INTRODUCTION A L’ANALYSE DES MECANISMES · Déplacements du centre de masse de la caisse au cours...
62
INTRODUCTION A L’ANALYSE DES MECANISMES Pierre DUYSINX Université de Liège Année Académique 2013-2014 1
Transcript of INTRODUCTION A L’ANALYSE DES MECANISMES · Déplacements du centre de masse de la caisse au cours...

INTRODUCTION A L’ANALYSE DES MECANISMES
Pierre DUYSINX
Université de Liège
Année Académique 2013-2014
1

Références bibliographiques
T. Gillespie. « Fundamentals of vehicle Dynamics », 1992, Society of Automotive Engineers (SAE)
W. Milliken & D. Milliken. « Race Car Vehicle Dynamics », 1995, Society of Automotive Engineers (SAE)
R. Bosch. « Automotive Handbook ». 5th edition. 2002. Society of Automotive Engineers (SAE)
J. Reimpell, H. Stoll, J. Betzler. « The automotive chassis: engineering principles ». 2nd edition. 2001, SAE.
J.Y. Wong. « Theory of Ground Vehicles ». John Wiley & sons. 1993 (2nd edition) 2001 (3rd edition).
M. Géradin & A. Cardona. « Flexible Multibody Dynamics » J. Wiley, 2001.
2

Plan de l’exposé
Importance de l’étude des mécanismes en véhicules
Concept de structure articulée
Paires cinématiques
Indice de mobilité et formule de Grübler
Redondance et singularité
Analyse des mécanismes plans
Exercices
3

Introduction
Etude des systèmes multicorps a fait l’objet de nombreuses études
Plusieurs implantations logicielles
ADAMS (http/www.adams.com)
DADS (http://www.cadsi.com)
MECANO (http://www.samcef.com)
SIMPACK (http://www.simpack.de/websitep.html)
Grande utilisation dans l’industrie
Automobile
Ferroviaire
Aérospatiale
4

Introduction
Modèle multicorps flexible d’une Peugeot 406 (PSA et Samtech)
5

Modélisation d’une Peugeot 406 en vue de l’étude de son comportement routier
Modélisation détaillée:
Des suspensions avant et arrière
De la transmission et de la boîte de vitesse
Du châssis avec des corps
rigides ou des super éléments
élastiques
Des modèles des
pneumatiques (modèles
de Pacejka)
Avec la courtoisie de PSA
6

Modélisation d’une Peugeot 406 en vue de l’étude de son comportement routier
Exemple:
modélisation
d’un sous-
système: la
direction Division du véhicule en sous-systèmes
7

Modélisation d’une Peugeot 406 en vue de l’étude de son comportement routier
Vue détaillée de la suspension avant et du système de direction
8

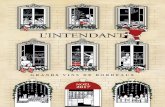
Modélisation d’une Peugeot 406 en vue de l’étude de son comportement routier
Déplacements du centre de
masse de la caisse au cours
de la manœuvre
Traj. horiz.
cdm caisse
Lacet cdm
caisse
Altitude z
cdm caisse
Roulis cdm
caisse
Tangage
cdm caisse 9

Modélisation d’une Peugeot 406 en vue de l’étude de son comportement routier
Vitesses et accélérations du
centre de la caisse au cours de
la manœuvre
Vit. longi.
cdm caisse
Acc. longi.
cdm caisse
Vit. Altitude z
cdm caisse
Acc. cdm
caisse
Rayon de courbure
trajectoire
Vit. de lacet
cdm caisse
10

Introduction
Suspensions et systèmes de direction
11

Introduction
Gillespie. Fig 8.1 12

Introduction
13

Introduction
Les trains d’atterrissage, c’est aussi le domaine des véhicules…
14

Concept de structure articulée
STRUCTURE ARTICULEE
Une structure articulée est un mécanisme est formée de corps rigides ou flexibles, reliés par des joints cinématiques
15

z
yx
B
A
C
z'
y'
x'
AB
C
Concept de structure articulée
DEGRES DE LIBERTE D’UN CORPS RIGIDE
Repérage d’un corps rigide libre dans l’espace
spécifier la position + l’orientation
au moyen de la position de 3 points non colinéaires
3 relations de liaisons (distance fixe entre les points)
6 degrés de liberté (DDL)
3 ddl de translation
position d’un point de référence dans un système de coordonnées
3 ddl de rotation
paramètres de rotation: angles d’Euler, de Bryant, etc.
16

