ISRU Potable Water Harvester for Astronaut Missions · ISRU Potable Water Harvester for Astronaut...
1
Nick Orenstein Department of Astronautical Engineering, University of Southern California ([email protected]) ISRU Potable Water Harvester for Astronaut Missions 45 th LPSC Abstract #1520 Phase 1 Computational simulations of releasing bound water molecules from regolith simulants and minerals via induction heating. Phase 2 Engineering design, construction, and testing of an induction furnace and water storage tank. 64B?2 12@0?6/2@ A52 =?<02@@ N<D A< 6:=92:2;A A52 various proposed instrument subsystems. Numerical simulations and prototype experiments should test the primary hypothesis that an induction furnace can successfully release and capture water embedded in the B;.? .;1 !.?A6.; ?24<96A5 )2?6M0.A6<; @5<B91 =?<0221 sequentially through power system, vibration, thermal vacuum, and rock/soil input tests. Tests in laboratory and at analog simulation sites can be performed on water ice samples mixed at various concentrations and surface depths into regolith simulants. Tests should also /2 =2?3<?:21 6; =.?./<960 N645A A< C2?63F <=2?./696AF 6; fractional gravity. Research Plan Implications Water is vital to human life. Developing elegant, simple, yet robust water harvesting and storage capabilities closes a key technology gap for human exploration employing ISRU. Harvest areas are small enough that one rover sent early could collect a self- sustainable reserve of water in a feasible mission time frame. An ISRU water harvester has the potential to answer >B2@A6<;@ <3 @062;A6M0 6;A2?2@A ?29.A21 A< (a) Collecting water in planetary surface environments (b) Cosmic origin of water via isotopic composition (c) Water release mechanisms from hydrated minerals (d) Mission volume requirements of regolith and water (e) ISRU instrument design (f) Low-power induction furnaces (g) Induction skin depth design (h) Nuclear-powered instrument design Spacewater Resources Water is a fundamental source of human life, and its bulk usage is inevitably necessary for any permanent human presence in space. As future astronauts venture off to hostile environments, they still rely on basic life support needs such as potable water. However, they shouldn’t have to bring everything with them if their destination contains the resources on site. In-situ ?2@<B?02 BA696G.A6<; &%( @64;6M0.;A9F ?21B02@ A52 cost, mass, and risk of sustained human activities beyond Earth. Potable drinking water is fundamentally linked to human health and survivability. Investigations are underway to quantify this precious resource in our solar system [1]–[6] that has the potential to change the entire strategy for lunar and eventual Martian settlement development. Future mission concepts must include a robot that harvests spacewater rather than send from Earth the water that a crew requires. Intelligent robotic operations can take advantage of the local resources in shared autonomy with astronauts. Concepts in the literature propose ways to extract water, but most of them suggest strip mining strategies that are bound to irreparably damage and deface the pristine extraterrestrial surface terrain. This proposal looked for elegant solutions; cleaner autonomous system designs less prone to adverse surface effects like dust eliminate major operations concerns. Background Release water vapor from regolith; capture and store Minimize excavation by using induction heating Water for astronauts to drink, cosmic origin studies, and more Proposed Instrument Area and Time Assuming the regolith is 2% water by weight and that water is present in a 1 cm thick subsurface layer, a robot could travel the area to collect the 12 L per person per day [5] for a 100 person crew to become self- sustainable [6] in roughly one month (Figs. 5 and 6). Sensors Induction Furnace Magnetometer, power measurement, temperature Water Composition Phase, potability, isotopic composition Water Storage Mass, temperature, pressure Instrument Requirements References [1] Clark RN, Pieters CM, Green RO, Boardman JW, and Petro NE (2011), Thermal removal from near-infrared imaging spectroscopy data of the Moon, J. Geophys. Res., 116, E00G16. [2] Colaprete A, et al. Detection of Water in the LCROSS Ejecta Plume. Science 330, 463 (2010). ,- ?22; %# 2A .9 '52 !