Introduction - Cherry Gregory Web viewSo, we adjustments we had made to the rod before adding the...
22
Team 4: Arcuten By: *Yami Hodges Cherry Gregory Cleon Hone Class: MEEN 1050-001 i
Transcript of Introduction - Cherry Gregory Web viewSo, we adjustments we had made to the rod before adding the...

Team 4: Arcuten
By: *Yami HodgesCherry Gregory
Cleon Hone
Class: MEEN 1050-001
i

December 12, 2011
Francis AfghanAssociate ProfessorScience Industry Building SI 231Salt Lake Community College
Dear Francis,
This is the letter concerning our project for the Mechanical Engineering Design and
Graphics class’s Final Project, known as the stair climber. A stair climber is a robot that is
designed to climb stairs with no assistance from humans to make it go except for a simple press
of a button. It needs to be complex enough to handle this task, yet simple enough to not
overcomplicate the task. Our stair climber is a designed to go forwards, backwards, and climb
stairs, on its own, with no human assistance beyond a flip of a switch. Since it is lightweight, it
can be carried anywhere.
It is a simple yet complex design that shows interesting thought process and some
amazing engineering skills
Thank you,Cherry Gregory*Yami HodgesCleon Hone
ii

Table of ContentsCover Sheet iTransmittal Letter iiTable of Contents iii
Introduction..................................................................................................................................1 Calculations 2 Results 5 Conclusion 6 Recommendations 7 References 8 Appendix A 9 Appendix B - Sketches 10 Figures 1 to 19
iii

Introduction
Our original specs (or specifications) for the project were quite simple and plainly stated
at the beginning of class. We needed to build a machine that would drive forward, stop, go
backwards, stop, then climb the a set of stairs, then stop at the top; all these steps with press of
a button. If we fail at making the machine do these things, we needed to at least make the
machine have a puff of smoke. It also cannot go so fast that we can’t catch it nor can it go so
slow it takes five minutes to go a foot.
The next thing we had to make sure of was the specification requirements. We were not
given any limitations on how big the thing was or how fast it needed to go. Yet, we wanted to
be sure that it was not so fast we could not catch it, or too big that we could not care it easily.
Another thing we had to be sure of was that it could go up the required stairs. We needed to
measure the stairs carefully and found that the top and bottom stair were slightly taller than
the rest of the stairs.
Our original brainstorming brought up three main ideas. The first was a The first was to
have six wheels and three engines attached to an arc that used a front-top set of wheels to pull
it up and then the rest of them drove it forward on the stairs. The second idea was for a tank
like machine. The tank machine idea was discarded for a lack of originality and we went with
the arc design. We have since had over four models with several modifications each. There
were over twenty changes total. However, the end result was something that was a challenge
to build and was amazingly unique.
1

Calculations
The first thing that we needed to calculate was how high the stairs were and how far the
machine would have to go vertically in order to get to the top of the stair case. The challenge
was with the first and the last stair, as they were a bit higher and shorter than the rest of the
stairs. This made it a slight challenge as the climber could get hung up on the first or last stair if
we build it to just to up the rest of the stairs. Our first brainstorming idea was a machine that
would use three legs in the front to walk the rest of the machine up the stairs (See Figures 1 to
6 in Appendix B). However, after hearing Francis say that the other teams that had tried that
and failed, we decided to discard that idea as it was very complicated and would need a lot of
tinkering. Then we considered the tank (see Figures 7-13) and arc design (see Figures 14-18).
We decided to go with the arc design instead of the tank design for several reasons. The
first reason was that it looked simple.
The second reason was that it was a
unique design that few people would
think of or try. The third reason was the
cost. Our budget was a huge constraint.
That is why most of our parts were salvaged or scrap parts that we took or altered to suit our
purposes.
After we decided on the design, we did several different sketching and ideation sessions
to get some ideas to work with. We made a two list of supplies, both the supplies we had and
the supplies we still needed to get. We also came up with a regular bi-weekly meeting schedule
so we could keep track of our progress and stay on task. The next few meetings were mostly
2

