
Investigation on the performance of low-cost single ... · Investigation on the performance of...
29
Investigation on the performance of low-cost single frequency GPS Zhenzhong Su, Alain Geiger, Philippe Limpach Institute of Geodesy and Photogrammetry, ETH Zurich, Switzerland X-Sense partners: Fabian Neyer, Jan Beutel, Lothar Thiele, Hugo Raetzo, Stephan Gruber, Tazio Strozzi
Transcript of Investigation on the performance of low-cost single ... · Investigation on the performance of...
Investigation on the performance of low-cost single frequency GPS Zhenzhong Su, Alain Geiger, Philippe Limpach
Institute of Geodesy and Photogrammetry, ETH Zurich, Switzerland
X-Sense partners: Fabian Neyer, Jan Beutel, Lothar Thiele, Hugo Raetzo, Stephan Gruber, Tazio Strozzi

Introduction of project X-Sense
Thursday, 01 March 2012 1 Zhenzhong Su
X-Sense:
• Geo-monitoring with GPS; Communication through WLAN
• Solar panel for battery charging
• Data processing in server; Data visualization online
• Integrate various sensing dimensions

X-Sensor project partnership:
Thursday, 01 March 2012 2 Zhenzhong Su
Prof. Alain Geiger
Dr. Philippe Limpach
MSc Fabian Neyer
MSc Zhenzhong Su
Prof. Lothar Thiele
Dr. Jan Beutel
MSc Bernhard Buchli
MSc Tonio Gsell
MSc Matthias Keller
Dr. Stephan Gruber
MSc Vanessa Wirz
Dr. Tazio Strozzi
Dr. Hugo Raetzo

Overview
Motivation
PCV determination via an absolute calibrated reference receiver antenna
Results and validations
Conclusion
3 Thursday, 01 March 2012 Zhenzhong Su

Overview
Motivation
PCV determination via an absolute calibrated reference receiver antenna
Results and validations
Conclusion
4 Thursday, 01 March 2012 Zhenzhong Su

Motivation
Thursday, 01 March 2012 5 Zhenzhong Su
Low-cost single frequency GPS equipment developed in X-Sense
Ublox chip, trimble bullet III antenna

Motivation
Time series of GPS daily static solutions
Thursday, 01 March 2012 6 Zhenzhong Su
Repeatability Daily static
Std_E 2 mm
Std_N 2 mm
Std_H 3 mm
Repeatability Kinematic
Std_E 9 mm
Std_N 8 mm
Std_H 18 mm

Motivation
To provide sub-daily solutions instead of daily solutions in future Battery save and distribution Higher resolution of coordinate evolution
For short baseline most of the systematic GPS errors are eliminated in double difference processing, only the antenna Phase center variations (PCV) is neither available nor considered for low-cost antenna.
Thus we decide to estimate the antenna PCV and apply it to correct the phase measurements for better sub-daily solutions.
Thursday, 01 March 2012 7 Zhenzhong Su

Overview
General introduction
PCV determination via an absolute calibrated reference receiver antenna
Results and validations
Conclusion
8 Thursday, 01 March 2012 Zhenzhong Su

