j Exp Biol 1990 Dudley 19 52

of 34
-
Upload
thehighlife1080 -
Category
Documents
-
view
221 -
download
0
Transcript of j Exp Biol 1990 Dudley 19 52
-
8/13/2019 j Exp Biol 1990 Dudley 19 52
1/34
J. exp. B iol. 148, 19-52(1990) 1 9PrintedinGreat Britain The Company ofBiologists Limited1990
MECHANICS OF FORWARD FLIGHT IN BUMBLEBEESI. KINEMATICS AND MORPHOLOGY
B Y R . D U D LEY * AND C. P . ELLINGTONDepartment of Zoology, University of Cam bridge, Downing Street,Cambridge CB2 3EJ, United Kingdom
Accepted 2 June 1989
SummaryUsing high-speed cinem atography, bum blebee s in free flight were filmed over arange of forward airspeeds. A detailed description of the wing tip and bodykinematics was obtained from a three-dimensional reconstruction of the two-dimensional film image. A technique for determining quantitatively the angle ofattack of the wing was developed. Kinematic parameters found to vary consist-ently with airspeed were body angle, stroke plane angle, geometrical angle ofattack, and rotational angles of the wings at the ends of half-strokes. Results of amo rpholog ical analysis of the wings and bo dies of tho se insects filmed in free flightare presented for use in later calculations of the lift and power requirements offorward flight.
IntroductionAn accurate description of the wing and body kinematics of flying insects isfundamental to any analysis of the associated mechanics and aerodynamics offorward flight. Traditionally, studies of insect flight kinematics have beenperformed on tethered insects (Hollick, 1940; Jensen, 1956; Weis-Fogh, 1956;Nachtigall, 1966; Vogel, 1966, 1967; Zarnack, 1972). Kinematic parametersinvestigated in these studies have included w ingbeat frequency, motion of the wingtip and wing profile. Weis-Fogh (1973) initiated a new era in animal flight researchwith his study of free hovering flight in insects, and this method of analysis hassince become increasingly sophisticated (Ellington, 1980, 1984ft). Detailed ana-lyses of wingbeat kinematics and wake geometries of free-flying bats and birdshave also become increasingly popular (e.g. Norberg, 1976; Rayner et al. 1986;Spedding, 1986, 1987). Particular attention has been paid in these studies to thevariation of kinematic pa ram ete rs with forward airspeed, in order to deter m ine
the means by which aerodynamic force is produced and its direction andmagnitude regulated.Comparable analysis of the forward flight of insects has not been possible untilrecently. Th e absence of detailed kinem atic studies of free forward flight in insectsPresent address: Smithsonian Tropical Research Institute, APO Miami, FL 34002, USA.
Key words:flight,kinematics, bumblebees.
-
8/13/2019 j Exp Biol 1990 Dudley 19 52
2/34
2 0 R . D U D L E Y A N D C . P . E L L I N G T O Ncan be attributed to the technical difficulties of eliciting controlled, properlyoriented flight for significant periods of time. The alternative method, tethering,introd uce s a variety of behavioral and m echanical constraints (Elling ton, 19846); itis unknown how similar the wing kinematics observed in tethered insects are tothose in free flight. Only for one insect species, the migratory locust, are therekinematic data available for a direct comparison of free and tethered flight. Bakeret al. (1981) showed that the wingbeat frequency of locusts in free flight wastypically16 % greater than that of tethered insects flying at some preferred speedand that, on average, speeds in free flight were some 39% greater than preferredspee ds in teth ere d flight. It was also shown by Kutsch & Stevenson (1981) that thewingbeat frequency of tethered locusts was significantly less than that ofindividuals in free flight, for both juvenile and mature individuals.It is clear that kinematic studies of insects in free flight avoid all the potentiallimitations imposed by tethering. The best method for controlling free flight ininsects is probably to rely upon their optomotor responses; through a judicious,perhaps fortuitous, choice of lighting and moving optical cues, it should bepossible to elicit controlled flight (e.g. David, 1979). The present paper describesthe experimental methodology and means of analysis used to determine the wingand body kinematics of bumblebees in free forward flight. An optomotor systemconsisting of moving stripes and fixed lighting is described wh ereby the orie ntationand genera l quality of flight in insects can be contro lled. High-speed cine" filmswere taken of bumblebees flying over a range of forward airspeeds. A projectionanalysis was used to reconstruct the three-dimensional position of the wing tip andthe body from single-view cine' frames. T he va riation of kinematic pa ram eter s withforward airspeed was examined in detail. A detailed morphological analysis wasalso carried out for those bumblebees filmed in free flight to provide data forcalculations of lift and power requirements (Dudley & Ellington, 1990).A new method is presented for the analysis of the span-wise angle of attack ofthe wings. This method, based upon the bilateral symmetry of wing motions,allows determination from a single view of the three-dimensional position ofarbitrarily chosen points along the wing margin. A detailed description of theorientation of the wing through the wingbeat and at different airspeeds is therebyobtained. Such an approach is computationally and logistically simpler than moretraditional m ethods of stereop hotog ram m etry, and is mo re generally applicable tothree-dimensional reconstruction from a single view of the position and orien-tation of symmetrically paired animal appendages. This technique is used tomeasure for flying bumblebees the angle of attack of the wing through thewingbeat, and to examine in detail the variation of wing orientation with forwardairspeed.
Materials and methodsInsects
Bumblebees, because of their size, general availability in the summer months,
-
8/13/2019 j Exp Biol 1990 Dudley 19 52
3/34
Kinematicsofbumblebee flight 21and noted ability to hover and to sustain forward flight, were chosen as the modelinsect for thepresent study. Allexperimen tal work in thepresent pape r wasperformed on thebuff-tailed bum bleb ee Bombus terrestris (L.)sensu Alford(1975), and all future text references to bumblebees refer tothis spe cies. Insectswere collected in theCam bridge University Botanic G arde n andwe re usuallyfihned withinaday. They were maintained in large well-ventilated cages and werefed a dilute mixture ofhoney andwater (5 0% v/v ). Only themost vigorousindividuals were selected for filming.
FilmingTh e wind tunn el used in all experim ents was the same open-jet tunn el as used by
Weis-Fogh & Jensen (1956), wherein a detailed description ofthe tunnel designmay be found. The original motor was replaced withavariable-speed d.c. mo torfor better speed control.Abead thermistor anem om eter (Prosser AVM 502) wasused to determine velocity profiles in theregion of the w orking section whereinsects were fihned. Mean air velocities at each ofsixdifferent po ints, all located inthe general region ofthe work ing section w here flightwasfilmed, we re foundtypically to bewithin 1% ofthe designated free-stream valu e, over arangeof1-5ms 1 . At any one point, measured velocity fluctuations were typically within3 % ofthe m ean va lue, with a dominant frequency inthe range 6-10 Hz at anairspeedof3ms 1.Th e working section of the open -jet tunne l was enclosed by a cylindrical sectionof 2mm acetate sheet (Fig. 1A ); theenclosed working section was 280 mminlength and140mm in diame ter. Inse cts were kept within the wo rking section byacircular piece of coarse-weave fabricatthe down stream en d, and byafine plasticnetting fitted betwee n the front of the working section and the opening of the windtunnel upstream.A60 sector of the acetate sheet was removed and replaced witha75mmx75 mm window of plate glass to reduce optical distortion infilming.Airvelocity measurements with and without the window inplace suggested thatitseffect on the airflow in the general regionofflight was negligible.Controlling thefree flight of the insects provedto bedifficult. Avarietyof
8WultraviolettubeWind tunnel " sr igh-speed\ \ \
camera \ \ \ ^S
, Front surface\ \ mirror
Workingsection Meshfrv Quartz-iodine^ lights
Rotatingdrums
Fig. 1. (A) La teral view of the working section and camera arrangement. (B) Verticalview of the working section. The arrow indicates the direction of air flow.
-
8/13/2019 j Exp Biol 1990 Dudley 19 52
4/34
2 2 R . D U D L E Y A N D C . P . E L L I N G T O Nschemes was experimented with, and the most successful method to date ispresented here: ultraviolet light proved to be a strong stimulus for initiating andsustaining flight, and a moving stripe pattern provided directional orientation. An8 W Atlas ultravio let fluorescent light was positioned above and p erpend icular tothe working section; most of the light was masked out such that only a smallcentral section (app roximately3 cmin length) was visible (Fig. IB ). Ab ove and oneither side of the working section were positioned two rotating 'barber pole' drums60mm in diameter and160mm long. The exterior of each drum was covered withalternating black and white stripes at a pitch of 45. The drum axles were linkedmechanically such that the direction of stripe motion was the same for each drum.The drums were driven at 1-3 revss" 1by a small d.c. motor; the speed of rotationwas controlled remotely by the observer. Room temperature at the time of filmingwas always within 3 of25C.
