Inverse obstacle scattering for elastic waveslipeijun/paper/2016/LWWZ_IP_2016.pdfInverse obstacle...
25
This content has been downloaded from IOPscience. Please scroll down to see the full text. Download details: IP Address: 128.210.107.25 This content was downloaded on 07/10/2016 at 19:46 Please note that terms and conditions apply. Inverse obstacle scattering for elastic waves View the table of contents for this issue, or go to the journal homepage for more 2016 Inverse Problems 32 115018 (http://iopscience.iop.org/0266-5611/32/11/115018) Home Search Collections Journals About Contact us My IOPscience
Transcript of Inverse obstacle scattering for elastic waveslipeijun/paper/2016/LWWZ_IP_2016.pdfInverse obstacle...

This content has been downloaded from IOPscience. Please scroll down to see the full text.
Download details:
IP Address: 128.210.107.25
This content was downloaded on 07/10/2016 at 19:46
Please note that terms and conditions apply.
Inverse obstacle scattering for elastic waves
View the table of contents for this issue, or go to the journal homepage for more
2016 Inverse Problems 32 115018
(http://iopscience.iop.org/0266-5611/32/11/115018)
Home Search Collections Journals About Contact us My IOPscience

Inverse obstacle scattering for elasticwaves
Peijun Li1,4, Yuliang Wang2, Zewen Wang3 and Yue Zhao1
1Department of Mathematics, Purdue University, West Lafayette, IN 47907, USA2Department of Mathematics, Hong Kong Baptist University, Kowloon, Hong Kong3 School of Science, East China University of Technology, Nanchang, Jiangxi, 330013,Peopleʼs Republic of China
E-mail: [email protected], [email protected], [email protected] [email protected]
Received 2 March 2016, revised 24 August 2016Accepted for publication 21 September 2016Published 7 October 2016
AbstractConsider the scattering of a time-harmonic plane wave by a rigid obstaclewhich is embedded in an open space filled with a homogeneous and isotropicelastic medium. An exact transparent boundary condition is introduced toreduce the scattering problem into a boundary value problem in a boundeddomain. Given the incident field, the direct problem is to determine the dis-placement of the wave field from the known obstacle; the inverse problem is todetermine the obstacle’s surface from the measurement of the displacement onan artificial boundary enclosing the obstacle. In this paper, we consider boththe direct and inverse problems. The direct problem is shown to have a uniqueweak solution by examining its variational formulation. The domain derivativeis derived for the displacement with respect to the variation of the surface. Acontinuation method with respect to the frequency is developed for the inverseproblem. Numerical experiments are presented to demonstrate the effective-ness of the proposed method.
Keywords: elastic wave equation, inverse obstacle scattering, domainderivative
(Some figures may appear in colour only in the online journal)
1. Introduction
A basic problem in scattering theory is the scattering of a time-harmonic wave by animpenetrable medium, which is known as the obstacle scattering problem [7]. Given the
Inverse Problems
Inverse Problems 32 (2016) 115018 (24pp) doi:10.1088/0266-5611/32/11/115018
4 Author to whom any correspondence should be addressed.
0266-5611/16/115018+24$33.00 © 2016 IOP Publishing Ltd Printed in the UK 1

incident field, the direct obstacle scattering problem is to determine the wave field from theknown obstacle; the inverse obstacle scattering problem is to determine the shape of theobstacle from the measurement of the wave field. The obstacle scattering problems have beenwidely studied for acoustic and electromagnetic waves by numerous researchers [4, 19]. Alarge amount of information is available regarding their solutions for the governing Helmholtzand Maxwell equations [8, 26].
Recently, the elastic wave scattering problems have received ever increasing attention inboth the engineering and mathematical communities for their significant applications in manyscientific areas such as geophysics and seismology [21]. The elastic wave is governed by theNavier equation which is more complex due to coupling of the compressional and shearwaves. The inverse elastic obstacle scattering problem is investigated mathematically in [12]for the uniqueness and numerically in [14, 24] for the shape reconstruction. We refer to[10, 15–17, 20, 22, 25] for some related direct and inverse scattering problems for elasticwaves.
In this paper, we consider both the direct and inverse obstacle scattering problems for thetwo-dimensional elastic wave equation. The purpose of this work is fourfold:
(1) Develop an exact transparent boundary condition to reduce the scattering problemequivalently into a boundary value problem in a bounded domain.
(2) Establish the existence and uniqueness of the solution for the direct problem by studyingits variational formulation.
(3) Characterize the domain derivative of the wave field with respect to the variation of theobstacle’s surface.
(4) Propose a continuation method with respect to the frequency to reconstruct the obstacle’ssurface.
The obstacle is assumed to be an elastically rigid body which is embedded in an openspace filled with a homogeneous and isotropic elastic medium. By introducing an exacttransparent boundary condition on a circle enclosing the obstacle, we formulate the scatteringmodel into a boundary value problem in a bounded domain. We show that the direct problemhas a unique weak solution by studying its variational formulation. The proofs are based onasymptotic analysis of the boundary operator, the Helmholtz decomposition, and the Fred-holm alternative theorem.
The calculation of domain derivatives, or more generally Fréchet derivatives of the wavefield with respect to the perturbation of the boundary of the scatterer, is an essential step forinverse scattering problems. The domain derivatives of the inverse obstacle scattering pro-blems have been discussed by many authors for the acoustic and electromagnetic waves[11, 18, 20, 27]. Recently, the domain derivative is studied in [5, 23] for the elastic wave byusing boundary integral equations. Here we present a variational approach and give anexplicit characterization of the domain derivative. We show that the domain derivative is theunique weak solution of some boundary value problem which shares essentially the samevariational formulation as the direct scattering problem. Therefore, the domain derivative canbe efficiently computed by solving a direct problem.
We propose a continuation method to solve the inverse problem. The method requiresmulti-frequency scattering data and proceed with respect to the frequency. At each step, weapply the steepest descent method with the starting point given by the output from theprevious step, and create an approximation to the surface filtered at a higher frequency.Numerical experiments are presented to demonstrate the effectiveness of the method. Werefer to [2, 3, 6, 29] for solving related inverse surface scattering problems by using multiple
Inverse Problems 32 (2016) 115018 P Li et al
2

frequency data. A topic review can be found in [1] for solving general inverse scatteringproblems with multi-frequencies to gain increased stability.
The paper is organized as follows. Section 2 introduces the model problem and presentssome notation and Sobolev spaces. The direct problem is discussed in section 3. Boundaryvalue problems are formulated by using transparent boundary conditions. Uniqueness andexistence are established for the variational problem of the direct scattering. Section 4 isdevoted to the inverse problem. The domain derivative is derived for the wave field withrespect to the surface. A continuation method is introduced for solving the inverse problem.Numerical experiments are presented in section 5. The paper is concluded with some remarksin section 6.
2. Problem formulation
Consider a two-dimensional elastically rigid obstacle, which is described by the boundeddomain D with Lipschitz continuous boundary ¶D. Denote by n n n= ,1 2( ) and t t t= ,1 2( )the unit normal and tangential vectors on ¶D, where t n=1 2 and t n= -2 1. Suppose thatthe infinite exterior domain D2⧹ ¯ is filled with a homogeneous and isotropic elastic mediumwith a unit mass density. Denote by = Î <x xB R:2{ ∣ ∣ } the ball with radius >R 0 suchthat ÌD B¯ . Let the sphere ¶ = Î =x xB R:2{ ∣ ∣ } be the boundary of B. Denote byW = B D⧹ ¯ the bounded domain enclosed by ¶D and ¶B.
Let the obstacle be illuminated by a time-harmonic plane wave uinc, which satisfies thetwo-dimensional Navier equation:
m l m wD + + + =u u u D0 in , 2.1inc inc 2 inc 2( ) · ⧹ ¯ ( )
where w > 0 is the angular frequency, λ and μ are the Lamé constants satisfying m > 0 andl m+ > 0. The incident field can be either a compressional plane wave:
= ku de , 2.2x dinc i 1 ( )·
or a shear plane wave:
= k^u d e , 2.3x dinc i 2 ( )·
where j j j j= = -^d dcos , sin , sin , cos( ) ( ) , j pÎ 0, 2[ ] is the incident angle
kw
l mk
wm
=+
=2
and , 2.41 2 ( )
are the compressional wavenumber and the shear wavenumber, respectively.The displacement of the total wave field u also satisfies the Navier equation:
m l m wD + + + =u u u D0 in . 2.52 2( ) · ⧹ ¯ ( )
Since the obstacle is assumed to be elastically rigid, it holds that
= ¶u D0 on . 2.6( )
The total wave u consists of the incident wave uinc and the scattered wave v:
= +u u v.inc
Subtracting (2.1) from (2.5) yields
m l m wD + + + =v v v D0 in . 2.72 2( ) · ⧹ ¯ ( )
Inverse Problems 32 (2016) 115018 P Li et al
3