Phase Center Variations:
Thursday, 01 March 2012 9 Zhenzhong Su
PCV determination via an absolute calibrated reference receiver antenna
∑∑= =
−+−=∆max max
1 000 )](sin)(cos)[(cos~),(
n
n
m
mnmnmnm mbmazPz αααααϕ
Normalized associated legendre functions of degree n and order m
Azimuth angle of the satellite line of sight
Zenith angle of the satellite line of sight
Antenna orientation
PCV determination via an absolute calibrated reference receiver antenna
Thursday, 01 March 2012 10 Zhenzhong Su
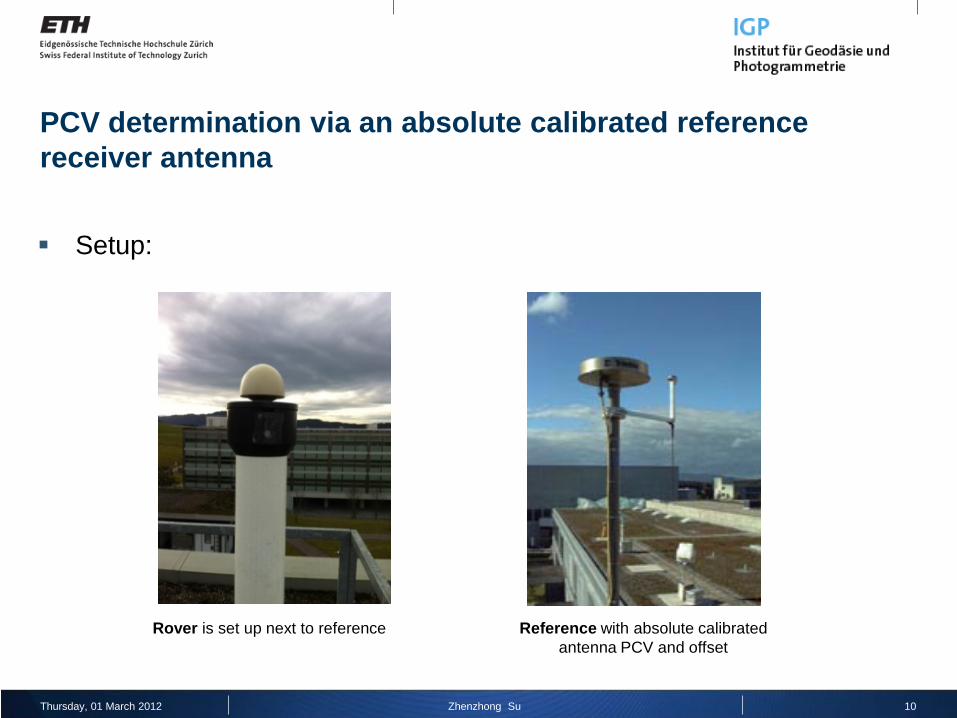
Setup:
Reference with absolute calibrated antenna PCV and offset
Rover is set up next to reference
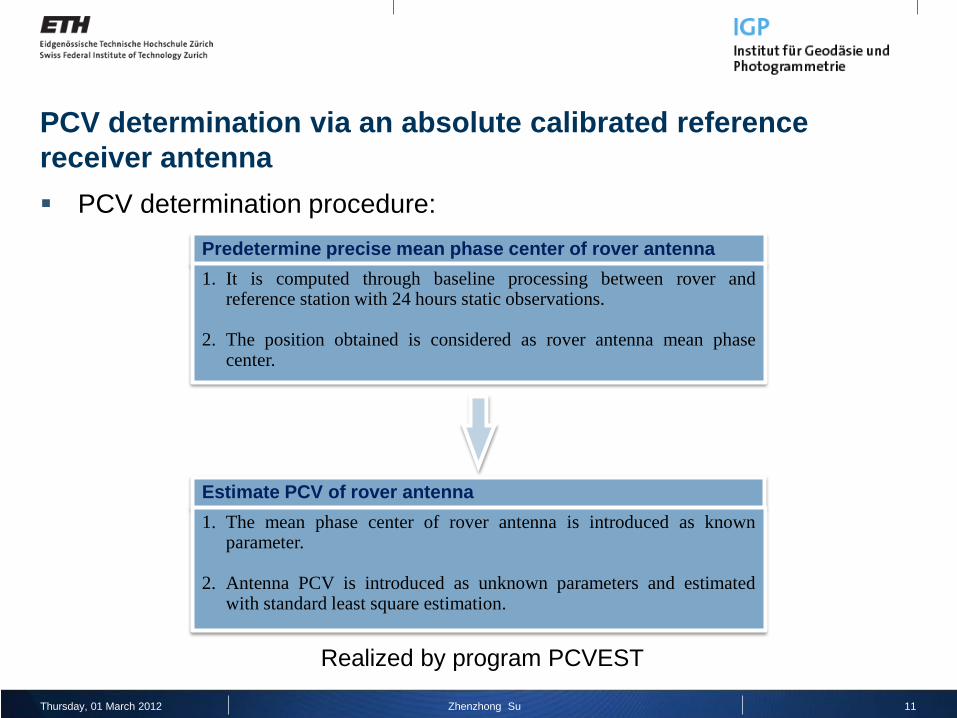
PCV determination via an absolute calibrated reference receiver antenna PCV determination procedure:
Thursday, 01 March 2012 11 Zhenzhong Su
Predetermine precise mean phase center of rover antenna 1. It is computed through baseline processing between rover and
reference station with 24 hours static observations.
2. The position obtained is considered as rover antenna mean phase center.
Estimate PCV of rover antenna 1. The mean phase center of rover antenna is introduced as known
parameter.
2. Antenna PCV is introduced as unknown parameters and estimated with standard least square estimation.
Realized by program PCVEST