A Hyspeed 16mm cine" came ra [John H adlan d (P .I. ), U K ], fitted with a 75 mmBolex lens at f/8, was used for all high-speed photography. The camera wasopera ted at 5000 frames s - 1 , which, for a typical bum bleb ee w ingbeat frequency of150H z, resulted in approximately 33 film frames per w ingbe at. The cam eraarrangement can be seen in Fig. 1A. The insect image was reflected to the cameraby a front surface mirror, which was positioned above and to the right of theworking section. By virtue of the mirror tilt, the angle between the object planeand horizontal was 70, while the angle betw een the longitudinal axis of the tunne land the optical axis of the camera, when projected onto a horizontal plane, was25.Backlighting of the insect provided a silhouette image for filming: sufficientcontrast could not be obtained with front lighting, even when using 5 kW ofillumination. Two lkW quartz-iodine lights were placed approximately 5cmbehind and underneath the far side of the working section (Fig. 1A). A sheet oftranslucent drafting film taped around the bottom of the working section acted as alight diffuser, giving a uniformly lit ba ckgro und against which the silhouette imageof the flying insect could be seen.The high-speed camera required approximately 0-5 s to reach a running speed of5000 frames s" 1 . To prevent film wastage, therefore, a 15-3m film leader wasspliced to the length of film to be exposed, the latter usually being 3-7min lengthand representing approximately 01s of actual filming. A relay box turned on thecamera lights approximately 0-5safter the camera was triggered, at the same timethat the beginning of the film to be exposed passed through the shuttermechanism. Any potentially adverse effects of the intense lighting on flightbehavior were thus avoided in the 0-5s prior to actual film exposure.With the wind tunnel already up to speed, an insect was introduced into theworking section. The drums were set rotating, and the ultraviolet light was thenflickered on and off until the insect began to fly, at which point the light was lefton. Several seconds of non-oriented and unsteady flight occurred before the insect'locked on' to the moving stripes and began to fly steadily in the filming area of theworking section. Flight duration ranged from less than Is to 1-5min; a detailed
-
8/13/2019 j Exp Biol 1990 Dudley 19 52
5/34
Kinematics of bumblebee flight 23account of flight performance is given below in the Results section. After steadyflight had been attained and the insect was positioned properly for filming, thehigh-speed camera was triggered. Immediately after the film had finished(approx imately 0-75 s), the cam era lights, ultraviolet light and ro tating dru ms w ereall turn ed off. While the insect walked about inside the work ing section , a new filmwas put into the came ra, and then the entire process was rep eate d. For a particularinsect flying at one wind velocity, three filming attempts were usually necessary toguarantee at least one successful film in which the insect was properly oriented andthe focus sufficient for analysis. Failure to obtain a good film was typically due tothe un pred ictable de pa rtu re of the insect from the filming area in the 0-5 s beforethe camera reached full running speed.
Insects were filmed flying at th ree wind velocities ( 1 , 2-5, and 4-5 m s " 1 ), andwhile hovering with the wind tunnel turned off. A video camera was also used torecord all filming ses sions, to identify those films in which the insect was in the fieldof view during filming, and also to ensure for films of hovering flight that in theseconds prior to actual filming the insect was in normal unaccelerated flight. Theflight speeds used in this study correspond approximately to those typically foundin nature. For example, Heinrich (1979) states that bumblebees fly to and fromforaging sites at 3-5ms" 1 , while J. H. Mayberry (personal communication) hasfound that bumblebees foraging between artificial flowers spaced less than lmapart fly at speeds of less than 2 m s " 1 .Towards the end of filming sessions, insects displayed an increasing reluctanceto fly at the higher velocities, but were almost always capable of hovering beneaththe ultraviolet light. Filming was thus begun with flight at 4-5 m s ~ \ and continue dwith successively lower velocities, culminating in the filming of hovering flight. Anentire film sequence of flights over the indicated range of velocities could beobtaine d in less than l h , given a cooperative anim al. Insects were weighed bothbefore and after a filming sequence. Weight loss over the filming period wastypically less than 10% of the initial value, and therefore the mean of the twomeasurements was taken to be representative of the body mass during filmedflight.Films were developed at25 C in a 1:9 solution of Ilford PQ developer and werefixed in a 1:3 solution of FX-Universal fixer. All films were analyzed using theprojection equipment described by Ellington (19846). A 12bit A - D converter(CUBAN-12, Control Universal Ltd) was used to interface the digitizer to a ModelB BB C microcom puter with a 6502 second processor. C om puter programs for thekinematic analysis were written in HI-BASIC, an extended version of BBCBASIC.
Wing tip kinematics and body angleThe analysis of wing tip kinematics was generally the same as that used byEllington (19846), to which the reader is referred for further details. To analyzethe motion of the wing tip through the course of a wingbeat, it was necessary todigitize for each film frame three points on the film image: the near wing base Pi
-
8/13/2019 j Exp Biol 1990 Dudley 19 52
6/34
24 R. DUD LEY AND C. P . ELLINGTON
Fig. 2. Mutually orthogonal coordinate systems used in the kinem atic analysis,modified from Ellington (19Mb). (A) The filming coordinate system (x*,y*,z*), withpoints P1-P4 used in the kinematic analysis, K, camera tilt. (B) The (x,y,z) coordinatesystem. (C) The (x',y',z') coordinate system fixed in the insect body. (D) Method fordetermining a line parallel to the plane of symmetry. The line (ej,g) is parallel to theplane.
(which was always the base of the left wing of the insect), the corresponding wingtip P 2 , and the opposite or far wing tip P 3 (Fig. 2). Additional points of interestwhich will be considered later include the anterior tip of the body P 4 , the far wingbase P 5 , and the point of intersection of the wing base axis with the medianlongitudinal plane of the body, P 6.The image reconstruction technique relates the filming coordinate system to acoordinate system fixed in the insect body. Wing motions are presumed to bebilaterally symmetrical, and longitudinal bending of the wing is assumed to beinsignificant. Initially, coo rdinates of the points of interest are given in the cam era-based filming system (x*,y*,z*), in which they* axis is horizontal and thex*axispoin ts along the optical axis of the camera (Fig. 2A ). Coordin ates are thentransformed to the (x,y,z) system by rotating the filming coo rdinate system aboutthey* axis (coincident with they axis) until thex* axis becomes the horizontal x
-
8/13/2019 j Exp Biol 1990 Dudley 19 52
7/34
Kinematics of bumblebee flight 25axis, with the z axis vertical (Fig. 2B ). T he (x,y,z) system is the same asEllington's, who used a horizontal optical axis. Given a camera tilt above thehorizontal of K, coordinates in the (x*,y*,z*) system can be expressed in the(x,y,z) system as follows:
x = X*COS(K) z*sin(*r), (1)2)3)
= y \z= jc*sin(*r) + Z*COS(KT) .
At this point, the analysis of wing tip kinematics then follows the previouslypublished analysis: coordinates in the (x,y,z) system are transformed to the(x',y',z') system fixed in the insect bo dy , such tha t thex' axis remains horizontaland parallel to the plane of symmetry, they' axis is para llel to a line join ing thewing tips, and the z' axis is not necessarily vertical (Fig. 2C). The coordinates ofany point in the(x,y,z) system can be conv erted to(x',y',z') coordinates by mean sof a matrix of direction cosines (see below).
By virtue of the symmetry condition, there exists for any point P 7 on the nearwing margin a corresponding point P 8 on the opposite wing margin (Fig. 3). Thiscan be expressed in the (x',y',z') coo rdinate system by mea ns of the followingidentities:x'i = x's, (4)yj=-y's-B, (5)ii = z'8, (6)
whereBis the wing base sep aration. Similarly, for th e ne ar wing tip P2and the farwing tip P 3 :x 2 = x'-i, ( 7 )yi = -y'3-B, (8)Z2 = Z'3. (9)The untransformed coordinates of the far wing base P 5 are, of course, (0,B,0).
- y
Fig. 3. In the (x',y',z') coordinate system, an arbitrary point P7on the near wing andits corresponding point Pg on the opposite wing. P2 is the near wing tip andP3 the farwing tip; P5 is the opposite wing base.
