IRB 140 Product Specifications Rev.2

of 24
Transcript of IRB 140 Product Specifications Rev.2
-
8/11/2019 IRB 140 Product Specifications Rev.2
1/24
Product SpecificationIRB 140
3HAC 9041-1 / Rev 2M2000
-
8/11/2019 IRB 140 Product Specifications Rev.2
2/24
The information in this document is subject to change without notice and should not be construed as acommitment by ABB Robotics AB. ABB Robotics AB assumes no responsibility for any errors that mayappear in this document.
In no event shall ABB Robotics AB be liable for incidental or consequential damages arising from useof this document or of the software and hardware described in this document.
This document and parts thereof must not be reproduced or copied withoutABB Robotics ABs written permission, and contents thereof must not be imparted to a third party norbe used for any unauthorized purpose. Contravention will be prosecuted.
Additional copies of this document may be obtained from ABB Robotics AB at its then current charge.
ABB Robotics AB
Article number: 3HAC 9041-1/Rev 2Issue: M2000
ABB Robotics ABS-721 68 Vsters
Sweden
-
8/11/2019 IRB 140 Product Specifications Rev.2
3/24
Product Specification IRB 140
CONTENTSPage
Product Specification IRB 140 M2000 1
1 Description ....................................................................................................................... 3
1.1 Structure.................................................................................................................. 3
1.2 Safety/Standards..................................................................................................... 6
1.3 Installation .............................................................................................................. 8
Operating requirements.......................................................................................... 8
Mounting the manipulator...................................................................................... 8
Load diagram ......................................................................................................... 10
Mounting of equipment.......................................................................................... 12
1.4 Maintenance and Troubleshooting ......................................................................... 13
1.5 Robot Motion.......................................................................................................... 14
Performance according to ISO 9283...................................................................... 15
Velocity .................................................................................................................. 15
Resolution .............................................................................................................. 15
1.6 Signals .................................................................................................................... 15
Signal connections on robot arm............................................................................ 15
2 Specification of Variants and Options........................................................................... 17
3 Accessories ....................................................................................................................... 19
4 Index................................................................................................................................. 21
-
8/11/2019 IRB 140 Product Specifications Rev.2
4/24
Product Specification IRB 140
2 Product Specification IRB 140 M2000
-
8/11/2019 IRB 140 Product Specifications Rev.2
5/24
Description
Product Specification IRB 140 M2000 3
1 Description
1.1 Structure
IRB 140 is a 6-axis industrial robot, designed specifically for manufacturing industriesthat use flexible robot-based automation. The robot has an open structure that isspecially adapted for flexible use, and can communicate extensively with externalsystems.
The robots with Foundry protection are designed for harsh environment and havespecial surface treatment and paint for excellent corrosion protection. The connectorsare designed for severe environment, and bearings, gears and other sensitive parts arehigh protected. The robots have the FoundryPlus protection which means that the
whole manipulator is IP67 classified and steam washable.
The Clean Room robots are classified for clean room class 10. They have the samedegree of tightness and corrosion protection as the Foundry robots and are also steamwashable.
The robot is equipped with the operating system BaseWare OS. BaseWare OS controlsevery aspect of the robot, like motion control, development and execution ofapplication programs communication etc. See Product Specification S4Cplus.
For additional functionality, the robot can be equipped with optional software forapplication support - for example gluing and arc welding, communication features -network communication - and advanced functions such as multitasking, sensor controletc. For a complete description on optional software, see the Product SpecificationRobotWare Options.
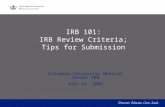
Figure 1 The IRB 140 manipulator has 6 axes.
Axis 2
Axis 1
Axis 3
Axis 4
Axis 5
Axis 6
-
8/11/2019 IRB 140 Product Specifications Rev.2
6/24
Description
4 Product Specification IRB 140 M2000
The IRB 140 is available in a number of different variants. They can all be mounted onfloor, inverted or on wall in any angle. The high speed variant, IRB 140T, providesfurther reduced cycle time:
Environment adaption Standard performance High speedvariants variants
IRB 140 IRB 140TFor foundry environment IRB 140F IRB 140TFFor clean room environment IRB 140CR IRB 140TCR
Weight: Manipulator 98 kg (excluding the cables to thecontroller)
Airborne noise level:The sound pressure level outside < 70 dB (A) Leq (acc. to
the working space Machinery directive 89/392 EEC)
-
8/11/2019 IRB 140 Product Specifications Rev.2
7/24
Description
Product Specification IRB 140 M2000 5
Figure 2 View of the manipulator from the back, side and above (dimensions in mm).
