parameters using Adaptive Weighted PSO, IEEE Int. Fuzzy Sys. Conf., 2007. [75] M. Aliyari. Sh, M. Teshnehlab, A. K. Sedigh, Identification using ANFIS with intelligent hybrid stable learning algorithm approaches, Neural Comput. & Applic, 2008. [76] Fujita, S.; Tamura, H., Development of a Short-term Prediction Model for Predicting Photochemical Oxidants in a Local Area, SICE-ICASE, 2006. [77] Castro, J.R.; Castillo, O.; Melin, P.; Rodriguez-Diaz, A., A hybrid learning algorithm for Interval Type-2 Fuzzy Neural
Networks in time series prediction for the case of air pollution, NAFIPS 2008. [78] Tanaka, K.; Sano, M.; Watanabe, H., Modeling and control of carbon monoxide concentration using a neuro-fuzzy technique, Fuzzy Systems, IEEE Transactions on Volume 3, Issue 3, Aug. 1995 Page(s): 271 – 279. [79] Sungshin Kim; Jaeyong Kim; Chong-Bum Lee; Min-Young Kim, Fuzzy decision support system to the prediction of ozone concentrations, ISIE 2001. [80] Morabito, F.C.; Versaci, M., Prediction and estimation of atmospheric pollutant levels by soft computing approach, IJCNN 2001. [81] Tanaka, K.; Sano, M.; Watanabe, H., Identification and analysis of fuzzy model for air pollution-an approach to self-learning control of CO concentration, Industrial Electronics, Control, Instrumentation, and Automation, 1992. [82] Negnevitsky, M.; Kelareva, G., Air quality prediction using a neuro-fuzzy system, Fuzzy Systems, 2001. [83] Yilmaz Yildirim, Mahmut Bayramoglu, Adaptive neuro-fuzzy based modelling for prediction of air pollution daily levels in city of Zonguldak Chemosphere, Vol. 63, pp. 1575-1582, June 2006. [84] Francesco Carlo Morabito, Mario Versaci, Fuzzy neural identification and forecasting techniques to process experimental urban air pollution data Neural Networks, Volume 16, , pp. 93-506, April-May 2003. [85] M. Aliyari. Sh, M. Teshnehlab, A. Khaki. Sedigh, Climate short term prediction of air pollution using multi layer perceptron neural networks, Third Regional & First National Conf. on Climate Change, 2003. [86] M. Aliyari. Sh, M. Teshnehlab, A. Khaki. Sedigh, Short term prediction of air pollution using TDNN, Conf on Intelligent Systems CIS2004. [87] M. Aliyari. Sh, M. Teshnehlab, A. Khaki. Sedigh, Short term prediction of air pollution using MLP & Gamma neural networks , UKACC2004.
8 . �-�%L - �����
\��1 :�6 '���� ���x$ \�=$ �����N:#����x$ � Co

������� ��� �� ��� ����!" #�� ��$�� ������%& '�� �()��* +,��-.�� �/0 ��0�$ ��� �45�6 �...
16 ���� '���& '�;��!� ���<$ ��=����0 �& �>!?(�@
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
\��2: #����x$ �:�6 '���� ���x$ \�=$ �����N PM-10
\��3: E��� �P� �����N �L� Co
\��4: �L�E��� �P� �����N PM-10
)��(n� #��@ ':�. ��(�S ��=� �� W�EN �(��(
\��5: ��N����! '��N �����N Co
\��6: ��N����! '��N �����N PM-10
\��7: ���. ��0�$ /0 �(
\��8: , ��0�$ /0 >���$MLP
\��9: ���� ���Co ��MLP1

������� ��� �� ��� ����!" #�� ��$�� ������%& '�� �()��* +,��-.�� �/0 ��0�$ ��� �45�6 �...
���� '���& '�;��!� ���<$ ��=����0 �& �>!?(�@ 17
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
\��10: ���� ���PM-10 ��MLP1
\��11: ���� ���Co ��MLP2
)'����� �N��N �6�,, W&�. F�N '����� �N��N ppm , 3mg�(
\��12: ���� ��� PM-10 ��MLP2
)'����� �N��N �6�,, W&�. F�N '����� �N��N ppm , 3mg�(
\��13: ��� ��. '���$ '��� �� ���0�.
\��14: ��� �45�6 ���� �� ���0�.
\��15: ��� �45�6 G����. �(
\��16: ���5 �(FIR ���.
������� ��� �� ��� ����!" #�� ��$�� ������%& '�� �()��* +,��-.�� �/0 ��0�$ ��� �45�6 �...
18 ���� '���& '�;��!� ���<$ ��=����0 �& �>!?(�@
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
\��17: ���� �45�6
\��18: ���� ��� Co ��TDL
)'����� �N��N �6�,, W&�. F�N '����� �N��N ppm , 3mg�(
\��19: ���� ��� PM-10 ��TDL
)'����� �N��N �6�,, W&�. F�N '����� �N��N ppm , 3mg�(
\��20: ���� ��� Co ������
)'����� �N��N �6�,, W&�. F�N '����� �N��N ppm , 3mg�(
\��21: ���� ��� PM-10 ������
)���� �N��N'����� �N��N �6�,, W&�. F�N '� ppm , 3mg�(
\��22 : ���� �( '��NANFIS
\��23: ���� ��� Co ��ANFIS(PSO+EKF)
)'����� �N��N �6�,, W&�. F�N '����� �N��N ppm , 3mg�(
\��24: ���� ��� PM-10 ��ANFIS(PSO+EKF)
)��N'����� �N��N �6�,, W&�. F�N '����� �N ppm , 3mg�(

������� ��� �� ��� ����!" #�� ��$�� ������%& '�� �()��* +,��-.�� �/0 ��0�$ ��� �45�6 �...
���� '���& '�;��!� ���<$ ��=����0 �& �>!?(�@ 19
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
�,� 1 :J�����E���� '��� �;�,� ��� �E(�C� Co AR MLP1 MLP2 TDL Gamma
RMSE 3287/2 4960/0 4446/0 4159/0 4003/0NMSE 8168/0 1194/0 0959/0 0786/0 0729/0
MA 0454/1 3860/0 3278/0 3006/0 2898/0
�,� 1)����� :(J�����E���� '��� �;�,� ��� �E(�C�
Co ANFIS (GD+RLS)
ANFIS (PSO+GD)
ANFIS (PSO+RLS)
ANFIS (PSO+EKF)
RMSE 4048/0 4236/0 08159/0 0734/0NMSE 0743/0 0825/0 0051/0 0034/0
MA 2961/0 3143/0 0983/0 0882/0
�,� 2 :�m '����;�,� ��� �E(�C�?P� #� PM10 AR MLP1 MLP2 TDL Gamma RMSE 6211/26 5388/14 9112/16 5487/13 5472/13NMSE 5764/0 2128/0 2880/0 1915/0 1915/0
MA 3643/20 0029/10 0472/12 5925/9 5920/9
�,� 2 )����� :(?P� #��m '����;�,� ��� �E(�C�
PM10 ANFIS (GD+RLS)
ANFIS (PSO+GD)
ANFIS (PSO+RLS)
ANFIS (PSO+EKF)
RMSE 9738/12 5879/14 9365/4 8831/3 NMSE 1215/0 2643/0 0537/0 0273/0
MA 7631/8 6875/11 5673/5 4365/4
��� �� � 1387� �2����� �1�=X@ �25-20
I S ICE
Journal of Control, 2008, � Iranian Society of Instrument & Control Engineers http://www.isice.ir ������ ��1387S� ��I�� , ����� +�.��;� J�N� ��+��(� ?
���� 2! �9��M� ���)��J�(6�� N�J�� O��� �� (����.�� (�� G��!,��� ���5 '��(��0 ���.
+��;$ ��L<N�� ��.��;� , ��5 ���<N�� [email protected], [email protected]
________________________________________________________________�%��+ :F�E�. �( ��� �� �!�C� J(� �� �� #��@ ���� �� ���(��E� \�& ':�5 ���� . a�L�� �� ���� �� �� �� ��5��$
�� h(:�$ +:���� ��R �� ���� '����N ',� �� ����(��E� ��� . ����� W5�(�� ���� :� �� �$�&iR� ��,��$ ��R �� �4N ���� ':�5 F�E�. �� ��� , ��5�� F��%$ ���� ���5��$ W�P|, ���� �� +" B�.� �� ,F� '��� �� ��5��$ �� �$ ��.�5 .���� b(��N �+�(�� �� �;(:�.
W.� ��� �E(�C� �L(� 9,� ��* �� �4N ���� ':�5 F�E�. ������ , ��5�� ���S �.��� , \�=$ ���� .�� ��(� :� F�E�. J(� �� ���W.� �����0�� �()�� �$���& +��$ , �("���.
�^�, '��� '��: �(��E� �':�5 F�E�.��� ���� ��C��D$ ���(��E� '�$��-��� '��
Abstract: In this paper, routing in computer networks is performed using a fuzzy logic strategy. The present network traffic is evenly distributed during the routing. The fuzzy based system will periodically receive the information from the network and based on this information will divert the load to other parts of the network. Simulation results are used to show the performance of the proposed method and comparison results are also provided.
Keywords: Fuzzy system, Routing, Adaptive Routing, Computer Networks. ________________________________________________________________
1 . ��%9�
� �� � �$ ������� :,��:,� 9��E� , W5�< �(�Io5� , '�$��-��o� '������: �.��. �� �;N" �� :��N ��(��E� d=� ����1 W.� W���� I]�6 . ,� J(� :�
�o� �oX(� �o���: J(� �� �.�.� �CN ���� ����� �� s���� '�;����$ �o��� .��E� ���(��E� ���� '��2 �o.�.� , Fo;� \(�oE� :� �o�( ��o��� '�o;����$
���� +�,��o5 ��Opo$ ���o� �("��o� ',� �o� �o� Wo.� ���o� . ��oC�N� �!�oE���E� ���� '�� ���� �� ��oE� �o�5��$ ����� J��g�� , '�$��-��� '�� ��o�
�o� :� , Wo.� ���o� Fo& J�oCC=� �o �$ ���o� , Fo;� \(�oE� :� ��( ���o� a�oN� �� �N�,��5 #�C�C=$ �� , �� �� W.� �(�E� �o���: +�o�g��
����E� '�;�.��� , ?�C=$'��(: ���� �� , +" �� . ����o� \� '^�!���$ :� jiR� +,�� �(�� ���(��E� v�0 F�(��L!� �(
��� , J(��;����� ���� �� ��E� J(�$ . W�Po|, B�o.� �o� ��oE� J(�o�;� J(�#�ooR��$�� +�oo� v��oo0 Ioo�N , ���oo� �oo��5��$3 �oo� �oo�� �oo� ���oo� +,��
#����x$ �� ���� +,�� ��(^�!���$ �� ���x$ ���� ��� .
1 Routing2 Packet3 Link
2 .���)��J� �"PJ� �� (2-�� 2.1 .���)��J� (����)2�Q"�
F�(��L!� :� ��( �:,��� ���o� �� ���(��oE� a�o.�� , v�o0 '�� '�o�W.� ��E� J(����$�� +��� ���� ��R��$�� .F�(��L!� J(� �� J(����o$�� ���
���! ��(I� B�.��� ��E�4 �.�=��� � ��o�]5 .[ F�(��oL!� J(����o$�� '�o� ��$��.� ���E�����E� �o�5�� �o4N �� Wo��O �o��! �o�(I� �o� \�� J(� ��
�� ����N ��.��$ W�PS�, �� ���!� �� ��� . �� F�(��oL!� �� W.� +" �L(� ���W5�� �4N �� ��$��.� ���N . �$�� �( �� �� �;���! ��(I� �� \�� J(� ��
�� , ����N ��.�=� {�5 W��O �� +" �N��: ��$�� �@�5 �(��� :� G� , �o�(I� ��� �UV<� �N��: �@�5 W�n� �o� �� �o� #��o��x$ �o$ ��o� :,�
��o=! ���o� �o�5��$ J�o�g�� , ���o� '�;����0 �( ��(^�!���$ �!���6���� .F�(��L!� '�o�� F�EC$ ��.� ,� �� ���& ��R �� ��E� J(����$�� '���� �N�� :�5 ����� �o@5 ) F�(��oL!� +�o�� �o�Bellman-Ford Wo.� ( ,
���! W!�66]5 .[W.� ��� ���X�.� �@�5 ����� F�(��L!� :� �^,�� J(� ��.
4 Link Cost5 Distance-Vector6 Link-State

�E����� �� �C��D$ ���(�':�5 F�E�. B�.� �� '�$��-��� '�� �G��!,��� ���5 '��(��0 ���. ��
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
#�o&iR� ��o��! Wo!�6 F�(��oL!� �o� �oE(�C� �� �o@�5 ����� F�(��L!��� ���0m ��0 �� �� '�������E� ��� . �,� �� ��@�5 ����� F�(��L!� ��
�� �� ���(��E� +" �o$ ����V$ �@�5 ��%C� ��N #�&iR� '���� ���� ��N a�o� �� �o� '��oN J�o�g�� , Wo.� ��oN +" �� +��.� ��(I� +��� �� ��N
W.� ��� ���0m ��,�� +" �� �(�� '�P�]5 .[ �o� �o@�5 J(����o$�� ��o.�=����! ��(I� F����� +��� ���� B�.� Wo.� �o%C� �o$ �� . �� ��o<�� #�o�]I
�L!� ����:�� �� ��E� J(����$�� F�(� �� +��$]2,5 [���N �46i� . ���! ��(I� ��!�C� J(� �� ��� a�N� ':�. ����� �� �� ��1 ���� �( ��N�O
�� :,� �� ��N�.
2.2 .���)��J� (������2�� �� �� '������� J(�$ ���. ���(��oE� Wo�X�� ���o(:�� '��� +��$�� �o4N
� F;� '�;���%$ J��g�� , W5�� +" B�o.� �� �� ���(��E� �LN�L* '����� a�N� �o��� ���� ��oE� �o� �o� Wo.� �(�;��oS ���P$ � ���� . '�o��������
���! ��0p$ \��S :� '�L(� ���! �N�� {�& ��� _@ I(�. ���1 �� �o��! ,��E� h(:�$ ��0p$ �( �� �� ���� �� , ��� ���(��oE� ��o=N �("��� �� �N��$���n� �(�IE� ��O�$. >oE*�� '�o. �o( +��� ���S �� ',� �o� �N�o�: '�o�
��E� �� '�-. �%C� �� +��.� '��� �� �N��: , �� �o� ��o��� >o(�C$ +��o$ ���0 ��," Wo.�� �Wo.� ��o �� ���o� #�oR��$�� �� �� '��0p$ :� . ��
��o� �o�5�� �o4N �� _o@ �o( �o��! �� '��� ���� a�N� '�;(:�. ����W.� . �! �o( �'��N �� ���L�� v�oV�N� ���� ��oE� +���o.�5 '��o� �� �o�
�o� �o��! +" �o� s���� _@ ���, ��E� ���� �o4��� ���oC�N� '��o� , ��o��� �.�� ,� �� W��N �$ ��� .���! W�5�� ���o� , Fo;� �!poE� �o( Io�N �o�
W.� � �$ . F�(��L!� �� )��P� �o( :� ��oE� +���.�5 �� �,i& ��� ���(��E� '��
F�4�$ ���$�� ����� I�N �;���! ',� �� ��� F6 J�o��� aI�E� J(� �� ���� Wo.� ���o� ��5��$ ����� aI�N��� . ���o� �� ��o �� ��o� �o� �(�oN" :�
�� #,�X�� I�N ���%C� , ������ , W.� ��x�� qi��� ��o��� aI�N�o�� ��������� ���;� ���(��E� �("��� �$ ���� �����(� qi��� �(�� ��5��$ .
�(� �� �o� a�N� ':�5 F�E�. �( ��� �� ���5��$ ����� � �o� ��o� �o� ��� ���0 �� ����� �� ��� _�V� /(��� �� �o�� . �9,� Jo(� /o.�$
�$���& +��$2 ��;� W& �� I�N ���� �("��� , �(�Io5� �h��o�� >.��� ����� ���(
3 .������ ��� ��L (6�� N�J�� F�E�. �o.� �o� �o� ':�o5 \o��S :� �(�o� \o�& �N�oEN� �o��$, �oN�� B
�� ����� ��.��� , � �$ \��S ����& ��������� :� '���E� �� ����� �N� . �� �o� I�N , ���� �� , W�PDS a�& �� �(� �� #�o&iR� '�o. �o( +��o$
1 Queue Size2 Throughput
F�oE�. J�o�* ���o�N k��V�o.� ��o�0 ��5 :� �� ������ ���� Wo���S �(�o��� +�<N ��0 :� ���0 ����]2 .[ oD�� �� ��,�o=� :� ':�o5 ? , >o@ '�o�
���� ',� �o� �o� ���oLN , ��o� v�o�� � UV<� ���oLN ����� ��o , �o�W.� ��.��� .k����.� F�E�. �� ':�5 F�E�. �(3 ��&�S ',�6 �� �+" '�o�
���o� ':�oX(� '�o;� ,�0 , ��� ':�5 '�;(�,�, W(�w& h���$ �k����.��� ��0��� ��� .
�oE�. ��.��� ���� �!pE� �� \�o� �� ��o� F�o.�$ ':�o5 F)1 ( Wo; ���o� \�o%X$ �� +" #�%V<� �� W.� ��� ��5�� �4N �� ��5��$ �����
�� ���S d=� ����.
\��1- :�5 F�E�. ��� �� �;���! ��(I� +��," W.��'
J(����o$�� +��o� ��o�� �,��o�� 9,� :� ���(��oE� \o�& ��0 ��(� ��� , ��E����(��E� �,� ��.�4 �� #��@ ��o�� . Jo(� �o� #,�oX$ Jo(� �o�
���o� :� ���" W.�� �(� #�&iR� ��.�� ���� �( ��N�O �( �� �,�� �� :,� �� F��o%$ �o��5��$ #�o&iR� Jo(� B�o.� �� , �N�� Wo; '�o��
�� #��@ ����� ��E� �� '��� '�P� a�S J������ ���� . '�o�� F��%$ J(� #��@ J(� �� +��o�& �� ����! �� _@ I(�. ��0p$ ��6�� �� �� �� W.�
�� ���� �':�5 F�E�. '�,�, �N�� . ':�o5 �Wo.���� \�� �� �� ��DN��� B�o.� �o� , �o�5�� ���oS \o�=$ ���o� k����.� F�E�. �� �;(�,�, J(� ��� ':�o5 F�oE�. �o ,�0 +��o�& �o� �;���! ��(I� ���� �6��R k����.� �&��S
�� ��!�$ N��� . '�,�, +��o�P� , ��o� ':�oX(� ��o(� ��o� ��.�=� ��(I� �o� ���� ��E� J(����$�� +��� ���� F�(��L!� ��o� . J(����o$�� F�(��oL!�
����o� '^�o!���$ J�o��� , �o(� �o��5��$ #�&iR� J(� W5�(�� �� ��E��� v�V�N� ����� �� �� �� +��: , ��(I� J(���� �� '�P� a�S J(��;� ���.
3 Inference System4 Routing Table
_@ I(�. ��0�$
;���! ��(I� �)z(
+��� ':�5�;(�,�,
�E�. k����.� F+ J�N��S �&���
+��� ':�X(�
F�(��L!� +��� ���� J(����$��
��E� #�&iR� a�S'�P�
���� '^�!���$

�� ���� �� �C��D$ ���(��E�':�5 F�E�. B�.� �� '�$��-��� '�� �G��!,��� ���5 '��(��0 ���.
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
3.1 .(6�� N�J��
�N��o�� k����.� 9,� :� ��� ��D� ':�5 F�E�. ��1 ��o� �o�5�� ��o;�W.� . #���& ��N���� k����.� 9,� ��and , '�o�� F���o�� B�o.� �o�
\oCO Io��� 9,� ��.�� +��� ':�X(� \�&2 �o� #��o@ ��(no� . F�oE�. +��� �(: #��@ �� �N���� k����.��� ���:
)))(,max(min( ZW�� for all z �>���$ J(� ��� , '�,�, W(�w& h���$ �&���)(ZW� h��$
Woo.� �oo ,�0 W(�oow& . ��Ioo5� a�ooN �oo�� �oo� �oo4N ���oo� ':�oo5 F�ooE�.MATLAB �� ':�. ����� , �6��R.
3.2 .�)�?' K���� w& h���$I(�. '�;(�,�, �� s���� W(� _@ � ,�0 , ���! ��0p$ ,
�N�o� v�oV�N� �o��� W(�w& h��$ �L�� ����! ��(I� . ho���$ J�o� �oD���\�� �� �� ,�0 , �;(�,�, W(�w&)2 (W.� ��� ���,".
\��2- � ,�0 , �;(�,�, W(�w& h���$ J�� �D���
\�� ��)3 (� � ,�0 , �;(�,�, W(�w& h���$ ����$ �(�o�N �o�5� ��� ���� ���� �N�.
1 Mamdani Inference Method 2 Centroid Defuzzifier
)_!�(
)v(
)k(
\��3- )_!� ( _@ I(�. W(�w& h��$)v (��0p$ W(�w& h��$)k ( ��(I� W(�w& h��$ ���!
3.3 .(6�� %'��R �'�� �3 ��o� k��V�o.� ���0 ��5 ��� �� �':�5 F�E�. �� ���X�.� ���� �&��S
W.�]2 .[�,� �� �&��S J(�)1 (��� ���," �oN� . �o;X(�� ��,�o Jo(� ���� �(��N �� ���! ��0p$ +�I�� �;N��. , _@ I(�. ���� . F�oE�. �o ,�0���� �� �� �,� \0�� W.�;���! ��(I� �� ':�5 �N�.
4 .N�)2�Q"� $��SIL
4.1 . !�2� T�U�� ���� +���& �� ���� ,� �;(:�. ���� �� �� �o� �N��N '��]2 [ ,]6 [ ���X�o.�
��� ��� \�o� �� �o� �o��5�� ���oS �(�o�:" ���o� ��oN)4 ( ,)5 ( F�o.�$��� �N�.
3 Rule Base
�,� 1- ���� ��5��$ ����� '��� ':�5 �&��S ��0p$
_@ I(�. ��0�*�� �*�� /.��� ��I� ��0
��I� ��0
�*�� F� ��0 F� ��0 F� F� /.���
�*�� F� ��0 F� F� /.��� /.��� /.��� F� F� /.��� /.��� ��(: ��I� F� /.��� /.��� ��(: ��(: ��0��I� ��(: ��0 ��(: ��0 ��0
��(: ��0��(:
��0��(:
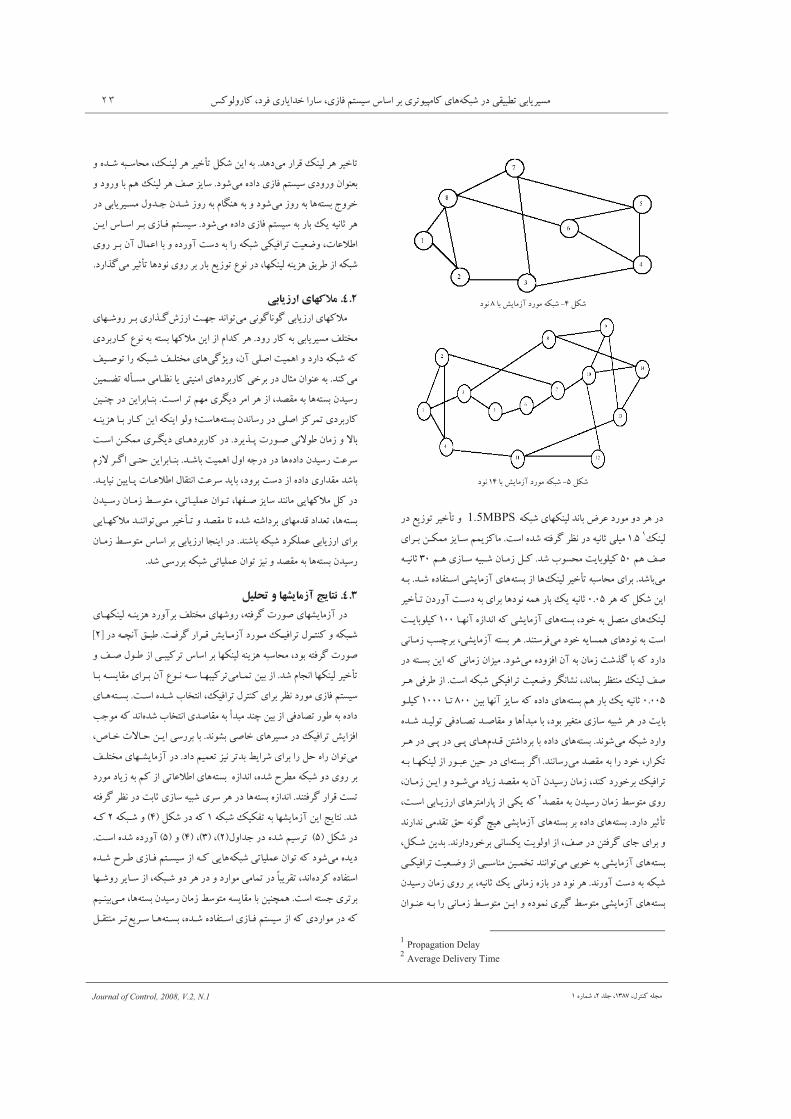
�E����� �� �C��D$ ���(�':�5 F�E�. B�.� �� '�$��-��� '�� �G��!,��� ���5 '��(��0 ���. ��
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
\��4- �� �(��:" ���� ����8 ��N
\��5- �� �(��:" ���� ����14 ��N
���� '�;���! �N�� {�& ���� ,� �� ��1.5MBPS �� h(:�$ ��0p$ ,
���!1 1.5 W.� ��� ��5�� �4N �� ��N�O ��� . �� I(�o. F�(I��� '��o� Jo� F� _@50 �� v�E=� W(����� . Fo� ':�o. ���o� +�o�: \o�30 �o�N�O
�� ���� .���! ��0p$ ��.�=� '��� ��E� :� �� �o� ���X�o.� �<(��:" '�� . �o� �� �� \�� J(�0.05 ��0po$ +��," Wo.� �� '��� ����N ��� ��� �( ��N�O
!��� ��E� ���0 �� \%�� '�� �o;N" �:��N� �� �<(��:" '��100 Wo(������� ��0 �(�E�� '����N �� W.� ���.�5 . �N�o�: >E*�� ��<(��:" ��E� ��
�� ��,I5� +" �� +��: W�n� �� �� ���� ��� . �� ��oE� J(� �� �N��: +�I��W.� ���� ���5��$ W�P|, �LN�<N ��N��� �4��� ���! _@ .R :� �o� �5�
0.005 ��E� F� ��� �( ��N�O J�� �;N" I(�. �� ���� '��800 �o$1000 �o�� ��o� �o�!�$ �5��o%$ �o@�C� , ������ �� ���� ��x�� ':�. ���� �� �� W(��
�� ���� ���, �N�� .��E� a�oS J������ �� ���� '�� �o� �� �o� �� �o� '�o��� �%C� �� �� ��0 �����$ ��N�.� .��E� ��� '� �o� �o;���! :� ��o�& J�6 ��
�� ��(: �%C� �� +" +��.� +��: ���� ���0�� ��5��$ �+�o�: Jo(� , ��o��%C� �� +��.� +��: /.��� ',�2 �Wo.� ���o(:�� '��������� :� ��( ��
���� ��Op$ .��E� ��E� �� ���� '�� �N���N ���C$ ?6 �N�� ~�� �<(��:" '���!,� :� �_@ �� J�5�� '� '��� ,�N�����0�� �N�E�( W( . �\�o� J(��
��E� �� ���0 �� �<(��:" '�� �o��5��$ W�Po|, :� ��o.��� J�o�V$ ��N��$�N�," W.� �� ���� . +��.� +��: ',� �� ���N�O �( �N��: �:�� �� ��N ��
��E� +��o�& �o� �� �N�o�: /o.��� Jo(� , ����N '��� /.��� �<(��:" '��
1 Propagation Delay 2 Average Delivery Time
�� ���S ���! �� ��0�$ ��� . , ��o� ��o.�=� ��o��! �� ��0p$ \�� J(� ���� ���� ':�5 F�E�. '�,�, +���P� ��� . , �,�, �� F� ���! �� _@ I(�.
��E� k,�0 �� :,� �� �� �� ���(��oE� �,�o +�o� :,� �� a�L�� �� , ����� ���� ':�5 F�E�. �� ��� �( ��N�O �� ��� . Jo(� B�o.� �o� ':�o5 F�oE�.
5��$ W�P|, �#�&iR� ',� �o� +" ���&� �� , ���," W.� �� �� ���� ����� ��Op$ ����N ',� �� ��� h(:�$ j�N �� ��;���! ��(I� ?(�R :� ���� ���n�.
4.2 .���)62� (��V� �� �N���N�� ���(:�� '�;�i� 9:�� Wo; �N��$ '�;o�,� �o� '��no�
�,� ��� �� ���(��E� _�V� . �� ��E� �;�i� J(� :� a��� �� '�����o� j�N��`(, �+" �@� W���� , ���� ���� �� _�o@�$ �� ���o� _o�V� '��
�� ��� . J��ow$ �!poE� ���o4N �( ������ '�������� �0�� �� ���� +���& ����E� +��.� Wo.� �$ F;� '�L(� ��� �� :� ��%C� �� �� . J�o�* �� J(����o��
��E� +�N�.� �� �@� I���$ '������ ��(� �!, �W.�� �o�(I� �o� ��o� J(� � ��(no� #��o@ �N)�R +��: , )�� . Wo.� Jo��� '�oL(� '�o������� ��
���� +��.� W&�. �o��� W���� �,� � �� �� �� . a:) �o�� �o�6 J(����o�� �o(��N J�(�o� #�o&iR� ��C�N� W&�. �(�� ��,�� W.� :� ���� '���C� ���� .
��$�o��& +��o$ ��;Xo@ I(�. ��N�� �(�;�i� \� �� +��o.� +�o�: /o.�����E� �o� ��0po$ , �%C� �$ ��� ������� '�;��S ���P$ ��� �(�o;�i� �o�N��$
����� ���� ����& ���(:�� '��� . +�o�: /o.��� B�.� �� ���(:�� ��(� ����E� +��.� �� �.��� ���� �$���& +��$ I�N , �%C� �� ��.
4.3 .W��D� - ��C)��6# X)��< #��@ '�;<(��:" �� '�o;���! �o�(I� ��,"�� _�V� '�;�,� ���5��
Woo5�� ���ooS �(�oo�:" ���oo� �oo�5��$ ��oo��� , ���oo� . �� �oogN" ?oo�R]2 [ , _o@ ��oR :� �o����$ B�.� �� �;���! ��(I� ��.�=� ���� ��5�� #��@
�� a�N� �;���! ��0p$ . ���o�$ J�� :� �o� �oE(�C� '��o� +" j�oN �o. �o;����$��� �4N ���� ':�5 F�E�. Wo.� ��o� v�V�N� ���5��$ ����� ' . ��oE� '�o�
��� v�V�N� '�@�C� �� ���� ��* J�� :� �5��%$ ��R �� ���� > �� �� �N��N�<� �@�0 '����E� �� ��5��$ �(�I5� . �z�o0 #)�o6 Jo(� �.��� ��
�� ��� F��P$ I�N �$�� /(��� '��� �� \6 ��� +��$ . _o�V� '�;o<(��:" ���D� ���� ,� ',� ����E� �:��N� ���� � ���� ��(: �� F� :� �$�&iR� '��
���5�� ���S WE$ .��E� �:��N� ��5�� �4N �� W��O ':�. ���� '�. �� �� ���� . ���� ���X$ �� �;<(��:" J(� b(��N1 \�� �� ��)4 ( ���o� ,2 �o�
\�� ��)5 (�,�� �� ��� F�.�$)2( �)3( �)4 ( ,)5 ( Wo.� ��� ���," .��(� �� ���� �$���& +��$ �� ��� ��o� ��oR ':�o5 F�oE�. :� �o� �(��
���� ���X�.� ����o� ,� �� �� , ����� ����$ �� q��(�C$ ��N� �;o�,� �(�o. :�W.� ��E '�$�� .��E� +��.� +��: /.��� �E(�C� �� J��g�� �o� ��� F�o���
���o� ���X�o.� ':�o5 F�E�. :� �� '����� �� �� ��oE� h(�o. �o� \oC��� �o$

�� ���� �� �C��D$ ���(��E�':�5 F�E�. B�.� �� '�$��-��� '�� �G��!,��� ���5 '��(��0 ���.
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
��� Wo.� �o��� �;�,� ��C� :� ��(��:" ���� ,� �� �� �I�N +��: J(� , �N��� �� ���� h(�. ��C�N� , ��� h(:�$ �� ':�5 F�E�. W���S ��� J(� �� �N�.�.
�,� 2 – ���� �� _�V� '�;�,� '��� ���" W.� �� �$���& +��$1
��E� I(�. ��)W(��( �� _@ �$���& +��$�$�(�;(%)
�$���& +��$0.8_@+0.2��0p$(%)
�$���& +��$0.5_@+0.5��0p$(%) ':�5 �$���& +��$(%)
800 59.16 83.91 96.34 94.22 900 51.78 76.63 82.64 90.21
1000 47.91 71.66 76.54 82.21 �,� 3– ���� �� _�V� '�;�,� '��� ���" W.� �� �$���& +��$2
��E� I(�. ��)�W(�( �� _@ �$���& +��$�(�;�$(%)
�$���& +��$0.8_@+0.2��0p$(%)
�$���& +��$0.5_@+0.5��0p$(%) ':�5 �$���& +��$(%)
900 55.56 81.82 95.55 95.16 950 56.46 82.93 91.79
1000 53.33 77.68 87.97 88.21 �,� 4– � �� _�V� '�;�,� '��� �%C� �� +��.� +��: /.��� ���1
��E� I(�. ��)W(��( +��.� +��: /.����(�;�$ �� _@)��N�O(
+��.� +��: /.���0.8_@+0.2��0p$)��N�O(
+��.� +��: /.���0.5_@+0.5��0p$)��N�O(
+��.� +��: /.��� ':�5)��N�O(
800 1.67 1.32 0.91 0.76 900 1.58 1.26 1.14 0.86
1000 1.75 1.47 1.33 1.03
�,� 5– ���� �� _�V� '�;�,� '��� �%C� �� +��.� +��: /.���2
��E� I(�. ��)W(��( +��.� +��: /.����(�;�$ �� _@)��N�O(
+��.� +��: /.���0.8_@+0.2��0p$)��N�O(
+��.� +��: /.���0.5_@+0.5��0p$)��N�O(
+��.� +��: /.���':�5)��N�O(
900 2.01 1.34 0.83 0.78 950 1.92 1.02 0.79
1000 1.97 1.37 1.09 0.81
5 .(��� � ��< ���� �� ���(��E� �!�C� J(� �� �( :� ���X�.� ��� �� '�$��-��� '��
W5�� ���S �.��� ���� ':�5 F�E�. . /(��o��� �o4N ���o� ':�o5 F�oE�.���� _�V� +��o$ ��;o�,� �(�o. �o� �oE(�C� �� ���o� _o�V� ��D. , '�
.�, �$)�� �$���&��� +�<N ���� h���� :� '�$ ���;� ���X� . ��o� }Do. ���x$ ����(I� ����� �� �o��x$ �o(�� ��o �� �o�5��$ B�o.��� �o;���! �� s���� '��
':�o5 F�oE�. �� Jo(� , ��o� ��o(� ���� �("��� �� '�$)�� ��;� �$ ���� �o� ��o����$ '�;o�,� �(�o. �o� �E(�C� �� �� �� a�N� ��� �� ���� ��R
x$��� \@�6 ���N J(��;� ����� '^�!���$ I�N , ��� }D. ��� . '����� ��
h��o�� �o$ ��o�� #��@ �$���4�$ ��� ��R ':�5 F�E�. ',� �� �(�� '�P��N�� ��%� ���;� ���� :� '��<�� . �(��L�� W&�. ',� �� �(�� J��g��
��� ���� +" +��: �$ ��� ��� ':�. ����.
KL���
[1] L. Peshkin & V. Savova, "Reinforcement Learning for Adaptive Routing", In Proc. of the International. Joint Conf. on Neural Networks, IJCNN, 2002.

