Introducción al control de movimiento integrado...
20
Copyright © 2005 Rockwell Automation, Inc. All rights reserved. 1 Introducción al control de movimiento integrado Kinetix Graham Elvis & Darren Briggs Customer Support Speed & Position Pere Garriga Consultor técnico OEM
Transcript of Introducción al control de movimiento integrado...

Copyright © 2005 Rockwell Automation, Inc. All rights reserved. 1
Introducción al control de movimiento integrado
Kinetix
Graham Elvis & Darren BriggsCustomer Support Speed & PositionPere GarrigaConsultor técnico OEM

2Copyright © 2005 Rockwell Automation, Inc. All rights reserved.
Contenido de la sesión
1. ¿Qué es Kinetix?1. ¿Qué es Kinetix?
2. Control de movimiento integrado Kinetix2. Control de movimiento integrado Kinetix
3. Introducción a CompactLogix3. Introducción a CompactLogix
4. Sesión práctica4. Sesión práctica

3Copyright © 2005 Rockwell Automation, Inc. All rights reserved.
Kinetix, ¿qué es?

4Copyright © 2005 Rockwell Automation, Inc. All rights reserved.
1 - Control
Ladder
SFC
ST

5Copyright © 2005 Rockwell Automation, Inc. All rights reserved.
2 - Redes

6Copyright © 2005 Rockwell Automation, Inc. All rights reserved.
3 - Servodrives

7Copyright © 2005 Rockwell Automation, Inc. All rights reserved.
4 - Servomotores

8Copyright © 2005 Rockwell Automation, Inc. All rights reserved.
5 - Actuadores

9Copyright © 2005 Rockwell Automation, Inc. All rights reserved.
Kinetix: Sistema de control de movimiento integrado
Escaler
a
SFC
ST

10Copyright © 2005 Rockwell Automation, Inc. All rights reserved.
¿Dónde se puede aplicar Kinetix?
En cualquier aplicación que requiera:
•Precisión en el posicionamiento del producto •Rapidez en aceleración /desaceleración •Precisión en el control de la velocidad con cargas variables•Repetibilidad, precisión, reducir tiempo de ciclo, eliminar mantenimiento de elementos mecánicos•Una solución total con equipos Rockwell Automation incluyendo actuadores mecánicos
Laminadores
Empaquetado
Embalaje en cartón
Embolsadora
Embotellado
Enlatado
Embalaje farmacéutico
Procesado de alimentos
Envasado flow-pack
Paletizado
EtiquetadoEnsamblado automático
Transportes inteligentes
Robots pick & Place
Laminado
Envoltura
Alimentadores para prensas
Montaje de neumáticos
Ejes de línea electrónicos

11Copyright © 2005 Rockwell Automation, Inc. All rights reserved.
Kinetix es un sistema de altas prestaciones y gran potencia
Completamente programable utilizando 38 instrucciones de control de movimiento
Instrucciones de control de movimiento para
coordinación multieje
Editor gráfico de PCAM lleno de prestaciones

12Copyright © 2005 Rockwell Automation, Inc. All rights reserved.
Kinetix el control de movimiento total y auténticamente integrado
• Integración drive y servo motorUn único software, RSLogix5000, para la configuración, monitorización y programación
• Creación y monitorización de ejesen un sólo paquete
• Cuadros de diálogo/asistentesConfiguración de los ejes incluyendo motores y drives. Mediante una sencilla configuración guiada por un asistente
• Ganancias y dinámicaSe configuran las ganancias y la dinámica del sistema, según la selección del catálogo de variadores y motores

13Copyright © 2005 Rockwell Automation, Inc. All rights reserved.
Kinetix es flexible
• Lógica estándar– Rutinas comunes para aplicaciones de control
de movimiento• Altas prestaciones
– La opción de feedback de alta resolución mejora la precisión del posicionamiento y reduce los tiempos de ciclo
– La opción de feedback absoluto elimina los ciclos de búsqueda de referencia, que suelen requerir bastante tiempo
• Diagnóstico mejorado– Información detallada sobre los drives o
motores disponible en el software RSLogix5000
– Se presenta la información de fallos y de estado de los variadores en texto descriptivo
– Con los gráficos de tendencias se recopilan y presentan parámetros relevantes
Escaler
a
SFC
ST