Let =w w w,1 2( ) and w be a vector and scalar function, respectively. Introduce
⎡⎣⎢
⎤⎦⎥ =
¶ ¶¶ ¶
ww w
w wx x
x x
1 1
2 2
1 2
1 2
and two curl operators
= ¶ - ¶ = ¶ -¶w w w w w wcurlcurl , , .x x x x2 11 2 2 1( )
For any solution v of (2.7), the Helmholtz decomposition splits it into its compressional andshear parts:
f f= +v curl , 2.81 2 ( )
where f =j, 1, 2j are scalar potential functions. Substituting (2.8) into (2.7) gives
l m f w f m f w f + D + + D + =curl2 0,12
1 22
2[( ) ] ( )
which is fulfilled if fj satisfy the Helmholtz equation
f k fD + = 0. 2.9j j j2 ( )
In addition, fj are required to satisfy the Sommerfeld radiation condition
r f k f r¶ - = =r
r¥
xlim i 0, . 2.10j j j1 2 ( ) ∣ ∣ ( )
Given the incident field uinc, the direct problem is to determine the displacement of thetotal field u for the known obstacle D. The inverse problem is to determine the obstacle’ssurface ¶D from the boundary measurement of the displacement u on ¶B, for the givenincident field uinc.
We introduce some functional spaces. Let W = W ´ WL L L2 2 2 2( ) ( ) ( ) be the productspace of WL2 ( ) equipped with the inner product and norm:
ò= =W
W u v u v x u u u, d , , .0,1 2( ) · ¯ ( )
For a given function w on ¶B, it has the Fourier series expansion
òåq
pq q= =q
pq
Î
-w R w w w R, e ,1
2, e d .
n
n n n ni
0
2i( ) ( )( ) ( )
Let WHs ( ) and ¶H Bs ( ) be the standard Sobolev spaces with the norms given by
òå åp= = +
a
aW
W¶
Î x xw D w w n w Rd , 2 1 .s
ss B
n
s n,
2 2,
2 2 2∣ ( )∣ ( ) ∣ ( )∣∣ ∣
( )
Define W = Î W = ¶¶H w H w D: 0 onD1 1( ) { ( ) }. Let W = W ´ W¶ ¶ ¶H H HD D D
1 2 1 1( ) ( ) ( ) and¶ = ¶ ´ ¶H B H B H Bs s s2( ) ( ) ( ) be the Cartesian product spaces equipped with the
corresponding 2-norms of W¶H D1 ( ) and ¶H Bs ( ), respectively. It is known that ¶-H Bs 2( ) is
the dual space of ¶H Bs 2( ) with respect to the inner product
ò=¶¶
u v u v s, d .BB
⟨ ⟩ · ¯
Define the inner product in 2:
* = " Îu v v u u v, , , ,2⟨ ⟩
where *v is the conjugate transpose of v. Throughout the paper, we take the notation of a bor a b to stand for a Cb or a Cb, where C is a positive constant.
Inverse Problems 32 (2016) 115018 P Li et al
4

3. Direct scattering
In this section, we consider the direct scattering problem and show that it has a unique weaksolution by studying its variational formulation.
3.1. Transparent boundary conditions
In the exterior domain B2⧹ ¯, it follows from the radiation condition (2.10) that the solutionsof (2.9) have Fourier series expansions in the polar coordinates
åf r q
k r
kf= q
Î
H
H RR, e , 3.1j
n
n j
n jjn n
1
1i( )
( )( )
( ) ( )( )
( )( )
where Hn1( ) is the Hankel function of the first kind with order n.
We define two boundary operators
T
åq k= q
Îw R
Rh R w,
1e , 3.2j
nn j
n ni( )( ) ( ) ( )( )
where = ¢h z zH z H zn n n1 1( ) ( ) ( )( ) ( ) . It can be shown from the properties of the Hankel functions
in [30] that
< > " >h z h z zRe 0, Im 0, 0. 3.3n n( ) ( ) ( )Taking the derivative of (3.1) with respect to ρ, evaluating it at r = R, and using theboundary operators (3.2), we get the transparent boundary conditions
Tf f¶ = ¶r Bon . 3.4j j j ( )
It is shown in [9] that Tj is a bounded linear operator from ¶H B1 2 ( ) to ¶-H B1 2 ( ).Furthermore, the following result can be easily proved by using (3.3). The proof is omitted forsimplicity.
Lemma 3.1. It holds that
T T " Î ¶¶ ¶w w w w w H BRe , 0, Im , 0, .j B j B1 2⟨ ⟩ ⟨ ⟩ ( )
If T =¶w wRe , 0j B⟨ ⟩ or T =¶w wIm , 0j B⟨ ⟩ , then =w 0 on ¶B.
In the frequency domain, the transparent boundary conditions (3.4) become
f a f ak k
k¶ = =r
¢
R RH R
H R, . 3.5j
njn
jn
jn j n j
n j
1
1( ) ( ) ( )
( )( )
( )( ) ( ) ( ) ( )( )
( )
Taking ¶rr of (3.1) and evaluating them at r = R yields
f b f bk k
k¶ = =rr
R RH R
H R, . 3.6j
njn
jn
jn j n j
n j
2 1
1( ) ( ) ( )
( )( )
( )( ) ( ) ( ) ( )( )
( )
The polar coordinates r q,( ) are related to the Cartesian coordinates =x x x,1 2( ) byr q r q= =x xcos , sin1 2 , with the local orthonormal basis r qe e, :
q q q q= = -r qe ecos , sin , sin , cos .( ) ( )
For any vector =w w w,1 2( ) given in the Cartesian coordinates, it has a representation in thepolar coordinates = +r qw e ew w1 2ˆ ˆ , which will be still denoted as =w w w,1 2( ˆ ˆ ) for
Inverse Problems 32 (2016) 115018 P Li et al
5

simplicity. For any function w, it is easy to verify that
⎛⎝⎜
⎞⎠⎟
⎛⎝⎜
⎞⎠⎟
r r = ¶ ¶ = ¶ -¶r q q rw w w w w wcurl,
1,
1,
and
⎛⎝⎜
⎞⎠⎟r r
D = ¶ + ¶ + ¶rr r qqw w1 1
.2
In the new coordinates, the Helmholtz decomposition (2.8) takes the form
⎛⎝⎜
⎞⎠⎟
fr
fr
f f= ¶ + ¶ ¶ - ¶r q q rv1
,1
. 3.71 2 1 2 ( )
Taking the Fourier transform of (3.7) at r = R and applying the boundary condition (3.5), weobtain
⎡
⎣⎢⎢
⎤
⎦⎥⎥
⎡⎣⎢⎢
⎤⎦⎥⎥
a
a
f
f=
-v R
R
R. 3.8n
n n
Rn
Rn
n
n
1i
i2
1
2
( )( )
( )( )( )
( )
( )
( )
( )
Taking ¶r of (3.7), applying the Fourier transform, and using (3.5) and (3.6), we have
⎡
⎣⎢⎢
⎤
⎦⎥⎥
⎡⎣⎢⎢
⎤⎦⎥⎥
b a
a b
f
f¶ =
- +
- + -rv R
R
R. 3.9n
n n
R
n
Rn
n
R
n
Rn n
n
n
1i i
2
i i1 2
1
2
2
2
( ) ( )( )
( )( )( )
( ) ( )
( ) ( )
( )
( )
It follows from (2.8) that
⎛⎝⎜
⎞⎠⎟f
r rf = D = ¶ + ¶ + ¶rr r qqv
1 1,1 2 1·
which yields after taking the Fourier transform that
⎜ ⎟⎛⎝⎜
⎛⎝
⎞⎠
⎞⎠⎟b a f = + -v R
R
n
RR
1. 3.10n n n n
1 1
2
1( · ) ( ) ( ) ( )( ) ( ) ( ) ( )
Define a boundary operator for the displacement of the scattered wave
B m l m= ¶ + + ¶r rv v v e Bon ,( )( · )
which gives after taking the Fourier transform and using (3.9) and (3.10) that
B
⎡
⎣⎢⎢
⎤
⎦⎥⎥
⎡⎣⎢⎢
⎤⎦⎥⎥
⎡⎣⎢⎢
⎤⎦⎥⎥
⎡⎣⎢⎢
⎤⎦⎥⎥
mb a
a b
f
f
l m b a f
f
=- +
- + -
+ + + -
v RR
R
R
R
0
0 0. 3.11
n
n n
R
n
Rn
n
R
n
Rn n
n
n
nR
n n
R
n
n
1i i
2
i i1 2
1
2
11
1 1
2
2
2
2
2
( ) ( )( )
( )
( )( )
( )( )
( )( ) ( )
( ) ( )
( )
( )
( ) ( ) ( )
( )
Inverse Problems 32 (2016) 115018 P Li et al
6