�E����� �� �C��D$ ���(�':�5 F�E�. B�.� �� '�$��-��� '�� �G��!,��� ���5 '��(��0 ���. ��
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
[2] A. Pasupuleti, A. V. Mathew, N. Shenoy and S. A. Dianat, "A Fuzzy System for Adaptive Network Routing", Proceedings of SPIE Vol. #4740, SPIE's 16th Annual International Symposium on Aerospace/Defense Sensing, Simulation, and Controls, Orlando, Florida USA. 1-5 April 2002
[3] J. Boyan and M. L. Littman, "Packet Routing in Dynamically Changing Networks: A Reinforcement Approach", Advances in Neural Information Processing Systems, volume 7, pages 671-378, 1994.
[4] Bruce S. Davie, Larry L. Peterson, “Computer Networks: A Systems Approach” Morgan Kaufmann,second edition, June 2000.
[5] D. W. Glazer and C. Tropper, "A New Metric for Dynamic Routing Algorithm", IEEE Transactions on Communications, Vol. 38, No. 3, March 1990.
[6] M. Kara, H. Karabelli & N. Duru, "Fuzzy Based Routing In Packet Switching Networks", International XII, Turkish Symposium on Artificial Intelligence and Neural Networks – TAINN 2003.
[7] Chiang Kang Tan, "The Use of Fuzzy Metric in QoS Based OSPF Network",
http://www.ee.ucl.ac.uk/~lsacks/tcomsmsc/projects/pastproj/ck_tan.pdf, 2000/2001.

��� �� � 1387 � �2 ����� �1�=X@ �39-26
Journal of Control, 2008, � Iranian Society of Instrument & Control Engineers http://www.isice.ir ������ ��1387S� ��I�� , ����� +�.��;� J�N� ��+��(� ?
(6�J"%� !��I)! (!�� Y��2�� �M1��Z ��� - O��� �� ,#�Q"��
��!�&� [��� ��%��
���:�!�0 ���61 ��N�O '���� ��PE� 2
���<N���,�� �� ����� ��L<N�.�R J(�!���%N � ��0 ��P�@1 ����� �.������ ��L<N�� ������;<� �.,��52 [email protected] 2 �[email protected]
________________________________________________________________�%��+: ����� �!�C� J(� ��!��':�E '��� J����$� �(�C!� ��$��N^� �!�C�N� W5�� ������� +��$ ���$��.� +:�0 ,!��':�E ��C�N� /0
J���� � ,�0 ����� '��� a�N� �D0��K #��%� �� �D0��K W!�6 '�w5 #)��P� j��� �� �� W.� ���13 �� W!�6 ��x����� �� \��<$.��(��5 I(�N �� , , �;�!�6 +���N B��.� �� �� � �$ �� '�� ���,��N �@� �!�� ���(� �� � �$ �� I�N , \��& �'���
" �5��%$ �X!�� ��� ����� \��<$ '�� �X!�� :� ��( , ���� ��� �5��%$ ��� �� �4�� >.��� �5��%$ ����� '���$ :� ���X�.� �W.� + ���4�� J��� �� �.����V$ �( �J���� � ,�0 ����� '����L !���� �( , �5��%$ M��;�L '��� ��(I� h��$ �� � �$ �� �5��%$ M��;� �
+" ����& , ��� �� �6��R '��� ��$��N^����$ F�E�. I�N , � ,�0 ����5 �L!���� �� ������ �� ����� W!�6 ����5 �L! ���5��5�( F��P$ J�!��W!�6 �L���V$ +���P� �(�C���� �� �E.���V$ �� �E(�C� �� �5��%$ ���;� ����� �� ��E� �C6 F�E�. �.���L J�!��
W.� �5��%$ M��;� �!���� ')�� �]���� J��� �� ����� ��� #�N�.�N ����� �� ���D� �(���� >DS ���(� ��.
'��� '�� �^�,: ����� ���5�( F��P$ J�!�� ���5 ������� +��$ ����� +��� �'��� ��$��N^ ����$ �� ,�0 , W!�6 ����5 �L!�����5��%$ M��;�
Abstract: This paper presents nonlinear modeling, simulation, and controller design for wind energy conversion system in Dizbad power plant. The wind power plant scheme consists of a three-phase induction generator that connected to the wind turbine via a fixed ratio gearbox. A static VAR compensator was connected at the generator terminals to regulate its voltage. The induction generator was connected to the utility through a double transmission line. The mechanical power input and terminal voltage output was controlled using blade pitch angle and firing angle of thyristor. An optimal stochastic control is designed for the system based on the optimal stochastic estimator. The performance of the proposed scheme is compared with both output feedback and state feedback controllers with extended Kalman filter. These controllers are applied to the nonlinear system and their performances are recognized under gust and different type of disturbances. The responses of the proposed optimal stochastic controller exhibited a good damping and fast recovery under these disturbances.
Keywords: State and Output Feedback Controllers, Wind Turbo Generator, VAR Compensator, Extended Kalman Filter, Stochastic Optimal Control.
________________________________________________________________
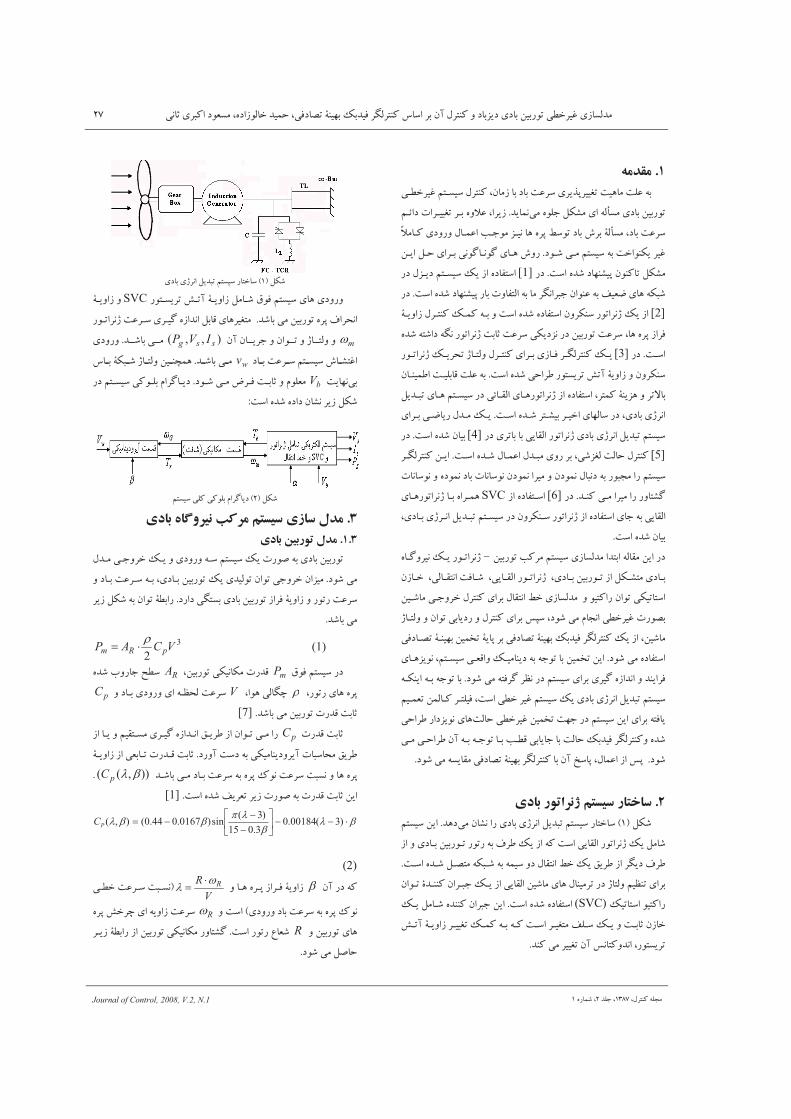
':�E!�� ���I(� '��� J����$ �D0��K ����� , B�.� �� +"�L!���� �5��%$ M��;� ����5 ����:�!�0 ���6� �N�O '���� ��PE� 27
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
1 .��%9� �oD0��K F�oE�. ����� �+��: �� ��� W&�. '�(n����x$ W���� W& ��
\�<� '� �!pE� '��� J����$�� �� �(��N . Fo]�� #��o��x$ �o� �,i& ���(: Io�N �� ��� /.�$ ��� 9�� M!pE� ���� W&�. ��o�&� >o �� qi��o� '�,�,
�o� F�E�. �� W0����( ��K �o�� . Jo(� \o6 '��o� �N���oN�� '�o� 9,�W.� ��� ��;�<�� +����$ \�<� . ��[1] �� �Io(� F�oE�. �( :� ���X�.���� +���& �� _�P| '�� ����W.� ��� ��;�<�� ��� #,�X�!� �� �� �LN . ��
[2] Mo(,�: ��o��� �o�� �o� , W.� ��� ���X�.� +,���. ��$��N^ �( :�:��5 �� ��� ��� ����� �LN ��$��N^ W��O W&�. ��(�IN �� J����$ W&�. �
Woo.� . ��[3] ��oo$��N^ �oo(�=$ ^�oo�!, ��oo��� '��oo� ':�oo5 �ooL!���� �oo(���E(�$ �$" M(,�: , +,���. W.� ��� �6��R . +�o���R� Wo���S W& ��
\(�o�$ '�o� F�oE�. �� �]�oC!� '�o���$��N^ :� ���X�.� ����� M�(I� , �$)�� Wo.� ��o� ��o<�� �o�0� '�;!�. �� �'��� '^�N� . '��o� �o|�(� ��o� �o(
�� '�$�� �� �(�C!� ��$��N^ '��� '^�N� \(��$ F�E�.[4] W.� ��� +��� . ��[5] Ix! W!�6 ����� Wo.� ��o� ��o�&� ��o�� ',� �� ��� . �oL!���� Jo(�
#�N�.�N , ����N ��� #�N�.�N +���N ���� , +���N ���N� �� ���� �� F�E�. �o�� �o� ���� �� �,��<� . ��[6] :� ���X�o.�SVC '�o���$��N^ �o� ���o��
�'��o� '^�oN� \(�o�$ F�oE�. �� +,���o. ��$��N^ :� ���X�.� '� �� �(�C!�� ��� +���W. .
J����$ >��� F�E�. ':�E!�� ����� �!�C� J(� ��– ��o�,��N �o( ��o$��N^ :� \�oo<�� '��oo�'��oo� J����oo$� �(�ooC!� ��oo$��N^� �!�ooC�N� W5�oo�� +:�oo0
������ +��$ ���$��.� , !��':�E J�o��� �o ,�0 ����� '��� ��C�N� /0 ��� �� a�N� �D0��K #��%�G-. � +��$ ���(�� , ����� '��� ^�o�!, ,
�5��o%$ Mo��;� J��V$ M(�� �� �5��%$ M��;� ����5 �L!���� �( :� �J������� �� ���X�.� . '�o�I(�N �F�oE�. �oPS�, �o����(� �� � �$ �� J��V$ J(�
��� �� ��5�� �4N �� F�E�. '��� '��� �:��N� , ��(��5 . �o��(� �o� � �$ ���W.� �D0 ��K F�E�. �( '��� '^�N� \(��$ F�E�. F�o�P$ J�!�o� �o��5W!�6 �D0��K J��V$ W; �� F�E�. J(� '��� ��5�( �6��R ���I(�N '��
�o� �o6��R +" �o� �o �$ �o� >oDS ���(� �� W!�6 ����5 �L!����, ������ .��� �� �E(�C� �5��%$ M��;� �L!���� �� +" �.�� ����&� :� G�.
2 .(!�� 2����<\ N�J�� 2��1��
\��)1 (�E�. ���0�.�� +�<N �� '��� '^�N� \(��$ F ��� . F�E�. J(� :� , '��o� J����o$ ��$� �� ��R �( :� �� W.� �(�C!� ��$��N^ �( \��� Wo.� ��o� \o%�� ���o� �� ���. ,� ��C�N� /0 �( ?(�R :� �L(� ��R .
+��o$ ��o��� +��o� �o( :� �(�C!� J���� '�� ������$ �� ^��!, F�4�$ '��� ��$��.� ������(SVC) W.� ��� ���X�.� . �o( \��o� ����� +��� J(�
�o$" Mo(,�: �o��x$ �o�� �o� �o� Wo.� �o�x�� _o. �o( , Wo��O +:�0���E(�$� ��� �� ���x$ +" GN���,�N� .
\��)1 ('��� '^�N� \(��$ F�E�. ���0�.
���oE(�$ �o$" Mo(,�: \��o� l�5 F�E�. '�� '�,�,SVC Mo(,�: ,� �� J����$ ��� ���=N����. \��S '����x�� '�o�� �:��N� ��o$��N^ W&�o.
m+ +" +�oo(� , +��oo$ , ^�oo�!, ,),,( ssg IVP �oo��� �oo� . '�,�, ��oo� W&�oo. F�ooE�. 9�oo<�K�wv �oo��� �oo� . B�oo� M��oo� ^�oo�!, J�oo�g��
�� W(�;NbV {�o5 Wo��O , a�P� ��o� �o� . �� F�oE�. ���o� a����o(�W.� ��� ���� +�<N �(: \�� :
\��)2 (��� a����(�� F�E�. ��
3 .N�J�� (6�� �%� (!�� ���-��< ]�� 1.3. %�� Y��2�� � (!�
��o� �o ,�0 �o( , '�,�, �o. F�E�. �( #��@ �� '��� J����$��� �� . &�o. �o� �'��o� J����$ �( '��!�$ +��$ � ,�0 +�I�� , ��o� W
���� �L�E� '��� J����$ :��5 M(,�: , ��$� W&�.. D���M �� +��$\�� �(: ������ .
3
2VCAP pRm
',
(1)
l�5 F�E�. ��mP �J����$ ���N��� #��SRA ��� v,�� }D. ���$� '�� ���' ���� �!�L*V W&�. '�,�, '� �o4=! , ��o�pC
���� �� J����$ #��S W��O .[7] #��S W��OpC o$ �o� �� :� �o( , F�C�oE� '�o�� �:��oN� ?o(�R :� +��
��," W.� �� ������(�,�(" #��.�=� ?(�R . o(,�: :� �P��o$ #��oS W��OM �o��� �o� ��o� W&�. �� ��� r�N W&�. W�EN , �� ���)),(( -.pC .
_(�P$ �(: #��@ �� #��S W��O J(�W.� ��� .[1]
-.-
./--. ,����
���
���
� )3(00184.03.015
)3(sin)0167.044.0(),(PC
(2) ��" �� +- (,�: :��o5 M �o� ��o� ,
VR R+
.,
) �oD0 W&�o. W�oEN'�,�, ��� W&�. �� ��� r�N ( , W.�R+ ��� �0�* '� �(,�: W&�.
, J����$ '��R W.� ��$� j�P� . �o(: MD��� :� J����$ ���N��� �,��<�� �� \@�6�� .

28 ':�E!�� ���I(� '��� J����$ �D0��K ����� , B�.� �� +"�L!���� �5��%$ M��;� ����5 ����:�!�0 ���6� '���� ��PE��N�O
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
.'+
/21 2VARCPT p
R
mm (3)
o(,�: ���o� W&�o. \��& �. �� '��� J����$ ���N��� #��S ���� �� ��(�M W&�. , �� ��� ���� s��$�� ��$� '� �(,�: . +��$ >(�| #����x$ �(: \��
W.� ���� +�<N��.
\��)3 ( �� W�EN +��$ >(�| #����x$)(. _�V� :��5 '�(�,: '���
2.3. �)�9"� 2����<\ �%� '�o���=� '��o.�� �� +,���o. ho �� ��L�.� �� �]�C!� ��$��N^ ���
qd, �� ��N�� ��5�� �4N �� \C�E� ��x�� +���& �� ��<N '����� �� ��S, W.� �(: #��@[8] .� J(� �� �� �,"��( ��E(���� � '��� �(��N \� ,
�o4N �� Wo!�6 �o�x�� +��o�& �o� �� �� +�(� �� ��!�6 �� W�EN ':�. ���� �$ >.��� �F(��L�W.� .
)( qsdssdsbds iRV 0+0 ��� (4)
)( dsqssqsbqs iRV 0+0 ��� (5)
qrmbdrrdrbdr iRV 0+++0 )()( ���� (6)
drmbqrrqrbqr iRV 0+++0 )()( ���� (7)
W.� �(: #��@ �� ����� �� �� +�(� MD��� #)��P� J(� �� .
qrMqsssqs iXiX �0 (8)
drMdsssds iXiX �0 (9)
qrrrqsMqr iXiX �0 (10)
drrrdsMdr iXiX �0 (11)
(� ���P� �(��C� +��� ���S �� �(: W!�6 '�w5 F�E�. ����� '� �� �� +���� �� ��!�$ .
����
�
�
����
�
�
���������
�
�
���������
�
�
���
��
��
�
�
����
�
�
����
�
�
����
�
�
����
�
�
dr
qr
ds
qs
ssr
b
rMr
b
rssrMr
Msees
Msrrs
b
dr
qr
ds
qs
b
dr
qr
ds
qs
DXR
DXR
DXR
DXR
DXR
DXR
DXR
DXR
VVVV
0000
+++
+++++
0000
0
0
01
01
����
(12) ��$��o.� W�o. �� ��$� '����x�� ����$ �#)��P� J(� �� \oC��� �oN� ��o� .
#��@ �� ��$� �E�R��x� ,���!� �,��<�1pu �o� ��o��N �(: #��@ �����.
qrdrdrdre iiT 00 � (13)
3.3. �"�9�<� ���� �%� ��Ioo� '�;��ooES �oo����(� :� ':�oo. ���oo. '��oo� G���oo�� ��oo� ��
���N�o�� '�o� W�oES �o� �oE(�C� �� '� �46i� \��S ��R �� �� ���N������ �� �4�5�@ ����E� ��E�" . �o.��(� �o� '�;��o��� �� q�o@�%0 ��� J(�
�;N��: �� , )������ �� l��@ �WE�N �� �� a:) '��������� �� �( . Go� a�o& J�5�o� �o4N �� , �oK��� �o����(� :� +��� �4�5�@ �� W!�6 J(� ��
��o� '� �o(,�: W&�. �W5�� �� ��DPN�m+ �oK��� '� �o(,�: W&�o. , ��$�H+ G����� W&�. F� ��R '� �(,�: W&�. ,G+ ��oR �o� �
��� �� ��5�� �4N �� ����� . ��o$��N^ ��o$� ���N�o�� W&�. F�E�. J(� ��m+ +" �� �o� ��o� �o� _(�P$ �(: #��@ ��GR G���o�� >(�o|
W.� .
GGm R ++ (14)
D��� J�5�� �4N �� �� #��o@ �o� ���N�o�� , ��(���!� M(,�: W&�. J�� M
mrp ++2
�� ����0 �(: #��@ �� W��6 �����(� M!��P� :
)(2 em
A
bm TT
H�
++� (15)
+" �� ��AH �(�oC!� ��$��N^ , '��� J����$ �.��(� j��� �N��: W��OW.� .
4.3. �� ,6�1 �%�����2 ,��� ������ ��o� ��o��� �o����� +��$ ����� +��� W��O +:�0 �( :� �!�C� J(� �� ���X�o.� ��o$��N^ '�o� �oN�(�� �� ^��!, J���� �LN W��O '��� ���E(�$ /.�$
��� �� . Mo(,�: �o��x$ �o�� �o� ������ +��$ ��.��� F�4�$ ��� �� ��� J(���� �� \@�6 ���E(�$ �$" . +:�0 '��� +�o(� , ^�o�!, J�� MD��� �W��O
'����=� '��.�� �� W!�6 '�w5 #)��P� #��@ ��qd, ��\�� �(:W.�:
1 Per unit

':�E!�� ���I(� '��� J����$ �D0��K ����� , B�.� �� +"�L!���� �5��%$ M��;� ����5 ����:�!�0 ���6� �N�O '���� ��PE� 29
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
��
���
���
�
���
���
���
� ��
�
���
�
dc
qccb
ds
qs
b
b
ds
qs
ii
XVV
VV
++
+0
0��
(16)
M(,�: �� \��� W(��� ����E(�$ '���90 ��� �� �� � �� . Mo(,�: �(�I5� �o����� +�o(� , �o����� +��$ ���� d&�� �$" ��o� �o� . :� ���X�o.� �o�
��� �� ��.�=� �(: #��@ �� �(�C!� +�(� �@��& �(��5 \�=$.
eq
ss
LL X
VVX
i ���
/
%/%/ )](2sin[)(2 (17)
+" �� �oo�eqX , ���ooE(�$ ���ooP� GN�oo����% Woo.� �oo$" Moo(,�: . '�o���=� '��o.�� �� \�EN��X(� #)��P�qd, �o� \�o� Wo!�6 '�ow5
'���Li ��� �� ����N �(: #��@ �� +,���. h �� ��L�.� �� :
��
���
���
�
���
���
���
� ��
�
���
�
ds
qs
Leq
b
dL
qL
b
b
dL
qL
VV
Xii
ii +
++0
0��
(18)
5.3. ��9�<� 01 �%� '�o���=� '��o.�� �� ��oC�N� /o0 #)��P�qd, ho �� ��L�o.� ��
�� +,���.\�� '�w5��� �� ����N �(: #��@ �� �W!�6 :
��
���
���
�
���
���
�
���
�
����
�
�
����
�
�
�
���
�
���
�
db
qb
TL
b
ds
qs
TL
b
dTL
qTL
TL
TLbb
bTL
TLb
dTL
qTL
VV
XVV
Xii
XR
XR
ii ++
++
++
��
(19) 4 . �+� ��Q�� ^%� �M1 �%�
'��o� '^�oN� \(�o�$ F�oE�. �( �� �� �� '�� F�E�. �(: �� � �$ �� ) �o. ,� ��oC�N� /0 ��]�C!� ��$��N^ �'��� J����$ ��$� W�oEN G���o�� ���
������ +��$ ����� +��� , W��O(SVC) ( '�w5 \�� +��$ �� W(�;N ����," W.� �� �� �(�;N F�E�. W!�6 . ��o� �oDCN ��o6 W!�6 #)��P� ���
�(" �� �� �(: #��@ �� �*�� ���L�. ��� ��N�� �D0:
BuAXX �� +" �� ��uX , W.� �(: ��� ��:[7]
w
t
tqTLdTLqldlqsdsrqrdrqsds
Vdu
iiiiVVX
���
�����������
],[
],,,,,,,,,,[
%-
+0000
�N� ��� �5�P� ����| �� W!�6 '����x�� . MoDCN ��6 �L�� #����x$ J(� '����=� �� +,���. h �� ��L�.� �� , ���qd , ���E� . '�� G(�$��
BA, I�NW.� ���" ����| ��. Wo!�6 '�ow5 �oD0 ��o� M(�� �� ��!�C� J(� �� �L!���� �6��R 9,�
Woo.� . �ooD0 �oo�K ��oo���oo�,��N F�ooE�. #)��ooP� \��oo� '��oo�(12)
(19),(18) (16),(15),W.� ��� �D0 ��� �DCN ��6 �� . �oD0 ��o� ��\�� W.� �(: :
dBuAXX ���� (20)
+" �� ��duX ,, W.� �(: ��� �� .
w
t
tqTLdTLqldlqsdsrqrdrqsds
Vdu
iiiiVVX
���
�����������
],[
],,,,,,,,,,[
%-
+0000
':�o. �D0 �N,� �� �� W.� ��m �� a:)� Wo!�6 '�o���x�� ��o� s�oCN�
�N�� J�P� ��E(�� ��� , '�,�, . ��o � ��� ��* :� G�' �oDCN ����o� �o��N�� ���(�� ���1140 �X \���11 9�o<�K� �o( , '�,�, ,� , Wo!�6 ��x�� #��@ ��W.� ��� ��5�� �4N �� �(:.
0Xt
wqTLdTL
qldlqsdsrqrdrqsds
Vii
iiVV
],,,,
,,,,,,,,,[
00000
000000000
%-
+0000
'��& �����0X W.� �(: #��@ ��. 0X
t]5.12,66.1,6,61.0,35.0,02.0,17.0,80.0,09.0,58.323,233.0,74.0,10.0,80.0[
��
5 .�"�4 ��%�� �Q"�� �4��_
�o��� �o� J�o��� +��$ , �N�(�� ^��!, \��� q�$��& '��� J����$ � ,�0 .���� �� , '��� J����$ ����� '��� ��� ,� . �o����� +��o$ ����� ���� J�!,�
W.� �(�C!� J���� '�� �N�(�� �� ^��!, F�4�$ '��� . 9,� J(� �� ����� ��I�� _. ���E(�$ �$" M(,�:SVC W.� . '�,�, �,��<� ����� ���� J��,� Woo.� '��oo� ��oo$��N^ �oo� . : �oo��x$ 9,� Joo(� �� ��oo��� ��Ioo�� :��oo5 Moo(,�
W.� '��� J����$ '�� ��� . F�E�. ',� �� ���N��� '����<5 ���� '��� �,�o=� �o6 �( �'��� J����$ �g��sdeg/10* �o��x$ �oL�& '��o�
F(��� �� �4N �� J����$ M(,�: ����� . #���4�$ , ��(���!� +��$ #���4�$ �L!���� ?(�R :� ^��!, I��� �� \@�6 . �o6��R Mo(�� �o� �o��L!���� Jo(�
Wooo.� �oooD0 ��ooo� . '�oooD0 '�ooo� ���L�ooo. ',� �ooo� �ooo�� ���oooL�N� ,�)( gref PP � ,)( sref VV � ��� �� ���&� . ��o� �o� ���L�o. ,� J(�
��� �$ ��N�� �� >���$ ��S W!�6 '�w5 ��� �D0��,I5� \o@�6 �o(:���.
Eduzz �1�2� (21)
��� �� _(�P$ �(: #��@ �� ��������� +" �� �� .

