
ISSN: 0975-766X CODEN: IJPTFI Available Online through ... · PDF fileUsing a single...
12
Kumaresan P*et al. /International Journal of Pharmacy & Technology IJPT| Sep-2016 | Vol. 8 | Issue No.3 | 15370-15381 Page 15370 ISSN: 0975-766X CODEN: IJPTFI Available Online through Research Article www.ijptonline.com A LOW COST MULTI-FUNCTIONAL ROBOT PROTOTYPE FOR INTELLIGENT SERVICES Kumaresan P* 1 , Subha S 2 School of Information Technology and Engineering Professors, SITE, VIT University, Vellore. Email: [email protected] Received on 20-07-2016 Accepted on 19-08-2016 Abstract Intelligent service robot development is an important and critical issue for human community applications. Robots have been increasingly integrated into working tasks to replace humans. But as easy it is to get a robot do work for you, the costlier it is to buy it. The project focuses on building a low cost robot which will be an amalgam of few different robots performing different functions as obstacle detection, human body detection, wireless remote controlled robot, accelerometer controlled robot, temperature detection, line following robot, etc. It is basically a multifunctional robot which could be used in various working environments by changing its functional mode according to the users need. It will be a synergistic blend of multiple sensors that could be used for intelligent service robotics. The best feature of this multifunctional robot would be the use of DTMF module which would allow you to control or change the functional modes of the robot by using your mobile even if you are miles away from it. The goal of this work is to build a possible module which could summarize the existing solutions from various fields and combine the cost efficient idea presented here, to head towards the creation of new systems and aim to future research directions. Keywords: Multifunctional robot, DTMF module, obstacle detection, human body detection, accelerometer, temperature detection, line following robot. Introduction Robotics has had a great demand in every field since enormous advancement in technology. But buying individual robots for specific functionalities would be an expensive investment. If there are two robots, one with function of detecting the temperature and informing the farmer, other with the function of irrigating the fields by following a particular path. It would be beneficial for the farmer to buy a robot with the integrated features of detecting temperature and irrigating the fields by following a particular path. Intelligent service robotics needs an advanced
Transcript of ISSN: 0975-766X CODEN: IJPTFI Available Online through ... · PDF fileUsing a single...
Kumaresan P*et al. /International Journal of Pharmacy & Technology
IJPT| Sep-2016 | Vol. 8 | Issue No.3 | 15370-15381 Page 15370
ISSN: 0975-766X
CODEN: IJPTFI
Available Online through Research Article
www.ijptonline.com
A LOW COST MULTI-FUNCTIONAL ROBOT PROTOTYPE FOR INTELLIGENT
SERVICES Kumaresan P*
1, Subha S
2
School of Information Technology and Engineering Professors, SITE, VIT University, Vellore.
Email: [email protected]
Received on 20-07-2016 Accepted on 19-08-2016
Abstract
Intelligent service robot development is an important and critical issue for human community applications. Robots
have been increasingly integrated into working tasks to replace humans. But as easy it is to get a robot do work for
you, the costlier it is to buy it. The project focuses on building a low cost robot which will be an amalgam of few
different robots performing different functions as obstacle detection, human body detection, wireless remote
controlled robot, accelerometer controlled robot, temperature detection, line following robot, etc. It is basically a
multifunctional robot which could be used in various working environments by changing its functional mode
according to the users need. It will be a synergistic blend of multiple sensors that could be used for intelligent service
robotics. The best feature of this multifunctional robot would be the use of DTMF module which would allow you to
control or change the functional modes of the robot by using your mobile even if you are miles away from it. The
goal of this work is to build a possible module which could summarize the existing solutions from various fields and
combine the cost efficient idea presented here, to head towards the creation of new systems and aim to future research
directions.
Keywords: Multifunctional robot, DTMF module, obstacle detection, human body detection, accelerometer,
temperature detection, line following robot.
Introduction
Robotics has had a great demand in every field since enormous advancement in technology. But buying individual
robots for specific functionalities would be an expensive investment. If there are two robots, one with function of
detecting the temperature and informing the farmer, other with the function of irrigating the fields by following a
particular path. It would be beneficial for the farmer to buy a robot with the integrated features of detecting
temperature and irrigating the fields by following a particular path. Intelligent service robotics needs an advanced

Kumaresan P*et al. /International Journal of Pharmacy & Technology
IJPT| Sep-2016 | Vol. 8 | Issue No.3 | 15370-15381 Page 15371
robot that opposes the idea of a robot made for a performing specific function. A robot whose functionality could be
controlled by the user. Using a single microcontroller to create a robot with multiple functionalities will be a cheap
alternative.
