
Intro. 2005 May 9MOPS Preliminary Design Review2 Preliminary Design Review The Pan-STARRS Moving...
245
Intro
-
date post
19-Dec-2015 -
Category
Documents
-
view
221 -
download
0
Transcript of Intro. 2005 May 9MOPS Preliminary Design Review2 Preliminary Design Review The Pan-STARRS Moving...

Intro
2005 May 9 MOPS Preliminary Design Review 2
Preliminary Design Review
The Pan-STARRSMoving Object Processing System

2005 May 9 MOPS Preliminary Design Review 3
PDR Purpose (from the charge):
Ensure that the preliminary design meets the requirements as specified in the PS-1 MOPS SRS
Ensure that the development plan will enable schedules and budgets to be maintained
Ensure that integration and testing procedures have been considered
Ensure that risk mitigation plans have been developed for identified potential risks

2005 May 9 MOPS Preliminary Design Review 4
Schedule09:00 Intro & Requirements
OverviewRJ
Top-Level MOPS architecture RJ
10:30 Break
10:45 Algorithms RJ & TG
Software Design LD & RJ
12:30 Lunch
1:30 Hardware Design LD & JH
Status & Development Plan RJ
3:30 Break
3:45 Risk Assessment & Conclusion RJ

2005 May 9 MOPS Preliminary Design Review 5
MOPS Overview
• Identify known objects
• Discover new objects
• Derive observable parameters
• Catalogue objects
2005 May 9 MOPS Preliminary Design Review 6
MOPS Partners
• Carnegie Mellon University, Robotics Institute AUTON Laboratory (Kubica)
• Jet Propulsion Lab (JPL) (Chesley)• Minor Planet Center (MPC) (Spahr)• Science Applications International
Corporation (SAIC) (Heasley)• University of Helsinki (Kaasalainen)• University of Pisa (Milani)

2005 May 9 MOPS Preliminary Design Review 7
MOPS Timeline2003 Mar Hire Manager (Robert Jedicke)
2004 Apr Orbit Determination & Ephemeris Software Trade study (PSDC-500-001
2004 Jul Software Requirements Specifications (PSDC-530-001)
2004 Jul System Concept Definition (SCD)
2004 Aug Software Requirements Review (SRR)
2004 Sep NEO IOD Studies (PSDC-500-002)
2004 Nov Solar System Survey Simulations (PSDC-500-003)
2004 Nov Hire Post-Doc (Tommy Grav)
2004 Dec Hire SW Engineer (Larry Denneau)
2005 Apr Solar System Model (PSDC-500-004)
2005 Apr Algorithm Design Description (PSDC-530-002)
2005 Apr Software Design Description (PSDC-530-003)
2005 May Preliminary Design Review (PDR)

2005 May 9 MOPS Preliminary Design Review 9
Requirements Overview
• Top Level Requirements
• Selected Derived Requirements(especially modifications from SRR)
• External InterfaceRequirements
• Other important reqs

2005 May 9 MOPS Preliminary Design Review 10
Top Level Requirements
9.2.1 MOPS shall create and maintain a data collection of detections and object parameters (e.g., orbit elements, absolute magnitudes) for >90% of the PHOs that reach R=24 for 12 consecutive days during the course of PS operations.
(from PSDC-250-002 – PS-4 System Concept Definition)
Above R=24 all the time
for 12 days

2005 May 9 MOPS Preliminary Design Review 11
Top Level Requirements
9.2.2 MOPS shall create and maintain a data collection (DC) of detections and object parameters (e.g., orbit elements, absolute magnitudes) for >80% (TBR) of the members that reach R=24 for 12 consecutive days within each class of solar system object (Main Belt, Trojan, Centaur, TNO, Comet, etc, except NEO and PHO) during the course of PS operations.
(from PSDC-250-002 – PS-4 System Concept Definition)

2005 May 9 MOPS Preliminary Design Review 12
Top Level Requirements
9.2.3 MOPS shall calculate the efficiency and false-positive rates for detection, attributing, linking, orbit identification, etc., for solar system objects as a function of (at minimum) semi-major axis, eccentricity, inclination, absolute magnitude, position with respect to opposition and galactic latitude.
(from PSDC-250-002 – PS-4 System Concept Definition)

2005 May 9 MOPS Preliminary Design Review 13
Top Level Requirements
9.2.4 Data products created by MOPS shall be published to the PS Published Science Products Subsystem (PSPS).
(from PSDC-250-002 – PS-4 System Concept Definition)

2005 May 9 MOPS Preliminary Design Review 14
Top Level Requirements Highlights
• >90% of the PHOs that reach R=24 for 12 consecutive days
• >80% of the members of each of the other populations (MB,CEN,TNO,etc.) that reach R=24 for 12
• calculate efficiency and false-positive rates
• Data products published to the PSPS.
(from PSDC-250-002 – PS-4 System Concept Definition)

2005 May 9 MOPS Preliminary Design Review 15
Selected Derived Requirements
• Supplementary requirements on MOPS and other Pan-STARRS sub-systems in order to meet primary requirements
2005 May 9 MOPS Preliminary Design Review 16
Terminology Review: Detections, Tracklets, Tracks & Orbits
• Detection– A statistically significant collection of pixels after image
convolution with a shape kernel
• Tracklet– A set of 2 detections that may be observations of the
same object
• Track– A set of 2 tracklets that may be observations of the
same object
• Orbit– A six parameter representation of the heliocentric path of
an object

2005 May 9 MOPS Preliminary Design Review 17
Terminology Review: Detections, Tracklets, Tracks & Orbits

2005 May 9 MOPS Preliminary Design Review 18
Terminology Review: SOT, HC, LC, DC,
• Single Occurrence Transient = SOT– A detection that is not at the same position as any other
known stationary object in the past 30 (TBR) days
• High Confidence Detection– A detection that has a high probability of being a real
object (~>5)
• Low Confidence Detection– A detection that has a high probability of being a real
object (~>5)
• Data Collection = DC– A generalized database

2005 May 9 MOPS Preliminary Design Review 19
Terminology Review: Opposition, Sweet-Spots
Evening Sweet Spot Morning Sweet SpotOpposition

2005 May 9 MOPS Preliminary Design Review 20
Terminology Review: Observing Cycle
• Observing Cycle = OC– Integer number incrementing 12:00pm HST on
day of full moon
• Synthetic Object– An artificial object with orbital and shape
parameters
• Derived Object– A synthetic or real object and its parameters
derived from observations

2005 May 9 MOPS Preliminary Design Review 21
Selected Derived Requirements(from PSDC-530-001-03 – MOPS Software Requirements Specification)
3.2.2.1 Daily 15-body ephemeridesThe MOPS shall be capable of determining the astrometric location and apparent magnitude (to a precision equal to or exceeding the astrometric and photometric precision of the PS system) of 108 solar system objects for each day of the survey and provide error estimates on each value.
2005 May 9 MOPS Preliminary Design Review 22
Selected Derived Requirements(from PSDC-530-001-03 – MOPS Software Requirements Specification)
3.2.3.1 Attribution efficiency
The MOPS shall be >99% efficient at linking
≥ 2 detections within the low confidence (LC) SOT DC of a known moving object on the same night to the known orbit when the estimated error in the location is <15".

2005 May 9 MOPS Preliminary Design Review 23
Selected Derived Requirements(from PSDC-530-001-03 – MOPS Software Requirements Specification)
3.2.3.3 Intra-lunation linking efficiency
The MOPS shall meet the following minimum efficiency requirements at identifying multiple detections of the same unknown object detected on at least 3 nights within a lunation for different classes of solar system objects:
Object Type Minimum Efficiency
PHO 95%
MB 98%
KBO 99%

2005 May 9 MOPS Preliminary Design Review 24
Selected Derived Requirements(from PSDC-530-001-03 – MOPS Software Requirements Specification)
3.2.3.5 Orbit identification efficiency
The MOPS shall be >98% efficient at linking intra-lunation short-arc orbits of at least 10 days to other intra-lunation short-arc orbits of at least 10 days for the same object observed in other lunations or apparitions.

2005 May 9 MOPS Preliminary Design Review 25
Selected Derived Requirements(from PSDC-530-001-03 – MOPS Software Requirements Specification)
3.2.3.7 Low Confidence SOT False DetectionsThe MOPS shall meet the stated efficiency and accuracy requirements (3.2.3.1-3.2.3.6) when the false detection rate for LC SOTs is 2•105/deg2.
3.2.3.8 High Confidence SOT False DetectionsThe MOPS shall meet the stated efficiency and accuracy requirements (3.2.3.1-3.2.3.6) when the false detection rate for HC SOTs is 2•102/deg2.

2005 May 9 MOPS Preliminary Design Review 26
External Interfaces
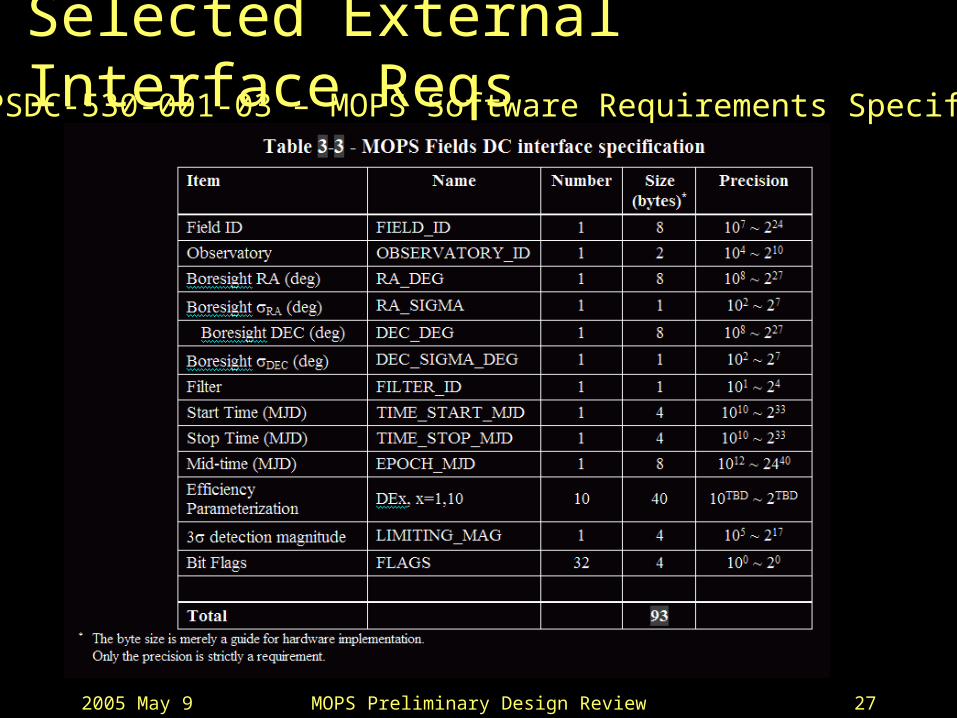
2005 May 9 MOPS Preliminary Design Review 27
Selected External Interface Reqs(from PSDC-530-001-03 – MOPS Software Requirements Specification)
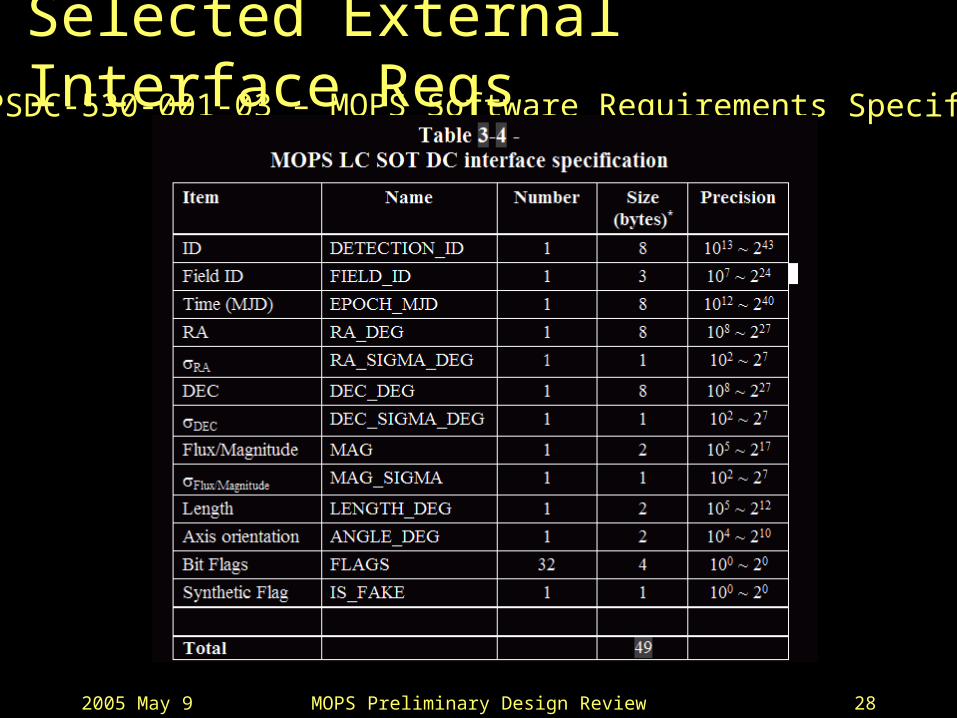
2005 May 9 MOPS Preliminary Design Review 28
Selected External Interface Reqs(from PSDC-530-001-03 – MOPS Software Requirements Specification)