30 ':�E!�� ���I(� '��� J����$ �D0��K ����� , B�.� �� +"�L!���� �5��%$ M��;� ����5 ����:�!�0 ���6� '���� ��PE��N�O
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
� � � �
��
���
��
�
���
�1�
�
���
��
2
���
��� ������
��
���
�
��
��
�
��
�
��
3 3
0,
0,
00
,
,
111113
211113
112
11111313
12
111113
�
4
4
EB
DA
dtVVdtPP
Xz
tsrefgref
��� �� � �$ ����,I5� '�o� 9,� �o�� �o� Wo!�6 ���o�5 �L!���� �)����� �� \@�6 �(: \�� �� >DS ���(� �6��R .
zKu s� (22)
G(�$�o� ��oE� �oC6 '�o� >oDS v�V�N� ��sK ��o� �o� \o@�6 . ����o� � ,�0y ��� �� ����N �(: #��@ ��.
11313616 ��� zCy (23)
����� +" �� ��y MD��� #��@ ��(24) ��� �� _(�P$.
tsref
grefrssg
dtVV
dtPPIVPy
3
3���
�������
])(
,)(,,,[ + (24)
�(: \�� ��� a����(�� ��� �� +�<N �� W!�6 ����5 �L!���� .[2]
\��)4 (W!�6 ����5 �L!����
�,�o �� ��o� UV<� '�� +��� �� ��E� �C6 '�� >DS v�V�N� ��)1 (
G(�$��sK �� \@�6 �(: #��@ �� ���:
��
����
��
016.0013.0804.084.4479.1073.0438.067.2821.067.7102.3254.4706.19529.106
sK
��
��
���������
1.14411.37648.004.0616.0688.05.76782.274682.9921.39.639008.22
�oN�� �o� ��E� �C6 v�D� '�� >DS �o� �o.�� �o� �oN� ��o� v�oV�N� '�
���� ����� �� a:) �(�����.
�,� )1 (�C6 F�E�. '�� >DS �C6 F�E�. , :�� ��E�W!�6 ����5 ��
�`(, �(��C� F�E�. �C6W!�6 ����5 �� ��E�
�`(, �(��C� F�E�.:�� �C6
4.28884.23 j�� 4.28884.23 j��
4.28884.23 j�� 4.28884.23 j��
4.213428.27 j�� 4.213428.27 j��
4.213428.27 j�� 4.213428.27 j��
08.37504.22 j�� 08.37504.22 j��
08.37504.22 j�� 08.37504.22 j��
37730 j�� 37734.0 j��
37730 j�� 37734.0 j��
59.914.37 j�� 59.914.37 j��
59.914.37 j�� 59.914.37 j��
40� 42.0�
5.5� 0
8.0� 0
6 .����) N��`� Y�"� ����� �4��_�PDS ���;� ����� '���$2 '�o� Wo!�6 �o0�� �� �o;�$ �o� Wo!�6 ��
�:��N� \��S �� W!�6 ����$ �� I(�N :� '��& '��& ��� � \��S ����E� '������� �� . �o( ���;� ����� '��� W!�6 J��V$ J(� :� �5��%$ ����� 9,�
��� �� ���X�.� �5��%$ F�E�. . �� �o��(� �o� �,io& �� � ,�0 ���(� �� � �$ �� '��� J����$ F�E�. ��
��o��� �o� Io�N I(�oN �� ���!" ������ ��N B��.� . J�!�o� �o��5 :� ���X�o.�W.� '�,�|.
'�� F�E�. '��� J��V$ �!pE� ����� ��� �( �� W!�6 �� �D0��KW.� .F�E�. '��� '� ��.�=� F�(��L!� �( �� �����.� '��� ��D0��K '��
�o�5�( F�o�P$ J�!�� ���5 �� W(�;N �� �� W.� ��� ���&� �� >(�C$ �0�� ��� �� ��� .W.� �(: #��@ �� '��� �:��N� ��� , F�E�. ���:
)R,0(Nv),Q,0(Nw),p,z(N)0(zv)t,z(hy
w)t(G)t,u,z(fz
00 555���
(25)
�� +" ��z �o���� �Xo@ Mo4=! �� GN�o(��, , /o.��� �o� �5��o%$ �o�x��)p,z( 00 ,)t,u,x(f , F�oE�. �oD0 ��K h��$u F�oE�. '�,�,,w , ��(��5 I(�NG �N:, G(�$�� , I(�oN +�o�: �o� ��x��y �o ,�0
�:��N� \��S , '���v �:��N� I(�N �� '��� ���� .
2Deterministic optimal control
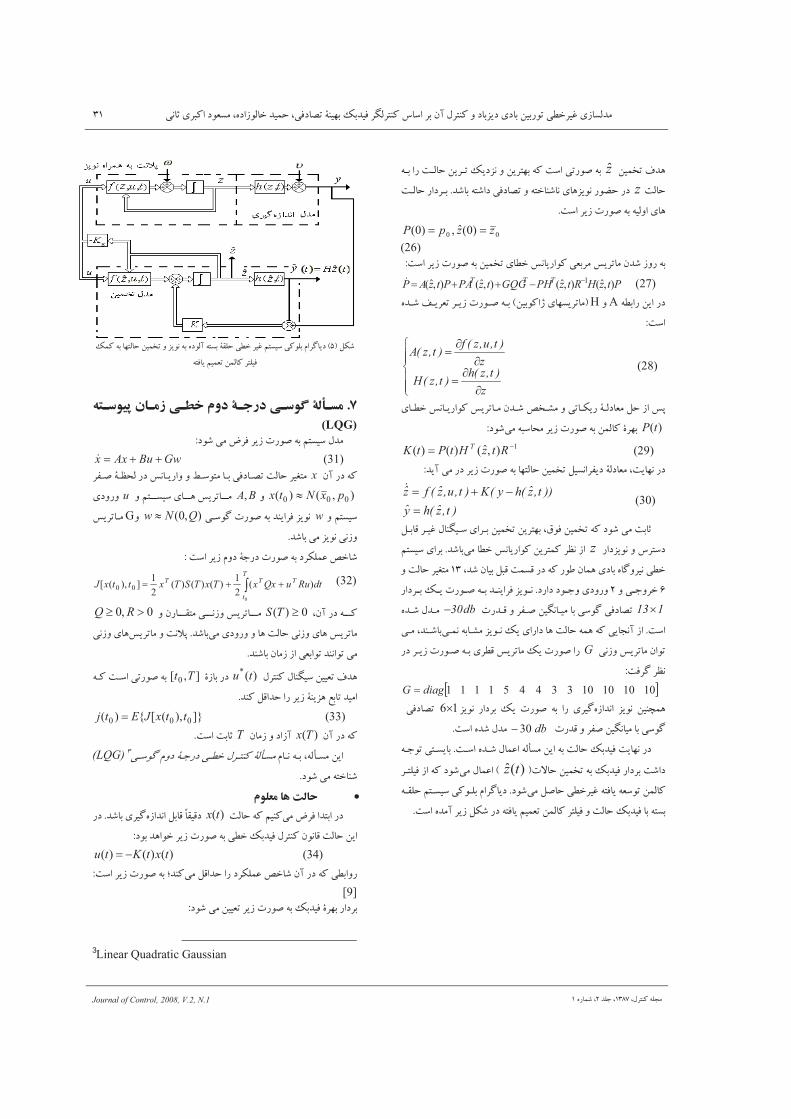
':�E!�� ���I(� '��� J����$ �D0��K ����� , B�.� �� +"�L!���� �5��%$ M��;� ����5 ����:�!�0 ���6� �N�O '���� ��PE� 31
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
J��V$ ���z �o� �� Wo!�6 J(�o$ �(�IN , J(��;� �� W.� �$��@ ��W!�6z �%$ , ��0����N '��I(�N ��w6 ������ ����� �5� . Wo!�6 ����o�
W.� �(: #��@ �� ��!,� '��. 00 )0(ˆ,)0( zzpP
(26) W.� �(: #��@ �� J��V$ '�D0 GN�(���� �P��� G(�$�� +�� :,� ��:
PtzHRtzPHGQGtzPAPtzAP TTT ),ˆ(),ˆ(),ˆ(),ˆ( 1����� (27) ��(� J �D���A ,H ) '�;E(�$��J�����^( ��o� _o(�P$ �o(: #��o@ �o�
W.� :
66"
66!
��
��
z)t,z(h)t,z(H
z)t,u,z(f)t,z(A
(28)
'�oD0 GN�o(���� G(�$�o� +�o� UVo<� , �$�o�(� Mo!��P� \6 :� G�)(tP �� ��.�=� �(: #��@ �� J�!�� ��;� ���:
1),ˆ()()( � RtzHtPtK T (29) J��V$ \�EN��X(� M!��P� �W(�;N �� �;�!�6��(" �� �� �(: #��@ �:
)t,z(hy))t,z(hy(K)t,u,z(fz
��� (30)
\o��S �o�K ���L�o. '��o� J��V$ J(��;� �l�5 J��V$ �� ��� �� W��O ���I(�N , B��.�z �� �D0 GN�(���� J(���� �4N :� ���� . F�E�. '���
S W�ES �� �� ��R +��� '��� ���,��N �D0 ��� +��� \�13 , W!�6 ��x��6 , �oo ,�02 ���� ��oo , '�,�, . ����oo� �oo( #��oo@ �oo� �oo�(��5 I(�ooN113� #��oS , �Xo@ J�LN�o�� �� �.�� �5��%$db30� ��o� ��o�
W.� .�� �� �(�N" :�� �o�N ���o<� I(�oN �( '���� �� W!�6 �o� ���o��� �N:, G(�$�� +��$G �� �o(: #��o@ �o� '�DS G(�$�� �( #��@ ��
W5�� �4N: � 10101010334451111diagG
��:��N� I(�N J��g� I(�N ����� �( #��@ �� �� '���16� �5��%$ #��S , �X@ J�LN��� �� �.��db30� ��� W.� ��� .
� W!�6 ����5 W(�;N � Wo.� ��o� ���&� �!pE� J(� �� . �o �$ ��oE(�� W��� J��V$ �� ����5 �����#)�6))(ˆ tz (�� ���&� :� �� ��� �o��5
��5�( �P.�$ J�!�� �� \@�6 �D0��K ��� . ��o� a����(�� �oC6 F�oE�.W.� ���" �(: \�� �� ��5�( F��P$ J�!�� ���5 , W!�6 ����5 �� ��E�.
\�� )5 (a����(� ���� J��V$ , I(�N �� ���!" ��E� MC6 �D0 ��K F�E�. �;�!�6 ��� ����5�( F��P$ J�!�� ���5
7 . ��GG���� ,�GG�6 �GGM1 a-! [GGL2! �GG��� ["PGGJ�
(LQG) �� {�5 �(: #��@ �� F�E�. ������:
GwBuAxx ��� (31) +" �� ��x �Xo@ Mo4=! �� GN�o(��, , /o.��� �o� �5��o%$ W!�6 ��x��
),()( 000 pxNtx 5 ,BA, , F�oooE�. '�ooo� G(�$�ooo�u '�,�,, F�E�.w �o.�� #��@ �� ��(��5 I(�N),0( QNw 5 ,G G(�$�o�
���� �� I(�N �N:, . U0�� W.� �(: a,� M �� #��@ �� ����&:
3 ��T
t
TTT dtRuuQxxTxTSTxttxJ0
)(21)()()(
21]),([ 00
(32)
�+" �� �ooo�0)( 7TS , +��oooC�� �oooN:, G(�$�ooo�0,0 $7 RQ �� '�,�, , �� W!�6 �N:, '�� G(�$�� ���� .G(�$�� , WNi� �N:, '��
����� +��: :� �P���$ ��N��$ �� . ��L�. J��P$ ��� ����� �)(* tu �:�� ��],[ 0 Tt �o� Wo.� �$��@ ��
��� \S��6 �� �(: M�(I� h��$ ���� . ]}),([{)( 000 ttxJEtj (33)
+" �� ��)(Tx +��: , ��:"T W.� W��O . a�oN �o� ��!poE� J(� �o.�� a,� Mo �� �oD0 ��o��� M!poE�3 (LQG)
��� �� ��0��� . )a��`� �� �"�4
�� {�5 ����� �� W!�6 �� F���)(tx �:��N� \��S q�C�S� ���� '��� . ����� ����0 �(: #��@ �� �D0 ����5 ����� +�N�S W!�6 J(�:
)()()( txtKtu � (34) �� \S��6 �� ����& U0�� +" �� �� �D��,� W.� �(: #��@ �� ���� :
[9] ��� �� J��P$ �(: #��@ �� ����5 ��;� �����:
3Linear Quadratic Gaussian
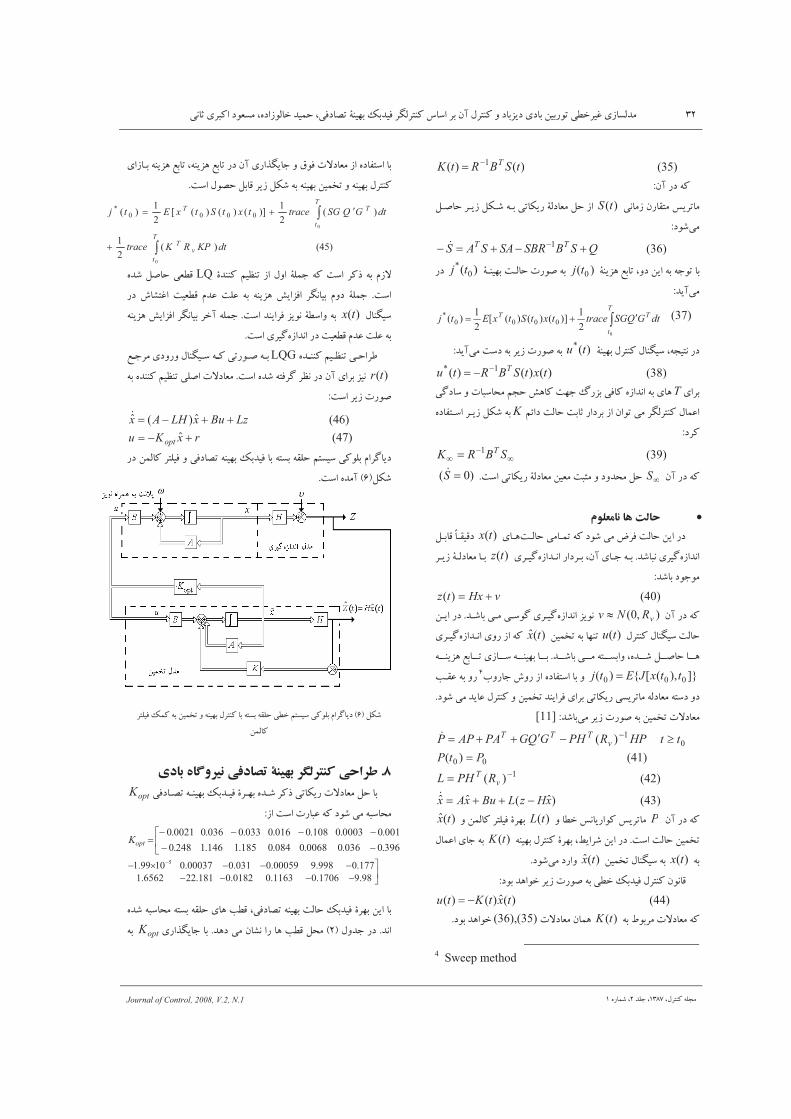
32 ':�E!�� ���I(� '��� J����$ �D0��K ����� , B�.� �� +"�L!���� �5��%$ M��;� ����5 ����:�!�0 ���6� '���� ��PE��N�O
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
)()( 1 tSBRtK T� (35) +" �� ��:
�N��: +��C�� G(�$��)(tS \�o� �o� �$��(� M!��P� \6 :� \o@�6 �o(:�� ���:
QSBSBRSASAS TT ���� �1� (36)
M�(I� h��$ �,� J(� �� � �$ ��)( 0tj Mo��;� Wo!�6 #��@ ��)( 0* tj ��
�� �(":
3 ��T
t
TT dtGQSGtracetxtStxEtj0
21)]()()([
21)( 0000
* (37)
M��;� ����� ���L�. ����N ��)(* tu (: #��@ ���� W.� �� � �(" : )()()( 1* txtSBRtu T�� (38)
'���T ����. , #��.�=� F6 ���� W; ��I� �5�� �:��N� �� '��F]�� W!�6 W��O ����� :� +��$ �� �L!���� ���&�K ���X�o.� �o(: \�� ��
���:
8�
8 SBRK T1 (39) � �� +" �8S �,�=� \6 ��P� J�P� W��� ,W.� �$��(� M! .)0( S�
)a��`��< �� �"�4
�� {�5 W!�6 J(� ����� Wo!�6 ���o�$ �� '�o�)(tx \o��S q�oC�S��:��N� ����N '��� . �:��oN� ����o� �+" '�o �o� '�o��)(tz o� �o(: Mo!��P� �
���� �� ��: vHxtz �)( (40)
+" �� ��),0( vRNv 5 �:��N� I(�N �o��� �o� �o.�� '�o�� . Jo(� �� ����� ���L�. W!�6)(tu J��V$ �� �;�$)(ˆ tx �:��oN� ',� :� �� '�o��
ooo� ��oooE��, ���ooo� \ooo@�6 �ooo��ooo��� � . �ooo�(I� h��ooo$ ':�ooo. �ooo��;� �ooo�]}),([{)( 000 ttxJEtj v,�� 9,� :� ���X�.� �� ,4 >oC& �� ,�
��� �� �(�& ����� , J��V$ ��(��5 '��� �$��(� �E(�$�� �!��P� ��.� ,�. �� �(: #��@ �� J��V$ #)��P� ����: [11]
HPRPHGQGPAAPP vTTT 1)( ������ 0tt 7
00 )( PtP (41) 1)( � v
T RPHL (42)
)ˆ(ˆˆ xHzLBuxAx ���� (43) +" �� ��P , �D0 GN�(���� G(�$��)(tL , J�!�� ���5 ��;�)(ˆ tx
W!�6 J��V$W.� . ���;� ����� ��;� �/(��� J(� ��)(tK ���&� '� �� ��)(tx J��V$ ���L�. ��)(ˆ tx �� ���, ���.
��� ����0 �(: #��@ �� �D0 ����5 ����� +�N�S: )(ˆ)()( txtKtu � (44)
#)��P� �� � s����� )(tK #)��P� +���(36),(35) ��� ����0.
4 Sweep method
'�:�o� ��(I� h��$ ���(I� h��$ �� +" '��nL(� , l�5 #)��P� :� ���X�.� ��W.� ��%6 \��S �(: \�� �� ���;� J��V$ , ���;� �����.
(45))(21
)(21)]()()([
21)(
0
0
0000*
3
3
�
��
T
tv
T
T
t
TT
dtKPRKtrace
dtGQSGtracetxtStxEtj
����� F�4�$ :� �,� M� �� W.� ��m �� a:)LQ �PDS ��� \@�6W.� .W& �� ��(I� �(�I5� �LN��� a,� M� W�PDS a�& �� 9�<�K�
���L�.)(tx W.� ��(��5 I(�N MD.�, �� .�� ��(I� �(�I5� �LN��� �0"�:��N� �� W�PDS a�& W& �� W.� '��� .
��oo��� F�o4�$ �o6��RLQG hoo �� '�,�, ���L�o. �oo� �$��o@ �o�)(tr W.� ��� ��5�� �4N �� +" '��� I�N . �� ����� F�4�$ �@� #)��P�
W.� �(: #��@: LzBuxLHAx ��� ˆ)(� (46)
rxKu opt �� ˆ (47) ��� a����(�� ���;� ����5 �� ��E� �C6 F�E�. �5��%$ �� J�!�� ���5 ,
\��)6( W.� ���".
� \�)6 (��� a����(�� ���5 ��� �� J��V$ , ���;� ����� �� ��E� �C6 �D0 F�E�. J�!��
8 .��!�&� [��� �Q"�� �4��_ (!�� ���-��<
��o� ��m �$��(� #)��P� \6 �� ���o�5 ��o;� �5��o%$ �o��;�optK :� W.� #���& �� ��� �� ��.�=�:
��
�������
396.0036.00068.0084.0185.1146.1248.0001.00003.0108.0016.0033.0036.00021.0
optK
��
���������� �
98.91706.01163.00182.0181.226562.1177.0998.900059.0031.000037.01099.1 5
���;� W!�6 ����5 ��;� J(� �� �5��%$ ��� ��.�=� ��E� �C6 '�� >DS ��N�. �,� ��)2( \=��� >DS ��� �� +�<N ��. �'��nL(� �optK ��

':�E!�� ���I(� '��� J����$ �D0��K ����� , B�.� �� +"�L!���� �5��%$ M��;� ����5 ����:�!�0 ���6� �N�O '���� ��PE� 33
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
����5 ��;� '� sK )>DS ���(� ',� :� ���" W.� �� ( �� +��$;V.����� �E(�C� , ����<� �� � .
9 . (6�� ���� ����� ���&� ��sK :� ���X�o.� �o� ��o� �o�m /o��,� ?�R ���" W.� ��
�oC6 F�oE�. ��o�5� ���,Io5� F�E�. �� W!�6 ����5 ���&� , >DS ���(� ��E� ����� �o� �oD0��K F�oE�. �I(�oN +,�o� �oD0��K F�E�. �W!�6 �. ��I(�N)(�N�:��N� , ��(��5 I '��� ( �o��5 :� ���X�o.� �o� �oD0��K F�oE�. I�N ,
��o� �o� �.��� ��5�( �P.�$ J�!�� . �o���� �� F�oE�. �o.�� ��o4�� J(�o�W.� ��� ��5�� �4N �� �����$ ���&� . ��!,� W&�.) ��o� �DCN ( Jo(� �� ��o�
�!pE�5/12 ���N W&�. �� �(�IN �� �W.� ��N�O �� ���)12 �o� �o�� �o�N�O (W.� '��� J����$ . ����o�$ W&�. J(�$)��2/16 Wo.� �o�N�O �o� �o�� . +�o�: �,�6 �� �����$7/1 W.� ��N�O . �L(� MDCN �( �� ��� W&�. �����$ :� G�
#�N�o.�N '�o. �o( �o� �!�o6 �� ��,� �o� W.� ��!,� ���C� :� �$)�� �� v,��$ ��,� �� �.���.2 #����x$ M���� , ��N�O4/1 ��� �oO� +��o�& �� ��N�O ��
���� ���oS +" ',� J����o$ '�o� ��o� /.�$ ��� 9�� . �����o�$ k�o� \�o�'�,�, , F�E�. � ,�0 '�� \�� �� ��E� �C6 F�E�. '��)7 ( �o$)13 (
�� , �PS�, �:��N� ��W.� ��� ���� +�<N ��� a,: #��@. �. �� � ��� �� ��5�( F��P$ J�!�� ���5 ����& +��� '��� �oD0��K F�E
\�� �� �I(�N �� ���!" �E(�C� �(: '�� �� �D0��K ��E� MC6 F�E�. J�� '� ���o�$ +��� B��.� �� {�5 �� , I(�N J�5�� �4N �� +,�� W!�6 ����5 J�!�o� J��V$ F�E�. , I(�N �� ���!" F�E�. , �����$ ���&� ����� �� �;�!�6
W.� ��5�� #��@ ��5�( F��P$. o� �� ��R +��� ��o��� �o� +�o<N �o� \� #�N�o.�N , ���o� v�oD� '���o(�� , �(���� '���� ��E� �C6 F�E�. �.��
����� �� ���C� \S��6 �� J����$ +��$ , ^��!, , W&�. . �C6 F�E�. �.�� '���o(�� , �o(���� '���� �o��(� �o� �,io& �o�5�( F�o�P$ J�!�� ���5 �� ��E�
^��!, , W&�. #�N�.�N , ���� v�D� ���S ���C� \S��6 �� J����$ +��$ ,���� I(�N +,�� �D0��K F�E�. �.�� �� ��(�IN �N��V�� ���� �� . +�o��
k�� \�� �� ��R �o�5�( F�o�P$ J�!�� ���5 :� ���X�.� �� ����� �� +�<N �����N +��� �� I(�N :� ���N #�N�.�N +��$ �� �D0��K F�E�. �� .

34 ':�E!�� ���I(� '��� J����$ �D0��K ����� , B�.� �� +"�L!���� �5��%$ M��;� ����5 ����:�!�0 ���6� '���� ��PE��N�O
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
�,�)2 (�C6 F�E�. '�� >DS �C6 F�E�. �:�� , W!�6 ����5 �� ��E��5��%$ ���;� ����5 �c)- �)!�9� N�J����%�� �� ��J� �9�4
��!�&� ���� �c)- �)!�9�N�J�� ��%�� �� ��J� �9�4
�"�4 �c)- �)!�9� N�J��6�� �9�4
2356106.18 j�� 4.28884.23 j�� 4.28884.23 j��
2356106.18 j�� 4.28884.23 j�� 4.28884.23 j��
172848.17 j�� 4.213428.27 j�� 4.213428.27 j��
172848.17 j�� 4.213428.27 j�� 4.213428.27 j��
58.31324.26 j�� 08.37504.22 j�� 08.37504.22 j��
58.31324.26 j�� 08.37504.22 j�� 08.37504.22 j��
75.1969.3 j�� 37730 j�� 37734.0 j��
75.1969.3 j�� 37730 j�� 37734.0 j��
2456� 59.914.37 j�� 59.914.37 j��
46.61� 59.914.37 j�� 59.914.37 j��
22.7� 40� 42.0�
586.0� 5.5� 0
442.0� 8.� 0
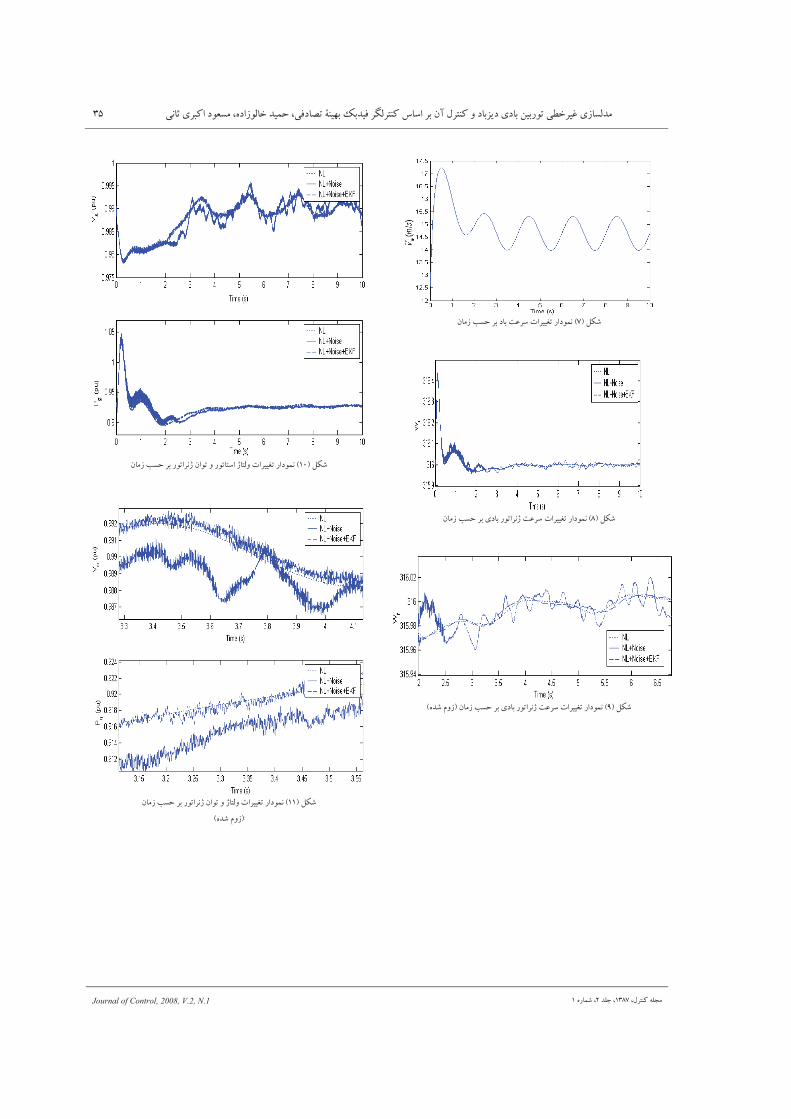
':�E!�� ���I(� '��� J����$ �D0��K ����� , B�.� �� +"�L!���� �5��%$ M��;� ����5 ����:�!�0 ���6� �N�O '���� ��PE� 35
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
\��)7 (+��: >E6 �� ��� W&�. #����x$ �����N
\��)8 (+��: >E6 �� '��� ��$��N^ W&�. #����x$ �����N
\��)9 ( +��: >E6 �� '��� ��$��N^ W&�. #����x$ �����N)a,: ���(
\��)10 (+��: >E6 �� ��$��N^ +��$ , ��$��.� ^��!, #����x$ �����N
\��)11 (+��: >E6 �� ��$��N^ +��$ , ^��!, #����x$ �����N
)��� a,:(
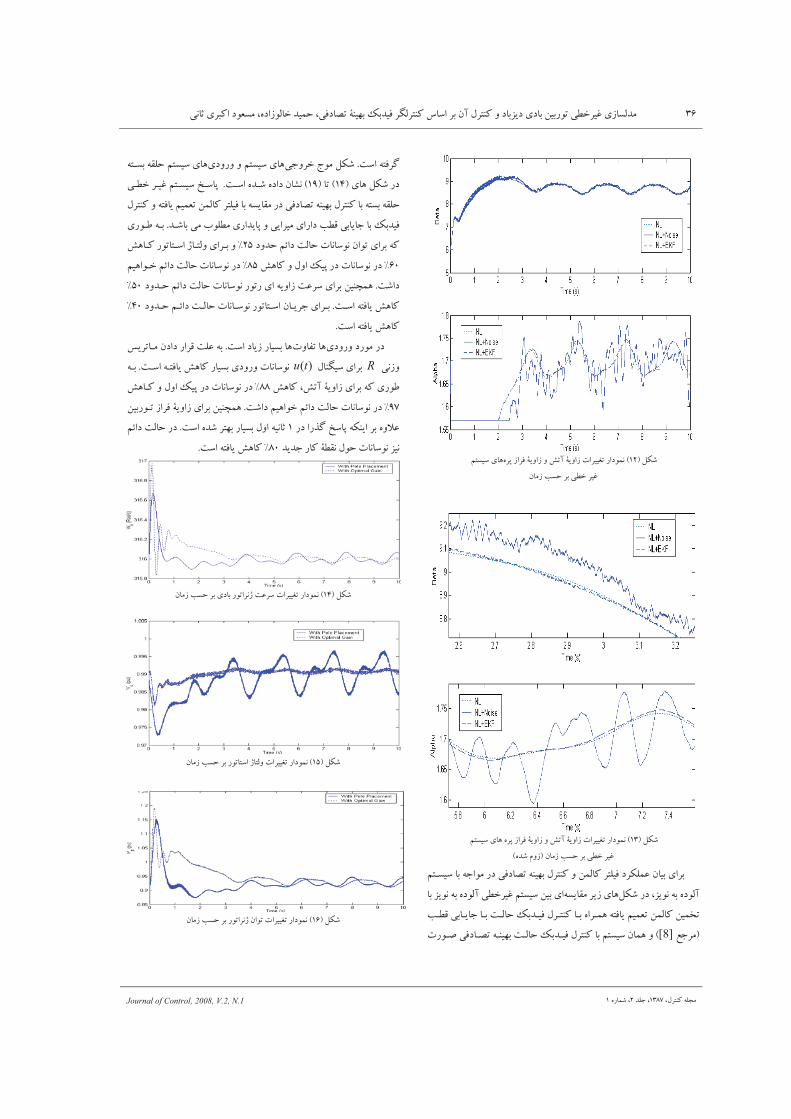
36 ':�E!�� ���I(� '��� J����$ �D0��K ����� , B�.� �� +"�L!���� �5��%$ M��;� ����5 ����:�!�0 ���6� '���� ��PE��N�O
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
\��)12 (��� :��5 M(,�: , �$" M(,�: #����x$ �����N F�E�. '�� +��: >E6 �� �D0 ��K
\��)13 (#����x$ �����N F�E�. '�� ��� :��5 M(,�: , �$" M(,�: +��: >E6 �� �D0 ��K)��� a,:(
���;� ����� , J�!�� ���5 ����& +��� '��� �5��%$ F�oE�. �� � ��� ��\�� �� �I(�N �� ���!" �E(�C� �(: '�� �� I(�N �� ���!" �D0��K F�E�. J�� '�
���o�5 ��o��� �o� ���o�� ��5�( F��P$ J�!�� J��V$ >oDS ���o(� �o� Wo!�6) h ��[8] ( �o��;� Wo!�6 ���o�5 ����� �� F�E�. +��� , �5��o%$ #��o@
W.� ��5�� .� ,�0 k�� \�� '�,�, , F�E�. '�� ��oE� �C6 F�E�. '�� '�� \�� ��)14 ( �$)19 ( Wo.� ��o� ���� +�<N . �oD0 �o�K F�oE�. �o.��
���;� ����� �� ��E� �C6 �5��%$ �5 �� �E(�C� �� ��5�( F��P$ J�!�� �� ����� , >DS ���(� �� ����5 �o��� �� v�D� '���(�� , �(���� '���� . '��oR �o�
�,�6 F]�� W!�6 #�N�.�N +��$ '��� ��25 % ���o� ��$��o.� ^�o�!, '��o� ,60 % ���� , �,� ��� �� #�N�.�N ��85 % F����o0 F]�� W!�6 #�N�.�N ��
W��� .� �(,�: W&�. '��� J��g�� �,�o6 F]�� W!�6 #�N�.�N ��$� '50 % Wo.� ��5�( ���� . �,�o6 Fo]�� Wo!�6 #�N�o.�N ��$��o.� +�o(� '��o�40 %W.� ��5�( ���� .
'�,�, ���� �� #,�X$ �� W.� ��(: ���E� �� . G(�$�o� +��� ���S W& �� �N:,R ���L�. '���)(tu '�,�, #�N�.�N Wo.� �o�5�( ���� ���E� . �o�'��R �� �$" M(,�: '���� ����88 % ���o� , �,� ��� �� #�N�.�N ��
97 %W��� F����0 F]�� W!�6 #�N�.�N �� . J����o$ :��5 M(,�: '��� J��g�� �� ��n� �.�� ���(� �� �,i&1 W.� ��� ��;� ���E� �,� ��N�O . F]�� W!�6 ��
(� ��� MDCN ��6 #�N�.�N I�N �80 %W.� ��5�( ���� .
\��)14 ( +��: >E6 �� '��� ��$��N^ W&�. #����x$ �����N
\��)15 (+��: >E6 �� ��$��.� ^��!, #����x$ �����N
\��)16 ( +��: >E6 �� ��$��N^ +��$ #����x$ �����N

':�E!�� ���I(� '��� J����$ �D0��K ����� , B�.� �� +"�L!���� �5��%$ M��;� ����5 ����:�!�0 ���6� �N�O '���� ��PE� 37
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
\��)17 ( +��: >E6 �� ��$��N^ ��$��.� +�(� #����x$ �����N
� \�)18 ( +��: >E6 �� �D0 ��K F�E�. �$" M(,�: #����x$ �����N
\��)19 ( >E6 �� �D0 ��K F�E�. '�� ��� :��5 M(,�: #����x$ �����N
+��:
10 .� ��< (��� ':�oE!�� �!�C� J(� �� �oD0��K , ��o�g�� F�oE�. �o( :� �oC�S� ���oEN
J����$ >���- \��o� ��o�I(� '��o� ���,��N ��$��N^ �o$ '��o� J���� ��o$��N^�(�C!�� �!�C�N� W5��� ������ +��$ ���$��.� +:�0 , ��C�N� /0 �� �� a�N�
�� �D0��K W!�6 '�w5 #)��P� j��� ��13 �o� \��o<$ �� Wo!�6 ��x�����.
���o� a�oN� ':�oE!�� B�o.� �� G-. Mo��;� ���o�5 �oL!���� �o6��R �o� ��o����$ �� ^��!, F�4�$ '��� �5��%$ �o( :� ���X�o.� �o� �(�oC!� J�o��� '
:� ���X�o.� �o� �o�(���!� +��o$ F�4�$ I�N , ��$��.� ������ +��$ ����� +��� �� a�N� ��� s�CN :� �P�., bN� �� :��5 M(,�: ����� . B��.� �� �� � �$ ��
J�o�V$ �o( �J�o��� � ,�0 ����� '��� ���(��5 I(�N �� , , �;�!�6 +���N, �5��%$ M��;� F�oE�. '��o� �o�(I� h��$ �� � �$ �� �5��%$ M��;� �!���� �(
��o�5�( F�o�P$ J�!�o� ���5 �� +" ����& , �(��� �6��R '��� ��$��N^����$�� �E(�C� >DS ���(� �� W!�6 ����5 �!���� �� ����� .
J�o�V$ �o� �oE(�C� �� �5��o%$ �o��;� ��o��� �o� ��oE� �oC6 F�E�. �.���(� �� �J�!�� J�o�� �o� ���� ��o� #�N�o.�N �o���� �� ���oD� �(���� >DS ��
!���� ')�� �]����L W.� �5��%$ M��;� � +�o* �� W.� ���N J(� �(�� I�N , '���� �� �L!���� v�V�N� W.� �5��%$ '�� �X!�� '���� �P!�D� ���� F�E�.
W.� � �� �5��%$ ���;� ����� '���$.
KL��� ]1[ $ �o�=� ��. �(�=D� ��PoE� �o0�� � �oC » �o( GN�o��5 ^�o�!, ��o���
�o�x�� ���0�o. 9,� �o� ���� :� \C�E� �I(� o��� �����$ �*�� ���,��N«. l�� �.��;� GN��X�� J��<�22 o24 W<;�(���1377 M=X@ �237o242
[2] J. R. Winkelman and S. H. Javid, ”Control design and performance analysis of a 6MW wind turbine generator,” IEEE Trans on PAS, Vol. 102, No. 5, pp. 1340-1347, May 1983. [3] R. Chedid and F. Morad and M. Basm , “Intelligent Control of a Class of Wind Energy Conversion Systems,” IEEE Trans on energy conversion, Vol. 14, No. 4, Dec 1999.
[4] B. S. Borowy and Z. M. Salameh, “Dynamic response of a stand-alone Wind Energy Conversion Systems with battery energy storage to a wind gust,”IEEE Trans on Energy Conversion, Vol. 12, No. 1, pp. 73-78, Mar 1997.[5] H.D. Battista, R. J. Mantz, “Sliding mode control of torque ripple in wind energy conversion systems with slip power recovery,” IEEE 1998.[6] Y. H. Song, A. T. Johns, “Nonlinear thyristor-controlled static VAR compensation,” The European Power Electronics Association, Brighton, Sept. 13-16, 1993.
]7[ ���PE� �N�O '���� ����6 ���:�!�0 » �o ,�0 ����5 �L!���� �6��R ��o�I(� '��o� J����$ �D0��K ������(� F�E�. '���« . GN��oX�� J����o��
�;� �+��;$ �+��(� l�� ��!� J��1382.
]8[ ����6 ���:�!�0���PE� �N�O '���� » Wo!�6 ���o�5 �oL!���� �o6��R��K �����oo�(� F�ooE�.��oo�I(� '��oo� J����oo$ �ooD0 «� GN��ooX�� J�oo���:�,�
�.��;�+��(� l�� (ICEE 2004)� W<;�(��� ��;<�1383. [9] M. S. Grewal, A. P. Andrews, “Kalman filtering: theory and practice”, John Wiley, Press 2001.
]10[ ���PoE� �N�oO '�o��� ����6 ���:�!�0R Mo��;� ���o�5 �oL!���� �o6�� ��o�I(� '��o� J����o$ �oD0��K �����o�(� F�oE�. '��o� �5��%$ �:�oN � J���
�;� �+��;$ �+��(� l�� ��!� J�� GN��X��1383.[11] A.E. Bryson, Y.C. Ho, Applied Optimal Control,Hemisphere, 1975.

