Introduction ADL...
6
誠愛リハビリテーション病院 渕 雅子 「 「ADL ADL に対する評価と介入」 に対する評価と介入」 ~ボバース概念を背景として~ ~ボバース概念を背景として~ ADL 質 Introduction ICF:活動 Performance/ capacity 個人/環境 効率性・効果的 快適さ 快適さ 繰り返し学習された機能・共通する機能 姿勢制御・ボディースキーマ-(身体図式) 結果としてのADL/プロセスの重要性 ICFの特徴 • プラス面を重視する 「残存機能」「残存能力」ではない 潜在能力を導き出すこと • 活動と参加 課題志向型アプローチ 個々人のニーズや願望 当事者の選択 専門家としての提案 ボバースアプ ボバースアプ ローチが目指 ローチが目指 した全人間的 した全人間的 アプローチ アプローチ ボバース概念 ボバース概念 そのもの そのもの ボバース概念 現在: ・ 中枢神経系の損傷による姿勢緊張・運動・機能化 の問題を持つ人々の評価と治療への問題解決方法 である。 ・ 治療目標は、促通を通して姿勢コントロールと選択 運動を改善することにより、機能を最大限に引き出 すことである。 IBITA 2005 ・効果的な機能に要求される課題に直結した動きと 基本となる姿勢コントロールの両方の改善への直接 的に治療する、唯一の神経リハビリテーションアプ ローチである。 ・ボバース概念は一連の治療またはテクニックという よりはむしろ、臨床的理由付けの過程である。 ボバース概念の確認 ボバース概念の確認 機能的活動 代償的にできるし、参加も可能 ボバース概念ではない ボバース概念ではない いかに患者の生活の質を向上するか、 治療による生活の質的変化を説明できるか これができなければ将来はない きちんとしたエビデンスを! 課題指向型アプローチ • 課題指向型アプローチ(タスクオリエンテート プラクティス/アプローチ) • タスク(課題)を分析し、それがなぜ難しいの か理由を明確にする タスクの分析に基づくimpairmentの治療 Whole Task/Part Task タスク獲得に導く • タスクを繰り返し練習する → タスクプラクティス Mary Lynch Mary Lynch チューターズモジュール チューターズモジュール2008 2008 より より
Transcript of Introduction ADL...

誠愛リハビリテーション病院渕 雅子
「「ADLADLに対する評価と介入」に対する評価と介入」
~ボバース概念を背景として~~ボバース概念を背景として~
ADL 質Introduction
ICF:活動
Performance/capacity
個人/環境
効率性・効果的
快適さ快適さ
繰り返し学習された機能・共通する機能
姿勢制御・ボディースキーマ-(身体図式)
結果としてのADL/プロセスの重要性
ICFの特徴• プラス面を重視する「残存機能」「残存能力」ではない
潜在能力を導き出すこと
• 活動と参加課題志向型アプローチ
個々人のニーズや願望
当事者の選択 専門家としての提案
ボバースアプボバースアプ
ローチが目指ローチが目指した全人間的した全人間的アプローチアプローチ
ボバース概念ボバース概念そのものそのもの
ボバース概念現在:
・ 中枢神経系の損傷による姿勢緊張・運動・機能化の問題を持つ人々の評価と治療への問題解決方法である。
・ 治療目標は、促通を通して姿勢コントロールと選択運動を改善することにより、機能を最大限に引き出すことである。 IBITA 2005・効果的な機能に要求される課題に直結した動きと基本となる姿勢コントロールの両方の改善への直接的に治療する、唯一の神経リハビリテーションアプローチである。
・ボバース概念は一連の治療またはテクニックというよりはむしろ、臨床的理由付けの過程である。
ボバース概念の確認ボバース概念の確認
機能的活動 代償的にできるし、参加も可能
ボバース概念ではないボバース概念ではない
いかに患者の生活の質を向上するか、
治療による生活の質的変化を説明できるか
これができなければ将来はない
きちんとしたエビデンスを!
課題指向型アプローチ
• 課題指向型アプローチ(タスクオリエンテートプラクティス/アプローチ)
• タスク(課題)を分析し、それがなぜ難しいのか理由を明確にするタスクの分析に基づくimpairmentの治療
Whole Task/Part Task タスク獲得に導く
• タスクを繰り返し練習する→ タスクプラクティス
Mary Ly nchMary Ly nch チューターズモジュールチューターズモジュール20082008よ りよ り