Concept de structure articulée
JOINTS ET LIAISONS CINEMATIQUES Les corps rigides sont reliés par des joints
Introduisent des contraintes entre le mouvement des corps rigides du système multicorps
Contraintes algébro-différentielles en toute généralité
Si a on « N » corps rigides et « m » contraintes de liaison
Alors le système multicorps ne possède plus que 6N-m degrés de liberté
COORDONNES GENERALISEES Un ensemble de paramètres en nombre minimal permettant de décrire
la configuration du système
Généralement choisies pour satisfaire implicitement les contraintes de liaison
17

Paires cinématiques
Classification des paires cinématiques Le type de mouvement relatif autorisé
selon une ligne, une surface ou arbitraire dans l’espace
Le nombre de DDL = le nombre minimum de paramètres nécessaires pour décrire la
position du corps C2 relativement au corps C1
soit 5, 4, 3, 2, ou 1 DDL
la classe d’un joint = 6 - (nombre de DDL)
Le type de contact ponctuel, linéaire ou surfacique
Mode de fermeture Paires auto-fermées
si le contact entre les deux corps est garanti par la réalisation de la liaison
Paires fermées de force
si une force extérieure (gravité, ressort) est nécessaire pour avoir le contact
C1 Liaison
18

Paires cinématiques
Paires cinématiques supérieures et inférieures Paires inférieures:
Le contact entre les corps s’effectue sur une partie substantielle d’une surface.
Point essentiel : le mouvement relatif des corps l’un par rapport à l’autre est identique
Le mouvement est réversible : peu importe l’élément moteur
Seulement 6 paires
liaisons rotoïde (R ), prismatique (P) et hélicoïdale (H) (toutes de classe 5)
liaison cylindrique (C ) (classe 4)
liaison point sur plan (E) et sphérique (S) (classe 3)
Paires supérieures: Caractérisées par un contact ponctuel ou linéaire
Parfois sur un point immatériel
Toutes les autres
19

Paires cinématiques
Les 6 paires inférieures
20

Paires cinématiques
Exemples de paires supérieures 21

Paires cinématiques
Il est possible de remplacer la plupart des paires cinématiques par des combinaisons de joints de classe 5: rotoïde, prismatique ou hélicoïdal
22

Paires cinématiques
Norme AFNOR de représentation
des paires cinématiques
23

Chaînes cinématiques
Structures en chaîne ouverte simple (simple open-tree structure)
Chaque corps est attaché à seulement 2 voisins
Structure purement séquentielle
Architecture habituelle du robot manipulateur
Co
L
C
C
C
L
L
L
L
1
1
2
i
i+ 1
i n
n
24

Chaînes cinématiques
Structures en chaînes ouvertes arborescentes (multiple open-tree structure)
Certains corps sont connectés à plus de deux autres corps
Plus possible de numéroter les corps de manière séquentielle
Utilisation du concept de graphe
Possibilité d’avoir plusieurs effecteurs (comme le corps humain)
Co
1
Cn
+1
Ln+ 1
Ln+ 2
Ln+ k
Ln+ k+ 1Cm
Cn+ k
25

Chaînes cinématiques
Structure complexe (multiply connected structure)
Présence de boucles fermées
Modélisation basée sur les structures simplement connectées + contraintes liées à la fermeture des boucles
Avantage : grande raideur, grande précision, mais faible mobilité
Structure typique du mécanisme
Co
1
C
C
L
C
L
L3
2
4
2
35
26

Chaînes cinématiques
Soient:
nB, le nombre de corps
nJ, le nombre de joints
nL, le nombre de boucles
On montre aisément que le nombre de boucles cinématiques est liés au nombre de corps et de joints par la formule
En effet si la chaîne est ouverte on remarque aisément que le nombre de corps = nombre de joints. Pour refermer une boucle il faut ajouter un nouveau joint. Le nombre de boucles est donc égal au nombre de joints en surplus par rapport au nombre de corps
X
n L = n J ¡ n B
27

Indice de mobilité et formule de Grübler
Indice de mobilité M:
Nombre de paramètres libres pour déterminer la configuration du mécanisme
Formule de Grübler:
Soient
nB, le nombre de corps
nJ, le nombre de joints
nL, le nombre de boucles
fj les nombres de ddl de l’articulation j, et cj = 6-fj la classe du joint j
Le nombre de ddl d’une chaîne cinématique est donné par:
M = 6 n B ¡
n J X
j = 1
( 6 ¡ f j )
X
M = 6 ( n B ¡ n J ) +
n J X
j = 1
f j
28