Combining (3.8) and (3.11) yields the transparent boundary condition:
B T
å= ¶q
Îv v vM Be on , 3.12
nn
n ni≔ ( )( )
where
⎡⎣⎢⎢
⎤⎦⎥⎥
⎡⎣⎢⎢
⎤⎦⎥⎥= = L-M
M M
M M
N N
N N.n
n n
n n n
n n
n n11 12
21 22
1 11 12
21 22
( ) ( )
( ) ( )
( ) ( )
( ) ( )
Here
⎜ ⎟⎛⎝
⎞⎠ a aL = -
n
Rn
n n2
1 2( ) ( )
and
⎜ ⎟
⎜ ⎟
⎛⎝
⎞⎠
⎛⎝
⎞⎠
a x m h x m a h
m a h m b m h ma b
=- + = - +
=- + = -
Nn
RN
n
R
n
R
Nn
R
n
RN
n
R
,i i
,
i i, ,
n n n n n n n n
n n n n n n n n
11 2
2
2 12 1 2
21 2 1 2 22
2
1 1 2
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
where
⎜ ⎟⎛⎝⎜
⎛⎝
⎞⎠
⎞⎠⎟x l m b l m a h a= + + + - = -
R
n
R R2
1,
1.n n n
jn
jn
1 1
2
( ) ( )( ) ( ) ( ) ( ) ( )
Remark 3.2. It is clear to note from (3.3) that a k= h R Rjn
n j( )( ) and
a a a aL = - - > " ÎnIm Re Im Re Im 0, .nn n n n
1 2 2 1( ) ( ) ( ) ( )
Thus we have L ¹ " În0,n .
Using the asymptotic expansions of the Hankel functions
⎛⎝⎜
⎞⎠⎟= - + +
¢H z
H z
n
z
z
nO
n2
1n
n
1
1 2
( )( )
∣ ∣∣ ∣ ∣ ∣
( )
( )
and
⎛⎝⎜
⎞⎠⎟=
+- +
H z
H z
n n
zO
n
11
1,n
n
1
1 2
( )( )
∣ ∣(∣ ∣ )∣ ∣
( )
( )
we obtain
⎛⎝⎜
⎛⎝⎜
⎞⎠⎟
⎞⎠⎟
⎛⎝⎜
⎛⎝⎜
⎞⎠⎟
⎞⎠⎟
⎛⎝⎜
⎛⎝⎜
⎞⎠⎟
⎞⎠⎟
k k
ak
bk
L =+
+
=- - +
=+
- +
On
n
R
R
nO
n
n n
R
R
nO
n
21
1,
12
1,
11
1.
n
jn j
jn j
12
22
2
2 3
2
2
2 3
∣ ∣
∣ ∣ ( )∣ ∣ ∣ ∣
∣ ∣(∣ ∣ ) ( )∣ ∣ ∣ ∣
( )
( )
Inverse Problems 32 (2016) 115018 P Li et al
7

Noting (2.4) and combining the above estimates, we may verify that
⎡⎣⎢
⎤⎦⎥
⎡⎣⎢
⎤⎦⎥
⎡⎣⎢
⎤⎦⎥
⎡⎣⎢
⎤⎦⎥
m l ml m
m l ml m
m l ml m
m l ml m
= -++
+ =++
+
= -++
+ = -++
+
MR
n O MR
n O
MR
n O MR
n O
2 2
31 , i
31 ,
i3
1 ,2 2
31 .
n n
n n
11 12
21 22
( )( )
∣ ∣ ( ) ( )( )
( )
( )( )
( ) ( )( )
∣ ∣ ( )
( ) ( )
( ) ( )
Lemma 3.3. The matrix *= - +M M Mn n n1
2ˆ ( ) is positive definite for sufficiently large n∣ ∣.
Proof. A simple calculation yields
⎡
⎣⎢⎢
⎤
⎦⎥⎥=M
M M
M M,n
n n
n n11 11
21 11
ˆˆ ˆ
ˆ ˆ
( ) ( )
( ) ( )
where
⎡⎣⎢
⎤⎦⎥
⎡⎣⎢
⎤⎦⎥
⎡⎣⎢
⎤⎦⎥
⎡⎣⎢
⎤⎦⎥
m l ml m
m l ml m
m l ml m
m l ml m
=++
+ = -++
+
=++
+ =++
+
MR
n O MR
n O
MR
n O MR
n O
2 2
31 , i
31 ,
i3
1 ,2 2
31 .
n n
n n
11 12
21 22
ˆ ( )( )
∣ ∣ ( ) ˆ ( )( )
( )
ˆ ( )( )
( ) ˆ ( )( )
∣ ∣ ( )
( ) ( )
( ) ( )
For sufficiently large n∣ ∣, we have >M 0n
11ˆ ( )
and
m l m l ml m
=+ - +
++ >M
Rn O ndet
4 2
30,n
2 2 2
22( ˆ ) [ ( ) ( ) ]
[ ( )]∣ ∣ (∣ ∣)
which completes the proof by applying Sylvester’s criterion. ,
Lemma 3.4. The boundary operator T ¶ ¶-H B H B: 1 2 2 1 2 2( ) ( ) is continuous, i.e.,
T " Î ¶- ¶ ¶ u u u H B, .B B1 2, 1 2,1 2 2( )
Proof. It follows from (3.12) and the asymptotic expansions of Mijn( ) that
T
å
å
= +
+ =
- ¶Î
-
ζ
u u
u u
n M R
n R
1
1 ,
Bn
nn
n
nB
1 2,2 2 1 2 2
2 1 2 21 2,2
( ) ∣ ( )∣
( ) ∣ ( )∣
( )
( )
which completes the proof. ,
3.2. Uniqueness
It follows from the Dirichlet boundary condition (2.6) and the Helmholtz decomposition (2.8)that
f f= + = - ¶v u Dcurl on .1 2inc
Inverse Problems 32 (2016) 115018 P Li et al
8