-
8/13/2019 j Exp Biol 1990 Dudley 19 52
8/34
-
8/13/2019 j Exp Biol 1990 Dudley 19 52
9/34
Kinematics of bumblebee flight 27defined by spherical coordinates, the positional angle the free body angle, is given in degrees. / and /1 are the distances of thecenter of mass from the anterior tip of the body and the wing base axis,respectively, divided by body length. The value of o is determined from 6 byscaling appropriately by the actual wing and body lengths and the maximumprojected wing length of the sequence. Knowledge of the distance o permits acalculation of thex* coordinate of P4 :
x = [o2- (y - ytf - (zt ~Zt)2]1/2 , (15)with the sign determined by the observer. Points P 4and P6 were then transformed
-
8/13/2019 j Exp Biol 1990 Dudley 19 52
10/34
2 8 R . D U D L E Y A N D C . P . E L L I N G T O Nsuccessively to the(x,y,z) system and to the (V ,y ' ,z') system. The body anglex isthen given by:
X= t a n -x [ ( z ; - z'6)/(x'4 - x'6)]+ X, (16)whereNeglect of perspe ctive effects in the re construction of the wing position from thefilm image introduces errors in the calculated spatial angles of the wing tip, andadditionally results in a tilt of the assumed horizontal plane from the truehorizontal (Ellington, 19846). To determine the magnitude of these effects, it isnecessary to know the horizontal coverage Wof the film image and the distance Yfrom the object plane to the optical center of the lens. The quantities W and Y
were about 5 and 80 wing lengths, respectively, for a typical insect in the filmingarrangements described above. Given these values, the maximum error in thereconstru cted spatial angles of the wing is calculated to b e approxima tely 0-5, andthe angular tilt between the horizontal plane, based on the image projection andtrue horizontal, less than 1.Span-wise angle of attack
For a particular frame of a wingbeat sequence previously analyzed for wing tipkinematics, the three-dimensional configuration of the wing margins was deter-mined as follows. Initially, the wing margins were digitized from the film imageand stored in the computer. Thex* coordinates of all points on the margins werethen calculated, and all coordinates in the filming coordinate system weretransformed first to the (x,y,z) coordinate system and then to the insect coordin atesystem (x',y',z'). Finally, two rotations of the wing such tha t the longitudinal axisof the wing was coincident with the x' axis permitted the determination of theendpoin ts of a series of chords equally spaced along the wing span. When the wingwas rotated back to its original position, these chords were then used to calculatethe chord angle relative to horizontal at span-wise locations.The span-wise angle of attack of wing chords was determined as follows. Thenear wing base Pi was first digitized, and served as the origin for all pointssubsequently entered. The near and far wing tips P 2and P3were then digitized, aswas the far w ing base P 5 , if it was visible. Points w ere then enter ed along the w ingmarg ins, from wing tip to wing base, for each of fourcases:near leading edge , neartrailing edge, far leading edge, and far trailing edge. The maximum projectedlength R', as de term ined for the sequence by the previous wing tip analysis, wasused to normalize all coordinates. Thex* coordinate of the near wing tip P2 wasalso determined from the maximum projected wing length.From the film image, the y* andz*coordinates of any point P7on the near wingmargin are known. They*andz*coordinates of the corresponding point P8on th eopposite margin are, in general, unknown. It is readily apparent, however, thatthe line connecting these two points must be parallel to the line connecting thewing tips P 2 and P3 , given the assumption of bilateral symmetry of wing motions(see Fig. 3). In any two-dimensional projection the slopes of the line connecting
-
8/13/2019 j Exp Biol 1990 Dudley 19 52
11/34
Kinematics of bumblebee flight 29P 7and P8is therefo re equal to the slope of the line connecting the wing tips. In the(x*,y*,z*) system of the film im age , they* and z* coordinates of the point P8canbe found from the intersection w ith the far wing of a line with slope 5 passingthrough point P 7 .For each point P 7 on the near leading or near trailing edge, therefore, theequation of a line with slope s passing through that point was determined. Thepoint of intersection of this line with the far leading or far trailing edge,respectively, was then determined as follows. The opposite wing margin wasrepresented by a series of line segments connecting consecutive points enteredalong the wing margin, the last point being the far wing base, or the last enteredpoint along the w ing margin , if the far wing base w as not v isible. The slope and thez*-intercept of the lines represented by each line segment were calculated.Beginning at the wing tip, they* value of the point of intersection of the line withslopespassing through P7and each consecutive line segment on the opposite wingmargin was determ ined . If this value ofy* was interm edia te to the two values of y*of the points denning the line segment in question, this indicated a possible pointof intersection P 8 , with zg being determined from the equation of the lineconnecting the two endpoints of the line segment. This procedure was carried outfor each consecutive line segment on the opposite wing margin. For a particularpoint on the near wing margin, there were occasionally multiple points ofintersection with the opposite wing margin. In these cases, the correspondingpoint Pg was taken to be that point least distant in the y*z* plane from the lastpoint of intersection that was found. This procedure for finding the correspondingpoint on the opposite wing margin was repeated for each point entered on theleading and trailing edges of the near wing.
At this stage, thex*coordinates of both P7and P8 'are unknown; their differencecan, however, be calculated from a knowledge of the direction number a* in the(x*,y*,z*) system as determ ined previously in the analysis of wing tip kinema tics:x% =xl-K1, (17)where Ki is equal to a*(y%y*). Several different methods were developed tocalculatex*,and the most accurate is given here: equating the distance between P3and P 7 to the distance between P2 and P8 , and using equation 17, it is possible tosolve forx*:
x*,= [x$-K2- (Ki -x})2]/2 [K i -x\ + xV[, (18)where K2= y*s- ytf + zt - z\f - (y?- ytf - (tf- z5)2Equation 18 was used to calculate thex* coordinates of each point on the nearwing marg ins. All points on th e nea r leading and near trailing ed ges, as well as thenear wing tip, were then transformed to the (x',y' ,z') system.From the representation of the wing outline in the (x',y',z') system (Fig. 5A ),the wing was then rotated to determine the three-dimensional location of chordsequally spaced along the wing span . This system involves two sets of rotation s fromthe insect coordinate system, such that the longitudinal axis of the wing is
-
8/13/2019 j Exp Biol 1990 Dudley 19 52
12/34
30 R. DU DL EY AND C. P . ELLINGTON
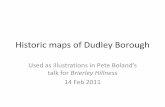
Fig. 5. (A) Representation of a wing in the (x',y',z') coordinate system. Circles arepoints on the leading edge of the wing, squares points on the trailing edge.(B) Rotation of the wing such that the longitudinal wing axis is coincident with thex'axis. One wing chord is shown, with endpoints Pi and P, on the leading and trailingedge, respectively. (C) Wing in original orientation in the (x',y',z') system, depictingthe angleahof the wing chord in B relative to horizontal. D-G, points on wing edges.
coincident with the x' axis. The points along the leading and trailing edgescorresponding to the chords spaced at 0-li? intervals, where R is wing length,along the wing span were then determined. For each such chord, the two closestdata points D and E along the leading edge and F and G on the trailing edge of thewing were found (Fig. 5B). They' and z' values of the two points of intersection ofthe chord with the leading and trailing edges were then determined by linearinterpolation between the endpoints of the line segments DE and FG, respect-ively. The nine pairs of span-wise points were then retransformed to the (x',y ',z')system.The angle ah of a wing chord relative to the insect's horizontal is thecomplement of the angle between that chord and the axis z' (Fig. 5C). If points P|and P t denote the leading and trailing edge positions of the chord, respectively,this latter angle az> can be found from the following direction cosine:
= {z[- z't)/c, (19)where c is the distance between Pi and P t . Span-wise chord angles relative tohorizontal were therefore determined by first calculating the three-dimensionaldistance between the corresponding points on the leading and trailing edges of thewing, and then solving for each span-wise chord a,*,as given by equation 19. Thechord angle relative to horizontal, ah, is taken to be, in degrees, 9 0 - a ^ , positiveangles referring to the condition when points on the leading edge of the wing areelevated (greater values of z') above points on the trailing edge.Er ro rs in the dete rmination of the span-wise angle of attack w ere investigated bytesting the analysis procedure on outlines of wing pairs drawn on a digital plotter(Hou ston In strum ents D M P-6 ). The outlines were of approximately the same sizeas the magnified film image. The orientation of the insect relative to the viewing
-
8/13/2019 j Exp Biol 1990 Dudley 19 52
13/34
Kinematics of bumblebee flight 31system was approxim ately the same as that in the high-speed filming. The principalvariables were investigated for the possible introduction of errors: positional angleof the wing, span-wise position of the chord, and projected chord length. Figureswere drawn with constant span-wise angle of attack but differing positional anglesof the wing, varying span-wise chord but constant span-wise angle of attack, andvariable angle of attack along a wing of constant chord len gth. Typically 10 poin tswere digitized along each wing margin, and the procedure was repeated five timesto ascertain the precision of the analysis procedure. In general, the computerprogram returned the actual angle of attack to within 5, with values beingrepeatable to within 3. Systematic errors were least when the projected chord wassmallest, and when chord lengths were relatively small. Therefore, no directcorrelation existed between angle of attack or positional angle per se and thesystematic errors associated with measuring the angle of attack. The sensitivity ofthe analysis program to errors in the calculated values of the direction cosines andthe maximum projected wing length was also exam ined. E rro rs of up to 5 % inthese parameters introduced errors in the measurement of angle of attack thatwere within the general limits of the systematic errors imposed by the procedure.