2005 May 9 MOPS Preliminary Design Review 29
Selected External Interface Reqs(from PSDC-530-001-03 – MOPS Software Requirements Specification)
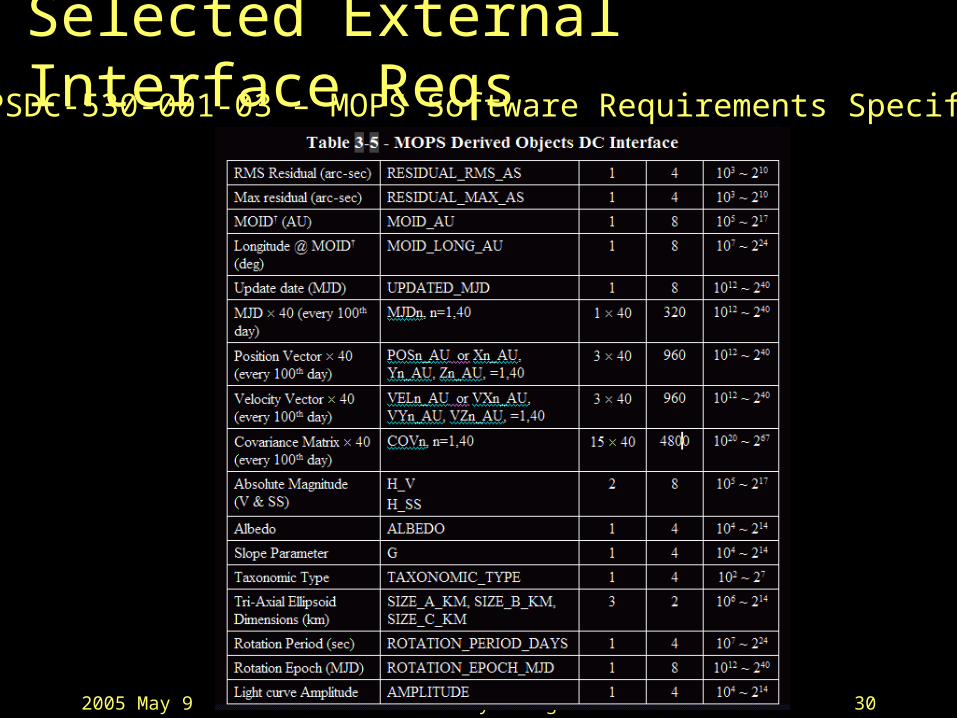
2005 May 9 MOPS Preliminary Design Review 30
Selected External Interface Reqs(from PSDC-530-001-03 – MOPS Software Requirements Specification)

2005 May 9 MOPS Preliminary Design Review 31
Selected External Interface Reqs(from PSDC-530-001-03 – MOPS Software Requirements Specification)
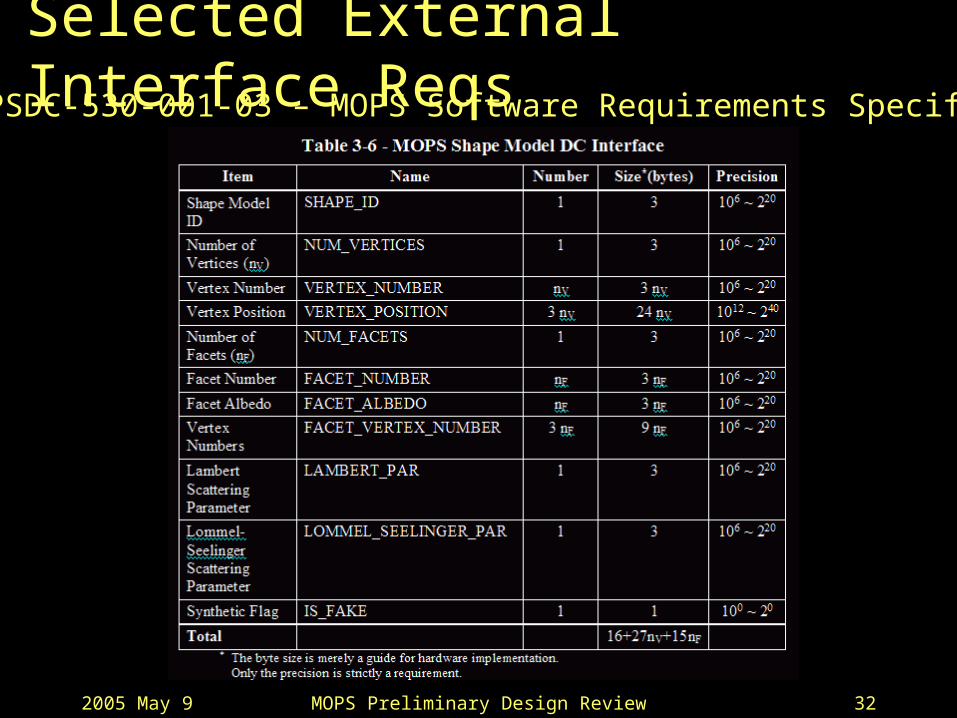
2005 May 9 MOPS Preliminary Design Review 32
Selected External Interface Reqs(from PSDC-530-001-03 – MOPS Software Requirements Specification)

2005 May 9 MOPS Preliminary Design Review 33
Selected External Interface Reqs(from PSDC-530-001-03 – MOPS Software Requirements Specification)
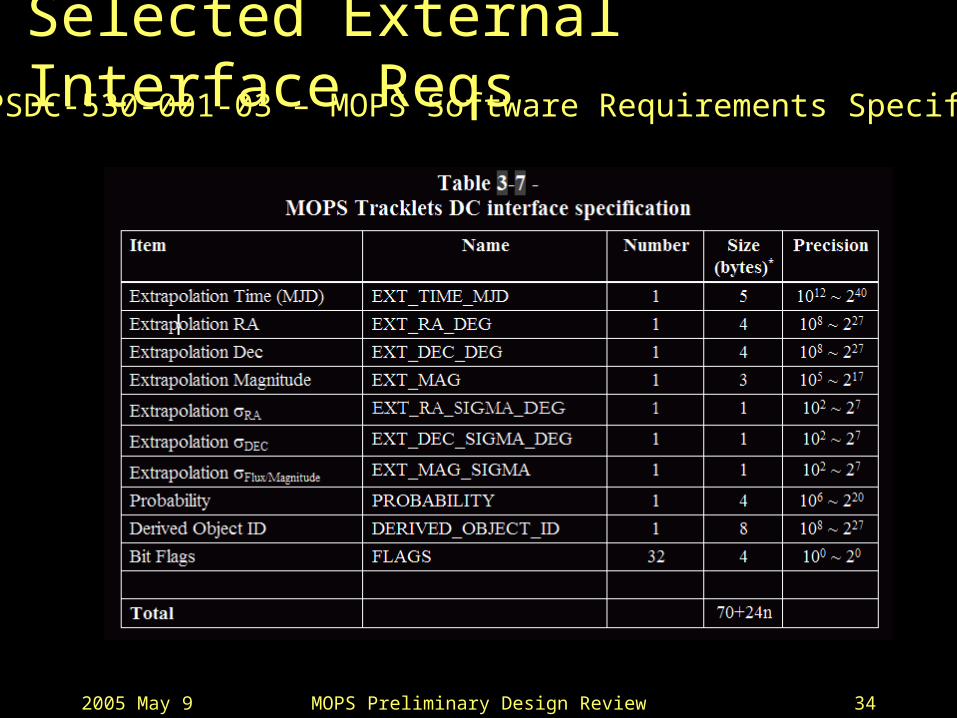
2005 May 9 MOPS Preliminary Design Review 34
Selected External Interface Reqs(from PSDC-530-001-03 – MOPS Software Requirements Specification)
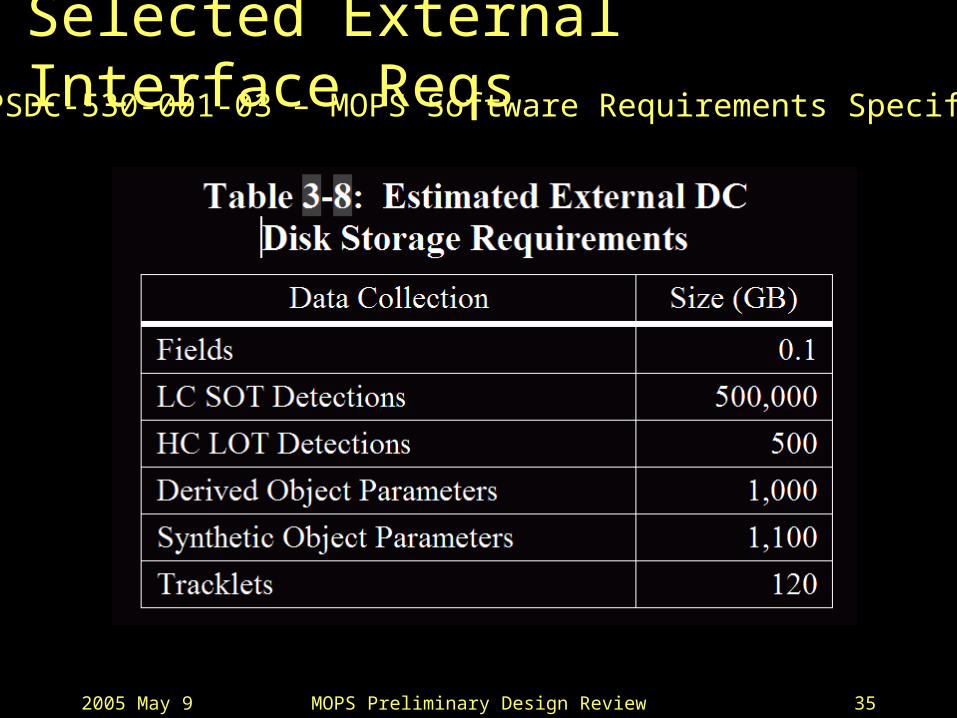
2005 May 9 MOPS Preliminary Design Review 35
Selected External Interface Reqs(from PSDC-530-001-03 – MOPS Software Requirements Specification)

2005 May 9 MOPS Preliminary Design Review 36
Other Important Requirements
• Supplementary requirements on other Pan-STARRS sub-systems in order that MOPS may meet its primary requirements

2005 May 9 MOPS Preliminary Design Review 37
Other Important Requirements(from PSDC-530-001-03 – MOPS Software Requirements Specification)
3.10.1.1.2 Efficiency parameterizationThe MOPS requires a measure of the detection efficiency (3.10.1.1.1) in each image for identifying SOTs (asteroids and comets) as a function of their magnitude and rate of motion.

2005 May 9 MOPS Preliminary Design Review 38
Other Important Requirements(from PSDC-530-001-03 – MOPS Software Requirements Specification)
3.10.1.2.1 Nearly stationary moving objectsThe search algorithm for single occurrence detections of moving objects with a stellar stationary PSF (e.g. ASTEROIDS) in PS-1 images shall have a detection efficiency (3.10.1.1.1) of >99% efficient for R24 magnitude detections moving at <1o/day.
3.10.1.2.2 Rapidly moving objectsThe search algorithm for single occurrence detections of moving objects with a stellar stationary PSF (e.g. ASTEROIDS) in PS-1 images shall have a detection efficiency (3.10.1.1.1) of >98% for R24 magnitude detections moving at 1o/day and <5o/day.

2005 May 9 MOPS Preliminary Design Review 39
Other Important Requirements(from PSDC-530-001-03 – MOPS Software Requirements Specification)
3.10.1.3.1 Nearly stationary moving objectsThe search algorithm for single occurrence detections of moving objects with a non-stellar stationary PSF (e.g. COMETS) in PS-1 images shall have a detection efficiency (3.10.1.1.1) of >98% for R24 magnitude detections moving at <1o/day.
13.10.1.3.2 Rapidly moving objectsThe search algorithm for single occurrence detections of moving objects with a non-stellar stationary PSF (e.g. COMETS) in PS-1 images shall have a detection efficiency (3.10.1.1.1) of >95% efficient for R24 magnitude detections moving at 1o/day and <5o/day.

2005 May 9 MOPS Preliminary Design Review 40
Other Important Requirements(from PSDC-530-001-03 – MOPS Software Requirements Specification)
3.10.1.5 Astrometric accuracyAstrometry of moving objects reported to the MOPS shall be no worse than 150% of the accuracy for stationary objects of the same integrated flux.
3.10.1.7 Photometric accuracySolar system object photometry reported to the MOPS shall be no worse than 150% of the accuracy for stationary objects of the same integrated flux.
2005 May 9 MOPS Preliminary Design Review 41
Unlisted Important Requirement
N.N.N Scanning ModeAll PS survey fields shall be acquired as two pairs of images separated by a TTI±50%.
2005 May 9 MOPS Preliminary Design Review 42
Top-Level MOPS Architecture
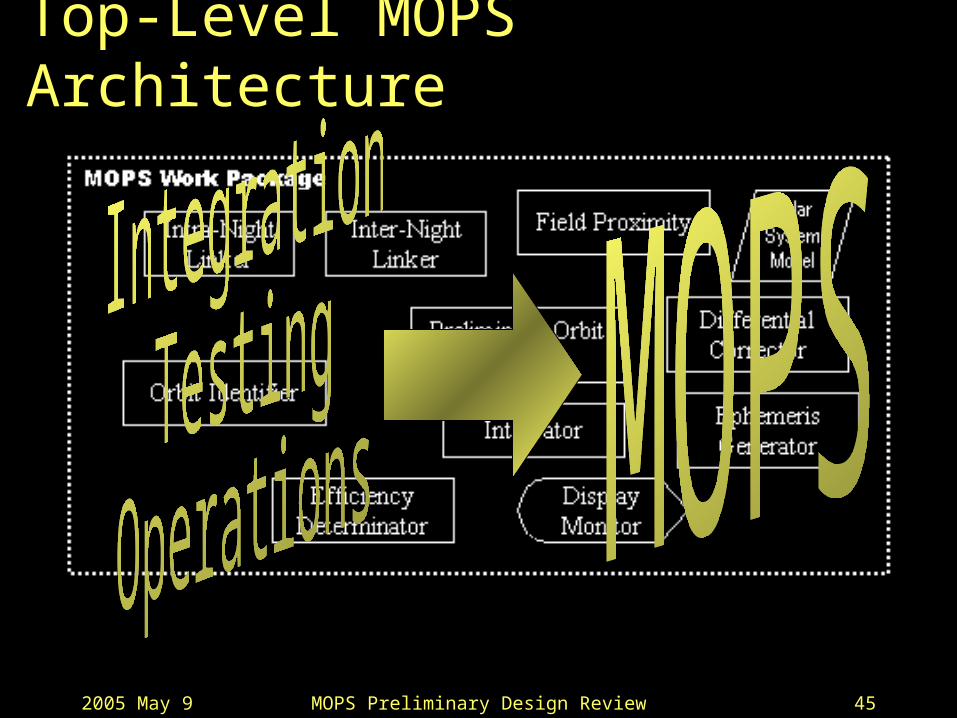
• Designed to meet MOPS requirements
• Designed to determine if MOPS meets requirements