Indice de mobilité et formule de Grübler
Formule de Grübler:
Le nombre de boucles:
L’indice de mobilité s’écrit alors
X
n L = n J ¡ n B
M =
n J X
j = 1
f j ¡ 6 n L
29

Indice de mobilité et formule de Grübler
Attention !
Dans le cas d’un mécanisme plan ou sphérique, on a seulement 3 ddls et le nombre de ddl d’une chaîne cinématique est donné par:
La formule de Grübler peut être erronée pour certaines structures complexes, si les contraintes cinématiques dans les boucles sont redondantes
Exemple: sous-ensemble plan dans un mécanisme tridimensionnel
ecome:
M = 3(nB ¡ nJ ) ¡nJX
j=1
fj
X
M =
n J X
j = 1
f j ¡ 3 n L
30

Exercices sur le calcul des ddls d’un mécanisme
nB = 3
nJ = 4
nL = nJ – nB = 1
fj = 1 (j=1…4)
M = 3*(3-4)+4=1
nB = 3
nJ = 4
nL = nJ – nB = 1
fj = 1 (j=1…4)
M = 3*(3-4)+4=1
31

Exercices sur le calcul des ddls d’un mécanisme
nB = 6
nJ = 7
nL = nJ – nB = 1
fj = 1 (j=1…7)
M = 6*(-1)+7=1
nB = 3
nJ = 4
nL = nJ – nB = 1
f1 =f4= 1; f2=2; f3=3
M = 6*(-1)+1+2+3+1=1 32

Exercices sur le calcul des ddls d’un mécanisme
nB = 8
nJ = 11
nL = nJ – nB = 3
fj = 1 (j=1…11)
M = 3*(-3)+11=2
33

Exercices sur le calcul des ddls d’un mécanisme
nB = 7
nJ = 11
nL = nJ – nB = 4
fj = 1 si R; fj = 2 si T; fj = 1 si
S M = 6*(-4)+1+5*2+5*3=2
34

Exercices sur le calcul des ddls d’un mécanisme
35

Exercices sur le calcul des ddls d’un mécanisme
nB = 7 nJ = 10 (P=4; S=5; U=1) nL = nJ – nB = 3 M = 6*(-3) + 4*1+5*3+1*2 = 3
36

Exercices sur le calcul des ddls d’un mécanisme
• nB = 7 • nJ = 8 (7 R + 1 P) • nL = nJ – nB = 1 • M = 6*(-1) + 8*1 = 2
37

Exercices sur le calcul des ddls d’un mécanisme
M = 3 !
38

PROPRIETES DES MECANISMES PLANS
39

Mécanismes plans
Soit un corps rigide ABC subissant un mouvement de rotation dans un plan
Les trajectoires et les vitesses des points A, B et C sont connues.
Les vitesses des points A, B et C jouissent des propriétés suivantes
40

Mécanismes plans
Existence d’un centre Instantané de Rotation (C.I.R.)
Les perpendiculaires communes aux trois vecteurs vitesses concourent en un point I appelé centre instantané de rotation (C.I.R.)
w est la vitesse angulaire instantané du solide autour de I
~ v A = ~ ! ^
¡ !
I A
~ v B = ~ ! ^
¡ !
I B
~ v C = ~ ! ^
¡ !
I C
41

Mécanismes plans
Quelques CIR évidents
Joint pivot : CIR sur le joint
Joint prismatique: CIR à l’infini dans la direction perpendiculaire au mouvement du joint
42

Mécanismes plans
Quelques CIR évidents
Came: CIR sur la perpendiculaire à la tangente commune
Roulement sans glissement: CIR au point de contact
43

Mécanismes plans
Si à partir d’un point on trace les vecteurs vitesses vA, vB et vC, leurs extrémités forment un triangle semblable et orthogonal au triangle ABC
44

Mécanismes plans
Théorème de composition des vitesses
La vitesse dans tout corps rigide peut s’écrire:
vitesse de A
vitesse relative de B par rapport à A
La vitesse relative de B par rapport à A
Soit
~ v B = ~ v A + ~ v B = A
~ v B = A = ~ ! ^
¡ !
A B
~ v B = ~ v A
+ ~ ! ^
¡ !
A B
45

Mécanismes plans
Théorème d’équiréciprocité des vitesses
¡ !
A B ¢ ~ v A =
¡ !
A B ¢ ~ v B
¡ !
A C ¢ ~ v A =
¡ !
A C ¢ ~ v C
¡ ¡ !
B C ¢ ~ v B =
¡ ¡ !
B C ¢ ~ v C
46