38 ':�E!�� ���I(� '��� J����$ �D0��K ����� , B�.� �� +"�L!���� �5��%$ M��;� ����5 ����:�!�0 ���6� '���� ��PE��N�O
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
����e: ��5� ��� �� '����x�� WE�!:
qsds 00 , ��.� ��<N ���'����=� '��.�� �� ��$qd, ��>E6pu
qrdr 00 , '�� ��=� '��.�� �� ��$� ��<N ���qd,>E6��pu
qsds ii , '�� ��=� '��.�� �� ��$��.� +�(� qd,>E6��pu
qrdr ii , '�� ��=� '��.�� �� ��$� +�(� qd,>E6��pu
qcdc ii , '�� ��=� '��.�� �� +:�0 +�(� qd,>E6��pu
qLdL ii , '�� ��=� '��.�� �� ���E(�$ +�(� qd,>E6��pu
qTLdTL ii , '�� ��=� '��.�� �� ��C�N� /0 +�(� qd,>E6��pu
ss VI , >E6�� ��$��.� +�(� , ^��!,pu
refP >E6�� �(�C!� ��$��N^ ���N +��$pu
gP �C!� ��$��N^ +��$>E6�� �(pu
rs RR , >E6�� ��$��.�, ��$� W�,�C�pu
TLTL XR , >E6�� ��C�N� /0 GN����� , W�,�C�pu
CL XX . GN����� , GN���,�N�SVC >E6��pu
qsds VV , '�� ��=� '��.�� �� ��$��.� ^��!,qd ,>E6��pu
qbdb VV , �� B�� ^��!, '����=� '��.�� �� W(�;Nqd ,>E6��pu
refV ��$��.� ���N ^��!,>E6��pu
b+ ���N W&�. (314rad/s)
r+ '��� ��$��N^ ��$� W&�. (rad/s)
\(��$ '��� �(�� �(��C�(pu) �(�� +��$ :KVA660 F�E�. a��$ '��� �(�� ^��!, :V690 F�E�. a��$ '���
������ +��$ ����� +��� (SVC) : puX L 0.4 ,puX C 8.3
��C�N� s�D0 : W�,�C� :puRTL 015.0 .GN����� :puX TL 15.0
���I(� '��� J����$ ��5 #�%V<� J����$ j�N �C5� ��=� � '� ��� �.
��$� �DS 43 ��� +��$ F�4�$ hDS ��(�� �� F�4�$(Stall)
��� J�(�� hDS W&�. 4-3 ��N�O �� ��� ��� ���N W&�. 12 ��N�O �� ���
��� ')�� hDS W&�. 25 ��N�O �� ��� ��$��N^ ���N +��$ 660 #�,���
��$��N^ +,���. W&�. 1500 �C�S� �� �,� �N��: W��O 75/19
G����� >(�| 1:56
'��� ��$��N^ ��5 #�%V<� ���N ^��!,)W!,( 690 �K��� j�X$��)���( 60
���N GN���5)I$��( 50 |���N +��$ >(� 91/0 G�R�ooo�x� GN�ooo����
�����(pu) 88/2 +,���oo. W&�oo.
(RPM) 1500
��$��.� W�,�C�(pu) 0063/0 ��$� W�,�C�(pu) 0059/0 ��$��.� GN�����(pu) 0489/0 ��$� GN�����(pu) 0058/0
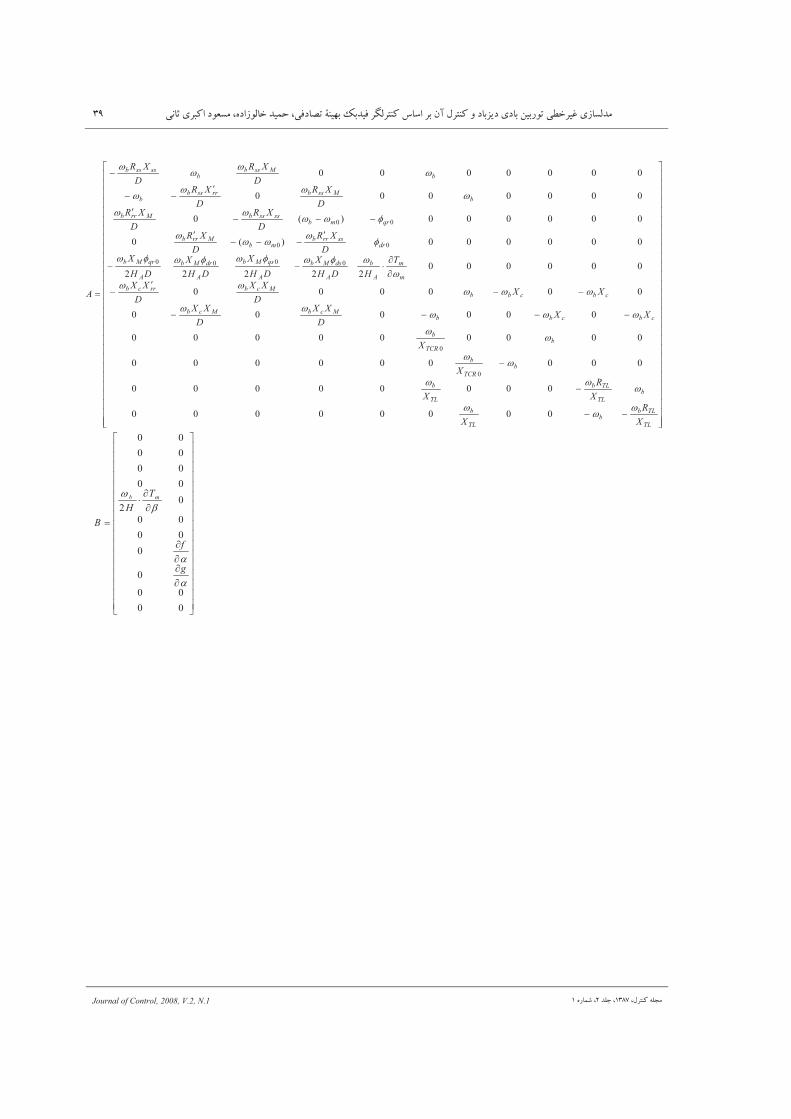
':�E!�� ���I(� '��� J����$ �D0��K ����� , B�.� �� +"�L!���� �5��%$ M��;� ����5 ����:�!�0 ���6� �N�O '���� ��PE� 39
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
����������������������������
�
�
����������������������������
�
�
��
�
�
����
���
�
��
,��
����
�
����
���
�
TL
TLbb
TL
b
bTL
TLb
TL
b
bTCR
b
bTCR
b
cbcbbMcbMcb
cbcbbMcbrrcb
m
m
A
b
A
dsMb
A
qsMb
A
drMb
A
qrMb
drssrrb
mbMrrb
qrmbssssbMrrb
bMssbrrssb
b
bMssb
bssssb
XR
X
XR
X
X
X
XXD
XXD
XX
XXD
XXD
XX
THDH
XDH
XDH
XDH
XD
XRD
XRD
XRD
XRD
XRD
XRD
XRD
XR
A
++
+
+++
++
++
+++++
+++++
++9+9+9+9+
9+
+++
9++++
+++
+
++
++
00000000
00000000
000000000
000000000
000000
000000
00000022222
000000)(0
000000)(0
0000000
0000000
0
0
0000
00
00
�����������������
�
�
�����������������
�
�
����
��
,
0000
0
00000
02
00000000
%
%
-+
g
f
TH
B
mb
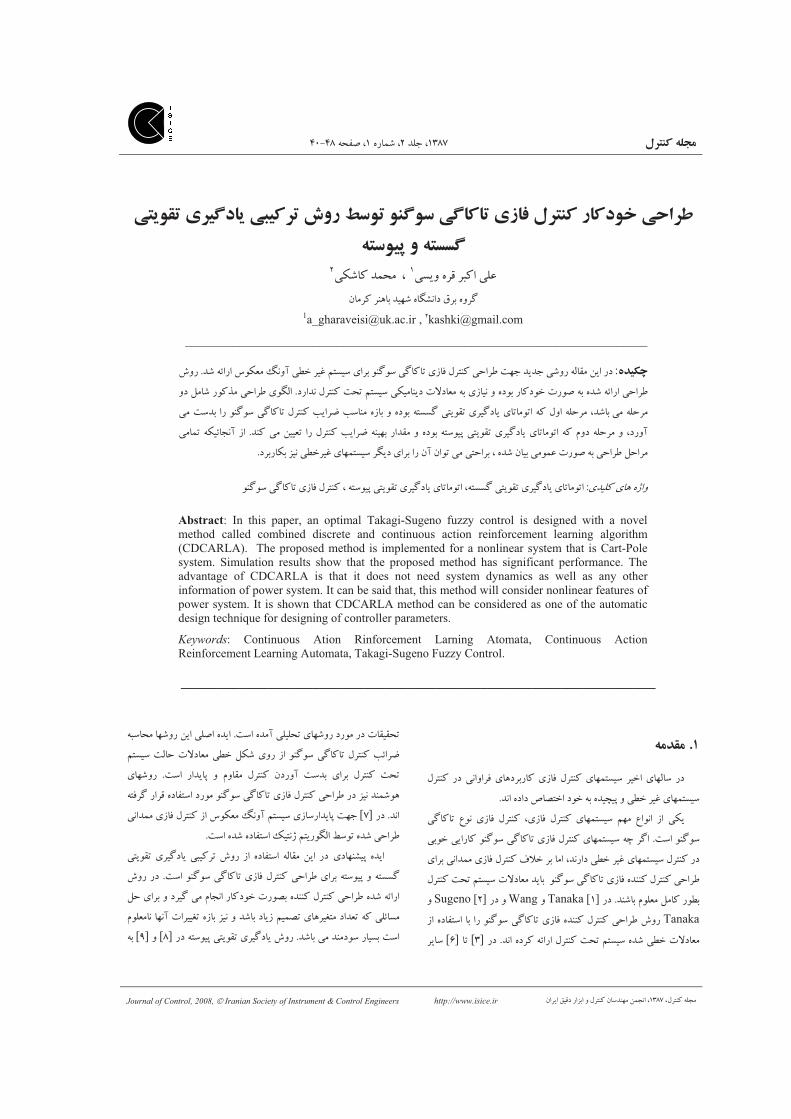
��� �� � 1387� �2����� �1�=X@ �48-40
Journal of Control, 2008, � Iranian Society of Instrument & Control Engineers http://www.isice.ir ������ ��1387S� ��I�� , ����� +�.��;� J�N� ��+��(� ?
4��_� 6�� ��� 2�!�1( ����� �� 5-2 0��� ������� )�!���( �9�)�� � - ��JJ������
&� E(, ��S �����1 ���� ��=� ��2
+���� ����� ��;� ��L<N�� l�� �,�� [email protected] , [email protected]
____________________________________________________________________________
�%��+: � ��(�,� �!�C� J� � (6��R W; �� :�5 �����' ����$� ��� ����.' .�K F�E�D0 �� �� �]��� B��P� uN," . 9,�6��R� N , ���� �����0 #��@ �� ��� �]����:�' � #)��P� ��(������ .�����N ����� W=$ F�E .�L!�' 6��R� ,� \��� ���n�
� �6��� 6�� ������$���$� �� �,� �' (�����' �C$(�� ��| >.��� �:�� , ���� ��EE�(����$ ����� >� � W.�� �� ����.� �$���$� �� a,� �6�� , ���,"' (�����' �C$(�� ��;� ���C� , ���� ��.����| ��(P$ �� ����� >��� J� ��� .]�N" :�����$ ���
6��R \6���� ���& #��@ ��� ���6��� � ��� +�� �� ��� �� +" +��$' �(. �L��;��E' K�D0�� N�������� I.
�� �^�,' ���' :$���$��' (�����' �C$(�� ��EE�$���$� ��' (�����' �C$(�� �� � ��.�:�5 �����' ����$� ����.
Abstract: In this paper, an optimal Takagi-Sugeno fuzzy control is designed with a novel method called combined discrete and continuous action reinforcement learning algorithm (CDCARLA). The proposed method is implemented for a nonlinear system that is Cart-Pole system. Simulation results show that the proposed method has significant performance. The advantage of CDCARLA is that it does not need system dynamics as well as any other information of power system. It can be said that, this method will consider nonlinear features of power system. It is shown that CDCARLA method can be considered as one of the automatic design technique for designing of controller parameters.
Keywords: Continuous Ation Rinforcement Larning Atomata, Continuous Action Reinforcement Learning Automata, Takagi-Sugeno Fuzzy Control.
_________________________________________________________________
1.��%9�
�;!�. ��' 0��. ���;��E' :�5 �����' ��������' N�,��5� ����� ��.��;��E' K�D0 �� � ,�g��N� ���� z�%�0� ��0 �� �� .
(�� . F;� j��N� :���;��E' :�5 �����':�5 ����� �' ����$ j�N� W.� ����. .. �* �����;��E' :�5 �����' ����$� ���� ����.�( ��0� . ����� �����E�;' K�D0 �� :�5 ����� �i0 �� ��� ��N���' N����� ���'
6��R� :�5 ����� �����' ����$� �� ����.(. #)��P� �� ����� W=$ F�E����� a�P� \��� ��D� . ��]1[ Tanaka ,Wang �� ,]2[ Sugeno ,
Tanaka 6��R 9,�� :�5 ����� �����' ����$� :� ���X�.� �� �� ����.D0 #)��P�� . �����N� ���� �]��� ����� W=$ F�E . ��]3[ �$]6[ �.( �
C=$��;�,� ���� �� #�C' =$�� W.� ���" .�(@� ��� �( ��.�=� �;�,� J����$ ����� >]��|� ,� :� ����.' D0 \��� . W!�6 #)��P�� F�E
��� ����� W=$' �� , a,�C� ����� +��," W.��(W.� ��� .�;�,�' N ������� �� I6��R� :�5 �����' ����$� ��5�� ���S ���X�.� ���� ����.
�N� . ��]7[ �� W; (:�.���' .�:�5 ����� :� B��P� uN," F�E' N����� 6��R� ��L!� /.�$ ���(�N^ F��W.� ��� ���X�.� �. �(� �����;�<'� ��(��$ 9,� :� ���X�.� �!�C� J��� (�����' �C$(��
� , ��EE����� ��.�' 6��R� :�5 �����' ����$� W.� ����. . 9,� ��6��R ��� �]���� � a�N� �����0 #��%� ����� ������ ����� , ��' \6
]�E�� x�� ���P$ ������' �%$�: F(N , ���� ���x$ �:�� I�� a�P��N �;N" #��E� W.��� �����. ��� ���� . 9,�(�����' �C$(�� �� �� ��.�]8[ ,]9[ ��
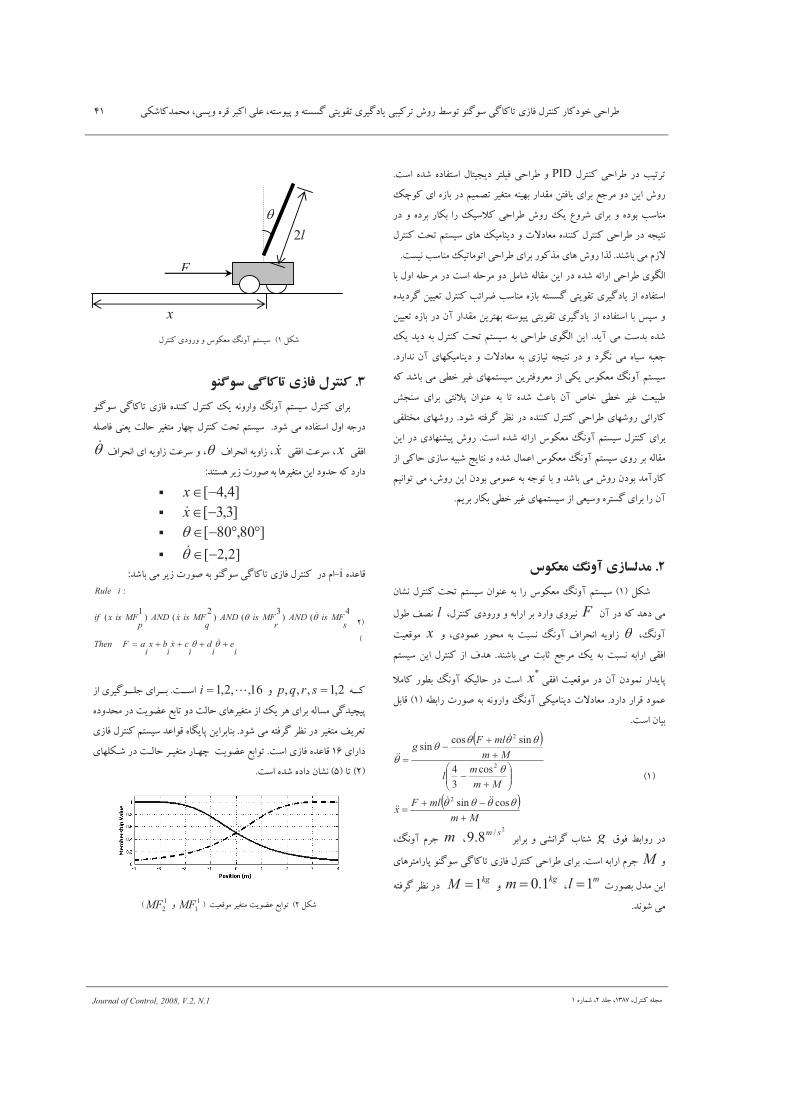
��.��� , ��EE� ��(�C$ '�����( �����$ 9,� /.�$ ����. �����$ ':�5 ����� �����0 �6��R ��������=� ��E(, ��S ���� �& 41
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
F
:
x
l2
$�$�6��R �� >� �����PID 6��R ,� 5�� ��(�W.� ��� ���X�.� ��� .� 9,�(��� h �� ,� J' (;� ���C� J�5��x�� ����%$ ��� �:�� �� F' �*��
��� , ���� >.���' j,��(6��R 9,� �� .i�� �� , ���� ���� �� ��N�6��R �� �� � , #)��P� ����� �����(������ �' .� ����� W=$ F�E
� a:)� ����� .�� 9,� �n!' ��� ���n�' 6��R� $���$��N >.��� ��WE . �L!�' 6��R� � �� ��� �]���( �� �,� �6�� �� W.� �6�� ,� \��� �!�C� J
:� ���X�.�(�����' �C$(�� P$ ����� >]��| >.��� �:�� ��EE������ J( �� :� ���X�.� �� G-. ,(�����' �C$(�� ����;� ��.�( �:�� �� +" ���C� JP$�� J
� W.�� ���� "(� .�(�L!� J' 6��R� . ���� �� ����� W=$ F�E( �( �. ��P �� ��� �N �� , ��LN�N ��:�' � , #)��P� ��(�����;�' ����N +" .
.� B��P� uN," F�E(�� ��5,�P� :�(. J��;��E' K�D0 �� �� �� �����R�K WP�D0 �� �Ni� +���& �� �$ ��� d&�� +" z�0� ���' �. �
]����� �;�,�' 6��R� ��� ��5�� �4N �� ����� ����� .�;�,�' X�V�� ���' . ������W.� ��� �]��� B��P� uN," F�E .� 9,����;�<' � ��( J
,� �� �!�C�' .���N , ��� ���&� B��P� uN," F�E(�� b�:�. �' ��6� :�� 9,� +��� ��"���� ���& �� � �$ �� , ����� � +���(� �9,� J� $N��� F
��� �� +"' ., ���E��P� . :���;��E' K�D0 �� �� ����(F .
2 .6�J"%�( O��`� f<-# \��)1 (.�. +���& �� �� B��P� uN," F�E� +�<N ����� W=$ F�E
�� +" �� �� ���F N�,�' �,�, , ����� �� ���,' ������l ��R _%N �uN,": ,�:(���& ��=� �� W�EN uN," ���=N� �' , �x PS��� W
C5�� �� W�EN �����(� W��O h �� ������� .� ����� :� ���(. J� F�E��(PS�� �� +" +���N ����C5� W�*x !�6 �� W.�� i��� ��D� uN," ��
���� ���S ���& .�P�� #)�(������ �D��� #��@ �� �N,��, uN,")1 ( \��S��W.� +�.
)1(
� �
� �Mm
mlFx
Mmml
MmmlFg
���
���
����
��
�
��
�
::::
:
:::::
cossin
cos34
sincossin
2
2
2
�����
�
��
l�5 /��,� ��g <N��� v���� ����� ,2/8.9 sm �m �uN," a�
,M W.� ����� a� .���' 6��R� �����:�5' ����$� ��������� ����.' �( #��%� ��� Jml 1 �kgm 1.0 ,kgM 1 ��5�� �4N ���� �N��.
\�� 1( .��,�, , B��P� uN," F�E' �����
3 .6�� ���( ����� ���� ���' . ������ �N,��, uN," F�E(:�5 ����� ����� �' ����$� ����.
� ���X�.� �,� � ��� ��� ..�x�� ��;* ����� W=$ F�E� W!�6 �(�P� �@�5C5�� xC5� W&�. �� x�,�: �( ���=N� �:,�: W&�. , �(� �' ���=N�:�
� �,�6 �� ����(x�� J� #��@ �� ���:(���E� �: � ]4,4[�&x� ]3,3[�&x�� ]80,80[ ;;�&:� ]2,2[�&:�
��&�Si-:�5 ����� �� a�' ����$� : #��@ �� ����.(� �� ����:
)2(
ie
id
icx
ibx
iaFThen
sMFisAND
rMFisAND
qMFisxAND
pMFisxif
iRule
���� ::
::
��
�� 4()
3()
2()
1(
:
�ooo�2,1,,, srqp ,16,,2,1 �i Wooo.� .��ooo�' ��ooo ��' :�
��g���� ��� �!�E�' ��(x�� :� �����' �w& h��$ ,� W!�6( ��,�=� �� W�P$(x�� _�� ��5�� �4N �� �� ��� .������(�� J(. �&��S ��L�:�5 ����� F�E' ����' 16 :�5 ��&�S' W.� .�w& h���$( x�� ��o;* W o� �;�o� �� Wo!�6 �'
)2 ( �$)5 (W.� ��� ���� +�<N.
\��2 ( h���$�w&(x�� W�PS�� �� W)11MF ,1
2MF(

42 ��.��� , ��EE� ��(�C$ '�����( �����$ 9,� /.�$ ����. �����$ ':�5 ����� �����0 �6��R ��������=� ��E(, ��S ���� �&
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
\��3 (�w& h���$(x�� W�C5� W&�. �� )21MF ,2
2MF(
\��4 (�w& h���$(x�� W�,�: �( �)31MF ,3
2MF(
\�� 1) \��5( �w& h���$(x�� W�,�: W&�. �(� �' )41MF ,4
2MF(
�D��� �� � �$ ��)2 (:�5 ��&�S ��' x�� b�� \�����%$ ��F1 �� ���� .������( J���' 6��R� �� ����� ����� \���( �80 x����%$ ��P$ F���N�� ���C� J .
4. �Q"�( ��!��C( 4��_� !�1 �% ��� 2�6��( ����� ����
� 9,� �����;�<' �(��L!� :� ���X�.� �� /C5 ��!�C� J( F�(�����' �C$(�� ����� W=$ ��L�.� �����N� ,)�N,��, uN," ( �� ����� ����� ,
(. ��6��R � ��E� �C6 ����� F�E� ���������' :�5 ����� �����' ����$� � a�N� ����.� ���� .R 9,�6��� ����' : �6�� ,�(� �� ����: ��-� ��4��: P$����� >.��� �:�� J' ��(x�� :� �����'
�%$��$���$� :� ���X�.� �� F' (�����' �C$(�� ��EE�2
�a-! ��4��: (��;� J�5�(x�� ���C� J��%$ ��P$ �:�� �� F�� J�$���$� :� ���X�.� �� ���' (�����' �C$(�� ����.�3
2 Discrete Action Reinforcement Learning Automata 3 Continuous Action Reinforcement Learning Automata
�X$��L!� �' ��R6� L�<* ���� d&�� l�5 �6�� ,� �� ����� ������ ���g���� ]�E�� �� x�� ���P$ �� �������' �%$�: �;N" �� F(W.� �� .
�g���� :� ���X�.� �� J(S� J�EN�� �L!� J�x$ �,�6 ?��x�� #������' �%$� FN ������N :�� ����� .
5 .�������( )�!���( �9�)�� ��JJ�
� 9,� �,� �6���<��;�' 6��R ��� $���$� \��� ����� ������ (�����' �C$(�� EC$ �V� ��* �� �� W.� ��EE��� F� ���:
1.5 .�-� a�� :%� �-��( g������( �&��N � �� � �$ ��(x$ �,�6 �����x�� #������' �%$� ���<� F)ia ���
ib���...� ie�� (:�5 ��� ��' �����(� +�E�� � �n! ������ N��$� a��$ Fx������' �%$�x�� �,�� b�� �� �� F��%$ ��F4 EC$��� F�F .� #���& ��( �L
x�� a��$ ���� #��@ �� �� ���(�$�� �(L� �4N �� G��( +" �D. �� �� F �� >.����(:�5 ��&�S �' � +��. �� ��LN" �����(�$�� J( G(� � �,�
x���� �� ���� .������(��� J' .�x�� �,�� b�� B��P� uN," F�E��%$ �� F�P$ \��S(:� ��$���& �� W.� _:
1- �,� �,�� :x������' ia )16,,2,1 �i(2- a,� �,�� :x������' ib )16,,2,1 �i(3- a�. �,�� :��x����' ic )16,,2,1 �i(4- a��;* �,�� :x������' id )16,,2,1 �i(5- F�� �,�� :x������' ie )16,,2,1 �i(
2.5 .a-! a�� :`����� �6�� Y( g�� �-�� �� �� �h����� :� G� �P$(�;�,�� _' x����� �:�� ��' �� �,�� ��(P$ ������ J . ���
6��R a,� �6�� ���� �*�� ��:�� ��R� �.(� ��L�� ��P� +�* ��� ���: �;N" ���P$(6��R �,� �6�� �� ����0 ��� N)�R� �� ����0 .�g��� J
6��R �,� �6�� ��� v�V�N� F� ��:�� ���P$ ���� �.(� ��L�� �P� ��� ��� 6��R a,� �6��� ����N� ����0 ��R �� ��<�� .������( �� , �� �:�� ���P$ J
�N�� �=!�%� �;N" ��R �' ��L�� W&�. :��( 6��R �6�� ,�� �� ����. x$ �,�6��x�� �,�� b�� #��� :� �55- �$55 �� �� ���� ��11 ,�E� �:��'
EC$���� �� F . �,� )1 (�� �:��' �;�,��' x����%$ ��� +�<N �� F� ���.
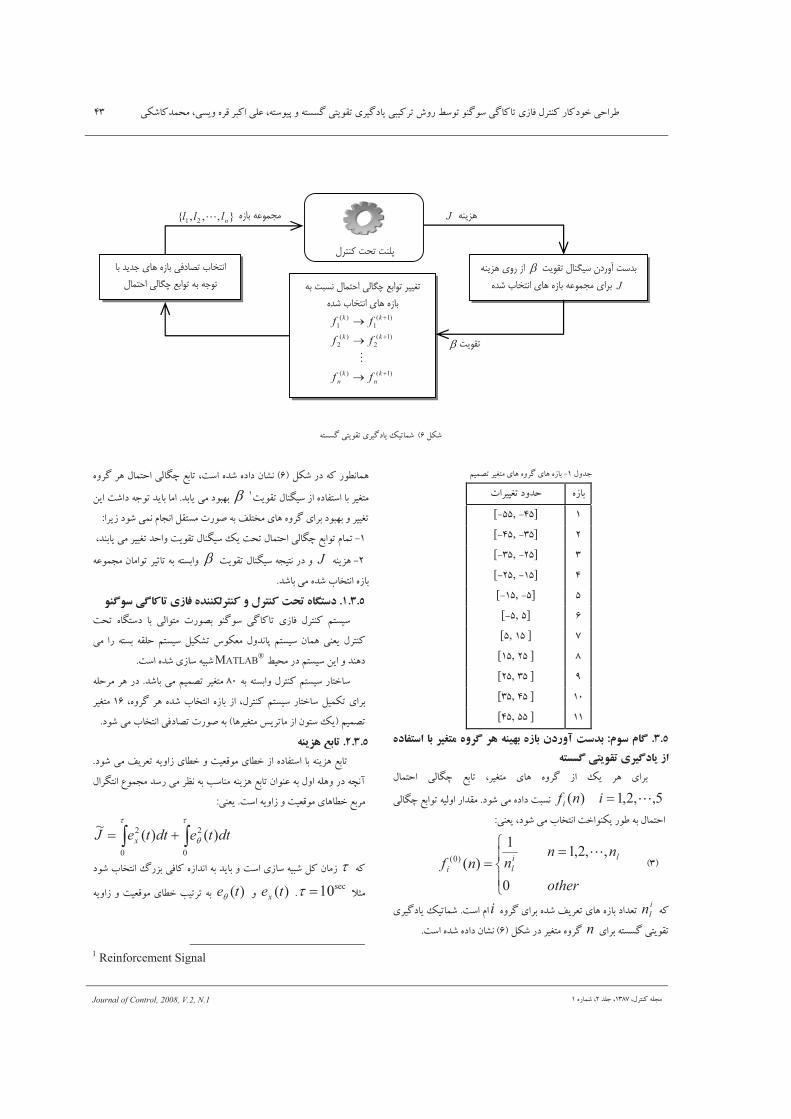
��.��� , ��EE� ��(�C$ '�����( �����$ 9,� /.�$ ����. �����$ ':�5 ����� �����0 �6��R ��������=� ��E(, ��S ���� �& 43
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
\��6 ($���� �(�����' �C$(�� ��EE�
�,� 1- �� �:��' �� �,��' x����%$ ��F �:�� x$ �,�6��#�� 1 ]45-,55-[2 ]35-,45-[3 ]25-,35-[4 ]15-,25-[5 ]5-,15-[6 ]5,5-[7 ] 15,5[8 ] 25,15[
9 ] 35,25[
10 ] 45,35[
11 ]55,45[
3.5 .a�� a�� :�� �6�� ,!2-# ��%��g�� �-�� �� �� �!�i��� �� � 6�)�!���( �9�)�� ��JJ�
���' ��(�� �,�� :� �' x���!�L* h��$ ��� ����6�5,,2,1)( �infi � ���� W�EN� ��� .!,� ���C��!�L* h���$ ��
��R �� ����6�(� v�V�N� W0����� ����(�P�:
)3( 6"
6!
other
nnnnf li
li
0
,,2,11)()0( �
��iln �� �:�� ���P$' �P$(��� ��� _' �,��iW.� a� .$���� �(�����'
�C$(�� ��� ��EE�' n x�� �,��� \�� �� �)6 (W.� ��� ���� +�<N.
\�� �� �� ��DN���)6 (��$ �W.� ��� ���� +�<N!�L* h� �,�� �� ����6�x���. :� ���X�.� �� ���C$ ���L(W1 - � ���;�� (��� .�� ���(� W��� � �$ �( Jx$����� ���;� , �' �� �,��' �N a�N� \C�E� #��@ �� _�V�� : ���(��: 1- !�L* h���$ a��$� W=$ ����6�(. ���C$ ���L(x$ �6�, W��� �� (����� 2- I�( ��J �N �� ,�. ���C$ ���L( W- O�$ �� ��E��,� �&��� +����$ �
� ��� v�V�N� �:��� ����. 1.3.5 .6�� �%�"�� - ��� �D� ��Q��!( ����� ���� .�:�5 ����� F�E' ����$� !���� #��%� ����.� W=$ ��L�.� ������� (�P� . +�����<$ B��P� �,�N�� F�E�. \�� �� ��E� �C6 F�E�
� , ����(. J�=� �� F�E� /MATLAB® ���:�. �' W.� ���. . ���0�.� �� ��E��, ����� F�E80 x����%$ ��� F� ���� . �6�� �� ��
���' ��$�. ���0�. \� ��,�� �� ��� v�V�N� �:�� :� ������ F�E16 x��� ��%$� F)(��. ��$�� :� +(x�� G���� (5��%$ #��@ ��� � v�V�N�� ���.
2.3.5 .I� K���)� I� h��$(�D0 :� ���X�.� �� ��' PS����D0 , W' ,�:(�P$ �(� _� ��� .
I� h��$ +���& �� �,� ��, �� �gN"(� �4N �� >.��� ��� ���L�N� j��� �.����D0 h���' PS���,�: , W(W.� � .(�P�:
33 �<
:
<
0
2
0
2 )()(~ dttedtteJ x
��< �� \� +��:�:�. �' �� , W.�(5�� �:��N� �� �� ��� v�V�N� ��I� i��sec10< .)(tex ,)(te: $�$ ����D0 >' PS���,�: , W( �
1 Reinforcement Signal
����� �� ���
�� ��� ����� ���� ���� �� ������� !�"��� #�$ �%��
)1()(
)1(2
)(2
)1(1
)(1
�
�
�
=
=
=
kn
kn
kk
kk
ff
ffff
�
�&���'�( �����& )*+,- - ��'.$ #,+ %� J ��� !�"��� #�$ �%�� �/� 01 #���
��'.$J
�'�(-
�� �'�2 #�$ �%�� �3*�4 !�"����� ��� ����� ���� �� �2�
�%�� �/� 01},,,{ 21 nlll �
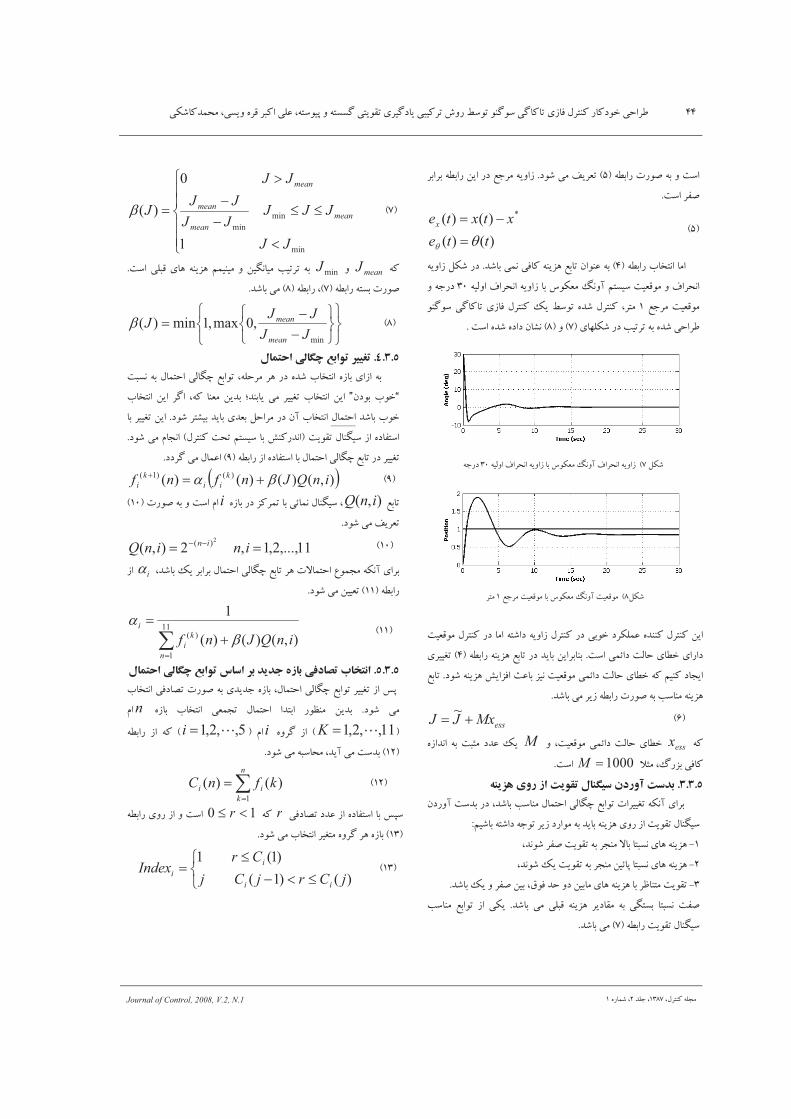
44 ��.��� , ��EE� ��(�C$ '�����( �����$ 9,� /.�$ ����. �����$ ':�5 ����� �����0 �6��R ��������=� ��E(, ��S ���� �&
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
�D��� #��@ �� , W.�)5 (�P$(� _� ��� .,�:(� �� h �� �( ����� �D��� JW.� �X@.
)5( )()()()( *
ttextxtex
:: �
�D��� v�V�N� ���)4 (I� h��$ +���& ��(5�� ��� �N� ���� .,�: \�� ��( �PS�� , ���=N��. W�,�: �� B��P� uN," F�E(!,� ���=N� �� �30 , � ��
PS��� h �� W1 /.�$ ��� ����� ����(:�5 ����� �' ����$� ����.6��R� $�$ �� �����;�� �� >' )7 ( ,)8 ( W.� ��� ���� +�<N.
\��7 (,�:(,�: �� B��P� uN," ���=N� �(!,� ���=N� �� �30 � ��
\��8 (PS���PS�� �� B��P� uN," W�h �� W1��� �(��0 ����& ����� ����� J� ,�: ����� ��(PS�� ����� �� ��� ����� �� W
����' �D0' W!�6�]��� W.� .������(�� J(I� h��$ �� �( �D��� ��)4 (x$���' �(�� ����D0 �� F' �]�� W!�6� PS���N W��I5� d&�� I(I� �(��� �� . h��$
I�(: �D��� #��@ �� >.��� ��(� �� ����. )6(
essMxJJ �~
��essx �D0' �]�� W!�6� PS��� , �WM ( �:��N� �� W��� ��& �5��� i�� ���I�1000M W.�.
3.3.5 .� ,!2-# ��%���9� ��Q)-2 6� �( I�)� ���' x$ ��N"��!�L* h���$ #��� +��," W.�� �� ����� >.��� ����6�
.��C$ ���L(,� :� W' I�(�� ��(: ����� �� �(��� ����� � �$ ��F: 1- I�(� ���' �C$ �� ��� )�� ���EN(��N�� �X@ W 2- I�(�� ��' ]�� ���EN��C$ �� ��� J( W(��N�� �3- �C$(I� �� ������ W(�� ��' ����� �l�5 �6 ,� J� , �X@ J(���� �.
L�E� ���EN WX@� ��C� ��(I� �(�S ��� �� ���� .(�� >.��� h���$ :�.��C$ ���L( �D��� W)7 (�� ����.
)7(
66"
66!
#
>>��
$
min
minmin
1
0
)(
JJ
JJJJJ
JJJJ
J meanmean
mean
mean
-
��meanJ ,minJ $�$ ���� >�LN��� , J���I� F�(�� ��' �S� W.� . �D��� ��E� #��@)7( �D��� �)8 (�� ����.
)8( ?@A
"!
?@A
"!
��
min
,0max,1min)(JJ
JJJmean
mean-
4.3.5 .g���"�Q+ K���� �� ����4� �:� ��' $ ��6�� �� �� ��� v�V�N� �:��!�L* h���� W�EN �� ����6�
“+��� v�0 ”�(x$ v�V�N� J��� �� (�� �����(� ��� ��� ��P� J( v�V�N� J ���� v�0����6� �P� \6��� �� +" v�V�N�' ��(� ����� ��< .�(x$ J�� �� �. :� ���X�.���C$ ���L( W). �� �����N������� W=$ F�E (� a�N�� ��� .
x$��!�L* h��$ �� �� ����6� �D��� :� ���X�.� ��)9 (� ���&�� ����. )9( � �),()()()( )()1( inQJnfnf k
iik
i -% �� h��$),( inQ. ��]��N ���L� �:�� �� I���$ ��i #��@ �� , W.� a�)10 (�P$(� _� ���. )10( 11,...,2,1,2),(
2)( �� ininQ in ���' !�L* h��$ �� #)���6� j��� ��N"� ��6� ����� ��( ����� �i% :�
�D���)11 (P$��� J� ���.
)11(
� 11
1
)( ),()()(
1
n
ki
i
inQJnf -%
5.3.5 .�!�&� j�k�<�� %L �6��)"�Q+ K���� O��� �� %� ����4� x$ :� G���!�L* h���$ �� � �:�� �����6�(�' 5��%$ #��@ ��� v�V�N��� ��� .��($ ����6� ����� ��4�� JP�� �:�� v�V�N�n a�)11,,2,1 �K ( �,�� :�i a�)5,,2,1 �i ( �D��� :� ��)12 (� W.��� "(� ��.�=� ��� ���.
)12(
n
kii kfnC
1
)()(
5��%$ ��& :� ���X�.� �� G-.� r ��10 #> r ,� :� , W.�' �D���)13 (x�� �,�� �� �:���� v�V�N� �� ���.
)13( "!
>#�>
)()1(
)1(1jCrjCj
CrIndex
ii
ii
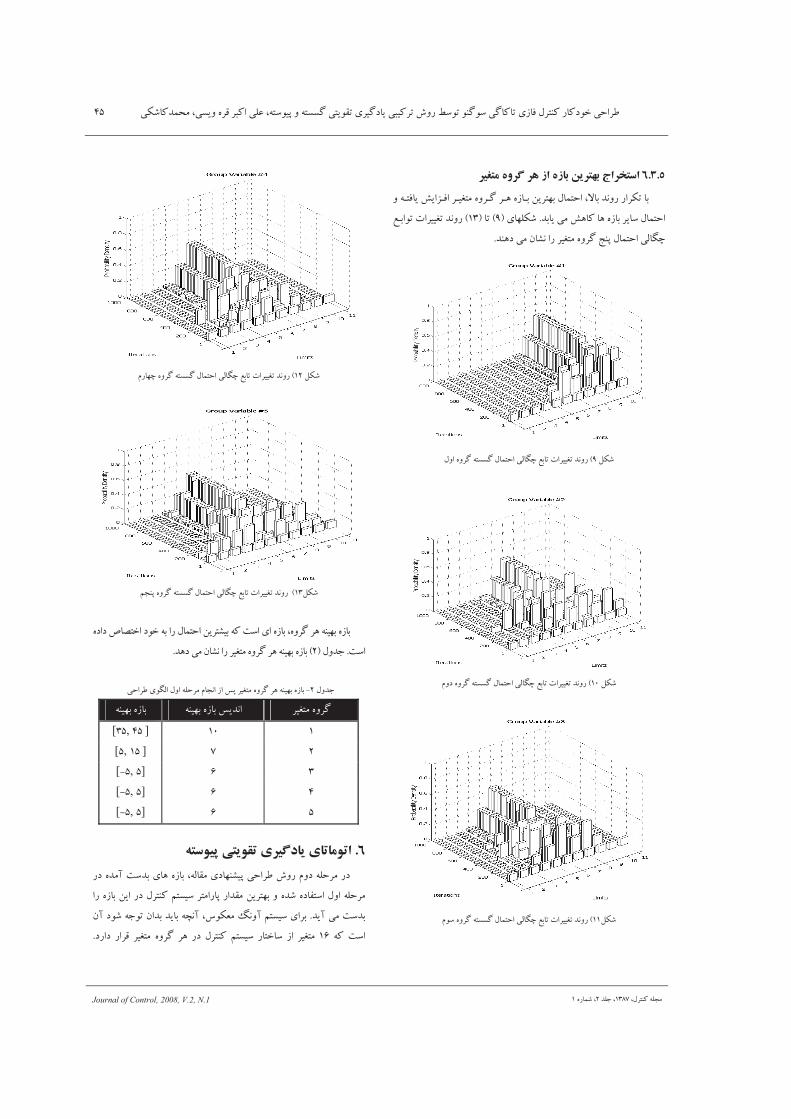
��.��� , ��EE� ��(�C$ '�����( �����$ 9,� /.�$ ����. �����$ ':�5 ����� �����0 �6��R ��������=� ��E(, ��S ���� �& 45
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
6.3.5 ���� l��k���)g�� �-�� �� 6� �6�� Y�� ��;� ����6� �)�� �N,� ����$ ��( x�� �,�o� �o� �:�o� J o� �Io5� �( �( , �o�5�
�. ����6�(� ���� �� �:�� �� (��� .�;��' )9 ( �$)13 (x$ �N,��� ho���$ #��!�L*� x�� �,�� b�� ����6��� +�<N �� �� ����.
\��9 (x$ �N,���!�L* h��$ #��� �,� �,�� ��EE� ����6�
\��10 (x$ �N,���!�L* h��$ #��� a,� �,�� ��EE� ����6�
\��11 (x$ �N,���!�L* h��$ #��� a�. �,�� ��EE� ����6�
\��12 (x$ �N,���!�L* h��$ #��� a��;* �,�� ��EE� ����6�
\��13 (x$ �N,���!�L* h��$ #��� F�� �,�� ��EE� ����6�
;� �:���� �:�� ��,�� �� ��' � �� W.����<( ���� z�%�0� ��0 �� �� ����6� JW.� . �,� )2 (;� �:���x�� �,�� �� ���� +�<N �� �� ���.
�,� 2- ;� �:���x�� �,�� �� ����L!� �,� �6�� a�N� :� G� �' 6��R�
x�� �,���� �N�(;� �:�� G��� ;� �:����� 1 10 ] 45,35[ 2 7 ] 15,5[ 3 6 ]5,5-[ 4 6 ]5,5-[ 5 6 ]5,5-[
6 .�������( )�!���( �9�)�� ������ 6��R 9,� a,� �6�� ��� ����;�<' �� �:�� ��!�C�' .�� �� ���" W��;� , ��� ���X�.� �,� �6��(. ������� ���C� J�� �� ����� F�E( �� �:�� J
� W.��� "(� .���' .��� �gN" �B��P� uN," F�E( +" ��� � �$ +��� � �� W.�16 x���. ���0�. :� ��x�� �,�� �� �� ����� F�E����� ���S � .
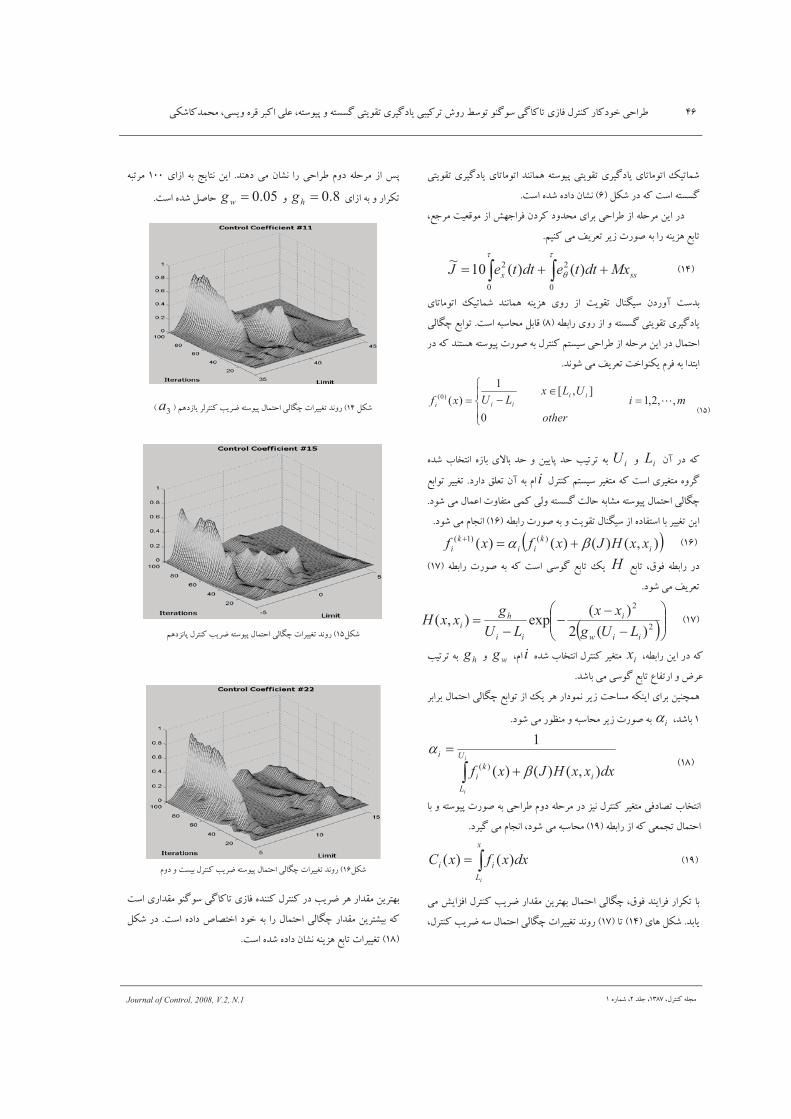
46 ��.��� , ��EE� ��(�C$ '�����( �����$ 9,� /.�$ ����. �����$ ':�5 ����� �����0 �6��R ��������=� ��E(, ��S ���� �&
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
$�����$���$� �' (�����' �C$(�� �� ��N��� ��.��$���$�' (�����' �C$(�� \�� �� �� W.� ��EE�)6 (W.� ��� ���� +�<N.
� ��(6��R :� �6�� J� ���' PS�� :� �; ��5 +��� �,�=�� �h �� WI� h��$(: #��@ �� �� ��(�P$ �(� _� ���F.
)14( ssx MxdttedtteJ �� 33<
:
<
0
2
0
2 )()(10~
. +��," W.����C$ ���L(,� :� W' I�(�� $��� ��N�����$���$� �' (�����' �C$(�� ,� :� , ��EE�' �D���)8 (W.� ��.�=� \��S .!�L* h���$�
� �� ����6�(6��R :� �6�� J� .�� #��@ �� ����� F�E� �� �� ���E� ��.� a�5 �� �����(�P$ W0����(� _� �N�� .
)15( mi
other
ULxLUxf ii
iii ,,2,10
],[1)()0( �
6"
6!
&�
+" �� ��iL ,iU $�$ ����� �6 >�()�� �6 , J' ��� v�V�N� �:��
x�� �,����' x�� �� W.��. �� ����� F�Ei���� ?P$ +" �� a� .x$�� h���$ �!�L*� � ����6��!, ��EE� W!�6 ���<� ��.�� ��� � ���&� #,�X��� ��� .
�(x$ J��. :� ���X�.� �� ���C$ ���L(� #��@ �� , W �D��)16 (� a�N�� ���. )16( � �),()()()( )()1(
ik
iik
i xxHJxfxf -% ��
h��$ �l�5 �D��� ��H (.�� h��$ �� �D��� #��@ �� �� W.�)17 (�P$(� _� ���.
)17( � �����
���
��
��
� 2
2
)(2)(exp),(
iiw
i
ii
hi LUg
xxLU
gxxH
� �� ��( ��D��� Jix x��� ��� v�V�N� ����� �i �a�wg ,hg $�$ ��� >.�� h��$ j�X$�� , {�&� �� ����.
�g������ J' �(: W6�E� ���( �� �����N �(!�L* h���$ :� �� ����� ����6�1 �����i% : #��@ ��(� ��4�� , ��.�=� �� ���.
)18( 3 �
i
i
U
Li
ki
i
dxxxHJxf ),()()(
1
)( -%
5��%$ v�V�N�� x���N ����� ��6��R a,� �6�� �� I� � #��@ ��� �� , ��.�P�$ ����6�� �D��� :� ��)19 (� ��.�=�� � a�N� ����� ����.
)19( 3x
Lii
i
dxxfxC )()(
��5 ����$ ��(!�L* �l�5 ��� ��;� ����6�(�| ���C� J(�I5� ����� >(� �� (��� .�� \��' )14 ( �$)17 (x$ �N,���!�L* #��� �| �. ����6�( ������ >
6��R a,� �6�� :� G�� � +�<N ��� ���� .�(��N J(�:� �� b' 100 ��$���:� �� , ����$' 8.0hg ,05.0wg W.� ��� \@�6.
\��14 (x$ �N,���!�L* #��� � ����6���| ��.�( �!���� >( F��:�)3a(
\��15 (x$ �N,���!�L* #��� � ����6���| ��.�(F��IN�� ����� >
\��16 (x$ �N,���!�L* #��� � ����6���| ��.�(� ����� >� a,� , WE
��;�(�| �� ���C� J(:�5 ����� ����� �� >' ����$� ���C� ����.' W.� � �����<(!�L* ���C� J� � �� ����6�W.� ���� z�%�0� ��0 � . \�� ��
)18 (x$��I� h��$ #��(W.� ��� ���� +�<N �� .
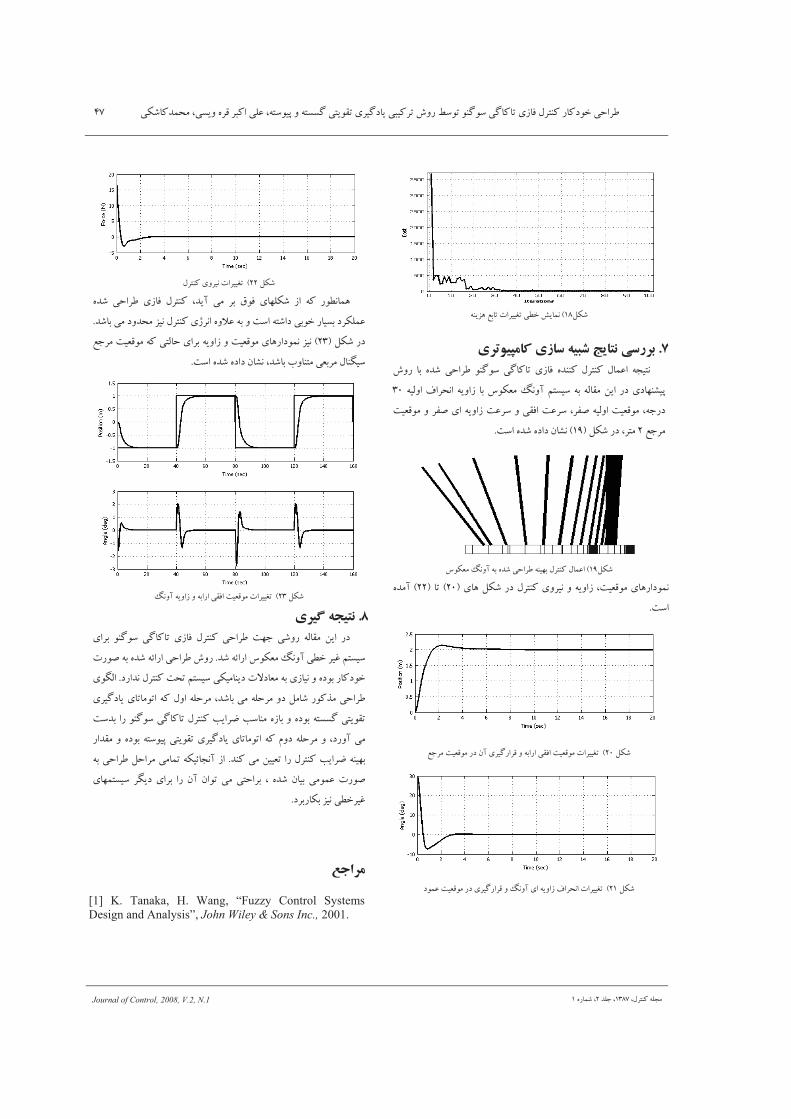
��.��� , ��EE� ��(�C$ '�����( �����$ 9,� /.�$ ����. �����$ ':�5 ����� �����0 �6��R ��������=� ��E(, ��S ���� �& 47
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
\��18 (��N(D0 �� x$��I� h��$ #��(��
7 .�2��� ��<)�� X�6�� �( .������( �N�:�5 ����� ����� ���&� �' ����$� 6��R ����.� 9,� �� ���
����;�<' � ��(. �� �!�C� J�: �� B��P� uN," F�E,�(!,� ���=N� �� �30 PS�� �� ���!,� W�C5� W&�. ��X@ �� ,�: W&�. ,(� �' PS�� , �X@� W
h ��2 \�� �� ����)19 (W.� ��� ���� +�<N.
\��19 (;� ����� ���&��6��R ��� B��P� uN," �� ����������N' PS���,�: �W(N , ��,�' �� \�� �� �����' )20 ( �$)22 ( ���"
W.�.
� \�20 (x$��PS�� #���C5� W� ����S , �������' PS�� �� +"�h �� W
\��21 (x$��,�: ���=N� #��(� �' ����S , uN,"��' PS�� ������& W
\��22 (x$��N #���,�' ������;�� :� �� ��DN���' � �� l�5� "(:�5 ����� ��' 6��R� ���
E� ����&���0 ��� & �� , W.� �����^�N� �,i' N ������� �,�=� I� ���� . \�� ��)23 (N��������N I' PS���,�: , W(��� �' �!�6� PS�� ��� h �� W
.�P��� ���L� W.� ��� ���� +�<N ����� v,����.
\��23 (x$��PS�� #���C5� W� ,�: , �����(uN," �
8 .�<�� � ��( � ��(�,� �!�C� J� 6��R W; � :�5 �����' �$���� ��� ����.'
.�K F�E�D0 �� �� �]��� B��P� uN," .6��R 9,�� #��@ �� ��� �]���N , ���� �����0�:�' � #)��P� ��(������ .�����N ����� W=$ F�E .�L!�'
6��R� � �6�� ,� \��� ���n���$���$� �� �,� �6�� �����' (�����' �C$(�� ��| >.��� �:�� , ���� ��EE�( ����� >����$� W.�� �� ����.
�� �$���$� �� a,� �6�� , ���,"' (�����' �C$(�� �� ���C� , ���� ��.�;����| ��(P$ �� ����� >��� J� ��� .]�N" :�����$ ��� 6��R \6���� ��
���& #��@� ���6��� � ��� +�� �� ��� �� +" +��$' �(. �L��;��E' K�D0�� N�������� I .
KL���
[1] K. Tanaka, H. Wang, “Fuzzy Control Systems Design and Analysis”, John Wiley & Sons Inc., 2001.