2005 May 9 MOPS Preliminary Design Review 43
Top-Level MOPS Architecture

2005 May 9 MOPS Preliminary Design Review 44
Top-Level MOPS Architecture
2005 May 9 MOPS Preliminary Design Review 45
Top-Level MOPS Architecture

2005 May 9 MOPS Preliminary Design Review 46
Algorithms - Overview
• Necessary and sufficient algorithms so that MOPS may meet its primary requirements

2005 May 9 MOPS Preliminary Design Review 47
Algorithms - Overview
• PSDC-500-003 ‘The TAO of MOPS’– Solar System Survey Simulator (SSSS)
• PSDC-500-004 ‘The MOPS Solar System Model’ – Solar System Model (SSM)
• PSDC-530-002 ‘Algorithm Design Description’– MOPS Algorithms (ADD)

2005 May 9 MOPS Preliminary Design Review 48
Algorithms – SS Survey Simulator
• NOT necessary to MOPS function
• critical for MOPS testing and preliminary design
• critical for preliminary determination of Pan-STARRS solar system surveying strategy to meet primary requirements

2005 May 9 MOPS Preliminary Design Review 49
Algorithms – SS Survey Simulator
• Realistic simulated surveying of opposition and sweet-spot fields
• Define opposition-centric ecliptic field locations and let scheduler schedule images on each night
• ‘simple’ weather model– Random 25% of entire nights are not usable

2005 May 9 MOPS Preliminary Design Review 50
Algorithms – SS Survey Simulator
• TAO (Tools for Automated Observing)http://pan-starrs.ifa.hawaii.edu/project/MOPS/tao.html
• Efficiently schedules observations of fields subject to constraints on:– Number of images of each field (2)– Minimum survey altitude (20o)– Moon avoidance angle (45o)– Exposure time (30s)– Maximum Sun altitude (-15o)– Dome slew rate (5o/s)– telescope slew rate (5o/s)– Telescope settle time (0s)– Readout time (5s)

2005 May 9 MOPS Preliminary Design Review 51
Algorithms – SS Survey Simulator

2005 May 9 MOPS Preliminary Design Review 52
Algorithms – SS Survey Simulator

2005 May 9 MOPS Preliminary Design Review 53
Algorithms – SS Survey Simulator
Opposition660 fields
~4,360 deg2
Evening/Morning sweet-spots84 fields each
~550 deg2 each
TOTAL828 fields
~5,460 deg2
828 fields2 visits/night
3(4) nights/OC 40s/visit
=55(74) hours/OC
=6(8) nights/OC
Ecliptic Longitude w.r.t. Opposition
Ecl
ipti
c La
titu
de

2005 May 9 MOPS Preliminary Design Review 54
Algorithms – SS Survey Simulator

2005 May 9 MOPS Preliminary Design Review 55
Algorithms – SS Survey Simulator
• TAO schedules fields on a single night
• MOPS requires coordinated surveying within a lunation
develop wrapper Perl script to handle ‘weather’ and multi-night requirements

2005 May 9 MOPS Preliminary Design Review 56
Algorithms – SS Survey Simulator• four separate regions:
– 2 sweet spots– 'high‘ and 'low' opposition region
• all surveying takes place between -8 and +8 days from new moon
• each (moving) field is visited 3 times per lunation• minimum time between re-visits
to the same region is 4 nights• to avoid the crescent moon
– evening sweet spot must be completed by day +4 wrt new moon
– morning sweet spot must start after day -3 wrt new moon

2005 May 9 MOPS Preliminary Design Review 57
Algorithms – SS Survey Simulator
• sweet spots are given higher priority than opposition regions
• high opposition region has higher priority than the low region.
• the two sweet spots may be scheduled on the same night but if a sweet spot is scheduled no opposition region can be covered
• only one of the opposition regions may be covered on any night

2005 May 9 MOPS Preliminary Design Review 58
Algorithms – SS Survey Simulator
2005 May 9 MOPS Preliminary Design Review 59
Algorithms – SS Survey Simulator
• We will test effect of different survey strategies on meeting MOPS requirements:
– RegionsOpp only, SS only and ALL
– TTI15min and 30min
– Altitude surveying constraints (20o, 30o, 42o)
– nights/region (each night is 2 visits) 3 or 4

2005 May 9 MOPS Preliminary Design Review 60
Algorithms – SS Survey Simulator

2005 May 9 MOPS Preliminary Design Review 61
Algorithms – SS Survey Simulator

2005 May 9 MOPS Preliminary Design Review 62
Algorithms – SS Survey Simulator
Evenin
g S
S
Opposi
tion
Morn
ing S
S
2005 May 9 MOPS Preliminary Design Review 63
Algorithms – SS Survey Simulator
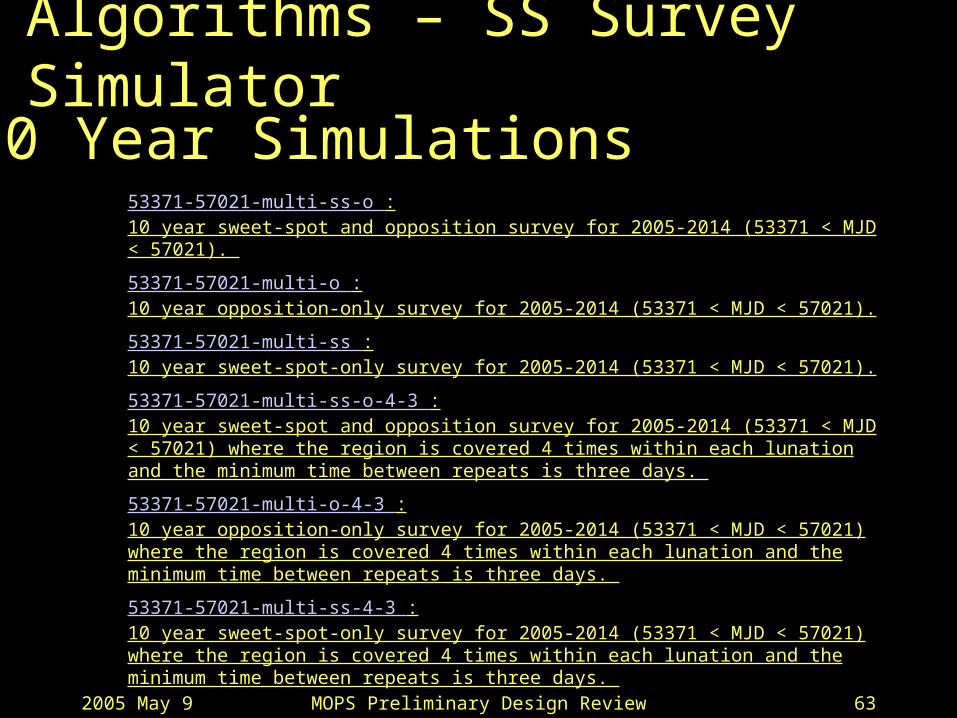
53371-57021-multi-ss-o :10 year sweet-spot and opposition survey for 2005-2014 (53371 < MJD < 57021).
53371-57021-multi-o :10 year opposition-only survey for 2005-2014 (53371 < MJD < 57021).
53371-57021-multi-ss :10 year sweet-spot-only survey for 2005-2014 (53371 < MJD < 57021).
53371-57021-multi-ss-o-4-3 :10 year sweet-spot and opposition survey for 2005-2014 (53371 < MJD < 57021) where the region is covered 4 times within each lunation and the minimum time between repeats is three days.
53371-57021-multi-o-4-3 :10 year opposition-only survey for 2005-2014 (53371 < MJD < 57021) where the region is covered 4 times within each lunation and the minimum time between repeats is three days.
53371-57021-multi-ss-4-3 :10 year sweet-spot-only survey for 2005-2014 (53371 < MJD < 57021) where the region is covered 4 times within each lunation and the minimum time between repeats is three days.
10 Year Simulations

2005 May 9 MOPS Preliminary Design Review 64
Algorithms – Solar System Model
• Integral and essential element of MOPS
• Critical for development

2005 May 9 MOPS Preliminary Design Review 65
Algorithms – Solar System Model
• To test MOPS performance we require a realistic model of the solar system’s small bodies
• Test system before data becomes available
• Run SSM through the MOPS in parallel with the real data
• Verify how well we meet requirements

2005 May 9 MOPS Preliminary Design Review 66
Algorithms – Solar System Model
• Measure real-time efficiency of individual components– FindTracklets– LinkTracklets– Orbit Determination– Orbit Identification– Orbit Contamination

2005 May 9 MOPS Preliminary Design Review 67
Algorithms – Solar System Model
• All asteroid and comet types Near Earth Objects (NEO) including IEOs Main Belt Objects (MBO) Trojans (TRO) for all planets Centaurs (CEN) Trans-Neptunian Objects (TNO) Scattered Disk Objects (SDO) Short Period Comets (SPC) Long Period Comets (LPC) Oort Cloud Objects (OCO) Extreme objects (EXO)
2005 May 9 MOPS Preliminary Design Review 68
Algorithms – Solar System Model• Synthetic model must match real
distribution of all observable objects detectable by Pan-STARRS
orbit and size distribution shape, rotation periods, pole orientations
+ ‘unusual’ orbits
e.g. hyperbolic interstellar, retrograde main belt, distant Earths, …

2005 May 9 MOPS Preliminary Design Review 69
Algorithms – Solar System Model• Near Earth
Objects (NEO) including IEOs
• ‘Bottke Model’ + Rabinowitz
• 4 dimensional (a,e,i,H)
• From 5 source regions

2005 May 9 MOPS Preliminary Design Review 70
Algorithms – Solar System Model• Near Earth
Objects (NEO) including IEOs
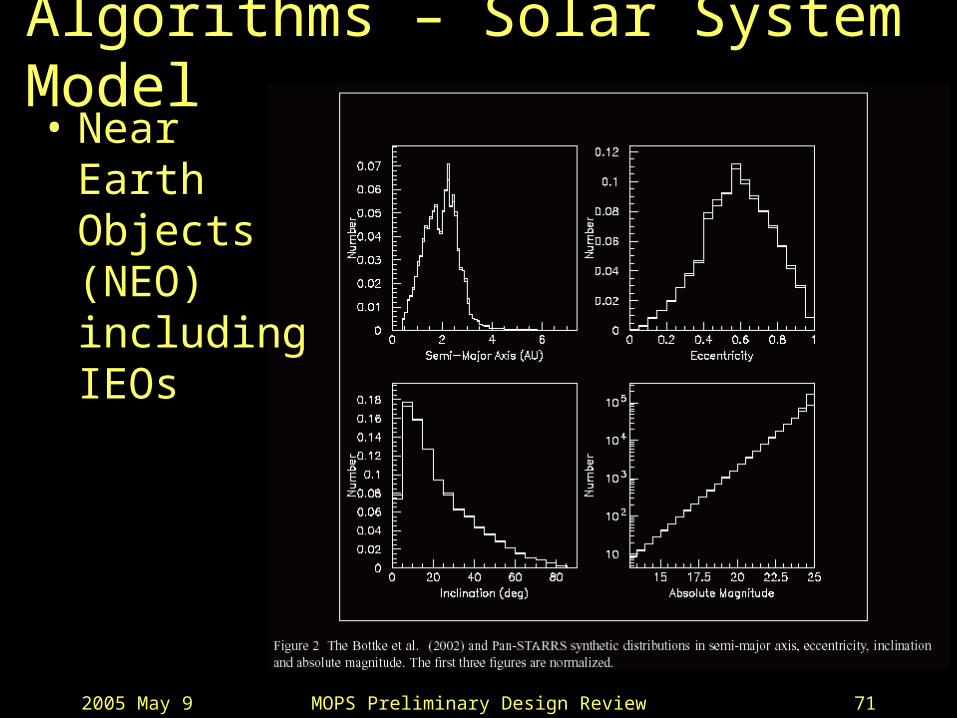
2005 May 9 MOPS Preliminary Design Review 71
Algorithms – Solar System Model• Near Earth
Objects (NEO) including IEOs

2005 May 9 MOPS Preliminary Design Review 72
Algorithms – Solar System Model• Main Belt
Objects (MBO)
• Complete to H~14.5

2005 May 9 MOPS Preliminary Design Review 73
Algorithms – Solar System Model• Main Belt
Objects (MBO)
• Highest statistics population
• Correlations between orbital elements
Difficult to model

2005 May 9 MOPS Preliminary Design Review 74
Algorithms – Solar System Model• Main Belt
Objects (MBO)

2005 May 9 MOPS Preliminary Design Review 75
Algorithms – Solar System Model• Main Belt
Objects (MBO)
• Angular element distributions