204 177
448
273
70
352
360
810
595
380 65
402 123
70
R244
Minimum turningradius
CL axis 1
CL
-
8/11/2019 IRB 140 Product Specifications Rev.2
8/24
Description
6 Product Specification IRB 140 M2000
1.2 Safety/Standards
The robot conforms to the following standards:
EN 292-1 Safety of machinery, terminology
EN 292-2 Safety of machinery, technical specifications
EN 954-1 Safety of machinery, safety related parts of controlsystems
EN 60204 Electrical equipment of industrial machines
IEC 204-1 Electrical equipment of industrial machines
ISO 10218, EN 775 Manipulating industrial robots, safety
ANSI/RIA 15.06/1992 Industrial robots, safety requirements
ISO 9787 Manipulating industrial robots, coordinate systems
and motions
IEC 529 Degrees of protection provided by enclosures
EN 50081-2 EMC, Generic emission
EN 61000-6-2 EMC, Generic immunity
ISO 9409-1 Manipulating industrial robots, mechanical interface
ANSI/UL 1740-1996 (option) Standard for Industrial Robots and RoboticEquipment
CAN/CSA Z 434-94 (option) Industrial Robots and Robot Systems - GeneralSafety Requirements
US Federal Standard 209 Clean room classification
The robot complies fully with the health and safety standards specified in the EECsMachinery Directives.
The robot is designed with absolute safety in mind. It has a dedicated safety system basedon a two-channel circuit which is monitored continuously. If any component fails, theelectrical power supplied to the motors shuts off and the brakes engage.
Safety category 3Malfunction of a single component, such as a sticking relay, will be detected at the nextMOTOR OFF/MOTOR ON operation. MOTOR ON is then prevented and the faulty
section is indicated. This complies with category 3 of EN 954-1, Safety of machinery -safety related parts of control systems - Part 1.
Selecting the operating modeThe robot can be operated either manually or automatically. In manual mode, the robotcan only be operated via the teach pendant, i.e. not by any external equipment.
Reduced speedIn manual mode, the speed is limited to a maximum of 250 mm/s (600 inches/min.).A speed limitation applies not only to the TCP (Tool Centre Point), but to all parts of therobot. It is also possible to monitor the speed of equipment mounted on the robot.
-
8/11/2019 IRB 140 Product Specifications Rev.2
9/24
Description
Product Specification IRB 140 M2000 7
Three position enabling deviceThe enabling device on the teach pendant must be used to move the robot when in man-ual mode. The enabling device consists of a switch with three positions, meaning thatall robot movements stop when either the enabling device is pushed fully in, or whenit is released completely. This makes the robot safer to operate.
Safe manual movementThe robot is moved using a joystick instead of the operator having to look at the teachpendant to find the right key.
Over-speed protectionThe speed of the robot is monitored by two independent computers.
Emergency stopThere is one emergency stop push button on the controller and another on the teachpendant. Additional emergency stop buttons can be connected to the robots safety
chain circuit.
Safeguarded space stopThe robot has a number of electrical inputs which can be used to connect externalsafety equipment, such as safety gates and light curtains. This allows the robots safetyfunctions to be activated both by peripheral equipment and by the robot itself.
Delayed safeguarded space stopA delayed stop gives a smooth stop. The robot stops in the same way as at normalprogram stop with no deviation from the programmed path. After approx. one secondthe power supplied to the motors shuts off.
Collision detection (option)In case an unexpected mechanical disturbance like a collision, electrode stik etcappears, the robot will stop and slightly back off from its stop position.
Restricting the working spaceThe movement of each of the axes can be restricted using software limits.
Hold-to-run controlHold-to-runmeans that you must depress the start button in order to move the robot.When the key is released the robot will stop. The hold-to-run function makes programtesting safer.
Fire safetyBoth the manipulator and control system comply with ULs (Underwriters Laboratory)tough requirements for fire safety.
Safety lamp (option)The robot can be equipped with a safety lamp mounted on the manipulator. This isactivated when the motors are in the MOTORS ON state.
-
8/11/2019 IRB 140 Product Specifications Rev.2
10/24
-
8/11/2019 IRB 140 Product Specifications Rev.2
11/24
Description
Product Specification IRB 140 M2000 9
Figure 3 Hole configuration (dimensions in mm).
25H8 (2x)
0,25 A
80
13
39
12
180
45
155
AC Axis 1
25H8 (2x)
13
391
180
A
B
A
B
B - B
A - A
-
8/11/2019 IRB 140 Product Specifications Rev.2
12/24
Description
10 Product Specification IRB 140 M2000
Load diagram
The robot is optimized for the rated load according to the load diagram and ratedmoment of inertia. These have been used in the performance tests. The maximumallowed load and moment of inertia are received from the formulas on page 11.
Figure 4 Rated weight for tool mounted on the mounting flange at different positions (centres of gravity).