48 ��.��� , ��EE� ��(�C$ '�����( �����$ 9,� /.�$ ����. �����$ ':�5 ����� �����0 �6��R ��������=� ��E(, ��S ���� �&
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
[2] K. Tanaka, M. Sugeno, “Stability analysis and Design of Fuzzy Control Systems”, Fuzzy sets and systems, vol. 45, pp. 135-156, 1992.
[3] G. Ren, Z. Hung-Xiu, “Analytical Design of Takagi-Sugeno Fuzzy Control Systems”, American Control Conference, pp. 1733-1738, 2005.
[4] M. Akar, Ü. Özgüner, “Decentralized Parallel Distributed Compensator Design for Takagi-Sugeno Fuzzy Systems”, Proceeding of 38th Conference on Decision & Control, pp. 4834-4839, 1999. [5] A. Jadbabaie, M. Jamshidi, A. Titlie, “Guaranteed-Cost Design of Continuous-Time Takagi-Sugeno Fuzzy Controllers via Linear Matrix Inequalities”, IEEE, pp.268-273, 1998.
[6] K. Tanaka, T. Hori, H. Wang, “New Robust and Optimal Designs for Takagi-Sugeno Fuzzy Control Systems”, International Conference on Control Application, pp. 415-420, 1999. [7] M.Y. Shieh, C.W. Huang, T.H. Li, “A GA-based Sugeno-Type Logic Controller for Cart-Pole System”, IEEE, pp. 1028-1032. [8] M.N. Howell, M.C. Best, “On-line PID tuning for engine idle-speed control using continuous action reinforcement learning automata”, Control Engineering Practice 8 147-154, Elsevier Science Ltd., 2000.
[9] M.N. Howell, T.J. Gordon, “Continuous action reinforcement learning automata and their application to adaptive digital filter design”, Engineering Applications of Artificial Intelligence 14 549–56, Elsevier Science Ltd., 2001.
��� �� � 1387� �2����� �1 �=X@ �55-49
Journal of Control, 2008, � Iranian Society of Instrument & Control Engineers http://www.isice.ir ������ ��1387S� ��I�� , ����� +�.��;� J�N� ��+��(� ?
�L)��� ���kC� ��L ��2�J� ��' m� ]
�� ,�E0 ��� ��=�'1�X@ ���N �' ���2��� ��N J����0��3
1 ��L<N���P�@� ��$ ��;.(I� 2 ��L<N��,(EN��E� J- ���(��" \(��� 3 � I���� C=$�$����XN� #�C� �EN��5 ����� , �)INRIA ( [email protected] � [email protected] � 3 [email protected]
_____________________________________________________________________________ �%��+: ��(� �!�E� �!�C� J(� ��� �� F�E�. �� >�& U�V<$ W; ����E�. ���;�' D0� +��: �� �(n��N ���x$)LTI ( ����
.���� ���L�� ���S .���(,� �� ��(� ��' �;��& �(� ' n��N����"(|�(� _�@�$ �� ��� �� �N�<�� _(�P$ �� 5�X�� �!�E� :���(� � �;��<�K� ��w6 �� >�& U�V<$ W; ����E�. ���;�' ^�N� ��' �w5 �� �,�=�' 2L�� ����0 . ���X�.� �� ��.�� J(� ��
��(��L!� :�� ��;��(: v�� +����� ��5�( ���0�.:�. ���;� �!�E� �' ��," W.�� �� l�5 .��& ���� �( �� ��$�0 ��' 9,� ��������<�� ���� +�<N �!�C� J(� �� ��� �(���.
�^�, '��� '�� :>�& U�V<$� ��(� � �� �!��P� � ����E�.' $��(��
Abstract: The problem of optimal sensor location for fault detection in Linear Time-Invariant (LTI) systems is considered. A novel characterization of undetectable faults is shown to give rise to a new optimal sensor location problem for fault detection in the presence of
2L disturbances. An algorithm is presented whereby suboptimal solutions to this problem can be determined. A numerical example is presented to illustrate the theory andexecution of the algorithm.
Keywords: Fault Detection, Sensor Location, Algebraic Riccati Equation (ARE)
____________________________________________________________________________
1 .��%9�
�;!�. ��' �P.�$ , /E� ����� '�� F�E�. +�� �$ ���g�� �� ��0� +��L<�,`� � �$ +�N�� �� �|�(� '�;!�� �� ����� >�& U�V<$ '�;�,�
W.� ��5�� ���S]1 [ ,]2 .[\�� ?��D� +��L<�,`� ���& ���1 ',� ��,� �(��� �� a�.�� '���5 �6��R W; ��"��� '�;���N�� �!�� I�����
W.� ��� . �( B�.� �� �� ���5 J(��L�(,� �N�� �� W.� �`(, ���0�. �� '�,�, �� �� �� #�&iR� :� ���X�.� �� �$ ��� �� �6��R '�u � ,�0 ,
y 9�<�K� ��w6 �� ,w �� a�.�� �!��L�.��N�� ���L�.B �$ �(��N ��!�$ '�;��& j�S, ���� �� hS��� ��N�� ���L�. 9:���� �� +����f '�I � ��
?(�R J(� :� �$ ���N '��� F��%$ ����E�. , �;��=� ��4N ��("�5 _�V� ',� �� �;N" v�V� ���� , v�D��N #���O�$ ���� W; ��.��� #���;�$
��� ��5�� ���� ��("�5 ����& .�$�$ J(�� U�V<$ '�;�,� r��<� � , > �!�� ���5 ����0� �� _�V� '����E�. �� W.� �$�&iR� 9:���� �� >�&
���� �� ���S ��N�� . ��.��� '�;=� �� ����E�. J(� �gN��* W.� �;(��
, �$ ��� ��. >�& hS�� �� U�V<$ W; �;N" #�&iR� ����� ��� >%N��� ����0 �$�O�� .�;!�. �� ��=! J(�� ����: �� ��,`� ���� �� ��0� '
�� ����E�. ���;� ���(� �!�E� ��� �� ����� >�& U�V<$ '�;�,� �(��� ����� +�.��;� , +�6��R � �$ I�N �� F�E�. ����& �� ?�S� #��4N ���
W.� ��V�LN��� �� . �� ����� +���P�]3 [ �$]5 [ J��V$ ����(� :� �!�E� J(��� F�E�. '�;�!�6 >.���W.� ��5�� ���S �.��� �� . ��]6 [ '�� F�E�.
W.� ��� v�V�N� l�5 �!�E� ��R ��E� +���P� �D0��K . ��]7 [ �( :��� #��4N ���&� W; ����E�. ���(� �!�E� :� '���" ����(� ���0�.
(, �(��C� W.� ��� ���X�.� ���x�� ��* F�E�. �( �` . ��]8 [��(� �!�E�� �� ����E�. ���X@ +���N ���(�� �!�E� �� �.��� ����(� �(' F�E�. ��C�N�
��' W.� ��� ���� s��$�� ���x�� ��* . �� a�N��. ,]9 [���(,� B�.���' ����� �;=� J��P$ '��� ��,� W�.�E6 �(�4N ��' F�E�. �( �� >.���
��� �(��� >�& U�V<$ W; ����E�. +������S W; ��E� �C6 ������W..
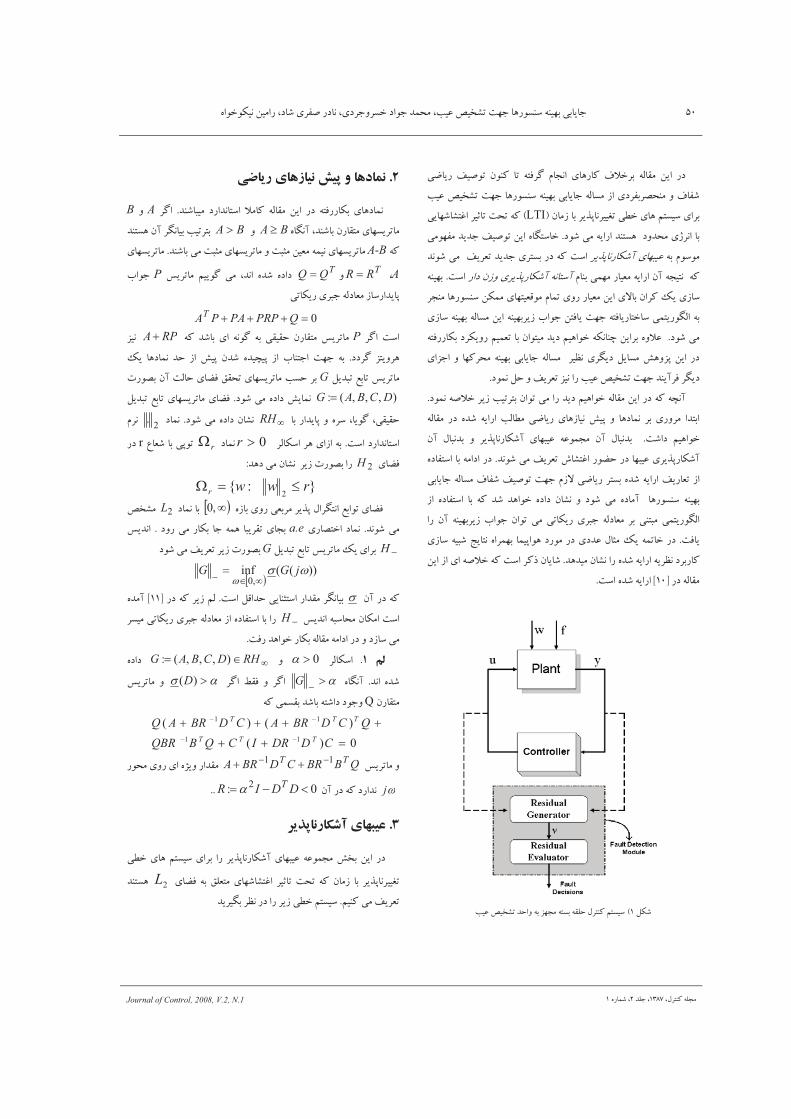
50 ���0���N J���� ���� '�X@ ���N �'�� ,�E0 ��� ��=� �>�& U�V<$ W; ����E�. ���;� ���(�
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
�|�(� _�@�$ +��� �$ ��5�� a�N� '����� �i0�� �!�C� J(� �� >�& U�V<$ W; ����E�. ���;� ���(� �!�E� :� '��X��%=�� , ��X�
+��: �� �(n��N���x$ �D0 '�� F�E�. '���)LTI( (�;��<�K� ��O�$ W=$ ��� ^�N� ��' ��� �� �(��� ���E� �,�=� .;X� �(� _�@�$ J(� ��L�.�0 ���
�� a�.�� �(n��N����" '�;��& �N�� �� _(�P$ �(� '��E� �� �� W.� a��� ��;� ���P� �(��� +" ���N ����� +:, '�(n�����" �N��." W.� . ���;�
��� ����E�. J��� '�;��PS�� a��$ ',� ���P� J(� ')�� +��� �( ':�.� ���;��(: v�� J�5�( W; ��5�(���0�. ���(��L!� �� ':�. ���;� �!�E� J(
��� �� . ��5����� ���(,� F��P$ �� +����� �(� F����0 ��N��* J(��� �,i& '�I � , �;��=� ���;� ���(� �!�E� ��4N '�L(� \(�E� ��,I� J(� ��
���N \6 , _(�P$ I�N �� >�& U�V<$ W; ��("�5 �L(�. >�$��� +��$ �� �� �(� F����0 �!�C� J(� �� �� �gN" ���N �@i0 �(: .
�!�C� �� ��� �(��� >!�D� �|�(� '��:��N ��� , �����N �� '�,�� �����W��� F����0 . +" ���N�� , �(n��N����" '�;��& �&��� +" ���N��
� _(�P$ 9�<�K� ��w6 �� �;��& '�(n�����"� �N�� . ���X�.� �� ����� ��|�(� ��E� ��� �(��� _(��P$ :�� @�$ W; a:) ���(� �!�E� ��X� _�
� ����" ����E�. ���;�� :� ���X�.� �� �� �� ����0 ���� +�<N , ���� �$��(� '�� �!��P� �� ����� ���(��L!�� �� +" ���;��(: v�� +��$
W5�( . ':�. ���� b(��N ����;� ������� ���� �� '��& ���� �( ��$�0 ������� +�<N �� ��� �(��� �(�4N ������ . J(� :� '� �@i0 �� W.� ��m +�(��
�� �!�C�]10 [W.� ��� �(���.
\�� 1(.�V<$ �6�, �� I;� ��E� �C6 ����� F�E�& U� >
2 .� - ��!��<�< ����6�( 2)e��
�����N' ������� ����N��.� i��� �!�C� J(� �� ��5����� . ���A ,B �;E(�$��' ��LN" ������ +��C��BA 7 ,BA $ ���E� +" �LN��� >�$���
��A-B �;E(�$��' �;E(�$�� , W��� J�P� ���N' � W���� ����� .�;E(�$��' A� TRR ,TQQ � ��N� ��� ����� G(�$�� F�(��P v��
�� �!��P� :�.���(��' $��(�� 0��� QPRPPAPAT
��� W.�P C�C6 +��C�� G(�$��� � �N�� ��' �� ����RPA� I�N���� I�(,�� . �( �����N �6 :� ��� +�� ���g�� :� v��� � W; ��
\(��$ h��$ G(�$��G �;E(�$�� >E6 ��' �w5 ?C=$' #��%� +" W!�6),,,(: DCBAG � ���� �(��N� ��� .�w5' $���;E(�' \(��$ h��$
C�C6� �� ���(�� , ��. ��(�� �8RH � ���� +�<N� ��� . ���N2. a�NW.� ����N��.� .�:� ��' �!��.� ��0$r ���NrC ��$� j�P� ��r ��
�w5' 2H �%� ��� +�<N �(: #�� ���: }:{
2rwwr >C
�w5' P��� �(n� ���L�N� h���$� ,�' �:��� �8,0 ���N ��2L UV<��� �N�� .��%�0� ���N' a.e ��' � ���� � ��� ��(�C$� �,� . G(�N��H ���' \(��$ h��$ G(�$�� �( G � _(�P$ �(: #��%�� ���
� �))((inf
,0+D
+jGG
8&�
+" �� ��D (����.� ���C� �LN���� W.� \S��6 . �� �� �(: F!]11 [ ���" G(�N� ��.�=� +���� W.��H �E�� �$��(� '�� �!��P� :� ���X�.� �� ��
0 ���� �!�C� ����� �� , �:�. ��W5� ���� . N"1 . �!��.�0$% ,8& RHDCBAG ),,,(: ����
��� �N� . ��LN"%$�G ��� /C5 , ���%D $)(D G(�$�� , +��C��Q �EC� ���� ����� �� ,� ��
0)()()(
11
11
��
������
��
CDDRICQBQBRQCDBRACDBRAQ
TTT
TTT
�$�� ,( GQBBRCDBRA TT 11 �� �� � �`(, ���C�' ,�' ��=�+j +" �� �� ����N0: 2 #� DDIR T%..
3 .'����( n��<2���#)�
�;��& �&��� �V� J(� ��' ��� �� �(n��N����"' �� F�E�.' D0� �;��<�K� ��O�$ W=$ �� +��: �� �(n��N���x$' �w5 �� ?P��' 2L ���E�
P$� _(�� F���. D0 F�E�.� �(��L� �4N �� �� �(:

���0���N J���� ���� '�X@ ���N �'�� ,�E0 ��� ��=� �>�& U�V<$ W; ����E�. ���;� ���(� 51
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
fDwDuDxCyfBwBuBAxx
321
321.
������
: )1(
�� �� +"nRx& �F�E�. W!�6 �����mRu& �,�,' ��0��� �����
� ���lRw&�,�,' � ��0����N 9�<�K�qRf & �;��&' !���6�� ���I � �� �( , ��E�. �r�=�' , ��("�5pRy& ,�0� ��� �:��N�' � >�& U�V<$ W; ���� ����� .���N:C � +�<N� G(�$�� �� ���
��� �:��N�' ����� �� �� ����E�. W�PS�� ��: L�E� W.� ��� ���� +�<N� ���� .� {�5 ��(� �� �� W.� ��m \��S� �� ���: �( �� ?P��
���<5 �&���sR&E&: �� ���� .�;E(�$��' W��OA iB ,iC �N��� >.��� ��P�� .
�� ��� �(��� b(��N F�E�. �� W.� J(� aI�E� ��,`� J(�)1 (�;|�5' �,�=�' �N�(: ��<� �� �:�. ���,"�� �� :
)I (�$��(G:C �:� ��' a��$sR&E&: W.� ��.���.
)II( k,:),( 2BA,�' ��=�+j�:� �� �( , W.� �(n� �����' R&F+G(�$��� �2BAIj �+ �D. ��$�' ���� \��� .
)III( �:� ��' E&F: k,:),( AC: W.� �(n�����" . )IV( G(�$��2D �D. ��$�' ���� \��� . )V( )dim()dim( fqyp 7 .
W.� � �$ \��S {�5 ��)I ( '��� ���;� v�� �( �� , J��w$ W; W.� '�,�| ����E�. W�PS�� .�;|�5' )II (�$)IV( s���� d6��� ��
J�!�� ���5 ��]12 [���E� ����N��.� .{�5)V (� J��w$� �:��N� �� ����;(���' 5��� �N��� �� , >�& U�V<$ W; ��(��5 :�.
���<1. !�E� �!�C� J(� �� �*������;� ���(� � ����E�. ��5�� �4N �� , �;��=� ���;� ���(� ��4N '�L(� ':�. ���;� \(�E� +��$ �� ��� W.� ��� ��4�� J(� '��� �� ���N _(�P$ >�& U�V<$ W; I�N �� F�E�. '�I �
'�;E(�$�� W.� �5��A ,1B ,1D F�E�. �� ��)1 (,������� �� ��E��: ���N ���&� �$����x$ �� �� �!�C� J(� �� ��� �(��� 9,� , W5�� �4N ��.
� ��6� ,�0 +��$� F�E�.)1 ( +��� �(: #��%� GN���5 �:�6 �� �����N
fGwGuGy 321 �� )2( �:� �� +" �� ��' 3,2,1i F(���
iii DBAsICG �� �1)(: �;��& _(�P$ W; ��(�' �w5 �� �(n��N����"' 2L �D���)2 ( ��
� �4N �� _�V� W�P|, ,� W=$� F(��� .�:� �� �����' 0f �D���)2 (
W�P|,>�& +,�� F�E�. � _�@�$ ��� ,�0 �� ���� �(: #��%� +" W.�
1211 wGuGy � +" �� ��11 C&w .�:� �� ��6' 0Gf �w5 ��' 2L �D���)2 (
W�P|,>�& �� F�E�. � _�@�$ ��� ��� fGwGuGy 32212 ��
+" �� ��12 C&w .� ��(�� $�;��& +��' �w5 �� �� �(n��N����"' 2L ���N _(�P$ �(: #��%�.
T)�`�1 . >�&f �w5 �� �(n��N����" >�& ��' 2L ���' F�E�.)2 (�:� �� ��� ��(��' 121 , C&ww F���� �����21 yy . ��D�
����P� f �&�w5 �� �(n��N����" >'2L �(: �&��� �� ?P�� ��� W.�����
}..,:{ 2322 C&H& weafGwGLfD �&��� _(�P$D P��R ��D�� �;� ���.� � ��(� ��� ��� : J(����I�
>�&f �&��� ��D � ��� a��� �N��� �(n��N�����"�N��$ �W.� W; (�LV.��� ���P� F;� ���. J(� ��' �� a�.���(n�����" �N��."' ��� +:,
�&��� ��D � _(�P$� F��� . T)�`�2 . ��(��N {�5W \(��$ h��$ G(�$��qq� �w5 ��'
8RH ��LN" �����
2* sup Wf
Df&I:4
�(n�����" �N��."' �&��� �� ��� +:,D W.� . N:, G(�$�� �� , �� W.� ��m \��S� W _(�P$ ��2 �� +���� J(�
� �E��� �w5 �� �(n��N����" >�& J(����I� ��.�=� �$ �:�.' 2L �( ��EN���5 �:��� ��(n� a�N� ���V!� .�,� �(: F!� )�� +��� ��.�=� W; '
*:4 � �(���� ��� .
N"2 . ���� {�52G �X@' ,�' ��=�+j ���� �����N ,� �(I$' #��%�NMG 1
2� ���� ����� +" �� ��N F� h��$ �(-
0��� ,M ��0 h��$ �(� �E��� .N:, G(�$�� J��g��� W ��8RH � �N�� ��' �� ��� v�V�N�01
3 G�
�WMG . ��LN":: 44 >* +" �� ��
��
1
3
2
WMG:4
)3(
$��o� . ��wS ?��D�35-13 ��]12 [(�N" :� �� ��N F� h��$ �(- 0��� �n! W.�
112 88
�8 NNMMMG