2005 May 9 MOPS Preliminary Design Review 76
Algorithms – Solar System Model• Main Belt
Objects (MBO)
• Angular element correlations
2005 May 9 MOPS Preliminary Design Review 77
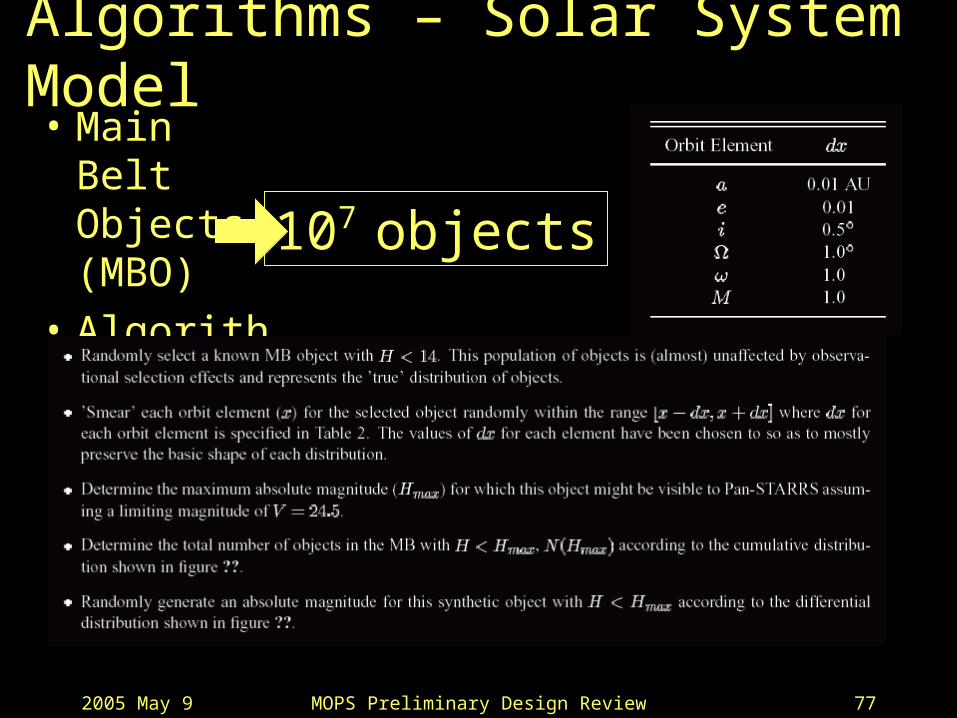
Algorithms – Solar System Model• Main Belt
Objects (MBO)
• Algorithm:
107 objects

2005 May 9 MOPS Preliminary Design Review 78
Algorithms – Solar System Model• Main Belt
Objects (MBO)

2005 May 9 MOPS Preliminary Design Review 79
Algorithms – Solar System Model• Main Belt
Objects (MBO)

2005 May 9 MOPS Preliminary Design Review 80
Algorithms – Solar System Model• Trojans
(TRO) for all planets
• NOT bias corrected

2005 May 9 MOPS Preliminary Design Review 81
Algorithms – Solar System Model
• Trojans (TRO) for all planets
• NOT bias corrected

2005 May 9 MOPS Preliminary Design Review 82
Algorithms – Solar System Model• Trojans (TRO) for all planets
• Semi-major axis, eccentricity, inclination, mean anomaly and longitude of perihelion were randomly generated using the distributions given in table \ref{tab.trojan.fits}.
• The longitude of the node was randomly generated in the range [0o,360o)
• The argument of perihelion was calculated.
• An apparent magnitude was selected using the distribution given in Eq. \ref{eq.trojan.mag.fit} and assumed to be the apparent magnitude at perihelion.
• The absolute magnitude was calculated.
• repeat till 160,000 objects were generated in each trojan cloud.
2005 May 9 MOPS Preliminary Design Review 83
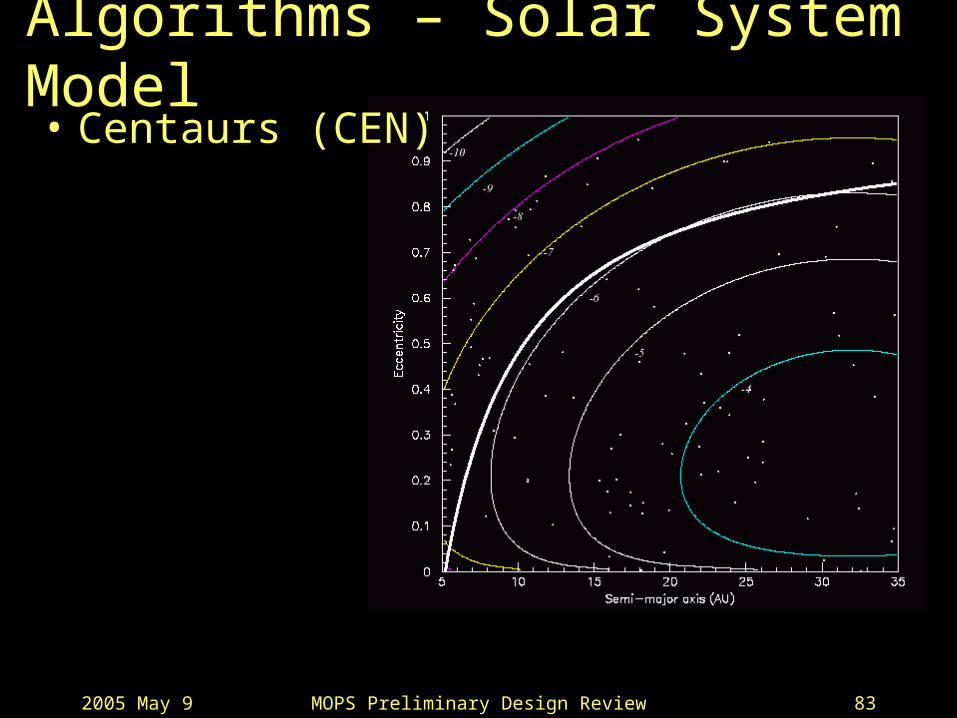
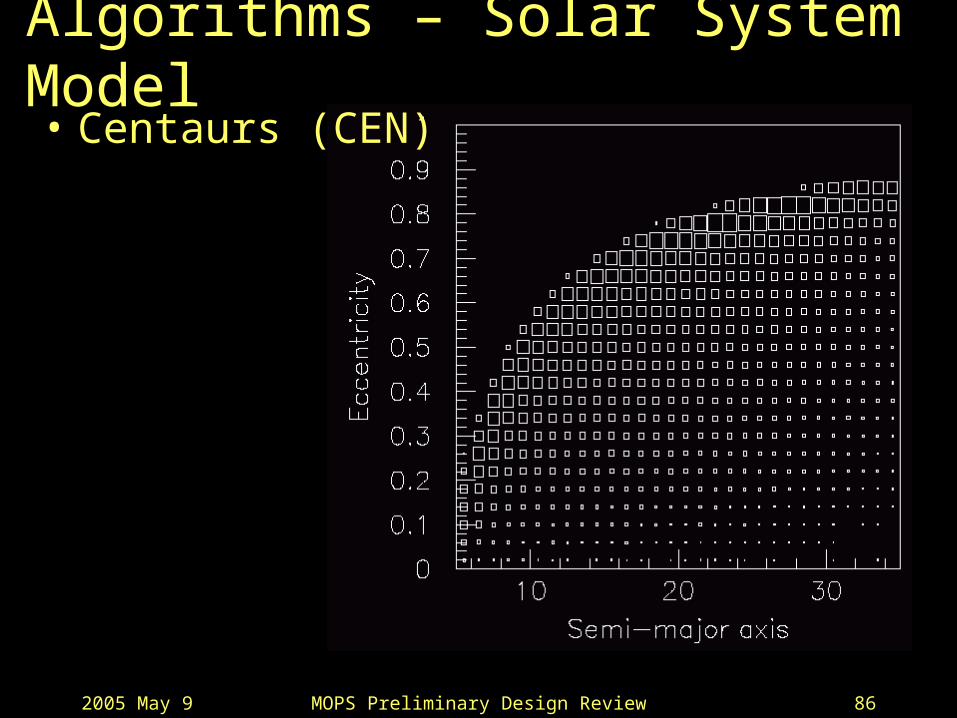
Algorithms – Solar System Model• Centaurs (CEN)

2005 May 9 MOPS Preliminary Design Review 84
Algorithms – Solar System Model• Centaurs (CEN)
2005 May 9 MOPS Preliminary Design Review 85
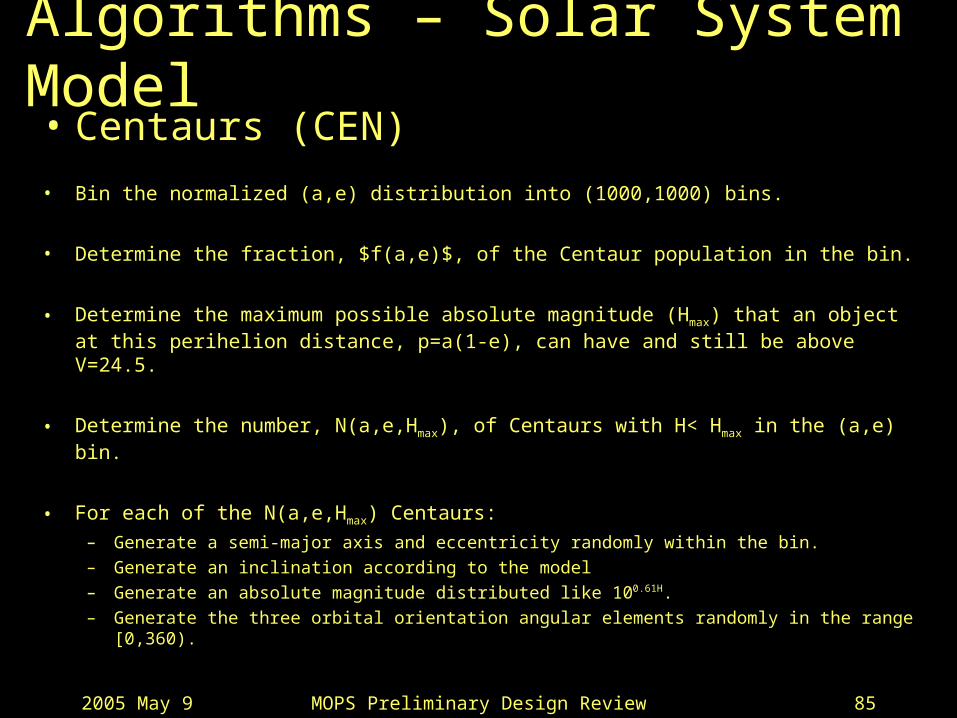
Algorithms – Solar System Model• Centaurs (CEN)• Bin the normalized (a,e) distribution into (1000,1000) bins.
• Determine the fraction, $f(a,e)$, of the Centaur population in the bin.
• Determine the maximum possible absolute magnitude (Hmax) that an object at this perihelion distance, p=a(1-e), can have and still be above V=24.5.
• Determine the number, N(a,e,Hmax), of Centaurs with H< Hmax in the (a,e) bin.
• For each of the N(a,e,Hmax) Centaurs:– Generate a semi-major axis and eccentricity randomly within the bin.– Generate an inclination according to the model– Generate an absolute magnitude distributed like 100.61H.– Generate the three orbital orientation angular elements randomly in the range
[0,360).
2005 May 9 MOPS Preliminary Design Review 86
Algorithms – Solar System Model• Centaurs (CEN)

2005 May 9 MOPS Preliminary Design Review 87
Algorithms – Solar System Model• Trans-Neptunian Objects (TNO)
• we generate a set of orbits that are the results of assumed dynamical processes rather than attempting to model a poorly known population
• model the migration of the outer solar system into a near planar disk of small bodies
• started with ~10,000 objects in a disk from 15-50 AU. • Number density falls like a-2
• slightly excited eccentricities of 0.,0.025,0.05 • i=0o
• outer planets started at a ~ 5.4,8.5,16.2,23.1 AU and run for 108 years. • forced migration of ~ -0.15, 1.0, 3.0, 7.0 AU 5M years
• synthetic objects for our solar system model are time snapshots of the surviving objects corrected for orbital position w.r.t. Neptune.

2005 May 9 MOPS Preliminary Design Review 88
Algorithms – Solar System Model• Trans-Neptunian Objects (TNO)

2005 May 9 MOPS Preliminary Design Review 89
Algorithms – Solar System Model• Trans-Neptunian Objects (TNO)
2005 May 9 MOPS Preliminary Design Review 90
Algorithms – Solar System Model• Scattered Disk Objects (SDO)• Randomly pick perihelion distance from the bias-corrected distribution in the range [27,45] AU.
• Randomly pick the eccentricity from the bias-corrected distribution in the range [0.2,1.)
• Calculate the semi-major axis and if a>500 AU re-pick q and e.
• Randomly pick the inclination from the bias-corrected distn in the range [0o,90o] AU.
• Randomly generate the three orbital angles in the range [0o,360o]
• Randomly generate the apparent magnitude from the observed distribution
• Calculate the absolute magnitude assuming the object is at perihelion
• Calculate the apparent magnitudes at the current epoch and once per year for the following 10 years. If the apparent magnitude becomes brighter than m=24.5 the object is observable by Pan-STARRS and included in the synthetic population.
• Repeat the procedure until a total of 20,158 objects are generated in the synthetic population

2005 May 9 MOPS Preliminary Design Review 91
Algorithms – Solar System Model• Scattered Disk Objects (SDO)• Rough bias correction
KNOWN
DEBIASED
FIT
SYNTHETIC

2005 May 9 MOPS Preliminary Design Review 92
Algorithms – Solar System Model• Scattered Disk Objects (SDO)• Rough bias correction
KNOWN
DEBIASED
FIT
SYNTHETIC

2005 May 9 MOPS Preliminary Design Review 93
Algorithms – Solar System Model• Short Period Comets (SPC) &
Long Period Comets (LPC)• NOT bias corrected
• Synthetic (q,e,i) created from fit to observed (q,e,i)
• Angles generated randomly• N(>R) ~ e0.04(R-24.5)
• Test if object becomes visible to Pan-STARRS in 10 years
• Repeat till 10,000 objects are generated

2005 May 9 MOPS Preliminary Design Review 94
Algorithms – Solar System Model• Short Period Comets (SPC)
KNOWN
FIT
SYNTHETIC

2005 May 9 MOPS Preliminary Design Review 95
Algorithms – Solar System Model• Long Period Comets (LPC)
KNOWN
FIT
SYNTHETIC
2005 May 9 MOPS Preliminary Design Review 96
Algorithms – Solar System Model• Extreme objects (EXO)
• Grid objects (e.q. evenly spaced objects in an a,e,i grid).
• Oort cloud objects and giant distant planets
• Extended inner earth objects• Retrograde main belt objects• Interstellar interlopers
To be implemented