Load diagram "MIA"
(Rated Performance)
0,000
0,050
0,100
0,150
0,200
0,250
0,300
0,350
0,400
0,450
0 0,05 0,1 0,15 0,2 0,25 0,3 0,35
L (m)
Z(m)
1kg
5kg
4kg
3kg
2kg
100 150 200 250 300 35050
Z mm
L mm
100
150
200
250
300
350
50
400
450
65
Z = see the above diagram and the coordinate system in the Product Specification S4CplusL = distance in X-Y plane from Z-axis to the centre of gravity
J0= rated own moment of inertia on the total handle weight = 0.012kgm2
-
8/11/2019 IRB 140 Product Specifications Rev.2
13/24
Description
Product Specification IRB 140 M2000 11
Mass kgLength (Z, L) mT NmJ kgm2
Mass 5 KgAxis 5
Maximum static load:
T5 = 9.81 Mass 8.5 Nm
T5i = 9.81 Mass (Z +0.065 + L/1.04) 11.4 Nm
Maximum dynamic load:
J5 = Mass ((Z+0.065)2+L2) + max (J0L) 0.35 kgm2
Axis 6Maximum static load:
T6 = 9.81 Mass L 4.9 Nm
Maximum dynamic load:J6 = Mass L2+ J0Z 0.24 kgm
2
Figure 5 Own moment of inertia.
(Z+0.065)2 +L2
Z
XCentre of gravity
J0L= Maximum own moment of inertiaaround the maximum vector in the X-Y-plane
J0Z = Maximum own moment of inertia around Z
-
8/11/2019 IRB 140 Product Specifications Rev.2
14/24
Description
12 Product Specification IRB 140 M2000
Mounting of equipment
Figure 6 The shaded area indicates the permitted position of the centre of gravity for any extraequipment mounted (dimensions in mm).
Figure 7 The mechanical interface, mounting flange (dimensions in mm).
74
70
M5 Depth 7.5 (2x)for equipmentMounting holes
62
51
M5 Depth 7.5 (2x)for equipmentMounting holes
185
D=220
D=150
120
Note!Maximum 1 kg if 0,5 kg on the wrist
1,5 kg if 0 kg on the wrist
Note! Maximum 0.5 kg
0 kg if 1,5 kg onthe upper arm house
31 37
if 1.0 kg on the upper arm house
45o
D=6 H7
M6 (4x)
R=20
A
A
0.05 B
(4x)90o
6
D=25
9
A - A
D=50
h8
B
H8
+0.0
33
-0
+0
-0.0
39
+0.012-0
-
8/11/2019 IRB 140 Product Specifications Rev.2
15/24
Description
Product Specification IRB 140 M2000 13
1.4 Maintenance and Troubleshooting
The robot requires only a minimum of maintenance during operation. It has beendesigned to make it as easy to service as possible:
- Maintenance-free AC motors are used.
- Oil is used for all gear boxes.
- The cabling is routed for longevity, and in the unlikely event of a failure, itsmodular design makes it easy to change.
- It has a program memory battery lowalarm.
The following maintenance is required:
- Changing batteries every third year.
The maintenance intervals depends on the use of the robot. For detailed information on
maintenance procedures, see Maintenance section in the Product Manual.
-
8/11/2019 IRB 140 Product Specifications Rev.2
16/24
Description
14 Product Specification IRB 140 M2000
1.5 Robot Motion
Type of motion Range of movement
Axis 1 Rotation motion +180o _ -180oAxis 2 Arm motion +110o _ -90oAxis 3 Arm motion +50o _ -230o
Axis 4 Wrist motion +200o _ -200oDefault+165 revolutions _ -165 revolutions Max**)
Axis 5 Bend motion +120o _ -120oAxis 6 Turn motion +400o _ -400oDefault
+163 revolutions _ -163 revolutions Max**)
**) Option. The default working range for axis 4 and axis 6 can be extendedby changing parameter values in the software
Figure 8 The extreme positions of the robot arm.
Pos 1
Pos 6
1243
151
1120
28
810670
184 324 486
70
Z
Pos 0
Pos 8
pos. x
Positions at wrist
z
7121092421
99596558352
45070
314765
1218
-670
X
Pos 7
Pos 2
Pos 3
pos. axis 2 axis 3
0-90+50-90+50
-230-90
Angle (degrees)
0123678
centre (mm)
000
110-90110-90
0123678
-
8/11/2019 IRB 140 Product Specifications Rev.2
17/24
Description
Product Specification IRB 140 M2000 15
Performance according to ISO 9283
At rated load and 1 m/s velocity on the inclined ISO test plane with all six robot axesin motion.
