ION GNSS+ 2015 · PDF fileION GNSS+ 2015 GNSS + Other Sensors ... • Mass-Market...
62
The 28th International Technical Meeting of the Satellite Division of The Institute of Navigation ION GNSS+ 2015 GNSS + Other Sensors in Today’s Marketplace September 14 – 18, 2015 Tutorials: September 14 – 15 Tampa Convention Center / Tampa, Florida SYSTEMS AND APPLICATION TRACKS • Mass-Market Applications • High Performance & Safety-Critical Applications • System Updates, Plans and Policies Also featuring the popular Indoor Location Panel and Demonstrations. The world’s largest technical meeting and showcase of GNSS technology, products and services. PEER-REVIEWED TRACKS • Multisensor Navigation and Applications • Algorithms and Methods • Advanced GNSS Technologies
Transcript of ION GNSS+ 2015 · PDF fileION GNSS+ 2015 GNSS + Other Sensors ... • Mass-Market...
The 28th International Technical Meeting of the Satellite Division of The Institute of Navigation
ION GNSS+ 2015GNSS + Other Sensors in Today’s Marketplace
September 14 – 18, 2015 Tutorials: September 14 – 15
Tampa Convention Center / Tampa, Florida
SYSTEMS AND APPLICATION TRACKS • Mass-Market Applications • High Performance & Safety-Critical Applications • System Updates, Plans and Policies
Also featuring the popular Indoor Location Panel and Demonstrations.
The world’s largest technical meeting and showcase of GNSS technology, products and services.
PEER-REVIEWED TRACKS • Multisensor Navigation and Applications • Algorithms and Methods • Advanced GNSS Technologies
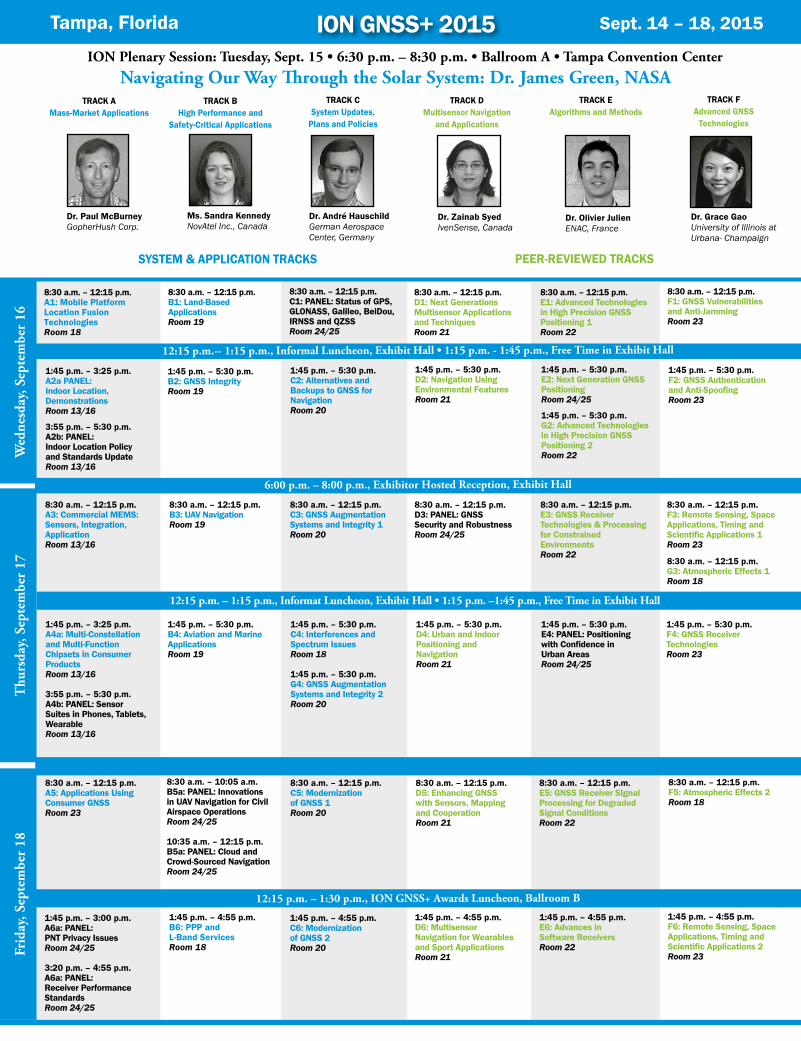
ION Plenary Session: Tuesday, Sept. 15 • 6:30 p.m. – 8:30 p.m. • Ballroom A • Tampa Convention Center
Tampa, Florida Sept. 14 – 18, 2015
Navigating Our Way Through the Solar System: Dr. James Green, NASA
8:30 a.m. – 12:15 p.m.A1: Mobile Platform Location Fusion Technologies Room 18
1:45 p.m. – 3:25 p.m. A2a PANEL:Indoor Location, DemonstrationsRoom 13/16
3:55 p.m. – 5:30 p.m. A2b: PANEL: Indoor Location Policy and Standards UpdateRoom 13/16
8:30 a.m. – 12:15 p.m. B1: Land-Based ApplicationsRoom 19
1:45 p.m. – 5:30 p.m. B2: GNSS IntegrityRoom 19
8:30 a.m. – 12:15 p.m.C1: PANEL: Status of GPS, GLONASS, Galileo, BeiDou, IRNSS and QZSSRoom 24/25
1:45 p.m. – 5:30 p.m. C2: Alternatives and Backups to GNSS for NavigationRoom 20
8:30 a.m. – 12:15 p.m.D1: Next Generations Multisensor Applications and TechniquesRoom 21
1:45 p.m. – 5:30 p.m. D2: Navigation Using Environmental FeaturesRoom 21
8:30 a.m. – 12:15 p.m.E1: Advanced Technologies in High Precision GNSS Positioning 1Room 22
1:45 p.m. – 5:30 p.m. E2: Next Generation GNSS PositioningRoom 24/25
1:45 p.m. – 5:30 p.m. G2: Advanced Technologies in High Precision GNSS Positioning 2Room 22
8:30 a.m. – 12:15 p.m.A3: Commercial MEMS:Sensors, Integration,ApplicationRoom 13/16
1:45 p.m. – 3:25 p.m.A4a: Multi-Constellation and Multi-Function Chipsets in Consumer ProductsRoom 13/16
3:55 p.m. – 5:30 p.m.A4b: PANEL: Sensor Suites in Phones, Tablets, WearableRoom 13/16
8:30 a.m. – 12:15 p.m.A5: Applications Using Consumer GNSSRoom 23
1:45 p.m. – 3:00 p.m.A6a: PANEL: PNT Privacy IssuesRoom 24/25
3:20 p.m. – 4:55 p.m.A6a: PANEL: Receiver Performance StandardsRoom 24/25
8:30 a.m. – 12:15 p.m.B3: UAV NavigationRoom 19
1:45 p.m. – 5:30 p.m.B4: Aviation and Marine ApplicationsRoom 19
8:30 a.m. – 10:05 a.m.B5a: PANEL: Innovations in UAV Navigation for Civil Airspace OperationsRoom 24/25
10:35 a.m. – 12:15 p.m.B5a: PANEL: Cloud and Crowd-Sourced NavigationRoom 24/25
1:45 p.m. – 4:55 p.m.B6: PPP and L-Band ServicesRoom 18
8:30 a.m. – 12:15 p.m.C3: GNSS Augmentation Systems and Integrity 1Room 20
1:45 p.m. – 5:30 p.m.C4: Interferences and Spectrum IssuesRoom 18
1:45 p.m. – 5:30 p.m.G4: GNSS Augmentation Systems and Integrity 2Room 20
8:30 a.m. – 12:15 p.m. C5: Modernization of GNSS 1Room 20
1:45 p.m. – 4:55 p.m.C6: Modernization of GNSS 2Room 20
8:30 a.m. – 12:15 p.m.D3: PANEL: GNSS Security and RobustnessRoom 24/25
1:45 p.m. – 5:30 p.m.D4: Urban and Indoor Positioning and NavigationRoom 21
8:30 a.m. – 12:15 p.m.D5: Enhancing GNSS with Sensors, Mapping and CooperationRoom 21
1:45 p.m. – 4:55 p.m.D6: Multisensor Navigation for Wearables and Sport ApplicationsRoom 21
8:30 a.m. – 12:15 p.m.E3: GNSS Receiver Technologies & Processing for Constrained EnvironmentsRoom 22
1:45 p.m. – 5:30 p.m.E4: PANEL: Positioning with Confidence in Urban AreasRoom 24/25
8:30 a.m. – 12:15 p.m.E5: GNSS Receiver SIgnal Processing for Degraded Signal ConditionsRoom 22
1:45 p.m. – 4:55 p.m.E6: Advances in Software ReceiversRoom 22
8:30 a.m. – 12:15 p.m.F1: GNSS Vulnerabilities and Anti-Jamming Room 23
1:45 p.m. – 5:30 p.m. F2: GNSS Authentication and Anti-SpoofingRoom 23
8:30 a.m. – 12:15 p.m.F3: Remote Sensing, Space Applications, Timing and Scientific Applications 1Room 23
8:30 a.m. – 12:15 p.m.G3: Atmospheric Effects 1Room 18
1:45 p.m. – 5:30 p.m.F4: GNSS Receiver TechnologiesRoom 23
8:30 a.m. – 12:15 p.m.F5: Atmospheric Effects 2Room 18
1:45 p.m. – 4:55 p.m.F6: Remote Sensing, Space Applications, Timing and Scientific Applications 2Room 23
12:15 p.m. -- 1:15 p.m., Informal Luncheon, Exhibit Hall • 1:15 p.m. - 1:45 p.m., Free Time in Exhibit Hall
Wed
nesd
ay, S
epte
mbe
r 16
6:00 p.m. – 8:00 p.m., Exhibitor Hosted Reception, Exhibit Hall
12:15 p.m. – 1:30 p.m., ION GNSS+ Awards Luncheon, Ballroom B
Frid
ay, S
epte
mbe
r 18
Thu
rsda
y, S
epte
mbe
r 17
Dr. André Hauschild German Aerospace Center, Germany
Ms. Sandra Kennedy NovAtel Inc., Canada
Dr. Paul McBurney GopherHush Corp.
Dr. Olivier Julien ENAC, France
Dr. Grace Gao University of Illinois at Urbana- Champaign
Dr. Zainab Syed IvenSense, Canada
TRACK A Mass-Market Applications
TRACK B High Performance and
Safety-Critical Applications
ION GNSS+ 2015
TRACK C System Updates,
Plans and Policies
TRACK D Multisensor Navigation
and Applications
TRACK E Algorithms and Methods
TRACK F Advanced GNSS
Technologies
12:15 p.m. – 1:15 p.m., Informat Luncheon, Exhibit Hall • 1:15 p.m. –1:45 p.m., Free Time in Exhibit Hall
SYSTEM & APPLICATION TRACKS PEER-REVIEWED TRACKS
ION GNSS+ 2015 Program Organizers
Chair Dr. John Betz The MITRE Corporation
Immediate Past Chair Dr. Jade Morton Colorado State University
Treasurer Dr. Grace Gao University of Illinois at Urbana-Champaign
European Technical Advisor Dr. Terry Moore University of Nottingham, UK
Vice Chair Dr. Frank van Diggelen Broadcom
Secretary Mr. Doug Taggart Overlook Systems Technologies
Technical Advisor Dr. José Ángel Ávila Rodríquez European Space Agency, The Netherlands
Technical Advisor Dr. Yuanxi Yang National Adminis-tration of GNSS and Applications, China
Technical Advisor Dr. Hiroaki Maeda Lighthouse Technol-ogy and Consulting Co., Japan
Dr. Olivier Julien ENAC, France
Dr. André Hauschild German Aerospace Center, Germany
Dr. Grace Gao University of Illinois at Urbana- Champaign
Satellite Division Officers
Technical Chairs
Ms. Sandra Kennedy NovAtel Inc., Canada
General Chair Dr. Terry Moore University of Nottingham, UK
Program Chair Dr. Gary McGraw Rockwell Collins
Pacific Rim Technical Advisor Dr. Allison Kealy The University of Melbourne, Australia
Dr. Paul McBurney GopherHush Corp.
Dr. Zainab Syed IvenSense, Canada
Tutorials Chair Ms. Patricia Doherty Boston College
ION President Dr. Dorota Grejner-Brzezinska The Ohio State University
Technical Advisor Dr. Sergey Karutin Central Institute of Machine Building, Russia
Systems and Applications Tracks
Peer- Reviewed Tracks
The 29th International Technical Meeting of the
Satellite Division of The Institute of Navigation
ION GNSS+ 2016
September 12 – 16, 2016 Show Dates: Sept. 14 – 15
Tutorials: Sept. 12 – 13
Oregon Convention Center Portland, Oregon
www.ion.org/gnss
An opportunity to show to the world’s leading authorities on
global navigation satellite systems!
SAVE THE DATE:
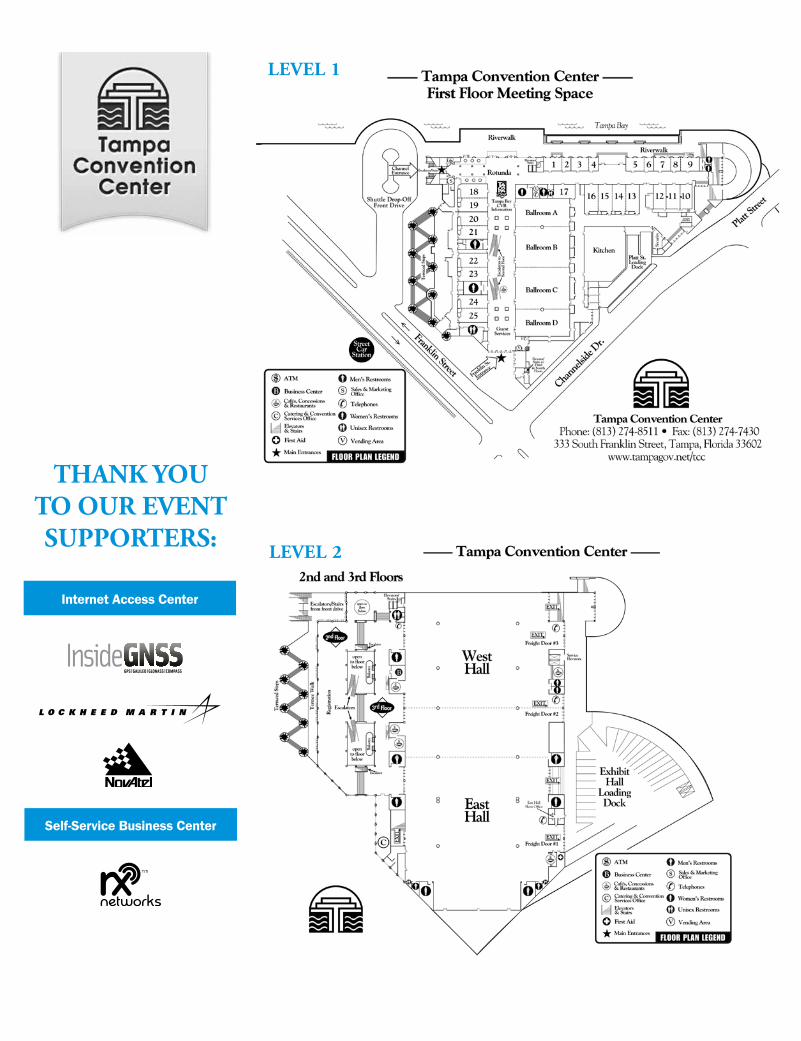
THANK YOU TO OUR EVENT SUPPORTERS:
Internet Access Center
Self-Service Business Center
LEVEL 2
LEVEL 1
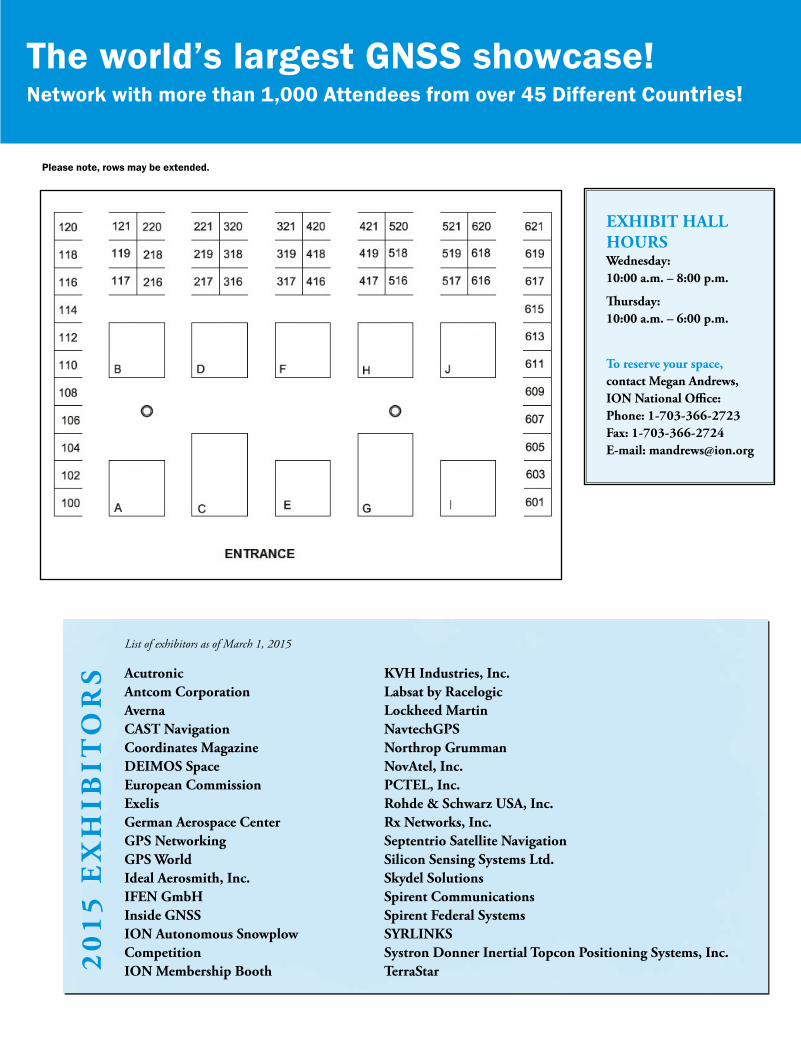
Acutronic Antcom Corporation Averna CAST Navigation Coordinates Magazine DEIMOS Space European Commission Exelis German Aerospace Center GPS Networking GPS World Ideal Aerosmith, Inc. IFEN GmbH Inside GNSS ION Autonomous Snowplow Competition ION Membership Booth
ExHIBIT HALL HOURSWednesday: 10:00 a.m. – 8:00 p.m.
Thursday: 10:00 a.m. – 6:00 p.m.
To reserve your space, contact Megan Andrews,ION National Office: Phone: 1-703-366-2723 Fax: 1-703-366-2724 E-mail: [email protected]
KVH Industries, Inc. Labsat by Racelogic Lockheed Martin NavtechGPS Northrop Grumman NovAtel, Inc. PCTEL, Inc. Rohde & Schwarz USA, Inc. Rx Networks, Inc. Septentrio Satellite Navigation Silicon Sensing Systems Ltd. Skydel Solutions Spirent Communications Spirent Federal Systems SYRLINKS Systron Donner Inertial Topcon Positioning Systems, Inc. TerraStar2
01
5 E
xH
IBIT
OR
S
Please note, rows may be extended.
List of exhibitors as of March 1, 2015
The world’s largest GNSS showcase!Network with more than 1,000 Attendees from over 45 Different Countries!

ION GNSS+ 2015 TUTORIALS
ION
GN
SS
+ 2
015
TUTO
RIA
LS G
eneral Information and S
chedule
The ION GNSS+ pre-conference tutorials have been orga-nized to provide in-depth learning of specific GNSS related disciplines prior to the start of the technical program. All courses will be taught in a classroom setting at the Tampa Convention Center by some of the world’s leading GNSS educators. Paper course notes will be provided to attendees by the instructor on the day of the course. Electronic notes will be made available from the meeting website. Note that power will NOT be made available to course attendees for individual laptop computers; please come prepared with adequate battery power if required. It is also recommended that attendees dress in layers to accommodate varying tem-peratures in the facility.
Tutorial Cost: $375 per course unit if registered and paid by August 14; $425 per course if payment is received after August 14. Please reference the ION GNSS+ registration form for other registration policies.
Registration: Registration for the ION GNSS+ tutorials is accomplished online through the normal conference registration process. ION reserves the right to cancel a tutorial if adequate registration is not obtained. If a course is cancelled the full cost of the course will be refunded via the original payment method.
Date/Time Course Instructor
Monday, September 141:30 p.m. – 5:00 p.m. Select from: Fundamentals of GNSS 1: GPS Emphasis Dr. Chris Bartone GNSS Receiver Design 1: RF Front-End Theory Dr. Sanjeev Gunawardena Kalman Filer Applications to Integrated Navigation 1 Dr. James Farrell & Dr. Frank van Graas Real-Time Kinematic (RTK) Positioning Dr. Sunil Bisnath
6:00 p.m. – 9:30 p.m. Select from: Fundamentals of GNSS 2: GPS Emphasis Dr. Chris Bartone GNSS Receiver Design 2: Baseband Signal Processing Dr. Sanjeev Gunawardena Kalman Filer Applications to Integrated Navigation 2 Dr. James Farrell & Dr. Frank van Graas Precise Point Positioning (PPP) Dr. Sunil Bisnath
Tueday, September 159:00 a.m. – 12:30 p.m. Select from: Introduction to Multi-Constellation GNSS Signals Dr. Christopher Hegarty Ubiquitous Positioning Dr. Ramsey Faragher Inertial Navigation: Sensors, Algorithms, and Performance Dr. Mike Veth Introduction to GNSS Remote Sensing Dr. James Garrison Autonomous Navigation and Smart Vehicles Dr. Umit Ozguner
1:30 p.m. – 5:00 p.m. Select from: GNSS Effects for Aviation Dr. Todd Walter Robust and Resilient Navigation Dr. Todd E. Humphreys Image Aided Inertial Navigation Dr. Mike Veth GNSS for Smartphone Navigation Mr. Greg Turetzky Guidance, Navigation and Control of Small UAVs Dr. Demoz Gebre-Egziabher
ION GNSS+ 2015 TUTORIALS SCHEDULE