2005 May 9 MOPS Preliminary Design Review 97
Algorithms – Solar System Model• Shapes, Rotation periods & poles
• Still TBD but…
We have H for each synthetic objectGenerate albedoDetermine sizeGenerate matching triaxial ellipsoidsGenerate pole directionGenerate rotation period

2005 May 9 MOPS Preliminary Design Review 98
Algorithms – Solar System Model• Summary:
• To develop AND test MOPS performance we require a realistic model of the solar system’s small bodies
• Test system before data becomes available
• Run SSM through the MOPS in parallel with the real data
• Verify how well we meet requirements

2005 May 9 MOPS Preliminary Design Review 99
Algorithms – ADD
• Other algorithms necessary for MOPS to meet its requirements

2005 May 9 MOPS Preliminary Design Review 100
Algorithms - ADD
• Algorithm Design Description (ADD)– Multiple hypothesis testing– kd-trees – Initial Orbit Determination (IOD) – Differential Orbit Determination (OD) – Ephemeris Generation – Shape Modelling – Photometric Models

2005 May 9 MOPS Preliminary Design Review 101
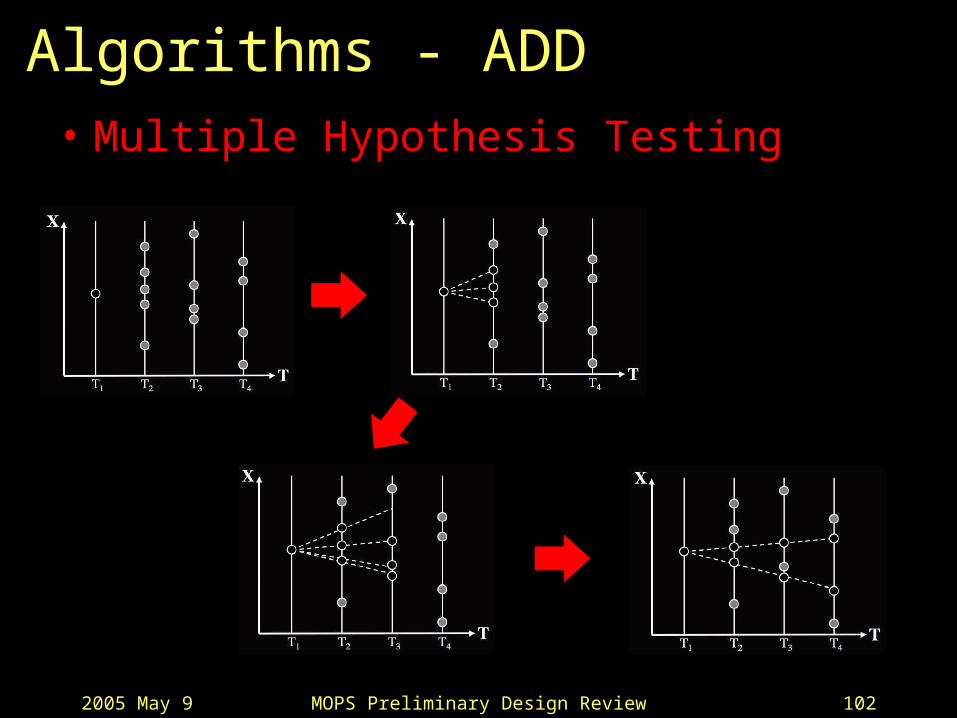
Algorithms - ADD• Multiple Hypothesis Testing• A combinatoric problem in which
many different possible hypotheses must be tested for consistency with a model– Linking detections (FindTracklets)– Linking tracklets (LinkTracklets)– Field detections (FieldProximity)– Orbit identification (OrbitProximity)
2005 May 9 MOPS Preliminary Design Review 102
Algorithms - ADD• Multiple Hypothesis Testing

2005 May 9 MOPS Preliminary Design Review 103
Algorithms - ADD• kd-trees • The kd-tree algorithm may be thought
of as a traditional binary search extended to a k-dimensional space (hence the name). It dramatically reduces the number of computations, and therefore speeds the search time, for an entry in a k-d table meeting specified requirements. The algorithm will be employed at multiple stages within MOPS processing

2005 May 9 MOPS Preliminary Design Review 104
Algorithms - ADD

2005 May 9 MOPS Preliminary Design Review 105
Algorithms - FieldProximity•Given: coarse UT 0h
ephemerides for several nights and fields acquired on a single night
•Want: which objects are in which fields, within some slop radius
•Brute force: for each field (up to 1000), interpolate every orbit and calculate which ones intersect the field+slop radius
•KD-Tree: create a RA/DEC/time index for the field locations, and for each orbit, traverse the tree to find nearby fields

2005 May 9 MOPS Preliminary Design Review 106
Algorithms - FindTracklets•Given: 3000 HC
detections in a field
•Want: pairs/tuples of close detections in time/space
•Brute force: combinatorically find all pairs of “close objects” in time and space among thousands of detections
•KD-Tree: create a RA/DEC/time index of detection locations, and search tree for close detections

2005 May 9 MOPS Preliminary Design Review 107
Algorithms - LinkTracklets
•Given: many thousands of tracklets from three nights
•Want: all viable combinations of tracklets that are viable tracks (linear or quadratic in sky-plane motion)
•Brute force: combinatorically examine all tuples of tracklets and select viable ones
•KD-Tree: create a RA/DEC/time index of tracklet locations, and search tree according to estimated velocity of tracklets

2005 May 9 MOPS Preliminary Design Review 108
Algorithms - OrbitProximity•Given: 10 million derived
orbits, hundreds or thousands of proposed orbits
•Want: which proposed orbits are very similar to derived orbits
•Brute force: manually compare orbital elements for each proposed orbit against every derived orbit
•KD-Tree: index the derived orbits in six dimensions, and look up proposed orbits in this index

2005 May 9 MOPS Preliminary Design Review 109
Algorithms - ADD• kd-trees
2005 May 9 MOPS Preliminary Design Review 110
Algorithms - ADD• Initial Orbit Determination (IOD)• When no pre-existing orbit exists for a set
of detections an initial orbit may be determined assuming that there are only two gravitationally interacting bodies in the solar system - the Sun and the detected object. The calculation of the 2-body orbit (with six free parameters) from at least 3 angles-only (RA, Dec) detections provides an initial estimate of the osculating orbit elements for the object.

2005 May 9 MOPS Preliminary Design Review 111
Algorithms - ADD• Initial Orbit Determination (IOD)
Temporarily provided by 3rd party SW- FindOrb- gorbit- knobso
Developing internal IOD based on JPL SW

2005 May 9 MOPS Preliminary Design Review 112
Algorithms - ADD• Differential Orbit Determination (OD)• Once the IOD exists for a set of
detections it is possible to improve the orbit elements in the sense of minimizing the residual between the actual and predicted positions for the object. The procedure by which the orbit is fit to the detections is known as differentially correcting the orbit.

2005 May 9 MOPS Preliminary Design Review 113
Algorithms - ADD• Differential Orbit Determination (OD)
2005 May 9 MOPS Preliminary Design Review 114
Algorithms - ADD• Ephemeris Generation (EPHEM)• Given an orbit (with associated error
estimates on the elements) and time and location of observation it is possible to predict the apparent position of the object on that orbit. The set of predicted observed parameters (perhaps including brightness, position, distance, rate of motion, etc.) is known as an ephemeris.

2005 May 9 MOPS Preliminary Design Review 115
Algorithms - ADD• Ephemeris Generation (EPHEM)
2005 May 9 MOPS Preliminary Design Review 116
Algorithms - ADD• OD & EPHEM

2005 May 9 MOPS Preliminary Design Review 117
Algorithms - ADD• Shape Modelling • A method of describing the shape of
a 3-d convex body based on triangular facets.
• Accurately modelling light curve variations allows MOPS to assess it’s efficiency and ability to meet primary requirements

2005 May 9 MOPS Preliminary Design Review 118
Algorithms - ADD• Shape Modelling

2005 May 9 MOPS Preliminary Design Review 119
Algorithms - ADD• Photometric Models
• A method of predicting the brightness of objects– Asteroids– Comets
• Two techniques– Simple (H & G)– Complex (from shape model)

2005 May 9 MOPS Preliminary Design Review 120
Algorithms - ADD• Photometric Models
– Simple (H & G)

2005 May 9 MOPS Preliminary Design Review 121
Algorithms - ADD• Photometric Models
• Complex (from shape model)
– Shape: Each object will be described as a 3 dimensional polyhedron with any number of triangular facets, and corresponding vertices. Most synthetic objects will be triaxial ellipsoid converted to corresponding convex shapes, but a subset of the largest objects will have more complex and realistic shapes.
2005 May 9 MOPS Preliminary Design Review 122
Algorithms - ADD• Photometric Models
• Complex (from shape model)
– Albedo: each of the facets has an albedo parameter that defines how much of the light coming from the Sun is reflected. Usually all the facets will have the same albedo value.

2005 May 9 MOPS Preliminary Design Review 123
Algorithms - ADD• Photometric Models
• Complex (from shape model)
– Spin state: given as pole direction in ecliptic coordinates and the sidereal period.

2005 May 9 MOPS Preliminary Design Review 124
Algorithms - ADD• Photometric Models
• Complex (from shape model)
– Orbital state: gives the position of the asteroid with respect to the Sun and the observer.
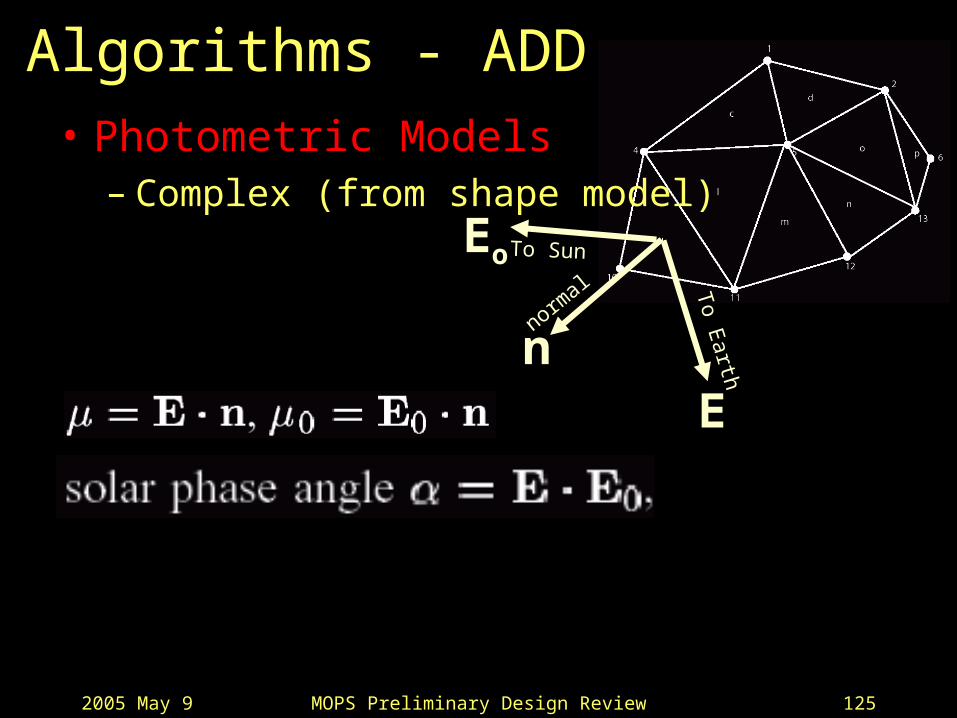
2005 May 9 MOPS Preliminary Design Review 125
Algorithms - ADD• Photometric Models
– Complex (from shape model)
n
Eo
E
To E
arth
To Sun
norm
al
2005 May 9 MOPS Preliminary Design Review 126
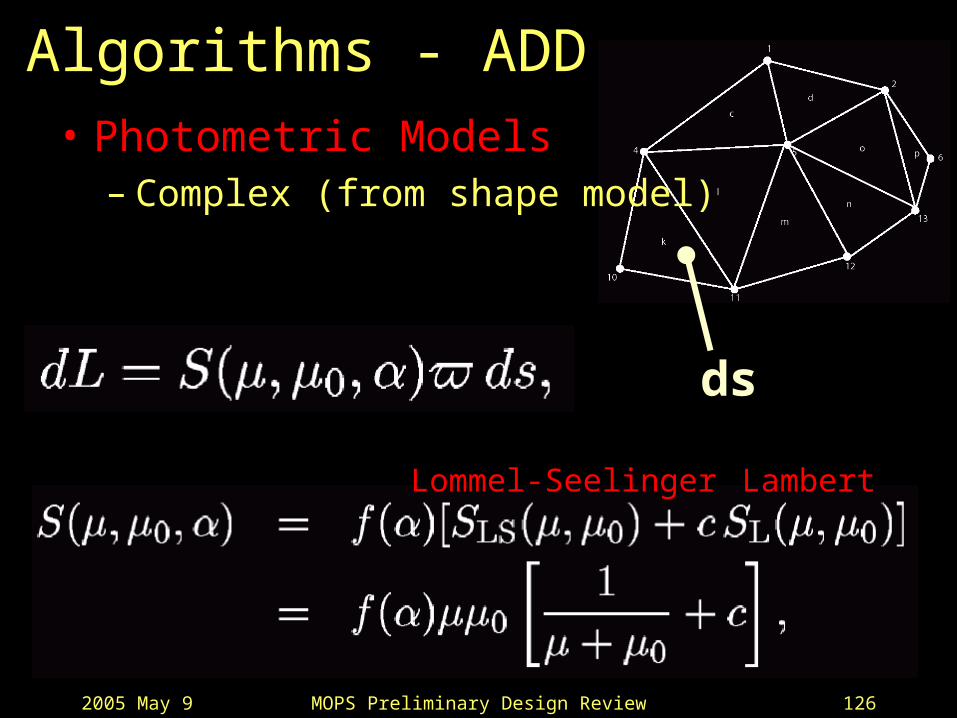
Algorithms - ADD• Photometric Models
– Complex (from shape model)
ds
LambertLommel-Seelinger

2005 May 9 MOPS Preliminary Design Review 127
Algorithms - ADD• Photometric Models
– Complex (from shape model)
• For the sake of convenient inversion, the phase function multiplies the sum of the single and multiple scattering terms.
• An exponential and linear model is a versatile choice for this purpose.
• a and d are the amplitude and scale length of the opposition effect, and k is the overall slope of the phase curve .