Unidirectional pose repeatability:RP = 0.03 mm
Linear path accuracy:AT = 1.0 mm
Linear path repeatability:RT = 0.15 mm
Minimum positioning time, to within 0.5 mm of the position:0.2 sec. (on 35 mm linear path)
The above values are the range of average test-results from a number of robots. Ifguaranteed values are required, please contact your nearest ABB Flexible Automation
Centre.
Velocity
Axis no. IRB 140 IRB 140T
1 200o/s 250o/s2 200o/s 250o/s3 260o/s 260o/s4 360o/s 360o/s5 360o/s 360o/s
6 450o/s 450o/s
There is a supervision to prevent overheating in applications with intensive andfrequent movements.
Resolution
Approx. 0.01o on each axis.
1.6 Signals
Signal connections on robot arm
For connection of extra equipment on the manipulator, there are cables integrated intothe manipulators cabling from the controller to the upper arm housing.In the controller, the signals are connected to 12-pole terminals, Phoenix MSTB 2.5/12-ST-5.08, and on the upper arm housing to FCI UT07 14 12SH44N.
Hose for compressed air is also integrated into the manipulator. There is an inlet(R1/4) at the base and an outlet (R1/4) on the upper arm housing.
Signals 12 49V, 500 mAAir 1 Max. 8 bar, inner hose diameter 6.5 mm
-
8/11/2019 IRB 140 Product Specifications Rev.2
18/24
Description
16 Product Specification IRB 140 M2000
-
8/11/2019 IRB 140 Product Specifications Rev.2
19/24
Specification of Variants and Options
Product Specification IRB 140 M2000 17
2 Specification of Variants and Options
The different variants and options for the IRB 140 are described below.
The same numbers are used here as in the Specification form.For controller options, see Product Specification S4Cplus, and for software options, seeProduct Specification RobotWare Options.
1 MANIPULATOR
VARIANTS
021 Standard performance variants:IRB 140 / IRB 140F / IRB 140CR022 High speed variants: IRB 140T / IRB 140TF / IRB 140TCR
Manipulator colour
330 ABB orange
354 The manipulator is painted with ABB white cleanroom (RAL 9003)
352 The manipulator is painted with the chosen RAL-colour
Protection
035 Standard manipulator
036 FoundryRobot adapted for foundry or other harsh environments.The robot has the FoundryPlus protection which means that the whole manipulator isIP67 classified and steam washable. An excellent corrosion protection is obtained by aspecial coating. The connectors are designed for severe environments, and bearings, gearsand other sensitive parts are high protected.Only available colour is ABB orange Foundry.
037 Clean RoomRobot with clean room class 10 and with the same protection as in option 036.Only available colour is white.
CONNECTOR KIT
045 Detached connectors, suitable to the connectors on the upper arm.The kit consists of connectors, pins and sockets.
EQUIPMENT
691 Safety lampA safety lamp with an orange fixed light can be mounted on the manipulator.
The lamp is active in MOTORS ON mode.The safety lamp is required on a UL/UR approved robot.
-
8/11/2019 IRB 140 Product Specifications Rev.2
20/24
Specification of Variants and Options
18 Product Specification IRB 140 M2000
-
8/11/2019 IRB 140 Product Specifications Rev.2
21/24
Accessories
Product Specification IRB 140 M2000 19
3 Accessories
Basic software and software options for robot and PC
For more information, see Product Specification S4Cplus, and Product SpecificationRobotWare Options.
Robot Peripherals
- Motor Units
-
8/11/2019 IRB 140 Product Specifications Rev.2
22/24
Accessories
20 Product Specification IRB 140 M2000
-
8/11/2019 IRB 140 Product Specifications Rev.2
23/24
Index
Product Specification IRB 140 M2000 21
4 Index
A
accessories 19
C
clean room standards 8
connector kit 17
cooling device 4
E
emergency stop 7enabling device 7
equipment
mounting 12
permitted extra load 12
F
fire safety 7
H
hold-to-run control 7hole configuration 9
humidity 8
I
installation 8
L
load 8
load diagrams 10
M
maintenance 13
manipulator colour
foundry
clean room17
manipulator colours 17
mechanical interface 12
motion 14
mounting
extra equipment 12
robot 8
mounting flange 12
N
noise level 4
O
operating requirements 8
options 17
overspeed protection 7
P
payload 8
protection
foundry
clean room17
protection standards 8
R
range of movement
working space 14
reduced speed 6
repeatability 15
resolution 15
Robot Peripherals 19
robot versions 4, 17
S
safeguarded space stop 7
delayed 7
safety 6
safety lamp 7, 17
service 13space requirements 4
standards 6
structure 3
T
temperature 8
troubleshooting 13
U
UL approved 6
-
8/11/2019 IRB 140 Product Specifications Rev.2
24/24
Index
V
variants 4, 17
velocity 15
W
weight 4
working space
restricting 7