Jeff Shelton 24 February 2015 · Jeff Shelton – 1024 February 2015 OUT 𝑉 = 1 1+ 𝑅 𝑅...
46
Jeff Shelton – 24 February 2015 1
Transcript of Jeff Shelton 24 February 2015 · Jeff Shelton – 1024 February 2015 OUT 𝑉 = 1 1+ 𝑅 𝑅...

Jeff Shelton – 24 February 2015
1

Jeff Shelton – 24 February 2015
2

Jeff Shelton – 24 February 2015 3

Jeff Shelton – 24 February 2015
4

Jeff Shelton – 24 February 2015
vs.
5

Jeff Shelton – 24 February 2015
6

Jeff Shelton – 24 February 2015
7

Jeff Shelton – 24 February 2015
H W G
VS VW
8

Jeff Shelton – 24 February 2015
𝑅𝑃 = 𝑅1 + 𝑅2 𝑅2 = 𝑥𝑅𝑃 𝑅1 = 1 − 𝑥 𝑅𝑃 𝑅𝑃
𝑅1 𝑅2
VS Vout +
–
9

Jeff Shelton – 24 February 2015
OUT
𝑉𝑂𝑈𝑇 =1
1 +𝑅𝑃𝑅𝐿
𝑥 1 − 𝑥 𝑥𝑉𝑠
Maximum nonlinearity occurs at: 𝑥 ≈2
3
Max nonlinearity: =400
27
𝑅𝑃
𝑅𝐿% f.s.d.
10

Jeff Shelton – 24 February 2015
•
•
•
•
•
•
•
•
•
11

Jeff Shelton – 24 February 2015
•
•
•
•
•
•
12

Jeff Shelton – 24 February 2015
Absolute Encoding
Incremental Encoding
13

Jeff Shelton – 24 February 2015
Ch. 0
Ch. 1
Ch. 2
14

Jeff Shelton – 24 February 2015
90∘
Channel A
Channel B
Index
15

Jeff Shelton – 24 February 2015
•
•
•
Light Source
Moving Grate
Light Receiver
Collimated Beam
16

Jeff Shelton – 24 February 2015
Channel A
Channel B
4X
2X
1X
17

Jeff Shelton – 24 February 2015 18

Jeff Shelton – 24 February 2015
19

Jeff Shelton – 24 February 2015
20

Jeff Shelton – 24 February 2015
21

Jeff Shelton – 24 February 2015
Channel A
Channel B
22

Jeff Shelton – 24 February 2015
23
Rotary Encoder Linear Encoder

Jeff Shelton – 24 February 2015 24

Jeff Shelton – 24 February 2015
Target
Retro-reflector
Beam Splitter
Interferometer Receiver &
Signal Processing
Collimated
Laser Beam
Electrical Signal
Quadrature Output
25

Jeff Shelton – 24 February 2015
𝑉𝑇 = 𝐾𝐸𝑀𝐹 ⋅ 𝜔 = 𝐾𝑉 ⋅ 𝜔
26

Jeff Shelton – 24 February 2015
27

Jeff Shelton – 24 February 2015
Time (sec)
Vel
oci
ty (
m/s
)
28

Jeff Shelton – 24 February 2015
29

Jeff Shelton – 24 February 2015
30

Jeff Shelton – 24 February 2015
31

Jeff Shelton – 24 February 2015
•
•
•
32

Jeff Shelton – 24 February 2015
33

Jeff Shelton – 24 February 2015 34

Jeff Shelton – 24 February 2015
Clear Output Latch
Reset Counter Set Timer
Start Timer Running
Read Counter (Load Output Latch)
Timer not done
Timer done
START
35

Jeff Shelton – 24 February 2015
Timer not done and
no overflow
Timer done and no
overflow
Clear Output Latch
Reset Counter Set Timer
Start Timer
Read Counter (Load Output Latch)
Running
START
Set Output Latch to
Max Counter overflow
36

Jeff Shelton – 24 February 2015
37

Jeff Shelton – 24 February 2015
•
•
•
•
38

Jeff Shelton – 24 February 2015
•
•
•
•
•
•
39

Jeff Shelton – 24 February 2015
•
40

Jeff Shelton – 24 February 2015
𝐸𝑖 = sin 𝜔𝑡
𝑉𝐴= 𝐸𝑖 ⋅ sin 𝜃
𝑉𝐶= 𝐸𝑖 ⋅ cos 𝜃
41

Jeff Shelton – 24 February 2015
42

Jeff Shelton – 24 February 2015
•
•
𝑉𝐴 = sin 𝜃 ⋅ sin 𝜔𝑡
𝑉𝐵 = cos 𝜃 ⋅ sin 𝜔𝑡
Resolver
𝑉𝑋 = sin 𝜃 ⋅ sin 𝜔𝑡
𝑉𝑌 = cos 𝜃 + 120° ⋅ sin 𝜔𝑡
𝑉𝑍 = cos 𝜃 − 120° ⋅ sin 𝜔𝑡
Synchro
43

Jeff Shelton – 24 February 2015
𝑉𝐴 = cos 𝜙 ⋅ sin 𝜃 ⋅ sin 𝜔𝑡 𝑉𝐵 = sin 𝜙 ⋅ cos 𝜃 ⋅ sin 𝜔𝑡
sin 𝜃 − 𝜙 ⋅ sin 𝜔𝑡
44
sin 𝜃 − 𝜙
sin 𝜔𝑡

Jeff Shelton – 24 February 2015 45
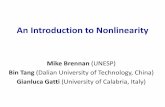
Resolver Encoder
Cost Higher Lower
Implementation Complex Simple
Shock Resistance Rugged Limited
Inertia High Low
Weight Heavy Lighter
Output Analog Analog or Digital
Noise Immunity Sensitive Robust
Accuracy 4—40 arc minutes 0.25—6 arc minutes
Angle Measurement Absolute Absolute or Incremental

Jeff Shelton – 24 February 2015
46