MorphologyTo carry out an aerodynamic and energetic analysis of forward flight, it was
necessary to determine a number of morphological parameters for those insectspreviously filmed. A detailed description of those morphological parametersrelevant to flight has been given in Ellington (1984a). In particular, he has drawnattention to the significance of the moments of wing mass and wing area about thewing base, which reflect the distribution of mass and area along the wing span.Such moments, and their associated radii, are of immediate mechanical signifi-cance and, moreover, serve to characterize quantitatively the shape of the wing.A quasi-steady aerodynamic analysis of hovering flight (Weis-Fogh, 1973) demon-strated that the mean lift force and mean profile power are proportional to thesecond and third moments of wing area, respectively. Inertial forces acting on thewings are proportional to the first moment of mass; the associated radius throughwhich the resultant force acts is the ce ntre of m ass. The second m om ent of mass isequivalent to the moment of inertia, its associated radius being the radius ofgyration. Moments and radii analogous to those of wing mass can also be derivedfor the wing virtual mass, the mass of air accelerated and decelerated by themo tion of the wing. M om ents and radii of mom ents for wing area , mass and virtualmass will figure prominently in later calculations of lift and power requirements.The current morphological study follows for the most part Ellington's previouslypublished methodology, which may be consulted for a more detailed description ofthe techniques and mathematical calculations involved.
The total mass m of the insect was first measu red to 0- 1 mg , and b oth wingpairs were then cut from the body. Wing length R and body length /b weremeasu red to within 0 1 mm using Vernier calipers. The non-dim ensional bodylength lb is given by the ratio of /b to R. The legs were then cut
-
8/13/2019 j Exp Biol 1990 Dudley 19 52
14/34
32 R. DU DLE Y AND C. P . ELLING TONTable 1. Identification (ID number and sex) and general morphological param etersfor the bumblebees filmed for kinematic analysis
l R pwID Sex (mg) (mm) (N m ~2) Ai rfitBB01 F (w ork er) 175 13-2 16-2 6-56 0-40BB02 F (work er) 180 13-7 15-9 6-78 0-37BB03 F (qu een) 595 15-4 35-6 5-78 0-28
Body massmis given in mg, wing lengthR in mm, and wing loadingpw in Nm~2 .Aspect ratioA i. and relative thoracic massrhtare non-dimensional.
from the body, and the thorax was weighed. The ratio of thoracic mass to bodymass is designated mt. For the insects filmed in free flight, gross morphologicalparameters as well as the aspect ratioAl of the wings and the wing loading pw aregiven in Table 1. Th e aspect r atio is the ratio of the wing span squared to the wingarea, and the wing loading is the ratio of body weight to wing area.Body parameters
An entomological pin was put through the two wing bases and supported ateither end such that the wing base axis was horizontal. A 35mm ph otograph wasthen taken of the pinned,body to determine the free body angle Xo,the anglebetween the longitudinal body axis and horizon tal. The b ody was then tap ped andthe period of oscillation about the wing base axis was determined. A 35mmphotograph was also taken of the insect body pinned through the abdomen andsupported horizontally; superimposing this photograph with the previous oneallowed a determination of the center of mass of the body. The distance from thiscenter to the anterior tip of the body, when divided by the body length, isidentified as /, while the quantityli is the distance of the center of mass from thewing base axis, divided by the body length. The moment of inertia of the body 7 babout the wing base axis could be calculated from the period of oscillation and t1,as could the radius of gyration for the moment of inertia l2. The insect body wasthen photographed both parallel and perpendicular to the longitudinal body axis,to determine the maximum projected area of the body in these two orientations(Sfrontai a n d 5 p l a n ). A non-dimensional mean body diameter, d, was calculatedfrom the formula:
d = (4m/npblb3)1/2, (20)where the mean body density pt, was taken to be 1100kgirT
3 (Ellington, 1984a).Morphological parameters for the bodies of those insects filmed in free flight aregiven in Table 2. A discussion of the passive pitching m om ents generated by the airflow about the body can be found in Dudley & Ellington (1990).
Wing parametersOne wing pair was mounted between glass slides and used as a negative in a
-
8/13/2019 j Exp Biol 1990 Dudley 19 52
15/34
Kinematics of bumblebee flight 33Table 2. Bodyparameters for filmed bumblebees
Xo hID /b / h h (degrees) (l (T9kgm2) dBB01BB02BB03
1-411-381-45
0-480-430-53
0-210-210-27
0-280-310-36
57-558-553-6
0-490-583-97
0180-190-25
Freebody anglexois given in degrees, moment of inertia 7bof the body about the wing baseaxis in lCT9kgm2.The non-dimensional parameters are explained in the text.
photographic enlarger to obtain a positive print. Using the same equipment as inthe kinematic analysis, approximately 20 points along the leading and along thetrailing edge of the wing were digitized. A cubic spline function was then fitted toeach wing edge, and values of the wing chordcwere determined for 100 equallyspaced intervals along the wing span. Wing area 5 was calculated, as was anormalized mean wing chord. The first and second moments of wing area 5i andS2were then calculated from:
Sk=2 P V d r , (21)Jofor kequal to 1 and 2, respectively. The variable r is the distance from the wingbase of a strip of wing area dS. The corresponding non-dimensional radii for themoments of wing area, r^S) and ?2{S)were determined from:
hk{S) =Sk/SRk. (22)The mass of the other wing pair was first determined to 1ng; the wing massm^,
includes both wing pairs. A strip weighing technique was then used to determinethe span-wise mass distribution. Consecutive 2mm wide strips were cut from thewing, perpendicular to the longitudinal wing axis, and sequentially from the basalhinge line to the wing tip. The mass of each strip was measured to 0-5 /xgusing aKahn no. 1500 electrobalance. The first(m{) and second (m2) moments of wingmass were calculated from the following formula, for k equalling 1 and 2,respectively:
mk = 2 [Rm'rkdr, (23)Jowhere m' is the mass per unit wing length. The corresponding non-dimensional
radii for the moments of wing mass, ^(m) and f2(m) are given by:rkk(m) = mk/mv/Rk. (24)
Because of weight loss from the wing during the cutting procedure, calculatedvalues ofmk were multiplied by the ratio of the initial wing mass to the sum of the
-
8/13/2019 j Exp Biol 1990 Dudley 19 52
16/34
34 R. DUDLEY AND C. P. ELLINGTONTable3. Non-dimensional wing parametersfor filmed bumblebees
IDBB01BB02BB03
The
him)0-380-350-38
him)0-460-420-45
abbreviationsare
hiS)0-4950-4830-491
defined in
US)0-5540-5400-553
>i v)0-4%0-4730-487
the Appendix.
0-5420-5180-538
111
091207
0-0540-0540-063
rhw000
(%)524732
masses of the individual wing strips (Ellington, 1984a).A mean wing thicknessrelative towing length, h,wascalculated from the formula:
h = mJPwSR , (25)the density of the wing pw taken as 1200 kgm~3, the density of solid cuticle(Wainwright etal.1976).
Mechanically analogousto thewing mass isthewing virtual mass,themassofairset into motionby theaccelerationof awing normalto itschord,as istypicalofthewingsat the end ofhalf-strokes.Thevirtual massof thewing pair,v, isgivenby:
v= 2 f*V 'd r , (26)Jo
where v'is the virtual mass per unit wing length, equal topjur2/4,and p is thedensityof air. A non-dimensional virtual massv can becalculated from:
v= vAL2/2jzpR3 . (27)The firstandsecond momentsofwing virtual massarecalculatedas inequation 23,substitutingv' form'. Thenon-dimensional radiiformomentsofvirtual massaresimilarly calculated using equation 24 and the moments of virtual mass.Non-dimensional wing parameters forfilmed insectsaregiveninTable3.