<<; !6;2?.9<4F !.==2? ! 6:.46;4 @=20A?<:2A2? 3<? 9B;.? @062;02 Instrument description, calibration, on-orbit measurements, science data calibration and on-orbit validation. Journal of Geophysical Research, Vol. 116, E00G19 (2011). [4] Arvidson RE, et al. (2009), Results from the Mars Phoenix Lander Robotic Arm experiment, J. Geophys. Res., 114, E00E02. [5] Leshin LA, et al. Volatile, Isotope, and Organic Analysis of Martian Fines with the Mars Curiosity Rover. Science 341 (2013). [6] Meslin P-Y. Soil Diversity and Hydration as Observed by ChemCam at Gale Crater, Mars. Science 341 (2013). ,- *69@<; ) <==2? !<<;@56;2 &A699@ 5AA=www.coppermoonshinestills.com/id26.html. [8] Bamsey M, et al. Four-month Moon and Mars crew water utilization study conducted at the Flashline Mars Arctic Research Station, Devon Island, Nunavut. Advances in Space Research 43 (2009) 1256-1274. [9] O'Handley D, et al. Final Report on System Architecture Development for a Self-Sustaining Lunar Colony. NIAC Research Contract 07600-052 (2000). An induction coil at the surface would be shaped so that A52 :.4;2A60 M291 .;1 ?2@B9A6;4 52.A 0<;1B0A6<; =2;2A?.A2@ several centimeters into the regolith or rocks (Fig. 1). The low-pressure trapped water would sublimate, rise as vapor, and be captured by the harvester enclosure. The instrument should implement passive thermal control and be shaped like a whiskey still to promote phase change at the top and deposition in the arm region. Once full, the harvester should interface with a transfer seal in the storage unit. The storage tank interior should be maintained at a pressure and temperature to allow for liquid water. The harvester arm should experience this environment change and the collected ice would liquefy and fall into the tank. 64B?2 J!<<;@56;2 6@A6996;4 @=.02D.A2?K . %</<A60 6;1B0A6<; 3B?;.02 0<;02=A C.=<?6G2@ 2:/21121 D.A2? .;1 0.=AB?2@ B@6;4 D56@82F still geometry to promote phase change. Transfers potable water to storage when full. (b) Typical copper whiskey still [7]. 64B?2 &F@A2: 2C29<=:2;A .;1 &2;@<? ;A24?.A6<; 9<D 64B?2 '6:2 ?2>B6?21 3<? ?<C2?@ A< A?.C29 A52 5.?C2@A .?2. Aristarchus Crater (1250 km 2 ) MSL Landing Area (140 km 2 ) Crew: 4 (0 . 1 2 . 5 km 2 ) Crew: 100 (3 . 2 64 km 2 ) Crew: 1000 (32 635 km 2 ) 100% Eciency 5% Eciency 75% Eciency (to scale ) (legend ) 64B?2 &B?3.02 .?2. ?2>B6?21 3<? @293@[email protected];./92 5.?C2@A General Water ice will sublimate in the low-pressure surface environment, so the instrument must operate under these conditions. Central processing unit. Onboard calibration. Thermal controls. Minimal fault tolerance. Graceful degradation. Parallel redundancy. Systems for use on the Moon should be created M?@A .;1 A2@A21 <; @6A2 .@ . A2@A /21 3<? 2C2;AB.9 deployment at Mars. Habitat architecture could incorporate water storage to provide radiation protection. Closed-loop water recycling could minimize requirements for water resupply. Some lateral water transport within regolith may be acceptable. As the roving harvester moves, this water will eventually be forced upwards. 64B?2 B;.? D.A2? 6; LCROSS ejecta plume [2]. 64B?2 !.?A6.; D.A2? C.=<? 12A20A21 /F MSL SAM [5]. Lunar The Moon Mineralogy Mapper detected water absorption within regolith at 3 μm spectrum [1] At poles and in permanently shadowed craters [2] LCROSS detected 5 wt% water in ejecta (Fig. 2) [3] Martian Phoenix found icy soil 3–5 cm beneath surface [4] SAM on Mars Science Laboratory (MSL) heated rock samples; detected 1.5–3 wt% water in the emitted vapors (Fig. 3) [5] ChemCam on MSL observed physical and chemical D2.A52?6;4 =?<02@@2@ A5.A ?2N20A A52 .>B2<B@ history of Mars [6] Crew: 4 Crew: 100 Crew: 1000 Mahindra Tractor 1 m 26 m 4.3 h Apollo 17 Lunar Rover 9 h 9 d 90 d NASA K10 Test Rover 26 h 27 d 280 d Mars Curiosity Rover 37 y 930 y 9500 y
Transcript of ISRU Potable Water Harvester for Astronaut Missions · ISRU Potable Water Harvester for Astronaut...