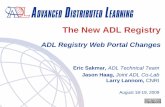
運動制御のレベルと脳の構造運動制御のレベルと脳の構造
汎用性運動ジェネレータ
アクションジェネレータ
監視 判断予測随意的選択
パターンジェネレータ
脊髄 脳幹
中脳 橋
大脳運動野
大脳連合野
小脳
大脳基底核
評価
感覚入力 運動出力
辺縁系
脳と運動 丹治
更衣動作更衣動作
初期時初期時
1ヵ月後1ヵ月後
着衣の問題着衣の問題 更衣動作:正常運動のコンポーネントは?
四肢(上肢)の選択運動、パーセプション、四肢(上肢)の選択運動、パーセプション、
姿勢制御、コアスタビリティ姿勢制御、コアスタビリティ課題志向課題志向
1.典型的な高次能機能障害がADLを阻害する2.ADLの基礎となる構成要素(機能)感覚-運動への高次脳機能障害の影響
3.損傷後のADL再学習(再獲得)における高次脳機能の影響
・障害を持った、以前とは違う自己
・以前の自己における運動記憶(ADL)
新しい学習 古い記憶の修正(認知・行為)身体失認・失行
身体図式の再構築・運動(パターン)の学習
個々のおかれた環境の中で
中枢神経疾患患者の中枢神経疾患患者のADLADLと高次能機能障害と高次能機能障害 靴操作靴操作 下衣操作下衣操作

座位バランス座位バランスと靴操作と靴操作
運動制御と姿勢制御運動制御と姿勢制御運動制御と姿勢制御
日常生活活動と姿勢制御日常生活活動と姿勢制御
質の高いADL獲得へのアプローチ
1)効率的で効果的なADLの追求・できるADL しているADL ではしていればいいのか?・できないのはなぜか(WHY)どのようにしているのか(HOW)を徹底的に追求する。・各ADL項目の構成要素を考え
2)障害された機能を回復させるのにADLを手段として利用する
共通する機能共通する機能
特異的機能特異的機能段階的統合段階的統合
姿勢制御姿勢制御
対象・操作対象・操作
Shumway-cook&Woollacott 1995
筋骨格系
姿勢制御のシステムモデル
神経筋
各感覚システム
感覚戦略 内的表象
適応的メカニズム
予測的
メカニズム
Anticipatory Mechanisms予測的メカニズム
・事前にやる戦略
・事前にプログラムされた筋群にフォーカスがある
・姿勢の揺れを最小にする
・中心の安定(コアスタビリティー)
・選択運動のために不可欠である
・経験から学んでいる
・課題特有な運動
2007ゲリン デアドバンスコース
Anticipatory MechanismsAnticipatory Postural Adjustments(APA’s)・APA’sは随意運動による動揺、乱れを予測して体を準備する・フィードフォワード姿勢調節・Preparatory APA’s(pAPA’s)準備的APA’sは運動に100msec以上先行する・Accompanying APA’s(aAPA’s)随伴するAPA’sは運動の間中起こり、運動が実行される間中体または体の分節を安定させることを助ける・経験によるもので、経験によって反応を学習する
・フィードバックにより修正される
2007ゲリン デアドバンスコース先行随伴性姿勢調節
猫の前肢あげ
姿勢調節のフィードフォワード制御姿勢調節のフィードフォワード制御