ResultsGeneral flight performance
Bumblebees in the working section of the tunnel usually took off and flewupwards within secondsof theultraviolet light being turnedon. Thestrengthofthis response couldbevariedbyadjusting thelight intensity.If thestriped drumswerenotrotating, theflightwasquite erratic withno consistent orientation, theinsect frequently flying intothesidesofthe working section. Whenthedrums wererotating, however, insects generally took 1-2sto 'lockon' to themoving stripesand begin steady forward flight.Insuch flight,theinsect rarely moved more thanthree body lengths from some mean position in the working section. Controlofflight was excellent, and only rarely wassteady flight interrupted byperiodsofinstability from whichtheinsect generally recovered within1s.Continuous steadyflights sometimes lasted up to 1-5 min. Surprisingly, no strong correlation wasobserved between therateofrotationof thestriped drumsand theflight velocity
-
8/13/2019 j Exp Biol 1990 Dudley 19 52
17/34
Kinematics of bumblebee flight 35of the insect; flight at 4-5 m s" 1could sometimes be maintained at a very low drumrotation rate. At a particular flight speed, however, it was possible suddenly toincrease the drum speed, and thereby elicit short-term movement of the insectforward in the tunnel. Simply by reversing the apparent stripe motion on thedrums relative to the direction of the wind, it was also possible to inducebackwards flight over the entire speed range. Bumblebees upon occasion exhibitedrem arkab le feats of maneuverability. In one instance a bum blebee w orker too k offbackwards from the back netting of the working section, flew backwards forseveral seconds, then rotated precisely about the vertical axis by 180, and flewforwa rds. Th is feat was accomplished at an airspeed of 4-5 m s " 1 .W hen the lights for filming were tu rne d on , insects generally c ontinue d flying forup to Is before becoming disoriented by the intense lights and subsequentlylanding. Visual observation indicated that flight in the fraction of a second theinsects were actually being filmed was stable, unaccelerated flight. Only thosefilms which show ed properly orien ted flight, as shown by minimal roll from thevertical and yaw from the oncoming wind, were chosen for the kinematic analysis.Three series of bumblebee films were analyzed in detail. Each series consisted offour films of a particular bumbleb ee flying at the three aforem entione d forwardairspeeds and while hovering. For one insect, the bumblebee queen (BB03), nogood quality flight was observed at 4-5 m s"1 , and this speed is there fore om itted inthe results for this insect.Table 4 shows for each analyzed film the roll from vertical and yaw from thetunnel of the insect during the an alyzed wing beat. T he yaw value in hovering flightis , of course, of no particular importance. Also given in Table 4 is the advanceratio,J, at each flight speed. The advance ratio is the ratio of the flight velocity tothe mean flapping velocity of the wings, and can be defined as (Ellington, 1984i>):
/ = V/(2
-
8/13/2019 j Exp Biol 1990 Dudley 19 52
18/34
36 R . D U D L E Y A N D C . P . E L L I N G T O Nwhereis the stroke am plitude,nth e wingbeat frequency, andR the wing length.The flight velocity Vistaken to be th e airspeed in the tunn el, and therefore ignoressmall deviations in the insect's flight speed. An arbitrary limit to J for hoveringflight is 0-1 (Elling ton, 1984b), and for all the hove ring sequences m ovem ent of thewing base was less than that imposed by this limit. Precise determination of thevelocities of insects in hovering flight was not possible because the camera viewprecluded accurate determination of thex' coordinates of points on the body. Itshould be noted that the advance ratio of the bu m blebee queen flying at1m s"1 isless than the value taken to represent hovering flight. Table 4 also includes, forflight at each airspeed, two values of the Reynolds number, one based on the bodylength and forward airspeed, th e other based on the m ean wing chord and the sumof the forward airspeed and the mean flapping velocity at the radius of the secondmoment of wing area. This latter quantity is meant only to give a generalindication of the flow situation , as there is, of course , continuou s variation of theReynolds number both along the wing and during the wingbeat.
Wing tip and body kinematicsFig. 6 shows the variation with airspeed of the body angle%and the stroke planeangle /J. Body angle invariably decreased with forward airspeed; the stroke planeconcomitantly increased, with the angle between the stroke plane and the
longitudinal body axis remaining approximately constant for any particular insect.Fig. 7 shows the variation with airspeed of the following kinem atic pa ram eter s: th eminimum positional angle, , maximum positionalangle, 4>max, stroke amplitude, 4> (= 0m a *-0min), and the wingbeat frequency, n.There was no statistically significant change with airspeed in minimum positional
5040
S 3 020
10
\- ^ \ X(body angle)
0 4 -fi (stroke plane angle)
Airspeed (us" ')Fig. 6. The variation with airspeed of the body angle xand the stroke plane angle p.Symbols as follows: , BB01; A , BB02; , BB03.
-
8/13/2019 j Exp Biol 1990 Dudley 19 52
19/34
Kinematics of bumblebee flight 37
XI00c(st roke ampl i tude)
_ 4>ma* (maximum posit ional angle)
mio (minimum posit ional angle)
181716151413
141218642
24
1 2 3 4 5A i rspeed ( m f 1 )Fig. 7. The variation with airspeed of the wingbeat frequency n, the stroke amplitude3>,the maxim um positional angle
-
8/13/2019 j Exp Biol 1990 Dudley 19 52
20/34
38 R . D U D LEY A N D C . P . ELLINGTONA
.y.v* V-*" ' "n = 155H z
B
% . : ' ' . -' '
n = 145H z
C
n- 152 HzD
/36. .'* ^* 1250 24
>>. V '''/343 . ' * 1 0 3 0 26
-
^ ^1)Ui -00o-Q-
--
0 -
6030
0- 3 0
6030
0- 3 0
6030
0- 3 0
60300
- 3 0
o
1 l ' ' " l 1 1 1 1
1 1 1 1 1
-
.\
' . *1 1 1 1 1
.K ' ' ' '
i i i i 1
-
. . . .-
-
-I
-
-
_
-|-
-1
= 144Hz 'Fig. 8. Wing tip kinematics for the insect BB 01. (A) Hovering; (B) l m s " 1 ;(C)2-5ms~ 1 ; (D) 4-5ms~1. Symbols as follows: n, wingbeat frequency; /S, strokeplane angle;,stroke amplitude;
-
8/13/2019 j Exp Biol 1990 Dudley 19 52
21/34
Kinematics of bumblebee flight 39A
* /. . . t . . = 147 Hz
B
n=132 Hz
C_ ' .
Yn - 132 HzD
.
P1* 1040 24
' ' /S 190 99027
.' .' >' ' f l 3 5 115029
. ' 41 9 5 0 34
on
ina)oilu
- &
0 0-a
a--
6030
0- 3 0
6030
0- 3 0
60300
- 3 0
60300
- 3 0
". "*
i i i i i
** .** "
. -
t 1 1 1 1 1
' .
i i i I
n=143 HzFig. 9. Wing tip kinematics for the insect BB02. (A ) Hovering; (B) l m s(C)2-5m s"1 ; (D)4-5 ins"'. Symbols as in Fig. 8. See text for further details.
dimensional angular velocities were calculated according to Ellington (19846).Root mean square (rms) and cube root mean cube (crmc) values were calculatedfor each wingbeat. No relationship was found between the rms or crmc values andforward airspeed (r typically 0-1, P>0-05). Additionally, no relationship wasfound between forward airspeed and the ratio of the rms value during thedownstroke to that during the upstroke (r=0-21, P > 005). Values of rms andcrmc were only 1-2 % smaller than the values characterizing simple harmonicmotion. Corresponding estimates of quasi-steady aerodynamic forces and meanprofile power are about 5% lower than estimates based on the assumption of
-
8/13/2019 j Exp Biol 1990 Dudley 19 52
22/34
40 R. DU DLE Y AND C. P . ELLINGTON
= 166Hz
/i = 157 Hz
* 130* 2 5 oo
T3Q-
6030
0
0 1 2
-
8/13/2019 j Exp Biol 1990 Dudley 19 52
23/34
Kinematics of bumblebee flight 41
1 3
100
20
- 2
~ oA- O-
5 1ms" 1
a&i
1
a61
o
8
I8
i
i
---
i
100
20
1- lms" 1
~ DA O-
1
1
65n
i
i
oAa
1
1-
A IVo-
1
100
20
_ 4-_
aAo-
5 m s 1
g81
D
2
1
aAO1
1
D
6I
1A68 -o
|
0 0
Fig. 11. Variation with non-dimensional time tof the angle of attack a-relative to thestroke plan e, for the insect BB01. Symbols as follows: , proximal wing section, theme anangleo fwing chords at 017?,0 2i? and 0 37?;A , middle section ,the m ean an gleofwingchords at 0-47?, 0-57? and 0-67?; O, distal section, the mean angle of wing chordsat0-7R,0-87? and 0-97?, where Ris wing length.dorsal downstroke, wing motion is generally confined to the stroke plane at allairspeeds.