Taking the dot product of the above equation with n and t , respectively, we have
f f f f¶ - ¶ = ¶ + ¶ =n t n tu v, ,1 2 2 1
where
n t= - = -u uu v, .inc inc· ·
Using the transparent boundary conditions (3.4), we obtain a coupled boundary valueproblem for the scalar potentials fj:
T
⎧
⎨⎪⎪
⎩⎪⎪
f k f
f ff ff f
D + = W
¶ - ¶ = ¶¶ + ¶ = ¶¶ - = ¶
n t
n t
r
u D
v D
B
0 in ,
on ,
on ,
0 on .
3.13
j j j
j j j
2
1 2
2 1
( )
The weak formulation of (3.13) is to find f f Î WH,1 21 2( ) ( ) such that
f f y y y y y y= + " Î W¶ ¶a u v H, ; , , , , , , 3.14D D1 2 1 2 1 2 1 21 2( ) ⟨ ⟩ ⟨ ⟩ ( ) ( ) ( )
where the sesquilinear form W ´ W a H H: 1 2 1 2( ) ( ) is defined by
T T
f f y y f y f y k f y k f yf y f y f y f y
= + - -- ¶ + ¶ - -t t¶ ¶ ¶ ¶
a , ; , , , , ,
, , , , .D D B B
1 2 1 2 1 1 2 2 12
1 1 22
2 2
2 1 1 2 1 1 1 2 2 2
( ) ( ) ( ) ( ) ( )⟨ ⟩ ⟨ ⟩ ⟨ ⟩ ⟨ ⟩
Theorem 3.5. The variational problem (3.14) has at most one solution.
Proof. It suffices to show that f = 0j in Ω if = =u v 0. If f f,1 2( ) satisfy the homogeneousvariational problem (3.14), then we have
T T
f f f f k f f k f ff f f f f f f f
+ - -- ¶ + ¶ - - =t t¶ ¶ ¶ ¶
, , , ,
, , , , 0. 3.15D D B B
1 1 2 2 12
1 1 22
2 2
2 1 1 2 1 1 1 2 2 2
( ) ( ) ( ) ( )⟨ ⟩ ⟨ ⟩ ⟨ ⟩ ⟨ ⟩ ( )
Noting f f f f¶ = - ¶t t¶ ¶, ,D D1 2 1 2⟨ ⟩ ⟨ ⟩ , we get
f f f f f f¶ - ¶ = - ¶t t t¶ ¶ ¶, , 2 Re , . 3.16D D D1 2 2 1 2 1⟨ ⟩ ⟨ ⟩ ⟨ ⟩ ( )
Taking the imaginary part of (3.15) and using (3.16), we obtain
T Tf f f f+ =¶ ¶Im , Im , 0,B B1 1 1 2 2 2⟨ ⟩ ⟨ ⟩
which gives f = În0,jn( ) , due to lemma 3.1. Thus we have f = 0j and f¶ =r 0j on ¶B.
By the Holmgren uniqueness theorem, we have f = 0j in B2⧹ ¯. A unique continuation resultconcludes that f = 0j in Ω. ,
3.3. Well-posedness
Using the transparent boundary condition (3.12), we obtain a boundary value problem for thedisplacement of the total wave u:
Inverse Problems 32 (2016) 115018 P Li et al
9

B T
⎧⎨⎪⎩⎪m l m wD + + + = W= ¶= + ¶
u u uu
u u gDB
0 in ,0 on ,
on ,
3.17
2( ) ·( )
where B T= -g uinc( ) . The variational problem of (3.17) is to find Î W¶u H D1 2( )
such that
= " Î W¶u v v vb g H, , , 3.18D1 2( ) ( ) ( ) ( )
where the sesquilinear form W ´ W ¶ ¶b H H: D D1 2 1 2( ) ( ) is defined by
T
ò òò
m l m
w
= + +
- -
W W
W¶
u v u v x u v x
u v x u v
b , : d d
d , B2
( ) ¯ ( ) ( · )( · ¯)
· ¯ ⟨ ⟩
and the linear functional W ¶g H: D1 2( ) is defined by
= ¶v g vg , .B( ) ⟨ ⟩
Here =A B AB: tr( ) is the Frobenius inner product of square matrices A B, .It follows from the standard trace theorem of the Sobolev spaces that we have
Lemma 3.6. It holds the estimate
" Î W¶ W ¶ u u u H, .B D1 2, 1,1 2( )
Lemma 3.7. For any e > 0, there exists a positive constant eC ( ) such that
e e+ " Î W¶ W W ¶ u u u uC H, .B D0, 1, 0,1 2( ) ( )
Proof. Let u be the zero extension of u as defined in lemma 3.6. For any given e > 0, itfollows from Young’s inequality that
ò ò
ò ò
rr r r
rr r
e r r er
r r
=
¢ + ¢
¢ ¢
-
¢ ¢
u u u u
u u
R
R R
d
dd 2
d
dd
dd
dd ,
n
R
Rn
R
Rn n
R
Rn
R
Rn
2 2
2 1 2 22
∣ ˜ ( )∣ ∣ ˜ ( )∣ ∣ ˜ ( )∣ ˜ ( )
( ) ∣ ˜ ( )∣ ( ) ˜ ( )
( ) ( ) ( ) ( )
( ) ( )
which gives
ò òe r r r er
r r r+¢ ¢
u u uR C dd
dd .n
R
Rn
R
Rn2 2 2
2
∣ ˜ ( )∣ ( ) ∣ ˜ ( )∣ ˜ ( )( ) ( ) ( )
The proof is completed by noting that = =¶ ¶ W W u u u u,B B0, 0, 0, 0,˜ ˜ , and=W W u u1, 1,˜ . ,
Inverse Problems 32 (2016) 115018 P Li et al
10

Lemma 3.8. It holds the estimate
" Î WW W ¶ u u u H, .D1, 0,1 2( )
Proof. Let u be the zero extension of u as defined in lemma 3.6. It follows from theCauchy–Schwarz inequality that
ò òr r r= ¶ ¶r
r r¢ ¢
u u ud d .R R
R2
22∣ ˜( )∣ ˜ ∣ ˜ ∣
Hence we have
ò ò ò ò ò
ò ò
r q r r q r
r q
= ¶
¶
p pr
pr
W ¢ ¢ ¢
¢ W
u u u
u u
d d d d d
d d .
R
R
R
R
R
R
R
R
0,2
0
22
0
22
0
22
0,2
˜ ∣ ˜∣ ∣ ˜∣
∣ ˜∣ ˜
˜
˜
It is easy to note that
= = = + W W W W W W W u u u u u u u, , ,0, 0, 0, 0, 1,2
0,2
0,2˜ ˜˜ ˜
which completes the proof. ,
Theorem 3.9. The linear functional g is bounded in W¶H D1 2( ) .
Proof. It is only needed to show that g is bounded in W¶H D1 2( ) for the compressional plane
wave (2.2) since the proof is similar for the shear plane wave (2.3). In the polar coordinates,we have
q j q j= = - - -k k r q j-u de e cos , sin . 3.19x dinc i i cos1 1 ( ( ) ( )) ( )· ( )
Following the Jacobi–Anger expansion
å k r=k r q j q j-
Î
-Je i e , 3.20n
nn
ni cos1
i1 ( ) ( )( ) ( )
we get
å
å
q j
k r k r
k r
- = +
= -
= ¢
k r q j k r q j q j q j
q j
j q
- - - - -
Î
-
- +-
Î
- -
J J
J
e cos1
2e e e
i
2e
i e e
3.21n
n
n nn
n
nn
n n
i cos i cos i i
1
1 1 1 1i
11
i i
1 1( ) ( )
( ( ) ( ))
( )
( )
( ) ( ) ( ) ( )
( )
and
⎛⎝⎜
⎞⎠⎟
å
å
q j
k r k r
k rk r
- = -
= - +
= -
k r q j k r q j q j q j
q j
j q
- - - - -
Î- +
-
Î
-
J J
nJ
e sin1
2ie e e
i
2e
i e e .
3.22n
n
n nn
n
nn
n n
i cos i cos i i
1 1 1 1i
11
i i
1 1( ) ( )
( ( ) ( ))
( )
( )
( ) ( ) ( ) ( )
( )
Inverse Problems 32 (2016) 115018 P Li et al
11