先行随伴性姿勢調節 APA
• 目的動作の主動筋の活動より前に起こる活動・安静立位状態から片方の手をすばやく水平位前方挙上させた際三角筋前部線維の放電に先行して同側大腿二頭筋と対側脊柱起立筋の筋放電の発見
1967 Belen’kii et al.先行研究:APAに影響を及ぼす要因1)主運動のパフォ-マンス
2)運動開始の重心の位置
3)主運動の種類
4)姿勢平衡の不安定性
• 上肢挙上動作• つま先立ち動作• 歩行開始動作• 一歩踏み出し動作• 垂直跳び
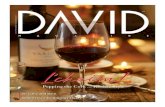
Postural ControlHodges & Ric hardson 19 97
Anticipatory Mechanisms: EMG activity of each of the trunk muscl es rel ative to the onset of deltoid activity.
TrATrA
IOIO
EOEO
RARA
MFMF0 50-50
Extens ion
Flex ionAbduct ion
100
Mary Lynch-Ellerington講義より
腹横筋腹横筋
内腹斜筋内腹斜筋
外腹斜筋外腹斜筋
腹直筋腹直筋
多裂筋多裂筋
様々なADL動作には、背景となる感覚―運動機能に共通となる要素があると考える。靴や靴下、ズボンの着脱は、
一側下肢を支持基底面から持ち上げ保持しながら操作する動作である。今回、下肢上げ動作が靴下はき動作の自立にどのように関連しているかを調べるために、三次元動作解析装置を使用して
動作を分析し知見を得たので報告する。
はじめに
第42回OT学会下衣着脱動作の分析一側下肢持ち上げ動作時の運動力学的検証
渕 雅子・大田瑞穂(PT)・山本澄子
• 昨年のOT学会にて下衣更衣動作の基本となる端座位での片足上げ動作について、健常者・靴下はき自立片麻痺患者・非自立患者に対し、三次元動作解析装置を用いて計測・分析した結果、非自立者は、下肢上げの際に体幹を中心とした姿勢のくずれと、床反力作用点の不安定な変位、殿部床反力の麻痺側偏移が特徴的であった。
• 今回靴下はきの自立度の異なる片麻痺患者に対し同様の測定を行い、自立に関連する片足上げ動作時の力学的特徴を明確にする。
はじめに
第43回OT学会下衣着脱動作の分析
一側下肢持ち上げ動作時の運動力学的検証(第2報)
誠愛リハビリテーション病院 渕 雅子・大田瑞穂(PT)
三次元動作解析装置による三次元動作解析装置による
第42回、43回本学会にて、下衣更衣動作の基礎となると考える、端座位での片足上げ動作を三次元動作解析装置を用いて計測し 、靴・靴下着脱動作の自
立度との関係を検討した結果、片足上げ動作時に身体を安定させ、支持基底面での圧中心(COP)の軌跡の移動範囲や運動開始位置との変位が少なく、正中に留まっていることが自立の背景と考察した。
今回は、靴下はき非自立患者2名に対しOT介入による行動評価と力学的評価を経時的に追い検討する。
靴・靴下着脱動作の経時的分析靴・靴下着脱動作の経時的分析
第43回OT学会0
5 0
10 0
15 0
20 0
25 0
30 0
35 0
40 0
0 5 10 15
0
50
100
150
200
250
300
350
400
0 5 10
自立者 見守り者 非自立者
0
50
1 00
1 50
2 00
2 50
3 00
3 50
4 00
0 5 1 0
非麻痺側麻痺側
殿部床反力鉛直成分(Fz)

-2 00
-1 50
-1 00
- 50
0
- 40 -2 0 0 20 4 0
-2 00
-1 50
-1 00
- 50
0
-40 -20 0 2 0 40
-40mm 0 40mm
-200mm
-50mm
C
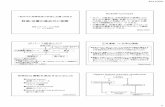
床反力作用点(COP)の軌跡
-50mm
-40mm 0 40mm
-200mmA
左 前 右
後
矩形面積6.3cm2
1.3cm
矩形面積
16.4cm2
2.8 cm22
-200
-150
-100
-50
0
-40 -20 0 20 40
-40mm 0 40mm
-50mm
-200mmE
左 前 右
矩形面積20.8cm2
1.2 cm2
全国回復期リハビリテーション病棟連絡協議会研究大会全国回復期リハビリテーション病棟連絡協議会研究大会
シンポジウム:シンポジウム:
やさしくそして科学的な基本動作やさしくそして科学的な基本動作
すべての基本がそこにあるすべての基本がそこにある““基本動作基本動作””
ADLADLにおける共通機能とはにおける共通機能とは
食事動作食事動作
整容動作整容動作
排泄動作排泄動作
更衣動作更衣動作
入浴動作入浴動作
基本動作基本動作
姿勢コントロール姿勢コントロール操作操作
到達範囲
リーチをコード化する
対象操作対象操作
運動の身体図式・道具の身体図式
入来篤史 神経研修の進歩2004
創造とアップデート
“姿勢身体図式”
• 姿勢コントロールを作り出す際の姿勢の身体図式の特定の役割を理解する。
• オリエンテーションと安定性から成る。
体の指向性が重要
フィードバックが異常では正しい運動学習が起こらない
ガイドして正しい運動を行うことで身体図式が作られる(APAが正しく起こる)
• 予期的な姿勢調整の基礎
• chunking and De-chunking

chunking and De-chunking
• 正常の身体図式:位置と機能のマッピングがある(親指をよく使っていると親指のエリアが大きくなる)手と指が一番優位(大きい)である
• 片麻痺になると代償によってchunkingが起こる→肩を代償的に使っていると肩のエリアが大きくなり境界線が無くなる・・という様なことが起こる
• セラピストはこのchunkingをやめさせる→
De-chunking
感覚的な経路を拡げてくっついているのを分けてあげるような介入
*適応的chunkingを促す
正しい認知を実現する正しい認知を実現する
正しい行為を実現する正しい行為を実現する
トーンの調整
感覚情報の調整
姿勢運動の調整
PerceptionPerceptionの調整の調整
運動の計画・プログラム
の調整
動機付け・発動の調整
ハンドリングハンドリングKey Points of ControlKey Points of Control
活動活動
正しい感覚・知覚を実現する正しい感覚・知覚を実現する
正しい動作・運動を実現する正しい動作・運動を実現する
適切な
対象者の障害を解釈し、対象者の障害を解釈し、
対象者自身を理解する対象者自身を理解する