Span-wise angle of attackFigs 11-13 depict geometrical angles of attack a relative to the stroke plane as afunction of non-dimensional time for the analyzed bumblebee sequences.Although the initial analysis of angle of attack determined chord angles relative tohorizontal, angles of attack relative to the stroke plane are, in general, moreinformative and are presen ted h ere. U se of the phrase 'angle of attack' hencefo rthrefers to the geometrical angle of attack. Values of a are given for threeconsecutive sections along the wing span, and represent the mean angle of thethree chords comprising each section. Each data point is the mean of threeseparate determinations from a film image of the span-wise angle of attack. Theanalysis program proved to be particularly inaccurate when the margins ofopposite wings were parallel to one another; the determination of corresponding
points on the wing margins was then very sensitive to digitizing errors. Henceframes in the middle of a half-stroke ((p near zero) were difficult to analyze, andmost frames analyzed were near the onset or finish of rotation at the ends of half-strokes. Particularly near the wing base, the resolution of the wing margins waspoor, and angles of attack for the proximal section are therefore not as accurate asthose for the two more distal sections.Angles of attack during both the downstroke and the upstroke tended to
-
8/13/2019 j Exp Biol 1990 Dudley 19 52
24/34
42 R . D U D L E Y A N D C . P . E L L I N G T O Nincrease with increased airspeed, although there were a few exceptions to thistrend. Angles of attack were generally constant to within 15 during the periodsbetween wing rotation, although, particularly during the upstroke, a number ofsequences displayed continuously increasing or continuously decreasing angles ofattack. Du ring the dow nstrok e, bum blebee wings were typically twisted along the
100
20 -
1 1- Hovering
H O A- 8 8 8i i
i
8
I
8 8 i 20 -
20 -
100
20
- 4-5ms3- o
_1
- 'aAo
j8 'o
1 1
I So 8
I
Fig. 12. Variation with non-dimensional time tof the angle of attack a relative to thestroke plane, for the insect BB02. Symbols as in Fig. 11.
0
100
20
i_ Hovering
-
8 i
6a
1 1
-
s - -100
20
- lms
|
aAo
a
I
I
1
8oI
-
81 0
Fig. 13. Variation with non-dimensional time / of the angle of attack a-relative to thestroke plane, for the insect BB03. Symbols as in Fig. 11. There was no flight at4 - 5 m s ~ \
-
8/13/2019 j Exp Biol 1990 Dudley 19 52
25/34
Kinematics of bumblebee flight 43wing span by 10-20, approximately the same amount as is observed under staticconditions. Wings were cambered during the downstroke, and for flight at thehigher airspeeds remained so during the upstroke; the extent of wing camberingduring the upstroke for flight at l m s " 1 and for hovering flight was difficult toascertain.At the ends of half-strokes the wings increased their angle of attack, rotatingabout the longitudinal axis to the angle of attack characteristic of the followinghalf-stroke. Nose-down rotation of the wing is pronation, whereas nose-uprotation is supin ation. Th e exact timing of wing rota tion was difficult to de term ine.Particularly at the end of either pronation or supination the termination of wingrotation was difficult to specify precisely, and the time chosen to indicate the endof wing rotation was that point after which no more elastic recoil was apparent.Similarly, the onset of wing rotation usually occurred between film frames, withconsequent loss of temporal resolution. Measurements of the timing of wingrotations can therefore only be regarded as approximate. The durations ofpronation and supination were approximately equal, averaging about 22 % of thewingbeat period. No relationship was found between forward airspeed and theduration of pronation or supination (r typically 0-35, P>0-05) , and noconsistent relationship was found between the onset of pronation or supinationand the top or bottom, respectively, of the wingbeat (r typically 0-2,P >0-05).
Mean angles of wing rotation at the ends of half-strokes were determined bytaking the mean of the angle of rotation for the nine equally spaced span-wisechords. These angles tended to decrease with increased airspeed for bothp rona t i on ( r= -0 -67 , P
-
8/13/2019 j Exp Biol 1990 Dudley 19 52
26/34
44 R. DU DL EY AND C. P . ELLINGTON
2 3Airspeed (ms"1)Fig. 14. Variation with airspeed of angular velocity of rotation wduring pronation andsupination. Symbols as in Fig. 6; open symbols refer to wing pronation, closed symbolsto wing supination.
generation of thrust to overcome body drag. Thrust is the net horizontalcomponent of the total forces generated by the wing during the wingbeat. Asforward airspeed increases, the magnitude of this horizontal component mustincrease to offset the additional body drag, while the net vertical force producedmust continue to equal the body mass (less any lift on the body). Typically, inflying insects the ratio of drag to body weight is small, even at high airspeeds, andthe resultant force vector tilts forwards only by several degrees. This small changecan be contrasted with the large change in body angle and stroke plane angle overthe same airspeed range. A strong correlation between flight speed and body anglehas been observed in flying insects (Drosophila: Vogel, 1966; Gotz, 1968; David,1979; honeybee: Nachtigall et al. 1971; Esch et al. 1975; bumblebees: presentstudy) and bird s (Bro wn , 1953; G reen ew alt, 1960; Penn ycuick , 1968; Riippell,1971). The angle between the stroke plane and the longitudinal body axis isrelatively constant, and the gradual decrease in body angle with forward airspeedis paralleled by a concomitant increase in stroke plane angle (Ellington, 19846).What are the consequences for the magnitude and direction of aerodynamicforces of the increase in airspeed and the tilt of the stroke plane? By using theparameter of the advance ratio / (= V/2
-
8/13/2019 j Exp Biol 1990 Dudley 19 52
27/34
Kinematics of bumblebee flight 45upstroke, with a concomitant increase in the magnitude of aerodynamic forces,and the downstroke becomes progressively more horizontal while the upstrokebecomes more vertical, with a corresponding change in the direction of theresultant aerodynamic force. These changes are mitigated only partially by theincrease in stroke plane angle, which tends to decrease the velocity differencesbetween the half-strokes. In bats and birds the asymmetry between half-strokescan be enhanced by changes in wing profile which considerably reduce themag nitude of aerodynam ic forces produced during the upstrok e. Insects, however,cannot drastically alter wing shape during the wingbeat, apart from transverseflexion at the ends of half-strokes and changes in wing camber.Because the advance ratio is inversely proportional to the wingbeat frequencyand to the stroke am plitude, variation in these kinematic param eters will alter themagnitude and direction of aerodynamic forces produced by the wings. Anincrease in either the wingbeat frequency or the stroke amplitude while the otherparameter is constant will increase the flapping velocity of the wings, withcon sequ ent changes in the relative velocity experienc ed by a wing section. B ecauselift and drag forces are, in general, proportional to the square of the relativevelocity, the magnitudes of the resulting aerodynamic forces will change dispro-portionately. For this reason, considerable attention has been given to thevariation with airspeed of the wingbeat frequency and the stroke amplitude.
For the buff-tailed bumblebees of the present study, no systematic change inwingbeat frequency with airspeed was observed. For various insects, bats andbirds,a num ber of studies have dem onstrated alternatively an increase, no changeor a decrease in wingbeat frequency as forward airspeed increases. Sotovalta(1947) reported for a hoverfly (Eristalis arbustorum) that wingbeat frequency infree flight increased approximately from 260Hz to275Hz over a flight speed rangeof hovering to5m s"1 , while for Calliphorathe increase w as from 120Hz to210Hzover a range of 0-5 to5m s"1 . In free-flying Locusta migratoria,th ere is a positivecorrelation between flight speed and wingbeat frequency, albeit with considerablescatter in the data (Baker et al. 1981). This relationship has also been found intethered migratory locusts (Gewecke; 1975). In the long-eared batPlecotus aurituswingbeat frequencies showed a small decrease over th e speed range 2 -3 m s " 1(Norberg, 1976), while for the bat Myotis lucifugus wingbeat frequency decreasedfrom approximately 16Hz at a flight speed of 2 m s " 1 to a value of10H z at 7 m s " 1(Schnitzler, 1971). Carpenter (1985) found that in the flying fox Pteropuspoliocephalus the wingbeat frequency decreased by a factor of 2 over the range3 - 7 m s " 1 , and then increased at higher airspeeds. Aldridge (1986) showed for thegreater horseshoe bat Rhinolophus ferrumequinum that wingbeat frequencydecreased with increased airspeed. Tucker (1966) found for a free-flying budgeri-gar Melopsittacus undulatus that wingbeat frequency varied by less than6 % fromthe mean value over a speed range 5-9ms" 1 , while Schnell (1974) found for themagnificent frigatebird Fregata magnificens no significant correlation betweenflight speed a nd wingb eat frequency over the range 8-1 4 m s" 1 . In a study of flightmechanics of Columba livia, Pennycuick (1968) found a decrease in wingbeat
-
8/13/2019 j Exp Biol 1990 Dudley 19 52
28/34
4 6 R . D U D L E Y A N D C . P . E L L I N G T O Nfrequency as flight speed increased from 7 to13m s"1, followed by a slight increaseat higher airspeeds. A similar pattern was found for the stroke amplitude,although for both kinematic parameters scatter in the data was considerable.McGahan (1973) found no significant correlation between forward airspeed andwingbeat frequency in the Andean condor Vultur gryphus, but it is not clearwhether these measurements were made on the same individuals at differentairspeeds. Butler & Woakes (1980) found no relationship between wingbeatfrequency and airspeed for barnacle geese (Branta leucopsis); wingbeat frequencywas approximately constant over a speed range of 16-24ms" 1 . The variableconsequences of changes in airspeed for the wingbeat frequency of flying animalssuggests, not surprisingly, that considerable diversity exists in the aerodynamicmechanism s used by animals of widely varying shapes and sizes to effect forwardflight.