Mécanismes plans
Le champ des vitesses d’un corps rigide en rotation plane est complètement déterminé par la connaissance de la vitesse d’un de ses points et par la direction de la vitesse d’un autre point.
47

Théorème de Kennedy
Considérons 3 corps en mouvement relatif
Notons par I1,2 le CIR du mouvement du corps 2 par rapport au corps 1
par I2,3 le CIR du mouvement relatif des corps 2 et 3
et par I1,3 le CIR du mouvement relatif des corps 1 et 3
Ces trois CIR jouissent de la propriété d’être alignés comme le démontre le Théorème de Kennedy
48

Théorème de Kennedy
Théorème: les CIR de 3 corps en mouvement relatif sont alignés
Démonstration
Si P est un point du corps 2, sa vitesse est
Si P est un point du corps 3, sa vitesse est
si P est le centre instantané du mouvement de 2 par rapport à 3
~ v P 3 = ! 3 ~ e z ^
¡ ¡ ¡ !
I 1 ; 3 P
~ v P 2 = ! 2 ~ e z ̂
¡ ¡ ¡ !
I 1 ; 2 P
~ v P 2 = 3 = ~ v P 2 ¡ ~ v P 3 = 0
49

Théorème de Kennedy
Ceci signifie que les vecteurs ont même direction et même intensité
Même direction
soit si P= I23
Même intensité
¡ ¡ ¡ !
I 1 ; 2 P = =
¡ ¡ ¡ !
I 1 ; 3 P
¡ !
I 2 ; 3 = ¸
¡ !
I 1 ; 2 + ( 1 ¡ ¸ )
¡ !
I 1 ; 3
v P 2 = ! 2 I 1 ; 2 P = v P 3
= ! 3 I 1 ; 3 P
I 1 ; 2 P
I 1 ; 3 P
=
! 3
! 2
=
I 1 ; 2 I 2 ; 3
I 1 ; 3 I 2 ; 3
50

Théorème de Kennedy
Si w2.w3<0 alors le point I23 se trouve entre I12 et I13.
Si w2.w3>0 alors le point I23 se trouve à l’extérieur du segment I12 et I13 du côté du corps ayant la plus grande vitesse angulaire.
Si w2=w3 alors si I12 n’est pas confondu avec I13, la seule possibilité est que point I23 soit à l’infini (cas de corps en translation relative).
51

Théorème de Kennedy
52

Applications du théorème de Kennedy
Le théorème de Kennedy permet de déterminer le CIR de deux corps lorsque l’on connaît le CIR de ces deux corps par rapport à un troisième
De manière récursive, on peut déterminer les CIR d’un ensemble de n corps
Pour les mécanismes de suspension dans le plan, le théorème de Kennedy permet de déterminer le CIR de la masse suspendue (caisse) par rapport au sol
53

Applications du théorème de Kennedy
DÉTERMINER LES CIR DE N CORPS EN MOUVEMENTS RELATIFS
Nombre total de CIR
NCIR = n*(n-1)/2
Méthode pour les cas simples:
Déterminer le nombre total de CIR
Dresser la liste des CIR
Déterminer un maximum de CIR par inspection des mécanismes (joints pivots, roulement sans glissement)
Déterminer les CIR manquants par le théorème de Kennedy
54

Applications du théorème de Kennedy
DÉTERMINER LES CIR DE N CORPS EN MOUVEMENTS RELATIFS
Méthode pour les cas complexes:
Déterminer le nombre total de CIR
Porter sur un cercle autant de points que de corps différents
Déterminer un maximum de CIR par inspection des mécanismes
Relier sur le cercle des points correspondants aux CIR trouvés
Déterminer les CIR manquants par le théorème de Kennedy
Trouver 2 trios de corps comprenant les corps
Le CIR se trouve à l’intersection des lignes contenant le CIR
Par exemple à la figure suivante, le CIR de 1 et 3 se trouve sur l’intersection des droites I12 I23 et I14 I34.
Utiliser la méthode jusqu’à ce que le CIR désiré soit trouvé
55

Applications du théorème de Kennedy
56

Exercices:
Déterminer les centres de roulis (CIR de la caisse par rapport au sol) des suspensions suivantes
57

Exercices:
Déterminer les centres de roulis (CIR de la caisse par rapport au sol) des suspensions suivantes
58

Exercices:
Déterminer les centres de roulis (CIR de la caisse par rapport au sol) des suspensions suivantes
59

Exercices:
Déterminer le centre de roulis (CIR de la caisse par rapport au sol) de la suspension suivante
60

Exercices:
61

Exercices:
62