PCV determination via an absolute calibrated reference receiver antenna
Thursday, 01 March 2012 12 Zhenzhong Su
PCVEST Import precise Satellite Ephemerids
& GPS Observations
Detect outliers and synchronize receiver clock to GPS time with code observations
Form double difference equations
Standard atmosphere model for troposphere / ionosphere
Cycle slips detection and repair
Solve ambiguity integers
Estimate PCVs
Coordinates of reference and rover
BPE script: PCVEST (BPE:Bernese processing engine)
pcvtropionsatrec NIIccL ϕλδδρ ∆+⋅++−⋅−⋅+=
[ ] ebbaaAL
eLT
mnmn
pcv
+⋅=∇
+∆∇=∇
,0,1,0,1 ......
ϕ

Overview
General introduction
PCV determination via an absolute calibrated reference receiver antenna
Results and validations
Conclusion
13 Thursday, 01 March 2012 Zhenzhong Su

Results and validations:
Thursday, 01 March 2012 14 Zhenzhong Su
azimuth
Zenith
Estimated antenna PCV
Estimated in day 188
Zenith : 0° 80°
[mm]
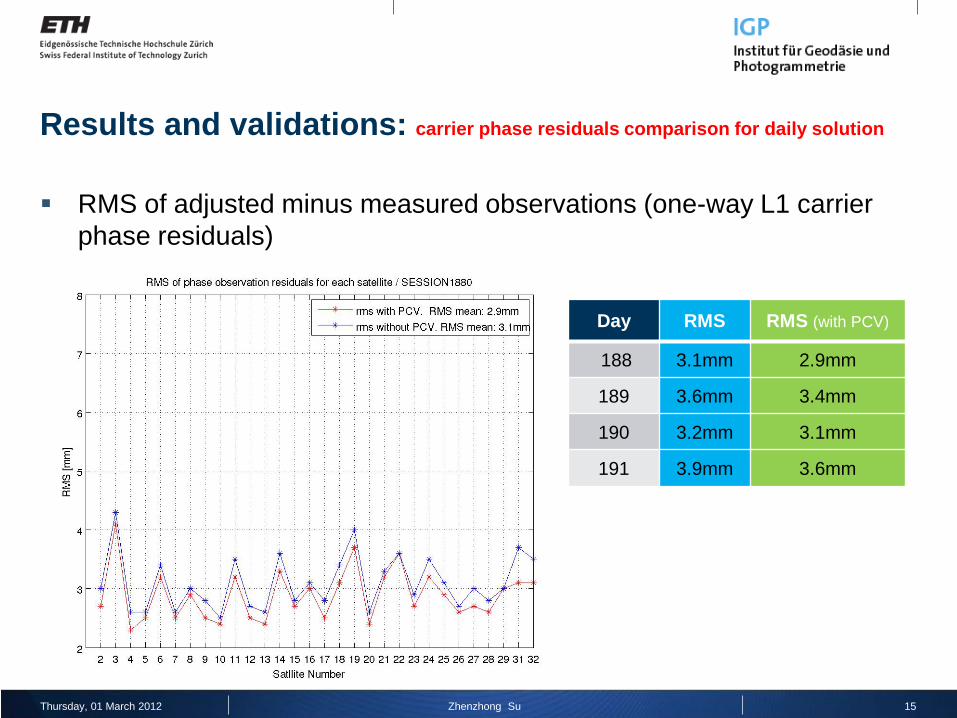
Results and validations: carrier phase residuals comparison for daily solution
Thursday, 01 March 2012 15 Zhenzhong Su
RMS of adjusted minus measured observations (one-way L1 carrier phase residuals)
Day RMS RMS (with PCV)
188 3.1mm 2.9mm
189 3.6mm 3.4mm
190 3.2mm 3.1mm
191 3.9mm 3.6mm