Copyright © 2005 Rockwell Automation, Inc. All rights reserved. 14
PlataformaCompactLogix L4x

15Copyright © 2005 Rockwell Automation, Inc. All rights reserved.
Arquitectura básica
1769Compact I/O
1769Compact I/O
Compact Bus(hasta 16 módulos)
Compact Bus(hasta 16 módulos)
1768 Bus(hasta dos módulos)
1768 Bus(hasta dos módulos)
Controlador CompactLogix L43
Controlador CompactLogix L43
Fuente de Alimentación
Fuente de Alimentación
Módulos del Bus 1768(por ej. comunicaciones,
movimiento)
Módulos del Bus 1768(por ej. comunicaciones,
movimiento)
16Copyright © 2005 Rockwell Automation, Inc. All rights reserved.
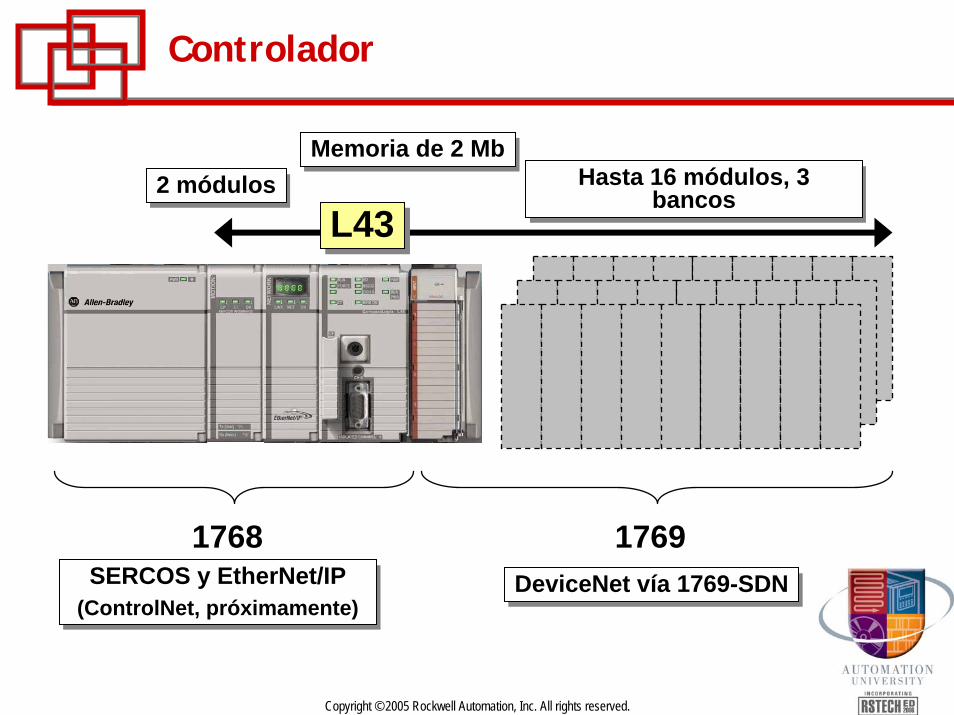
Controlador
2 módulos2 módulos Hasta 16 módulos, 3 bancos
Hasta 16 módulos, 3 bancos
Memoria de 2 MbMemoria de 2 Mb
L43L43
1768 1769SERCOS y EtherNet/IP
(ControlNet, próximamente)SERCOS y EtherNet/IP
(ControlNet, próximamente)DeviceNet vía 1769-SDNDeviceNet vía 1769-SDN
17Copyright © 2005 Rockwell Automation, Inc. All rights reserved.
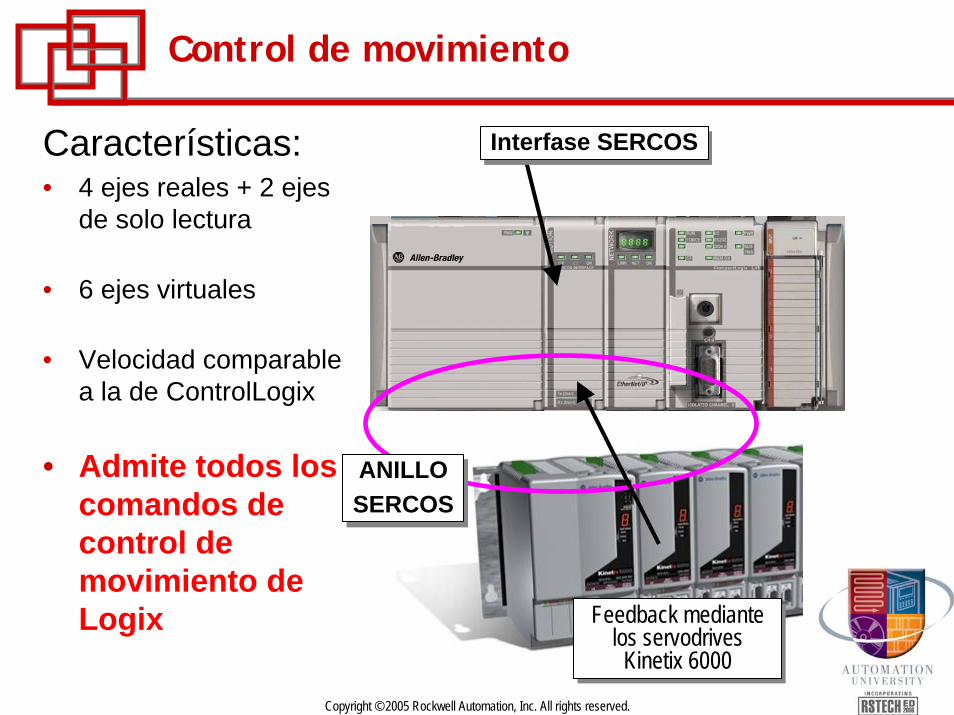
Control de movimiento
Feedback mediante los servodrives
Kinetix 6000
Feedback mediante los servodrives
Kinetix 6000
Características:• 4 ejes reales + 2 ejes
de solo lectura
• 6 ejes virtuales
• Velocidad comparable a la de ControlLogix
• Admite todos los comandos de control de movimiento de Logix
ANILLOSERCOSANILLOSERCOS
Interfase SERCOSInterfase SERCOS