Substituting (3.21) and (3.22) into (3.19) yields
⎛⎝⎜
⎛⎝⎜
⎞⎠⎟
⎞⎠⎟
kk
k= ¢ -j- -u R J Rn
RJ Re i , i .n n n
nn
ninc i 1
11
1( ) ( ) ( ) ( )( )
It is easy to verify from (3.12) that T < ¥- ¶ u Binc
1 2, .On the other hand, a simple calculation yields
B
m l m
k l m m q j m q j q j
= ¶ + +
= + + - - - -r r
k q j-
u u u e
i e cos , cos sin .
3.23
R
inc inc inc
1i cos 21
( )( · )(( ) ( ) ( ) ( ))
( )
( )
Substituting (3.20)–(3.22) into (3.23), we may also verify that B < ¥- ¶ u Binc
1 2, . Hence< ¥- ¶ g B1 2, . It follows from lemma 3.6 that
= " Î W¶ - ¶ ¶ W ¶ v g v g v v vg H, , ,B B B D1 2, 1 2, 1,1 2∣ ( )∣ ∣⟨ ⟩ ∣ ( )
which completes the proof. ,
Theorem 3.10. The variational problems admits a unique weak solution Î W¶u H D1 2( ) .
Proof. Using the Cauchy–Schwarz inequality, lemma 3.4, and lemma 3.6, we have
T
m l m w + + ++
W W W W W W
- ¶ ¶
W W
u v u v u v u v
u v
u v
b ,
,B B
0, 0, 0, 0,2
0, 0,
1 2, 1 2,
1, 1,
∣ ( )∣ ( ) · ·
which shows that the sesquilinear form b ,(· ·) is bounded.It follows from lemma 3.3 that there exists an ÎN0 such that Mn
ˆ is positive definite for>n N0∣ ∣ . The sesquilinear form b can be written as
ò ò
ò
å
å
m l m
w
= + + -
- -
W W >
W
u v u v x u v x u v
u v x u v
b M
M
, : d d ,
d , .
n Nn
n n
n Nn
n n2
0
0
( ) ( ¯) ( ) ( · )( · ¯) ⟨ ⟩
· ¯ ⟨ ⟩
∣ ∣
( ) ( )
∣ ∣
( ) ( )
Taking the real part of b, and using lemma 3.3, 3.8, 3.7, we obtain
å
å
m l m
w
ww e e
e
= + + +
- +
- -
- - -= - -
W W>
W
W W ¶
W W W W
W W
u u u u u u
u u u
u u u
u u u u
u u
b M
M
C C
C C C
C C C
Re , ,
,
.
n Nn
n n
n Nn
n n
B
0,2
0,2
20,
1 1,2
0, 2 0,
1 1,2
0, 2 1, 0,
1 2 1, 3 0,
0
0
( ) ( ) · ⟨ ˆ ⟩
⟨ ˆ ⟩
( )( )
∣ ∣
( ) ( )
∣ ∣
( ) ( )
Letting e > 0 to be sufficiently small, we have e- >C C 01 2 and thus Gårding’sinequality. Since the injection of W¶H D
1 2( ) into WL2 2( ) is compact, the proof is completed byusing the Fredholm alternative (see [28, theorem 5.4.5]) and the uniqueness result intheorem 3.5. ,
Inverse Problems 32 (2016) 115018 P Li et al
12

4. Inverse scattering
In this section, we study the domain derivative and propose a continuation method for theinverse scattering problem.
4.1. Domain derivative
Given >h 0, introduce a domain Wh bounded by ¶Dh and ¶B, where
¶ = + Î ¶x p x xD h D: ,h { ( ) }
where the obstacle’s surface ¶D is assumed to be in C2 and the function Î ¶p C D2 ( ). It isclear to note that ¶ ÎD Ch
2 is a perturbation of ¶D for sufficiently small h.Consider the variational problem in the perturbed domain Wh: Find Î W¶u Hh D h
1 2h( ) such
that
= " Î W¶ ¶u v g v vb H, , , , 4.1hh h h B h D h
1 2h
( ) ⟨ ⟩ ( ) ( )
where the sesquilinear form W ´ W ¶ ¶b H H:hD h D h
1 2 1 2h h( ) ( ) is defined by
T
ò ò
ò
m l m
w
= + +
- -
W W
W¶
u v u v y u v y
u v y u v
b , : d d
d , . 4.2
hh h h h h h
h h h h B2
h h
h
( ) ¯ ( ) ( · )( · ¯ )
· ¯ ⟨ ⟩ ( )
We may repeat the proofs in section 3 to show that the variational problem (4.1) has a uniqueweak solution Î W¶u Hh D h
1 2h( ) for any h.
Define a nonlinear scattering operator:
S g¶ uD: ,h h
where γ is the trace operator onto ¶B. The domain derivative of the operator S on theboundary ¶D along with the direction p is defined by
SS S g g
¢ ¶¶ - ¶
=-
p
u uD
D D
h h; lim lim .
h
h
h
h
0 0( ) ≔ ( ) ( )
For a given Î ¶p C D2 ( ), we extend its domain to W by requiring thatÇÎ W W =p pC C , 02 ( ) ( ¯ ) on ¶B, and x= = +y x x p xhh ( ) ( ) maps Ω to Wh. It is clear to
note that xh is a diffeomorphism from Ω to Wh for sufficiently small h. Denote byh W Wy :h
h( ) the inverse map of xh.Define x= u x u xu u, h
h1 2( ) ( ) ≔ ( ◦ )( ). It follows from the change of variable x=y xh ( )
that we have
ò ò
ò ò
ò ò
å =
=
=
h h x
h h x
x
W = W
W W
W W
u v y x
u v y u v x
u v y u v x
u J J v J
J J J
J
: d det d ,
d : : det d ,
d det d ,
h hj
j j
h h
h h
1
2
h
h h h
h
h h h
h
h
( ¯ ) ¯ ( )
( · )( · ¯ ) ( )( ¯ ) ( )
· ¯ · ¯ ( )
where x= v x v xv v, hh
1 2( ) ( ) ≔ ( ◦ )( ), hJ h and xJ h are the Jacobian matrices of the transformshh and xh, respectively.
Inverse Problems 32 (2016) 115018 P Li et al
13

For an arbitrary test function vh in the domainWh, it is easy to note that v is a test functionin the domain Ω according to the transform. Therefore, the sesquilinear form bh in (4.2)becomes
T
ò ò
ò
åm l m
w
= + +
´ - -
h h x h
h x x
= W W
W¶
u v x u
v x u v x u v
b u J J v J J
J J J
, det d :
: det d det d , ,
h
jj j
B
1
2
2
h h h h
h h h
( ) ¯ ( ) ( ) ( )
( ¯ ) ( ) · ¯ ( ) ⟨ ⟩
which gives an equivalent variational formulation to (4.1):
= " Î W¶ ¶u v g v vb H, , , . 4.3hB D
1 2( ) ⟨ ⟩ ( ) ( )
A simple calculation yields
- = - = - = + +¶ u u v u v g v u v u vb b b b b b b, , , , , ,Bh
1 2 3( ) ( ) ⟨ ⟩ ( ) ( )
where
òåm= - h h x= W
xb u I J J J vdet d , 4.4j
j j11
2h h h( ( )) ¯ ( )
òl m= + - h h x
W u v u v xb J J J: : det d , 4.52 h h h( ) ( · )( · ¯) ( )( ¯ ) ( ) ( )
òw= -xWu v xb Jdet 1 d . 4.63
2 h· ¯ ( ( ) ) ( )
Here I is the identity matrix. Following the definitions of the Jacobian matrices, we may easilyverify that
h
= + +
= = - +
= - + + +
x
h x
h h x
-
p
p
J h O h
J J I hJ O h
J J J I h J J h I O h
det 1 ,
,
det ,
p
p p
h
2
1 2
2
h
h h
h h h
( ) · ( )◦ ( )
( ) ( ) ( · ) ( )
where the matrix = pJp . Substituting the above estimates into (4.4)–(4.6), we obtain
ò
ò
ò
åm
l m
w
= + - +
= + +
- +
= +
= W
W
W
p x
u v v u
p u v x
u v p x
b u h J J h I O h v
b h J h J
h O h
b h O h
d ,
: :
d ,
d .
p p
p p
jj j1
1
22
2
2
32 2
( ( ) ( · ) ( )) ¯
( ) ( · )( ¯ ) ( · ¯)( )
( · )( · )( · ¯) ( )
· ¯ ( · ( ))
Hence we have
⎜ ⎟⎛⎝
⎞⎠
-= + + +
u uv p u v p u v p u vb
hg g g O h, , , , , 4.71 2 3( )( ) ( )( ) ( )( ) ( ) ( )
Inverse Problems 32 (2016) 115018 P Li et al
14