In this paper we have focused on integrating multiple functions within a single robot which could be done in a
moderate price range. The robot will be implemented using various modules which performs different functions such
as accelerometer controlled robot, line following robot, wireless remote controlled robot, temperature detection,
obstacle detection, human body detection. The functions will then be integrated onto a single robot and the functional
modes will be controlled by the DTMF. The robot could be used in agricultural fields or green house for irrigation ,
the same robot could be used to measure temperature and humidity in an environment and show it on the users phone,
it could be used as a wireless remote controlled robot which can be moved to places unsafe for humans, it could be
controlled by accelerometer which could be attached to hand of a disabled person and used to move the robot as per
his choice.
Background
Arduino is an open-source physical computing platform based on a simple i/o board and a development environment
that implements the Processing language. It can be used to develop individual interactive objects or can be connected
to software on computer (e.g. Flash, Processing).
An Arduino board usually comprises of an Atmel 8-bit, 16-bit and 32-bit AVR microcontroller with some paired
components that aid programming and integrate into other circuits. Other boards which could be used are raspberry
pi, pic microcontroller. We discuss Arduino, Accelerometer ADXL335, PIR sensor, Ultrasonic sensor, RF transmitter,
RF receiver, DTMF decoder module, IR sensor.
A. Arduino Board
Arduino has standard connectors, which allows the users to connect the CPU board to a variety of compatible add-on
modules referred as shields. Few shields communicate with the board directly via various pins, but many shields are
individually attended by an I²C serial bus so many shields can be piled on and used in parallel. Official Arduinos have
used the mega AVR series of chips, particularly the ATmega8, ATmega168, ATmega328, ATmega1280, and
ATmega2560. Most of these boards include a 5 volt linear regulator and a 16 MHz crystal oscillator . An Arduino's
microcontroller is pre-programmed with a boot loader which simplifies uploading of programs to the on-chip flash
memory, compared to other devices that require an external programmer.
Kumaresan P*et al. /International Journal of Pharmacy & Technology
IJPT| Sep-2016 | Vol. 8 | Issue No.3 | 15370-15381 Page 15372
Figure.1 Arduino Board.
B. Accelerometer ADXL335
It is a small, thin, low power, complete 3-axis accelerometer with signal conditioned voltage outputs. It can measure
the dynamic and static acceleration of gravity. It has three outputs for each axis i.e. X, Y & Z which are analog
outputs and hence require an ADC in a micro-controller. It can sense in the range of -3g to +3g.
Figure.2: Accelerometer ADXL335
C. PIR Sensor
It is used to detect the presence of humans within the distance of 10m at an angle of +15 to -15 degree from the
sensor. These are turned to detect the IR waves which originate from human beings in their proximity.
Figure.3 PIR Sensor
D. Ultrasonic Sensor
Ultrasonic waves are transmitted from the sensor head. The waves are then reflected from the object back and are
received from the sensor again. By measuring the length of time between the transmission and reception of the wave,
the position of the object is detected.

Kumaresan P*et al. /International Journal of Pharmacy & Technology
IJPT| Sep-2016 | Vol. 8 | Issue No.3 | 15370-15381 Page 15373
Figure.4 Ultrasonic Sensor.
E. RF Transmitter
A transmitter is a device used to send data wirelessly to a receiver over a distance of around 400m. These transmitters
work with 434MHz receivers. They can work with microcontrollers to make a very simple wireless data link.
Figure.5 RF transmitter.
F. RF Receiver
Receiver gets the data sent by the transmitter. A decoder is used to decode it for further use. The receiver does not
require any other RF components except for the antenna. The transmitter/receiver pair can work together as two way
communication or wireless data link.
Figure.6 RF Receiver.
G. IR Sensor
The IR sensor array consists of individual IR photodiodes and IR LEDs. The IR light which is emitted by the LED
strikes the surface and is reflected back to IR photodiode. The photodiode then gives an output voltage which is
proportional to reflectance of the surface i.e. high value for light surface and low for dark surface.
Figure.7 IR Sensor.
Kumaresan P*et al. /International Journal of Pharmacy & Technology
IJPT| Sep-2016 | Vol. 8 | Issue No.3 | 15370-15381 Page 15374
H. Temperature sensor LM35
The LM35 is an integrated circuit sensor. It can be used to measure temperature with an electrical output which is
proportional to the temperature (in oC). It has an output voltage that is proportional to the Celsius temperature. LM35
maintains an accuracy of +/-0.4 oC at room temperature and +/- 0.8
oC over a range of 0
oC to +100
oC.