Thursday, 01 March 2012 16 Zhenzhong Su
Results and validations: carrier phase residuals comparison for daily solution
Day 188

Thursday, 01 March 2012 17 Zhenzhong Su
Results and validations: carrier phase residuals comparison for daily solution
Day 189

Thursday, 01 March 2012 18 Zhenzhong Su
Results and validations: carrier phase residuals comparison for daily solution
Day 190

Thursday, 01 March 2012 19 Zhenzhong Su
Results and validations: carrier phase residuals comparison for daily solution
Day 191

Results and validations: Improvement of sub-daily (2 Hour) solutions with PCV
Day 188 RMS(without PCV) RMS(with PCV) Improvement dN [mm] 3.2 1.6 50%
dE [mm] 2.2 1.1 50%
dU [mm] 9.2 5.1 45%
Thursday, 01 March 2012 20 Zhenzhong Su
Day 189 RMS(without PCV) RMS(with PCV) Improvement dN [mm] 2.6 1.3 50%
dE [mm] 4.9 1.6 67%
dU [mm] 6.2 5.5 11%
Day 190 RMS(without PCV) RMS(with PCV) Improvement dN [mm] 3.7 3.0 19%
dE [mm] 4.9 3.1 37%
dU [mm] 7.8 5.1 34%
Day 191 RMS(without PCV) RMS(with PCV) Improvement dN [mm] 3.6 1.7 36%
dE [mm] 7.8 1.7 78%
dU [mm] 7.7 5.6 27%

Results and validations: Improvement of sub-daily (2 Hour) solutions with PCV
Thursday, 01 March 2012 21 Zhenzhong Su
Day 188

Results and validations: Improvement of sub-daily (2 Hour) solutions with PCV
Thursday, 01 March 2012 22 Zhenzhong Su
Day 189

Results and validations: Improvement of sub-daily (2 Hour) solutions with PCV
Thursday, 01 March 2012 23 Zhenzhong Su
Day 190

Results and validations: Improvement of sub-daily (2 Hour) solutions with PCV
Thursday, 01 March 2012 24 Zhenzhong Su
Day 191

Thursday, 01 March 2012 25 Zhenzhong Su
Results and validations: Slight improvement of kinematic coordinates with PCV
Day 188 RMS(without PCV) RMS(with PCV) Improvement dN [mm] 4.5 4.3 2.2%
dE [mm] 3.6 3.5 2.7%
dU [mm] 5.8 5.5 5.2%
Day 189 RMS(without PCV) RMS(with PCV) Improvement dN[mm] 5.1 4.8 5.9%
dE [mm] 4.4 4.3 2.2%
dU [mm] 6.3 5.9 6.3%
Day 190 RMS(without PCV) RMS(with PCV) Improvement dN[mm] 5.1 4.8 5.9%
dE [mm] 4.1 4.0 2.4%
dU [mm] 5.6 5.3 5.4%
Day 191 RMS(without PCV) RMS(with PCV) Improvement dN [mm] 5.5 5.1 7.3%
dE [mm] 4.4 4.4 0%
dU [mm] 6.7 6.4 4.5%

Overview
General introduction
PCV determination via an absolute calibrated reference receiver antenna
Results and validations
Conclusion
26 Thursday, 01 March 2012 Zhenzhong Su

The PCV value of Trimble Bullet III antenna with respect to the mean phase center ranges within 2 cm for our experiment.
The phase residuals are decreased by using PCV correction.
Using the estimated PCV to correct phase measurements does improve the sub-daily solutions as well as kinematic solutions.
To do:
Thursday, 01 March 2012 27 Zhenzhong Su
Conclusion:
Select a day when Rover has no
movement On-site PCV estimation
Apply PCV correction (as long as the antenna
has the same orientation)
A procedure for low-cost single frequency GPS receiver on-site PCV estimation.
Thanks for your attention!
Acknowlegement is given to Swiss National Science Foundation (SNSF) and Naro-tera.
Welcome for questions.


