TUTORIALS – Monday Afternoon, September 14 – 1:30 p.m. – 5:00 p.m.IO
N G
NSS+ 2015 T
UT
OR
IALS – M
onday, September 14
Fundamentals of GNSS 1: GPS EmphasisThis course covers the fundamentals of GNSS with major emphasis on GPS. The course begins with an overview of GNSS and GPS. Presentation of coordinate frames and spread spectrum techniques used in GNSS are illustrated. GPS signal structure and navigation data formats (legacy and modernized) will be discussed. (Only a brief over of other GNSS such as Galileo, Glonass, BeiDou, QZSS, and IRNSS will be presented.) This course concludes with an overview of GNSS antenna and receiver technologies. Topics to be covered include:• Introductiontopositioningsystems• AbriefhistoricaltimelineofGNSS•GPSSegments: space segment and SV blocks;
ground control & improvement programs; user segment and applications
•GPSLinkBudget• FundamentalconceptofGNSSposition
and time determination •Coordinateframesanddatum’susedinthe
application of GNSS: Earth Centered Inertial; Earth CenteredEarthFixed;Latitude,Longitude,Height;Height:MSL/Orthometricheight,Ellipsoidalheight,Geoid Undulation; WGS-84 and the International TerrestrialReferenceFrame;LocalLevelTangent;Coordinate Conversion
•GNSSsignalstructureformats;legacyandmodernized signals: Direct Sequence Spread Spectrum;autoandcrosscorrelation;LegacyGPS:C/A,P(Y)codeformats;Motivationformodernizedsignal formats
•ModernizedGPS:L2Csignalformat,status;L5signalformat,status;L1Csignalformat,status
•OtherGNSSs(Galileo,Glonass,BeiDou,QZSS,IRNSS)-brief overview
•GPSNavigationMessageDataFormatDescriptions : NAV, CNAV, CNAV-2
•OverviewofGNSSantennatechnologies: Antenna technologies vs. performance vs. Application ; Antenna Technologies: dipoles, helix, patches, multi-band GNSS; Ground plane effects
•OverviewofGNSSreceivertechnologies: Carrier tracking loops (frequency and phase lock loops); Code tracking loops (order and delay variations)
Course Level: Beginner
Dr. Chris G. Bartone, P.E. is a professor at Ohio University with over 30 years of professional experience. He received his PhD EE from Ohio University, a MSEE from the Naval Postgraduate School, and BSEE from Penn State. He previously worked for the Naval Air Warfare Center, performing RDT&E on CNS systems. Dr. Bartone has developed and teaches a number of GPS, radar, wave propagation and antenna classes. His research concentrates on all aspects of navigation.
Kalman Filter Applications to Integrated Navigation 1 The focus of this course is on the basic theory, an intuitive understanding as well as practical considerations, for the design and implementation of Kalman filters. Although many new types of filters are published in the literature, the Kalman filter is still the optimal and most efficient solution for the majority of integrated navigation systems. The course starts with a review of statistics and detailed insights into the most important noise processes, including random walk and Gauss-Markov processes. This is followed by a review of state variables and an overview of Kalman filters, including linear, linearized and extended filters. Matlab®-based examples are provided to facilitate hands-on experience with Kalman filters for integrated navigation applications.
For those having no previous experience with modern estimation, a review of funda-mentalsisincluded.Linearsystemsarecharacterized in terms of (1) a vector containing the minimum number of independent quantities required to define its state at any instant of time and (2) a matrix expression capable of propagating that state from one time to another. In combination with expressions relating measurements to states, a standard cycle is formed whereby a system's entire time history is continuously produced, with the best accuracies achievable from any combination of sensors, extravagant or austere, providing any sequence of measurements that can be incomplete, intermittent and indirect, as well as imprecise. That already wide versatility is broadened further by straightforward extension to systems with nonlinearities (Extended Kalman Filter; EKF) which has proved adequate for a host of applications (including some to be discussed in this tutorial). The relation between Kalman (sequential) and block (weighted least squares) estimation is illustrated, and a number of important subtleties that often go unrecognized will be uncovered.
Course Level: The course is at the beginner-level and will enhance understanding of the principles of filtering at the beginner and intermediate levels.
Dr. James L. Farrell is an ION Fellow and author of over 80 journal and conference manuscripts. He authored Integrated Aircraft Navigation (Academic Press, 1976) and GNSS Aided Navigation and Tracking (2007). His technical experience includes teaching appointments at MarquetteandUCLA,Honeywell,Bendix-Pacific,and Westinghouse in design, simulation, and validation/testformodernestimationalgorithmsin navigation and tracking applications, and digital communications system design. As presidentandtechnicaldirectorofVIGILINC.he has continued his teaching and consulting on inertial navigation and tracking for private industry, DOD, and university research.
GNSS Receiver Design 1: RF Front-End Theory and DesignThis is the first of a two-part sequence covering the design and practical implementation of GNSS receivers using the latest RF and digital signal processing technologies. Topics to be covered are applicable to a wide range of GNSS user equipment design from reference receivers through aviation-grade, military and low-power consumer grade single chip devices. Material will be presented from both a theoretical and practical perspective, with case studies as well as overviews of the latest commercial GNSS chipsets. The course includes severalMATLAB®demosdesignedtoenhanceunderstanding of concepts. For those wishing to follow along in class, the GNSS software receiver toolboxusedisavailablethroughtheinstructor’sblog(ChameleonChips.com; min system requirements: Windows®OSandMATLAB2007b).Thissection(Part 1) covers the design of GNSS RF front-ends fromLNAtoADC.Topicstobecoveredinclude:•OverviewofreceivedGNSSsignals:Link
budget and system noise figure, signal structures, PSD, spreading codes and their auto and cross-correlation properties.
•Front-endarchitectures: Superheterodyne vs. direct conversion, analog vs. digital downconver-sion, baseband vs. IF sampling, and direct RF sampling. Guidelines for selecting appropriate front-end architecture for given application.
•Frequencyplanningandcontrol: image frequencies, bandwidth and filter selection, referenceclocktypesandparameters,PLLsynthesizers, and cost-performance tradeoffs.
•RF/IFcomponentparametersimportantforGNSSapplications including selection guidelines.
•Implementationintricacies: Factors affecting the performance of GNSS receivers such as passband group delay variation and component-induced multipath.
•Samplingsubsystem: AGC, ADC specifications and dynamic range considerations.
•Front-enddesignconsiderationsforexpectedlevels of in-band and adjacent-band interference.
•GNSSfront-endimplementationoptionsincludingPCB-level design and commercial GNSS MMICs.
•Sampleprocessingandanalysisdemonstra-tionsfor actual GNSS receiver front-ends of various center frequencies, bandwidths, sampling schemes and bit depths.
Course Level: Beginner to Intermediate
Dr. Sanjeev Gunawardena is a research assistant professor with the Autonomy & Navigation Technology (ANT) Center at the Air Force Institute of Technology. Previously he was a senior research engineer and principal investigator with the Ohio University Avionics Engineering Center (AEC), where he served as lead developer of multi-frequency instrumentation-grade GNSS receiver front-ends, FPGA-based next-generation GNSS processors, and multi-sensor data collection systems for scientific research. He received the 2007 RTCA William E. Jackson Award for outstanding contribution to aviation for the application of transform-domain technology for high-fidelity GNSS performance monitoring. Dr. Gunawardena received a BS in engineering physics, and a BSEE, MSEE and PhD EE from Ohio University.
continued

Dr. Frank van Graas is a Fritz J. and Dolores H. Russ Professor of Electrical Engineering at Ohio University, where he has been on the faculty since 1988. He is an ION past president (1998–'99) and currently serves as the ION treasurer. He served as the ION's Executive Branch Science and Technology Policy Fellow at NASA (2008-2009 academic year). At Ohio University his research includes GNSS, inertial navigation, low-frequency signals,LADAR/EO/IR,surveillanceandflighttest.He is an ION Fellow and has received the ION's Kepler (1996), Distinguished Service (1999), Thurlow (2002), and Burka (2010) awards.
Real-Time Kinematic (RTK) PositioningThis course begins with a description of relative, carrier-phase positioning, including the concepts of measurement differencing and observable linear combinations. Functional and stochastic model parameterizations, error modeling, filtering and position solution performance will be presented. The Real-Time Kinematic (RTK) GNSS measurement processing technique is then introduced, including RTK equipment set-up and usage scenarios. A detailed summary of carrier-phase ambiguity resolution and its application to allow for RTK positioning is then given. Positioning performance with various measurement inputs andmodes(static,kinematic,single-/dual-frequency,single-/multi-constellation)willbeinvestigated and illustrated with examples. The course will conclude with the extension of baseline RTK to the network RTK strategy, including the necessary reference and user station modeling, filtering and positioning performance.
Course Level: Beginner to Intermediate
Dr. Sunil Bisnath is an associate professor of Geomatics Engineering, Department of Earth and Space Science and Engineering,LassondeSchoolofEngineering,YorkUniversity,Toronto, Canada. His research interests include precise GNSS positioning and navigation algorithms and applications. Sunil previously held positions at the Harvard-Smithsonian Center for Astrophysics, Boston, and the University of Southern Mississippi, NASA Stennis Space Center. He holds a BSc and MSc from the University of Toronto, and a PhD from the University of New Brunswick.
Fundamentals of GNSS 2: GPS EmphasisThis course covers the fundamentals of GNSS with major emphasis on GPS regarding user functions, solutions, and performance. The core functions that need to be performed in obtaining a user solution using GPS in an error free environment will initially be explained. Atmospheric effects from the ionosphere and troposphere as well as error mitigation techniques will be covered from a stand-alone and differential perspective. A case study using real GPS data will be used throughout the course to illustrate user state solution and performance metrics (i.e., error, DOPs) for stand-alone (without atmospheric corrections), with atmospheric correct-ions, and differential positioning. Topics to be covered include:•GNSSObservables: code, carrier, and date
formats: RINEX, NMEA, and manufacture unique formats
•CalculationoftheGPSspacevehicle(SV)position using the broadcast Kepler parameters (ephemeris and almanac)
•SVclock,relativistic,andsingle-frequencycorrections
•Transittime(i.e.,Earthrotation)correction•GPSTimeConsiderations: GPS week number,
time of week, local time, UTC and the leap second•Calculationofuserstate(i.e.,position,velocity,
and time): Ordinary-least squares solution •Associatedusersolutionperformanceparameters
(i.e., dilution of precision terms)•CaseStudy: Stand-alone performance illustration
(no atmospheric corrections) •AtmosphereErrors(“stand-alone”perspective):
Ionosphere error sources and characterization, models and mitigation; Troposphere error sources and characterization, models and mitigation; Case Study: Stand-alone performance illustration (with atmospheric corrections)
•GPSerrorbudget•Errorcharacterizationfora“stand-alone”user:
Satellite orbit and clock errors; Signal multipath error characterization, analysis, and mitigation techniques; Code-minus-Carrier Analysis ; Smoothing
•GeneralTypesofAugmentation;(PPP,A-GPS,DGNSS)
•DifferentialGNSSanddifferentwaystoimplementit: Correction-based methods (Illustrated DGPS examples); Measurement-based methods; Single, double, and triple differencing techniques
•CaseStudy: DGPS performance illustration
Course Level: Beginner to Intermediate (This course is more advanced than a simple user's introductory course; but not too detailed for the beginner.)
Dr. Chris G. Bartone, P.E. is a professor at Ohio University with over 30 years of professional experience. He received his PhD EE from Ohio University, a MSEE from the Naval Postgraduate School, and BSEE from Penn State. He previously worked for the Naval Air Warfare Center, performing RDT&E on CNS systems. Dr. Bartone has developed and teaches a number of GPS, radar, wave propagation and antenna classes. His research concentrates on all aspects of navigation.
GNSS Receiver Design 2: Baseband Signal Processing and ImplementationThis is the second of a two-part sequence covering the design and practical implementation of GNSS receivers using the latest RF and digital signal processing technologies. Topics to be covered are applicable to a wide range of GNSS user equipment design from reference receivers through aviation-grade, military and low-power consumer grade single chip devices. Material will be presented from both a theoretical and practical perspective, with case studies as well as overviews of the latest commer-cial GNSS chipsets. The course includes several MATLAB®demosdesignedtoenhanceunderstandingof concepts. For those wishing to follow along in class, the GNSS software receiver toolbox used is available throughtheinstructor’sblog(ChameleonChips.com; min system requirements: Windows® OS and MATLAB2007b).Thissection(Part2)coversdigitalsignal processing from sample correlation through the formation of range measurements. Also covered are implementation techniques using dedicated hardware, programmable logic (FPGA), GPU, and CPU, includinghardware/softwarepartitioningstrategies.Topics to be covered include:•OverviewofreceivedGNSSsignals: Signal
structuresofGPS,GLONASS,Galileo,BeiDou, QZSS and IRNSS.
•Correlationprocessing: Time, frequency and transform-domain techniques. Advanced correlator architectures for multipath mitigation and signal deformation monitoring.
•Complexityreductionforrealtimeimplementationand impacts thereof.
•Signalacquisitionalgorithms,rapidacquisitiontechniques,transitiontotracking,bit/symbolsynchronization, and state machine-based low-level channel control.
•Tracking:FLL/PLLandDLL,carrieraidedcode,inter-frequency aiding, loop tightening techniques, noise bandwidth, tracking performance, block (batch) processing and open-loop tracking techniques.
•Measurementcomputation:Navdataextraction/decoding,TOT/TORregisters,andformationofpseudorange and carrierphase.
• ImplementationtechniquesandplatformsfromMATLAB®todedicatedhardware.
•Softwaresignalacquisitionandtrackingdemosfor: GPS(L1-C/A,L2C,andL5),GLONASS(L1andL2),Galileo(E1B/C,E5a,andE5b),BeiDou(B1IandB2I) and QZSS.
Course Level: Beginner to Intermediate
Dr. Sanjeev Gunawardena is a research assistant professor with the Autonomy & Naviga-tion Technology (ANT) Center at the Air Force Institute of Technology. Previously he was a senior research engineer and principal investigator with the Ohio University Avionics Engineering Center (AEC), where he served as lead developer of multi-frequency instrumentation-grade GNSS receiver front-ends, FPGA-based next-generation GNSS processors, and multi-sensor data collection systems for scientific research. Dr. Gunawardena received a BS in engineering physics, and a BSEE, MSEE and PhD EE from Ohio University.
ION
GN
SS+ 2015 TU
TO
RIA
LS – Monday, Septem
ber 14
Monday Afternoon1:30 p.m. – 5:00 p.m. TUTORIALS – Monday Evening, September 14 – 6:00 p.m. – 9:30 p.m.
Kalman Filter Applications to Integrated Navigation 1 continued

ION
GN
SS+ 2015 TU
TO
RIA
LS – Monday, Septem
ber 14
Kalman Filter Applications to Integrated Navigation 2Integration of GPS with an Inertial Measurement Unit(GPS/IMU)isusedtoillustratetheapplicationof Kalman Filtering to integrated navigation. The course starts with a brief summary of the Kalman Filter followed by the steps required to implement the filter, including the selection of the state variables, observability, error sources, sensor bandwidth, update rate, time synchronization, lever arm, and identification of the noise processes. At the conclusion of the course, participants should be able to understand the underlying principles that lead to the successful design and implementation of Kalman filters for integrated navigation applications. The approach presented offers a major benefit enabledbyadeparturefromotherIMU/satnavintegrations. Precise carrier phase observations one second apart provide streaming velocity for dead reckoning, yielding huge improvement in multiple aspects of performance (robustness, integrity, interoperability, immunity to belowmask ionospheric and tropospheric degradations, etc.). Flight-verified cm/secvelocityperformance,includinganinstanceof zero elevation above horizon, is shown. Of crucial significance, integration with a low-cost IMU is shown to be sufficiently dramatic to conclude that there is little reason not to use it.
Course Level: The course is designed to follow Kalman Filter Applications to Integrated Navigation 1 and Inertial Navigation, and will also be of benefit to intermediate-level attendees who are familiar with filtering concepts and inertial navigation principles.
Dr. James L. Farrell is an ION Fellow and author of over 80 journal and conference manuscripts. He authored Integrated Aircraft Navigation (Academic Press, 1976) and GNSS Aided Navigation and Tracking (2007). His technical experience includes teachingappointmentsatMarquetteandUCLA,Honeywell, Bendix-Pacific, and Westinghouse in design,simulation,andvalidation/testformodernestimation algorithms in navigation and tracking applications, and digital communications system design.AspresidentandtechnicaldirectorofVIGILINC. he has continued his teaching and consulting on inertial navigation and tracking for private industry, DOD, and university research.
Dr. Frank van Graas is a Fritz J. and Dolores H. Russ Professor of Electrical Engineering at Ohio University, where he has been on the faculty since 1988. He is an ION past president (1998- '99) and currently serves as the ION treasurer. He served as the ION's Executive Branch Science and Technology Policy Fellow at NASA (2008-2009 academic year). At Ohio University his research includes GNSS, inertial navigation, low-frequencysignals,LADAR/EO/IR,surveillanceandflight test. He is an ION Fellow and has received the ION's Kepler (1996), Distinguished Service (1999), Thurlow (2002), and Burka (2010) awards.
Precise Point Positioning (PPP) This course will begin with the development of the Precise Point Positioning (PPP) GNSS measurement processing technique. A detailed treatment of the data processing mathematical models will follow, focusing on the parameterization of functional and stochastic models. Descriptions of the necessary error modeling will be given, including a discussion of solution sensitivity. The requisite sequential data filtering mathematics will be provided with examples. Positioning performance with various measurement inputs and modes (static, kinematic, single-/dual-frequency,single-/multi-constellation)will be investigated and illustrated with examples. Current scientific and commercial applications will be reviewed. Recent data processing advances will be described. The course will conclude with a discussion of the future prospects for the PPP technique.
Course Level: Beginner to Intermediate
Dr. Sunil Bisnath is an asso-ciate professor of Geomatics Engineering, Department of Earth and Space Science and Engineering,LassondeSchoolofEngineering,YorkUniversity,Toronto, Canada. His research interests include precise GNSS positioning and navigation algorithms and applications. Sunil previously held positions at the Harvard-Smithsonian Center for Astrophysics, Boston, and the University of Southern Mississippi, NASA Stennis Space Center. He holds a BSc and MSc from the University of Toronto, and a PhD from the University of New Brunswick.
TUTORIALS – Monday Evening, September 14 – 6:00 p.m. – 9:30 p.m. TUTORIALS – Monday Evening, September 14 – 6:00 p.m. – 9:30 p.m.

TUTORIALS – Tuesday Morning, September 15 – 9:00 a.m. – 12:30 p.m.
ION
GN
SS+ 2015 TU
TO
RIA
LS – Tuesday, September 15
Introduction to Multi-Constellation GNSS SignalsThis course provides an overview of multi-constellation GNSS signals. Digital modulation techniques used for satellite navigation systems will be described, including a discussion of important characteristics such as pseudorandom noisecodes,autocorrelation/cross-correlationproperties, power levels, and polarization. Common features found in modern GNSS signal designs will be introduced, including dataless (pilot) components, square-wave subcarriers, secondary codes, forward error correction, and error detecting coding. The present and future signals of the Global PositioningSystem(GPS),includingC/A-code,P(Y)-code,L2civil(L2C),L5,M-code,andL1civil(L1C)willbedetailed,aswillthesignalsforGLONASS,GALILEO,BeiDou,satellite-basedaugmentationsystems (SBAS), and other emerging satellite navigation systems. This class is intended for anyone with an interest in better understanding multi-constellation GNSS signals, including researchers, design engi-neers, application developers, end-users, systems engineers, managers and executives. Attendees are assumed to have a familiarity with the basic concepts of satellite navigation.
Course Level: Beginner to Intermediate
Dr. Christopher J. Hegarty is the Director for CNS Engineering & Spectrum with The MITRE Corporation. He is thechairofRTCA’sProgramManagement Committee, co-chair of RTCA Special Committee159,andassociateeditor of NAVIGATION. He was therecipientofthe2005IONJohannesKeplerAward, and served as ION President in 2008. He is a Fellow of the ION, the IEEE, and the co-author of Understanding GPS: Principles and Applications, 2nd Edition.
Ubiquitous PositioningOver $1 trillion of the US economy and over €800 billion of the European economy are dependent on GNSS for positioning or timing solutions. However, we typically spend over 80% of our time indoors, where GNSS does not yet penetrate. The global indoor location-based market is also expected to exceed $10 billion by the end of this decade. The aim of a ubiquitous positioning system is to provide a tracking solution in all environments. Highly-reliable ubiquitous positioning systems must not just cover indoor and outdoor operations, but must also be capable of providing outdoor tracking solutions when traditional GNSS receivers are experiencing jamming or spoofing. This short course will open with an overview of the current commercial and military technologies that aim to address the ubiquitous positioning problem by providing multiple, redundant, indoor and outdoor positioning capabilities. The step-by-step development of a fully-functioning ubiquitous positioning system based around a smartphone sensor platform, particlefiltering,andSimultaneousLocalisationandMapping(SLAM)willthenbedemonstrated.While no knowledge of programming will be assumed for the course, the attendee will be provided with all the information needed to
develop their own cutting-edge smartphone-based self-learning ubiquitous tracking system. We will also cover the benefits that can be provided by adding peripherals such as a low cost software-defined radio to a smartphone-based system. The course will wrap up with a look at some of the future technologies in this space that are currently under development by a range of technology providers.
Course Level: Beginner to Intermediate
Dr. Ramsey Faragher is an expert in GNSS-denied positioning, sensor fusion, and machine-learning. He is currently a senior research associate at the University of Cambridge, a Fellow of the Royal Institute of Navigation and a Bye Fellow ofQueens’College,Cambridge.Previouslyhewasa principal scientist at BAE Systems where he developed the NAVSOP opportunistic positioning suite and other GNSS-denied tracking technologies for manned and autonomous platforms in the land, air and sea domains.
Inertial Navigation: Sensors, Algorithms, and Performance In this overview course, the student will learn the fundamentals of inertial navigation sensors and systems and strategies for integrating these sensors into multi-sensor navigation systems. The course begins with an introduction to inertial navigation and a discussion of accelerometer and gyroscope design, operation, and error sources. Next, the applicable coordinate frames are presented and the WGS-84 Earth Model is explained. Strapdown mechanization algorithms are developed along with applicable error models. Strategies for integrating inertial sensors with other sensors are presented and compared including various position, velocity, and attitude update examples. Both feed-forward and feedback Kalman filters are compared. Concepts are illustrated using multiple Matlab- based examples, which are provided to each student via online access. The course concludes with a discussion of future technology develop-ments and their impacts on the field.
Course Level: This course will be presented at a conceptual level and is appropriate for engineers, managers, and executives in the navigation and military industries who are interested in inertial navigation techniques and strategies for implementing these methods into existing products.
Dr. Mike Veth is the co-founder of Veth Research Associates. His research focus is applying nonlinear estimation theory to optimally fuse inertial sensors with non-traditional navigation sources for truly robust non-GNSS navigation and control applications. He received his BS in Electrical Engineering from Purdue University and a PhD in Electrical Engineering from the Air Force Institute of Technology. He has served the ION as Eastern Region vice president, Dayton Section president, session chair, track chair, and program chair. Dr. Veth has authored over 40 technical articles and book chapters in areas relating to computer vision,
navigation, and control theory. He is a member of the ION, a Senior Member of the IEEE, and a graduate of the US Air Force Test Pilot School.
Introduction to GNSS Remote Sensing: Reflectometry and Radio Occultation Recent developments and the current state of the art in Earth remote sensing using reflected (GNSS-R) and occulted (GNSS-RO) signals. GNSS signals experience attenuation, delay spread, and polarization change upon reflecting from ocean, terrain, or ice surfaces. These changes are dependent on a number of variables, including ocean winds, soil moisture, vegetation and ice classification. Variation in the atmospheric index of refraction bends the GNSS signal path during rising or setting occultations as a function of the temperature and moisture profile. GNSS-R experiments were first conducted from aircraft (1998-2002), followed by the UK-DMC satellite demonstration in 2004. Recently, NASA selectedtheCYGNSSconstellationtoobservetropical storm development and ESA selected the PARIS In-Orbit Demonstrator for satellite altimetry. Approval of these missions begins the transition of GNSS-R from experimental proof of concept to operational remote sensing. GNSS-RO has been operational on the COSMIC constellation since 2006, providing important data for global weather forecast models. Occultation measurements from aircraft have been recently demonstrated. Both methods enable many types of variables to be measured to be made using small, low-cost receivers with low-profile patch antennas, due to the reutilization of the highly stable GNSS signal. This tutorial is intended for anyone interested in the measurements obtainable from GNSS-R or GNSS-RO for potential application within their own field. It is also appropriate for GNSS systems engineers who desire to identify technology needs and trends in developing new instruments, algorithms, and missions to support future applications of these promising new remote sensing techniques. A basic understanding of how GNSS works is desirable. In order to make this material accessible to the widest engineering and scientific audience, the tutorial will be based around physical argu-ments with a minimum of mathematical derivation. A bibliography will be provided to students interest-ed in learning more.
Course Level: Beginner
Dr. James Garrison is an associate professor of Aeronautics and Astronautics at Purdue University. He earned a PhD from the University of Colorado and is the author or co-author of 26 journal articles, 54conferenceproceedings,6 US Patents, and the chair of GNSS+R 2012. He has received several awards, including a NASA New Investigator grant and the ION EarlyAchievementAward.Prof.Garrison’sresearchis in remote sensing using GNSS and signals of opportunity.