52 ���0���N J���� ���� '�X@ ���N �'�� ,�E0 ��� ��=� �>�& U�V<$ W; ����E�. ���;� ���(�
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
���� {�5Df & �:� �� ��LN"' 2C&w F(��� fMGwMG 32
W��� F����0 �n!2322 fMGwMG F(��� ,
2222222 >>> 8� wMGwMGwMG
J(��� �,i& 2
21
321
3 >> ��
� WfWMGWfWMG � ���N� �� ���
��
>1
32
2
WMGWf
J(������
:: 44 >
��& 1
32
* 2supWMG
WfDf
� ���<2 . �� ��0 h��$ �� ��� +�<N +��$� M ��*
:4 �w5 ?C=$' �!�6� ���� �(: #��%�]12.[
)(
)(
5.0
.
yxCV
LyxLCAx
��
��J
�
JJ
:
:
B
+" �� ��122 )( �� VPCDBL TT
: ,TDDV 22 �,iP��;|�5 ?�R' )II( �$ )IV( ������02 $V ,07 TPP v��
�� �!��P� ��X��%=�� :�.���(��' $��(��
0)(
)()(
221
221
122
122
��
������
��
TTl
T
TTT
BDVDIBPCVPC
CVDBAPPCVDBA
::
::
�� ���� .�w5 ?C=$ J(� �� W.� J(� �� >!� ���N' �( ���0�. W!�6���� ��N�� �!��� �� �� �L�(,� �� +" �� �� ��B W; ��N�� ���L�.
W.� >�& j�S, U�V<$]3.[�(n�����" :� �C�S� _(�P$ �$ W.� ����" I�* ��� ��(�' �� >�&
�;��<�K� ��w6' 2L �� a�.�� ���(n�����"' >�& a,�C� �(��� W.� F�(��N]10.[
T)�`�3 . >�&f �(n�����" ��� W.� a,�C�f �&��� �� ?P��}:{ 22 :4$& WfLfD ����.
�� ��(��DN���]10 [ _(�P$ ���P� l�5 _(�P$ W.� ��� ���� +�<N �(��� >�& U�V<$ #)�C� �� �;��& '�(n�����" '��� �� W.� '�L(�
W.� ��� . |�(� _�@�$ l�5 _(�P$ :� ���X�.� �� ���(" �V� ��� 5�X�� �E� :� �!
��(� � F�(��N �� �(��� ����E�. ���;�.
4 .�L �"�J�)��� ��� ��2�J� �
_(�P$ ?��D�3 (����� ���� ��N�� �!�� �(� W; �� �L�(,� ��� ���� >�& U�V<$� (�;��PS�� �� ����E�. +��� ���S �� �,�� ��:4
���( �� ���;� ��� �� \S��6 .WC�C6 �� J��*���(,�' �&���D :��;��&' �� a,�C� �(n�����" � 9��E�� ��� .�S �I�LN� j�|�� J(�' W;
�(� _(�P$' ��(� �!�E� :�� � v�E=� ����E�. ���;�� ��� . �"�J�1. F�E�.)1 (�(��L� �4N �� �� . �����E&: � �N�� �� ��'
�� ������:4 � �L(� #���P� �( , ��� \S��6
)4 ( �
�E& 13
2infWMG:
� ��(� ��6��� ��(�� �!�E� �� ���1 �(: ':�. ���;� �!�E� �� ���P� W.�.
�"�J�2. F�E�.)1 (�(��L� �4N �� �� . �����E&: � �N�� �� ��' �� �� ����
)5 ( �E&
::
Gsup
+" �� ��13
� WMGG:. �!�E� �� �� W.� ��m +�(��2 8&RHMG3 ��(::LCA�
� , W.� I�(,��� �� ��� +�<N +��$3MG �w5 ?C=$' �!�6� �%� #����� �(:
),,,(: 35.05.0
333 DVCVLDBLCAMG ���� :: �:� �� �n!' N:, G(�$�� �(� >.���8&RHW F(���
E&F># 8� ::: ,0 GG \�� �� � �$ ��2 , �!�E�2 �!� ���P$� ���� . \�� ?��D�2 �!�E�
��(� � :�.�����6 �!I��� ����E�. ���;�' ��C�N� G(�$�� ��;� J(����:G ,�' �&���E W.� . \�� J(� ��WfG:B 0 ��<�K���K �X!���
��N�� ���L�.B � v�E=�� ���.
\�� 2(.�!�$ W; ��N�� �!�� F�E�K �X!�� ����<�K��� .���N�� ���L
F! :� ���X�.� �� ��61 ��(��L!�� �0�. v�� ��.�=� W; ��5�(�� �!�E� ���;��(:2 � �(���� F��� .
N�)2�Q"�I : �� ����' ),,,,( 3232 DDBBA �N� ��� ���� .��(��N �� � >�$��� �� �(: \6��� :

���0���N J���� ���� '�X@ ���N �'�� ,�E0 ��� ��=� �>�& U�V<$ W; ����E�. ���;� ���(� 53
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
��4��1 : �����E&: �=N �� ��' k,: �� ��(��N v�V�N�),( AC: �� �(n�����"�� .
��4��2 : N:, G(�$��� W ��R ��' �$�� �� ��(��N v�V�N�( h��$ G��$( \1
3� WMGG: �w5 ��' 8RH �w5 ?C=$' �!�6� #��%�
),,,(: :::::JJJJ
DCBAG G(�$�� , ���� �����:JD ��$� I�N
N��.� ���� ����� \��� . �4�� �3 : ,� ����$ :� ���X�.� ��' �!��.�0$% �:� ��'E&0:
���C� �����6% � �N�� �� ��' �� ������%: $�0
G . ���C� J(�%
��*% ������ . ��4��4 : � �� �&��E �����1: �=�� ��' �� ��(��N v�V�N�
01 :: G \6��� ���� ,2 ,3 ���� ����$ ��. ��4��5 : v�D� ���C�: ���C� J(��<�� �� ������*% v�V�N� ��
��(��N . ��6��� l�5 F�(��L!� ����I5� a�N /.�$' ��&' ��4N �� �� ����N��.�
Scilab ]13 [ �(Matlab :�. ����� \��S' W.� . '� �N��N '�P� �V� ����� �� ���� +�<N ��& ���� �( ',� l�5 F�(��L!� ������ :� .
5 .)!%' ��p� �(
E� ��,`� J(� �� ���" W.�� b(��N ������ +��� +�<N W; ��o(� �!�� �o������ �( �� >�& U�V<$ W; �;�. v���' ��o�AFT/F-16 ��
�� ��]8 [ \�� ?��D� W.� ��� _�@�$3 � �4N ��� F(���
\�� 3(PS���V<$ W; ��. v��� W�& U� �� >(���� �� ��� ��AFT/F-16
D0 ���� ������� ���' AFT/F-16 :�,�� /(��� �( ��' ��N� �� j�X$��h=3000 ft ��� ��& ,M=0.6 W.� ��� ���� �(: #��%�
wxcc
y
fw
xx
��
���
���
�
���
��
���
�
�
���
�
��
���
�
�
���
�
�
����
�
�
���
�
�
��
1000001000
101)()(0
05.01100
001000001000001
3411.199335.00232.4386939.00010
1312
.
::
+" �� ��
::::
223.4361.27)(,86939.0137.0)(
13
12
��
cc
,]63878.0,15758.0[�E&: #�5 >E6�� b�. v��� W�PS��)ft( W.� . ��(� ��f �;��&' !���6�� �� F�E�. ��' , ��)�� ���=N�
� +�<N �� ������� �-;�� ��� .@� ���� W�PS�� J��P$: U�V<$ W; >�& j�S, hS���f W.� . G(�$�� W W.� ��� v�V�N� �(: #��%�.
Is
sW1.0
1.0)(�
/�=� �� ���N�� �( :� ���X�.� ��Scilab F�(��L!� �I ����� \�S �V�
:�.' , ���*% W�PS�� >E6��: \�� ��4 W.� ��� F.� .� +�<N \�� J(� ��(��DN���� ���:4 W�PS�� �� ��(�C$2.0* :
�n! , W.� ��� �����62.0: �.��� v�V�N� �N������ ���' +������S���� �;�. v��� .�;�� ��' 6 �$9 ��N�� ���L�.2B U�V<$ W;
�:� �� >�&' _�V� �(��C�: �N� ��� ���� +�<N . W�P|, �;�� J(� ��N�� ���L�.2B �:� �� ��' N�;��N >�& �( j�S,� ����� ��of 12 \�� ?��D�5 � +�<N ������� �-;� F�E�. ��� ��� . J(� �� ��(��DN���
:�. ���� b(��N' � ��(�� ��N�� ���L�. W�.�E6 ��<2B �� W�EN>�&2f�S,� 2.0* = :: � �(�I5�� ���( .
6 .� ��< (���
��(� �!�E� �!�C� J(� ��� F�E�. �� >�& U�V<$ W; ����E�. ���;���' �x$ +��: �� �(n��N��)LTI (.��� ����� W5�� ���S .�;��& �����'
���P� �(��� �� �(n��N����"' �(n�����" �N��." �� a�.��' _(�P$ ��� +:,X(�P$ +" :� ���X�.� �� , �N��� ���' �;��&' �(��� �(��� a,�C� �(n�����" .
�(� �!�E� ����� ��' ��(� W; � �K� ��w6 �� ����E�. ���;��;��<' 2L ��(��L!� ����;�� �(��� �(��� +" v�� ��.�=� W; ��5�(���0�. .

54 ���0���N J���� ���� '�X@ ���N �'�� ,�E0 ��� ��=� �>�& U�V<$ W; ����E�. ���;� ���(�
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
\6 , _(�P$ W; +��$ �� �� �!�C� J(� �� ��� �(��� ���(,� J(��� �,i& F�E�. �L(� '�I � �( , �;��=� ���;� ���(� �!�E� ��4N '�L(� F;� \(�E�
��� ���� >�& U�V<$ W; .|�� �!��N� �N��$ �� �� '�L(� F;� j� �( �� )�@� �� W.� F;� ���. J(� �� �.�� ���� �|�6 ��,`� �P��R �N��." ���P� ',� '��O�$ �* ����� ����� ��E� �C6 ����� F�E�.
��� +:, '�(n�����"*:4 �� ����E�. ���(� ��� ��L(� #���P� �( , �����
� ���� '� �N�� >�& U�V<$ ���;� W; �*:4 j�|�� J(� ���� \S��6
�W��� ����0 ��E� �C6 ����� F�E�. ����& ',� '��O�$ �*
(2�IQ��.� ������S ?�R ���E(�N J�!,� ��� ��,`� J(� ��' ����<�940/30 /.�$
<�,`� WN,�P�� I(� ���N�� ,' �P�@ ��L<N��� W(��6 I(��$ ��;.!��� ,$�I�;$� W.� ���.
L���K[1] Y. Chen and R. J. Patton, Robust Model-Based Fault Diagnosis for Dynamic Systems, Kluwer Academic Publishers, London, Prentice Hall, 1999. [2] R. J. Patton, P. Frank, and R. Clark, Issues of Fault Diagnosis for Dynamic Systems, Springer Verlag, London, 2000.
[3] K. Raman, “Optimization of measurement Schedules and Sensor Designs for Linear Dynamic Systems”, IEEE Transaction on Automatic Control, Vol. AC-21, No. 1, pp. 55-64, Feb. 1976.
[4] M. Morari and O’Dowd, “Optimal Sensor Position in the Presence of Nonstationary Noise, “Automatica,Vol. 16, No.5, pp. 463-480, 1980.
[5] A. Arbel, “Sensor placement in Optimal Filtering and Smoothing Problems,” IEEE Transaction on Automatic Control, Vol. AC-27, No. 1, pp. 94-98, Feb. 1982.
[6] K. Watanabe, M. Sasaki, and D. M. Himmelblau, “Determination of Optimal Measuring Site for Fault detection of Nonlinear Systems,” Int. Journal System Science, Vol. 16, pp. 1345-1367, Nov. 1985.
[7] M. Basseville, A. Benveniste, G. V. Moustakides and A. Rougee, “Optimal Sensor Location for Detecting Changes in Dynamical Behavior,” IEEE Transaction on Automatic Control, Vol. AC-32, No. 12, pp. 1067-1075, Dec. 1987.
[8] D. Kim and Y. Kim, “Optimal Sensor Location for Robust Fault Detection Filter,” IMechE, Vol. 213 pp. 13-21, 1999.
[9] Y. Xu and J. Jiang, “Optimal Sensor Location in Closed-Loop Control Systems for Fault Detection and Isolation," in Proceeding of the American Control Conference, Chicago, Illinois, pp. 1195-1199, June 2000. [10] M. J. Khosrowjerdi, N. Safari-Shad and R. Nikoukhah, “Optimal Sensor Location for Robust Fault Detection," in Proceeding of European Control Conference (ECC), Kos, Greece, July, 2007.
[11] L. Jian, L. W. Jian, and Y. Guang-Hong, “An LMI Approach to Minimum Sensitivity Analysis with Application to Fault Detection,” Automatica, vol. 41, pp. 1995-2004, 2005.
[12] K. Zhou, J. C. Doyle and K. Glover, Robust and Optimal control, Prentice-Hall: Englewood Cliffs, NJ,1996.
[13] S. L. Compbell and R. Nikoukhah, Modelling and Simulation in Scilab/Scicos, Springer, 2005.
\�� 4( F.�*% >E6 ��:
\�� 5( r�=� >�&2f
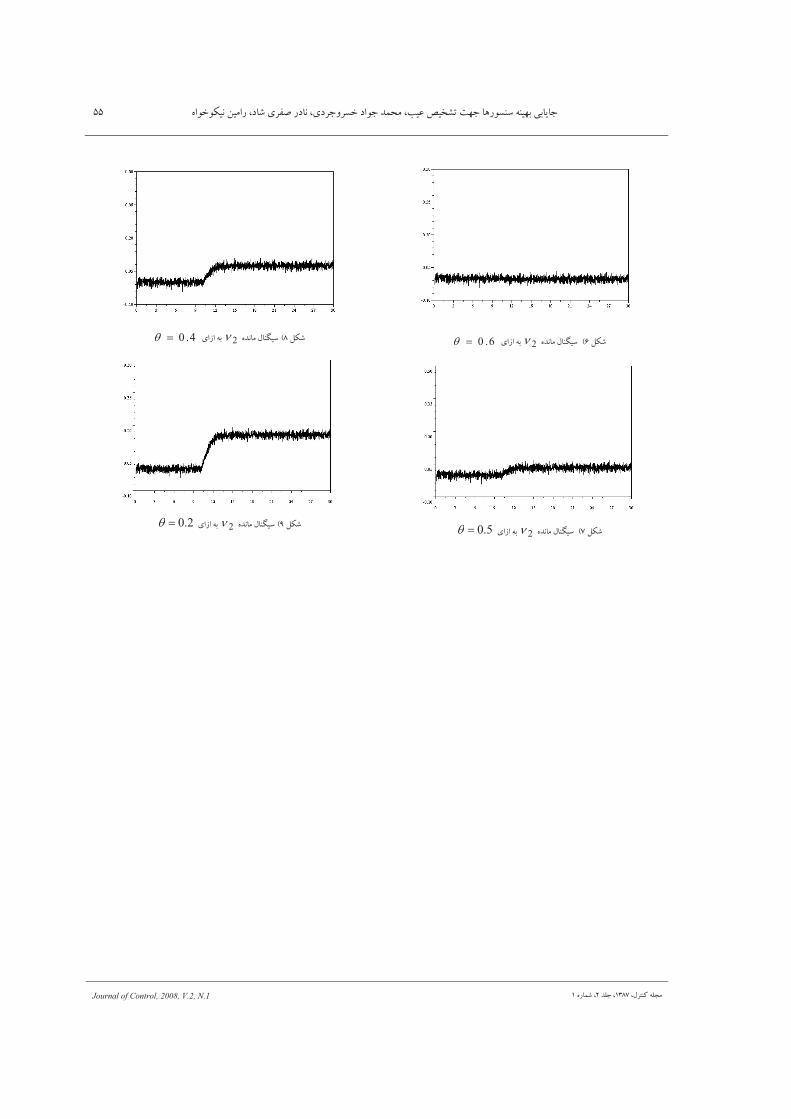
���0���N J���� ���� '�X@ ���N �'�� ,�E0 ��� ��=� �>�& U�V<$ W; ����E�. ���;� ���(� 55
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
\�� 6( ��N�� ���L�.2B �:� ��' 6.0:
\�� 7( ��N�� ���L�.2B �:� ��' 5.0:
\�� 8( ��N�� ���L�.2B �:� ��' 4.0:
\�� 9(.� ��N�� ���L2B �:� ��' 2.0:
��� �� � 1387 � �2 ����� �1 �=X@ �64-56
Journal of Control, 2008, � Iranian Society of Instrument & Control Engineers http://www.isice.ir ������ ��1387S� ��I�� , ����� +�.��;� J�N� ��+��(� ?
I<�" q,�J�� ����# N�J�� �9��M� ���- �" - Y+
����<5 ��� WC�C6 :��(�51�(�D& ��=� �2
���5 l�� ���� �.������ \�%=�!�- +�;X@� ��L<N�� #��S1+�;X@� ��L<N�� ��N,���!� �,�� ��(���.� �2 [email protected] 2 � [email protected] 1
____________________________________________________________________________
�%��+: IN�! Z+�E�� ����" F�E�. ����� '��� �C��D$ �L!���� �( �!�C� J(� ��- �!- J*�� �]��� ���� . :� �����$ ���4�� J(� ����;� �� �D0 '�;����5 �� ���S ���X�.� ���� �C��D$ �D0��K ����5 , �C��D$ , W��O '�� ���� . W!�6 ����5 v�V�N� ���.�� J(� ��
�� #��@ _N����! F�C�E� 9,� :� ���X�.� �� �D0��K IN�! Z+�E�� J�P��N F�E�. ��N�� '���(�� , ����- !�- �DCN �( �� J*�� J��w$ F! �( >!�S �� �+" ���P$ s�CN ����& ����* :� �5��%$ ���� . F�E�. �� �D0 ����5 '�;!��L�. +�,I5� �� ������ ��
�� \@�6 ����n� ����* :� ���V!� �DCN �� �� �(�;N ��� ����� F�E�. ��N�� '���(�� �WEVN �6�� �� ��� ����� ���� . #��O�>D� J(� �� #��@ _N����! F�C�E���K 9,� :� ���X�.� �� I�N ���� . �� '��;�<�� �L!���� >.��� ����& +��� +�<N '��� +�(�� ��
IN�! Z+�E�� ����" F�E�. ':�.���(��- �!- �D(��� �� ��6 �_�V� /(��� �� �F�E�. �� �L!���� J(� ���&� ':�. ���� b(��N �J* ���P$ �DCN , F�E�. j�N ���� ���x$ a��$ ��D� v�D� �� �]��� ����� ����.
�^�, '��� '�� :IN�! Z+�E�� ����" F�E�. ��C��D$ �����- �!- _N����! '���(�� '���$ �J*
Abstract: In this paper an adaptive controller for the Unified chaotic system is presented. For this purpose, a combination of linear feedbacks with constant and adaptive gains and a non-linear adaptive state feedback is used. In this way, the Lyapunov’s direct method is used to select the suitable non-linear state feedback. Moreover, the asymptotic stability guarantee of the uncertain Unified chaotic system in a stochastic point on the general manifold of its equilibrium points is proved in a lemma by using non-linear feedback controller. Then, the asymptotic stability of the final controlled system in any desired point on the mentioned manifold is guaranteed by adding the linear feedback signals to the prior controlled system. This subject is proved, by using the Lyapunov’s indirect method. Finally, the simulation results related to applying the controller to the Unified chaotic system, in different cases, even when simultaneous-changing of the system type and the desired equilibrium point occurs are provided to show the well-acceptable performance of the proposed controller.
Keywords: Adaptive Control, Unified Chaotic System, Lyapunov’s Stability Theory.
_____________________________________________________________________________
1 .��%9�
��� ��* �� a�& _�V� '�� �0�� �� +" j�S, �.��� , v��" ��(��W.� ��5�� ���S �P!�D� ���� ����E� ��D� ��0� . ����o� :� �o0�� �� �:,�o��
�(����ooo� '�ooo���I�!�$�� ��ooo��& �� ���ooo�" �ooo� �ooo(�=$ �ooo�N��]1 [ , #����V� �� ����" +��.),�� J��]2[�� ��(�� J(� � ��o� hoS�, ��X� �N��$ .
!,� �� v��" �P!�D� ������ >K� �� ���5� \�=$ W; '��I�� +���P� �N��$�0�� �� �;��E�. :� '���E� �� ��� ���� �D0��K ��N�� a�& :� �X�V� '��
#��oS ��N,���!�]3[ ��o�I� �o.��;� �]4[ ��(^�o!��� '�;��oE�. �]5 [ ,� '�;<���, �(����]6 [�,� ���� . UVo<� qi��� v��" ����� a,I! J(������
9,� �]��� :� G� �B�.� J(� �� , ��(���OGY #� /o.�$1 ���o��� �2 ,r��(3 ���o�" '�;��oE�. ��o��� ����: ��]7[ �o�� ,� �� v�o�" ��o��� �
W.� ��5�� ���S J�CC=� � �$ ���� ����E� ��D� ���0� . '�;��oE�. :� ��( �N�L��o�" ��o�5� '�o;��`(, �(��N �� +" >.��� W���S >�. �� �� ����"
1 Ott2 Grebogi3 Yorke

IN�! Z+�E�� ����" F�E�. �C��D$ �����- �!- J* /�(�D& ��=� �����<5 ��� WC�C6 :��(�5 57
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
��o�5�� ���oS +�,��o5 ?�C=$ , �P!�D� ���� ��0� ��. ��* �� ���o�" F�oE�. IN�! Z+�E��- �!- W.� J*]8- 14 .[ �o� +�o<N ��0� #�P!�D� �o��x$ �o� �o��
:� �o@�0 '�o;��`(, :,�o� >o �� ����n� F�E�. '��������� '���� \�� �o� F�oE�. J(� �� �N�L���" '�����5� ���o�]8- 10 .[ �o� J�0���o� J(����o��
o�������� �� #��o��x$ �o( ���P��oN ��o , �o� F�oE�. Jo(� ��o��� d=�� +" '�W.� ���n , ��X� j�|�� .
�v�o�" ��o��� �o���: �� ��o� �<��� #)�C� :� '���E� �� +��o� a�oP� k��V�oo.� '��oo� �oo.�.� {�oo5 �oo( �F�ooE�. ��oo� '�oo�������� ?oo�S� ���ooC�
W�C5�� �o� �L!���� I��" �o���]8 �15 ,16 .[ �o( a�o�$ �oPS�, /(��o� �� �o�����N �F�E�. ��� '��������� :� �0�� +"�� �,i& , ���E� �PDS ��K �( , ��0�
�� �o��� �o��x$ �N�;��N ��D� �( , �L�E�" �� ��N��$ . �o( k��V�o.� J(����o�� ��0��o��N '�o�������� �� , �� ����" '�;��E�. ����� '��� �C��D$ �L!���� J�oCC=� :� �o0�� �o �$ ���� +����$ , ���� W���� I]�6 ���E� �PDS ��K �(
��5�� ���S W.�]11- 14 .[ �� �4N�� �!�C� J(� �� �� �gN" '��o� �oC��D$ �oL!���� �o( �o]��� �����
IN�! Z+�E�� ����" F�E�. ��N�� ':�.���(��- �!- ���oV!� �oDCN �� �� J*W.� F�E�. W!�6 '����x�� '�w5 �� z�0 ����* �( :� . :� �� ��o��* Jo(�
�� F�E�. ���P$ s�CN ����& ����* �P� �� J(� F���N . �� �4N���� F�E�. ����� �o� �oD0 ���o�5 '�;!��L�o. , �oC��D$ �oD0��K ����5 >���$ :� ���X�.�
��;� �� #��@ �C��D$ , W��O '�� ��(n� . '���� '��;�<�� �L!���� ��(��D� F�oE�. '�o�������� �� �o��x$ , ���P��oN �� W�EN �(n� ?��D$ , a,�C� ����&
W.� . F�E�. ��� ������ �� �o!���� '�o;(�,�, v�oV�N� ��o=N , �oP!�D� Wo=$
�oo� �oo5�P� a,� �ooV� �� �F�ooE�. ��oo� . �oo6��R :� ��oo� �a�oo. �ooV� ���oo� ���� ��oo� �ooL!���� ��oo� . �ooL!���� �oo6��R \oo6��� a��oo;* �ooV� ��
�� ���o� ��o��� F�E�. '���(�� J��w$ �� s���� d6��� , ��D� '��;�<���� ��;N" #��O� ����� �� F! ,� >!�S�� �]� ���� . ���o� b(�o�N �F�o� �oV� ��
�]��� �P!�D� W=$ F�E�. ',� �� _�V� �(��:" ��* a�N� �� s���� ':�.�� �� #��@ F<� �V� �� '��� ���N , '��� h� , ��� ����.
2 . (��)!-2- j�k�<� - �`"�M� �D� N�J�� �%� �"��
��. ��1963IN�! �1 ��.i� ����" ���(��� J�!,� ��o�N _<� ��]17 .[J* F�E�. �+" :� G� �;!�.2 ��. ��1999 �o�(, , J* /.�$]18 [ F�oE�. ,
�oo!3 ��oo. ��2002 Joo* , �oo! /oo.�$]19 [ '���� ,� �oo� �oo� �oo(��� �oo5�P�
1 Lorenz2 Chen3 L�
���(��� �oN��� IN�! F�E�. �� W�EN #,�X�� '^�!���$ �� ��� ���<� ����" '�� . ��. �� �N�����.� , �! �q��(�;N2002 �� �V� >(��| �� '���S J�5�� �4N��
'��� �� '�6�, a�5 �N�� ?5�� ���n!� l�5 F�E�. �. W!�6 #)��P� �D0 ���� ��;�<�� F�E�. �. J(� #)��P�]20 .[ W=$ ���� >���$ ����" F�E�.
IN�! Z+�E�� F�E�. +���&- �!- �� �5�P� �(: �D��� �� , J* ���.
66"
66!
��
������
zxyz
yxzxyxyx
38
)129()3528())(1025(
%%%
%
�
��
)1(
�. '�:� �� �l�5 ����" F�E]1,0[&% Wo.� ����" ���5� '���� . Jo(���S, F�E�.)8.0,0[&% �� �����N IN�! ����& F�E�. ����� ��o� . �o�S,
8.0% �ooo� �ooo! ���ooo�& F�oooE�. �ooo� \(�ooo�$ ��ooo��� �ooo�S, , ���ooo�]1,8.0(&% �� ��N��0 �J* ����& F�E�. ���� ��� .
�(� '��������� _(�P$ ��a �b �c ,d�(: /��,� �� ?��D� �:
66
"
66
!
�
���
38
1293528
1025
%%
%%
dcba
)2(
�� IN�! Z+�E�� ����" F�E�. W!�6 #)��P� +��$- �!- #��o%� �� J* #)��P�)3 (���N �E(�N:�� .
6"
6!
���
�
dzxyzcyxzbxy
xyax
��� )(
)3(
. :� '���E� �� #)�oP� :� ���X�o.� �o� �o;N" �����o�(� ���5� �� �(�;��E�IN�! Z+�E�� F�E�.- �!- �� _�@�$ J* ������� ����b /��,� �� ��� ���� �
)2 ( ,)3 ( Wo.� ��oD� ��o��� \o��S ������o� �( +���P� . ��o�5� ���o�� +��o�P� _�@�$ IN�! #)��P� �� ��(���� W5��� ��(�� j�S, a�L�;� #)��. ����"
�� ���]15 ,16 .[ ������� ���� J(� ��b ��o& �� ������ �� �)�� �� ��� ��m�(��4 �! F�E�. ���. a�5 ���� IN �o� ��o� ��o�&� #���o6 �o� >.���� �����
��� ����0 ���. �N��=$ ���N . :� �o�( �'��;�<�� �L!���� �6��R �� ,��(� :� ������� �� �!���� '�;!��L�.b �� ��,I5� ��� . �o$ �� �(�;�,� >K� �� ?��D�
IN�! Z+�E�� F�E�. ����� '��� +���- �!- +�N�oS �Wo.� ��o� ��;�o<�� �Jo*����� �� ��o� ho� F�oE�. '�;�!�6 ?�<� �� �N��$ . ���L�o. ��o!�C� Jo(� ��
�o�x�� ?�o<� �o� �Wo.� W��O ��;� �� �D0 ����5 ���L�. �( �� a,� ����� W!�6x �� h� F�E�. ���.
4 Rayleigh
58 IN�! Z+�E�� ����" F�E�. �C��D$ �����- �!- �J*�(�D& ��=� �����<5 ��� WC�C6 :��(�5
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2����� � 1
3 . �Q"�� �4��_ 6� r%�
�o6��R :� ��o� W�oES Jo(� �� ��oP!�D� Wo=$ F�oE�. �o5�P� :� Go� �o� +�oo�� �oL!���� ���oo� .� �F�ooE�. ���ooP$ s�oCN J�oo�P$ Woo; ���o.�� Joo(� �
����x�� �N��: ?�<� WE�5��' �o� ��o� ���� ���oS �X@ �� ����� F�E�. W!�6 �oD��� :� a�. , �,� #)��P� �� � �$ �� #��%�(� ��)3 ( �o(: '�;(,�oE$ �o�
�� F�.�.
dxzyx
2, )4(
�D��� �� ',�E$ ,�)4 (P$ s�CN ����& ����* IoN�! Z+�oE�� F�oE�. ���- �o!- '�w5 �� �� J*3K �o� _�@�$ �o��� . �(��oC� +��o� UVo<� #��o@��
�D��� �� a,� �!��P� :� ���X�.� �� �F�E�. '��������� ?�S�)3 ( �o. ?�S� +���IN�! Z+�E�� F�E�. ���(���N ���P$ �DCN- �!- #��o%� ��o��* J(� �� hS�, �J*
UV<� �(: ���� ��.
� �� �� �6
"
6!
��������
)(,)(,)()(,)(,)(
0,0,0
3
2
1
cbcbdcbdEcbcbdcbdE
E )5(
IN�! Z+�E�� F�E�. �C��D$ ����� :� ��� ��!�C� J(� ��- �!- Wo.� +" �Jo* �oD��� �o� ��� ���� ����* :� ����V!� �DCN �� �� ��� ����� F�E�. ��)4( �
�DCN ��N�����
����
�
dXzXyXx
2,, ���V!� ���C� �� '�:� �� �X �
���� ���(�� ��N�� ��D�.
4 . �9��M� �Q"�� �4��_
'�o;(�,�, v�oV�N� z�o%0 �� a,� �oV� �� �� �$�=�|�$ �� � �$��IN�! Z+�E�� F�E�. �!����- �!- ��o��� F�E�. W!�6 #)��P� ��� ���� J*
�� �� ���n� ��� ���N �E(�N:�� �(: #��%� +��$.
6"
6!
����
��
dzxyzcyxzxuby
uxyax
���
)()(
2
1
)6(
�� �6��R '� �N�L� �� �!���� '�;!��L�. ������ �� q),� �o� F�o�� : �oDCN �o�
���o�& a�5 �� ���V!����
����
�
dXzXyXx
2,, ���oP$ �oDCN �o( �
�oD��� �o� ��o� ���� ��E� �C6 F�E�. '���)6 ( q�o�N�O , ��o� v�oE=� : s�o� "�o� ���no� ���oP$ �oDCN �� ��� ����� F�E�. ��N�� '���(�� J��w$ ���,
���� . �oD0��K ���o�5 ���L�. �( v�V�N� �� ��,� �6�� �� ��4�� J(� ���� F���5 �D(��� ��C��D$ �o!��P� �� �oD0��K �oV� �no6 J�| �� ���
�oN , �5��o%$ �oDCN �o( �� \o@�6 F�oE�. ���o� ����� F�E�. a,� W!�6 ���o� ��N�o� ���o(�� �)�o� �� ��o� �o�m ���o�& a�5 '���� ��� ����V!� . ��
��o� ��o��� F�E�. �� >.��� �D0 ����5 '�;!��L�. +�,I5� �� �a,� �6�� IoN�! Z+�oE�� F�E�. ����� :� �(�;N ��� �WEVN �6��- �o!- �� �o� Jo*
�� ?C=� ��� ���� ��� a�. �V� ��� . �oL!���� �6��R #��]I ������ ���� �]��� +" #��O� ����� �� F! ,� >!�S �� , a�� ,� �� ����.
N"1: IN�! Z+�E�� ��� ����� F�E�.- �!- �� +" W!�6 #)�P� �� �J* �D���)6 (�� �4N�� �� W.� ��� ���� F(��� . '�;!��L�. v�V�N� �� F�E�. J(�
�����u1 ,u2 �#��%�
"!
�
gzuu
2
1 0 )7(
������� +" �� ��g ��D��� �� ?��D�
xyxg � 2� )8(
:,� �� �� ���oP$ s�oCN ���o�& ��o��* �o� hoS�, �5��o%$ �oDCN �( �� ���� �D��� �� ��� ���� �F�E�.)4 (�� ���(�� ��N�� ��D� ����.
$��o�: �oD��� �o� ��o� ���� ��o��� +�N�oS ��)7( ���L�o. �� �,� �o� � �!����2u �o��� F�oE�. a,� Wo!�6 �o!��P� �D0��K �V� �n6 �X��, �
���� ��;&�� �� ��� . �!���� ������� ��� ,g���N ���C� � )(1 cbg �� ��o��� F�oE�. a,� , �,� �!��P$ '�;�!�6 ':�. Z+�E�� +���� ���� ����0� ��
�� F���5 ��� ���� . �o�(� �� �F�oE�. '�o�������� +��� J�P��N \�!�� J��!,?�S� ���C�1gW.� a�P��N � . ��o��� F�oE�. '�o���x�� :� ���X�o.� �o� +����
'�;���� ��P( ����� �gz,y,x, �o��� '�o���x�� �w ,g~ >o�$��� �� /��,� ��)9 ( ,)10 (�� _(�P$ F���.
xyw � )9(
ggg � 1~ )10 (
F(��� �� �4N �� �� �(: W!�6 #)��P� �� F�E�. G-..
"!
),,,(~),,,(
gzyxhgggzyxfw
��� )11(
�oD��� �o� ��o� _�o@�$ F�E�. '��� ,)11 ( �� �o(: _N�o���! h��o$ '��o(�N���� v�V�N� F�(��N.
� 22 ~21)~,( gwgwV � )12(
h��$ �N��: ?�<�V /��,� J�5�� �4N�� ��)6 ( �$)12 ( �o���0 �o(: #��%����.
2)()~,( wacgwV �� )13(