18Copyright © 2005 Rockwell Automation, Inc. All rights reserved.
Movimiento integrado Kinetix™
• 1ª Practica : Configuración básica de un eje con servodrive Kinetix 6000– Cómo arrancar el software de programación RSLogix 5000 – Creación de un nuevo proyecto– Configuración de un módulo Sercos– Cómo añadir un servodrive Kinetix 6000 en Sercos– Creación de un grupo de ejes– Configuración de las propiedades de los ejes– Descarga de programas
• 2ª Práctica : Puesta en marcha de los ejes: verificación funcionamiento y ajuste– Verificación del funcionamiento del hardware de los ejes– Ajuste de los ejes– Fallos frecuentes en el proceso de ajuste
• 3ª Práctica : Uso de los comandos directos de control de movimiento

19Copyright © 2005 Rockwell Automation, Inc. All rights reserved.
Movimiento integrado Kinetix™
• 4ª Práctica: Técnicas de resolución de problemas– Abrir un archivo de plantillas – Disparidad en la codificación electrónica del módulo de E/S – Velocidad de transmisión incorrecta en el anillo Sercos– Disparidad en la codificación electrónica de Sercos
• 5ª Práctica : Cómo añadir un programa de captura y registro de fallos– Esta práctica se basa en un método de programación
modular. Aprenderá a trasladar rutinas y tags definidos por el usuario (UDT) a un proyecto existente. Se trata de un programa para capturar los posibles fallos en el control de movimiento.
• 6ª Práctica : Cómo comprobar el programa de captura de fallos

Copyright © 2005 Rockwell Automation, Inc. All rights reserved. 20
¿Preguntas?