Figure.8 Temperature Sensor.
I. Bluetooth Module HC05
HC-05 is a Bluetooth module with Serial Port Profile, which can be configured as either Master or as slave. It is a
replacement for wired serial connections, transparent usage. It can be used simply for a serial port replacement to
establish connection between MCU, PC to your embedded project and etc.
Figure.9 Bluetooth Module HC05.
J. DTMF decoder module
DTMF (Dual tone multiple frequency) decoder detects the DTMF tones. After detecting the DTMF tones it generates
a binary sequence corresponding to the key pressed in the DTMF keypad.
Figure.10 DTMF decoder.
Kumaresan P*et al. /International Journal of Pharmacy & Technology
IJPT| Sep-2016 | Vol. 8 | Issue No.3 | 15370-15381 Page 15375
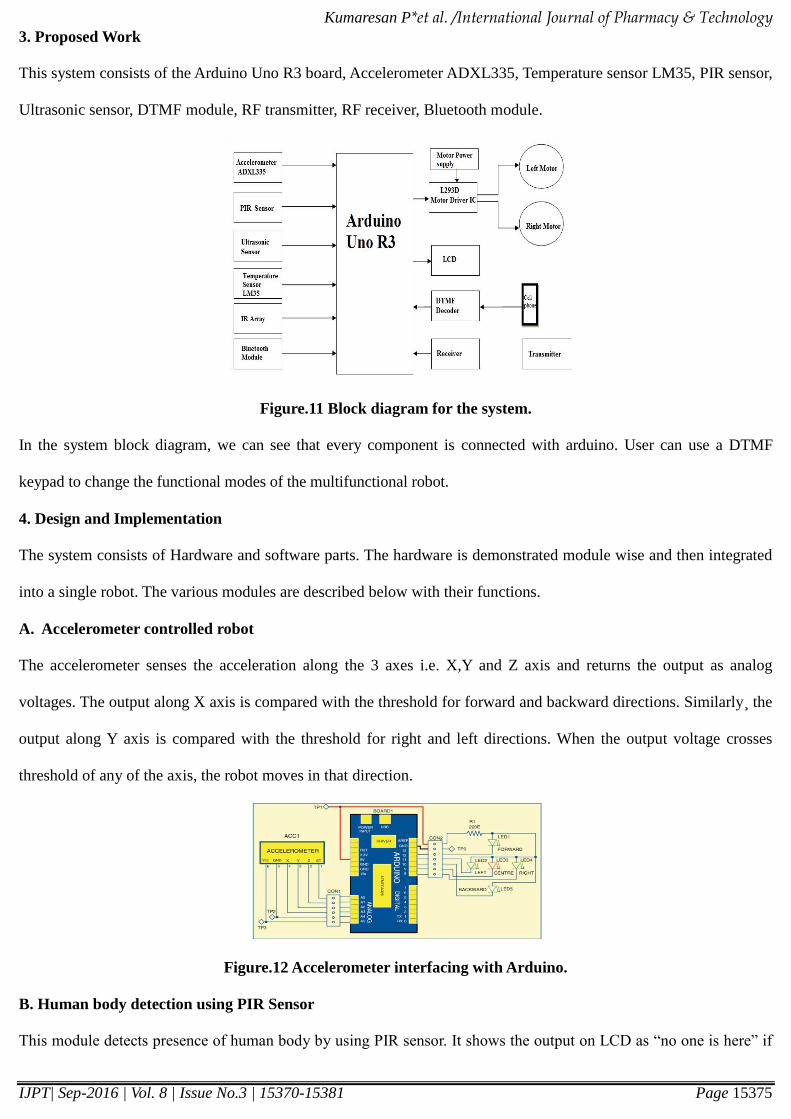
3. Proposed Work
This system consists of the Arduino Uno R3 board, Accelerometer ADXL335, Temperature sensor LM35, PIR sensor,
Ultrasonic sensor, DTMF module, RF transmitter, RF receiver, Bluetooth module.
Figure.11 Block diagram for the system.
In the system block diagram, we can see that every component is connected with arduino. User can use a DTMF
keypad to change the functional modes of the multifunctional robot.
4. Design and Implementation
The system consists of Hardware and software parts. The hardware is demonstrated module wise and then integrated
into a single robot. The various modules are described below with their functions.