IN�! Z+�E�� ����" F�E�. �C��D$ �����- �!- J* /�(�D& ��=� �����<5 ��� WC�C6 :��(�5 59
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
�oooo� �oooo� �ooooD��� �oooo� �oooo �$)2 ( '�:� �oooo�]1,0[&% ����oooo�� �LM#MNN�M�M %(4a)-(c W.�.
�oDCN �L(�oE�� �� �o� W.� }|�, �J(������0w h��o$)~,( gwV h��$ , J�P� W���)~,( gwV� W.� J�P� �X�� . �o��� Wo!�6 ��x�� ��n!w
�oD��� �� ��� _�@�$ F�E�. ��)11 ( ��oL�� �Xo@ ���oC� �o� ��N�o� ��oD��� ��� . �oD��� �o� �o� ��� ����� F�E�. �� G�)6 ( �o� _�o@�$ �o� ����o�
/��,� �� ��� ���� ����� '�;!��L�. :� ���X�.�)7 ( ,)8( '�;�!�6 �x ,y �D� ,� �� F�E�. ��N�� �5��%$ ���C� �( �� ��N�� �Y �� ��L�� �N��.
/o��,� �o� ��� ���� ����� +�N�S ��N" {�5 �� +����)7 ( ,)8 ( �o4=! :� ���V!�t = t0 F�E�. ��)6 ( �gN��* , ��� ���&�t1 :� ����I� �5�� �6 ��t0
�o;�!�6 ��N�o� �(��L�� �� � �$ �� ����� v�V�N� 'x ,y �o( �o� F�oE�. ��N�� �5��%$ ���C�Y �D��� :� a�. ��EN��X(� �!��P� \6 �� �)6 ( �o� +��o$
�� �5��o%$ ���C� ���n� ��x�� ,� '� Y #��o%�(� �� ���o�N J(IL(�o �� W!�6 ��x�� '���z ��.� F����0 �(: �D��� �� F�E�..
)1()0()(2
dtdt ed
Yzetz �� �� )14(
�D��� �� � �$ ��)14 ( �� �N��:8=t �)(tz ��d
Y 2 �o� ��oL�� ��o� .
�� +�<N j�|�� J(� IN�! Z+�E�� ��� ����� F�E�. ����- �!- ��o�5� �� J* �D��� �� +" ������(�)6 (�� +��� �� ��o� ���� ����� +�N�S :� ���X�.� �� ����
/��,�)7 ( ,)8 ( �5��o%$ �DCN �����
����
�
dYzYyYx
2,, �o� hoS�,
� ��D� F�E�. ���P$ s�CN ����& ����*�� ���(�� ���N� ���� . N"2: IN�! Z+�E�� ��� ����� F�E�.- �!- �� +" W!�6 #)�P� �� �J*
�D���)6 (�� �4N�� �� W.� ��� ���� F(��� . '�;!��L�. v�V�N� �� F�E�. J(� �����u1 ,u2 �#��%�
"!
����
)()(
22
11
yXkgzuxXku )15(
��;� +" �� ��1k �C��D$ ������� , W.� W��� ���V!� ���C� �(g �� ?��D� �D���)8 ( ��;� ,2k ��D��� �� ?��D�
� � 0,)( 22 $� 44 yXXsignk� )16(
�oo� :,� �oo� ���ooV!� �ooDCN �� ���oo����
����
�
dXzXyXxE
2,,
�D��� �� ��� ���� �F�E�. ���P$ s�CN ����& ����* �� hS�,)4(D� � ��N�� ���� ���(�� ����.
$��o�: � #��O� :� �6�� J(� ��� '�o� ��o;� �o� ��o�N {�5 +��$1k ,2k �oD��� �� �oD0 ���o�5 '�o;��$ �� s���� �)15 ( ���oE� ����oO �(��oC� .
9,� :� ���X�o.� �o� �� ���no� '�o� ��;� '��� ���S \��S '�� ��,�=� G-.F��� �� J��P$ _N����! F�C�E���K . ��o6 ��� ����� F�E�. �(�� ��4�� J(� ��
'�oooooooow5 �� ��oooooooo0 ���ooooooooP$ �ooooooooDCN4K �ooooooooDCN �oooooooo�P(
���
����
��� )(,,,ˆ
2cbg
dXzXyXxED0 �� ��� . ��
D0 F�E�. �%V<� �!��P� , J�����^ G(�$�� �#��@ J(�� �oDCN ��6 ��� ���P$E /��,� �� ?��D� >�$���)17 ( ,)18 (��� ����0.
����
�
�
����
�
�
��
����
000
000
2
1
XXdXX
XXkccaka
J )17(
0}]))([(
)(){(2
12
21
221
3
������
������
XkXacXkcka
Xkckad
.
... )18(
�,� ���P� ����� ,- ���oP$ �DCN �� ��� ����� F�E�. '���(�� s�� �I�(,�� �oD��� �� ��o� ���� ��o�S +�o� ���,"�o� #��o@ �� �4N����)19 ( J��ow$
�� ����0.
6666
"
6666
!
�$
��$
$
�
�����
2ka
XacX)kck(a
)X(k
2
112
1
QcXk
QkacXk
0k
1
2
21
21
)19(
�D��� �� ���" W.�� '�;(,�E��N �� � �$ �� J(������)19( J��ow$ '��o� � ��4N���o� ���oP$ �DCN �� F�E�. '���(�� ��o;� �WoE�5��1k �o( �o� �o����
W��� #��@ �� , ��� ��5�� �4N�� ���V!� W��� ���C�)�X�� ( ���oC� +���
X ��oooo;� �2k :�?@A
"!
XQ
XQ 21 ,max �oooo���I�) :�
?@A
"!
XQ
XQ 21 ,min
���*�� (��� v�V�N� . �(��oC� �o� Jo(� �o� �o �$ �� ���1Q ,2Q J�P��oN � ��;� ?D� ��S W.� a:) ����E�2k ����o�� �o� ��� v�V�N� ��I� ��CN"
F���� ����� +����R� ��0� ��S +�� ���,"�� :� . ��o� ��o;� v�oV�N� ��� �o6 :� J�5� j���� �� d&�� \�& �� W.� J��� , W.� '��%�S� �� �$ �S�5 ���I�
��� �L!���� . ��;� F�4�$ ��=N ��n!2k �oD��� ?�R �)16 ( ':�o.���(�� '��o� �F�oE�. ���oP$ s�oCN ���o�& ����* �� hS�, ���V!� ���P$ �DCN �� �� F�E�.
W.� >.��� .� F�4�$ ��=N J(� ��;2k +��o� Wo��� #��o@ �� �X ) �oX��
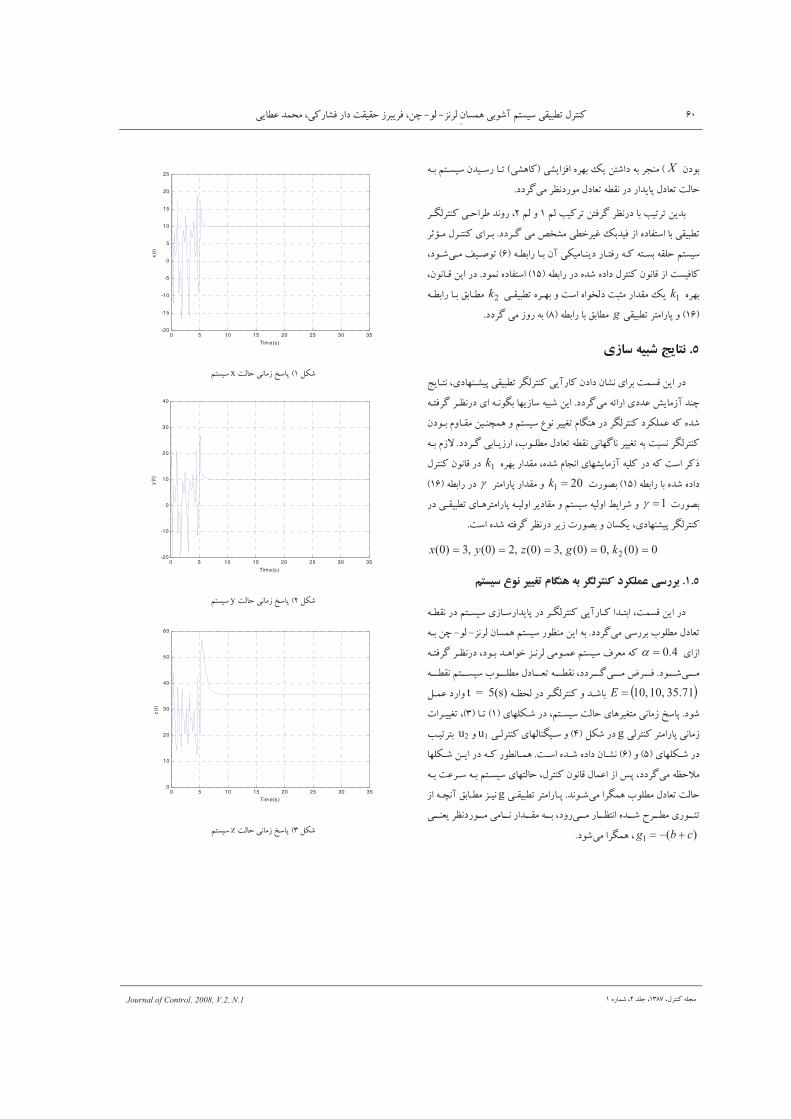
60 IN�! Z+�E�� ����" F�E�. �C��D$ �����- �!- �J*�(�D& ��=� �����<5 ��� WC�C6 :��(�5
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2����� � 1
+���X ( �<(�I5� ��;� �( J���� �� ���)�<��� ( �o� F�oE�. +��o.� �o$�� �4N���� ���P$ �DCN �� ���(�� ���P$ W!�6 ���� .
F! >���$ J�5�� �4N�� �� >�$�$ J(��1 F! ,2 �oL!���� �o6��R �N,� � ���o� �� UV<� �D0��K ����5 :� ���X�.� �� �C��D$ . �O�o� ��o��� '��o�
�oD��� �o� +" �����o�(� ��o�5� �o� ��oE� �C6 F�E�.)6 ( �o� _�o@�$ ���o� �D��� �� ��� ���� ����� +�N�S :� WE�5��)15 (���N ���X�.� .(� �� �+�N�oS J
��;�1k �oC��D$ ��o;� , W.� ���V!� W��� ���C� �(2k �oD��� �o� ?��oD�)16 (�C��D$ ������� ,g �D��� �� ?��D�)8 (���� �� :,� ��.
5 .(6�� ���� X)��<
b(�o�N �'��;�o<�� �C��D$ �L!���� �("��� +��� +�<N '��� W�ES J(� ���� �]��� '��& �(��:" ��* ���� . �o�5�� �o4N�� '� �oN�L� �;(:�. ���� J(�
+��o� a,�oC� J�o�g�� , F�E�. j�N ���x$ a�L�� �� �L!���� ����& �� ��� ���o(:�� �v�oD� ���P$ �DCN �N�;��N ���x$ �� W�EN �L!���� ���o� . �o� a:)
��;� ���C� ���� a�N� '�;<(��:" ��� �� �� W.� ��m1k ����� +�N�S �� �D��� �� ��� ����)15 ( #��%�201 k ������� ���C� ,4 �D��� ��)16 (
#��%�14 F�E�. ��!,� /(��� , �� �oC��D$ '�o�������� �o�!,� �(��C� ,W.� ��� ��5�� �4N�� �(: #��%� , +�E�( �'��;�<�� �L!����.
0)0(,0)0(,3)0(,2)0(,3)0( 2 kgzyx
1.5 .N�J�� s�< ���g� a�Q� �� �Q"�� !����' ��2��
�oDCN �� F�oE�. ':�o.���(�� �� �oL!���� �("��o� ��o��� �W�ES J(� ���� �.��� v�D� ���P$ ���� .IN�! +�E�� F�E�. ��4�� J(� ��- �!- �o� J*
'�:�4.0% ���o� �o���0 IoN�! ���o�& F�E�. ��P� �� �o�5�� �o4N���ooo� ��ooo� . �ooo� {�ooo5 �oooDCN F�oooE�. v�oooD� ���oooP$ �oooDCN ����ooo�
� �71.35,10,10E �o4=! �� �oL!���� , �o���t = 5(s) \o�& ���,��� . '�;�o� �� �F�oE�. W!�6 '����x�� �N��: �.��)1 ( �o$)3( #��o��x$ �
�!���� ������� �N��:g \�� ��)4 ( �o!���� '�;!��L�o. ,u1 ,u2 >o�$��� '�;�oo� ��)5 ( ,)6 (Woo.� ��oo� ���� +�oo<N . �;�oo� Joo(� �� �oo� ��DN�oo��
�� �46i� �;�!�6 ������ +�N�S ���&� :� G� ����� �o� W&�o. �o� F�oE�. '�� ��L�� v�D� ���P$ W!�6 �N�o� . �oC��D$ ������o�g :� �ogN" ?��oD� Io�N
�ooo� ��ooo4�N� ��ooo� ��oooD� '��ooo�$ �ooo�P( �4N���ooo� ���oooN ���oooC� �ooo� ��,�)(1 cbg ���� ��L�� � ���.
\�� 1( W!�6 �N��: �.��x F�E�.
\�� 2( W!�6 �N��: �.��y F�E�.
\�� 3( W!�6 �N��: �.��z F�E�.
0 5 10 15 20 25 30 35-20
-15
-10
-5
0
5
10
15
20
25
Time(s)
x(t
)
0 5 10 15 20 25 30 35-20
-10
0
10
20
30
40
Time(s)
y(t
)
0 5 10 15 20 25 30 350
10
20
30
40
50
60
Time(s)
z(t
)

IN�! Z+�E�� ����" F�E�. �C��D$ �����- �!- J* /�(�D& ��=� �����<5 ��� WC�C6 :��(�5 61
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
\�� 4( �C��D$ ������� �N��: #����x$g
\�� 5( �!���� ���L�.u1
\�� 6( �!���� ���L�.u2
������o� �o��x$ �o� �l�o5 /(��o� +�o�� Wo=$ �W�oES J(� ����� ��% :�4.0% ��8.0% �� G-. ,9.0% '�� �4=! �� >�$��� �t1 =
15(s) ,t2 = 25(s) ���o�& F�oE�. �� IN�! ����& F�E�. :� F�E�. j�N � �o� ���x$ J* ����& F�E�. G-. , �! �o�� . Jo(� �� �o� Wo��� �o �$ �o(��
�o�N ���x$ v�D� ���P$ �DCN �*��� W!�6 �oL(� #��o�P� �o( �o��X = 10
�� �����;LN W��O ������o� �o��x$ \�!�o� ��� ����% ���oP$ Wo!�6z F�oE�.
�D��� �� ?��D�8/)3(
2
�
%Xz �� ���x$ ���( . �(�o�:" J(� �� s���� b(��N
'�;�� �� >�$�$ �� I�N)7 ( �$)12 (�N� ��� ���� +�<N . �46i� �� ��DN����� ���� ����� F�E�. '�;�!�6 ���� W&�o. �o� +�o�g�� F�oE�. j�N ���x$ ��
�� ��L�� �v�D� ���P$ W!�6 �� ���0 �N�� . �oC��D$ ������o� �+" �� �,i&g ���N ���C� �� ���4�N� ?�R , \�S ��N�� I�Ng1 �� ��L�� ��� .
\�� 7( W!�6 �N��: �.��x F�E�.
\�� 8( W!�6 �N��: �.��y F�E�.
0 5 10 15 20 25 30 35-25
-20
-15
-10
-5
0
5
Time(s)
g(t
)
0 5 10 15 20 25 30 35-150
-100
-50
0
50
100
150
200
250
U1(t
)
Time(s)
0 5 10 15 20 25 30 350
5
10
15
20
25
30
Time(s)
U2(t
)
0 5 10 15 20 25 30 35-20
-15
-10
-5
0
5
10
15
20
25
Time(s )
x(t
)
0 5 10 15 20 25 30 35-20
-10
0
10
20
30
40
Time(s )
y(t
)

62 IN�! Z+�E�� ����" F�E�. �C��D$ �����- �!- �J*�(�D& ��=� �����<5 ��� WC�C6 :��(�5
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2����� � 1
\�� 9( W!�6 �N��: �.��z F�E�.
\�� 10( �C��D$ ������� �N��: #����x$g
\�� 11( �!���� ���L�.u1
\�� 12( �!���� ���L�.u2
2.5. �M9< - N�J�� s�< at�� ���g� �� �Q"�� !����' ��2���!�`�
�� {�5 �6�� J(� �� v�oD� ���P$ �DCN F� , F�E�. j�N F� �� ������� ���x$ . �o� {�5 ��4�� J(�� ������o� �o� ��o�% �o4=! �� '�o�t1 =
15(s) ,t2 = 25(s) :� >ooo�$���4.0% �ooo�8.0% G-ooo. ,9.0% ���( ���x$ . ���o�& F�oE�. :� >�$��� I�N F�E�. j�N #��%�(� ��
o� ���x$ J* ����& F�E�. G-. , �! ����& F�E�. �� IN�!� �o�� . J�o�g���� {�5 >�$��� I�N F�E�. v�D� ���P$ �DCN ���n� '�� �4=! �� �� ���
:�� �7.35,10,10E �oooooo�� �1.34,10,10 ��E G-oooooo. ,� �51,3.12,3.12E ��� ���x$ . �(�o�:" ,� �o� ���o<� I�N ���� J(� ��
v�oD� ���P$ �DCN �� F�E�. '�;�!�6 �(��L�� �(�� ':�. ���� b(��N ���S �oC��D$ ������� �(��L�� ,g Wo.� ��o4�N� ���o� ���oN ���oC� �o� . Jo(� b(�o�N
'�;�� �m �(��:")13 ( �$)16 (W.� ��� ���� +�<N.
\�� 13( W!�6 �N��: �.��x �.F�E
0 5 10 15 20 25 30 350
10
20
30
40
50
60
Time(s)
z(t
)
0 5 10 15 20 25 30 35-25
-20
-15
-10
-5
0
5
Time(s)
g(t
)
0 5 10 15 20 25 30 35-150
-100
-50
0
50
100
150
200
250
Time(s)
u1(t
)
0 5 10 15 20 25 30 350
5
10
15
20
25
30
Time(s)
u2(t
)
0 5 10 15 20 25 30 35-20
-15
-10
-5
0
5
10
15
20
25
Time(s)
x(t
)
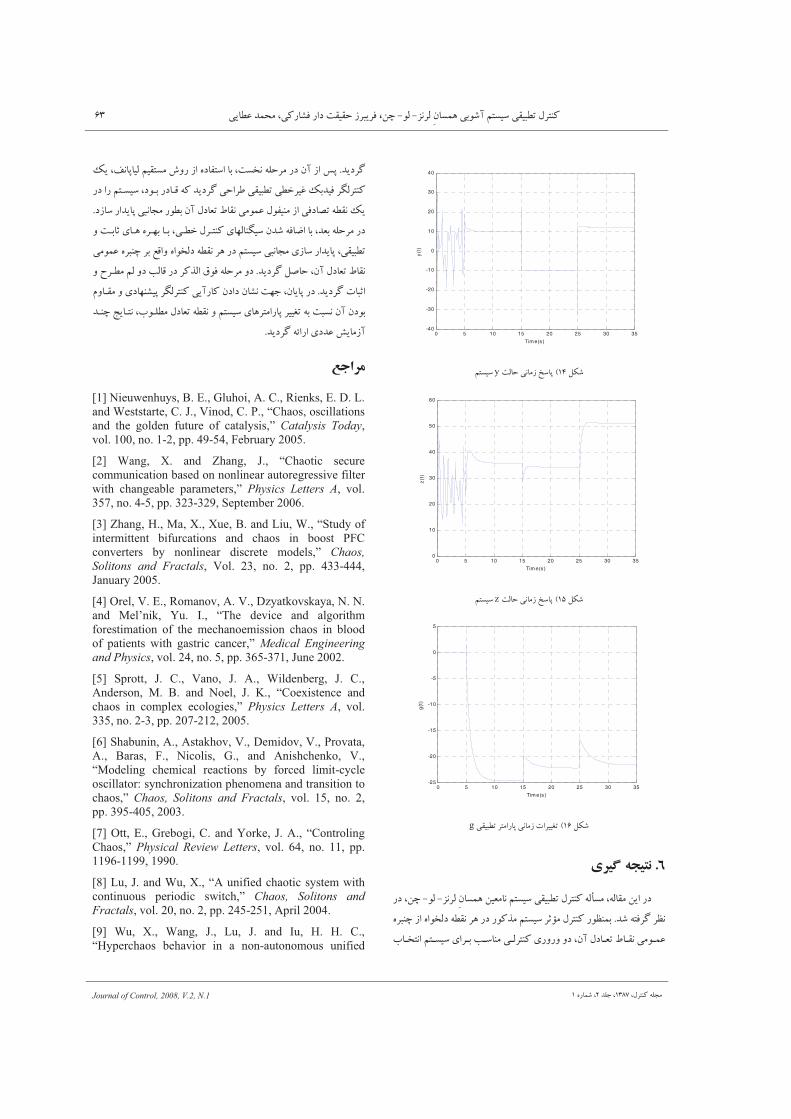
IN�! Z+�E�� ����" F�E�. �C��D$ �����- �!- J* /�(�D& ��=� �����<5 ��� WC�C6 :��(�5 63
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
\�� 14( W!�6 �N��: �.��y F�E�.
\�� 15( W!�6 �N��: �.��z F�E�.
\�� 16( �C��D$ ������� �N��: #����x$g
6 .� ��<(���
IN�! Z+�E�� J�P��N F�E�. �C��D$ ����� �!pE� ��!�C� J(� ��- �!- �� �J*�� ��5�� �4N . ����* :� ���V!� �DCN �� �� ���n� F�E�. �O�� ����� ��4���
v�ooV�N� F�ooE�. '��oo� >oo.��� �oo!���� '�,�, ,� �+" ���ooP$ s�ooCN ���oo�&
�(��� .�C�E� 9,� :� ���X�.� �� �WEVN �6�� �� +" :� G� �( �_N����! F �� �� F�oE�. ���o� ���oS �� �(��� �6��R �C��D$ �D0��K ����5 �L!�����:�. ���(�� ��N�� ��D� +" ���P$ s�CN ����& ��X��� :� �5��%$ �DCN �( .
, Wo��O '�o� ��o;� �o� ��oD0 ��o��� '�;!��L�. +�� �5�|� �� ��P� �6�� ��N �� �� F�E�. ��N�� ':�. ���(�� ��C��D$ ����& ����* �� hS�, ���V!� �DC
�(��� \@�6 �+" ���P$ s�CN . , ��oD� F! ,� >!�S �� ��n!� l�5 �6�� ,��(��� #��O� . a,�oC� , '��;�<�� �L!���� �("��� +��� +�<N W; �+�(�� ��
�o�* b(�o�N �v�oD� ���P$ �DCN , F�E�. '��������� ���x$ �� W�EN +" +����� �]��� '��& �(��:"�(�.
KL���
[1] Nieuwenhuys, B. E., Gluhoi, A. C., Rienks, E. D. L. and Weststarte, C. J., Vinod, C. P., “Chaos, oscillations and the golden future of catalysis,” Catalysis Today,vol. 100, no. 1-2, pp. 49-54, February 2005.
[2] Wang, X. and Zhang, J., “Chaotic secure communication based on nonlinear autoregressive filter with changeable parameters,” Physics Letters A, vol. 357, no. 4-5, pp. 323-329, September 2006.
[3] Zhang, H., Ma, X., Xue, B. and Liu, W., “Study of intermittent bifurcations and chaos in boost PFC converters by nonlinear discrete models,” Chaos, Solitons and Fractals, Vol. 23, no. 2, pp. 433-444, January 2005.
[4] Orel, V. E., Romanov, A. V., Dzyatkovskaya, N. N. and Mel’nik, Yu. I., “The device and algorithm forestimation of the mechanoemission chaos in blood of patients with gastric cancer,” Medical Engineering and Physics, vol. 24, no. 5, pp. 365-371, June 2002.
[5] Sprott, J. C., Vano, J. A., Wildenberg, J. C., Anderson, M. B. and Noel, J. K., “Coexistence and chaos in complex ecologies,” Physics Letters A, vol. 335, no. 2-3, pp. 207-212, 2005. [6] Shabunin, A., Astakhov, V., Demidov, V., Provata, A., Baras, F., Nicolis, G., and Anishchenko, V., “Modeling chemical reactions by forced limit-cycle oscillator: synchronization phenomena and transition to chaos,” Chaos, Solitons and Fractals, vol. 15, no. 2, pp. 395-405, 2003. [7] Ott, E., Grebogi, C. and Yorke, J. A., “Controling Chaos,” Physical Review Letters, vol. 64, no. 11, pp. 1196-1199, 1990.
[8] Lu, J. and Wu, X., “A unified chaotic system with continuous periodic switch,” Chaos, Solitons and Fractals, vol. 20, no. 2, pp. 245-251, April 2004.
[9] Wu, X., Wang, J., Lu, J. and Iu, H. H. C., “Hyperchaos behavior in a non-autonomous unified
0 5 10 15 20 25 30 35-40
-30
-20
-10
0
10
20
30
40
Time(s)
y(t
)
0 5 10 15 20 25 30 350
10
20
30
40
50
60
Time(s)
z(t
)
0 5 10 15 20 25 30 35-25
-20
-15
-10
-5
0
5
Time(s)
g(t
)

64 IN�! Z+�E�� ����" F�E�. �C��D$ �����- �!- �J*�(�D& ��=� �����<5 ��� WC�C6 :��(�5
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2����� � 1
chaotic system with continous periodic switch,” Chaos, Solitons and Fractals, vol. 32, no. 4, pp. 1485-1490, May 2007.
[10] Ge, Z. M. and Yang, K. W., “Chaotic range of a unified chaotic system and its chaos for five periodic switch cases,” Chaos, Solitons and Fractals, vol. 33, no. 1, pp. 246-269, July 2007.
[11] Liu, J., Chen, S. and Xie, J. “Parameter identification and control of uncertain unified chaotic system via adaptive extending equilibrium manifold,” Chaos, Solitons and Fractals, vol. 19, no. 3, pp. 533-540, February 2004.
[12] Chen, B., Liu, X. and Tong, S., “Adaptive fuzzy approach to control unified chaotic system,” Chaos, Solitons and Fractals, vol. 34, no. 5, pp. 1180-1187, 2007.
[13] Lu, J., Huang, B. and Wu, X., “Control of a unified chaotic system with delayed continuous periodic switch,” Chaos, Solitons and Fractals, vol. 22, no. 1, pp. 229-236, October 2004.
[14] Hua, C. and Guan, X., “Adaptive chaos control for chaotic systems,” Chaos, Solitons and Fractals, vol. 22, no. 1, pp. 55-60, October 2004.
[15] Hwang, C. C., Fung, R. F., Hsie, J. Y. and Li, W. J., “A nonlinear feedback control of the Lorenz equation,” International Journal of Engineering Science, vol. 37, no. 14, pp. 1893-1900, 1999.
[16] Richter, H., “Controlling the Lorenz system: combining global and local schemes,” Chaos, Solitons and Fractals, vol. 12, no. 13, pp. 2375-2380, 2001.
[17] Lorenz, E. N., “Deterministic non-periods flows,” Journal of atmospheric Science, vol. 20, pp. 130-141, 1963. [18] Chen, G. R. and Ueta, T., “Yet another chaotic attractor,” International Jpurnal of Bifurcation and Chaos, vol. 9, no. 7, pp. 465-466, 1999.
[19] Lü, J. and Chen, G. R., “A new chaotic attractor coined,” International Jpurnal of Bifurcation and Chaos, vol. 12, no. 3, pp. 659-661, 2002.
[20] Lü, J., Chen, G. R., Cheng, D. and Celikovsky, S., “Bridge the gap between the Lorenz system and the Chen system,” International Jpurnal of Bifurcation and Chaos, vol. 12, no.12, pp. 2917-2926, 2002

��� �� � 1387� �2����� �1 �=X@ �73-65
Journal of Control, 2008, � Iranian Society of Instrument & Control Engineers http://www.isice.ir ������ ��1387S� ��I�� , ����� +�.��;� J�N� ��+��(� ?
(��-6�� !����' ,!� ���� - O��`� ������� W4 (��� %)%L 5-2 �S�2����<\ N�)2�Q"� 0��� *�� (!�6# �L2! �� ���� ���<���
�(�X@ \�!� _�.1 � ��N:��� ����52 ��N,�$��� ���� B������ 1 ��(���.� ����� ���� ��L<N��2
[email protected], 2 [email protected]
____________________________________________________________________________
�%��+: ��(��� �]��� )�� '��:" � �� �� ���N��� '��,:�� B��P� ��$����. \6 W; h(�. , ��"��� ���E� ��,� �!�C� J(� ��W.� .� ����� �� ���S 9,� J(� �,iP� �� ��� �� +��.� J�6 �� �� ���=� �,��<� , �5�%� '^�N� �\@�X� W��6 ��E� +������ .���� �� ��S ��(: ���P$ �� ���0�� �� ���S 9,� J(� ���N^ F�(��L!� ')�� W���S �� � �$ �� �J�| �� . :� \@�6 b(��N �;�N� ��
'��� '�w5 �!�L* h��$ '���� �� �� ��,� b(��N �� ':�. ���� W.� ��� �E(�C� W.� . '��� \6 ')�� W&�. 9,� J(� '�(�I� :� uN��i� W��6 �\%X� j�N �� 9,� +���N �,�=� ���S ��(: ���P$ +���N �|�� �#��� ����& +���N ���;� �'��:" � �� ��(: ���P$
+��.� W; ����� W���S , ��� �� +��.� �� J�(�� '�D0 �UV<� ��E� +���N �R W; #�������� �� ��� ��.
�^�, '��� '�� : ���N^ F�(��L!� , ':�. ���;� ���S ����N��� ',:��
Abstract: In this Paper, an efficient and quick method for inverse kinematic solution of hyper-redundant manipulators is presented. In addition, it minimizes the joints’ displacement, energy consumption, and actuators torque while the end effecter reaches the target. Due to the flexibility of the genetic algorithm, it is capable of handling any number of constraints. At the end, the simulation result is compared with a method based on workspace density function. The advantages of new method are fast, optimization of robot function, handling many constraints, independent of joint design, real time, minimum error and ability to control the direction of reaching the target. Keywords: Hyper redundant manipulator, Constraint, Optimization, Genetic algorithm
_____________________________________________________________________________
1 .��%9�
� \�!� ���*� �'��:" � �� +��� �.��.� �� ���S ��P�@ '�� #�������� ��N s�CN :� '���E� �� . \�!� �� )�� '��:" � �� �� ���N��� '��,:��
�� �&���� '����E� :� �N���S )�� '��:" � �� , \%X� ��(: ���P$ +��� ��������( W.� UV<� ��� �(; �(, J(�`� �� ���& d&���� +��� :� #�'
� ���� hN�� �� ���0�� +,�� F0 , ~� ��� . �\�� a�R�0 #��� �)�� '��:" � �� �� ���N��� ',:�� ��N����� #���
)�� '��:" � �� �� #��� , ��.��� #���'�;��N �� �� #��� j�N J(� _�V������[1] ./.�$ ��� J�!,� '��� )�� '��:" � �� �� #��� +���& ( ��*+���1
W.� �� #��� j�N J(� '��� a�N J(�$ >.��� �� �(��� ��D� .
1 Chirikjian
��� �� #��� J(� '�������� ���� � WP�@ �� ���X�.� �� +��$+��.���$� [2,3]� '� ��E� '�������� �� ���X�.�[4]�6�� �[6,5] �
:�� , WXN '�� �!�! �.�:��[7]�L� /�=� �� �(�.��� #���& �[8] �� \� �.�:����E�� '�[5] ������� #��� �[9] ���( J�� #���& �[10] �
#���#���0 �.�N �(�w5[11] �(�w5 '�� ��L�E(� J�0�. ,[12] ��������.
�DCN �� +��.� �5�@ )�� '��:" � �� �� ���N��� ',:�� ����� :� ��� ��E� �R J�6 �� ��� ���� ��N J�P� ��E� ',� �� W��6 �( , UV<� '�
(�� �����N �|�� I�N �� �(����S WE . '����S ��.� ,� �� +��$ �� �� ����S J(��� WV. '����S , �N�� �� J��P$ ����� /.�$ �� a�N '�� W(�,�=� I
��� '��� F�EC$ ����� �� �� #��� J(� �$�m . \��� WV. '����S W(�,�=� , \@�X� W&�. W(�,�=� �\@�X� +��,� �(,�: W(�,�=�
���, �,��<������ �� \@�X� �� � . �i�0� +��� \S��6 \��� a�N '����S