where
ò
òò
åm
l m
w
= + -
= + + -
=
= W
W
W
p x
u v v u p u v x
p u v x
g u J J I v
g J J
g
d ,
: : d ,
d .
p p
p p
jj j1
1
2
2
32
(( ) ( · ) ) ¯
( ) ( · )( ¯ ) ( · ¯)( ) ( · )( · )( · ¯)
( · ) · ¯
Theorem 4.1. Let u be the solution of the variational problem (3.18). Given Î ¶p C D2 ( ),the domain derivative of the scattering operator S is S g¢ ¶ = ¢p uD;( ) , where ¢u is theunique weak solution of the boundary value problem:
B T
⎧⎨⎪⎩⎪
nm l m wD ¢ + + ¢ + ¢ = W¢ = - ¶ ¶¢ = ¢ ¶
n
u u uu p u
u uD
B
0 in ,
on ,
on .
4.8
2( ) ·( · ) ( )
Proof. Given Î ¶p C D2 ( ), we extend it to W as before. It follows from the well-posednessof the variational problem (3.18) that u u in W¶H D
1 2( ) as h 0. Taking the limit h 0 in(4.7) gives
⎜ ⎟⎛⎝
⎞⎠
-= + +
u uv p u v p u v p u vb
hg g glim , , , , , 4.9
h 01 2 3( )( ) ( )( ) ( )( ) ( )
which shows that -u u h( ) is convergent in W¶H D1 2( ) as h 0. Denote by u this limit and
rewrite (4.9) as
= + +u v p u v p u v p u vb g g g, , , , . 4.101 2 3( ˙ ) ( )( ) ( )( ) ( )( ) ( )
First we compute p u vg ,1( )( ). Noting =p 0 on ¶B and using the identity
+ - = + -
- D - D
p p p p
p p
u J J I v u v v u u v
u v v u,p p(( ) ( · ) ) ¯ · [( · ) ¯ ( · ¯) ( · ¯) ]
( · ) ¯ ( · ¯)
we obtain from the divergence theorem that
ò
ò
òò
å
å n n n
n n n
m
m
m
m
= - D + D
- + -
= - D + D
- + -
= W
= ¶
W
¶
p u v p p x
p p p
p u v p v u x
p u v p v u p u v
g u v v u
u v v u u v s
s
, d
d
d
: d .
jj j j j
j Dj j j j j j
D
11
2
1
2
( )( ) ( · ) ¯ ( · ¯ )
( · )( · ¯ ) ( · ¯ )( · ) ( · )( · ¯ )
( · ) · ¯ ( · ¯) ·
( · ) · ( · ¯) ( · ¯) · ( · ) ( · )( ¯)
Inverse Problems 32 (2016) 115018 P Li et al
15

Since m l m wD + + + =u u u 02( ) · in Ω, we have from the integration by parts that
ò ò òòò
ò
n
m l m w
l m
l m
w
D =- + -
= +
+ +
-
W W W
W
¶
W
p v u x p v u x p v u x
u p v x
u p v
p v u x
s
d d d
d
d
d .
D
2
2
( · ¯) · ( ) ( · ¯) · ( · ) ( · ¯) ·
( ) ( · ) · ( · ¯)
( ) ( · )( · ( · ¯))
( · ¯) ·
Using the integration by parts again yields
ò ò ò nm m m D = - - W W ¶
p u v x p u v x p u v sd : d d .D
( · ) · ¯ ( · ) ¯ ( · ) · ( · ¯)
Recall that =v 0 on ¶D. We have ¶ =tv 0, which implies that
n n n n¶ = ¶ ¶ = ¶v v v v, . 4.11x x x x2 1 1 1 2 2 1 21 2 1 2( )
Using (4.11), we can verify that
ò n n - =¶
p v u p u v s: d 0.D
( · ¯) · ( · ) ( · )( ¯)
Noting =v 0 on ¶D and
+ = - p u v p v u u v p p u v,( · )( · ¯) ( · ¯) · · (( · ¯) ) ( · ) · ¯
we obtain by the divergence theorem that
ò ò + = - W W
p u v p v u x p u v xd d .( · )( · ¯) ( · ¯) · ( · ) · ¯
Combining the above identities, we conclude that
òò
ò ò n
m
l m
w l m
+ =
- +
- + +
W
W
W ¶
p u v p u v p u v x
u p v x
p u v x u p v
g g
s
, , : d
d
d d . 4.12D
1 3
2
( )( ) ( )( ) ( · ) ¯
( ) ( · ) · ( · ¯)
( · ) · ¯ ( ) ( · )( · ( · ¯)) ( )
Next we compute p u vg ,2 ( )( ). It is easy to verify that
ò òò òò
+ =
- +
-
W W
W W
W
u v v u x u p v x
u p v x v p u x
v p u x
J J: : d d
d d
d .
p p( · )( ¯ ) ( · ¯)( ) ( · ) · ( · ¯)
( · )( · ( · ( ¯) )) ( · ¯) · ( · )
( · ¯)( · ( · ( ) ))
Inverse Problems 32 (2016) 115018 P Li et al
16

Using the integration by parts, we obtain
ò òòòòò
n
n
=-
-
=-
-
-
W W
¶
W
W
¶
p u v x p u v x
u v p
v p u x
u p v x
u v p
s
s
d d
d
d
d
d .
D
D
( · )( · )( · ¯) · (( · )( · ¯))
( · )( · ¯)( · )
( · ¯)( · ( · ( ) ))
( · )( · ( · ( ¯) ))
( · )( · ¯)( · )
Using (4.11) again, we get
ò òn n = ¶ ¶
u v p u p vs sd d .D D
( · )( · ¯)( · ) ( · )( · ( · ¯))
Combining the above identities gives
ò òò n
l m l m
l m
= + + +
- +
W W
¶
p u v u p v x p u v x
u p v
g
s
, d d
d . 4.13D
2 ( )( ) ( ) ( · ) · ( · ¯) ( ) · ( · )( · ¯)
( ) ( · )( · ( · ¯)) ( )
Noting (4.10), and adding (4.12) and (4.13), we obtain
òò ò
m l m
w
= + +
-
W
W W
u v p u v x
p u v x p u v x
b , : d
d d .2
( ˙ ) ( · ) ¯ ( )
· ( · )( · ¯) ( · ) · ¯
Define ¢ = - u u p u˙ · . It is clear to note that =p u 0· on ¶B since =p 0 on ¶B.Hence, we have
¢ = " Î W¶u v vb H, 0, , 4.14D1 2( ) ( ) ( )
which shows that ¢u is the weak solution of the boundary value problem (4.8). To verify thatboundary condition of ¢u on ¶B, we recall the definition of ¢u and have
¢ =-
- = - ¶
u
u up u p u
hDlim on ,
h 0· ·
since = =u u 0 on ¶D. Noting =u 0 and thus ¶ =tu 0 on ¶D, we have
n t n = ¶ + ¶ = ¶n t np u p u p u p u, 4.15· ( · ) ( · ) ( · ) ( )which completes the proof by combining (4.14) and (4.15). ,
4.2. Reconstruction method
As a closed curve, the obstacle’s surface has a parametric equation
p¶ = Î = Îr rD t r t r t t: , , 0, 2 ,21 2{ ( ) ( ( ) ( )) [ ]}
where r r,1 2 are twice continuously differentiable and p2 -periodic functions and they can berepresented as Fourier series
Inverse Problems 32 (2016) 115018 P Li et al
17

å= + +=
¥-r t r r nt r ntcos sin .j j
nj
nj
n0
1
2 1 2( ) ( ( ) ( ))( ) ( ) ( )
To reconstruct the surface, it suffices to determine the Fourier coefficients rjn( ). In practice, a
cut-off approximation will be taken
å= + +=
-r t r r nt r ntcos sin .j N jn
N
jn
jn
,0
1
2 1 2( ) ( ( ) ( ))( ) ( ) ( )
For large N, rj N, differ from rj in high frequency modes which represent small details of theobstacle’s surface.
Denote by DN the obstacle with boundary ¶DN , which has a parametric form
p¶ = Î = Îr rD t t r t r t t: , , 0, 2 .N N N N N2
1, 2,{ ( ) ( ) ( ( ) ( )) [ ]}
Let W = B DN N⧹ ¯ . Denote a vector of Fourier coefficients = ¼ Î++c c cC , , , N
N1 2 4 2
4 2( ) ,where = = = ¼+ +c r c r n N, , 0, 1, ,2n
nn
n2 1 1 2 2 2
( ) ( ) , and a vector of scattering data = ¼ Îu x u x u xU , , , M
M1 2
2( ( ) ( ) ( )) , where Î ¶x Bm , = ¼m M1, , . The inverse problemcan be formulated to solve an approximate nonlinear equation
F =C U,N ( )where the operator FN maps a vector in +N4 2 into another vector in M2 .
Theorem 4.2. Let uN be the solution of the variational problem (3.18) with the obstacle DN .The operator FN is differentiable and its derivatives are given by
F¶¶
= ¢ = ¼ + = ¼u xc
n N m MC
, 1, , 4 2, 1, , ,N m
nn m
, ( )( )
where ¢un is the unique weak solution of the boundary value problem
B T
⎧⎨⎪
⎩⎪m l m w
pD ¢ + + ¢ + ¢ = W¢ = ¶ ΢ = ¢ ¶
n
u u u
u r u r
u u
t q t t t
B
0 in ,
for 0, 2 ,
on .
4.16n n n N
n N n N N
n n
2( ) ·( ( )) ( )( ( ( ))) [ ] ( )
Here
=¢
¢ + ¢= -
¢
¢ + ¢q t
r t
r t r tq t
r t
r t r t,N
N N
N
N N1
2,
1,2
2,2 2
1,
1,2
2,2
( )( )
( ( )) ( ( ))( )
( )
( ( )) ( ( ))
and
⎧⎨⎪⎪
⎩⎪⎪
=
= -== += +
q t
q t jt n j
q t jt n j
q t jt n j
q t jt n j
cos , 4 1,
cos , 4 ,
sin , 4 1,
sin , 4 2,
n
1
2
1
2
( )
( ) ( )( ) ( )( ) ( )( ) ( )
for = ¼j N1, , .
Inverse Problems 32 (2016) 115018 P Li et al
18