A. Accelerometer controlled robot
The accelerometer senses the acceleration along the 3 axes i.e. X,Y and Z axis and returns the output as analog
voltages. The output along X axis is compared with the threshold for forward and backward directions. Similarly¸ the
output along Y axis is compared with the threshold for right and left directions. When the output voltage crosses
threshold of any of the axis, the robot moves in that direction.
Figure.12 Accelerometer interfacing with Arduino.
B. Human body detection using PIR Sensor
This module detects presence of human body by using PIR sensor. It shows the output on LCD as “no one is here” if
Kumaresan P*et al. /International Journal of Pharmacy & Technology
IJPT| Sep-2016 | Vol. 8 | Issue No.3 | 15370-15381 Page 15376
nobody is there in the detection range of the sensor otherwise it shows “someone is there” in presence of human body.
Figure.13 PIR Sensor interfacing with arduino.
C. Obstacle detection
Ultrasonic sensor is used to detect obstacles. The arduino is interfaced to LCD to show the output.
Figure.14: Interfacing of ultrasonic sensors with arduino.
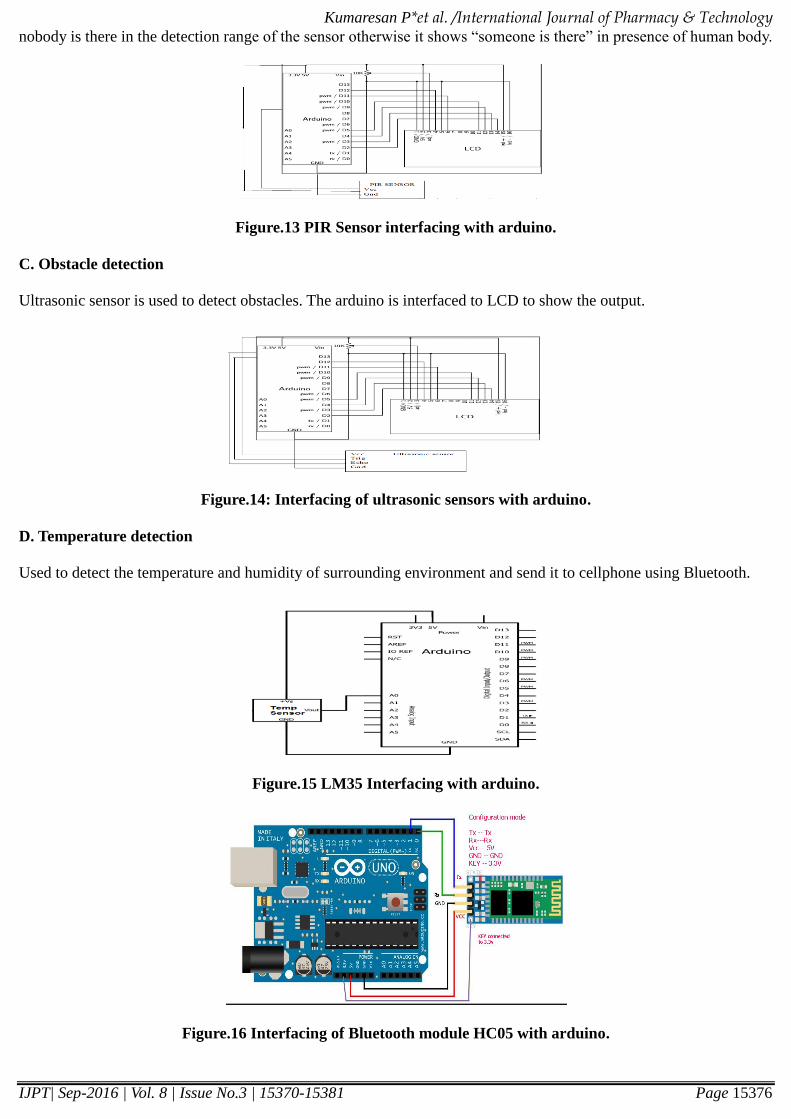
D. Temperature detection
Used to detect the temperature and humidity of surrounding environment and send it to cellphone using Bluetooth.
Figure.15 LM35 Interfacing with arduino.
Figure.16 Interfacing of Bluetooth module HC05 with arduino.
Kumaresan P*et al. /International Journal of Pharmacy & Technology
IJPT| Sep-2016 | Vol. 8 | Issue No.3 | 15370-15381 Page 15377
E. Wireless Remote controlled spy robot
RF transceiver module testing over motors. It is remotely controlled by RF and is able to send data back and control
the motors using wireless communication.