���N^ F�(��L!� /.�$ )�� '��:" � �� �� ���� ���N��� '��,:�� ����& +��� ���;� , B��P� ��$����. \6 '��� �(� 9,� �]���66 �(�X@ \�!� _�. ���N:��� ����5
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
�� ����, �,��<� +��� \S��6 �\@�X� #���6 '^�N� +��� \S��6 �\@�X� , hN�� �� ���0�� a�& �\@�X� �� ����, ...����� �� . \��1 ����� +�<N
&�N� ,:��' N������ ��:" � �� ��' ��:" �� ��� ��0�. )��(C=$ ��L<�$�C� JPL �� ����[9].
��E� ��� , ,:�� �.��� �� ����� �!�C� J(� �� ��0���� �����. G-.9,� ���;� v�V�N�:� �����$ \��� �� �(� ��� '�w5�\@�X� \6
F�(��L!� /.�$ B��P� ��$����. J(��;� J�5�( , ���N^ �� v�� ��=! �,��<� +��� ���;��� ���� ��� ����� �� ��� .�N� �� ��� #��O� ��4�� �� �;
��" b(��N �(� 9,� +��� b(��N �� , ��� ':�. ���� :� \@�6 :� \@�6(�� �� 9,� :�' ���� �� �� ���n� �� ��� ��D�' �w5 �!�L* h��$'
���') 9,�WSDF1( �E(�C� �W.� ���� ��.
\��1 :,:��' N������ ��:" � �� ��' )��[9]
2 .�uJ� v�� - -6�� ��2�� � 1.2. ��uJ� T)�`�
� :� ���( �!�C� J. \6 �5�@�$���� , B��P� � \@�X� '�(�,: J�5�(���� ��N UV<� ��� �� +��.� W; . J�| �� W.� ��,� �]��� ���
�,��<� ��N�� ������(� '��������� �� ���0�� �� ���S B��P� ��$����. \6 ��=! �� #��� ����& +���N ���;� ,+��: ��E� �R +���N �|�� , '^�N� ,
���� \@�X� +��,� �(,�: ��S , �,��<� ��S ��N�� #��� �� ����, '����S .� {�5� ��S �� W&�. #����x$ �� ���' � �� W.� a��"� v��� :� +��$
��� �4�5�@ . �� ����S , #��� ����& +���N ���;� ������ \��� �.��� �� �����
��� �� ��0���� .
1 ) Work space density function :� ��� ��27 9,� J(� �� �!�C�
W.� ��� ����� .(
2.2. r%� ��� '�(�,: :� '� ���� J�5�( , B��P� ��$����. \6 �!�C� J(� �@�
h��$ �� '� �N�� �� ���� �� \@�X�h ����� ��� �$ #��� �. �@�5 +��� �(���� .
)1( 222 )()()()( gegege zzyyxxxh �����
eee zyx ,, #����. #�%�V�)�O�� '�;�N� ( ,ggg zyx ,, #�%�V��DCN , ���R /.�$ �� ����� �� ����R�CN v�V�N� �� �IN( �� F� �� �
,�' E�� ��N�� �� J��P$ . 3.2. $��2 !����' ,!� ����
:� W.� #���& #��� ����& +��� ���;� : 1- #��� W��6 +��� uN��i� : �i�0� WE(�� �� ��4�� J(� '���
� ��� ���� �(��N �(: �D��� �� �� \%X� a��$ #���6 ��(: ����� ����� W.C�E� �D��� +��: ��������� \@�X� '�;���6 +�I�� �� F .
)2( |))(|min & |)(|min(
1
',,
1
',,
��n
iyiyi
n
ixixi ::::
�D��� ��2�xi,: \%X� ��!,� �(,�:i ,', xi: \%X� �(�N�O �(,�:i ��
�0�* '��.��x ����� �� .yi,:: I�N \%X� ��!,� �(,�i ,', yi: �(,�:
\%X� �(�N�Oi�0�* '��.�� ��y ����� �� . ��� J��P$ W�PS�� :� #���W�PS�� �� '� ��� J��P$ ���� ���S +" �� #��� �� �=� ��,� �� �L(�
)#��� '��� ���� ��=! �� (W�PS�� PS�� ���� W�PS�� , #��� ��!,�� W��� �� �����N �(�N�O .
2- �,��<� ':�. ���;� : \@�X� �� ����, �,��<� WE(�� �� ��4�� J(� '��� �D��� :� ��3 �� ��� �� ��.�=������ ��. W��6 W&�. ��N" �� � �$ ��
��� �4�5�@ v��� �O� :� +��$ �� ���� �� J�(�� ���E� .�4N �� �,��<� ��5��. �,��<� �����PS�� �� F�E�.� W�� ��� �� +�� ���� .!��� \( >D� J
N ��.�=� \��S�R �� #��� �� ����, �,��<� +��� E��� �� ���� . �� � �$ ��J��� W��6 \S��6 �� #��� \@�X� ��N" );� ��4�� ���^�N� +�� ��' ( ��
PS���� v�D� W� ���.� �� �%C� �,��<� J�5�� �4N �� ���;� ������� +���&.���� �� W.�� �|�5 ':�.
)3(
n
iiTT
1
2
iT��.�� �� \@�X� �� ����, �,��<�' ����=�' x,y ).���� ���& ,'( �� �����. ���' � \%X� �� �� ����, �,��<� ��.�=�� ��(��N �,��<� WE�
! a��$ :���� ��' \%X� +" �� �O�� )!��� ��' � �� ��5�� ���S' +"#��� �. �$ \%X� (���N ��.�=� �� . �D���4 � +�<N �� �,��<� ��.�=� ��=N�
���. )4( )( iiii FRZT �)

���N^ F�(��L!� /.�$ )�� '��:" � �� �� ���� ���N��� '��,:�� ����& +��� ���;� , B��P� ��$����. \6 '��� �(� 9,� �]��� �(�X@ \�!� _�. ���N:��� ����5 67
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
)�� �D��� ��iZ �+��,� ��=�iR � ������a� I��� �$ \%X� J �EN� ��!���)iC ( ,iFN�,�' � ��m� ' )�D���5( �� �����.
\��2 :��N(�� +��!� �' �,��<� ��.�=� )5(
n
ijji gmF
�D��� ��6 �m ���� �� ���! �� a� . �EN a� I���� ! ���N ��� :� I �D���6 � W.��� "(� .
)6( '0 iii cAC �D��� ��6 '
ic! �� a� I��� �� , ���Ai0�$��(��$ G(� JL�� #i�
�R :� �� �����(,�N� /��,� ?(: \�� �� , ����$��� W(� ��.�=� �� ���� . )7( AA A 1i
i01i
0i
��
)8(
���
�
�
���
�
���
��
�
1000coscoscoscossinsin
sinsincoscoscossin10sincos
idiiiiii
idiiiiiiiaii
Aiii
%%%:%:
%%%:%:::
)�� �D��� �� ia �r��<� ���& ��Rid�@�5 ,i: ,�:(+��,� � �� J��=���' 1�iX,iX ,i%,�:(� �� �g�� ����� .\�� ��3 ��N( �
�(W.� ���" ��������� J.
\��3 :��nL��N' ,�N�( ����$��� W[12]
3- '^�N� +��� ����� :'^�N� +��� ����� :� ��� ���: �D��� +��� ��( ��� ���� .
)9( iiTE :�
���' ;��^�N� +�� ��'iiT :�, �� ��(�� ,� �� WE��N��� �� .��� +�� ��� , �� ���� ��� \�S W�ES �� �,��<�� �(�� �� �;�$ W�ES J� +��� ��
i:�� ��0����� ��� .���' ��� +��� ��i:� �� ��( �D��� WE10 ;�� ������ .� a�;X�(� �D��� J(���� �� #��� �� W.� J( ��� �� W��6 J�.��[12] .
)10( ))()(min( 2
1
',,
1
2,
',
���n
iyiyi
n
ixixi ::::
4.2. ,!��< �e2�%�R �� 1- �,��<� : �� ����, �,��<� �� ���� '� �N�� �� WE(�� �� #��� '��� ����
���N :,�$ ':�� �6 :� \@�X�) �D���11.(
)11( 1,2,3i TT max(i)i # �D��� ��)max(iT \%X� �� /.�$ \�=$ \��S �,��<� F�(I��� I�N ( �
I���(� /.�$ ���&� \��S �,��<� F���$� ���� �� UV<� '��.�� �� . 2- X� +��,� �(,�: W(�,�=�\% : �� ��4�� J(� '��� +��,� �(,�: WE(��X����LN ��<�� ':�� �6 :� \%.
)12( 0,1,...ni �� j)max(i,ji,),min( ##ji:
),min( ji: ,),max( ji: �� \%X� �� +��,� �(,�: �����6 , \S��6 I�N<� '��.������� �� UV.
3. W4 5-2 �� � ��=N , ��� �� �V� J(�' � 9,����;�<' �:���� �� . �(�� ����� ��
;� �,���� '�;�,� �� ��� �]��� 9,� �� ��� ��X�� F�(��L!� /.�$ ':�. ������ �� #,�X�� ���E� ���N^ . �� #��� �� ����, ��S ��(: ���P$ ��� J(� \�!�
;�,� :� ���X�.� �� ����: �(�I5� >�. �,���� '�( \6 +��: �� �D0 , ������ .����� �� I�N F�(��L!� '�� � >�$�$ ��� �� +���& �(: �� �� ��!�D�. 1.3. ��J� Y��`�
���� _(�P$ #��� '��� W��6 ��E� WE(�� �� ����� �� . /.�$ ��� J(��� �(�IN s�CN J��P$ �� , ����� E� ',� F�'�;5�� +���& �� �� �� �N���
��(n� �� #��@ ���E� . �$ #��� �. �@�5 +��� \S��6 F�(��L!� �X��,W.� s�CN J(� .
2.3. s-�� ��`e- Y��`� �( WE(�� �� �(��N :�K" �� ��0 W��6 �N���� #��� ��N" '���
W5�� �4N �� +" '��� j,�� W�P|, . {�5 �6�� J(� �� �� ��� a��$ �;!,������� J��: �� ���& , F� ������ �� . �5�@ W�P|, J(� J�5�� �4N ��
W��6 j,�� '��� �� '�L(� W�P|, �� +��$ �� , W.� ����. '������ v�V�N� .���� ��N j,�� W�P|, �� ��E��, F�(��L!� ����& . :� G�
'��� j,�� W�P|, +���& �� \�S �6�� �� #��� W�P|, W��6 j,���� �� +��.���� �� ��5�� �4N �� '�P� W�PS.
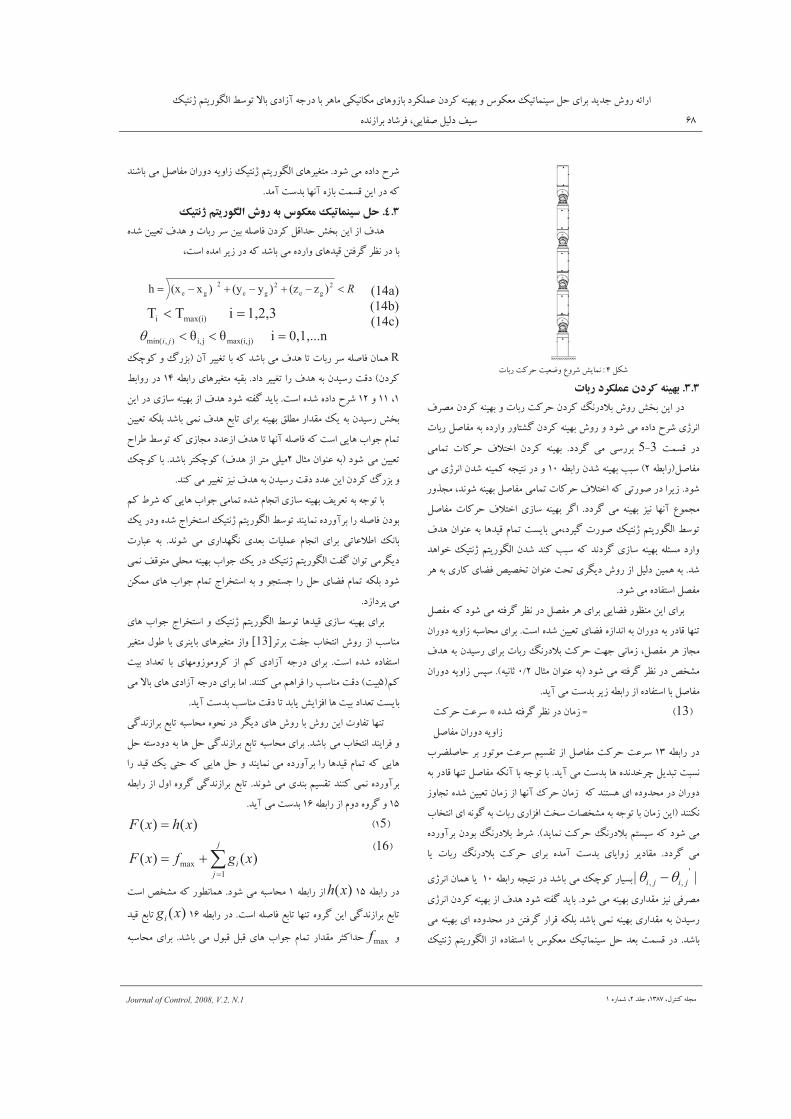
���N^ F�(��L!� /.�$ )�� '��:" � �� �� ���� ���N��� '��,:�� ����& +��� ���;� , B��P� ��$����. \6 '��� �(� 9,� �]���68 �(�X@ \�!� _�. ���N:��� ����5
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
\�� 4 :��N(P|, j,�� ��#��� W��6 W
3.3. $��2 !����' ,!� ���� � ��(i� 9,� �V� J ��%� +��� ���;� , #��� W��6 +��� uN��
� ���� ��� '^�N�� #��� \@�X� �� ����, �,��<� +��� ���;� 9,� , ��� W�ES ��3-5 �.����� ���� .+��� ���;� ����$ #���6 �i�0�
\@�X�) �D���2( +�� ���;� >�. �D���10 �N �� ,��� ��^�N� +�� ��' �� ��� .:($��@ �� ��� ���$ #���6 �i�0� ��� ;� \@�X�� �,n� ��N�� ��
j���N �;N"�;� I�� ��� ���� . ':�. ���;� ��� \@�X� #���6 �i�0������ #��@ ���N^ F�(��L!� /.�$ WE(�� ��S a��$� ��� +���& �� ���
����0 ���N^ F�(��L!� +�� ��� >�. �� �N��� ':�. ���;� ��E� ���,�� . �� �� '��� '�w5 U�%V$ +���& W=$ '�L(� 9,� :� \�!� J��� ��
��� �� ���X�.� \%X�. \%X� �� ��� �� ��5�� �4N �� \%X� �� '��� �(�w5 ��4�� J(� '���
� �� +��,� �� ���S �;�$��N: ��w5' W.� ��� J��P$ . +��,� �(,�: ��.�=� '��� ��� �� +��.� '��� #��� uN��i� W��6 W; �N��: �\%X� �� :��
��5�� �4N �� UV<� ��� ��) ���� +���& ��2/0 ��N�O .( +��,� �(,�: G-.�(" �� W.�� �(: �D��� :� ���X�.� �� \@�X� .
)13( = ��� ��5�� �4N �� +��: *�. W��6 W&+��,� �(,�:\@�X�
�D��� ��13 � \@�X� W��6 W&�. v�w@�6 �� ��$�� W&�. F�EC$ :EN�(" �� W.�� �� ��N�0�* \(��$ W� . �� ���S �;�$ \@�X� ��N" �� � �$ ��
� ��,�=� �� +��,�' �� ���E� �;N" r�6 +��: P$ +��: :��� :,�$ ��� J����N )�(�%V<� �� � �$ �� +��: J��I5� WV. #' � �N�� �� #���' v�V�N�
�� . �� ������N W��6 uN��i� F�E(�.( ���,"�� +��� uN��i� s���� ���� .��C�(�,: �(�' ��� ���" W.��' #��� uN��i� W��6 �(|| '
,, jiji :: � ���� �� �*�� ���E��N ��� �D��� �10 ( +��� � '^�N�5�%�� ���;� '���C� I�N��� �� .��(;� :� ��� ��� ��X� ��^�N� +��� ��'
.�����C� �� +�' ;���N ��� � ��,�=� �� J�5�� ���S ��� ����' ;��� ��� ���� . ���N^ F�(��L!� :� ���X�.� �� B��P� ��$����. \6 �P� W�ES ��
��� �� ���� ��� .N^ F�(��L!� '����x��� ����� �� \@�X� +��,� �(,�: ��(� �� ����" W.�� �;N" �:�� W�ES J .
4.3. ���<\ N�)2�Q"� 5-2 �� O��`� ������� W4 ��� J��P$ ��� , #��� �. J�� �@�5 +��� \S��6 �V� J(� :� ���
�W.� ���� �(: �� �� ���� �� ����, '����S J�5�� �4N �� ��
(14a) (14b) (14c)
R#����� 2ge
2ge
2ge )z(z)y(y)x(xh
1,2,3i TT max(i)i #
0,1,...ni �� j)max(i,ji,),min( ##ji: R � ��� �$ #��� �. �@�5 +���� x$ �� �� ������ +" �) �*�� , ��I�
+��� (.� WS��x$ �� ��� �� +������ � . ��C� �D��� '����x��14 /��,� ��1 �11 ,12 W.� ��� ���� ��� . J(� �� ':�. ���;� :� ��� ��� ��X� �(��
?D� ���C� �( �� +��.� �V� J��P$ ��� ���� ��N ��� h��$ '��� ���;��� v�� a��$��&:� ��� �$ �;N" �@�5 �� W.� �( ���R /.�$ �� ':��
�� J��P$ ���) ���� +���& ��2��� :� ��� ��� (���� ���*�� . �*�� ����� �� ���x$ I�N ��� �� +��.� WS� ��& J(� +��� ��I� , .
':�. ���;� _(�P$ �� � �$ �� F� s�� �� �(�� v�� ����$ ��� a�N��$ ��(��N ���,"�� �� �@�5 +���, ��� k��V�.� ���N^ F�(��L!� /. �( ��
�N�� �� '���;LN '�P� #���& a�N� '��� �$�&iR� �N�� . #���& �� ��N _S��� �=� ���;� v�� �( �� ���N^ F�(��L!� WX� +��$ ���L(�
��E �� \6 '�w5 a��$ ��� ����� v�� a��$ k��V�.� �� ,' J����� �:����.
��V�.� , ���N^ F�(��L!� /.�$ ����S ':�. ���;� '��� '�� v�� k�$�� WX v�V�N� 9,� :� >.���[13] , ��x�� ��R �� '��(�� '����x�� :�
W.� ��� ���X�.� .���' �;�,:��,�� :� F� '��:" � ��' W�� ���P$ ��F�)5W�� (���� �� F���5 �� >.��� WS� . �� )�� '�� '��:" � �� '��� ���
�� >.��� WS� �$ ���( �(�I5� �� W�� ���P$ WE(���(" W. . $ ��.�=� ��=N �� �L(� '�� 9,� �� 9,� J(� #,�X$ �;�$ ���N:��� h��
�� v�V�N� ��(��5 , ���� . \6 ��.�,� �� �� \6 ���N:��� h��$ ��.�=� '��� �� ��S �( ��6 �� �(�� \6 , ��(��N �� ���,"�� �� ����S a��$ �� �(��
�N�� �� '��� F�EC$ ���� ��N ���,"�� .h��$ :��� �D��� :� �,� �,�� ���N15 �D��� :� a,� �,�� ,16 �(" �� W.�� . )51( )()( xhxF )16(
�j
ji xgfxF
1max )()(
�D��� ��15)(xh �D��� :�1 ��� �� ��.�=� . W.� UV<� �� ��DN���W.� �@�5 h��$ �;�$ �,�� J(� ���N:��� h��$ .D��� �� �16)(xgi ��S h��$
,maxf���� �� ���S \�S '�� v�� a��$ ���C� �����6 . ��.�=� '���

69
Jou
��I�� .
#� ��� ��� ��
���N^ F�( 9
urnal of Control, 200
I5� a�N �� ���" W.
� ��0���� �;N" �� �
' _�V� �(��� U)\��6( � +�<N
�� �,� �� �1 �" �,� ��N��1 ��� ��
UV<� ��E� ',�
a�� ���
'� �C��E� (� �DCN �'
3 ��� ��� 2 N���� J$�
�(��L!� /.�$ )�� '
08, V.2, N.1
(6�� ���� 6 �� b(��N �(� 9,��.��� �� �(: �� ��
$��2 �DiU 2! �F�(��LP|,��� W'
6�R J� E��UV<� ������' ��L!�(�N^ F�
�� F�(��L!� , #���
�� #13 � �� '��:" � ��F�(��L!� F;� '������
1 ��� �1 �N�.�2 � ��
1000 '��(��
� v�V�N���$� >(
9/0 15
2/0 N�O��
6/0 ��N�O:� ����:� ����
'��:" � �� �� ���� �
6� WU�4 X)��<� +��� ��"��� #��
� �W.� ��� ':�. �2 ��4 ��`e-
�L!� ����& �.���1 '��:" � �� 6 ��
����� , #��� #�%V#�%V<� I�N �����
���� ��m �= .
#��� W��6 ��=N �.��� �,� 1 :���
\@� �X$� ' ��!,� �S
�
F�(��L!� ����
��� ��� ��5��' 9
���N��� '��,:�� ������N:��� ����5
4 .< ��2���O� ��4�� ��
Matlab ����1.4. - ��2��
� ��4�� �� �� '� �=X@13
W.� ��� . V<�W.� .� ��C� ��
=(�@ ��N" �L�
\�� 6 :�
! �� +:,� ����R
�X� +��,� +�I���� v�� ���P$��!,� v�� j�Nv�V�N� �L�&>���$ �L�&>���$ ����6�
�$ #�P5� +�I�� ���N^
� �4N �� +��:\@�X� W��69:���� W&�.
�D0 :�� �,��<�
���& +��� ���;� , �(�X@ \�!� _�.
a��$ �� v�� �� +���& ��maxf
�( \��� \�� J� .N \6 '�w5� I
�N��� �� �� ( ,��� ('��� F�EC$
��N:��� h��$� 3 �* W�. \6
�:�. �� ( �� :�
���� �� v . ��(:
�� ���� ���C�
��(� , a,:��,
:� ��� :� #����� ( ��� v�V�N�
��� ��.�=� �� \
W.� +" �(��LN9,� ��[12]
B��P� ��$����.
�,� �,��)� ��,��+" ���C� J(��<�� ,
W.� ��� ���� ���.� �W.� ��� �� ����
��,"�� ����S a��$ +�� ��N ���,"�� ��S
� (� �w5 J� ����.��N:��� h��$� 6 �.
� ����.
���N:��� J��P$ �[13]
���� �. . ���,"�� �� �� ��S a
v�V�N� ���� ���N
� �� v�V�N� ����
�� ,� >���$ '��
�� �. �@�5 �;N" ��
�� �� J��P$ �6��R\6 J(� ����$ �,��<
��� �� v�V�N� . � h��$ �LN ���, ��
���� � .� >D� J(�
\6 '��� �(� 9,
�����1
� '�� \6 a��$ ���:�. (, ��� ��.�=�
� }���<' � ��(�� J' ���� +�<N uN� �� �)+" �� �� �(�w5
S �( ��6 �� �(�w(g �X$������ �
/0 JF(x) $ ,
W��O ���Cmaxf��
\��5 :�LN�L* �.���
�� #��@ �(: 9,J��)a��$ �� ����
W.� �. J��� v:��� �� \6
���� � .
J��� ��K v I�N ���� '���*� .
�� '� �DCN �( >�W.� ��� ���X .
2-��C� Y)���� ��� �(�� v�� ���
�)R /.�$ ��& J(��D��� �� � �$ �3 <�
v�� +���& �� �,�� F�C�E� ��R �� �,�� , ��� �� #��
,� �]���
������ ��1387 � �2� �
maxf ��N:��� ���C�. �� ���,"�� �� ����
���� �� �5�P.
\�� ��5 |�$�}�� �� �� \6(�� ��'
���S \��S ��.� ,� �� ��K '�w J�)w5
�N�� � .0) x
� W.�� W�. \6(J
j��)(xg C� ,
,� :� I�N v�V�N� ��(��
1- �� v�� ����;� J��� ��K v��
2- v�� ,� J����� ����� ���� +
3- v�� ,� J���� ��& +" ���N:��
- ���$ �L�& :�X�.� �(� a,:��,��
5.3. �� W4 j�k�<���$ \�S �6�� �����*�� ':�� ��
W. .�� �6�� J(� ����<� J(���� �� \6 ,��<� ��N" \�!��� +��.�N +���� ��
W.� ��� �.��.
�
x
��SP�
6��
w5
��6
�
�5
��
��
�3
�&.�,
���

Journal of Co
�w5 �� ��� ��
���;� W!�6, F.�g�� ,� J
\�� �� � .( '���� ��E�
���N^ F�(��L!� /.
ontrol, 2008, V.2, N.1
� J��P$ ����� �� +��.�
� #��� W��6 W+��)J�* /0 (.�
� �� ��� ����N ���'^�N� +�� � #���
�,��<� +
.�$ )�� '��:" � ��
1
�� #20 '��� '��:" � ������.
(\�<� , ^�N� +�� ' P|,�W
uN� (� ���;� a�& ,W.� ��� ��.)���&�
���;� W!�6 �� W.
\�� 9 :��� ���;� �.���
� �� ���� ���N��� '��N:��
8 :#��� W��6 �.���
,%� ���� ��2��; .��� W� ;����
'^�N� )� �� s�D0' 5�%�� .�=� �;N"
� UV<� �� �N�� ��� �� � .
'��,:�� ����& +���(�X@ \�!��� ����5
�� +��.�� '��
, �.��
��6 W��� ������ U, j,��
3.2( ,W!�6
\�� 8 UV<W.� �. ����� .
.
\��
4.4.
+��^�N�'
+����R ��
�� ���;� , B��P� � � _�.
r .� �� �O�� '�;�N�
��S #��@ �� �N��$
+ ��� ��
� ��� �� )�� :� �� ��.�� UV<�.
(%`� 2 6 �� '��:" � ��
�5�� �4N �� ����� ��� �� �� UV<�
� W�PS�� :� #��� ;� #��� ���� )�V�
��<�� ��|, ��4��W.� ��(���. � ��
�N� ��� ���� +�< .<����.� ��� J��P$ �
:� ����2 �� ���/0���� �� ������ �.
��$����. \6 '���
r%� �� ,%��2 2W; J��P$ W���S
���� .�� F;� J(�
_�V� '�� W; ��.�W.� ��� ��.��0 W� ��� �� J�(�� :� �$�� (�?� 2! N�)\@�X� �� �$��� ��w2
y�� F� :� '�� ��� +���& �� �DCN
W��6 ��� , W� �N�� ' ���& ��
�N�) �V�4.2 .(� ��� F�.�$ _�V� \
'�� �����1 �$3 <N��� :� ����� �� F�
� �D0 +�I�� , ��N�O >�$19/0 �14/0 �2
�(� 9,� �]���
138 � �2 ����� �1
! �o�� (���<� (�9,� J(� '�(�I� :
� �� UV<� +��,���� ���, ���N .
\�� 7: �.���W��6 J���. '���$ ��� ��.��0 '�P� )2�Q"� !����' �
w5 �� W��6 �.��'����=� '��. x ,
'���P$ W!�6 J(� W.� ��� ��5�� �4N
�� ���� �� ����� ��� �|�� +" �� ���
�� #��� _2 \��� �� #��� _�V� '� ���E� �@�5 �� #��
\6 +��: W!�64/1 '�� W!�1 �$3 �$ ��
70
������ ��87
2.4. ����2:� ��(,� �� ���N^ F�(��L!�
\�� ��7����� '���
3.4. ��2���� '���.�� �� �;N"
W.� .'����� �w5 ��J(� +��.�
S����' ��,_�V� '��'�� W�PS��
�� �. W.�6 J(� '����6 '���D0

71
Jou
� � ��
���N^ F�( 1
urnal of Control, 200
, \@�X� W�PS�� ����� 9,�WSDF ,b (�=N
��6 ����;� +,�� #��� W
�(��L!� /.�$ )�� '
08, V.2, N.1
1 '��:" � ��) � � +�<N� ?�R #��� W��6 ��=
#��� ����& +c (�=N#��� ����& +
'��:" � �� �� ���� �
#��� ����6 W�P|,10��� W�P ���� ��. (a =N
�(� 9,� ��� ���;� ��+���
���N��� '��,:�� ������N:��� ����5
\�� 11 :, �E(�C�
PS�� ����� +�<N� �� #��� W��6
���& +��� ���;� , �(�X@ \�!� _�.
�(��* 9,� +�� �(�,: J��P$ 9+�� �(��* 9
WSD WSDF �E(�C�
�w5' ���' �� ����.(
#��� �. hS��� W��� �� WE(��
�� �� +��.� #�{�5 �� �(� ���C� ��� ��.�=UV<� �� ��D�� '���� �,��<
B��P� ��$����.
5-WSDF+��: ��=! �� W.�
9,� J(� '�(�I� :� ����� uN .9,� ��
#��� ��<NW.�.
a ( 9,� WSDF �(�
5-2 �� �J)�9DF9,� �� 9,� JF!�L* h��$ :� ��� 5
� �(�w5 W!�6 �� ,:W(���� �� W.� U
�(��N .��N #��� �.>�." +���� ���
9,� �� �,��<�=� �� \6 ����$ �,
W.� ��� �� .DN����� ���� ��<� �� ,:
\6 '��� �(� 9,
�����1
2 �� �J)�9� - W4 \�� 10 UV<�
���� '�$�� .��( ���N��i� #��� W��6
� W��6 +��� uN�
\� 10 :\6 +��: �.���b ( 9,�
9� - 2-��C� ,%�J(� �(� 9,� W
���� �� 9,' ��X�.�*6 $��@ ��� :�� ��
UV<� �� ��DN��� N �� ���& +" :� , �+��� >@ #��@
� +��� ���;� #��OkgM 1 ,��<�
���N �� W!�6 :� a� ���;� #��� ����&
11- b(.
,� �]���
������ ��1387 � �2� �
5.. ,��6 ��2���� �� ��DN����(� 9,� �� +��
6 �� W.� '� �N���=@��� �� ����i� �
��
6.. �� ��2���� �W���S #��O� '���
W.� ��(���. �(J ,���)P��$� ��P�� ��6*
\�� ��a-11���� ���0�� ���
@�� ��(: ��� ���0����� �� .O� '���
ml 1.0 ,g��� �� ',� �� �;N
�& �� ��!�6 �� W.�.� �� ��)\��
�
4
�@
4
����
����
, N".�
��
���N^ F�(��L!� /.�$ )�� '��:" � �� �� ���� ���N��� '��,:�� ����& +��� ���;� , B��P� ��$����. \6 '��� �(� 9,� �]���72 �(�X@ \�!� _�. ���N:��� ����5
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
7.4. �M1 ��2�� 5-2 �� �J)�9� -WSDF � �� �(�I5� �� ���� �� ��� �$ #��� �. �@�5 +�I�� +��� �� �D0
���( �� �(�I5� '��:" . '�;�,��� �D0 +�I�� �.��� :� \@�6 b(��N ���n�)9,� :� ��K ��WSDF (W.� >D� J(� '�(�� I�N .�I� :� ��( '�(
�� �� ���! ��R �( , '��:" � �� �(�I5� �� �D0 �(�I5� a�& 9,� J(����� . ���S \��S '�� v�� v�V�N� �.,�� �� �� W.� +" >D� J(� \�!�
:� �;N" �@�5 �� �N�� �� v�V�N� �(�� v�� ����N^ F�(��L!� /.�$ ���� ���P� ���C� ��� ) �� #��� �. ���� +���& ��1 ��� ��N�. ��� '
���� .('��:" � �� ��N�� #��� /(��� �� ���x$ �� >D� J(� , \%X� j�N��� ��N ���x$. \�� �� � �$ ��a -12 '���E� �i0 �� �� W.� UV<�
���� �D0 +�I�� �� �,�� ���P$ �(�I5� �� �L(� '�;�,� :� ���( �� . �� \�� �.���b-12 ��E��, �D0 +�I�� �� W5�� ���N +��$ �� � �� ��
��:"' ����N) �� �D0 ���� +���& ��35 �� �D0 :� '��:" � ��5 � ������ �� ���� '��:" (���� �� F� ���E� I�N +" ���C� , . +" F;� ���N ���
���P� ���C� :� +" +�I�� �� W.� ) +��.� '��� ��� ��5�� �4N �� �@�5��� �� #��� �. (���( ��N �(�I5�.
\�� 12 :����D0 �. a (9,� '�D0 �����N WSDF
b (�(� 9,� '�D0 �����N
8.4. WU�i� s�< �� %)%L 5-2 ,!��< ��J��- ��2�� \@�X� j�N �� �(� F�(��L!� �L�E��, �;�$ �� '�;�N� #�%�V� J��P$
���� �� #��� . ���P� '�� 9,� :� ���X�.� �� I�N #��� �. #�%�V� J��P$� #��� F�C�E� ��$����.���� �� \6 \��S ����$��� W(,�N� ��N� . ���x$ �n!
���N:��� h��$ ��.�=� ��=N �� ���x$ d&�� �;�$ \%X� j�N ) :� #��� �. �@�5 ���(��� ��. '�� \�� ��6 ,7 '��� B��P� ��$����. ��E�2 j�N
\@�X� �� �(�w5 , '� �X@ #���1,2 W.� ��(��� \6 '��:" � �� . �L(� '�� 9,�$ j�N �� ��E��, , �N� ��� \6 \%X� :� �@�0 j�N '��� �;�
���E� \@�X�.
9.4. �Q)! (��%�R (���2��� �����R �� _�V� '����S +��� �5�|� W���S 9,� J(� '�(�I� :� �L(� ��( ��5�� ���� 9,� , ����S '��� ���� �� ���N^ F�(��L!� ')�� �(�N��$ \�!�
���;� '�(�,: J��P$ �� ������� �� \@�X�
5. (��� � ��< B��P� ��$����. \6 '��� ��"��� , h(�. ��(� ��,� �!�C� J(� ��
;� ,� ����& +��� ��� �� �� ���N��� '��,:�� �� �]��� )�� '��:" . 9,�;� v�V�N� \��� \6�,�: ��( �� #��� W��6 +��� \S��6 W; +��,� �
;� >�.�^�N� +�� ��' " +�� uN��i� ,� +� ���� ��$����. \6'����S J�5�� �4N �� �� J��� '�� v�� k��V�.� , #��� B��P� ����,
�� �,��<� J(���� �� \6 v�V�N� W(�;N �� , ���N^ F�(��L!� /.�$ +" ������ . �)�� W&�. �\@�X� j�N �� F�(��L!� +��� ��E��, a�& �J�(�� '�D0
�uN��i� #��@ �� #��� W��6 W���S��$����. \6 W���S B��P� ���;� ���S '��(: ���P$ +���N �|�� W���S ��(�w5 , '� �=X@ '�� #���
W���S , #��� ����& +��� �� :� _�V� #�; :� ��� �� +��.����� �� 9,� J(� '�;�(I� . �� hN�� �� ���0�� a�& +��$ �� ��N" �� � �$ ��
���(" ��� W5�� �4N �� ��S �( I�N +��� �5�|� ����: J(� �� �� W���S J(����� �� F�(��L!�.
KL���[1] Sofge D, G.Chinag, Design, implementation and cooperative coevolution of autonomous/teleported control system for a serpentine robotic manipulator. [2] Nakamura, Y., Advanced robotics redundancy and rptimisation, Addison-Wesley Pub. Company, 1991, Reading. [3] Ma S, Hirose S., Nenchev D. N., Improving local torque optimization techniques for redundant mechanisms, Journal of Robotic Systems, Vol. 8, No. 1, pp. 75, 1991. [4] www.voronoi.com and www.snakerobots.com .

���N^ F�(��L!� /.�$ )�� '��:" � �� �� ���� ���N��� '��,:�� ����& +��� ���;� , B��P� ��$����. \6 '��� �(� 9,� �]��� �(�X@ \�!� _�. ���N:��� ����5 73
Journal of Control, 2008, V.2, N.1 ������ ��1387 � �2 ����� �1
[5] Sastry S and Kohn M, Milli Robotics for remote minimally invasive surgery, Robotics and Automation systems, 1997. [6] Paljug R , Ohm T and Hayati S, The JPL serpentine robot : a 12 DOF system for inspection ,IEEE International Conference on Robotics and Automation, ,1995. [7] Paap k .l, Christaller T and Kirchner F, A robot snake to inspect broken building , IEEE Int,Conf on Intelligent Robots and systems, 2000. [8] Wolf A, Brown H.B, Casciola R, Costa A, Shammas E and Choset H , A mobile hyper redundant mechanism for search and rescue tasks ,International Conference on Intelligent Robots and Systems, Las Vegas , Nevada, 2003.
[9] Gravange A and Woodfine R, mine-sniffing robotic snakes and eels, IEEE Int Conf on Robotics and Automation, 2000. [10] Suthakorn J, Chirikjian G S, A new inverse kinematic algorithm for binary manipulators with many actuators, Advanced Robotics, Vol. 15, No. 2, pp. 225– 244 2001 [11] Fromherz M P J, Hogg Tad, Shang Y, Jackson W B, Towards constraint-based actuation allocation for hyper-redundant manipulators, Published in IJCAI-01Workshop on Modelling and Solving Problems with Constraints, Aug. 2001. [12] Deb.k , An introduction to genetic















![b`n"D [+,,),R,∆# gjr`m^gjn`_n^\g`#`)b)]`io*nom\dbco$ ^)"D (+,,],R,∆# pkk`m^gjn`_n^\g`#`)b)kpm`*dhkpm`$ _)"D [+,,],R,∆# #ojo\ggt$^gjn`_n^\g`#`)b)apgg*`hkot$ Oc`n^\g ...](https://static.fdocuments.us/doc/165x107/611814a3ca4296519c537895/bn-d-ra-gjrmgjnngbionomdbco-d-ra.jpg)