Nick Orenstein Department of Astronautical Engineering, University of Southern California ([email protected])
ISRU Potable Water Harvester for Astronaut Missions
45th LPSC Abstract #1520
Phase 1 Computational simulations of releasing bound water molecules from regolith simulants and minerals via induction heating. Phase 2 Engineering design, construction, and testing of an induction furnace and water storage tank.
various proposed instrument subsystems. Numerical simulations and prototype experiments should test the primary hypothesis that an induction furnace can successfully release and capture water embedded in the
sequentially through power system, vibration, thermal vacuum, and rock/soil input tests. Tests in laboratory and at analog simulation sites can be performed on water ice samples mixed at various concentrations and surface depths into regolith simulants. Tests should also
fractional gravity.
Research Plan Implications Water is vital to human life. Developing elegant,
simple, yet robust water harvesting and storage capabilities closes a key technology gap for human exploration employing ISRU. Harvest areas are small enough that one rover sent early could collect a self-sustainable reserve of water in a feasible mission time frame.
An ISRU water harvester has the potential to answer
(a) Collecting water in planetary surface environments (b) Cosmic origin of water via isotopic composition (c) Water release mechanisms from hydrated minerals (d) Mission volume requirements of regolith and water (e) ISRU instrument design (f) Low-power induction furnaces (g) Induction skin depth design (h) Nuclear-powered instrument design
Spacewater Resources Water is a fundamental source of human life, and its
bulk usage is inevitably necessary for any permanent human presence in space. As future astronauts venture off to hostile environments, they still rely on basic life support needs such as potable water. However, they shouldn’t have to bring everything with them if their destination contains the resources on site. In-situ
cost, mass, and risk of sustained human activities beyond Earth.
Potable drinking water is fundamentally linked to
human health and survivability. Investigations are underway to quantify this precious resource in our solar system [1]–[6] that has the potential to change the entire strategy for lunar and eventual Martian settlement development. Future mission concepts must include a robot that harvests spacewater rather than send from Earth the water that a crew requires. Intelligent robotic operations can take advantage of the local resources in shared autonomy with astronauts.
Concepts in the literature propose ways to extract
water, but most of them suggest strip mining strategies that are bound to irreparably damage and deface the pristine extraterrestrial surface terrain. This proposal looked for elegant solutions; cleaner autonomous system designs less prone to adverse surface effects like dust eliminate major operations concerns.
Background
² Release water vapor from regolith; capture and store
² Minimize excavation by using induction heating
² Water for astronauts to drink, cosmic origin studies, and more
Proposed Instrument
Area and Time ² Assuming the regolith is 2% water by weight and that
water is present in a 1 cm thick subsurface layer, a robot could travel the area to collect the 12 L per person per day [5] for a 100 person crew to become self-sustainable [6] in roughly one month (Figs. 5 and 6).