Figure.17 Circuit for spy robot.
F. Line following robot
A robot that follows a black line path. It has an IR sensor array attached at its bottom. The IR light which is emitted
by the LED strikes the surface and is reflected back to IR photodiode. The photodiode then gives an output voltage
which is proportional to reflectance of the surface i.e. high value for light surface and low for dark surface. The
threshold for each direction decides whether the robot will turn left or right.
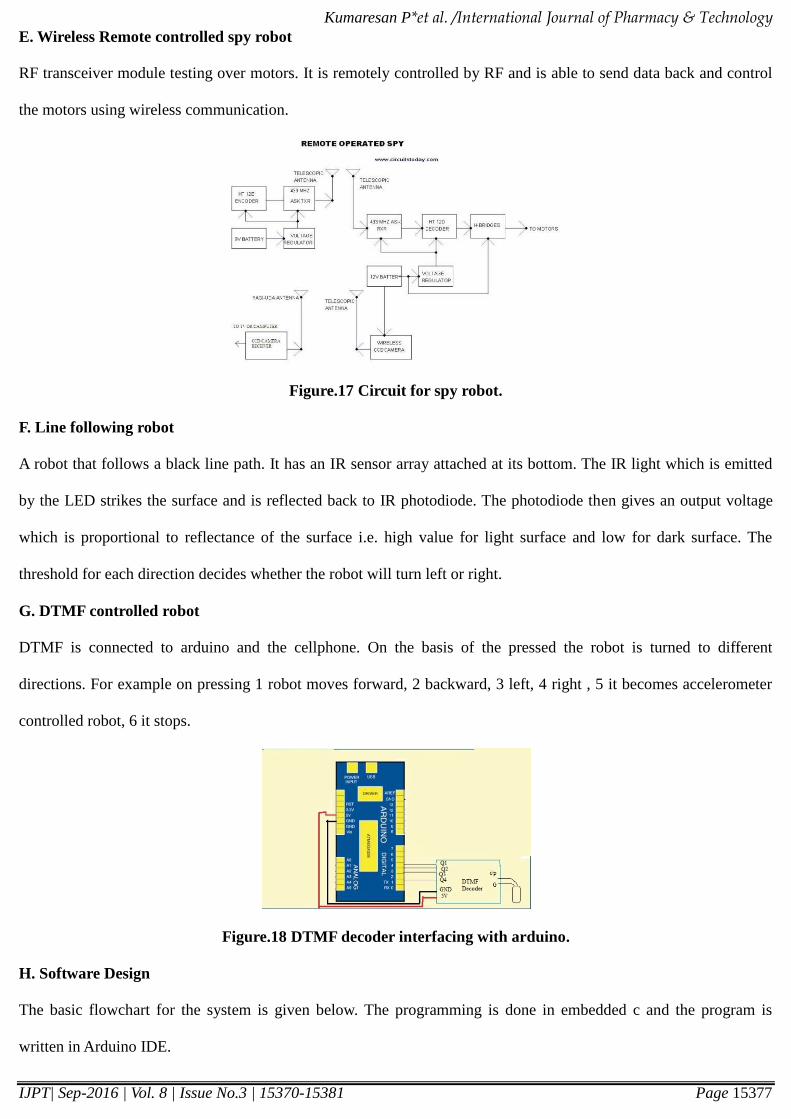
G. DTMF controlled robot
DTMF is connected to arduino and the cellphone. On the basis of the pressed the robot is turned to different
directions. For example on pressing 1 robot moves forward, 2 backward, 3 left, 4 right , 5 it becomes accelerometer
controlled robot, 6 it stops.
Figure.18 DTMF decoder interfacing with arduino.
H. Software Design
The basic flowchart for the system is given below. The programming is done in embedded c and the program is
written in Arduino IDE.

Kumaresan P*et al. /International Journal of Pharmacy & Technology
IJPT| Sep-2016 | Vol. 8 | Issue No.3 | 15370-15381 Page 15378
Figure.19 Flowchart for the proposed system.
5. Experimental Results
The circuits and experimental results for the above explained modules are given below.
Figure.20 Accelerometer based robot.
Accelerometer controlled robot can be used in the following applications: This prototype may be expected to
overcome the problem where a physically handicapped person wants to control his robot.