refinement of ideas and determining what supplies we still needed to purchase. We also
decided when to meet to have the supplies purchased and to build the, what would became,
the first of several designs.
On our first design, the calculations were off (See Fig. 17-18), as we were not sure what
they would need to be or how to measure the stair properly. After we cut out the frame and
mounted the wheels, we decided to take the project to the school and measure it against the
stairs. We cut it into pieces so we could fix it at the right length and angle with nails. The next
design was similar but still needed to have angle adjustment and to cut out part of the backend
so it could go up the top of the stairs.
We decided that the front top set of wheels was not needed. So we switched out with a
rod system to lift the machine’s front wheels above the edge of the stairs so it could just walk
forward. It did not work as well as we wanted. The first place we put the rod made it so it could
lever itself up above the stairs. The rod would lift it ¾th of the way, but it would not put the
wheels above the edge of the stairs. The next adjustment put the rod at over and up, which
just made it worse. After several more adjustments, we finally got it to lift properly. After
several attempts to adjust the back of the arc, we finally decided to add a tensioned hinge so
that the machine would automatically
readjust to compensate for the change in
angle needed.
We cut out a new model using the
old model as a guide, eliminating the hinge as we had found the correct angle. This was the
model that we decided to test. So we wired the motors to the battery pack and took the model
3

to the school to test it on the stairs. It drove forward and backwards just fine. However, when
we tried to have it go up the stairs, it could not lift itself up high enough. So, we adjustments we
had made to the rod before adding the motor paid off, as it let the machine lift up, but it was
not strong enough. The motors for the wheels did not have enough torque to pull the machine
forward and up when it was on the stairs.
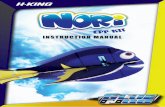
After several more adjustments, we determined that the
back half of the machine was not needed. It added a lot of
weight and did not pull the machine forward on the stairs like
we had intended it to do. So we decided to cut it off and add a
skid to the back. We got the idea from a sled. This would let the
machine go forwards and backwards and let it just glide over
the stairs without interfering with the front that was pulling the
machine vertically.
After testing it at the Little Cottonwood Treatment Plant, which had similar stairs, the
climber did not do too well. The stairs were slightly higher and the skid got caught. The rod did
not have enough torque to lift it up, and it slid to the right after it was above the stairs. For it to
go up the stairs, Cleon had to hold it up slightly before the skid and correct its path. We decided
to add a plywood cage to be able to put a rod on each side of the machine. This would mean it
would lift up without falling to one side.
4

Results
We decided after testing the model to add a front axle that would put a rod on each side. This
required adding a few gears and a belt that would attach the front axle to the gearbox and motor so that
the machine would go up the stairs as planned. After some testing we discovered that we needed to
make the design from plywood. This would help to stabilize the front axle more, as the cardboard
tended to warp.
We then needed to add more stabilizers as the belt
tended to pull the material together causing the
machine to turn to the right like before. So we added a
balsa wood cage to go around each side that the front
axle would then go through. This helped to strengthen
the wood. We also needed to add wooden washers
around where the belt went to prevent it from slipping from the gears.
After trying it on the staircase, without the motors, we decided to cut most of the skid
down so there would be less weight. We also decided to move one of the battery packs forward
so that the front of the machine had more
weight, making it less likely for the machine
to tip backwards on the stairs. Thus the final
design was decided on.
5