Proof. Let n n n= ,1 2( ) be the unit outward norm on ¶DN . Explicitly, we have
n n= -¢
¢ + ¢=
¢
¢ + ¢
r t
r t r t
r t
r t r t, .N
N N
N
N N
12,
1,2
2,2
21,
1,2
2,2
( )
( ( )) ( ( ))
( )
( ( )) ( ( ))
Fix Î ¼ +n N1, ,4 2{ } and Î ¼m M1, ,{ }, and let ¼ +e e, , N1 4 2{ } be the set of natural basisvectors in +N4 2. By definition, we have
F F F¶¶
=+ -
c
h C
h
C C elim .N m
n h
N m n N m,
0
, ,( ) ( ) ( )
A direct application of theorem 4.1 shows that the above limit exists and is the unique weaksolution of the boundary value problem (4.16). ,
Consider an objective function
F Få= - = -=
u xf UC C C1
2
1
2.N
m
M
N m m2
1,
2( ) ( ) ∣ ( ) ( )∣
The inverse problem can be formulated as the minimization problem:
Î +f C Cmin , .N
C
4 2( )
To apply the descent method, it is necessary to compute the gradient of the objective function.Using theorem 4.2, we have from a simple calculation that
⎛⎝⎜
⎞⎠⎟
=¶¶
¼¶ +
ff
c
f
cC
C C, , ,
N1 4 2( ) ( ) ( )
where
F嶶
= ¢ -=
u x u xf
cC
CRe .
n m
M
n m N m m1
,( ) ( ) · ( ¯ ( ) ¯ ( ))
We assume that the scattering data U is available over a range of frequenciesw w wÎ ,min max[ ], which may be divided into w w w w w= < < < = Kmin 0 1 max . Corre-spondingly, the compressional wavenumber may be divided into k k= <1,min 1,0
k k k< < = K1,1 1, 1,max and the shear wavenumber may be divided into k =2,min
k k k k< < < = K2,0 2,1 2, 2,max . Let k=ki i1,[ ] or k= = ¼k i K, 0, 1, ,i i2,[ ] be thegreatest integer less than or equal tok i1, ork i2, . We now propose an algorithm to reconstruct theFourier coefficients = ¼ +c n N, 1, , 4 2n .
(1) Set an initial approximation = = >c c R 03 6 0 and cn = 0 otherwise, i.e., the initialapproximation is a circle with radius R0.
(2) Begin with the smallest frequency w0, and seek an approximation to the functions rj N, byFourier series with Fourier modes not exceeding k0:
å= + +=
-r r r nt r ntcos sin .j k jn
k
jn
jn
,0
1
2 1 20
0
( ( ) ( ))( ) ( ) ( )
Denote = ¼ +c c cC , , ,k k1 2 2 20 0( ) and consider the iteration
e= - = ¼+ f C l LC C , 1, , ,kl
kl
kl1
0 0 0( )( ) ( ) ( )
Inverse Problems 32 (2016) 115018 P Li et al
19

where e > 0 and >L 0 are the step size and the total number of iterations for the descentmethod, respectively.
(3) Increase to the next higher frequency w1 of the available data. Repeat Step 2 with theprevious approximation to rj N, as the starting point. More precisely, approximate rj N, by
å= + +=
-r r r nt r ntcos sinj k jn
k
jn
jn
,0
1
2 1 21
1
˜ ( ˜ ( ) ˜ ( ))( ) ( ) ( )
and determine the coefficients = ¼ +c n k, 1, 2, ,2 2n 1˜ by using the descent methodstarting from the previous result:
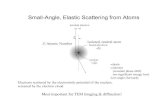
Figure 1. example 1: the kite-shaped obstacle. (a) exact surface and initial guess of the
unit circle; (b) y pÎ 0, 2 ;[ ] (c) ⎡⎣ ⎤⎦y Î p0, ;32
(d) ⎡⎣ ⎤⎦ Èy p pÎ p0, , 2 ;2
[ ] (e)
⎡⎣ ⎤⎦ ⎡⎣ ⎤⎦Èy pÎ p p0, , 2 ;2
32
(f) y pÎ 0, ;[ ] (g) ⎡⎣ ⎤⎦y Î p p, ;2
32
(h) ⎡⎣ ⎤⎦y Î Èp0,4
⎡⎣ ⎤⎦pp , 2 ;74
(i) ⎡⎣ ⎤⎦y Î p p,34
54
.
Inverse Problems 32 (2016) 115018 P Li et al
20

⎧⎨⎩
=+
+ < +c
c n kk n k
for 1 2 2,0 for 2 2 2 2,n
n 0
0 1˜
where the coefficients cn come from Step 2. The resulting solution in this step representsthe Fourier coefficients of rj N, corresponding to the frequencies not exceeding k1.
(4) Repeat Step 3 until a prescribed highest frequency wK is reached.
We need to choose the prescribed frequency larger than the highest Fourier mode of thesurface in order to get a complete reconstruction.
5. Numerical experiments
In this section, we present two representative examples to show the results of the proposedmethod. The scattering data is obtained from solving the direct problem by using the finiteelement method with the perfectly matched layer technique, which is implemented viaFreeFem++ [13]. The finite element solution is interpolated uniformly on ¶B. To test thestability, we add an amount of relative noise to the data
d= + = ¼du x u x i M1 rand , 1, , ,i i( ) ( )( )
where rand are uniformly distributed random numbers in -1, 1[ ]. Since the measurementpoints Î ¶x Bi , we have y y=x R Rcos , sini i i( ) , where y pÎ 0, 2i [ ] is the observationangle.
In the following two examples, we take the Lamé constants l m= =2, 1, whichaccount for the compressional wavenumber k w= 21 and the shear wavenumber k w=2 .The radius of the ball B is R = 2.5 and the radius of the initial guess of the circle R0 = 1.0.The noise level d = 5%. The step size is e = = ¼k i K0.005 , 0, 1, ,i . The total number ofiterations and measurement points are L = 10 and M = 64, respectively.
Example 1. Consider a commonly used benchmark test example, a kite-shaped obstacle,which has the parametric equation
p= - + + = Îr t t t r t t t0.65 cos 0.65 cos 2 , 1.5 sin , 0, 2 .1 2( ) ( ) ( ) ( ) ( ) [ ]
The obstacle is non-convex. It has become a criterion to judge the quality of a reconstructionmethod whether the concave part of the obstacle can be successfully recovered. Our approachis essentially a Fourier spectral method and aims to recover the Fourier coefficients. Since thesurface only contains a couple of low Fourier modes, it is expected that our method worksvery well even by using few scattering data. We use only a single compressional plane wavewith the incident angle j = 0 to illuminate the obstacle. We take the scattering data at twofrequencies w = 20 and w = 41 , i.e., the compressional wavenumbers are k k= =1, 21,0 1,1 .We have = = =k k K1, 2, 20 1 . Figure 1(a) shows the exact surface and the initial guess ofthe unit circle. Figure 1(b) shows the reconstructed surface by using the full aperture data, i.e.,the observation angle y pÎ 0, 2[ ]. The result is almost perfect. We also investigate how thedata aperture influences the quality of the reconstruction. Figures 1(c)–(i) plot thereconstructed surfaces and the corresponding data apertures for the construction. It is clearto note that the results are as good as the one by using the full aperture data as long as theobservation angles cover the concave part of the obstacle; the results deteriorate as theaperture gets smaller if the observation angles do not cover the concave part of the obstacle.
Inverse Problems 32 (2016) 115018 P Li et al
21