In many applications, controlling robots become quite difficult when it comes to controlling with remote or many
different switches. Mostly in industrial robotics, medical application for surgery, military application, construction
vehicles in civil side. In these fields it is quite complicated to control the robot with remote or switches, the operator
may get confused in the switches or button itself, so a controlling it with hand might make it easier.
Figure.21 Human body detection.

Kumaresan P*et al. /International Journal of Pharmacy & Technology
IJPT| Sep-2016 | Vol. 8 | Issue No.3 | 15370-15381 Page 15379
Human body detection may be used for following applications:
It can be used for security purposes, to keep a count of people inside a particular building or office or room.
For an intelligent video surveillance system, the detection of a human being is important for abnormal event
detection, human gait characterization, gender classification, people counting, person identification and tracking, fall
detection of elderly people, pedestrian detection, etc.
Figure.22 Obstacle detection.
Obstacle detection can be used for, integrating it with obstacle avoidance algorithms, it can be used to move the robot
autonomously on a safe path. It can be used in military applications and mines.
Figure.23 Temperature detection.
Temperature detection can be used for, For sensing one of the main crop parameters: humidity and the temperature.
Since the robot sends the data back to the user on his mobile, it is easier to access to access the environment without
being there outside.
Figure.24 Remote operated spy.
Wireless remote controlled robot can be used for the following: A wireless camera can be mounted on it, so that it can
watch enemy remotely when required. It can mutely enter into enemy area and send the user all the information
through its camera eyes. These robots can be used as replacement of soldiers in war areas. This spy robot can also be

Kumaresan P*et al. /International Journal of Pharmacy & Technology
IJPT| Sep-2016 | Vol. 8 | Issue No.3 | 15370-15381 Page 15380
used in star hotels, shopping malls, jewelry show rooms, etc., where there can be threat from intruders or terrorists.
Figure.25 Line following Robot.
Line following robot can be used in following applications:
Robots are increasingly being integrated into working tasks to replace humans especially to perform the repetitive
task. These robots are currently used in many fields of applications including office, military tasks, hospital
operations, dangerous environment and agriculture. It can be used in green house plants for irrigation and sprinkling
of pesticides.
Figure.26 DTMF controlled robot.
The main application of this robot is to control the robot via a mobile miles away from the robot. All the above robots
can be in integrates into one and DTMF could be used to control its functional mode.
6. Future Work
The proposed system gives the possibility of creating the robot which could be controlled by cellphone by the user
who is miles away from robot. The project could further be expanded by adding more features such as adding a
camera to any to the robot to act as surveillance robot or adding speech recognition to make it become a better spy
robot.
7. Conclusion
In this paper, we have implemented a multifunctional robot which can be controlled by accelerometer or a wireless
remote, it could help in obstacle detection, human body detection, temperature detection, it can follow a black line
path autonomously. These various functional modes of the robot are controlled by a cellphone. Pressing the
designated keys for a particular functional mode will make the robot function accordingly. The robot is a low cost

Kumaresan P*et al. /International Journal of Pharmacy & Technology
IJPT| Sep-2016 | Vol. 8 | Issue No.3 | 15370-15381 Page 15381
alternative to buying separate robots for specific functions. It can be used for intelligent services robotics or in
agricultural field or by a handicapped person to maintain his house security.
8. References
1. Varun Varadan, Antara Sharma, Dhruvin Sheth, Aakash Shroff “Gesture Controlled Accelerometer Using Wireless
RX-TX” International Journal of Scientific & Engineering Research, Volume 5, Issue 9, September 2014, pp.616-
620.
2. Anjali Parate, Apurva Parad, Anurag Shinde, Jasmin Untawale “Mobile Controlled Robot For Surveillance
Application” International Journal of Engineering Research and Applications (IJERA), International Conference
On Industrial Automation And Computing (ICIAC- 12-13 April 2014).
3. G.M. Acaccia, R.C. Michelini, R.M. Molfino, R.P. Razzol, “Mobile robots in greenhouse cultivation: inspection
and treatment of plants”, 2003.
4. Alireza Rafiq, Davood kalantari, Hamid Mashhadimeyghani, “Construction and development of an automatic
sprayer for greenhouse”, June 2003.
5. www.engineersgarage.com.
6. http://www.circuitstoday.com/wp-content/uploads/2011/01/Remote-Control-Operated-spy-Robot-Circuit-Remote-
Control-Section.
Corresponding Author:
Kumaresan P*,
Email: [email protected]


