As with wingbeat frequency, the stroke amplitude of buff-tailed bumblebees infree flight showed no significant change with airspeed. A wide diversity of changesin stroke amplitude with airspeed has been observed in flying animals. Magnan(1934) noted in free-flying insects a general decrease in stroke amplitude withincreased airspeed. Gewecke (1967, 1970, 1974) has documented for tetheredCalliphora, Locusta and the dragonfly Orthetrum a significant decrease in strokeamplitude with increased airspeed. Hollick (1940) noticed in tethered individualsof the fly Muscina stabulans a decrease in stroke amplitude with increasedairspeed, as well as with decreased body inclination relative to horizontal.Urquhart (1960), apparently on the basis of a visual estimate in the field, reportedthat in cruising flight of the monarch butterfly Danaus plexippus the strokeamplitude was only 30, but that the amplitude while in 'speeding flight' increasedto 120. Sotovalta (1947) suggested tha t the stroke amp litude in slow forward flightof the sphingid Sphinx ligustriincreased from the value in hovering flight, withou ta significant change in wingbeat frequency. In the long-eared bat Plecotus auritusthe strok e amplitude while hovering was 120, which decrease d to 91 at a flightspeed of approximately 2 4 m s " 1 (Norberg, 1976). Reviewing these results, it isclear that no consistent relationship between stroke amplitude and airspeed hasbeen observed for flying animals, and perhaps none should be expected, givenagain the morphological diversity of the animals being considered.Given that neither wingbeat frequency nor stroke amplitude vary with airspeedfor flying bumblebees, the mechanism by which changes in body angle and strokeplane angle are effected are not clear. An increase in the mean positional anglewith airspeed will move the center of lift progressively more dorsally, and couldtherefore provide the nose-down pitching moment necessary to tilt the body, andhence the resultant force vector, to the angles characteristic of forward flight(Ellington, 19846). Nose-down pitching moments required from the wings topro du ce the app rop riate bo dy angles are at all airspeeds greater than zero (Dud ley& Ellington, 1989). No such increase in mean positional angle with airspeed wasapparent in this study. It should be noted that pitching moments about the wingbase axis, as predicted by a quasi-steady aerodynamic analysis, are not simply
-
8/13/2019 j Exp Biol 1990 Dudley 19 52
29/34
Kinematics of bumblebee flight 47proportional to the mean positional angle but are also inversely proportional tothe stroke plane angle (Dudley & Ellington, 1990).
The high-speed cinematographic studies described herein of bumblebees in freeflight have revealed no systematic variation with airspeed of wingbeat frequency,stroke amplitude or minimum, mean or maximum positional angle over the rangeof airspeeds from hove ring to 4-5 m s " 1 . Instantaneous values of these kinematicparam eters at any given airspeed we re, however, found for bum blebees to deviateconsiderably from mean values for flights of several minutes. If such temporalvariation in kinematics is typical of insects in free flight, the kinematic parametersobtained from a single high-speed film covering a very short time period may notnecessarily be representative of mean values. Multiple high-speed films of thesame insect flying at a constant airspeed would address this issue.The remaining kinematic parameter to be discussed is the angle of attack of thewing. While drastic changes in wing profile cannot be used to cre ate an asymm etrybetween the downstroke and upstroke, changing the angle of attack of the wingrelative to the stroke plane (Figs 11-13) can be used to control the production ofthrust and, thereby, to regulate forward airspeed. Such changes in the angle ofattack are easily made by altering the extent of wing rotation at the ends of half-strokes (Fig. 14), which may be controlled by the activity of only one muscle ormuscle group involved in rotation. Because wing orientation changes graduallywith airspeed, the increase in asymmetry between the downstroke and upstrokeshould also be grad ual, as will be shown using a quasi-steady a erod yna mic analysisfor bumblebees in free forward flight (Dudley & Ellington, 1990).The hypothesis that asymmetry between the downstroke and upstroke, andhence variable production of thrust, results from changes in wing orientation issupported by considering the direction of forces produced on the wing, asdetermined by the effective angles of incidence. The effective angle of incidence ismeasured from the relative velocity vector, which is the sum of the forward,flapping and induced velocities. Calculations of the effective angles of incidencefor bumblebees in forward flight will be made in the companion paper (Dudley &Ellington, 1990), where it will be shown that effective angles of incidence areindependent of airspeed, and do not change significantly from the downstroke tothe upstroke. Because the stroke plane angle varies with airspeed, therefore, thedirection of forces produced by the downstroke and upstroke must also change as afunction of airspeed. In hovering flight with a horizontal stroke plane, theupstroke and downstroke contribute equally to the production of vertical forces,but as airspeed increases the downstroke contributes progressively more and theupstroke less to sustaining the body weight. At higher airspeeds the upstrokefunctions primarily to generate thrust, which arises from lift forces on the wing.
In conclusion, bu mblebees in forward flight use changes in the angle of attack ofthe wing relative to the stroke plane to generate a force asymmetry between thedownstroke and upstroke, and hence to regulate forward airspeed. Effectiveangles of incidence remain constant du ring the down stroke and up strok e; because
-
8/13/2019 j Exp Biol 1990 Dudley 19 52
30/34
4 8 R . D U D L E Y A N D C . P . E L L I N G T O Nof wing rotation, the sense of wing circulation is reversed. The consequences forforce produc tion are a progressive change in the direction of the lift and d rag , withthe vertical forces increasing in magnitude during the downstroke and thehorizontal forces increasing during the upstroke. The gradual change in wingorientation during the downstroke and upstroke corresponds to the gradualchange in the asymmetry between half-strokes required to offset the additionalbody drag at higher airspeeds.
Appendixa* x* direct ion number of line connecting the wing tips in the
(x*,y*,z*) coord inate systema* M ean value ofa*A Reference area for force coefficientAQ Area of actuator discyR Aspe ct ratioB Wing base separationc* z* direct ion number of line connecting the wing tips in the
(x*,y*,z*) coordin ate sytemc* M ean value of c*c Wing chordC D D ra g coefficientCD M ean dra g coefficientCDjf D ra g coefficient for a flat plate parallel to flowQ>,ind In du ce d dr ag coefficientCb.pro Profile dr ag coefficientC L Lift coefficientCi max M ax im um lift coefficientC L M ea n lift coefficientcl Mean body diam eter/body lengthD DragDb Body dragF To tal force acting on insect bodyF h o r Ho rizon tal force acting on bodyFven Vertical force acting on bod y^vert,d Vertical force produced durin g downst rok eg Grav itatio nal accelerationh Me an wing thickness/w ing length/ M o m e n t of inertia7b M o m e n t of inertia for insect body/ Adva nce ra t io/ Dis tanc e from anterior tip ofbody tocen te r of mass/ body length/i Di sta nce from forewing bas e axis to center of mas s/bo dy lengthl2 Radius ofgyration fo rbod y/b ody length/b Bod y length
-
8/13/2019 j Exp Biol 1990 Dudley 19 52
31/34
Kinematics of bumblebee flight 49/b Body leng th/w ing lengthL LiftLb Lift on the bodym Body massnik The k mo men t of wing mass abo ut the wing baserh t Thoracic mass/bod y massm w Mass of wing pairTYU Wing mass/body massM Pitching mo me nt required to tilt the body to the angle observedin flightMp Passive aerodyn amic pitching mo me ntM q s Pitching mo me nt predicted by a quasi-steady analysisn W ingbeat frequencyo D ista nce from poin t of inte rsec tion of wing bas e axis with sagittalplane to the anterior tip of bodypw Wing loadingF Mechan ical pow er outp utF a c c Power requ ired to accelerate wing mass and virtual mass duringfirst half of a half-strokeF i n d Induced powerP L En dpo int of wing chord on leading edgeF p a r Parasite powerP p r o Profile pow erP t En dp oin t of wing chord on trailing edgeF* Mass-specific mechanical powe r ou tpu tr Rad ial position along wingf r/w ing length?k(m) Non -dimen sional radius of the kth moment of wing massfk(S) Non -dimen sional radius of the kth moment of wing area/V(v) No n-d ime nsional radius of the kth moment of virtual wing massR Wing lengthR' Maximu m projected wing lengthRe Reynolds num bers Slope of line conne cting wingtips5 Wing areaSfromai Fr on ta l area of insect bo dySk Th e A:th moment of wing areaSpiail Plan are a of insect bodyt Timet Non -dimen sional timeU Air speedv Virtu al mass of wing pairi Non-dimensional virtual mass of a wing pairvk The kth moment of virtual massv(r,t) Flapping velocity
-
8/13/2019 j Exp Biol 1990 Dudley 19 52
32/34
50 R. DU DLE Y AND C. P. ELLINGTONV Ri gh t velocityV{ Ind uce d velocity^i.norm No rm al co mp on en t of ind uce d velocityVR(r,t) Relative velocityW Ho rizontal coverage of film imageY Distan ce from object plane to lens centera Angle of attackah Chord angle relative to horizon tal x' axisaz' Angle betw een wing chord and z' axisfi Stroke plane angley Tilt of resu ltan t vector from vertica l6 Arc tan of the ratio of the com ponen ts of the induced velocity andforward airspeed Roll angle of insect% Ae rod yn am ic efficiency6 Angle of elevat ion of the wing with respect to s troke plane
Difference between mean elevational angles of dow ns t roke a n dupst roke
xl Ma xim um difference betw een me an elevationa l angle ofdownst roke a n d ups t roke for a given positional angle
* Cam era t il t abov e horizontalv Kin em atic viscosity of airp Mas s dens ity of airPt, Mas s den sity of insect bodyPw Mass den sity of insect wingcp Positiona l angle of wing in stroke plan e0max M aximu m positio nal angle(pmin Minimum positional angle0 Mean positional angle Stroke amplitudeX Angle betw een longitudinal body axis and horizonta lXef{ Effective bo dy angl eXo Free body angleXI Body angle resulting from passive pitching m om ent sW Angle betw een relative velocity vector and horizontalu> An gular velocity of wing dur ing pron ation and supin ation(D Mean angular velocity/w ingbea t frequency
We are indebted to the late Dr Ken Machin for his irreplaceable advice anddiscussion during th e course of this study. M r Neal Maskell and Mr D ennis Unw inprovided invaluable technical expertise. We thank Dr James Mayberry for helpfuldiscussions. The financial assistance of the Marshall Commission, the SmithsonianTropical Research Institute and the Science and Engineering Research Council isgratefully acknowledged.