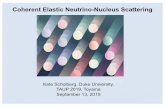
Example 2. Consider a star-shaped obstacle, which has the parametric equation
= + += - +
r t t t tr t t t t
1.5 cos 0.15 cos 4 0.15 cos 6 ,1.5 sin 0.15 sin 4 0.15 sin 6 ,
1
2
( ) ( ) ( ) ( )( ) ( ) ( ) ( )
where pÎt 0, 2[ ]. Due to the oscillatory feature, this surface contains many more highFourier modes and is more difficult than the first example. The scattering data with higherfrequencies is required to completely recover the obstacle. In this example, we use a singleshear plane wave with the incident angle j = 0 to illuminate the obstacle. We take thescattering data at three frequencies w w w= = =2, 4, 60 1 2 , i.e., the shear wavenumbers arek k k= = =2, 4, 62,0 2,1 2,3 . We have = = = =k k k K2, 4, 6, 30 1 2 . Figure 2(a) shows theexact surface and the initial guess of the unit circle. Figures 2(b)–(i) show the reconstructed
Figure 2. example 2: the star-shaped obstacle. (a) exact surface and initial guess of the
unit circle; (b) y pÎ 0, 2 ;[ ] (c) ⎡⎣ ⎤⎦y Î p p, ;4
74
(d) ⎡⎣ ⎤⎦ ⎡⎣ ⎤⎦Èy pÎ p p0, , 2 ;4
34
(e)
⎡⎣ ⎤⎦ ⎡⎣ ⎤⎦Èy pÎ p p0, , 2 ;34
54
(f) ⎡⎣ ⎤⎦ ⎡⎣ ⎤⎦Èy pÎ p p0, , 2 ;2
32
(g) y pÎ 0, ;[ ] (h)
⎡⎣ ⎤⎦y Î p p, ;2
32
(i) y p pÎ , 2[ ].
Inverse Problems 32 (2016) 115018 P Li et al
22

surfaces by using different data apertures. We obtain that the part of the surface can beaccurately reconstructed as long as it can be seen, i.e., the observation angles can coverthat part.
6. Concluding remarks
In this paper, we study the direct and inverse obstacle scattering problems for elastic waves intwo dimensions. We develop an exact transparent boundary condition and show that the directproblem has a unique weak solution. We examine the domain derivative of the total dis-placement with respect to the surface of the obstacle. We propose a continuation method infrequency for solving the inverse scattering problem. Numerical examples are presented todemonstrate the effectiveness of the proposed method. The results show that the method isstable and accurate to reconstruct surfaces with both full and limited aperture data.
We point out some current and future work. This paper considers rigid obstacles wherethe total displacement of the field vanishes on the surfaces. It is worthwhile to investigate thesurfaces for different boundary conditions. Clearly, modifications are needed for the trans-parent boundary conditions, the proofs of the direct problem, and the boundary conditions forthe domain derivatives. It is interesting to consider multiple obstacles where each obstacle’ssurface has a parametric equation. A challenging problem is to solve the three dimensionalproblem where a more efficient direct solver is needed for the large scale computation. Wehope to be able to address these issues and report the progress elsewhere in the future.
Acknowledgments
The research of PL was supported in part by the NSF grant DMS-1151308. The research ofYW was partially supported by the Startup grant from Hong Kong Baptist University, HongKong RGC General Research Fund 12328516 and NSFC grant 11601459. The research ofZW was supported in part by NSFC (Nos. 11161002, 11561003) and Ground Project ofScience and Technology of Jiangxi Universities (KJLD14051).
References
[1] Bao G, Li P, Lin J and Triki F 2015 Inverse scattering problems with multi-frequencies InverseProblems 31 093001
[2] Bao G, Li P and Wu H 2012 A computational inverse diffraction grating problem J. Opt. Soc. Am.A 29 394–9
[3] Bao G, Lv J and Li P 2013 Numerical solution of an inverse diffraction grating problem fromphaseless data J. Opt. Soc. Am. A 30 293–9
[4] Cakoni F and Colton D 2006 Qualitative Methods in Inverse Scattering Theory: An Introduction(Berlin: Springer)
[5] Charalambopoulos A 1995 On the Frechet differentiability of the boundary integral operators inthe inverse elastic scattering problems Inverse Problems 11 1137–61
[6] Coifman R, Goldberg M, Hrycak T, Israeli M and Rokhlin V 1999 An improved operatorexpansion algorithm for direct and inverse scattering computations Waves Random Media 9441–57
[7] Colton D and Kress R 1983 Integral Equation Methods in Scattering Theory (New York: Wiley)[8] Colton D and Kress R 1998 Inverse Acoustic and Electromagnetic Scattering Theory (Berlin:
Springer)[9] Ernst O G 1996 A finite-element capacitance matrix method for exterior Helmholtz problems
Numer. Math. 75 175–204
Inverse Problems 32 (2016) 115018 P Li et al
23

[10] Gächtera G K and Grote M J 2003 Dirichlet-to-Neumann map for three-dimensional elastic wavesWave Motion 37 293–311
[11] Haddar H and Kress R 2004 On the Fréchet derivative for obstacle scattering with an impedanceboundary condition SIAM J. Appl. Math. 65 194–208
[12] Hähner P and Hsiao G C 1993 Uniqueness theorems in inverse obstacle scattering of elastic wavesInverse Problems 9 525–34
[13] Hecht F 2012 New development in FreeFem++ J. Numer. Math. 20 251–65[14] Hu G, Li J, Liu H and Sun H 2014 Inverse elastic scattering for multiscale rigid bodies with a
single far-field pattern SIAM J. Imaging Sci. 7 1799–825[15] Hu G, Lu Y and Zhang B 2013 The factorization method for inverse elastic scattering from
periodic structures Inverse Problems 29 115005[16] Hu G, Kirsch A and Sini M 2013 Some inverse problems arising from elastic scattering by rigid
obstacles Inverse Problems 29 015009[17] Kar M and Sini M 2015 On the inverse elastic scattering by interfaces using one type of scattered
waves J. Elast. 118 15–38[18] Kirsch A 1993 The domain derivative and two applications in inverse scattering theory Inverse
Problems 9 81–96[19] Kirsch A and Grinberg N 2008 The Factorization Method for Inverse Problems (New York:
Oxford University Press)[20] Kress R 1996 Inverse elastic scattering from a crack Inverse Problems 12 667–84[21] Landau L D and Lifshitz E M 1986 Theory of Elasticity (Oxford: Pergamon)[22] Li P, Wang Y and Zhao Y 2015 Inverse elastic surface scattering with near-field data Inverse
Problems 31 035009[23] Le Louër F 2012 On the Fréchet derivative in elastic obstacle scattering SIAM J. Appl. Math. 72
1493–507[24] Le Louër F 2015 A domain derivative-based method for solving elastodynamic inverse obstacle
scattering problems Inverse Problems 31 115006[25] Luke C J and Martin P A 1995 Fluid–solid interaction: acoustic scattering by a smooth elastic
obstacle SIAM J. Appl. Math. 55 904–22[26] Monk P 2003 Finite Element Methods for Maxwells Equations (New York: Oxford University
Press)[27] Potthast R 1996 Domain derivatives in electromagnetic scattering Math. Meth. Appl. Sci. 19
1157–75[28] Nédélec J-C 2000 Acoustic and Electromagnetic Equations Integral Representations for
Harmonic Problems (Berlin: Springer)[29] Sini M and Thanh N T 2012 Inverse acoustic obstacle scattering problems using multifrequency
measurements Inverse Problems Imaging 6 749–73[30] Watson G N 1922 A Treatise on The Theory of Bessel Functions (Cambridge: Cambridge
University Press)
Inverse Problems 32 (2016) 115018 P Li et al
24