2005 May 9 MOPS Preliminary Design Review 128
Algorithms - ADD• Photometric Models
– Complex (from shape model)
where r and are the object’s distance from the Sun and observer, respectively, and H is an offset magnitude to ensure the object has the proper HM(1,1,0).
2005 May 9 MOPS Preliminary Design Review 129
Algorithms - ADD• Photometric Models
– Complex (from shape model)

2005 May 9 MOPS Preliminary Design Review 130
Algorithms - ADD• Photometric Models
– comets

2005 May 9 MOPS Preliminary Design Review 131
Software Design: Overview
• Software must be designed to allow MOPS to meet its primary requirements
• Must be designed within existing framework, be consistent with IPP and PSPS operations.
• Must be designed within budget constraints

2005 May 9 MOPS Preliminary Design Review 132
Software Design: Overview
• Databases• Software Subsystems• Incorporation of 3rd party software• Hardware Implementation

2005 May 9 MOPS Preliminary Design Review 133
Software Design: Overview
• MOPS-wide design decisions• Architectural design components• Detailed design decisions
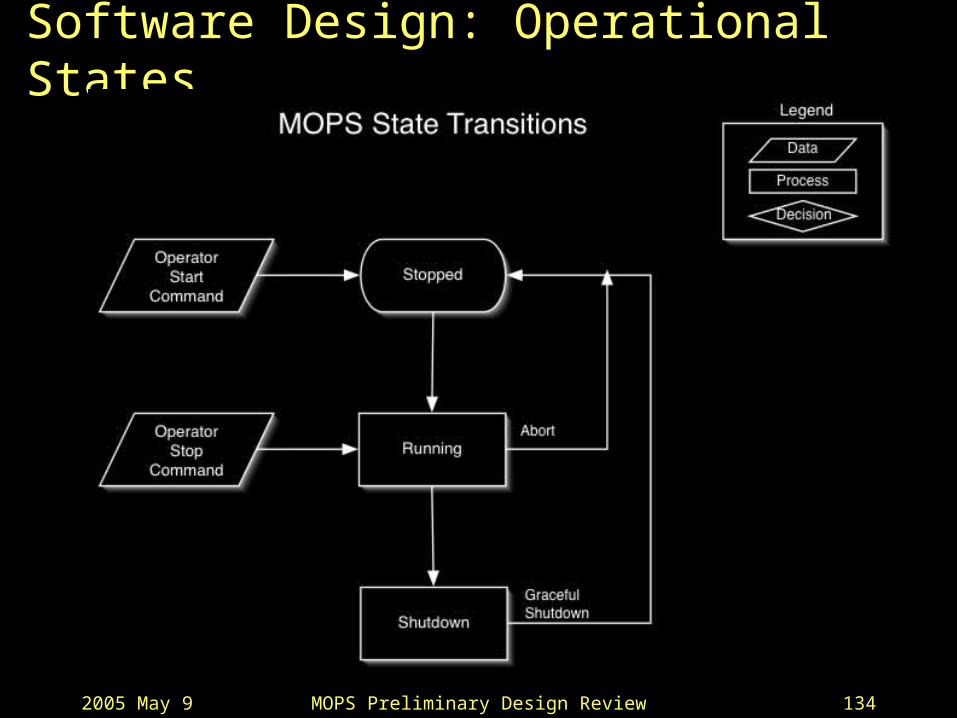
2005 May 9 MOPS Preliminary Design Review 134
Software Design: Operational States

2005 May 9 MOPS Preliminary Design Review 135
Software Design: I/O• INPUT (DIRECT)
– IPP metadata and detections data
• INPUT (INDIRECT)– JPL position and velocities and orbits– MPC detections and orbits– Shapes, poles, spin rates from other sources
• OUTPUT– MOPS will provide running output of its processing so
that instantaneous status and efficiency can be internally monitored
– Push output to the PSPS– Push detections to the MPC, JPL, AstDys
2005 May 9 MOPS Preliminary Design Review 136
Software Design: Data Collections
• There is no external access to internal MOPS data collections.
• All user access to moving object data will be through the PSPS

2005 May 9 MOPS Preliminary Design Review 137
Software Design: Atomicity

2005 May 9 MOPS Preliminary Design Review 138
Software Design: Atomicity

2005 May 9 MOPS Preliminary Design Review 139
Software Design: Availability
• The MOPS design will allow for 97% uptime (four hours/week downtime).
• The MOPS pipelines will execute continuously.
• All MOPS internal status changes will be effected via atomic operations.
2005 May 9 MOPS Preliminary Design Review 140
Software Design: Components
• Two independent pipelines– Detections and Tracklets– Linking and Orbit Determination
• MOPS components are divided into – execution units
• perform discrete blocks of processing and/or calculation
– class modules• encapsulate business logic to represent and
manipulate MOPS fundamental concepts such as fields (metadata), detections, tracklets and derived objects.
2005 May 9 MOPS Preliminary Design Review 141
Software Design: Components
• Detection and Tracklet Controller • Linking and Orbit Determination Controller • Orbit Determination
– Initial Orbit Determination – Differential Corrector
• Ephemeris Generator • FieldProximity • FindTracklets • LinkTracklets • OrbitProximity

2005 May 9 MOPS Preliminary Design Review 142
Software Design: Components
• MOPS Internal Database • Fields DC • Low Confidence SOT DC • High Confidence SOT DC • Tracklets DC • Derived Objects DC • Synthetic Objects DC • Shape Model • Efficiency Determinator • Graphical User Interface

2005 May 9 MOPS Preliminary Design Review 143
Software Design: Components
• Detection and Tracklet Controller(DTCTL)– a program representable as a finite state machine that will
be responsible for controlling the execution of the Detection and Tracklet pipeline.

2005 May 9 MOPS Preliminary Design Review 144
Software Design: Components
• MOPS Internal Database(PSMOPS + LCSOT)– consists of definitions, templates, driver software, utility
software, interface software and configuration files related to the operation of the database housing the MOPS data collections.

2005 May 9 MOPS Preliminary Design Review 145
Software Design: Components
• MOPS Internal Database(PSMOPS)– The MOPS will maintain its own copy of all data
collections relevant to MOPS operation and will push results to PSPS.

2005 May 9 MOPS Preliminary Design Review 146
Software Design: Components
• Fields DC(FIELDSDC)– consists of database table definitions and interface code
to query and manipulate the contents of the MOPS Fields (IPP Metadata) data collection.

2005 May 9 MOPS Preliminary Design Review 147
Software Design: Components
• Low Confidence and High Confidence SOT DCs (LCSOTDC and HCSOTDC)– consists of database table definitions and interface code to
query and manipulate the contents of the MOPS Metadata Low-Confidence and High-Confidence data collections.

2005 May 9 MOPS Preliminary Design Review 148
Software Design: Components
• Tracklets DC(TRACKLETSDC)– consists of database table definitions and
interface code to query and manipulate the contents of the MOPS Tracklets data collection.
2005 May 9 MOPS Preliminary Design Review 149
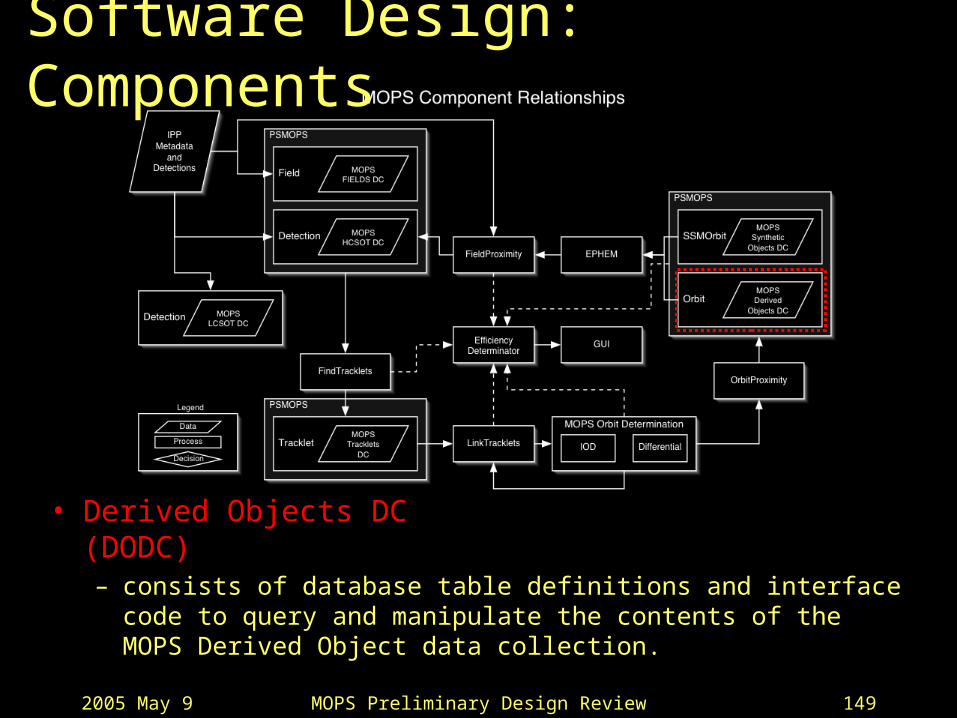
Software Design: Components
• Derived Objects DC(DODC)– consists of database table definitions and interface code
to query and manipulate the contents of the MOPS Derived Object data collection.

2005 May 9 MOPS Preliminary Design Review 150
Software Design: Components
• Synthetic Objects DC(SSMDC)– consists of database table definitions and interface code
to query and manipulate the contents of the MOPS synthetic Solar System Model data collection.

2005 May 9 MOPS Preliminary Design Review 151
Software Design: Components
• Shape Model (SHAPE)– consists of source code, libraries and database table definitions
to calculate magnitudes from a shape model definition, calculate shape models from observed magnitudes (light curves), and query and manipulate the Shape Model DC.

2005 May 9 MOPS Preliminary Design Review 152
Software Design: Components
• FieldProximity– associate large lists of objects with multiple (RA,
DEC and time) coordinates with a smaller list of fields with (RA, DEC, time) coordinates.

2005 May 9 MOPS Preliminary Design Review 153
Software Design: Components
• FindTracklets– will examine an entire set of detections present in a Pan-
STARRS field and return a list of tracklets. A tracklet is a small set (2, 3, or 4 usually) of detections that are close together in RA, DEC and time and are candidates for being the same moving object.

2005 May 9 MOPS Preliminary Design Review 154
Software Design: Components
• LinkTracklets– examine a set of tracklets belonging to multiple nights,
usually during a single observing cycle, and return a list of tracks. A track is a set of tracklets that are candidates for describing the motion of a single moving object.

2005 May 9 MOPS Preliminary Design Review 155
Software Design: Components
• OrbitProximity– given a list of orbits and their orbital
parameters, return a list of similar orbits from a large list of orbits.

2005 May 9 MOPS Preliminary Design Review 156
Software Design: Components
• Ephemeris Generator(EPHEM)– Produce an ephemeris for either a MOPS derived
object or an arbitrary set of six orbital parameters and a magnitude.

2005 May 9 MOPS Preliminary Design Review 157
Software Design: Components
• Linking and Orbit Determination Controller(LODCTL)– a program representable as a finite state machine that will
be responsible for controlling the execution of the Linking and Orbit Determination pipeline.
2005 May 9 MOPS Preliminary Design Review 158
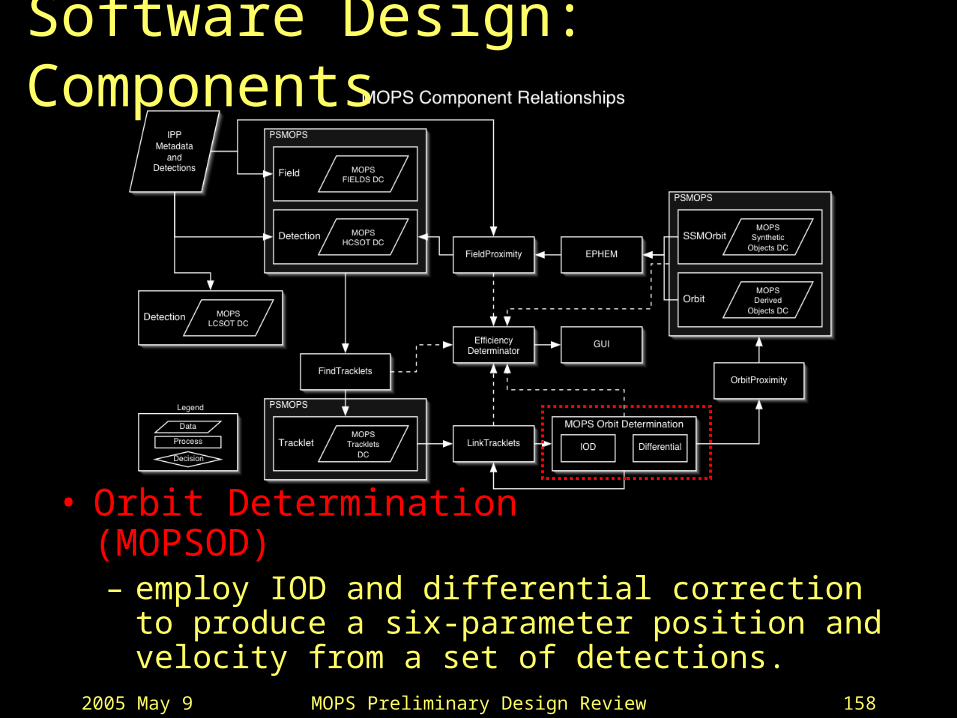
Software Design: Components
• Orbit Determination(MOPSOD)– employ IOD and differential correction to
produce a six-parameter position and velocity from a set of detections.