Conclusion
Here is a list of the individual cost of each item to make a similar prototype:
1. Rod Motor: High-speed 9-18 Volt DC motor, 18,000 RPM, 1.98 A maxa. Cost: $5
2. R/C Car Motor: a. 1 Total, Cost: $6
3. R/C Car Wheels with Axles:a. Axle with 3” wheels: 1 total, Cost: $12
4. Basla Wood:a. Sheets: 2 total, Cost: $6.99 eachb. Square Dowels: 2 total, Cost: $2.68 eachc. Circular Dowels: 1 total, Cost: $2.98
5. Power Switches:a. DPDT Heavy Duty Center-Off Toggle Switch, Rated 10A at 125VAC, 6A at 250VAC:
2 total, Cost: $4.956. Wiring:
a. Wires: 2 cables, Cost: $157. Gearbox
a. Metal Gearbox: 1 total, Cost: $208. Rods:
a. Metal Rods: 2 total, Cost: $29. Nylon coupler:
a. Nylon coupler, drilled with rivets: 1 total, Cost: $20
Here are the measurements for the finished product:
Frameo tip to end of skid- 2'3" o width of spoke axle- 1'7”o highest point to bottom of wheel- 10.5" o thickness of most of the wood- .125” (1/8”)
Skido top to bottom- 4" o support front to back- 9" o total length- 1' o width- 7.5"
Support Cage o each bar- .5" x .5" x 4.5" o side to side (cage, NOT axle)- 9.375" (9+3/8) o the squares on the side- 4"x4"
Axles, Wheels and Chaino front axle to R/C axle- 7”
6

o R/C wheels diameter- 4”o front axle to gear box axle- 3.5”o chain from front to back (not total length of chain!)- 5”o End of R/C wheel to frame- 4"o Front tip to spoke axle- 4"
Battery Packso 4-battery- 2.5” width, 1.5” height, 1” deepo 8-battery- 2.5” x 2.5” x 1.5” deepo 8-batter is 2.75" from the top of base directly above it
Motorso little motor diameter- 1”o little motor length- 1.5”o little motor's center to top of base directly above it- 5.5"
Switcheso 1.25” x .75”
Couplero length- 1.5” o distance from frame- .5”
7

Recommendations
This stair climber is a great machine. It is unique. It is an amazing feat of engineering
that took some serious creativity to do. It can climb the stairs. It can handle small light loads.
The fact that it is small, lightweight and portable makes it a great product to add to your line
up. The whole thing is small enough to fit into the back of a modern day car.
The overall cost to produce this machine is a mere $116 dollars. This cost can also go
down significantly if you were to mass produce this product or have the parts made in-house.
You can reduce the costs even more by putting the basics in a kit and sending it to the
consumer to build them themselves. Imagine the joy that the regular person will have at
accomplishing building his own stair climbing machine. This will excite the tinker or builder in
any household, and probably trill their spouse too.
8

References
1. Engineering Design Graphics by James H. Earle
2. Internet
a. Youtube-videos used for research
b. Google-research on machine and parts.
3. Francis Afgan
4. Mike Hone-Electrician
5. Metropolitan Water District of Salt Lake and Sandy – for use of their stairs to test our machine.
9

Appendix A
1. Camera
a. Casio - Point & Shoot - 14.1 megapixel - Compact Sensor - 4 x optical zoom - CCD
- Standard SD - SDHC - Built-in Flash - ISO 3200 - 4.1 ounce
2. Calculator
a. TI-89 Graphing calculator: Graphing calculator handles calculus, algebra,
matrices, and statistical functions; 188 KB RAM and 2.7 MB flash memory for
speed; plenty of storage for functions, programs, data; Large 100 x 160 pixel
display for split-screen views; USB kion-the-go technology for file sharing with
other calculators and connecting with PCs
3. Microsoft Software-2010 Edition
a. PowerPoint
b. Word
c. Publisher
4. Laptop
a. Dell Inspirion N1050
10

Appendix B
Sketches
11

12

Appendixes
1







![Evaluation of the BioFlo 320 Process Capabilities · Evaluation of the BioFlo ... cm 4.01 5.23 6.28 7.19 in 1.58 2.06 2.47 2.83 Vessel (ID) : Impeller (OD) [-] 1.98 1.97 1.98 2.01](https://static.fdocuments.us/doc/165x107/6001575342f3372baa4c12b5/evaluation-of-the-bioflo-320-process-capabilities-evaluation-of-the-bioflo-cm.jpg)