ION
GN
SS+ 2015 TU
TO
RIA
LS – Tuesday, September 15
Autonomous Navigation and Smart VehiclesDuring the last few years, fully autonomous ground vehicles have seen some limited operation but created a lot of excitement. Research and testing is continuing, and most car companies have announced their intent to have self-driving cars in the market by 2020. To be able to drive autonomously a ground vehicle is expected to do self-sensing (basically speed and acceleration), sensing with respect to some absolute coordinate system (usually using GPS, with possibly the help of a map data base) and sensing with respect to the immediate environment (with respect to lane markings, special indicators on the road, obstacles, other vehicles, etc.) Thus one important capability an autonomous vehicle needs to have is autonomous navigation. In this tutorial we shall focus on the navigation aspect of self-driving smart vehicles. We shall review the sensing and sensor fusion issues and the mapping needs of single vehicles. We shall discuss the capabilities brought by vehicles collaborating and sharing information through real-time com-munication. We shall be drawing from many examples our group has worked on during the last twenty years ranging from cars, off-road trucks and small, wheeled urban platforms.
Course Level: Beginner to Intermediate
Dr. Umit Ozguner is a professor of Electrical and Computer Engineering and the Director ofthe“CrashImminentSafety”University Transportation Center at OSU, funded by DoT. He is a Fellow of IEEE and was the first President of the IEEE ITS Council/Society.Teamshecoordinated participated successfully in the 1997 AHS Technology Demonstration, the DARPA 2004 and2005GrandChallenges,the2007UrbanChallenge and the 2010 Multi Autonomous Ground-robotic International Challenge.
GNSS Effects for AviationThis course will describe the use of Global Navigation Satellite Systems (GNSS) to support air navigation. Particular attention will be paid to challenges that can affect the availability and safety of GNSS based navigation. The currently operating systems that augment the Global Positioning System (GPS) will be described. These are Aircraft Based Augmentation Systems (ABAS), Ground Based Augmentation Systems (GBAS), and Satellite Based Augmentation Systems (SBAS). They support differing flight operations and different regions of operations. Each method is described in detail and how it overcomes the challenges to provide suitable guidance. The main GNSS feared events that must be overcome are satellite faults, ionospheric effects, tropospheric effects, and local reflections of the signals at the aircraft. This course will describe each effect in detail and how they are addressed by each augmentation system. Aircraft navigation is judged by four criteria: accuracy, integrity, continuity, and availability. How well each system performs on these metrics will be described. Emphasis will be placed on describing the feared events and the integrity monitors that prevent them from affecting the aircraft. The course will conclude with a discussion on the future direction of these augmentation systems utilizing new signals and new GNSS constellations.
Course Level: This course is suitable for all interested parties who have at least an introductory knowledge of satellite navigation. A brief review of the elements of GNSS most relevant to aug-mentation systems will be provided. No previous knowledge of differential GNSS, augmentation systems, or integrity algorithms is needed.
Dr. Todd Walter is a senior research engineer in the Department of Aeronautics and Astronautics at Stanford University. His research focuses on implementing high-integrity air navigation systems. He is active in the international standards bodies coordinating the use of Global Navigation Satellite Systems to implement these systems. He was awarded the ION Thurlow and Kepler awards. He is also a Fellow of the ION and has served as its president.
Robust and Resilient NavigationGNSS signals are so weak near the Earth's surface that they can be easily squelched by natural or man-made interference. Moreover, the most popular GNSS signals—those offered with unrestricted access—are unencrypted and (so far) unauthenticated, which means that they can be counterfeited, or spoofed. Strict international laws protect to the radio frequency bands allocated to GNSS, but Mother Nature does not respect these laws, and man-made interference—whether accidental or intentional—is a growing concern. This tutorial examines sources of GNSS signal interference and interference effects on GNSS signal tracking. It offers a systematic treatment of natural, unintentional, and intentional interference, with emphasis on intentional jamming and spoofing. Theoretical performance bounds are developed for the simplest cases of narrow-band and wide-band interference and for multi-access interference. The effects of interference on quantization performance, for one-bit and multi-bit quantization, and on carrier
phase tracking, are examined. Real-world case studies of the interference due to solar radio bursts, ionospheric scintillation, unintentional in-band harmonics, personal privacy devices, and to the University of Texas spoofer highlight the challenges involved in detecting and mitigating interference. Meaconing and spoofing are defined, and the so-called security code estimation and replay attack, a specialized replay attack, is examined in detail. The effect of coherence between a spoofer's signals and the authentic signals is noted. The tutorial offers a review of the state of the art in antenna-oriented and signal-processing-oriented interference detection and mitigation techniques, including received power monitoring, augmented received power monitoring, spectral analysis, filtering, blanking, and cryptographic spoofing detection.
Course Level: Beginner to Intermediate
Dr. Todd E. Humphreys is an assistant professor in the department of Aerospace Engineering and Engineering Mechanics at the University of Texas at Austin, and Director of the UT Radionavigation Laboratory.HereceivedaBS and MS in Electrical and Computer Engineering from Utah State University and a PhD in Aerospace Engineering from Cornell University. He specializes in applying optimal estimation and signal processing techniques to problems in radionavigation. His recent focus is on radionavigation robustness and security. He is a recipient of the ION Thurlow award and the NSF CAREER award.
Image Aided Inertial Navigation: Design, Analysis, and AlternativesThis course builds upon the concepts presented in Inertial Navigation: Sensors, Algorithms, and Performance and focuses on the rapidly growing area of image and video-based navigation techniques. The topics will include detailed descriptions of camera calibration and removal of image distortion, feature extraction techniques including: SIFT, SURF, FAST, ORB, and Shi-Tomasi, methods for solving the correspondence problem, and extracting navigation information including essential/fundamentalmatrixtechniquesaswell as feature tracking techniques and the inherent strengths and weaknesses of various feature types (e.g., lines vs. corners). Finally, strategies for extracting navigation information are presented including feature tracking, optical flow, and methods for coupling with inertial sensors. Strategies for implementing these algorithms using various software products including Matlab and OpenCV are presented as well as illustrations of real-time systems. Time will be provided for in-depth question and answer sessions as well as Matlab-based examples. Applicable references are provided for further study.
Course Level: This course will be presented at an engineering level with the goal of understanding the various components and algorithms required to construct a multi-sensor image-aided navi-gation system. The course is appropriate for engineers with experience in the navigation field
Tuesday Afternoon, September 15 – 1:30 p.m. – 5:00 p.m.
continued
Tuesday Morning9:00 a.m. – 12:30 p.m.

ION
GN
SS+ 2015 TU
TO
RIA
LS – Tuesday, September 15
TUTORIALS – Tuesday Afternoon, September 15 – 1:30 p.m. – 5:00 p.m.
with an interest in learning practical approaches for incorporating image observations into navigation systems.
Dr. Mike Veth is the co-founder of Veth Research Associates. His research focus is applying nonlinear estimation theory to optimally fuse inertial sensors with non-traditional navigation sources for truly robust non-GNSS navigation and control applications. He received his BS in Electrical Engineering from Purdue University and a PhD in Electrical Engineering from the Air Force Institute of Technology. He has served the ION as Eastern Region vice president, Dayton Section president, session chair, track chair, and program chair. Dr. Veth has authored over 40 technical articles and book chapters in areas relating to computer vision, navigation, and control theory. He is a member of the ION, a Senior Member of the IEEE, and a graduate of the US Air Force Test Pilot School.
GNSS for Smartphone NavigationThis tutorial is designed to provide an introductory level overview of the complete end to end archi-tecture for modern GNSS implementation in a smartphone. It will examine the various elements inside and outside the smartphone itself and how they affect overall navigation performance. This includes all the elements of hardware (RF, DSP and CPU) and software (signal processing, navigation, OS and application interfaces) inside a smartphone as well as the network elements for connectivity and cloud based data interaction. The course will examine fundamental dif-ferences in the 4 major GNSS satellite constellations signal structures and how they impact design of multi-GNSS receiver. Operating modes including acquisition strategies for both strong and weak signals as well as various tracking algorithms will also be discussed. Impact of new operating modes for low power operation and context awareness will also be covered. ImplicationsofMoore’sLawandoverallsilicondesign tradeoffs will be examined as they apply to GNSS. Architectural tradeoffs for both tracker and combined navigation engines will be examined as they apply to a variety of applications for automotive, pedestrian, and indoor navigation applications. The smartphone ecosystem will also be covered including the impact of operating systems, network aiding methodologies (A-GPS and A-GNSS) and application interfaces. A brief overview of the key market drivers including E9-1-1 and other government initiatives as well as commercial impactofe-commerceandvariousLBSserviceswill also be covered.
Course Level: Beginner to Intermediate
Mr. Greg Turetzky is the director of strategic business development for GNSS and location and a principal engineer in the Wireless Connectivity Solutions (WCS) group at Intel since 2013. He hasover25yearsofindustryexperience in defining and incorporating new GNSS capabilities and other location technologies for mobile platforms. He has been an active participant in the FCC E-911 process in several CSRIC working groups helping to push for indoor E-911 requirements. Prior to joining Intel, he has been in the GPS receiver design and applications business for over 20 years at CSR, SiRF Technology, Trimble Navigation, Stanford Telecommunications and the Applied Physics LaboratoryatJohnsHopkinsUniversity.Mr.Turetzkyholds a BA in Physics from Cornell University and an MS in Computer Science from Johns Hopkins University and several patents in GPS.
Guidance, Navigation and Control of Small UAVsSmall Unmanned Aerial Vehicles (SUAVs) present unique challenges when it comes to guidance, navigation and control. This is due to, in part, the severe size, weight, power and cost (SWAPc) constraints associated with these vehicles. In this short course we will discuss the challenges and some solutions to the GNC problem associated with SUAVs. Course shall include:1. Introduction: What are small UAVs? How are they
different from other aerial vehicles and what are the unique GNC challenges?
2. Applications of Small UAVs: remote sensing, mapping, avionics research and development
3. Operational Challenges: The process of obtaining a COA. Requirements for proper data logging, and application specific analysis tools
4. SUAV Flight Control System (FCS) Architectures5. GNCSystem: Requirements and design of
robust navigation, guidance and control systems for SUAVs.
Course Level: Beginner to Intermediate
Brian Taylor is the director of the University of Minnesota Uninhabited Aerial Vehicle (UAV)Laboratory.Hisresearchdeals with developing methods for accurately and efficiently modeling aircraft and aircraft components from experiment-al data. Prior to joining the University of Minnesota, he was a researcher at the NASA Armstrong where worked on a number of UAVs includingtheX-48B/C,X-56A,andtheSubsonicFixed Wing project. He was the deputy chief engineer for the X-48C.
Chris Regan is a research fellow with the University of Minnesota Uninhabited Aerial Vehicle(UAV)Laboratory.Chris’sresearch interests are centered on modeling and simulation of dynamic flight systems in the presence of uncertainty. Recently this work has relied
upon utilization of small sub-scale and purpose-built UAV airframes. From 2003 to 20012 he was a research engineer at NASA Armstrong Flight Research Center. He was the NASA Project Chief Engineer on the X-48B project. After leaving NASA in 2012, Chris worked for Boeing Commercial Airplane as a systems engineer.
Dr. Hamid Mokhtarzadeh is a postdoctoral associate at the University of Minnesota where he leads research on improved navigation and georeferenc- ing for UAV-based precision agriculture applications. In September of 2014 he received his aerospace engineering PhD, also from the University of Minnesota, for his research on estimators suitable for cooperative navigation in GNSS-stressed or denied environments.
Dr. Demoz Gebre-Egziabher is an associate professor in the Department of Aerospace Engineering and Mechanics at the University of Minnesota. His research deals with the design of multi-sensor navigation and attitude determination systems. He was the past secretary of the Satellite Division of the ION and has also served as associate editor of navigation for the IEEE Transactions on Aerospace and Electronic Systems. He is an associate fellow of the American Institute of Aeronautics and Astronautics (AIAA).
Image Aided Inertial Navigation: Design, Analysis, and Alternativescontinued

55th Meeting of the
Civil GPS Service Interface Committee
at the ION GNSS+ 2015 Conference Tampa Convention Center • Tampa, Florida
September 14 - 15, 2015
The CGSIC is open and free to all ION GNSS+ registrants
Monday, September 14, 2015
Morning Concurrent Subcommittees:
09:00 – 12:30, Rooms 24 and 25
1a. Timing Session: Dr. Wlodzimierz Lewandowski, ESA Navigation
Program Board, Chair
1b. Surveying, Mapping, and Geosciences Session:
Giovanni Sella, NOAA-National Geodetic Survey, Chair
Break: 10:20 – 10:40
Afternoon Concurrent Subcommittees:
14:00 – 17:30, Rooms 24 and 25
2a. International Information Session: John Wilde, DW International, Chair
2b. U.S. States and Local Government Session: James Arnold, U.S. Department of Transportation, Chair
Break: 15:20 – 15:40
Tuesday, September 15, 2015
CGSIC Plenary Session: 09:00 – 17:30, Room 24/25
08:00 Registration
09:00 Welcome/ Opening: Karen Van Dyke, U.S. Department of
Transportation, Chair, CGSIC
09:05 Meeting Overview: CAPT Russell Holmes, Commanding
Officer U.S. Coast Guard Navigation Center, Deputy Chair
09:10 Key Note Address: The Honorable Gregory D. Winfree, Assistant Secretary for Research and Technology, U.S. Department of Transportation
09:30 U.S. National Space-Based PNT Update: U.S. National
Coordination Office for Space Based PNT
09:50 GPS Program Update: U.S. Air Force GPS Directorate
10:10 GPS Constellation Status and Performance: U.S. Air
Force Second Space Operations Squadron
Break: 1030
10:45 GPS International Activities: U.S. Department of State,
Office of Space and Advanced Technology
11:10 U. S. Interference Detection & Mitigation Plan (IDM):
U.S. Department of Homeland Security
11:35 Q/A Panel
Lunch is on Your Own: 12:00 – 13:30
13:30 Subcommittee Reports:
• Report from International Information
Subcommittee: John Wilde, DW International
• Report from Timing Subcommittee:
Dr. Wlodzimierz Lewandowski, BIPM
• Report from U.S. States and Local Government
Subcommittee: James Arnold, DOT
• Report from Surveying, Mapping, and Geosciences
Subcommittee: Giovanni Sella, NGS
14:10 WAAS and LAAS Program Status: Federal Aviation
Administration, U.S. Department of Transportation
14:30 NDGPS Program Update: U.S. Department of
Transportation
14:50 User Support Forum
Break: 15:30
15:50 GPS User Perspectives
16:10 GPS User Perspectives
16:30 Q/A Panel (Presenters)
17:30 Adjourn
For an Updated Agenda Please See: http://www.gps.gov/cgsic/meetings/2015/
6

Welcome, Meeting Highlights and Introduction of Technical Chairs
ION GNSS+ 2015 General ChairDr. Terry Moore University of Nottingham, UK
ION GNSS+ 2015 Program ChairDr. Gary McGraw Rockwell Collins
Plenary SessionTuesday, September 15, 2015 6:30 p.m. — 8:30 p.m. Tampa Convention Center
Satellite Division Chair Dr. John Betz The MITRE Corporation
Keynote:Navigating Our Way Through the Solar System
Dr. James L. Green, Director, Planetary Science, NASA Headquarters
Over the last few decades, NASA has sent instrumented robotic probes to all of the planets in the Solar System, the moons of Jupiter and Saturn, asteroids, and comets. We have discovered beautiful, strange, mysterious and puzzling worlds. In the last several yearsalone,ourunderstandingoftheoriginandevolutionofoursolarsystemhaschangeddramatically.Literallyourfoundationsofknowledgehavebeenreestablished!Eventhesimplestofconceptsarenowbeingquestioned.Forexample,what’sbehindthedemotion of Pluto from being a planet to a dwarf planet? In this brief overview I will take you on a journey navigating our way through the Solar System showing you new worlds and new discoveries through the eyes of our planetary spacecraft.
Dr.GreenreceivedhisPh.D.inPhysicsfromtheUniversityofIowain1979andhasworkedatNASA’sMarshallSpaceFlight Center and Goddard Space Flight Center before becoming the Director of the Planetary Science Division at NASA Headquartersin2006.Hehaswrittenover110scientificpapersinvolvingvariousaspectsoftheEarth’sandJupiter’smagnetospheres. In 1988 he received the Arthur S. Flemming award given for outstanding individual performance in thefederalgovernmentandwasawardedJapan’sKotaniPrizein1996inrecognitionofhisinternationalsciencedatamanagement activities.
Program Overview by Track ChairsThespeakerswillbegivenfiveminuteseachtohighlightthekeyhottopicsthatwillbediscussedduringtheweek’spanels;toenticeyou to attend sessions from their track. It will be a fast and fun snapshot of what is happening in the world of GNSS+ and over the course of the conference.
Presenters:
Dr. Paul McBurney, GopherHush Corp.
Ms. Sandra Kennedy, NovAtel Inc., Canada
Dr. Andre Hauschild, German Aerospace Center, Germany
Dr. Zainab Syed, IvenSense, Canada
Dr. Olivier Julien, ENAC, France
Dr. Grace Gao, University of Illinois at Urbana-Champaign
A1: Mobile Platform Location Fusion TechnologiesDate: Wednesday, September 16, 2015Time: 8:30 AM - 12:15 PMRoom: Room 18
Chairs:Greg Turetzky, Intel CorporationDr. Eun-Hwan Shin, Samsung Semiconductor Inc.
8:35. A New Novel of Fuzzy Pedestrian Dead Reckoning for Indoor Positioning System Using Smartphone, Chao Li, Zhuqing Jiang, Chengkai Huang, Xinmeng Liu, Beijing University of Posts and Telecomm, China
8:57. Unconstrained Indoors Localization Scheme Based on Cooperative Smartphones Networking withOnboards Inertial, Bluetooth, WiFi and GNSS Devices, H.S. Maghdid and I.A. Lami, The University of Buckingham,UK
9:20. Design and Evaluation of Tightly-Coupled Integration of WiFi and MEMS Sensors in Smartphones, Y.Zhuang and N. El-Sheimy, University of Calgary, Canada
9:43. A Hybrid Smartphone Multi-sensor Wide-area Outdoor and Indoor Seamless Positioning Method, J. Jiao,Z. Deng, W. Liu, Navigation and Micro/Nano-Systems, Beijing University of Posts and Telecommunications, China; L.Xu, Beijing RTMAP Technology Co. Ltd., China; L. Yin, Navigation and Micro/Nano-Systems, Beijing University ofPosts and Telecommunications, China
10:40. Robust Integrated Indoor Navigation Using Consumer Device Sensors, Map Matching and WirelessPositioning, T. Li, J. Georgy, Z. Syed, W. Abdelfatah and C. Goodall, InvenSense Inc., Canada
11:03. Smartphone Based Indoor Navigation System Using Motion Recognition and Map MatchingTechnology, B. Shin, C. Kim, J. Kim, S. Lee, Korea Institute of Science Technology, South Korea; C. Kee, SeoulNational University, South Korea; T. Lee, Korea Institute of Science Technology, South Korea
11:26. Speed and Velocity Estimation Using a Smartphone Camera, B. Kazemipur, A. Al-Hamad, J. Georgy, Z.Syed, C. Goodall, Invensense, Canada
11:48. Vision-based Heading Misalignment Estimation for Portable Devices Using Head/Shoulder Detection , A.Al-Hamad, A. Ali, J. Georgy, and C. Goodall, Invensense, Canada
Alternate Presentations:Visual-Aided Pedestrian / GNSS Coupled Navigation Based on Bayesian Networks, G. Xuping, W. Dongyan,L. Xianghong, X. Ying, Y. Hong, Academy of Opto-electronics, China
1.
Using Pressure Sensors for Altitude Aiding with a Multi-constellation GNSS in Urban Environments, H.Tokura, N. Kubo, Tokyo University of Marine Science and Technology, Japan
2.
Indoor Radio Tomography via GNSS. Mass-Market Applications: Mobile Platform Location FusionTechnologies, C. Kurby, R. Lee, iPosi inc.; R. Matheson, Greenwood Telecommunications
3.
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss

B1: Land Based ApplicationsDate: Wednesday, September 16, 2015Time: 8:30 AM - 12:15 PMRoom: Room 19
Chairs:Steve Rounds, John Deere ISGJeff Wilson, STMicroelectronics
8:35. A New Approach of Integrity Monitoring for Land Vehicles Navigation in Urban Environment byAugmenting GNSS with a 3D City Model and Gyro/Odometer, M. Sahmoudi and K. Bin Ahmad, ISAE-SUPAERO,University of Toulouse, France
8:57. Assessment of the Benefit of Multiple GNSS Constellation use in Tokyo Downtown for FutureAutonomous Driving and Advanced Driver Assistance System, S. Kogure, JAXA, Japan; M. Hosoi, AISANTechnology Co. Ltd., Japan; N. Kubo, Tokyo University of Marine Science and Technology, Japan; T. Sakai, ElectronicNavigation Research Institute, Japan; S. Matsuoka, Satellite Positioning Applications promotion Center (SPAC), Japan
9:20. Development of FKP-DGPS Positioning Module with Low-priced GPS Receiver for Intelligent Vehicle, J.Kim, H. No, J. Song, C. Kee, Seoul National University, South Korea; M. Park, Global R&D Center, Mando corporation,South Korea
9:43. Health Monitoring of a Cable-stayed Footbridge using GPS, J.K. Ghosh, A. Goyal, R. Chowdhury, IndianInstitute of Technology, India
10:40. Vehicular and Pedestrian GNSS Integrity Algorithms and Results for Urban and Road EnvironmentsDeveloped After an Extensive Real Data Collection Campaign, E. Domínguez, C. Moriana, L. Bonardi, GMV,Spain; E. Aguado, D. Lowe, M. Pattinson, M. Hutchinson, NSL, UK; G. Seco-Granados, J. A. Lopez-Salcedo, D. Egea,UAB, Spain; D. Naberezhnykh, TRL, UK; F. Dovis, Politecnico di Torino, Italy; J.P. Boyero, I. Fernandez EuropeanCommission, Belgium
11:03. Generation and Evaluation of the Track Map Database for GNSS-based Train Positioning Using aMap-tool-chain, J. Wang, B-G. Cai, J. Liu, W. Shangguan, Beijing Jiaotong University, China
11:26. Optimal Selection of an Inertial Sensor for Cycle Slip Detection by Considering INS Output Errors, Y.Kim, J. Song, C. Kee, B. Park, Seoul National University, South Korea
11:48. The use of GNSS to Monitor the Relative Movements of the Severn Bridge’s Towers and SuspensionCables, related to the Weigh In Motion Data, G.W. Roberts, X. Tang, The University of Nottingham, China; C.Brown, Brunel University London, UK
Alternate Presentations:An Alternative Method for Point Positioning in Forested Area, N. Tunalioglu, A. Pirti, T. Öcalan, R. GürselHosbas, Yildiz Technical University, Turkey
1.
High Precision RTK Positioning under Canopy Environments, X. Luo, F. Hurter, B. Richter, A. Cole, F. Takac,Leica Geosystems AG, Switzerland
2.
Track Selective Railway Navigation Using a Map based Sequential Fusion of GNSS and InertialMeasurements, A. Grosch, I. Martini, O. Garcia Crespillo, O. Heirich, and C. Günther, German Aerospace Center(DLR), Germany
3.
The Perspective of Adopting the GNSS for the Evolution of the European Train Control System (ERTMS): ARoadmap for a Standardized and Certifiable Platform, A. Neri, Radiolabs, Italy; F. Rispoli, Ansaldo STS, Italy; P.Salvatori, University of Roma TRE, Italy
4.
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss

C1: PANEL: Status of GPS, GLONASS, Galileo, BeiDou, IRNSS and QZSSDate: Wednesday, September 16, 2015Time: 8:30 AM - 12:15 PMRoom: Room 24/25
Chairs:Dr. John Betz, The MITRE CorporationDr. José Ángel Ávila Rodríguez, ESA, The Netherlands
This session provides an update on satellite-based navigation systems in operation or under development. Arepresentative for each system will provide a system overview, summarize current or planned characteristics andperformance, report recent programmatic events, update schedule and plans, and summarize ongoing interactionswith other service providers. Questions from the audience are encouraged.
8:35. GPS: Brigadier General William Cooley, Commander, GPS Directorate (Invited), GPS: Brigadier GeneralWilliam Cooley, Commander, GPS Directorate (Invited)
8:57. GLONASS: Representative of Federal Space Agency (Roscosmos), Russia (Invited), GLONASS:Representative of Federal Space Agency (Roscosmos), Russia (Invited)
9:20. Galileo Program Status: Mr. Eric Chatre, European Space Agency, Belgium; Mr. Marco Falcone,European Space Agency/ESTEC Galileo System Manager, The Netherlands, Galileo Program Status: Mr. EricChatre, European Space Agency, Belgium; Mr. Marco Falcone, European Space Agency/ESTEC Galileo SystemManager, The Netherlands
9:43. BeiDou: Representative of China Satellite Navigation Office (to be determined), China, BeiDou:Representative of China Satellite Navigation Office (to be determined), China
10:40. QZSS: Mr. Yoshiyuki Murai, Executive Director, Promotion of QZSS Utilization, Quasi-Zenith SatelliteSystem Services Inc., Japan, QZSS: Mr. Yoshiyuki Murai, Executive Director, Promotion of QZSS Utilization,Quasi-Zenith Satellite System Services Inc., Japan
11:03. IRNSS: Representative of India Space Research Organization, India (Invited), IRNSS: Representative ofIndia Space Research Organization, India (Invited)
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss

D1: Next Generation Multisensor Applications and TechniquesDate: Wednesday, September 16, 2015Time: 8:30 AM - 12:15 PMRoom: Room 21
Chairs:Dr. Chris Rizos, University of New South Wales, AustraliaDr. Kai-Wei Chiang, National Cheng Kung University, Taiwan
8:35. ASSIST: And Advanced Snow Plough and Salt Spreader Based on Innovative Space BasedTechnologies, A. Defina, Microsoft Innovation Center Torino, Italy; A. Favenza, G. Falco, D. Orgiazzi, IstitutoSuperiore Mario Boella, Italy
8:35. A Novel Filtering Mechanism to Improve the Performance of GPS/MEMS Gyro Attitude Determination forNEO Satellite, Fuxiang Cao, Kay Soon Low, Keck Voon Ling, Eng Kee Poh, Chin Siong Lim, Guo Xiong Lee, NanyangTechnological University, Singapore
8:35. Dynamic Stochastic Modeling of Inertial Sensors for INS/GNSS Navigation, M. Wis, Deimos Space, Spain;I. Colomina, GeoNumerics, Spain
8:35. An Enhanced Ultra-tightly Coupled GPS/Reduced MEMS IMU for Land Vehicles in ChallengingEnvironments, H.Y. Elghamrawy, M. Attia, M. Youssef, A. Noureldin, Queen's University, Canada
8:35. Compressed Sensing Based Reduced Order Kalman Filter for Navigation, S-Y. Jeon and S-H. Kong,KAIST, South Korea
8:35. Pilot-Assisted INS Aiding Using Bearing-Only Measurements Taken Over Time, A.T. Mirabile, M. Pachter,Air Force Institute of Technology
8:35. Enhancing the Probability Models for Inference of Significant Activities Using a Real-time LearningMachine in Smartphone, K. Liu, China University of Mining and Technology, China & Texas A&M University CorpusChristi; R. Chen, T. Chu, Texas A&M University Corpus Christi; Y. Wang, China University of Mining and Technology,China
8:35. Automatic and Computationally Efficient Method For Model Selection In Inertial Sensor Calibration, R.Molinari, University of Geneva, Switzerland; J. Joseph Balamuta, S. Guerrier, University of Illinois atUrbana-Champaign, USA; J. Skaloud, Ecole Polytechnique Federale de Lausanne, Switzerland
8:35. A Computationally Efficient Platform for Inertial Sensor Calibration, J.J. Balamuta, University of Illinois atUrbana-Champaign, USA; R. Molinari, University of Geneva, Switzerland; S. Guerrier, University of Illinois atUrbana-Champaign, USA; J. Skaloud, Ecole Polytechnique Federale de Lausanne, Switzerland
8:35. Development of a Micro-Mobility Analysis System Using Precise GNSS Traces, S. Mukherji and T.E.Humphreys, The University of Texas at Austin
8:35. Kalman Filter with Hard and Soft Constraints for the Integration of Multiple Pedestrian NavigationSystems, H. Lan, C. Yu, N. El-Sheimy, University of Calgary, Canada
8:35. Experimental Verification of FDE Performance and State Error Bounds in PNT Systems for MaritimeApplications, L. Lança, M. Romanovas, R. Ziebold, German Aerospace Centre (DLR), Germany
8:35. Snowplow Competition , TBD
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss
E1: Advanced Technologies in High Precision GNSS Positioning 1Date: Wednesday, September 16, 2015Time: 8:30 AM - 12:15 PMRoom: Room 22
Chairs:Dr. Jaume Sanz Subirana, Polytechnic University of Catalonia, SpainDr. Simon Banville, Natural Resources Canada, Canada
8:35. Long Baseline Relative Positioning Using RTK Measurement Filtering and PPP, G. Seepersad, J. Aggrey,M. Gill, and S. Bisnath, York University, Canada; D. Kim, H. Tang, University of New Brunswick, Canada; GeminiNavsoft Technologies Inc
8:35. A Novel Comprehensive Regularization and LSVCE Approach to Kinematic Satellite Relative NavigationUsing Beidou Naivgation System, H. Wei, P. Chen, L. Shu, X. Sun, BeiHang University, China
8:35. Triple-frequency BDS and Dual-frequency GPS Combination RTK Algorithm for Moving Baseline RelativePositioning, S. Zhao, F. Guan, X. Cui, Z. Yao, M. Lu, Tsinghua University, China
8:35. Integration of Inertial Navigation into Real-Time GIPSY-x (RTGx), J. Gross, R. Watson and V. Sivaneri, WestVirginia University; Y. Bar-Sever, Jet Propulsion Laboratory
8:35. On the Feasibility of Centimeter-Accurate Positioning via a Smartphone's Antenna and GNSS Chip, T.Humphreys, The University of Texas at Austin; K. Pesyna, Radiosense; F. Van Diggelen, Broadcom
8:35. Fault Free Integrity of Mid-Level Voting for Triplex Differential GPS Solutions, G.N. Green, University ofTexas at Austin; M. King, NAVAIR; T. Humphreys, University of Texas at Austin
8:35. eRAIM Fault Detection and Removal, P. Roysdon, UC Riverside; Y. Chen, Qualcomm; J. Farrell, UC Riverside
8:35. Compressive Sensing Approach for the Anomalous Measurements Detection. Experimental andComparison Results, L. Rapoport, Institute of Control Sciences, Russian Academy of Science, Russia
8:35. Low-Cost Precise Positioning Using a National GNSS Network, M. Kirkko-Jaakkola, S. Söderholm, S.Honkala, H. Koivula, S. Nyberg, and H. Kuusniemi, Finnish Geospatial Research Institute FGI, National Land Survey,Finland
8:35. New Instantaneous and Controllable Integer Aperture Estimation with Difference Test: Principle andApplication, J. Zhang, M. Wu, T. Li, National University of Defense Technology, China
8:35. Performance Evaluation of the Bayesian Ambiguity Resolution Technique (BART) for GPS DifferentialPositioning, J.G. Garcia, P.A. Roncagliolo, C.H. Muravchik, Universidad Nacional de La Plata (UNLP), Argentina
8:35. Aided GPS Integer Ambiguity Resolution Using Measurements From Low-cost Motion Sensors forPrecise Land Vehicle Navigation, T.B. Karamat, M.M. Atia, Royal Military College of Canada; M. Karaim, Queen'sUniversity, Canada; A. Noureldin, Royal Military College of Canada
8:35. Improved PPP Ambiguity Resolution by a Cascaded Method of Separating Orbit Errors from SatelliteFCBs, Y. Li, University of Calgary, Canada
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss
F1: GNSS Vulnerabilities and Anti-jammingDate: Wednesday, September 16, 2015Time: 8:30 AM - 12:15 PMRoom: Room 23
Chairs:Dr. Todd Humphreys, University of Texas at AustinDr. Andriy Konovaltsev, German Aerospace Center (DLR), Germany
8:35. Cloud-based Localization of GNSS Jammers, J.A. Garcia-Molina, M. Crisci, European Space Agency/ESTEC,The Netherlands
8:35. The DME Interference Mitigation Performance with the Karhunen-Loève Transform, A. Szumski, T. Kraus,B. Eissfeller, University FAF Munich, Germany
8:35. Atomic Clock Aided Receiver for Improved GPS Signal Tracking in the Presence of WidebandInterference, S. Stevanovic, M. Joerger, S. Khanafseh and B. Pervan, Illinois Institute of Technology
8:35. FM Jammer Suppression in GPS Receivers Exploiting Sparsity and Chirp Signal Approximations, M.G.Amin and Y.D. Zhang, Villanova University
8:35. Multi-Sensor Excision of Sparsely Sampled Nonstationary Jammers for GPS Receivers, Y.D. Zhang andM.G. Amin, Villanova University
8:35. Single-element Patch Antenna with Pattern Control, C. Bartone and J. Schopis, Ohio University
8:35. Vulnerability Analysis of L1 GNSS Signals to Different Types of Interference Signals, A. Jafarnia-Jahromi,A. Broumandan, S. Daneshmand, G. Lachapelle, University of Calgary, Canada
8:35. EGNOS Service Performances Degradation Because Environmental Signal Perturbations, F. Dufour,CNES, France; O. Hugues, Telespazio, France; J. Chamard, Abbia, France; J. Samson, ESA; C. Alexandru Pandele,ESA/ISS; S. Buehler, ESA
8:35. Threats to GNSS and the Cyber-dimension, G. Buesnel, D. De Santo, J. Pottle, Spirent Communications, UK
8:35. The Importance of Using Realistic GNSS Threat Scenarios to Test for Robustness in PNT userEquipment, G. Buesnel, J. Pottle, and R. Boyles, Spirent Communications, UK
8:35. A Comparative Analysis of Adaptive Notch Filtering and Wavelet Mitigation Against JammersInterference, L. Musumeci and F. Dovis, Politecnico di Torino, Italy
8:35. A Comparison of Analog and Digital Nulling Techniques for Multi-Element Antennas in GNSS Receivers, J.T. Curran, M. Bavaro & J. Fortuny, European Commission, JRC, Institute for the Protection and Security of theCitizen, Italy
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss

A2a: PANEL: Indoor Location and DemonstrationsDate: Wednesday, September 16, 2015Time: 1:45 AM - 5:30 AMRoom: Room 13/16
Chairs:Dr. Jari Syrjärinne, HERE, FinlandDr. Chris Goodall, InvenSense, Canada
See live demos from each of the panelists, showing the latest indoor location technology and products, followed byQ&A session with all the panelists. The vendors are asked to perform head to head live tests under the sameconditions. Some setup is allowed and is described during the test.
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss

A2b: PANEL: Indoor Location Policy and Standards UpdateDate: Wednesday, September 16, 2015Time: 3:55 AM - 5:30 AMRoom: Room 13/16
Chairs:Susan Sherwood, Verizon WirelessDr. Richard Fuller, OmniTrail Technologies
4:00. Christian Gates, VP Strategy & Development, NextNav, Christian Gates, VP Strategy & Development,NextNav
4:23. Dr. David De Lorenzo, Principal Research Engineer, Polaris Wireless, Dr. David De Lorenzo, PrincipalResearch Engineer, Polaris Wireless
4:46. Greg Turetzky, Strategic Business Development, Intel Corporation, Greg Turetzky, Strategic BusinessDevelopment, Intel Corporation
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss
B2: GNSS IntegrityDate: Wednesday, September 16, 2015Time: 1:45 AM - 5:30 AMRoom: Room 19
Chairs:Neil Gerein, NovAtel Inc., CanadaJohn Fleming, Raytheon
1:50. Progress on Working Group-C Activities on Advanced RAIM, J. Blanch, T. Walter, P. Enge, StanfordUniversity; J. Burns, K. Alexander, Federal Aviation Administration; J.P. Boyero, European Commission, Belgium; Y.Lee, MITRE/CAASD; B. Pervan, M. Joerger, S. Khanafseh, Illinois Institute of Technology; M. Rippl, GermanAerospace Center (DLR), Germany; V. Kropp, University FAF, Munich, Germany; C. Milner, C. Macabiau, ENAC,France; N. Suard CNES, France; G. Berz, EUROCONTROL, Belgium
2:12. GNSS and Odometry Fusion for High Integrity and High Availability Train Control Systems, A. Neri,Radiolabs, Italy; S. Sabina, Ansaldo STS S.p.A., Italy; U. Mascia, Radiolabs, Italy
2:35. Augmented and Validated Positioning for Flood Emergency Services Based on Mobile Sensing, A.Favenza, Istituto Superiore Mario Boella, Italy; C. Rossi, Microsoft Innovation Center Torino, Italy; C. Bielski, EoXplore,Italy; F. Dominici, Istituto Superiore Mario Boella, Italy
2:58. ARAIM Architectures and Availability Prediction Method Based on BDS and GPS, P. Zhao, J. Zhang and Z.Wang, Beihang University, China
4:00. Behavior of ARAIM Integrity and Continuity Risk with Increasing Numbers of GNSS Ranging Sources, Y.Zhai, M. Joerger and B. Pervan, Illinois Institute of Technology
4:23. Online ARAIM Architecture Development to Support a Single GNSS Constellation, S. Pullen, P. Enge,Stanford University; S. Shaw, C. Frey, J. Frye, M. Souder, and R. Jackson, Lockheed Martin
4:46. Autonomous Integrity Monitoring Proposal for Critical Rail Applications, P. Brocard, O. Julien, EcoleNationale de l'Aviation Civile, France; M. Mabilleau, Egis, France
5:08. URA/SISA Analysis for GPS-Galileo ARAIM Integrity Support Message, S. Perea Diaz, M. Meurer, M. Rippl,B. Belabbas, German Aerospace Center (DLR), Germany; M. Joerger, B. Pervan, Illinois Institute of Technology
Alternate Presentations:A Novel ARAIM Approach in Probability Domain for Combined GPS and Galileo, L. Li, L. Zhao, F. Yang, N. Li,College of Automation, Harbin Engineering University, China
1.
Advanced RAIM for Horizontal Civil Aviation Applications, M. Mabilleau, J. Vuillaume, Egis Avia, France; G.Berz, N. Solomina, EUROCONTROL, France; I. Nikiforov, Université de Technologie de Troyes, France; O.F.Bleeker, Rockwell Collins
2.
Performance Parameters Analysis of GNSS User Application Level (UAL) Integrity Monitoring, X-L. Su, X.Zhan, J. Tu, Y. Zhanh, Shanghai Jiao Tong University, China
3.
QR-UKF Fusion of Satellite Selection and RAIM for GNSS Performance Enhancement in Multi-Constellation, Fanchen Meng, Lin Tao, Xiaoying Gu, Shan Wang, Bocheng Zhu, Peking University, China
4.
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss
C2: Alternatives and Backups to GNSS for NavigationDate: Wednesday, September 16, 2015Time: 1:45 AM - 5:30 AMRoom: Room 20
Chairs:Dr. Michael Meurer, German Aerospace Center (DLR), GermanyDr. Sherman Lo, Stanford University
1:50. An Investigation on the Contributing Factors of Enhanced DME Ranging Errors, K. Li, W. Pelgrum, J.Lindsey, Ohio University
2:12. Super-resolution Analysis of the L-band Air-to-ground Radio Channel, N. Schneckenburger, D. Shutin, T.Jost, M. Schnell, U-C. Fiebig, German Aerospace Center (DLR), Germany
2:35. A Direct 2D Position Solution for an APNT-System, E. Nossek, German Aerospace Center (DLR), Germany;J. Dambeck, Technische Universität München, Germany; M. Meurer, German Aerospace Center (DLR) & RWTHAachen University, Germany
2:58. Modernized eLoran: The Case for Completely Changing Chains, Rates, and Phase Codes, P.F. Swaszek,University of Rhode Island; R.J. Hartnett, US Coast Guard Academy; K.C. Seals, US Coast Guard Academy
4:00. Navigation using High-Frequency Ground Beacons and Ionosphere Model Corrections, Y. Baumgartenand M.L. Psiaki, Cornell University
4:23. Decentralized Position and Attitude Estimation Using Angle-of-Arrival Measurements, J. Rife and G.Vukasin, Tufts University
4:46. Impact of the DME Interference on the LDACS1 Ranging Performance, T. Thiasiriphet, N. Schneckenburger,M. Schnell, German Aerospace Center (DLR), Germany
5:08. Using Radar Positions for Alternative Positioning Navigation & Timing (APNT), S. Lo, Y.H. Chen, A.Barrows, T. Reid, M. James, P. Enge, Stanford University
Alternate Presentations:Channels in Terrestrial Positioning Systems, A. Raghupathy and A. Sendonaris, NextNav LLC1.
Seamless Navigation with Resilient PNT, C. Hargreaves and P. Williams, General Lighthouse Authorities of theUK and Ireland/Research and Radio-navigation Directorate, UK
2.
Design and Flight Testing of Locata-Based Flight Reference System, J. Raquet, M. Smearcheck, D. Marietta,Air Force Institute of Technology; J. Kawecki, D. Ruff, S. Herrera, 746th Test Squadron, Holloman AFB
3.
The use of the Phase Difference Observation of 1090 MHz ADS-B Signals for Wide Area Multilateration, C-W. Liao and S-S. Jan, National Cheng Kung University, Taiwan
4.
Sensitivity Study of the Wide Area Multilateration Using Ranging Source of 1090 MHz ADS-B Signals, S-L.Jheng and S-S. Jan, National Cheng Kung University, Taiwan
5.
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss
D2: Navigation Using Environmental FeaturesDate: Wednesday, September 16, 2015Time: 1:45 AM - 5:30 AMRoom: Room 21
Chairs:Logan Scott, LS ConsultingDr. Gert Trommer, Karlsruhe Institute of Technology, Germany
1:50. A Georeferencing Approach to Real-time Virtual Aid to Navigation Verification, R.G. Wright, GMATEK, Inc.& World Maritime University Malmo, Sweden; M. Baldauf, World Maritime University, Malmö, Sweden and Institute ofInnovative Simulation and Maritime Systems, Germany
1:50. Visual-inertial Indoor Localization and Mapping with Structure Lines, D. Zou, L. Pei, P.L. Liu and W.X. Yu,Shanghai Jiao Tong University, China
1:50. Smartphone-based Indoor Navigation Using PDR and Magnetic Matching, Y. Li, University of Calgary,Canada and Wuhan University, China; X. Niu, P. Zhang, Wuhan University, China; N. El-Sheimy, University of Calgary,Canada
1:50. Stereo-inertial Odometry Using Nonlinear Optimization, J. Huai and D. Grejner-Brzezinska, The Ohio StateUniversity
1:50. Adaptive Estimation of Altitude Bias in Terrain Referenced Navigation, B.L. Copp and K. Subbarao,University of Texas at Arlington
1:50. Los Mapping Table (LosTable): An Efficient Algorithm for Los Satellites Determination in MultipathAreas, G. Fu and J-C. Liu, Texas A&M University
1:50. Navigation Using ULF/VLF Environmental Features, J. Raquet and A. Compton, Air Force Institute ofTechnology
1:50. Loosely-Coupled Stereo Vision-Aided 3D Reduced Inertial Sensor and GPS for Land VehicleLocalization, Y.B. Sarvrood, Y. Gao, University of Calgary, Canada
1:50. Tightly Coupled Stereo Vision Aided Inertial Navigation Using Continuously Tracked Features for LandVehicles, F. Liu, Y.B. Sarvrood and Y. Gao, University of Calgary, Canada
1:50. Road Navigation Using Multiple Dissimilar Environmental Features to Bridge GNSS Outages, D. Walter, P.Groves, University College London, UK; B. Mason, J. Harrison, J. Woodward, P. Wright, Terrafix Ltd, UK
1:50. Multipath Assisted Positioning for Pedestrians, C. Gentner, R. Pöhlmann, M. Ulmschneider, T. Jost, A.Dammann, German Aerospace Center (DLR), Germany
1:50. Dynamic Fingerprint Positioning Method of Satellite Navigation Signal Based on 3-Dimensional ModelingScene, L. Yang, D. He, P. Liu, Shanghai Jiao Tong University, China
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss
E2: Next Generation GNSS PositioningDate: Wednesday, September 16, 2015Time: 1:45 AM - 5:30 AMRoom: Room 24/25
Chairs:Dr. Changdon Kee, Seoul National University, South KoreaDr. Heidi Kuusniemi, Finish Geodetic Institute, Finland
1:50. Four Constellation Early PVT, B. Bonhoure, T. Chapuis, H. Secretan, F.X. Marmet, CNES, French SpaceAgency, France; D. Lapeyre, P. Noirat, THALES Services, France
1:50. Asynchronous Multilevel Search Strategy for Fast Acquisition of AltBOC Signals, B. Kim, S-H. Kong,KAIST, South Korea
1:50. A New Approach for GNSS Frequency Selection Considering Detection of Cycle Slip Insensitive Pairs ofIonospheric Combination for Dual-Frequency Receivers, J. Song, Seoul National University, C. Kee, SeoulNational University, South Korea
1:50. Signal Quality Measurements for Advanced GPS Payload Development, M. Crown, AFRL/RVE; J.Anderson, Canyon Consulting; J. Gevargiz, Aerospace Corporation; A. Mitleman, Consultant
1:50. Unbiased Closed-Form GPS Position Estimation, J.K. Knight, Exelis Inc.
1:50. Time-Sequential Advanced RAIM: Measurement Error Model, Estimator, and Detector Design, M. Joergerand B. Pervan, Illinois Institute of Technology
1:50. Precise Platform Positioning with Multi Antenna GNSS Board, I. Khazanov, D. Kozlov, G. Zyryanov, SpectraPrecision, Trimble, Russia
1:50. Application of a Fast Unscented Kalman Filtering Method to Satellite Position Estimation using aSpace-borne Multi-GNSS Receiver, S. Biswas, L. Qiao, M. Choudhury, A. Dempster, The University of New SouthWales, Australia
1:50. Single-frequency L5 PPP-RTK with GPS, IRNSS, QZSS and Galileo, N. Nadarajah, Curtin University,Australia; P.J.G. Teunissen, Curtin University, Australia & Delft University of Technology, The Netherlands; A.Khodabandeh, W. Li, Curtin University, Australia
1:50. Characterization of GNSS Frequency Diversity for Positioning With Combined Tracking in FadingEnvironments, R.K. Siddakatte, A. Broumandan, G. Lachapelle, University of Calgary, Canada
1:50. Multi-Constellation, Dual-Frequency SBAS, J. Ostolaza, V. Izquierdo, V.M. Esteban, J.G. Pericacho, D.Pérez, M.A. Cantera, J. Celada, M.A. Fernández, J. Barrios, J. Caro, GMV, Spain
1:50. magicGNSS’ RTCM-based Service, a Leap Forward Towards Multi-GNSS High Accuracy Real-TimeProcessing, G.T. González, J.D. Calle-Calle, A.J. García, D. Luque-Arriero, D. Rodríguez-Porcheron GMV, Spain
1:50. Different Positioning Strategies Using Multi-Frequency / Multi-Constellation GNSS Measurements, M.Stanisak, U. Haak, A. Schwithal, Technische Universität Braunschweig, Institute of Flight Guidance, Germany
1:50. Analysis and Comparison of a GPS and GPS/Beidou Performance, X. Tang, G.W. Roberts, L. Lau, H. deLigt, C. Hancock, University of Nottingham, China
1:50. A Composite Integrity Evaluation Method of Global Navigation Satellite Systems, X-L. Su, X. Zhan, J. Tu,Y. Zhang, Shanghai Jiao Tong University, China
1:50. Performance Analysis of Combined GPS, GLONASS and BeiDou RTK Based on Single DifferencedObservations between Receivers, Z. Nie, China University of Petroleum, China & University of Calgary, Canada; Y.Gao, University of Calgary, Canada; Z. Wang, China University of Petroleum, China; H. Yang, University of Calgary,Canada
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss
F2: GNSS Authentication and Anti-SpoofingDate: Wednesday, September 16, 2015Time: 1:45 AM - 5:30 AMRoom: Room 23
Chairs:Dr. John Raquet, Air Force Institute of TechnologyDr. Alex Stratton, Rockwell Collins
1:50. A Complex EKF Based Vertical Direction Angle Estimation for GPS Spoofing Detection, Chang Ho Kang,Sun Young Kim, and Chan Gook Park, Seoul National University, South Korea
1:50. Robust Spoofing Detection and Mitigation based on Direction of Arrival Estimation, A. Konovaltsev, M.Appel, M. Cuntz, M. Meurer, German Aerospace Center (DLR), Germany
1:50. GNSS Repeater Spoofing Detection with Single Antenna, Y. Wang, X. Chen, X. Fang, P. Liu, W. Yu,Shanghai Jiao Tong University, China
1:50. High-Fidelity Signal Deformation Analysis of Live Sky Galileo E1 Signals using a ChipShape SoftwareGNSS Receiver, S. Gunawardena, M. Carroll, J. Raquet, Air Force Institute of Technology; F. van Graas, OhioUniversity
1:50. The Optimal Energy Efficient Interference for the Range Capture of a Code Phase GNSS Receiver and itsMitigation Technique, T. Iwamoto, Mitsubishi Electric Corporation, Japan
1:50. Galileo Open Service Authentication: A Complete Service Design and Provision Analysis, I.Fernández-Hernández, L. Bogaardt, EC, Spain; V. Rijmen, KUL; G. Seco-Granados, UAB, Spain; P. Walker, CGI; J.Simón, GSA; G. Tobías, I. Rodríguez, GMV, Spain; M. Canale, O. Pozzobon, QASCOM, Italy
1:50. GNSS Spoof Detection by Networked Receivers in a Mobile, Time Varying, Uncertain Formation, P.F.Swaszek, University of Rhode Island; R.J. Hartnett, US Coast Guard Academy; K.C. Seals, US Coast Guard Academy
1:50. Using Average Chip Shape to Authenticate GNSS Transmissions, J. Macdonald, AFRL/RYWN; S.Gunawardena, Air Force Institute of Technology/ENG
1:50. GNSS Spoofing Attack Detection using Aircraft Controller Response to Deceptive Trajectory, C. Tanil, S.Khanafseh, B. Pervan, Illinois Institute of Technology
1:50. Timing Model Checker - A Computing Framework for GNSS Integrity Based on Orderings and Continuityof Pseudoranges, G. Fu and J-C. Liu, Texas A&M University
1:50. Hardware Validation of Single-Antenna, Backward-Compatible, GPS Spoof Detection, E. McMilin, Y-H.Chen, S. Lo, P. Enge, Stanford University
1:50. A Network-based GNSS Structural Interference Detection, Classification and Source Localization, A.Broumandan, A. Jafarnia-Jahromi, S. Daneshmand, G. Lachapelle, University of Calgary, Canada
1:50. Galileo Public Regulated Services (PRS) with Limited Key Distribution, M. Turner, A. Richardson, J.Haddon, AIRBUS Defence and Space, UK; E. Aguado, B. Wales, M. Dumville, NSL, UK; N. Davies, R. Bowden, P.Togneri, QinetiQ, UK
1:50. Multi-type Interference Suppression for GNSS Based on Despread-respread Method, L. Wang, R. Wu, Y.Zhang, W. Wang and D. Lu, Civil Aviation University of China
1:50. Power Inversion Algorithm with Negative Diagonal Loading for Joint Jamming and Spoofing Mitigation, L. Bao, Tianjin University & Civil Aviation University of China; R. Wu, W. Wang, Civil Aviation University of China
1:50. An Experimental Platform for Live-Testing of Dual-Frequency Civilian GNSS Authentication Schemes, J.T. Curran, M. Paonni, M. Bavaro & J. Fortuny, European Commission, JRC, Institute for the Protection and Securityof the Citizen, Italy
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss

G2: Advanced Technologies in High Precision GNSS Positioning 2Date: Wednesday, September 16, 2015Time: 1:45 AM - 5:30 AMRoom: Room 22
Chairs:Frank Boon, Septentrio Satellite Navigation, BelgiumDr. Sunil Bisnath, York University, Canada
1:50. Dual-polarisation GNSS Observations for Multipath Mitigation and Better High-precision Positioning, K.Palamartchouk, P.J. Clarke, S.J. Edwards, R. Tiwari, Newcastle University, UK
1:50. The Effect of Correlator and Front-End Design on GNSS Pseudorange Biases for Geodetic Receivers, A.Hauschild, O. Montenbruck, DLR, German Space Operations Center (GSOC), Germany
1:50. Examining the Interoperability of PPP-AR Products, G. Seepersad and S. Bisnath, York University, Canada
1:50. Performance Analysis of Precise Point Positioning with External Ionosphere Constraint, P. Zhou and J.Wang, University of New South Wales, Australia
1:50. Algebraic Issues of Precise Point Positioning with Ambiguity Resolution in GNSS, A.A. Povalyaev, JSCRussian Space Systems, Moscow Aviation Institute, and National Research University, Russia; A.N. Podkorytov,Moscow Aviation Institute, National Research University and JSC Russian Space Systems, Russia
1:50. New Approach for Integrity Bounds Computation Applied to Advanced Precise Positioning Applications, P. Navarro, M.D. Laínez, M.M. Romay, GMV, Spain
1:50. An Open-source PPP Client Implementation for the CNES PPP-WIZARD Demonstrator, D. Laurichesse,C.N.E.S., France
1:50. Fast and Reliable GNSS Attitude Estimation Using a Constrained Bayesian Ambiguity ResolutionTechnique (C-BART), J.G. Garcia, Universidad Nacional de La Plata (UNLP), Argentina; P. Axelrad, University ofColorado Boulder; P.A. Roncagliolo, C.H. Muravchik, UNLP, Argentina
1:50. Integrating GPS/GLONASS/BDS to Accelerate Convergence and Initialization Time of Precise PointPositioning, Z. Pan and H. Chai, Zhengzhou Institute of Surveying and Mapping, China
1:50. Precise Positioning and L2C Signal Reception for the Mass Market, F. Pisoni, D. Di Grazia, G. Avellone,STMicroelectronics SRL, Italy
1:50. The Solar Radiation Pressure Modeling of Beidou Satellites, X. Wang, Q. Zhao, Shanghai AstronomicalObservatory, CAS, China; R. Guo, Beijing Satellite Navigation Center, China; X. Hu, Shanghai AstronomicalObservatory, CAS, China
1:50. Partial Ambiguity Resolution and Validation for Precise Point Positioning, P. Collins, F. Lahaye, CanadaGeodetic Survey, Canada; S. Bisnath, York University, Canada
1:50. Study on the Impact of TGD on BDS Positioning, L. Yinhua, Z. Feng, H.J. Zhang, X. Li, National Time ServiceCenter, CAS, China
1:50. Advanced GNSS Algorithms and Services Based on Highly-stable On-board Clocks, G.T. González, I.Rodríguez Pérez, A.J. García, D. Barba Marti, M.M. Villar, GMV, Spain
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss

A3: Commercial MEMS: Sensors, Integration and ApplicationsDate: Thursday, September 17, 2015Time: 8:30 AM - 12:15 PMRoom: Room 13/16
Chairs:Dr. Alissa M. Fitzgerald, A.M. Fitzgerald & Associates, LLC (invited)Becky Oh, PNI Sensor Corporation (invited)
8:35. Lowering Power and Noise - The Continuing Evolution of MEMS Sensors , J. Chong, Kionix
8:57. On the Complementarity of Audio & Motion Sensing, A. Bernard, Knowles Corporation
9:20. MEMS Sensor Opportunities for Embedded Internet of Things, I. Chen, Freescale
9:43. Sensor Augmented Indoor Navigation and Positioning, M. Gemelli and K. Nicholson, Bosch Sensortec
10:40. Pedestrian Dead Reckoning (PDR): Mobile vs Wearables, C.W.K. Gritton, Hillcrest Labs
11:03. Portable Device Use Case Recognition Technique for Pedestrian Navigation, A. Ali, J. Georgy, H-W.Chang, and A. Al-Hamad, InvenSense, Canada
11:26. Finally, GPS Inside a Building Becomes a Reality, Rejoice Retailers, Wibe Wagemans, IndoorAtlas
11:48. A New Integration Method for MEMS Based GNSS/INS Multi-sensor Systems, J. Zhou, J. Traugott, TrimbleTerraSat, Germany; B. Scherzinger, Applanix, Canada; C. Miranda, A. Kipka, Trimble TerraSat, Germany
Alternate Presentations:MEMS Oscillators for Kinematic GNSS Receivers and Carrier-phase Positioning, B.M. Aumayer and M.G.Petovello, University of Calgary, Canada
1.
Experimental Validation of the D-optimal Redundant Configuration, L. Fu and Y. Zhang, Beihang University,China
2.
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss

B3: UAV NavigationDate: Thursday, September 17, 2015Time: 8:30 AM - 12:15 PMRoom: Room 19
Chairs:Joshua Hintze, IMSARMarius Niculescu, Cloud Cap Technology–ISR Systems
8:35. Modelling and Calibration of Time-Varying Magnetometer Biases in Small Unmanned Aerial Vehicles, A.Stewart, D. Gebre-Egziabher, University of Minnesota, Twin Cities Campus
8:57. A Navigation and Guidance System for Autonomous Flights of MAVs into Buildings, M. Popp, S. Prophet,G. Scholz, G.F. Trommer, Karlsruhe Institute of Technology, Germany
9:20. Autonomous Return of UAV by Integrating Optical Flow and Image Matching, D. Zou, L. Pei, P.L. Liu andW.X. Yu, Shanghai Jiao Tong University, China
9:43. Fusion of GNSS and Vision for a Robust Navigation Solution: Concept and Demonstration with COTSSensors on UAV, F. Hennart, B. Polle, E. Kervendal, A. Robin, N. Despré, G. Jonniaux, K. Kanani, Airbus Defenceand Space, France
10:40. Vision-Aided Measurement Level Integration of Multiple GPS Receivers for UAVs, A. Shetty and G.Xingxin Gao, University of Illinois Urbana-Champaign
11:03. Robust MAV State Estimation Using a M-Estimator Augmented Sensor Fusion Graph, D. Chen and G.Xingxin Gao, University of Illinois at Urbana-Champaign
11:26. Design and Test of Algorithms and Receiver Toward Hybrid Alternative Positioning Navigation andTiming (APNT) Using DME and UAT Signals, Y-H. Chen, S. Lo, Stanford University; D. Akos, University of Coloradoat Boulder; P. Enge, Stanford University
11:48. Sense and Avoid for Unmanned Aircraft Systems: Ensuring Integrity and Continuity for Worst-CaseIntruder Trajectories, M.B. Jamoom, M. Joerger, and B. Pervan, Illinois Institute of Technology
Alternate Presentations:Attitude and Heading Reference of UAVs with Adaptive SO (3) Complementary Filter Based on Fuzzy Logic, Z. Junyi, D. Xiaojing, L. Wenguang, Beijing Institute of Technology, China
1.
Doppler and Bandwidth Aiding for UAV Mounted GPS L1 and Galileo E1 Receivers, A. Pickup, T. Moore, C.Hill, J. Pinchin, The University of Nottingham, UK
2.
Geo-Pointing of On-Board Sensors for Static/Low/High Dynamic Platforms, S. Moafipoor, P.J. de Jonge, L.Bock, J.A. Fayman, Geodetics Inc.
3.
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss

C3: GNSS Augmentation Systems and Integrity 1Date: Thursday, September 17, 2015Time: 8:30 AM - 12:15 PMRoom: Room 20
Chairs:Eric Châtre, European Commission, BelgiumDr. Samer Khanafseh, Illinois Institute of Technology
8:35. GAST-D Flight Experiment Results with Disturbed and Quiet Ionospheric Conditions, S. Saito, T.Yoshihara, A. Kezuka, K. Hoshinoo, S. Fukushima, S. Saito, Electronic Navigation Research Institute, Japan; Y.Otsuka, Nagoya University, Japan
8:57. Preliminary Results from Ionospheric Threat Model Development to Support GBAS Operations in theBrazilian Region, S. Pullen, Stanford University; J. Lee and M. Yoon, KAIST, South Korea; J. Gillespie, FederalAviation Administration; N. Mather and R. Cole, Mirus Technology; J. Rodrigues de Souza, National Institute for SpaceResearch, Brazil; P. Doherty and R. Pradipta, Boston College
9:20. Concept for a Dual Frequency Dual Constellation GBAS, M. Felux, M.-S. Circiu, B. Belabbas, M. Meurer,German Aerospace Center, (DLR), Germany; M. Stanisak, TU Braunschweig, Germany; C. Milner, Y. Jiang, A.Guilbert, ENAC, France; A. Lipp, Eurocontrol, France
9:43. Possible VDB Formatting for Multi-Constellation / Multi-Frequency GBAS Services, M. Stanisak,Technische Universität Braunschweig, Institute of Flight Guidance, Germany; A. Lipp, Eurocontrol, France; T. Feuerle,Technische Universität Braunschweig, Institute of Flight Guidance, Germany
10:40. Non-Nominal Troposphere Reassessment for Meeting CAT II/III with MC/MF GBAS, A. Guilbert, ENAC,France
11:03. Overbounding False-Alarm Probability for a Chi-Square Monitor with Natural Biases, J. Rife, TuftsUniversity
11:26. Methodology for the Design of Integrity Barriers for a Space Based Augmentation System, F. Soualle, Q.Meindl, S. Carcanague, P. Blanc-Paques, Airbus Defence and Space GmbH, Germany
11:48. SBAS CAT-I Capability in Europe: The LPV-200 Service, C. Hernando, A. Marquez, P. Pintor, R. Roldán,J.M. Álvarez, J.M. Lorenzo, ESSP SAS, European Satellite Services Provider, Spain
Alternate Presentations:The Ionospheric Delay Correction Methods in SBAS of BeiDou, S. Wang, B. Zhu. Peking University, China1.
Integrity of GNSS Position Solution for Safety Related Applications, M. Jonas, University of Pardubice, CzechRepublic
2.
Research on Feasibility of Pseudolite Augmentation Network in a Side Configuration, D-P. Li, W. Liu, P-K.Deng, Y. Qu, L-C. Zeng, T. Liu, Academy of Opto-Electronics, CAS, China
3.
The Arctic Testbed – Experimentation Results on SBAS in the Arctic Region, P.E. Kvam, Kongsberg Seatex,Norway; M. Jeannot, European Space Agency, France
4.
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss
D3: PANEL: GNSS Security and RobustnessDate: Thursday, September 17, 2015Time: 8:30 AM - 12:15 PMRoom: Room 24/25
Chairs:Dr. John W. Betz, The MITRE CorporationSarah Mahmood, Science & Technology Directorate, Homeland Security
GNSS Security and Robustness (Panel Session, Presentations by invitation only) This panel session explores theavailability of technologies to enhance the security and robustness of satnav use, and the transition of thesetechnologies into operational use. Panel members will describe relevant technologies and their maturity; their transitioninto products; and processes, policies, strategies for fielding the resulting products. Views on standards andcertification will be explored.
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss
E3: GNSS Receiver Technologies and Processing for Constrained EnvironmentsDate: Thursday, September 17, 2015Time: 8:30 AM - 12:15 PMRoom: Room 22
Chairs:Dr. Thomas Pany, IFEN GmbH, GermanyManuel Toledo Lopez, GMV, Spain
8:35. Robust Unambiguous Tracking of High-Order BOC Signals: A Multi-Correlator Approach, J.A.Garcia-Molina, M. Navarro-Gallardo, G. Lopez-Risueño, M. Crisci, European Space Agency/ESTEC, The Netherlands
8:35. Characterization of GNSS Observables for High Precision Navigation with Integrity, M.J. Panikowski, E.Domínguez, GMV, Spain; E. Aguado, D. Lowe, NSL, UK; G. Seco-Granados, J. A. Lopez-Salcedo, D. Egea, UAB,Spain; D. Naberezhnykh, TRL, UK; F. Dovis, Politecnico di Torino, Italy; J.P. Boyero, I. Fernandez, EuropeanCommission, Belgium
8:35. Multi-Antenna Techniques for NLOS and Spoofing Detection Using Vehicular Real Signal Captures inUrban and Road Environments, E. Domínguez, J.M. López-Almansa, GMV, Spain; G. Seco-Granados, J.A.Lopez-Salcedo, D. Egea, UAB, Spain; E. Aguado, D. Lowe, NSL, UK; D. Naberezhnykh, TRL, UK; F. Dovis,Politecnico di Torino, Italy; J.P. Boyero, European Commission, Belgium
8:35. The Split Processing Based Multipath Mitigating Technique for TMBOC Signal, L. Xie, X. Cui, M. Lu,Tsinghua University, China
8:35. A Unique Approach to Strong Multipath Mitigation in Dense Urban Areas, N. Kubo, K. Ren, S. Taro, TokyoUniversity of Marine Science and Technology, Japan
8:35. Evaluation of Multiple Fault Exclusion Based on L1 Norm Minimization with multi-GNSS Measurementsin Urban Environments, L-T. Hsu, The University of Tokyo, Japan; H. Tokura, N. Kubo, Tokyo University of MarineScience and Technology, Japan; S. Kamijo, The University of Tokyo, Japan
8:35. An Analytical Method to Determine Squaring Loss and Weak Signal Post Correlation SNR for a BroadClass of GNSS Signals, C.N. Kurby, iPosi Inc.
8:35. Performance Comparison of Difference Correlator Tracking Architecture and Co-op TrackingArchitecture Under Receiver Clock Instability, A. Shafaati, T. Lin, and G. Lachapelle, University of Calgary, Canada
8:35. Performance Comparison of VDFLL Architectures for a Dual Constellation L1/E1 GNSS Receiver inChallenging Environments, E. Shytermeja, A. Garcia-Pena, O. Julien, ENAC, France
8:35. Detection and Correction of the Side Peak Tracking of BOC Signals, N. Jardak, W. Vigneau, M3 Systems,France; L. Ries, F-X. Marmet, CNES, France
8:35. Computing Meaningful Integrity Bounds of a Low-cost Kalman-filtered Navigation Solution in UrbanEnvironments, P. Navarro, M. Azaola, C. Moriana, J. Cosmen, GMV, Spain
8:35. Signal-level Integrity and Metrics Based on the Application of Quickest Detection Theory to MultipathDetection, D. Egea-Roca, G. Seco-Granados, J.A. López-Salcedo, Universitat Autònoma de Barcelona, Spain; E.Domíngez, GMV, Spain; E. Aguado, D. Lowe, NSL, UK; D. Naberzhnykh, TRL, UK; F. Dovis, Politecnico di Torino,Italy; J.P. Boyero, I. Fernandez, European Commission, Belgium
8:35. Benefits of Chip Scale Atomic Clocks in GNSS Applications, T. Krawinkel, Leibniz Universität Hannover,Germany; S. Schön, Leibniz Universität Hannover, Germany
8:35. Multipath Channel Characteristics and Multipath Life-time Model Research for Different GNSS OrbitSatellites, X. Fang, X. Chen, Y. Wang, M. Adeel, R. Ying, P. Liu, Shanghai Jiao Tong University, China
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss
F3: Remote Sensing; Space Applications; Timing and Scientific Applications 1Date: Thursday, September 17, 2015Time: 8:30 AM - 12:15 PMRoom: Room 23
Chairs:Dr. Attila Komjathy, NASA Jet Propulsion LaboratoryDr. Jade Morton, Colorado State University
8:35. Ionospheric and Plasmaspheric contribution to the Total Electron Content Inferred from Ground Dataand Radio-Occultation-Derived Electron Density, G. González-Casado, J. M. Juan, J. Sanz and A. Rovira-Garcia,gAGE/UPC, Spain
8:35. GNSS Signal Characterization and Monitoring Using High Gain Antennas, F. van Graas, C. Cohenour, OhioUniversity; E. Vinande, Air Force Research Laboratory; S. Gunawardena, Air Force Institute of Technology
8:35. Toward Continuous GPS Carrier-phase Time Transfer: Eliminating the Time Discontinuity at a GPS DataAnomaly, J. Yao and J. Levine, Time and Frequency Division and JILA, National Institute of Standards andTechnology & University of Colorado, Boulder
8:35. Operating a Network of Multi-Frequency Software-Defined Ionosphere Monitoring Receivers, J.T. Curran,M. Bavaro, A. Aragon-Angel, M. Paonni, Institute for the Protection and Security of the Citizen, Joint Research Centre,Italy; A. Morrison, SINTEF Norway; & J. Fortuny, Institute for the Protection and Security of the Citizen, Joint ResearchCentre, Italy
8:35. Study on Time and Frequency Transfer using BDS Single Different Carrier Phase Observations, R. Zhang,H. Liu, C. Qian, M. Zhang, GNSS Research Center, Wuhan University, China
8:35. The Effect of Ionosphere on the Neutral Atmospheric GNSS Radio Occultation Retrievals, X. Yue and W.S. Schreiner, University Corporation for Atmospheric Research
8:35. Spaced Receiver Array for Ionospheric Irregularity Drift Velocity Estimation Using Multi-band GNSSSignals, J. Wang, Y. Morton, Colorado State University
8:35. Multi-Receiver Position-Information-Aided Vector Tracking for Robust GPS Time Transfer to PMUs, Y. Ngand G.X. Gao, University of Illinois at Urbana-Champaign
8:35. GNSS Toolkit in the Context of the Evolution of Space Based Augmentation Systems: STELLA NGCSupporting ESSP Technical Roadmap, O. Desenfans, W. Vigneau, M. Pollina, M3 Systems, Belgium; M. Sihrener,J. Soubielle, O. Nouvel, ESSP
8:35. Towards the Implementation of a GNSS-based Tsunami Early Warning System Using IonosphericMeasurements, Y-M. Yang and A. Komjathy, NASA JPL, California Institute of Technology; R.B. Langley, Universityof New Brunswick, Canada; X. Meng, O. Verkhoglyadova, A.J. Mannucci, NASA JPL, California Institute of Technology
8:35. Wide Area Time Transfer Performance of Locata, E. Powers, A. Colina, B. Fonville, US Naval Observatory; P.Benshoof, J. LaMance, J. Amt, Locata Corporation
8:35. GNSS Carrier-Phase Network Time and Frequency Transfer Technique, V. Mitrikas, I. Skakun, CentralResearch Institute of Machine Building, Russia
8:35. Galileo PPP Time Transfer: First Experiment, C.A. Garcia, R.M. White, M.C. Santos and R.B. Langley,University of New Brunswick, Canada
8:35. Is the Long-term Variation of the Estimated GPS Differential Code Biases Associated with IonosphericVariability?, J. Zhong, J. Lei, University of Science and Technology of China, China; X. Yue, University Corporationfor Atmospheric Research, USA; X. Dou, University of Science and Technology of China, China
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss
G3: Atmospheric Effects 1Date: Thursday, September 17, 2015Time: 8:30 AM - 12:15 PMRoom: Room 18
Chairs:Dr. Sam Pullen, Stanford UniversityDr. Jiwon Seo, Yonsei University, South Korea
10:40. TEC Extraction with Different Schemes to Model DCB Under Various Ionosphere Conditions, Y. Xiang, Y.Gao, University of Calgary, Canada; X. Chen, Zhengzhou Institute of Surveying and Mapping, China; H. Yang,University of Calgary, Canada
10:40. Regional TEC Modelling Based on Combined GPS/BeiDou, H. Yang and Y. Gao, University of Calgary,Canada
10:40. PPP Application for Estimation of Tropospheric Zenith Path Delays with High Temporal Resolution, Z.Kang, B. Tapley, S. Bettadpur, The University of Texas at Austin
10:40. Toward a High-fidelity Climatological Model of Ionospheric Delay, A.C. Stern, E. Altshuler, SequoiaResearch Corporation; P.H. Doherty, C.E. Valladares, Boston College
10:40. Modelling and Assessing Ionospheric Higher Order Terms for GNSS Signals, A. Aragon-Angel, EuropeanCommission - Joint Research Center (JRC), Italy; M. Hernandez-Pajares, UPC-IONSAT, Spain; P. Defraigne and N.Bergeot, ROB, Spain; R. Prieto-Cerdeira, ESA, The Netherlands
10:40. Nonlinear Estimation to Assimilate GPS TEC Data into a Regional Ionosphere Model, M.L. Psiaki, CornellUniversity
10:40. Recent Space Weather Effects on WAAS and EGNOS, P. Doherty, Boston College; R. Prieto-Cerdeira,European Space Agency, The Netherlands; C. Carrano, Boston College; R. Orus-Perez, European Space Agency; S.Delay, Boston College
10:40. Precipitable Water Comparisons Over Ghana using PPP Techniques and Reanalysis Data, A.A.Acheampong, C. Fosu, L.K. Amekudzi, Kwame Nkrumah University of Science & Technology, Ghana; E. Kaas,University of Copenhagen, Denmark
10:40. The Results of Real Time Experimental Monitoring of Local Ionospheric Scintillations Using GNSSSignals, A. Kupriyanov, A. Maiorov, V. Nepoklonov, the Moscow State University of Geodesy and Cartography,Russia; E. Matskin, D. Rozhdestvenskiy, Join Stock Company “A.L. Mints Radio-Technology Institute”, Russia; R.Davlatov, National Research Institute for Physical-Technical and Radio Engineering Measurements, Russia
10:40. Monitoring the Ionosphere Using Integer-Leveled GLONASS Measurements, S. Banville, CanadianGeodetic Survey, Natural Resources Canada, Canada; R.B. Langley, University of New Brunswick, Canada
10:40. Modelling of the Ionosphere by Neural Network for Equatorial SBAS, T. Désert, T. Authié, S. Trilles,Thales Alenia Space, France
10:40. Maximum of the SBAS Ionosphere Corrections Error Using Spatio Temporal Bound EvaluationTechniques, M. Chassan, J-M. Azaïs, Université Paul Sabatier & CNES, France; G. Buscarlet, Thales Alenia Space,France; N. Suard, CNES, France; S. Trilles, Thales Alenia Space, France
10:40. Ionospheric Prediction Over Equatorial and Non-equatorial Regions Using GNSS Data, M. Cueto, A.Cezón, E. Sardón, GMV, Spain
10:40. Ionospheric Depletion Detection and Analysis Over Africa, M. Cueto, A. Cezón, E. Sardón, GMV, Spain
10:40. Mitigation of Ionospheric Effects on GNSS RTK at Low Latitudes, J. Park, S. Veettil, M. Aquino, L. Yang,C. Cesaroni, University of Nottingham, UK
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss

A4a: Multi-Constellation and Multi-Function Chipsets in Consumer ProductsDate: Thursday, September 17, 2015Time: 1:45 AM - 3:25 AMRoom: Room 13/16
Chairs:Steve Mole, BroadComSteve Malkos, Google
1:50. Optimal Search Strategies in a Multi-constellation Environment: Analysis and Test Results From a GNSSReceiver, B. Townsend, R. Zuo, E. Anyaegbu, Intel Mobile Communications (UK) Limited, UK
2:12. GGTO: Stability and Impact on Multi-constellation Positioning, C. Gioia and D. Borio, EuropeanCommission, Joint Research Centre (JRC), Italy
2:35. An Innovative Remote Testing System for GNSS Receiver Based on IF Sampled Signal Library of VariousScenarios, X. Zhu, X. Chen, R. Ying, S. Zhan, Y. Wang, X. Fang, F. Su, D. He, P. Liu, W. Yu, Shanghai Jiao TongUniversity, China
2:58. Chip-Level Fused Location Technologies, D. Chou, C-L. Lee , C-Y. Chong, C.T. Weng MediaTek Inc., Taiwan
Alternate Presentations:Exploiting Multi-constellation Mass-market GNSS Receiver Architecture for Novel Radio NavigationSchemes, M. Bavaro, European Commission, Joint Research Centre (JRC), Institute for the Protection andSecurity of the Citizen (IPSC), Italy; F.Pisoni, STMicroelectronics Italy; J. Fortuny-Guasch, European Commission,JRC/IPSC, Italy
1.
Turning Multi-constellation Orbit Prediction Algorithms into Open-source, K. Alanen, J. Käppi, O. Lehtinen,Microsoft Mobile, Finland
2.
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss

A4b: PANEL: Sensor Suites in Phones, Tablets, Wearables What’s Inside?Date: Thursday, September 17, 2015Time: 3:55 AM - 5:30 AMRoom: Room 13/16
Chairs:Dr. Richard Fuller, OmniTrail TechnologiesDr. Guttorm Opshaug, Qualcomm
Current and emerging applications of sensors suites. What is driving adoption? What are the key technology andarchitecture factors enabling or limiting adoption? What’s inside of what’s inside?
4:00. Dr. Alissa M. Fitzgerald, Founder and Managing Member of A.M. Fitzgerald & Associates, Dr. Alissa M.Fitzgerald, Founder and Managing Member, A.M. Fitzgerald & Associates
4:23. Becky Oh, CEO of PNI Corporation, Becky Oh, CEO of PNI Corporation
4:46. Charles Gritton, CTO of Hillcrest Labs, Charles Gritton, CTO of Hillcrest Labs
5:08. David Huntingford, Director of Product Management for Location, CSR Technology, David Huntingford,Director of Product Management for Location, CSR Technology
5. Dr. Vladimir Belov, Associate Technical Director, Broadcom, Dr. Vladimir Belov, Associate Technical Director,Broadcom
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss

B4: Aviation and Marine ApplicationsDate: Thursday, September 17, 2015Time: 1:45 AM - 5:30 AMRoom: Room 19
Chairs:Scott Burgett, Garmin International, Inc.Stig Erik Christiansen, Kongsberg Seatex AS, Norway
1:50. RTCA SC-159: 30 Years of Aviation GPS Standards, C. Hegarty, The MITRE Corporation; G. Ligler, PMEI; L.Chesto, Consultant; H. Moses, RTCA, Inc.; J. Wichgers, Rockwell Collins; A.J. Van Dierendonck, AJ Systems; S.Kalyanaraman, Rockwell Collins; L. Azoulai, Airbus, France; Y. Lee, The MITRE Corporation; S. Heppe, TelenergyInc.; K. Wesson, Zeta Associates
2:12. Evaluation of GPS L5, Galileo E1 and Galileo E5a Performance in Flight Trials for Multi Frequency MultiConstellation GBAS, M.-S. Circiu, M. Felux, B. Belabbas, German Aerospace Center (DLR), Germany; J. Lee, KoreaAdvanced Institute of Science and Technology, South Korea; S. Pullen, Stanford University
2:35. Patch Antenna Asymmetry Performance Considerations & Mitigation, C. Bartone and J. Schopis, OhioUniversity
2:58. GNSS Secured Signals for Critical Air Traffic Management Applications and Specific Airspace Users, P.Barret and D. Colin, EUROCONTROL, Belgium
4:00. Developing Resilient PNT for all Mariners, A. Grant, P. Williams, C. Hargreaves & N. Ward, The GeneralLighthouse Authorities of the UK & Ireland
4:23. A Broadcast Algorithm for Maritime Augmentation Service Under Multi-constellation GNSS, S.H. Park andK.Y. Seo, Korea Research Institute of Ships and Ocean Engineering, South Korea
4:46. Enhancing Situational Awareness in the Baltic Sea Maritime Domain, H. Kuusniemi, S. Thombre, S.Söderholm, L. Chen, R. Guinness, Finnish Geospatial Research Institute, National Land Survey of Finland
5:08. EDAS (EGNOS Data Access Service): Alternative Source of Differential GPS Corrections for MaritimeUsers, J. Vázquez, E. Lacarra, ESSP SAS, Spain; T. Horváth, Alberding GmbH, Germany; J. Morán, M. Sánchez,ESSP SAS, Spain
Alternate Presentations:A Novel Vision-aided GNSS/INS Integration Method Using Line Features for Aviation Approach andLanding, L. Fu, J. Zhang, R. Li, Beihang University, China
1.
ACCSEAS: An e-navigation Test-bed in the North Sea - Final Outcomes, M. Bransby, A. Williams, G. Shaw,General Lighthouse Authorities of the UK and Ireland
2.
Transitioning the United States National Airspace System’s (NAS) Legacy Network of Very High Frequency(VHF) Omni-Directional Radio Ranges (VOR) to a Minimum Operational Network (MON), E. Etienne, V. Hinton,L. Salcedo Federal Aviation Administration; R. Achanta, Tetra Tech
3.
Ship Monitoring and Location Estimation Based on Global Navigation Satellite Signal Reflectometry, W. Liu,Shanghai Maritime University, China; Y. Hu, Shanghai Ocean University, China; S. Wang, J. Peng, ShanghaiMaritime University, China
4.
Precise Point Positioning/Magnetic Compass Integrated Robust Wave Level Application for Long PeriodWave Detection in Buoy’s Wind-up, S.G. Park, S.H. Park, T.H. Fang, D.J. Cho, Korea Research Institute ofShips & Ocean, South Korea
5.
The EGNOS NOTAM Proposals Provision: Supporting New EGNOS Based Operations, J. Morán-Garcia,ESSP-SAS, Spain; M. Troller, Skyguide, Switzerland; J. Vázquez-Flórez, M.Á. Sánchez, ESSP-SAS, Spain
6.
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss
C4: Interference and Spectrum IssuesDate: Thursday, September 17, 2015Time: 1:45 AM - 5:30 AMRoom: Room 18
Chairs:Dr. Andrew Dempster, University of New South Wales, AustraliaThomas Kraus, University FAF Munich, Germany
1:50. Quantitative Assessment of the Impact of GNSS Threats on Governmental Applications and Receivers(QUASAR), M. Dumville, W. Roberts, NSL, UK; J. Hammond, M. Trosh, Association of Chief Police Officers (ACPO),UK; C. Dixon, S. Hill, Satellite Applications Catapult Centre, UK; P. Lindsay, UK Space Agency, UK
2:12. Compatibility Assessment Between Amateur Radio Services and Galileo in the E6 Band, J.A.Lopez-Salcedo, Universitat Autonoma de Barcelona (UAB), Spain & European Commission, JRC, Italy; M. Bavaro, M.Paonni, J. Fortuny-Guasch, European Commission, JRC, Italy; D. Hayes, European Commission, Belgium
2:35. GNSS RFI Detection: Finding the Needle in the Haystack, M. Scaramuzza, H. Wipf, M. Troller, Skyguide,Swiss Air Navigation Services Ltd., Switzerland; H. Leibundgut, Swiss Air-Rescue, Switzerland; S. Rämi, Swiss AirForce, Switzerland; R. Wittwer, Armasuisse, Switzerland
2:58. Detection, Characterization and Mitigation of GNSS Jammers Using Windowed HHT, N. Fadaei, A.Jafarnia-Jahromi, A. Broumandan, and G. Lachapelle, University of Calgary, Canada
4:00. A Dual-Frequency Interference Suppression Unit for E1/E5a Designed with National InstrumentsSoftware Defined Radios, T. Kraus, S. Sailer, B. Eissfeller, Universität der Bundeswehr München, Germany
4:23. Advanced Interference Detection and Mitigation in Septentrio’s High Precision Receivers, W. De Wilde,J-M. Sleewaegen, B. Bougard, J. Van Hees, Septentrio Satellite Navigation NV, Belgium
4:46. Antenna Characterization for UAV Based GPS Jammer Detection, A. Perkins, L. Dressel, E. McMilin, Y-H.Chen, S. Lo, P. Enge, Stanford University
5:08. Interference and Spoofer Localisation within the GNSS Environmental Monitoring System (GEMS) -Large Area Field Trial Results and Commercialisation Aspects, G. Hooper and R. Thompson, GPSat Systems PtyLtd, Australia
Alternate Presentations:Detecting and Locating GPS Jamming, J. Coffed, J. Rolli, C. Slutsky, Exelis1.
Study on Wideband and Pulse Interference Mitigation Techniques with RAW BD Data, T. Hu, L. Wang, and R.Wu, Civil Aviation University of China, China
2.
Simultaneous Null and Main Lobe Widening for Jamming Suppression in Attitude High-Dynamic GNSSReceiver, D. Lu, S. Li, R. Wu, Civil Aviation University of China
3.
The New Ranging Signal Design for GNSS Based Zadoff-Chu Seqeuence and OFDM Modulation, J. Lee, J-B.Kim, Chungnam National University, South Korea; K-J. Kim, K-W. Song, Agency for Defense Development, SouthKorea; J.M. Ahn, Chungnam National University, South Korea
4.
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss

D4: Urban and Indoor Positioning and NavigationDate: Thursday, September 17, 2015Time: 1:45 AM - 5:30 AMRoom: Room 21
Chairs:Dr. Ruizhi Chen, Texas A&M University-Corpus ChristiDr. Xiaoji Niu, Wuhan University, China
1:50. Multipath Assisted Positioning with Band-Limited Signals in an Urban Environment, M. Ulmschneider andC. Gentner, German Aerospace Center (DLR), Germany
1:50. Simultaneous Localization and Mapping of Emitting Radio Sources, C. Yang, A. Soloviev, Qunav; J. Qiu,Army Research Laboratory
1:50. An Adaptive Kalman Filter for a Range Measurement Based Indoor Positioning System: AlgorithmAdaptation and Performance Testing, S. Zhao, Y. Jiao, H. Mi, T. Ma, M. Lu, Tsinghua University, China
1:50. Integrity Protection of 3D LADAR Odometry, Z. Zhu, East Carolina University; M. Uijt de Haag, Ohio University
1:50. Wireless Positioning Approach Based on Stochastic Resonance, D. He, P. Liu, W. Yu, Shanghai Jiao TongUniversity, China
1:50. Indoor Localization Based on Floor Plans and Power Maps: Non-Line of Sight to Virtual Line of Sight, J.J.Khalifeh, University of California, Riverside; S.S. Saab, Lebanese American University, Lebanon; Z. (Zaher) M.Kassas, University of California, Riverside
1:50. Enhanced State Estimation for Wheeled Vehicles, P. Roysdon, UC Riverside; D. Kelley, SubCarrier SystemsGroup; J. Farrell, UC Riverside
1:50. An Integrated Probabilistic Approach for GNSS Signal Processing under Multipath, R. Streiter, ChemnitzUniversity of Technology, Germany
1:50. Improvement of UWB Non-line of Sight Positioning Using Environmental Restrictions, L.K. Bonenberg,University of Nottingham, UK; M. Skulich, AGH University of Science and Technology, Poland
1:50. Graph-based Efficient WiFi Fingerprint Training Using Un-supervised Learning, B. Zhao, L. Pei, C. Xu,Shanghai Jiao Tong University, China
1:50. LiDAR-aided Integrated INS/GPS Navigation System for Unmanned Ground Vehicles in Urban and IndoorEnvironments Using Hybrid Adaptive Scan Matching Algorithm, S. Liu, Harbin Engineering University, China;M.M. Atia, T.B. Karamat, A. Noureldin, S. Givigi, Royal Military College of Canada
1:50. DiPLoc: Direct Signal Domain Particle Filtering for Network Localization, S. Zhang, E. Staudinger, W.Wang, C. Gentner and A. Dammann, German Aerospace Center (DLR), Germany
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss

E4: PANEL: Positioning with Confidence in Urban AreasDate: Thursday, September 17, 2015Time: 1:45 AM - 5:30 AMRoom: Room 24/25
Chairs:Dr. Mathieu Joerger, Illinois Institute of TechnologyDr. Christophe Macabiau, ENAC, France
Many new terrestrial applications require a high level of trust in the estimated user location, for safety-of-life, liability oreconomic reasons. Recent advances in multi-sensor navigation can provide the required capability, even inchallenging environments such as urban areas where GNSS performance is degraded. This session will explore thestate of the art in navigation for automotive, railroad, and other emerging applications. The panel will discussapplication-specific requirements, integrated sensor solutions, and innovative algorithms and methods that arecurrently implemented to improve and monitor positioning performance in challenging environments such as urbanareas.
1:50. Kevin M. Betts, Position, Navigation, and Timing (PNT) Director, Leidos, Inc. (invited), Kevin M. Betts,Position, Navigation, and Timing (PNT) Director, Leidos, Inc. (invited)
2:12. Dr. Francesco Rispoli, VP Satellite Technology, Innovation Unit-Satellite projects, Ansaldo STS, Genova,Italy, Dr. Francesco Rispoli, VP Satellite Technology, Innovation Unit-Satellite projects, Ansaldo STS, Genova, Italy
2:35. Dr. Ales Filip, Faculty of Electrical Engineering, University of Pardubice, Pardubice, Czech Republic(invited), Dr. Ales Filip, Faculty of Electrical Engineering, University of Pardubice, Pardubice, Czech Republic (invited)
2:58. Prof. David Bevly, GPS and Vehicle Dynamics Laboratory, Department of Mechanical Engineering,Auburn University, Prof. David Bevly, GPS and Vehicle Dynamics Laboratory, Department of MechanicalEngineering, Auburn University
4:00. Walt Fehr, Office of the Assistant Secretary for Research and Technology, ITS Joint Program Office, USDepartment of Transportation, Washington, DC (Invited), Walt Fehr, Office of the Assistant Secretary for Researchand Technology, ITS Joint Program Office, US Department of Transportation, Washington, DC (Invited)
4:23. Dr. Martin Haueis, Head of Localization and Data Management, Daimler AG, Sindelfingen, Germany(Invited), Dr. Martin Haueis, Head of Localization and Data Management, Daimler AG, Sindelfingen, Germany (Invited)
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss
F4: GNSS Receiver TechnologiesDate: Thursday, September 17, 2015Time: 1:45 AM - 5:30 AMRoom: Room 23
Chairs:Dr. Mark Psiaki, Cornell UniversityDr. Jeff Dickman, Northrop Grumman
1:50. Antenna Modules of the GNSS user Equipment: Innovative Approaches, S. Boyko, A. Kukharenko, S.Kosiakin, A. Isaev, Y. Yaskin, Branch of United Rocket and Space Corporation Institute of Space Device Engineering,Moscow
1:50. Evaluation of GNSS Direct Position Estimation in Realistic Multipath Channels, P. Closas, C.Fernández-Prades, CTTC, Spain; A.J. Fernández, M Wis, G. Veccione, DEIMOS, Spain; F. Zanier, J.A. Garcia-Molina,M. Crisci, ESA/ESTEC, The Netherlands
1:50. Large Antennas for Satellite Signal Monitoring and Characterisation, M. Bavaro, J.T. Curran, J.Fortuny-Guasch, European Commission, Joint Research Centre (JRC), Institute for the Protection and Security of theCitizen (IPSC), Italy
1:50. Characterization of Airborne Antenna Group Delay Biases as a Function of Incidence Angle for AircraftPrecision Approach Operations, F. van Graas, A. Raghuvanshi, Ohio University
1:50. Joint Code and Carrier Correlation for GNSS Signals with Sharpened Peaks, C. Yang, Sigtem Technology,Inc.
1:50. Simultaneous BOC Subcarrier Ambiguity Fixing Using the LAMBDA Method, J. Wendel, F.M. Schubert,Airbus DS GmbH, Germany; A. Rügamer, Fraunhofer-Institut fuer Integrierte Schaltungen IIS, Germany
1:50. The Qualification Engine: Fast Transition from Acquisition to Tracking in Difficult GNSS Environments, E. Anyaegbu, B. Townsend, and R. Zuo, Intel Mobile Communication, Daventry UK
1:50. A Unified Tracking Structure for Both Single-band and Dual-band Processing of High-Order BOC Signal, Y. Zhu, X. Cui, M. Lu, Tsinghua University, China
1:50. GOOSE – GNSS Receiver with an Open Software Interface, M. Overbeck, F. Garzia, A. Popugaev, O. Kurz,F. Förster, S. Urquijo, W. Felber, Fraunhofer IIS, Germany; A.S. Ayaz, S-J. Ko, B. Eissfeller, UniBw Munich, Germany
1:50. The Design and Assessment of the Side-peak Tracking Detection Strategy for MBOC Signal TrackingBased on Bump-Jump, R. Hang, Z. Lei, L. Jian, Beijing Institute of Technology, China
1:50. Energy Frequency Discriminator for GNSS Carrier Tracking, Y. Zhang, Peking University, China; W. Lu,Beijing University of Posts and Telecommunication, China; D. Yu, Peking University, China
Alternate Presentations:A Half-cycle Ambiguity Resolution Method Designed for DBT Technique, Z. Li, X. Cui, M. Lu, Y. Zhu, TsinghuaUniversity, China
1.
Multi-Constellation Fast Acquisition Through Utilization of Orbit Predictions and Positioning Data, N.I.Ziedan, Zagazig University, Egypt
2.
A Fine Tuned Filter for Robust Positioning and Precise Timing of Space-borne GNSS Receivers, X. Chen,W.Y. Gao, M.L. Wang, Space Center, Tsinghua University, China
3.
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss
G4: GNSS Augmentation Systems and Integrity 2Date: Thursday, September 17, 2015Time: 1:45 AM - 5:30 AMRoom: Room 20
Chairs:Eric Châtre, European Commission, BelgiumDr. Samer Khanafseh, Illinois Institute of Technology
1:50. QZSS as a Platform for SBAS in the Arctic, T. Reid, T. Walter, P. Enge, Stanford University, USA; T. Sakai,Electronic Navigation Research Institute, Japan
2:12. SBAS Performance Analysis in Equatorial Regions, J. Ostolaza, A. Cezón, M. Cueto, V. Izquierdo, D. Pérez,E. Sardón, GMV, Spain
2:35. Modeling the Residual Error of the EGNOS Clock and Ephemeris Correction, Q. Tessier, C. Macabiau, C.Milner, A. Martineau, ENAC, France; L. Azoulai, Airbus Operations SAS, France; F. Amarillo-Fernandez, ESA, France
2:58. EGNOS High Integrity System Test Bed (HISTB): Transition to Dual Frequency and GalileoAugmentation, J-A. Gicquel, B. Charlot, D. Joly, D. Lekaim, Thales Alenia Space, Toulouse, France; M. Jeannot,ESA/CNES, France
4:00. SBAS L1/L5 Enhanced ICD for Aviation: Experimentation Results, J. Fidalgo, M. Odriozola, M. Cueto, A.Cezón, GMV, Spain; C. Rodriguez, D. Brocard, ESA/CNES, France; J.C. Denis, ESA; E. Chatre, EC, Belgium
4:23. Integrity Assessment of Inter System Bias for Multi Constellation SBAS, C. Boulanger, ESA/CNES, France;F. Mercier, N. Suard, CNES, France; J. Samson ESA
4:46. Performance of Multi-Constellation Multi-Frequency SBAS for Various User Configurations, T. Sakai, T.Aso, K. Hoshinoo, and K. Ito, Electronic Navigation Research Institute, Japan
5:08. Perspectives for the Inclusion of “Flying Clocks” in the System Time Generation of Satellite-BasedNavigation Systems, S. Francis, J. Vilzman, and R. Braun, Airbus Defence and Space GmbH, Germany
Alternate Presentations:Effects of Ionospheric Scintillation on WAAS, X. Pi and L. Sparks, JPL, California Institute of Technology; E.Altshuler and A.C. Stern, Sequoia Research Corporation
1.
New Integrity System Test Bed NISTB - A New SBAS Tool to Support the EGNOS V3 Development andPerformance, A. Schmitz-Peiffer, A. Breitenacher, K. Fielitz, Airbus DS GmbH, Germany; M. Marcote, A. Auz,Elecnor Deimos Space S.L.U., Spain; M. Jeannot, ESA/CNES EGNOS Project Office, France
2.
Robust EGNOS Availability Performances under Severe Ionospheric Conditions, S. Trilles, T. Authié, C.Renazé, O. Raoul, Thales Alenia Space, France
3.
Dual-frequency Multi-constellation SBAS Simulator, J. Doubek, Iguassu Software Systems, Czech Republic; S.Schlueter, ESA, EGNOS Project Office, France; C.A. Pandele, ESA, EGNOS Project Office, France/Institute ofSpace Science, Romania
4.
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss

A5: Applications Using Consumer GNSSDate: Friday, September 18, 2015Time: 8:30 AM - 12:15 PMRoom: Room 23
Chairs:Lionel Garin, QualcommDaniel Ammann, u-Blox AG, Switzerland
8:35. A Collaborative Interference Detection and Localization Algorithm for GPS-enabled Android Devices, E.Valles, C. Yu, A. Choy, R. Elsamar, The Aerospace Corporation
8:57. A Dual-antenna Spoofing Detection System Using GNSS Commercial Receivers, D. Borio and C. Gioia,European Commission, Joint Research Centre (JRC), Italy
9:20. An Expendable GNSS Sensor for the Continuous Monitoring and Risk Profiling of Land andInfrastructure, W. Roberts, M. Hutchinson, NSL, UK; G. Phipps, A. Keal, MONITEYE, UK
9:43. Wearable GNSS: Achieving the Lowest Power Consumption, S. Mole, Broadcom
10:40. The World’s first GPS MOOC and Worldwide Laboratory using Smartphones, F. van Diggelen, BroadcomCorporation and Stanford University; P. Enge, Stanford University
11:03. GHOST: Galileo EnHancement as BoOster of the Smart CiTies, A. Favenza, Istituto Superiore Mario Boella,Italy; C. Kavadias, Teletel, Italy; S. Tadic, Bitgear, Italy; V. Tsagaris, Irida Labs, Italy; J. Grosso, Alpha Consult, Italy; P.Knezevic, Arriva, Italy; M. Paoletti, Bus Company, Italy
11:26. Cooperative Detection of Multiple GNSS Satellite Signals in GNSS-Challenged Environments, M.Andrianarison, R. Landry, École de Technologie Supérieure, Montréal, Canada; M. Sahmoudi, ISAE – SUPAERO &TESA, University of Toulouse, France
11:48. Phone Based Mobile Monitoring and Central Navigating Method for Farm Operation, C. Wu, ChinaAgricultural University, China and Texas A&M University, USA; J. Wang, L. Zhou, J. Zhao, China AgriculturalUniversity, China; Y. Cai, University of Illinois at Urbana-Champaign
Alternate Presentations:GNSS Robot Car for the Competition using Satellite Report for Disaster and Crisis Management of QZSS, H.Irie and K. Hayama, National Institute of Technology, Kumamoto College, Japan
1.
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss

B5a: PANEL: Innovations in UAV Navigation for Civil Airspace OperationsDate: Friday, September 18, 2015Time: 8:30 AM - 10:05 AMRoom: Room 24/25
Chairs:Dr. Per Enge, Stanford UniversityDr. Maarten Uijt de Haag, Ohio University
This panel will cover some of the new and exciting applications planned for unmanned aircraft systems (UAS) toinclude octo-copters that hunt for GPS jammers. It will also cover the safety related issues of navigating UAS in ourairspace including detect and avoid. The panel will also address: the development of minimum operations performancestandards for UAS; operational hazards and liability for UAS operations; additional infrastructure needed to supportUAS navigation; the new draft UAS rules; commercial UAS platforms expected in the near future; and additionnalperformance and safety requirements needed when navigating UAS at low altitudes near populated areas.
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss
B5b: PANEL: Cloud and Crowd Sourced NavigationDate: Friday, September 18, 2015Time: 10:35 AM - 12:15 PMRoom: Room 24/25
Chair:Guylain Roy-MacHabée, RX Networks, Canada
This session covers the emergence, and implications, of cloud and crowd-sourced based techniques for positioningand navigation. Panelists, from location technology vendors, service providers and academia, will debate questionssuch as “Is the cloud navigation the future of navigation? How much accuracy improvement can we expect? What areimplications related to privacy? What are the benefits to the end user? Is crowd sourcing the ultimate solution for theurban and indoor navigation? What type of performance can we expect? What type of new possibilities it will open?”.Time will be for Q&A with the audience.
10:40. Wibe Wagemans, President, Indoor Atlas, Wibe Wagemans, President, Indoor Atlas
11:03. Carol Politi, CEO, TRX System, Carol Polity, CEO, TRX Systems
11:26. Dr. Robert Guiness, Research Scientist at Finnish Geospatial Research Institute National Land Surveyof Finland, Finland, Dr. Robert Guiness, Research Scientist at Finnish Geospatial Research Institute National LandSurvey of Finland, Finland
11:48. Chris Gates, Vice-President, Strategy & Development, NextNav (Invited), Chris Gates, Vice-President,Strategy & Development, NextNav (Invited)
5. Steve Coast, Head of OpenStreetMaps, Telenav (Invited), Steve Coast, Head of OpenStreetMaps, Telenav(Invited)
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss

C5: Modernization of GNSS - SignalsDate: Friday, September 18, 2015Time: 8:30 AM - 12:15 PMRoom: Room 20
Chairs:Dr. Stuart Riley, TrimbleDr. Christian Tiberius, Delft University of Technology, The Netherlands
8:35. Proposed Evolution of the C/A Signal, T.A. Stansell, Stansell Consulting; J.W. Betz, The MITRE Corporation;F. van Diggelen, Broadcom Corporation and Stanford University; S. Kogure, JAXA, Japan
8:57. VBOC1(alpha) and VBOC2(alpha,1-alpha)) Generalized Multidimensional Geolocation ModulationWaveforms--Technical Report, I.F. Progri, Giftet Inc.
9:20. Efficient IBOC - Extending the Modified Interplex for Next Generation Galileo Satellites while preservingfull Backward Compatibility, S. Corvo, V. Valle, F. Paggi, Thales Alenia Space, Italy; D. Guerrini, M. Luise., WISERsrl, Italy; M. Malik, S. Wallner, ESA, The Netherlands
9:43. A Single Acquisition Channel Receiver for GPS L1CA and L2C Signals Based on Orthogonal SignalProcessing, M. Al-Aboodi, I.A. Lami, A. Albu-rghaif, The University of Buckingham, UK; P. Van Torre, H. Rogier,INTEC, Ghent University, Belgium
10:40. Extended Time-division AltBOC Modulation Technique for GNSS, Z. Zhou, J. Wei, Z. Tang, T. Yan,Huazhong University of Science & Technology, China
11:03. An Acquisition Algorithm for ACE-BOC Signal Based on PMF-FFT and its Performance Analysis, Z. Liu,Y. Zhao, M. Lu, G. Li, National Digital Switching Center, China
11:26. LDPC Channel Code Optimization for a GNSS CSK-Modulated Signal, M. Roudier, CNES, France; C.Poulliat, ENSEEIHT, France; A. Garcia-Pena, ENAC, France; L. Ries, CNES, France; O. Julien, ENAC, France; T.Grelier, CNES, France; M.-L. Boucheret, ENSEEIHT, France; D. Kubrak, Thales Alenia Space, France
11:48. GNSS Nominal Signal Distortions - Estimation, Validation and Impact on Receiver Performance, S.Thoelert, M. Vergara, C. Enneking, M. Sgammini, F. Antreich, German Aerospace Center (DLR), Germany; M. Meurer,German Aerospace Center (DLR) & RWTH Aachen University, Germany; C. Rodriguez, D. Brocard, CNES, France
Alternate Presentations:PERMIT: Demonstrating Dual Mode Galileo PRS and GPS PPS P(Y) Secured Navigation Reception, N.Davies, A. Evans, E. Warner, QinetiQ, UK; D. Hagan, A. Joseph, Rockwell Collins, D. Mathews, Rockwell Collins,UK
1.
Results of GNSS Bias Calibration Using Observations from LEO Satellites, P. D'Angelo, DEIMOS Space,Spain; P. Silva, P. Vieira, DEIMOS Engenharia, Portugal; F. Amarillo, ESA/ESTEC. TEC-ETN, The Netherlands
2.
Message Optimization Over L2C and L5, C. Bowen, Booz Allen Hamilton Engineering Services, LLC3.
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss

D5: Enhancing GNSS with Sensors, Mapping and CooperationDate: Friday, September 18, 2015Time: 8:30 AM - 12:15 PMRoom: Room 21
Chairs:Dr. Andrey Soloviev, QuNavDr. David Bétaille, IFSTTAR, France
8:35. Robust GNSS Navigation in Urban Environments by Bounding NLOS bias of GNSS Pseudoranges Usinga 3D City Model, M. Sahmoudi, N. Kbayer, and E. Chaumette, ISAE-SUPAERO /TESA, Université de Toulouse,France
8:35. A New Approach of Tight Integrating of GNSS Receiver and Single-Odometer Measurements for LandVehicles Positioning, M. Sahmoudi, ISAE-SUPAERO, University of Toulouse, France
8:35. NLOS Exclusion using Consistency Check and City Building Model in Deep Urban Canyons, L-T. Hsu, Y.Gu and S. Kamijo, The University of Tokyo, Japan
8:35. A Collaborative Direct P(Y) Acquisition Scheme for GPS Receiver Networks, C.N. Collins and D.M. Bevly,Auburn University
8:35. A Modular Solution for Safely Refining Navigation Filters with Minimal Map Information, R. Cofield, S.Martin, and D. Bevly, Auburn University
8:35. Seamless Handover of GNSS Signal Tracking in a Multi-Receiver Setup, O. Osechas, DLR, Germany; K.J.Kim, K. Parsons, MERL
8:35. Collaborative Mapping of Terrestrial Signals of Opportunity, J. Morales and Z. (Zaher) Kassas, University ofCalifornia, Riverside
8:35. Quasi-Tightly-Coupled GNSS-INS Integration with a GNSS Kalman Filter, B. Scherzinger, ApplanixCorporation, Canada
8:35. GNSS Shadow Matching: The Challenges Ahead, P. Groves, M. Adjrad, C. Ellul, L. Wang, University CollegeLondon, UK
8:35. Enhancing Conventional GNSS Positioning with 3D Mapping without Accurate Prior Knowledge, M.Adjrad and P.D. Groves, University College London, UK
8:35. UWB for Navigation in GNSS Compromised Environments, K. Dierenbach, S. Ostrowski, Z. Koppanyi,G. Jozkow, C. Toth, D. Grejner-Brzezinska, The Ohio State University
8:35. Distributed GNSS Collaborative Localization: Theoretical Performance Analysis, Simulation and OutfieldTest Verification, B. Huang, Z. Yao, X. Cui, M. Lu, Tsinghua University, China
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss

E5: GNSS Receiver Signal Processing for Degraded Signal ConditionsDate: Friday, September 18, 2015Time: 8:30 AM - 12:15 PMRoom: Room 22
Chairs:Thomas Stansell, Stansell ConsultingDr. James Curran, JRC, European Commission, Italy
8:35. Improvement of a High-Grade GNSS Receiver Robustness Against Ionospheric Scintillations Using aKalman Filter Tracking Scheme, Analysis and Results, A. Ferrario, A. Zin, L. Siniscalco, Thales Alenia Space Italy;P. Crosta, ESA-ESTEC, The Nederlands
8:35. Parallel Double Window Based Acquisition Method for Dual-polarisation GNSS Signal in MultipathEnvironment, R. Tiwari, A. Ahmad, S. Dlay, H. J. Strangeways and K. Palamartchouk, Newcastle University, UK
8:35. Fast and Precise GNSS Antenna Array Calibration, M. Zaeri-Amirani, S. Daneshmand, G. Lachapelle,University of Calgary, Canada
8:35. Enhanced GPS Complementary Channel Using Dual-polarization Antenna, J. Ding, Harbin EngineeringUniversity, China; P.D. Groves, M. Adjrad, University College London, UK
8:35. Modeling GPS Signal LOSS using Terrestrial Photogrammetric Methods, W.C. Wright and B.E. Wilkinson,University of Florida
8:35. A Dual Frequency False Lock Detection Approach, M. Navarro-Gallardo, European Space Agency/ESTEC,The Netherlands & Universitat Autònoma de Barcelona, Spain; J.A. Garcia-Molina, G. López-Risueño, EuropeanSpace Agency/ESTEC, The Netherlands; G. Seco-Granados, Universitat Autònoma de Barcelona, Spain; M. Crisci,European Space Agency/ESTEC, The Netherlands
8:35. Adaptive Tracking Techniques in Non-Stationary Environments, A. Pousinho, M. Toledo, T. Ferreira, GMV,Spain; J.A. Lopez-Salcedo, G. Seco, UAB, Spain; M.A Ribot Sanfélix, A. Jovanovic, C. Botteron, P.-A. Farine, EPFL;R. Ioannides, ESA
8:35. Characterizing Signal Distortion Due to Space-time Processing of Interference Impacted GNSS Signals, T. Marathe, S. Daneshmand, G. Lachapelle, University of Calgary, Canada
8:35. Signal-level Integrity and Metrics Based on the Application of Quickest Detection Theory to InterferenceDetection, D. Egea-Roca, G. Seco-Granados, J.A. López-Salcedo, Universitat Autònoma de Barcelona, Spain; E.Domíngez, GMV, Spain; E. Aguado, D. Lowe, NSL, UK; D. Naberzhnykh, TRL, UK; F. Dovis, Politecnico di Torino,Italy; J. Pablo Boyero, European Commission, Belgium
8:35. High-Rate GPS Velocity and Acceleration Determination in Highly Dynamic Flights, C. Bischof and S.Schön, Leibniz Universität Hannover, Germany
8:35. MF/MC Receiver Performance Evaluation Under Nominal Interference Conditions for Definition ofReceiver Parameter Space, A. Hornbostel and A. Konovaltsev, German Aerospace Center (DLR), Germany; P-Y.Dumas, Thales Avionics, France
8:35. A High-dynamic Null Widening GNSS Anti-jamming Algorithm Based on Reduced-rank Space-TimeAdaptive Processing, R. Wu, L. Ge, D. Lu, L. Wang, W. Wang, Civil Aviation University of China
8:35. Signal Quality Monitoring for Discrimination Between Spoofing and Environmental Effects InducingCorrelation Distortions, E. Garbin Manfredini, Politecnico di Torino, Italy; B. Motella, Istituto Superiore Mario Boella,Italy; F. Dovis, Politecnico di Torino, Italy
8:35. Multipath Distance Detector Algorithm (MPDD), M. Berardo and L. Lo Presti, Politecnico di Torino, Italy
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss
F5: Atmospheric Effects 2Date: Friday, September 18, 2015Time: 8:30 AM - 12:15 PMRoom: Room 18
Chairs:Dr. Jiyun Lee, KAIST, South KoreaDr. Susan Skone, University of Calgary, Canada
8:35. An Ionosphere Broadcast Model for Next Generation GNSS, M.M. Hoque, N. Jakowski and J. Berdermann,German Aerospace Center (DLR), Germany
8:35. Characterizing Ionospheric Scintillation for Future GNSS Radio Occultation Missions, M. Najmafshar, S.Skone and F. Ghafoori, University of Calgary, Canada
8:35. Assessment of Ionospheric Models for GNSS During a Year of Solar Maximum, A. Rovira-Garcia, J.M. Juan, J. Sanz, G. González-Casado, D. Ibáñez, Technical University of Catalonia, gAGE/UPC, Spain
8:35. Analysis of Multipath Effect on the Determination of BeiDou Inter-frequency bias, Bao Shu, Hui Liu,Longwei Xu, Wuhan University, China; Dan Wu, Chang’an University, China
8:35. Auroral Monitoring Index Using a Network of GNSS Receivers, R. Tiwari, H. J. Strangeways and S. Dlay,Newcastle University, UK
8:35. High Accuracy Tropospheric Delay Determination Based on Improved Modelling and High ResolutionNumerical Weather Model, J. Dousa, PECNY, The Netherlands; A. Martellucci, R. Orus Perez, The Netherlands; H.Veerman, S. Storm van Leeuwen, H. Zelle, A. van Kleef, NLR, The Netherlands; S. de Haan, KNMI, The Netherlands
8:35. An Ionosphere TEC Monitoring Method Based on Real-time Multipath Error Estimation, W. Zhao, J-X.Zhao, L. Min, Beijing Satellite Navigation Center, China
8:35. GNSS Multi-Frequency Carrier Phase Characterization During Strong Equatorial IonosphericScintillation, D. Xu, Y. Morton, Colorado State University; D. Akos, University of Colorado, Boulder; T. Walter,Stanford University
8:35. A Next Generation Broadcast Model (BDSSH) and Its Implementation Scheme of Ionospheric Time DelayCorrection for BDS/GNSS, Y. Yuan, Institute of Geodesy and Geophysics, CAS, China; Z. Li, Academy ofOpto-Electronics, CAS, China; X. Huo, N. Wang, Institute of Geodesy and Geophysics, CAS, China
8:35. Comparative Study of GPS Signal Intensity Fading Characteristics at Low Latitudes, Y. Jiao, Y. Morton, S.Taylor, Colorado State University; D. Akos, University of Colorado at Boulder; T. Walter, Stanford University
8:35. Field Test Results from a Smartphone App for GNSS Ionospheric Data Collection, A. Kennedy, R.Kingsbury, Massachusetts Institute of Technology; A. Coster, V. Pankratius, P. Erickson, MIT Haystack Observatory;P. Fagundes, Universidade do Vale do Paraiba, Brazil; E. Rodrigues de Paula, National Institute For Space Research,Brazil; K. Cahoy, Massachusetts Institute of Technology
8:35. Assessing Ionospheric Threats for Aviation Systems in South America, R. Pradipta, P.H. Doherty, C.Valladares, Boston College; E. de Paula, INPE, Brazil
8:35. A Statistical Study of Horizontal Drifts and Ionospheric Diffraction Anisotropy in the Auroral Zone, Y. Su,S. Datta-Barua, Illinois Institute of Technology; G.S. Bust, Johns Hopkins University/APL; K. Deshpande, VirginiaPolytechnic Institute and State University; S. Kaeppler, SRI International; D. Hampton, University of Alaska Fairbanks;G. Crowley, Atmospheric and Space Technology, Research Associates
8:35. Development of Multi-Frequency Adaptive Kalman Filter Based Tracking Loop for IonosphereScintillation Monitoring Receiver, A. Ashwitha, T. Lin, G. Lachapelle, University of Calgary, Canada
8:35. Characterisation of Impact of Scintillations over EGNOS, R. Chaggara, O. Nouvel, J. Soubielle, A.Billot,European Satellite Services Provider, France
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss
A6a: PANEL: PNT Privacy IssuesDate: Friday, September 18, 2015Time: 1:45 AM - 3:20 AMRoom: Room 24/25
Chairs:Dr. Christoph Günther, German Aerospace Center (DLR)/TU München, GermanyDr. Todd Humphreys, The University of Texas at Austin
1:50. Mr. Logan Scott, LS Consulting, Mr. Logan Scott, LS Consulting
2:12. Mr. Oscar Pozzobon, Qascom, Italy, Mr. Oscar Pozzobon, Qascom, Italy
2:35. Mr. Simon Hania, TomTom, The Netherlands, Mr. Simon Hania, TomTom, The Netherlands
2:58. Mr. Marco Balduzzi, Trendmicro (Invited), Mr. Marco Balduzzi, Trendmicro (Invited)
3:20. Mr. Jashan Bhatti, University of Texas at Austin, Mr. Jashan Bhatti, University of Texas at Austin
3:42. Prof. Frans Von der Dunk, Nebraska College of Law, Prof. Frans Von der Dunk, Nebraska College of Law
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss
A6b: PANEL: Receiver Performance StandardsDate: Friday, September 18, 2015Time: 3:20 AM - 4:55 AMRoom: Room 24/25
Chairs:Dr. Sai Kalyanaraman, Rockwell CollinsKaren Van Dyke, DOT Volpe Center
The competition for RF spectrum raises the importance of compatibility of services in adjacent or near-by frequencybands. GNSS receivers for aviation applications have specific requirements for tolerance of in-band emissions as wellas susceptibility to out-of-band signals. However, other GNSS receiver types have typically not been subjected to suchstandards. New, higher-power services in the L-band may require improved out-of-band rejection in GNSS receiversand there have been discussions on imposing GNSS receiver performance standards in addition to establishment of"harm claim thresholds" which would influence receiver performance specifications. The U.S. Department ofTransportation has launched a GPS Adjacent Band Compatibility Assessment to identify processes for derivingadjacent band power limits for current and future GNSS signals. The panel will provide an update on these ongoingdevelopments, along with perspectives on the topic and stimulate a lively discussion about the pros and cons of theissue at hand and the approaches espoused to determine spectral compatibility in the bands adjacent to GNSS.
3:20. Mr. Ken Alexander, Federal Aviation Administration, Mr. Ken Alexander, Federal Aviation Administration
3:42. Mr. Scott Burgett, Garmin International, Mr. Scott Burgett, Garmin International
4:04. Dr. Frank van Diggelen, Broadcom Corporation, Dr. Frank van Diggelen, Broadcom Corporation
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss
B6: Precise Point Positioning and L-band ServicesDate: Friday, September 18, 2015Time: 1:45 AM - 4:55 AMRoom: Room 18
Chairs:Sara Masterson, NovAtel Inc., CanadaDr. Christian Rocken, GPS Solutions
1:50. The New G4 Service: Multi-constellation Precise Point Positioning Including GPS, GLONASS, Galileo andBeiDou, J. Tegedor, Fugro Satellite Positioning AS, Norway; D. Lapucha, Fugro Chance, USA; O. Ørpen, E. Vigen, T.Melgard, R. Strandli, Fugro Satellite Positioning AS, Norway
2:12. Real-Time Single-Frequency Precise Point Positioning on the Road, P.F. de Bakker and C.C.J.M. Tiberius,Delft University of Technology, The Netherlands
2:35. Modeling and Prediction of Regional Ionospheric VTEC for Japanese Region by Spherical Cap HarmonicAnalysis, M. Ohashi, Y. Sato, A. Yamada, Y. Kubo and S. Sugimoto, Ritsumeikan University, Japan
2:58. NovAtel CORRECT with Precise Point Positioning (PPP) for High Accuracy Kinematic Applications, A.Jokinen, C. Ellum, I. Webster, S. Masterson and T. Morley, NovAtel Inc., Canada
3:20. Optimal Selection Algorighm of Positioning Satellites for Augmentation in Service with LimitedBandwidth, Y. Sato, M. Miya, S. Fujita, and J. Takiguchi, Mitsubishi Electric Corporation, Japan
3:42. RTK-PPP: Social Requirement and National Solution, K. Asari, Satellite Positioning Research and ApplicationCenter (SPAC), Japan; M. Saito, Mitsubishi Space Software Co. Ltd., Japan; R. Yasumitsu, J. Takiguchi, MitsubishiElectric Corporation, Japan
4:04. Improvements of Position Convergence and Availability with an Augmented Trimble CenterPoint RTXService, M. Brandl, X. Chen, R. Drescher, V. Gomez, H. Landau, A. Nardo, S. Seeger, Trimble TerraSat, Germany
4:26. A Precise Point Positioning GPS Augmentation Over GEO Satellites, B. Charlot and H. Al Bitar, ThalesAlenia Space, France
Alternate Presentations:GNSS Distributed Autonomous Orbit Determination Method Based on Inter-Satellite Links, D. Wang, J.Zhao, and C. Hu. Beijing Satellite Navigation Center, China
1.
Implementation and Performance Analysis of an Adaptive Vector Tracking Loop Utilizing Precise SatelliteOrbit/Clock and Ionospheric Products, S. Chen and Y. Gao University of Calgary, Canada
2.
Further Developments of VPPP Algorithms with Multiple Antennas, Y. Karatsu, A. Mouri, Y. Kubo and S.Sugimoto, Ritsumeikan University, Japan
3.
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss
C6: Modernization of GNSS - SystemsDate: Friday, September 18, 2015Time: 1:45 AM - 4:55 AMRoom: Room 20
Chairs:Dr. Stuart Riley, TrimbleDr. Christian Tiberius, Delft University of Technology, The Netherlands
Modernization of GNSS - systems
1:50. GPS Space Segment Science & Technology Investment at the Air Force Research Laboratory, D. CowellSenft, AFRL Space Vehicles Directorate
2:12. Development of the Metrological Maintenance of the GLONASS System Ground Segment, O. Denisenko, I.Silvestrov, V. Fedotov, A. Frolov, D. Pecheritsa. FSUE VNIIFTRI, Russia
2:35. Galileo As Measured Performance after 2015 Ground Segment Upgrade, D. Blonski, J. Hahn, S. Binda, R.Lucas, M. Hollreiser, ESA/ESTEC, The Netherlands; M. Kirchner, M. Goetzelmann, J. Kueger, Airbus D&S; M.Eleuteri, Thales Alenia Space Italia; G. Galuzzo, Telespazio Vega, UK
2:58. GPS Modernized Nav Message Differential Corrections (AKA “WAGE-2”), W. Feess, K. O'Neil, K. Kovach,The Aerospace Corporation
3:20. Japanese QZSS Centimeter Level Augmentation Service (CLAS), System Design for a RTK-PPP Service, M. Miya, Y. Sato, S. Fujita, K. Kaneko, Y. Shima, H. Sone, J. Takiguchi, M. Saito, Mitsubishi Electric Corporation,Japan
3:42. Comprehensive Comparison between Global Positioning System and BeiDou Navigation SatelliteSystem in Terms of Satellite Data, Signals, and Measurements, A-L. Tao, National Cheng Kung University, SouthKorea
4:04. Early PVT in Urban Environment with Operational and New Constellations, B. Bonhoure, T. Chapuis, T.Junique, F.X. Marmet, S. Rougerie, F. Lacoste, CNES, French Space Agency, France; D. Lapeyre, P. Noirat, ThalesServices, France
4:26. International Committee on Global Navigation Satellite Systems (ICG): 10 Years of Achievement, S.Gadimova, United Nations Office for Outer Space Affairs, Austria
Alternate Presentations:Galileo Ephemeris Consolidation and Control Analysis, M. Mabilleau, J. Vuillaume, Egis Avia, France; B.Bonhoure, N. Suard, CNES, France; C. Dulery, D. Lapeyre, C. Sauce, Thalès Service, France
1.
Recovery of Galileo L3 Satellites for In-Orbit Testing and Service Provision, D. Blonski, D. Navarro Reyes, G.Lopez-Risueno, S. Binda, M. Hollreiser, J. Hahn, M. Crisci, R. Lumb, D. Sanchez-Cabezudo, K. Eckstein, T.Leroux, P. Giordano, ESA/ESTEC, The Netherlands
2.
Initial Assessment of the Galileo Constellation with two SVs in Elongated Orbits, X. Zhang, X. Zhan,Shanghai Jiao Tong University, China; S. Feng, W.Y. Ochieng, Imperial College London, UK
3.
Authentication and High-Accuracy Performance Tests with the Galileo Commercial Service Demonstrator, I.Rodríguez-Pérez, G.T. González, J.D. Calle Calle, E. Carbonell Pons, GMV, Spain; M. Canale, O. Pozzobon,QASCOM, Italy; I. Fernández Hernández, European Commission, Belgium
4.
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss

D6: Multisensor Navigation in Wearables and Sport ApplicationsDate: Friday, September 18, 2015Time: 1:45 AM - 4:55 AMRoom: Room 21
Chairs:Dr. Paul Groves, University College London, UKAbdelrahman Ali, InvenSense, Canada
1:50. A Robust Context-based Heading Estimation Algorithm for Pedestrian Using a Smartphone, L. Wang, L.Pei, P.L. Liu, Shanghai Jiao Tong University, China
1:50. Heading Determination Without Constraints of a Fixed Smartphone Pose, Q. Zeng, Nanjing University ofAeronautics and Astronautics, China/Texas A&M University Corpus Christi, USA/Jiangsu Key Laboratory of Internet ofThings and Control Technologies, China; R. Chen, T. Chu, Texas A&M University Corpus Christi, USA; J. Liu, NanjingUniversity of Aeronautics and Astronautics, China/ Texas A&M University Corpus Christi, USA
1:50. Contextual Thinking for Inference and Prediction of Daily Activities by Mining Smartphone Data, T. Chu,R. Chen, Texas A&M University Corpus Christi; K. Liu, Texas A&M University Corpus Christi and China University ofMining and Technology, China; X. Li, Texas A&M University Corpus Christi; J. Liu, and Y. Chen, Finnish GeospatialResearch Institute, Finland
1:50. MyGeoTrust: A Platform for Trusted Crowdsourced Geospatial Data – Location Everywhere and Safe, R.Guinness, H. Kuusniemi, J. Vallet, T. Sarjakoski, J. Oksanen, FGI NLS, Finland
1:50. GNSS Photo Matching: Positioning using GNSS and Camera in Urban Canyon, T. Suzuki and N. Kubo,Tokyo University of Marine Science and Technology, Japan
1:50. The Development of Constraint Algorithms and Online Smoothing for Indoor and Pedestrian NavigationApplications with Smartphones, J-K. Liao, G-J. Tsai, Z-M. Zhou, National Cheng Kung University, Taiwan
1:50. Development of a diagnostic tool for cognitive impairment using a smart navigation device, S-H. Tsao,S-S. Jan, M-C. Pai, National Cheng Kung University, Taiwan
1:50. A Low-cost GNSS/IMU/Visual monoSLAM/WSS Integration Based on Federated Kalman Filtering forNavigation in Urban Environments, A.B. Afia, A-C. Escher, C. Macabiau, ENAC, France
1:50. On software Architecture Concepts for a Unified, Generic and Extensible Trajectory DeterminationSystem, M.E. Parés and I. Colomina, CTTC, Spain
1:50. A Multi-information Fusion Positioning Method Based on GPS/BDS/visual/WLAN/barometric, Q. Lai, Y.Xu, Z. He, X. Gong, AOE Academy of OPTO-Electronics, CAS, China
1:50. Modeling Seamless Positioning Algorithm Based GNSS Integrated with LTE Network, J. Xu, H. Wu, X. Lu,D. Zu, J. Wang, Anhui Huadong Polytechnic Institute, China
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss
E6: Advances in Software ReceiversDate: Friday, September 18, 2015Time: 1:45 AM - 4:55 AMRoom: Room 22
Chairs:Dr. Sanjeev Gunawardena, Air Force Institute of TechnologyDr. Damien Kubrak, Thales Alenia Space, France
1:50. Software Defined Radio Platform for GNSS Applications in Harsh Environments, P. Bataille, Syrlinks,France
1:50. Benchmarking CPUs and GPUs on Desktop PCs and Embedded Platforms, T. Pany, J. Dampf, C. Stöber,W. Bär, J. Winkel, IFEN GmbH, Germany; K. Fürlinger, Ludwig-Maximilians-University (LMU), Germany; P. Closas,Centre Tecnològic de Telecomunicacions de Catalunya, Communcation Systems, Spain
1:50. NAVSDR: A GPU-based Modular GNSS Software Receiver, L. Xu, Wuhan University, China; N.I. Ziedan,Zagazig University, Egypt; W. Guo, X. Niu, Wuhan University, China
1:50. Design and Implementation of Real-time Ultra-Broad Bandwidth Software Defined Receiver, J. Gao, X.Chen, P. Liu, W. Yu, Shanghai Jiao Tong University, China
1:50. Multi-GPGPU Based GNSS Real-time Software Receiver for Anti-Jamming Application, K. Park, J.S. Yang,Chungbuk National University, South Korea; M.J. Lee, Agency for Defense Development; C. Park, Chungbuk NationalUniversity, South Korea
1:50. Multi-Receiver Vector Tracking, Y. Ng and G. Xingxin Gao, University of Illinois at Urbana-Champaign
1:50. Software-Defined GPS Receiver implemented on the Parallella-16 Board, D. Olesen, J. Jakobsen, P.Knudsen, DTU Space, Denmark
1:50. Adaptive Multi-hypothesis Vector Tracking System – A Software Approach, M.O. Karaim, Queen’suniversity, Canada; M. Youssef, Applied Technology Center, Scientific Drilling International, USA; A. Noureldin, M.M.Atia, Royal Military College (RMC) of Canada
1:50. GESTALT: A Testbed for Experimentation and Validation of GNSS Software Receivers, J. Arribas, C.Fernandez–Prades, P. Closas, Centre Tecnològic de Telecomunicacions de Catalunya, Spain
1:50. CSSR: A 2FOR1 Compressive Sensing Software Receiver with Combined Correlation for GPS-CA andGalileo-OS Signals, A. Albu-Rghaif and I. Lami, The University of Buckingham, UK
1:50. Broadband Multi-frequency GNSS Signal Simulation with GPU, I. Bartunkova, B. Eissfeller, University FAFMunich, Germany
1:50. Performance Analysis of Deeply Coupled INS Assisted Multi-Carrier Vector Phase Lock Loop for HighDynamics, M. Adeel, X. Chen, X. Fang, P. Liu, W. Yu, Shanghai JiaoTong University, China
1:50. eNGene: An ARM Based Embedded Real-time Software GNSS Receiver, M. Troglia Gamba, M. Nicola andE. Falletti, Istituto Superiore Mario Boella, Italy
1:50. ION GNSS SDR Metadata Standard Working Group Report, S. Gunawardena, ChameleonChips.com
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss
F6: Remote Sensing; Space Applications; Timing and Scientific Applications 2Date: Friday, September 18, 2015Time: 1:45 AM - 4:55 AMRoom: Room 23
Chairs:Dr. Richard Langley, University of New Brunswick, CanadaDr. James Garrison, Purdue University
1:50. A New Estimation Algorithm for the GNSS-R Interference Pattern Technique: The SegmentedMaximum-Likelihood Technique, M.A. Ribot, C. Botteron, P.-A. Farine, ESPLAB - École Polytechnique Fédérale deLausanne (EPFL), Switzerland
1:50. GPS-Reflectometry Prototype for UAVs and in Flight Data Error Analysis, S. Ugazio, Politecnico di Torino,Italy; M. Troglia Gamba, Istituto Superiore Mario Boella, Italy; Y. Pei, Politecnico di Torino, Italy; G. Marucco, IstitutoSuperiore Mario Boella, Italy; P. Savi, L. Lo Presti, Politecnico di Torino, Italy
1:50. Weak GNSS Signal Navigation for Lunar Exploration Missions, N. Witternigg, G. Obertaxer, M. Schönhuber,Joanneum Research, Austria; G.B. Palmerini, F. Rodriguez, Sapienza Università di Roma, Italy; L. Capponi, C.Mozzetti, Spacesys, Italy; J-J. Floch, F. Soualle, D. Fernandez-Prim, Airbus DS GmbH, Germany; R.T. Ioannides,ESA-ESTEC, The Netherlands
1:50. Signal Polarization Selection for GPS-IR Remote Sensing – Theoretical Analysis and ExperimentalResults, Q. Chen, D. Won, D.M. Akos, K.M. Larson, E.E. Small, University of Colorado at Boulder
1:50. Results from the TechDemoSat-1 GNSS Reflectometry Experiment, M. Unwin, P. Jales, S. Duncan, SurreySatellite Technology Ltd., UK; J. Tye, University of Surrey, UK; C. Gommenginger, National Oceanographic Centre,UK; J. Rosello, European Space Agency
1:50. Design of a Ground-Based Beacon Signal for Calibration of Spaceborne GNSS Remote SensingInstruments, M. Buchanan, A.J. O'Brien, The Ohio State University; B. Block, University of Michigan
1:50. A Study of Relative Space Navigation Incorporating Direct and Reflected GNSS Signals: Simulation andAnalysis of Hubble Servicing Mission 4 Data, B.W. Ashman, and J. L. Garrison, Purdue University
1:50. Third Party On-Board Navigation Software for AGGA-4-Based Space GNSS Receivers: Test Results forGEO Mission, J.S. Silva, H.D. Lopes, P.F. Silva, DEIMOS Engenharia, Portugal; C. Valle, J. Pérez, A. Latorre,DEIMOS Space, Spain; C. Pommer, M. Sust, RUAG Space, Austria; J.A. Garcia-Molina, European Space Agency,The Netherlands
1:50. GNSS-Reflectometry Observables with Galileo E5 Signals, T. Peres, R. Castro, J. Carola, R. Capote, J.Bandeiras, J. Silva, N. Catarino, P.F. Silva, DEIMOS Engenharia, Porgugal
1:50. GNSS Receiver Based Navigation of Satellites in Geotransfer Orbits, I. Skog, B. Wahlberg, Royal Institute ofTechnology, Sweden; R. Larson, P. Bodin, P. Rathsman, OHB Sweden AB, Sweden
1:50. A Comparative Study of SBAS Systems for Navigation in Geostationary Orbit, E. Kahr, University ofCalgary, Canada; O. Montenbruck, German Aerospace Center (DLR), Germany; K. O’Keefe, University of Calgary,Canada
1:50. LION Navigator for Transfer to GEO using Electric Propulsion, M. Hartrampf, H. Filippi, P.A. Krauss, AirbusDS GmbH, Germany; O. Montenbruck, DLR-GSOC, Germany; E. Gottzein, University Stuttgart, Germany
1:50. A New Retrieval Method of Significant Wave Height Based on Statistics of Reflected BeiDou GEOSignals, W. Feng, Y. Dongkai, L. Weiqiang, Z. Yanzhong, Beihang University China
TECHNICAL PROGRAM
Plenary Session
ION GNSS+ 2015 • September 14–18, 2015 •Tampa, Florida • www.ion.org/gnss

Wednesday, September 1612:15 p.m. – 1:15 p.m., Exhibit Hall / Luncheon in the Exhibit HallThis event is included with all full conference, student exhibit only, and Wednesday single day registrations. See registration desk onsite to purchase tickets for guests.
5:30 p.m. – 7:00 p.m., Room 3Women in PNT Networking ReceptionWomen in Positioning, Navigation and Timing (PNT) is a voluntary networking initiative designed to support and engage women who are in the early stages of their careers with women who are established professionals in the field.Sponsored by:
6:00 p.m. – 8:00 p.m., Exhibit Hall / Exhibitor Hosted ReceptionJoin this year’s exhibitors as they host a social evening of information and cuisine. All exhibit booths will be open. Take this opportunity to review developments in GNSS technology, talk shop, get the specifics directly from the vendors, and learn about what has been happening in the GNSS marketplace during the past year. This event is included with any type of registration. Spouses and traveling companions 21 and older are welcome.
Thursday, September 1712:15 p.m. – 1:15 p.m., Exhibit Hall / Luncheon in the Exhibit HallThis event is included with all full conference, student exhibit only and Thursday single day registrations. See registration desk onsite to purchase tickets for guests.
Friday, September 1812:15 p.m. – 1:30 p.m., Tampa Convention Center Johannes Kepler and Bradford W. Parkinson Awards Luncheon
The purpose of the Kepler Award is to honor an individual for sustained and significant contributions to the development of satellite navigation. All members of the ION are eligible. Please submit names for considera- tion with a supporting letter to the Satellite Division Awards Committee Chair via the ION website prior to June 30.
The Bradford Parkinson Award, which honors Dr. Parkinson for his leadership in establishing both the U.S. Global Positioning Systems and the Satellite Division of The Institute of Navigation, is given to an outstanding graduate student in the field of Global Navigation Satellite Systems. The award includes a personalization plaque and a $2,500 honorarium. Any graduate student who is an ION member and is completing a degree program with an emphasis on GNSS technology, applications, or policy is eligible. Applications must be received by June 30. See www.ion.org for application requirements.
This event is included with a full, or Friday single day, conference registra-tion. Tickets for exhibitors, students and/or guests may be purchased using the registration form in this program or by visiting the ION registration desk onsite.
Previous Kepler Award Winners at ION GNSS+ 2014 (left to right): Dr. Chris Hegarty,Dr.ToddWalter,Mr.TomStansell,Dr.RichardLangley,Dr.GaryMcGraw,Dr. Per Enge, Dr. Pratap Misra, Dr. John Betz, Mr. Pat Fenton, Mr. Phil Ward, Mr. Karl Kovach and Dr. AJ Van Dierendonck.
Special Events and Programs

ClimateTampa Bay sees 361 days of sunshine per year, with an average daytime September temperature of 89 Fahrenheit/32 Celsius and 75 Fahrenheit/24 Celsius in the evenings.
Conference Location and ParkingThe conference will be held at the Tampa Convention Center, located at 333 S Franklin St, Tampa, FL 33602. There is plentiful parking at and around the Tam-pa Convention Center. The Convention Center’s parking garage charges $1.60 per hour. A full map of local parking options is available at http://bit.ly/1um67f7
Local TransportationTaxi: Estimated taxi fare from Tampa International Airport to the Tampa Conven-tion Center and official ION GNSS+ hotels is $25 each way.
Shuttle Service: Super Shuttle offers shuttle service from Tampa International Airport to both official ION GNSS+ conference hotels for $12 each way. Call 727-572-1111 (local) or 1-800-282-6817 (toll-free) to book by phone, or visit supershuttle.com to schedule online.
For more ION GNSS+ travel information, visit www.ion.org/gnss/travel.cfm
Session Papers OnlineRegistered attendees may download copies of conference presentations and papers online for FREE by logging in to the ION website at www.ion.org/gnss. Only pre-sentations and papers provided to the ION by the presenting author will be avail-able. Presentations will only be made available once the full technical paper is submitted. If a desired document is not available, we recommend you contact the author directly.
Visa Waiver Countries:Visa waiver travelers from ALL 27 Visa Waiver Program countries must present either a machine-readable passport or a U.S. Visa. To learn more about the Visa Waiver Program & Machine Readable Passports see http://travel.state.gov/visa.
Non-Visa Waiver Countries:We recommend that you apply for your Visa at least three months in advance. Currently there is a mandatory security check period of 30 days for people whose passports are issued from several countries. U.S. consular offices now interview most applicants as part of the application process. Please ensure you arrive at the embassy with all required documentation at the time of your interview. Note that the Institute does not intervene in U.S. State Department’s issuance of Visas.
Conference attendees requesting a visa letter to attend a conference must:
1. Submit the visa letter request form found at http://www.ion.org/gnss
2. Register and pay all conference registration fees BEFORE a letter of invitation will be sent.
Exemptions to this policy apply only to those authors whose papers have been accepted for presentation, company person-nel working in the exhibit area or trade associated press.
If the attendee is unable to secure a Visa, he/she will need to apply for a refund according to the printed refund rules of the event. Visa letter requests will only be reviewed AFTER you have submitted the Visa letter request form for your desired conference.
Travel and Business InformationVisas for International
Participants
Customize Your Conference ScheduleOnce you are registered for the conference, visit the ION website to build a customized schedule of presentations you wish to attend. Log in to the ION GNSS+ website at www.ion.org/gnss to create your schedule.
Conference ProceedingsOfficial conference proceedings are scheduled for distribution in November to all eligible conference participants.
Other Services An Internet Center will be provided at the Convention Center, where you may send and retrieve e-mail. A Business Center area will provide access to basic business services including copying and printer capabilities. A baggage coat check will be offered in the registration area.
Hotel Information
1. Make your hotel reservation at the Tampa Marriott Waterside Hotel and Marina or Embassy Suites Tampa – Downtown Convention Center. Make your reservation online at www.ion.org/gnss/hotel.cfm or by calling 1-847-996-5838, E-mail: [email protected]
2. Record your hotel confirmation number. You’ll need it to claim the $200 registration fee discount you’ll earn for staying in an official conference hotel.
3. Go to www.ion.org/gnss/registration.cfm to register for ION GNSS+. Rates for attendees registering by August 14, 2015 and staying in an official conference hotel start at:
•FullTechnicalRegistration:$960.00 •SingleDay:$400.00 •Student:$400.00 •Tutorials(percourse):$3754. Complete the online registration process. Be
sure to input your hotel confirmation number during the registration process to claim your discount.
5. Check in onsite at ION GNSS+ 2015
A PDF version of the full registration form is available online at www.ion.org/gnss/registration.cfm
See you in Tampa Bay!
Make your reservations by August 14 to qualify for special ION GNSS+ rates!
Headquarters Hotel:
Tampa Marriott Waterside Hotel and MarinaLocated on the water, across the courtyard from Tampa Convention Center. 700 South Florida Avenue Tampa, FL 33602 Rate: $165 single/double, limited government rate availability*Internet: Free in-room for ION GNSS+ attendees Parking: Valet parking $22 per day, or $1.60 per hour for self-parking in near by garage.August 14 is the last day that this rate will be available, but rooms at the discounted rates may fill up before then. Make your reserva-tions by August 14 to avoid missing out on discounted room rates!
Additional Hotel Option: Embassy Suites Tampa – Downtown Convention CenterAdjacent to the Tampa Convention Center513 South Florida AvenueTampa, FL 33602Rate: $155 single/double, limited government rate availability*Internet: Free in-room for ION GNSS+ attendees Parking: Valet parking $22 per day, or $1.60 per hour for self-parking in near by garage.Includes a complimentary breakfast.
Reserve Your Room Now and Save $200 in Registration Fees:•Online:Gotowww.ion.org/gnss/hotel.cfm•Phone:1-847-996-5838orTollFree1-800-696-7353•Email:[email protected]
If you cannot attend, be sure to cancel your room 72 hours prior to arrival. Failure to do so will result in forfeiture of one night’s deposit.
About Government Rates:Government rates are only for U.S. government personnel pay-ing for a room with a U.S. government issued credit card. Failure to pay with a U.S. government issued credit card will result in your reservation being honored at the group rate. Government contractors not traveling with government travel orders are not eligible for this rate. MITRE/Aerospace personnel do qualify.
All ION GNSS+ attendees staying at the Tampa Marriott Waterside Hotel and Marina or Embassy Suites Tampa–Downtown Convention Cen-ter will receive a $200 discount on their registration fees. You must have your hotel confirmation number dur-ing registration to claim this discount.
How to Register
www.ion.org/gnss/hotel.cfm
17
Hotel Information www.ion.org/gnss/hotel.cfm
How to Register
www.ion.org/gnss/registration.cfm

1
A. TECHNICAL MEETING AND EXHIBIT REGISTRATION: FULL REGISTRATION: Includes all sessions, luncheons, exhibitor hosted reception, and proceedings CD-ROM. (Individual registration benefits are non-transferable.) RECEIVED BY AUGUST 14 RECEIVED AFTER AUGUST 14 ION® Member & Corporate Member Rate:........................................................................ $1,100 $1,250 None Non-Member Rate: ........................................................................................................ $1,160 $1,310
STUDENT RATE: Full-time students with copy of student ID. Includes all sessions and Exhibitor Hosted Reception. Does not include Awards Luncheon or proceedings (may be purchased separately). .................................................................................................................................... $600 RETIRED RATE: Eligibility information and an application to receive the ION retirement rate is available by contacting the ION National Office. Only those members meeting all requirements will be eligible to receive the retirement rate. Registration and payment for those who qualify must be received by August 14.
SINGLE-DAY REGISTRATION: Includes sessions and lunch for the day registered. Proceedings may be purchased separately below. Wednesday, Sept 16: ....................................................................................................................... $600 Thursday, Sept 17: ........................................................................................................................... $600 Friday, Sept 18: ............................................................................................................................... $600
EXHIBITS ONLY REGISTRATION: Includes luncheons in Exhibit Hall and Exhibitor Hosted Reception. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .$600
DISCOUNT FOR HOTEL STAY: Save $200 on your registeration fees by staying at the Tampa Marriott Waterside or Embassy Suites Tampa Downtown.
Hotel Confirmation # Required (see page 31 for details): ..............................................................Discount ($200)
A. Total Technical Meeting Registration $B. TUTORIAL REGISTRATION MONDAY, SEPTEMBER 14, 2015 RECEIVED BY AUGUST 14 RECEIVED AFTER AUGUST 14 1:30 p.m. – 5:00 p.m.— Select one course only: Fundamentals of GNSS 1 : GPS Emphasis ............................................................................ $375 $425 None GNSS Receiver Design 1: RF Front-End Theory ..................................................................... $375 $425 Kalman Filter Applications to Integrated Navigation 1 ......................................................... $375 $425 Real-Time Kinematic (RTK) Positioning ............................................................................... $375 $425
6:00 p.m. – 9:30 p.m.— Select one course only: Fundamentals of GNSS 2 : GPS Emphasis ............................................................................. $375 $425 None GNSS Receiver Design 2: Baseband Signal Processing ........................................................... $375 $425 Kalman Filter Application to Integrated Navigation 2 ........................................................... $375 $425 Precise Point Positioning ..................................................................................................... $375 $425
TUESDAY, SEPTEMBER 15, 2015 RECEIVED BY AUGUST 14 RECEIVED AFTER AUGUST 14 9:00 a.m. – 12:30 p.m. — Select one course only: Introduction to Multi-Constellation GNSS Signals ................................................................. $375 $425 None Ubiquitous Positioning ....................................................................................................... $375 $425 Inertial Navigation – Sensors, Algorithms, and Performance ................................................ $375 $425 Introduction to GNSS Remote Sensing ................................................................................. $375 $425 IAutonomous Navigation and Smart Vehicles ...................................................................... $375 $425
1:30 p.m. – 5:00 p.m. — Select one course only: GNSS Effects for Aviation ..................................................................................................... $375 $425 None Robust and Resilient Navigation ......................................................................................... $375 $425 Image Aided Intertial Navigation ........................................................................................ $375 $425 GNSS for Smartphone Navigation ....................................................................................... $375 $425 Guidance, Navigation and Control of Small UAVs .................................................................. $375 $425
B. Total Tutorial Registration $C. A LA CARTE ITEMSAWARDS LUNCHEON: Friday, September 18 (For Students and Guests) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . $70PROCEEDINGS: (One complimentary CD-ROM is included in a Full Registration and will be mailed to you in November) Members: Proceedings CD-ROM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .$115 Non-Members: Proceedings CD-ROM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .$145 Students (full-time graduate or undergraduate): Proceedings CD-ROM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . $85 ION® MEMBERSHIP DUES: Purchase a membership now and qualify for the ION full-member registration rate Domestic: (mailing address inside the U.S.) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . $75 International: (mailing address outside the U.S.). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . $95
C. Total A La Carte Items $
Page 1 of 2Online registration and hotel reservations: www.ion.org/gnss
ION GNSS+ 2015 Tutorials and Conference Registration
fatima
Typewritten Text
$750
fatima
Typewritten Text
TOTALS (carried over from previous page)A. TECHNICAL MEETING OR EXHIBIT REGISTRATION...................................................................Total A: $___________ B. TUTORIAL REGISTRATION.....................................................................................................Total B: $___________C. A LA CARTE ITEMS................................................................................................................Total C: $___________
TOTAL $ Registrant Information (one person per form):Name ______________________________________________________ Company _____________________________________________________
Mailing Address ___________________________________________________________________________________________________________
City _________________________________________ State _______ Zip/Postal Code _________________________ Country ______________________
Phone __________________________________ Fax ______________________________ E-mail __________________________________________
q I am a speaker Dietary Restrictions: Vegetarian* Kosher Halal*
*Special meal only available at Award Luncheon upon 14 days advance notice. Meals in the exhibit hall will be served buffet style with vegetarian alternatives.
METHOD OF PAYMENT (Payment must accompany registration form and be received by August 15 to receive the early registration rate): Check for the full amount enclosed: Please mail form with payment to The Institute of Navigation, 8551 Rixlew Lane, Suite 360, Manassas, VA 20109-3701, USA.
Credit Card: If paying by credit card, send your registration form by fax to 703-366-2724 or via email to [email protected]. Do not mail a duplicate form. I understand that the card I have provided will be charged for my registration fees. If at a future date I request to have these fees refunded and charged to a different card, I will be assessed a $100 transaction fee.
Wire Transfer: The amount received by the ION must be for the total amount due for registration fees, inclusive of any bank fees. Email [email protected] for wire transfer details.
Account #: __________________________________________________ Exp. Date (required): _____ /_____ Choose One: VISA MasterCard American Express
Signature: __________________________________________________ Printed Name of Cardholder: ___________________________________________
Print three or four digit credit card security code : ________________ Billing Reference Code (Optional): ___________________________________________
TOTAL AMOUNT ION AUTHORIZED TO CHARGE $
Expect confirmation within one week. Please call the ION® if you have not received confirmation in the allotted time. No telephone registrations or purchase orders accepted. Please register one person per registration form. Registration forms may be copied.
Cancellation/Refund Policy: All cancellations/substitutions must be received in writing at the ION National Office. Fees for written cancellations received on, or prior to, August 14 are fully refundable. Written cancellations received August 15–August 31 are refundable less a $100 cancellation fee. The fee is to cover obligations incurred by the ION in making registration arrangements and does not entitle the registrant to any of the conference materials. Refunds will not be given for “no shows” or for cancellations received after August 31; however, full attendee substitutions for persons from the same organization may be made through September 18 at onsite registration. We regret that individual registration benefits are not transferable. Send cancellations and substitutions to the ION National Office via email at [email protected], or via fax at 1-703-366-2724.
Indemnification: Registrant agrees to indemnify and hold harmless The Institute of Navigation and their respective members, officers, directors, agents and employees from and against any and all liabilities, damages, costs, losses, claims and expenses (including attorneys’ fees), on account of personal injury, death, damage to or loss of property, loss of profits, acts of omission, negligence, fault or violation of law or ordinance, cancellation or postponements of event due to acts of God, war, government regulation, strike, availability of goods and services, military actions, civil disorder, terrorism and/or biological/chemical terrorism (directly or indirectly caused by, resulting from or in connection with any act of or threat of or fear or terrorism whether actual or perceived), disaster, strikes, curtailment of transportation facilities or any other emergency beyond the parties’ control making it inadvisable, illegal or that materially affects the Institute’s ability to hold the meeting.
Submit Form to: Fax: 703-366-2724Online registration and hotel reservations: www.ion.org/gnss
ION National Office - 8551 Rixlew Lane, Suite 360, Manassas, VA 20109 Phone: 703-366-2723, Fax: 703-366-2724, Web: www.ion.org, Email: [email protected]
2
Page 2 of 2Please complete the registrant information below (one person per form)
ION GNSS+ 2015 Tutorials and Conference Registration