2005 May 9 MOPS Preliminary Design Review 159
Software Design: Components
• Initial Orbit Determination(IOD)– The IOD module will produce a 2-body approximate orbit
given a set of MOPS detections

2005 May 9 MOPS Preliminary Design Review 160
Software Design: Components
• Differential Corrector(DIFFCOR)– determine a minimum-residual orbit for a
given set of detections.

2005 May 9 MOPS Preliminary Design Review 161
Software Design: Components
• Efficiency Determinator– Repository for routines and data used to assess
real-time and long term MOPS performance.

2005 May 9 MOPS Preliminary Design Review 162
Software Design: Components
• Graphical User Interface(GUI)– consists of all code, static and dynamic web page
definitions and configuration information required to produce the web-based MOPS operator's console.

2005 May 9 MOPS Preliminary Design Review 163
Software Detailed Design: DTCTL
Responsible for
• verifying the presence of new input data,
• dispatching execution units to perform processing,
• verifying successful return codes from execution units.
Operates at a quantum unit of ‘field’
dtctl-tree.eps
2005 May 9 MOPS Preliminary Design Review 164
Software Detailed Design: DTCTL
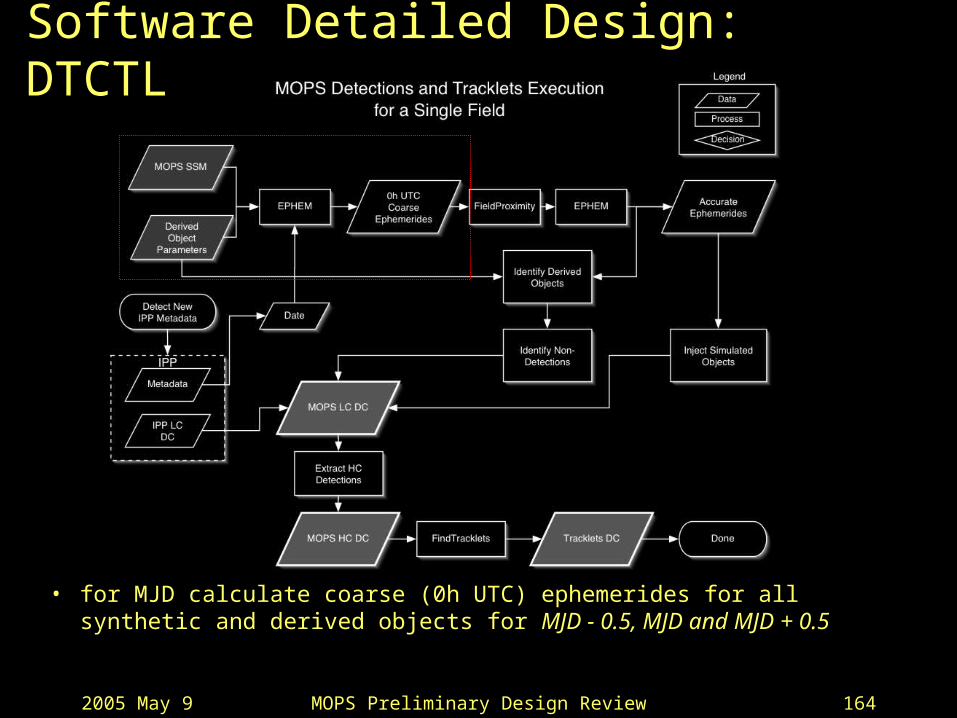
• for MJD calculate coarse (0h UTC) ephemerides for all synthetic and derived objects for MJD - 0.5, MJD and MJD + 0.5

2005 May 9 MOPS Preliminary Design Review 165
Software Detailed Design: DTCTL
• Execute FieldProximity to associate coarse ephemerides with nearby acquired fields for that night.
2005 May 9 MOPS Preliminary Design Review 166
Software Detailed Design: DTCTL
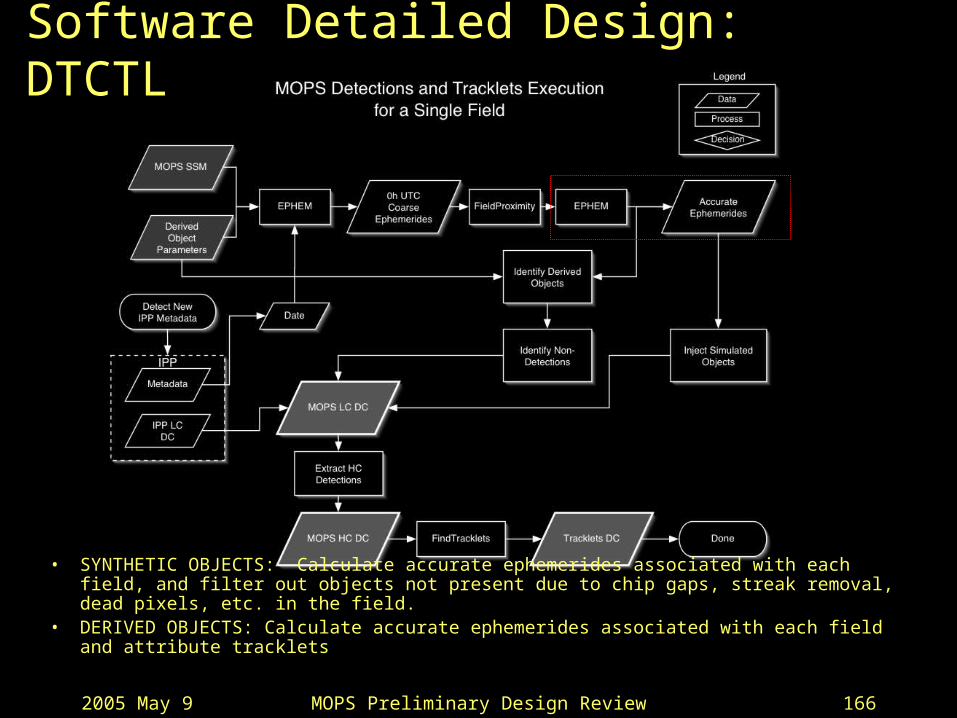
• SYNTHETIC OBJECTS: Calculate accurate ephemerides associated with each field, and filter out objects not present due to chip gaps, streak removal, dead pixels, etc. in the field.
• DERIVED OBJECTS: Calculate accurate ephemerides associated with each field and attribute tracklets
2005 May 9 MOPS Preliminary Design Review 167
Software Detailed Design: DTCTL
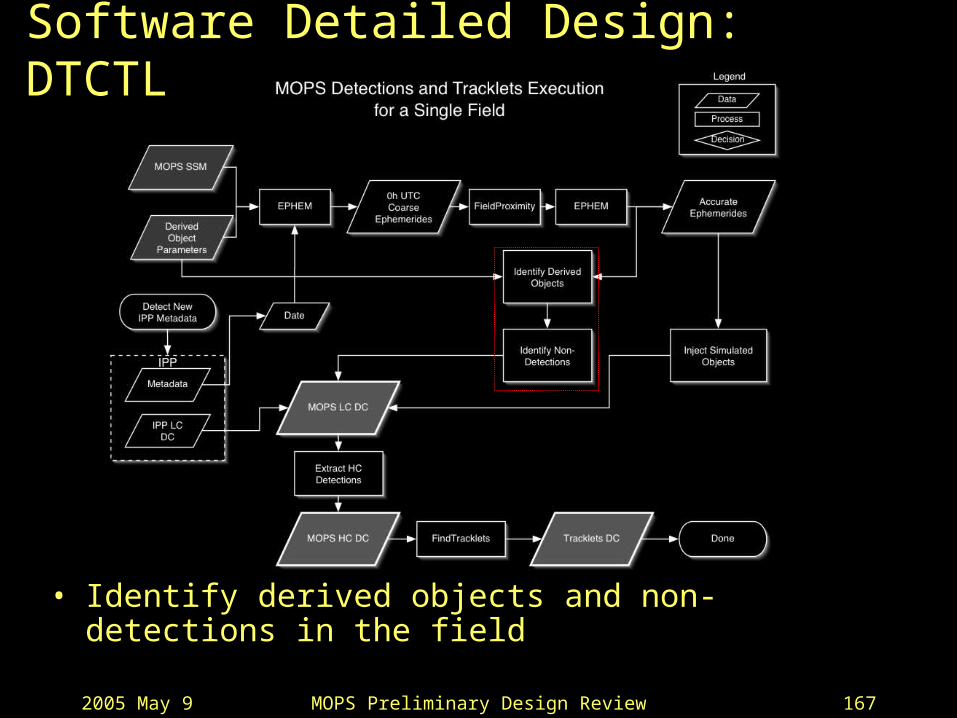
• Identify derived objects and non-detections in the field

2005 May 9 MOPS Preliminary Design Review 168
Software Detailed Design: DTCTL
• Insert synthetic detections

2005 May 9 MOPS Preliminary Design Review 169
Software Detailed Design: DTCTL
• Extract HC detections

2005 May 9 MOPS Preliminary Design Review 170
Software Detailed Design: DTCTL
• Execute FindTracklets on each field and store tracklets in Tracklets DC.

2005 May 9 MOPS Preliminary Design Review 171
Software Detailed Design: LODCTL
• Retrieve all unlinked tracklets for fields to be processed

2005 May 9 MOPS Preliminary Design Review 172
Software Detailed Design: LODCTL
• Execute LinkTracklets to create proposed tracklet linkages (tracks)
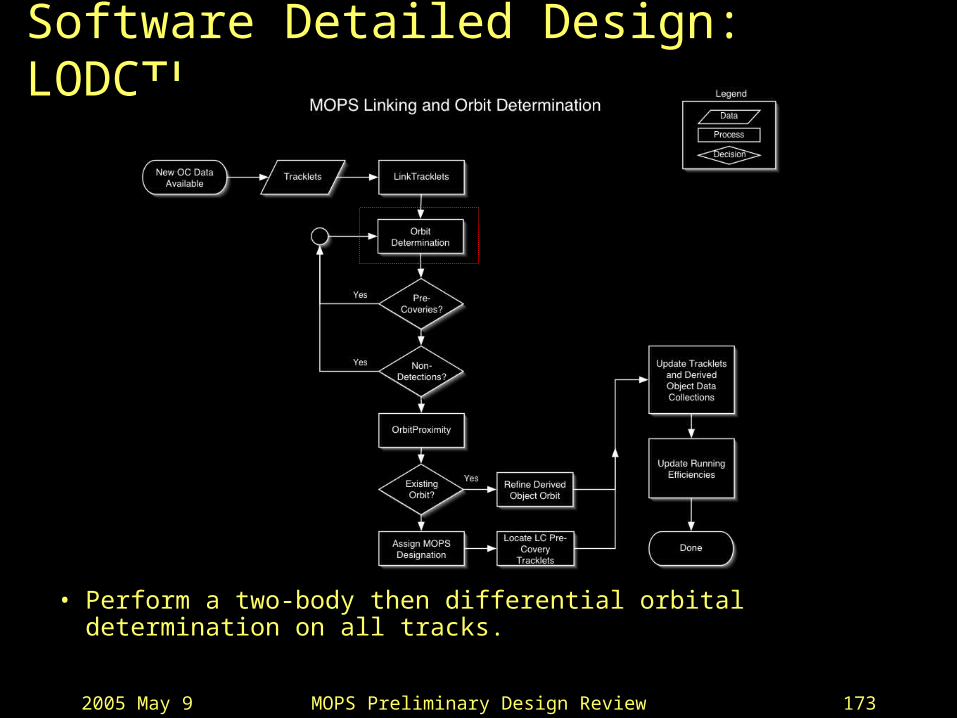
2005 May 9 MOPS Preliminary Design Review 173
Software Detailed Design: LODCTL
• Perform a two-body then differential orbital determination on all tracks.

2005 May 9 MOPS Preliminary Design Review 174
Software Detailed Design: LODCTL
• Look for precoveries and non-detections in the previous OC and refine the orbital parameters using new detections

2005 May 9 MOPS Preliminary Design Review 175
Software Detailed Design: LODCTL
• Execute OrbitProximity to find matches to derived objects.
2005 May 9 MOPS Preliminary Design Review 176
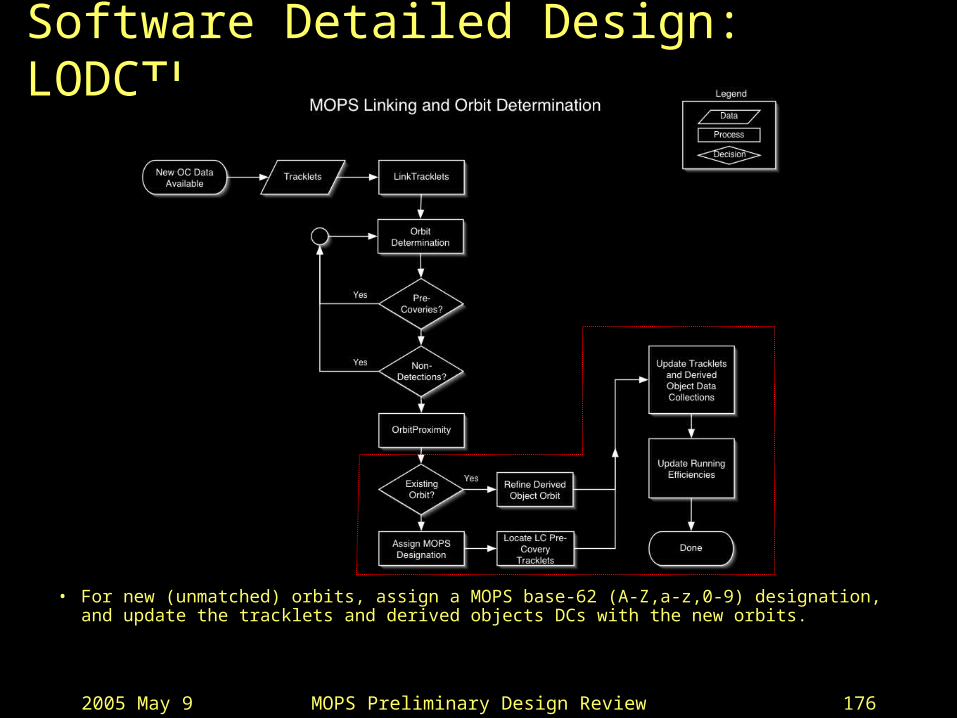
Software Detailed Design: LODCTL
• For new (unmatched) orbits, assign a MOPS base-62 (A-Z,a-z,0-9) designation, and update the tracklets and derived objects DCs with the new orbits.