Sensors ² Induction Furnace
² Magnetometer, power measurement, temperature ² Water Composition
² Phase, potability, isotopic composition ² Water Storage
² Mass, temperature, pressure
Instrument Requirements
References [1] Clark RN, Pieters CM, Green RO, Boardman JW, and Petro NE (2011), Thermal removal from near-infrared imaging spectroscopy data of the Moon, J. Geophys. Res., 116, E00G16. [2] Colaprete A, et al. Detection of Water in the LCROSS Ejecta Plume. Science 330, 463 (2010).
Instrument description, calibration, on-orbit measurements, science data calibration and on-orbit validation. Journal of Geophysical Research, Vol. 116, E00G19 (2011). [4] Arvidson RE, et al. (2009), Results from the Mars Phoenix Lander Robotic Arm experiment, J. Geophys. Res., 114, E00E02. [5] Leshin LA, et al. Volatile, Isotope, and Organic Analysis of Martian Fines with the Mars Curiosity Rover. Science 341 (2013). [6] Meslin P-Y. Soil Diversity and Hydration as Observed by ChemCam at Gale Crater, Mars. Science 341 (2013).
www.coppermoonshinestills.com/id26.html. [8] Bamsey M, et al. Four-month Moon and Mars crew water utilization study conducted at the Flashline Mars Arctic Research Station, Devon Island, Nunavut. Advances in Space Research 43 (2009) 1256-1274. [9] O'Handley D, et al. Final Report on System Architecture Development for a Self-Sustaining Lunar Colony. NIAC Research Contract 07600-052 (2000).
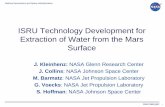
An induction coil at the surface would be shaped so that
several centimeters into the regolith or rocks (Fig. 1). The low-pressure trapped water would sublimate, rise as vapor, and be captured by the harvester enclosure. The instrument should implement passive thermal control and be shaped like a whiskey still to promote phase change at the top and deposition in the arm region. Once full, the harvester should interface with a transfer seal in the storage unit. The storage tank interior should be maintained at a pressure and temperature to allow for liquid water. The harvester arm should experience this environment change and the collected ice would liquefy and fall into the tank.
still geometry to promote phase change. Transfers potable water to storage when full. (b) Typical copper whiskey still [7].
Aristarchus Crater(1250 km2)
MSLLanding Area(140 km2)
Crew: 4(0.1 2.5 km2)
Crew: 100(3.2 64 km2)
Crew: 1000(32 635 km2)
100%Eciency
5%Eciency
75%Eciency
(to scale) (legend)
General ² Water ice will sublimate in the low-pressure
surface environment, so the instrument must operate under these conditions.
² Central processing unit. Onboard calibration. Thermal controls. Minimal fault tolerance. Graceful degradation. Parallel redundancy.
² Systems for use on the Moon should be created
deployment at Mars. ² Habitat architecture could incorporate water
storage to provide radiation protection. ² Closed-loop water recycling could minimize
requirements for water resupply. ² Some lateral water transport within regolith may
be acceptable. As the roving harvester moves, this water will eventually be forced upwards.
LCROSS ejecta plume [2]. MSL SAM [5].
Lunar ² The Moon Mineralogy Mapper detected water
absorption within regolith at 3 µm spectrum [1] ² At poles and in permanently shadowed craters [2] ² LCROSS detected 5 wt% water in ejecta (Fig. 2) [3] Martian ² Phoenix found icy soil 3–5 cm beneath surface [4] ² SAM on Mars Science Laboratory (MSL) heated rock
samples; detected 1.5–3 wt% water in the emitted vapors (Fig. 3) [5]
² ChemCam on MSL observed physical and chemical
history of Mars [6]
� Crew: 4� Crew: 100� Crew: 1000�
Mahindra�Tractor� 1 m� 26 m� 4.3 h�
Apollo 17�Lunar Rover� 9 h� 9 d� 90 d�
NASA K10�Test Rover� 26 h� 27 d� 280 d�
Mars Curiosity�Rover� 37 y� 930 y� 9500 y