-
8/13/2019 j Exp Biol 1990 Dudley 19 52
33/34
Kinematics of bumblebee flight 51References
ALDRIDGE, H. D. J. N. (1986). Kinematics and aerodynamics of the greater horseshoe bat,Rhinolophus ferrumequinum , in horizontal flight at various flight speeds. J. exp. Biol. 126,479-497.ALFORD,D. V. (1975).B umblebees.London: Davis Poynter.BAKER,P. S., GEWECKE,M. &COOTER,R. J. (1981). The natural flight of the migratory locust,LocustamigratoriaL. III. Wing-beat frequency, flight speed, and attitude.J. comp. Physiol.141, 233-237.BROWN,R . H . J. (1953). Theflightofbirds.II. Wing function in relation toflightspeed. /. exp.Biol.30 , 90-103.BUTLER, P. J. & WOAKES, A. J. (1980). Heart rate, respiratory frequency, and wing beatfrequency of free flying barnacle geese,Branta leucopsis. J. exp. Biol.8 5, 213-226.CARPENTER,R. E. (1985). Right physiology offlyingfoxes,P teropus poliocephalus. J. exp. Biol.114, 619-647.DAVID,C. T. (1979). Optomotor control of speed and height by free-flying Drosophila. J. exp.Biol.82, 389-392.DUDLEY, R. &ELLINGTON,C . P. (1990). Mechanics of forward flight in bumblebees, n . Quasi-steady lift and power requirements.J. exp. Biol.148, 53-88.ELLINGTON,C. P. (1980). Vortices and hovering flight. InInstationa'reEffekte anSchwingendenTierflilgeln(ed. W. Nachtigall), pp.64-101.Wiesbaden: Franz Steiner.ELLINGTON, C. P. (1984o). The aerodynamics of hovering insect flight. II. Morphologicalparameters.Phil.Trans. R. Soc. Ser.B 305, 17-40.ELLINGTON, C. P. (19846). The aerodynamics of hovering insect flight. III. Kinematics. Phil.Trans. R. Soc. Ser.B 305, 41-7 8.ESCH,H ., NACHTIGALL,W. &KOGGE,S. N. (1975). Correlations between aerodynamic output,electrical activity in the indirect flight muscles and wing positions of bees flying in aservomechanically controlled wind tunnel.J. comp. Physiol.100, 147-159.GEWECKE,M. (1967). Die Wirkung von Luftstromung auf die Antennen und das Flugverhaltenderblauen Schmeissfliege(Calliphoraerythrocephala). Z. vergl. Physiol.54, 121-164.GEWECKE,M. (1970). An tennae: another wind-sensitive receptor in locusts.N ature,Lond.239,1263-1264.GEWECKE,M. (1974). Role of antennae of the dragonflyOrthetrum cancellatuminflightcontrol.Nature,Lond.249, 584-585.GEWECKE, M. (1975). The influence of the air-current sense organs on the flight behavior ofLocustamigratoria.J. comp. Physiol.103, 79-95.GOTZ, K. G. (1968). Flight control in Drosophila by visual control of motion. Kybernetik4,199-208.GREENEWALT,C. H. (1960).H ummingbirds.New York: Doubleday.HEINRICH,B. (1979).B umblebee Economics.Cambridge: Harvard University Press.HOLLICK,F. S. J. (1940). On theflightof the dipterousflyMuscina stabulansFallen.Phil. Trans.R. Ser.B 230, 357-390.JENSEN,M. (1956). Biology and physics of locust flight. III. The aerodynamics of locust flight.Phil. Trans. R . Soc. Ser.B 239, 511-552.KUTSCH, W. & STEVENSON, P. (1981). Time-correlated flight of juvenile and mature locust:a comparison between free and tethered animals.J.InsectPhysiol.27, 455-459.MCGAHAN,J . (1973). Flapping flight of the And ean condor.J. exp. Biol.58, 239-253.MAGNAN,A. (1934).La Locomotion Chezles Animaux. I.Le Vol des Insectes. Paris: Hermannet Cie.NACHTIGALL, W. (1966). Die Kinematik der Schlagfliigelbewegungen von Dipte ren.Methodische und analytische Grundlagen zur Biophysik des Insektenflugs. Z^.vergl. Physiol.52, 155-211.NACHTIGALL,W., WIDMANN, R. &RENNER,M. (1971). Uber den "ortsfesten" Flug von Bienenin einem Saugkanal.Apidologie2, 271-282.NORBERG,U. M. (1976). Aerodynamics, kinematics, and energetics of horizontal flapping flightin the long-eared batPlecotusauritus. J. exp. Biol.65, 179-212.
-
8/13/2019 j Exp Biol 1990 Dudley 19 52
34/34
52 R. D U D L E Y AND C. P. ELLINGTONPENNYCUICK,C. J. (1968). Power requirements for horizontal flight in the pigeonColumbalivia.J. exp.Biol.49,527-555.RAYNER,J. M. V., JONES,G. &THOMAS,A. (1986). Vortex flow visualizations reveal change in
upstroke function with flight speed in bats.Nature,Lond.321,162-164.ROPPELL,G. (1971). Flugmanover des Gartenrotschwanzes. Z. vergl. Physiol.71, 190-200.SCHNELL,G. D. (1974). Flight speeds and wingbeat frequencies of the magnificent frigatebird.The Auk 91 ,564-570.SCHNITZLER,H.-U. (1971). Fledermause im Windkanal. Z. vergl. Physiol.73,209-221.SOTOVALTA,D. (1947). The flight-tone (wing-stroke frequency) of insects.Ada entomol.fennica.4,1-117.SPEDDING,G. R. (1986). The wake of a jackdaw(Corvus moneduld)in slow flight.J. exp.Biol.125,287-307.SPEDDING,G. R. (1987). The wake of a kestrel(Falco tinnunculus)inflappingflight.J. exp.Biol.
127,59-78.TUCKER,V. A. (1966). Oxygen consumption of aflyingbird.Science154,150-151.URQUHART,F. A. (1960).TheMonarch Butterfly.Toronto: University of Toronto Press.VOGEL,S. (1966). Flight inDrosophila.I. Flight performance of tethered flies.J. exp.Biol. 44,567-578.VOGEL,S. (1967). Flight inDrosophila.II. Variations in stroke parameters and wing contour.J. exp.Biol.46, 383-392.WAINWRIGHT,S. A., BIGGS,W. D., CURREY,J. D.& GOSLINE,J. M. (1976).Mechanical DesigninOrganisms.London: Edward Arnold.WEIS-FOGH,T. (1956). Biology and physics of locust flight. II. Flight performance of the desertlocust(Schistocercagregaria).Phil.Trans. R. Soc. Ser.B239,459-510.WEIS-FOGH, T. (1973). Quick estimates of flight fitness in hovering animals, including novel
mechanisms for lift production.J. exp.Biol.59,169-230.WEIS-FOGH, T. &JENSEN,M. (1956). Biology and physics of locust flight. I. Basic principles ininsects flight. A critical review.Phil.Trans. R. Soc. Ser.B239,415-458.ZARNACK, W. (1972). Flugbiophysik der Wanderheuschrecke (Locustamigratoria L.). I. DieBewegungen der Vorderfliigel. /.comp. Physiol.78, 356-395.