2005 May 9 MOPS Preliminary Design Review 177
Software Design: MOPSOD

2005 May 9 MOPS Preliminary Design Review 178
Software Design: FieldProximity
• two critical MOPS tasks: – nightly ephemeris generation of
synthetic objects– searching for derived objects in
new input and previously acquired fields.
• uses KD-trees to associate positions of moving objects with fields
• ‘field’ is generalized to any circular region with an arbitrary radius on the celestial sphere.

2005 May 9 MOPS Preliminary Design Review 179
Software Design: LinkTracklets
• uses KD-trees to locate candidate linkages of tracklets acquired over many nights.
• LinkTracklets links tracklets to form tracks
• Tracks then pruned by linear or quadratic model
2005 May 9 MOPS Preliminary Design Review 180
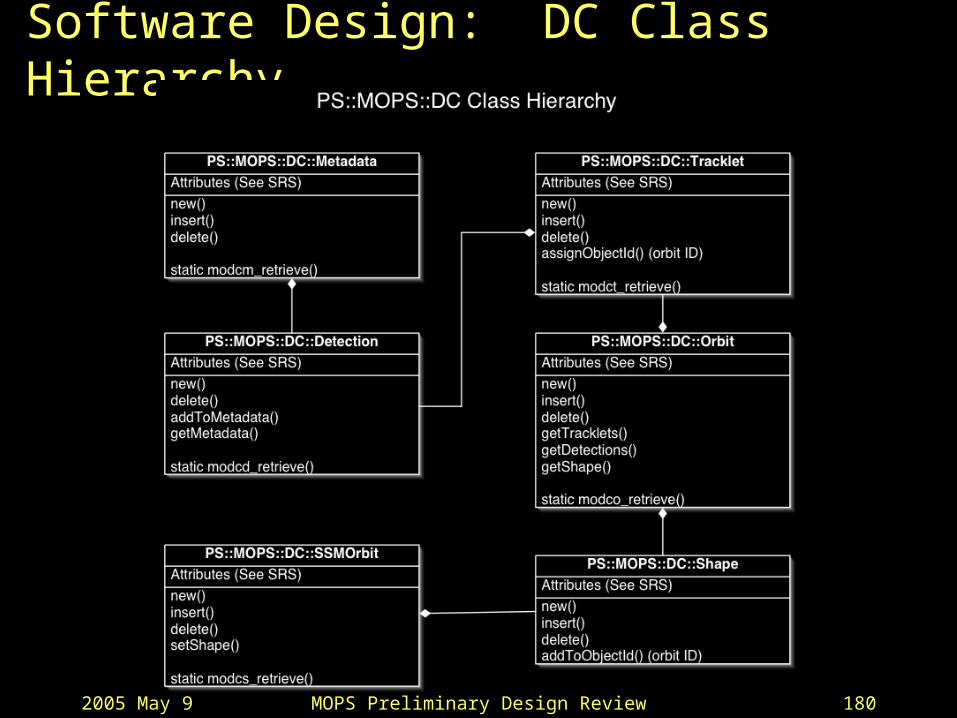
Software Design: DC Class Hierarchy

2005 May 9 MOPS Preliminary Design Review 181
Software Design: Hardware
• Hardware configuration must be designed to allow MOPS to meet its primary requirements
• Must be designed within existing framework and budget

2005 May 9 MOPS Preliminary Design Review 182
Software Design: Hardware
• networked industry-standard GNU/Linux 2.4 single-CPU or multiple-CPU systems capable of TBD MIPS/node.
• Nodes will be networked using TCP/IP over 1000BaseT Ethernet.

2005 May 9 MOPS Preliminary Design Review 183
Software Design: Hardware

2005 May 9 MOPS Preliminary Design Review 184
Software Design: Hardware
• Data Collections
– will reside in an Oracle 10g database instance named PSMOPS.
– Storage for the LCSOTDC, which constitutes 99.9\% of the storage requirement for the MOPS DCs, will reside in a federation of ``fat'' nodes running Pan-STARRS IPP Image Server/Idata software.

2005 May 9 MOPS Preliminary Design Review 185
Software Design: Hardware
• The MOPS Detection and Tracklets Controller (DTCTL), Linking and Orbit Determination Controller (LODCTL), and operator console will reside on three redundant identically-configured Standard class PCs.
hwutilization.eps

2005 May 9 MOPS Preliminary Design Review 186
Software Design: Hardware
• redundant design allows the MOPS to easily dispatch 1000 IPP metadata fields per night, respond to operator input within one second, and achieve 97% uptime
hwutilization.eps

2005 May 9 MOPS Preliminary Design Review 187
Software Design: Hardware
• Database Host will be a Server-class PC running Oracle 10g database software. Attached to this host will be networked storage containing 5TB storage for all MOPS data collections.
hwutilization.eps

2005 May 9 MOPS Preliminary Design Review 188
Software Design: Hardware
• System-wide general storage and database files for all data collections other than the LC SOT DC will reside on a network storage device with 5TB of storage. I/O to and from the storage device will be 1000-BaseT or FibreChannel
hwutilization.eps

2005 May 9 MOPS Preliminary Design Review 189
Software Design: Hardware
• General-purpose MOPS processing (FieldProximity, FindTracklets, LinkTracklets, OrbitProximity) will be performed on an 8-node cluster of Computation-class PCs.
hwutilization.eps

2005 May 9 MOPS Preliminary Design Review 190
Software Design: Hardware
• Ephemerides and Orbit calculation will be performed on 6- and 8-node clusters of Computation-class PCs.
hwutilization.eps

2005 May 9 MOPS Preliminary Design Review 191
Software Design: Hardware
• The LC SOT DC will exist as a federated cluster of ‘fat’ nodes running IPP IData Image Server code which provides a mechanism for redundant copies of LC SOT data to co-exist on multiple nodes.
hwutilization.eps

2005 May 9 MOPS Preliminary Design Review 192
Software Design: Hardware• Summary
Node Type Required
Standard 3
Computation 22
Server 2
Fat TBD

2005 May 9 MOPS Preliminary Design Review 193
MOPS Development Plan
• MOPS for PS-1development plan is designed to allow MOPS to meet its primary requirements by late 2006

2005 May 9 MOPS Preliminary Design Review 194
MOPS Development Plan
• Timeline
• Documentation
• Current Component Status
• Development & Testing plan

2005 May 9 MOPS Preliminary Design Review 195
MOPS Timeline: Project
TODAY

2005 May 9 MOPS Preliminary Design Review 196
MOPS Timeline: Simulations
TODAY

2005 May 9 MOPS Preliminary Design Review 197
MOPS Timeline: PS1• This is not in current project timeline
PS1 First Light

2005 May 9 MOPS Preliminary Design Review 198
MOPS Status: Documentation• Critical Documentation
Complete & Evolving
PSDC-530-001: Software Requirement Specification PSDC-530-002: Algorithm Design Description PSDC-530-003: Software Design Description
Not started
o Software Version Descriptiono Sub-system Test Plano Sub-system Maintenance Plano Software User Manual

2005 May 9 MOPS Preliminary Design Review 199
MOPS Status: Documentation• Supplementary Documentation
PSDC-500-001Orbit Determination Ephemeris Software
PSDC-500-003Solar System Survey Simulation
PSDC-500-004Solar System Model
2005 May 9 MOPS Preliminary Design Review 200
MOPS Status: Publications• None to date
• Planning a series of papers:
MOPS-1: The Pan-STARRS Solar System Model MOPS-2: The Pan-STARRS Solar System Survey Simulation MOPS-3: Linking Pan-STARRS Solar System Detections MOPS-4: Pan-STARRS Detection and Orbit Determination Efficiency
• Then, as Pan-STARRS begins operations, a summary and update of all the above:
MOPS-5: Pan-STARRS Moving Object Processing System Operations
2005 May 9 MOPS Preliminary Design Review 201
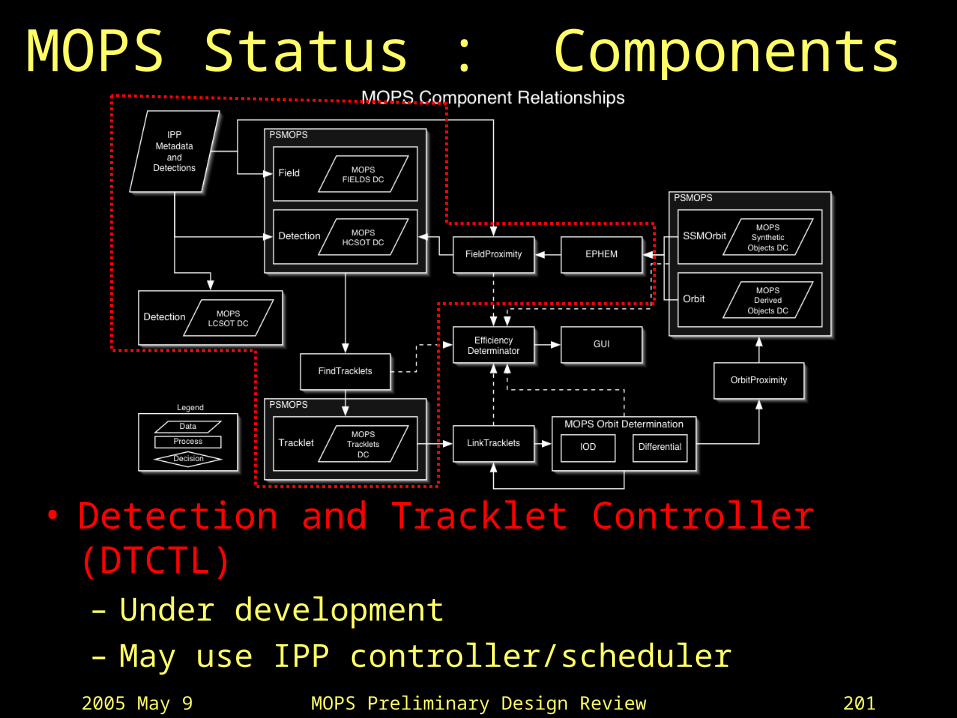
MOPS Status : Components
• Detection and Tracklet Controller (DTCTL)– Under development– May use IPP controller/scheduler
2005 May 9 MOPS Preliminary Design Review 202
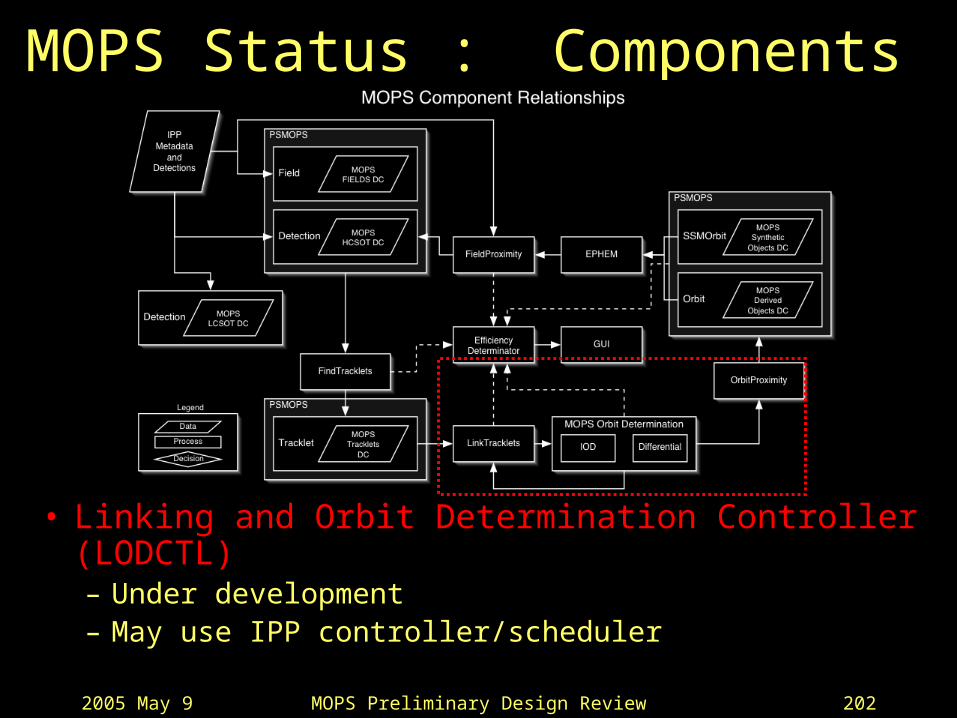
MOPS Status : Components
• Linking and Orbit Determination Controller(LODCTL)– Under development– May use IPP controller/scheduler

2005 May 9 MOPS Preliminary Design Review 203
MOPS Status : Components
• MOPS Internal Databases (PSMOPS)– Delivered by SAIC– Operational– Continuing improvements

2005 May 9 MOPS Preliminary Design Review 204
MOPS Status : Components
• Low Confidence SOT DC (LCSOTDC)– Not developed– Unimplemented and developing code– No hardware

2005 May 9 MOPS Preliminary Design Review 205
MOPS Status : Components
• Shape Model (SHAPE)– Not Delivered by SAIC– Developing code

2005 May 9 MOPS Preliminary Design Review 206
MOPS Status : Components
• FieldProximity / FindTracklets / LinkTracklets / OrbitProximity– Delivered by CMU (Kubica)– Operational and undergoing continuing tests– Kubica visiting May 23 – June 3 to improve interface and
operations

2005 May 9 MOPS Preliminary Design Review 207
MOPS Status : Components
• Orbit Determination (MOPSOD)– Under development– Preliminary version is operational
2005 May 9 MOPS Preliminary Design Review 208
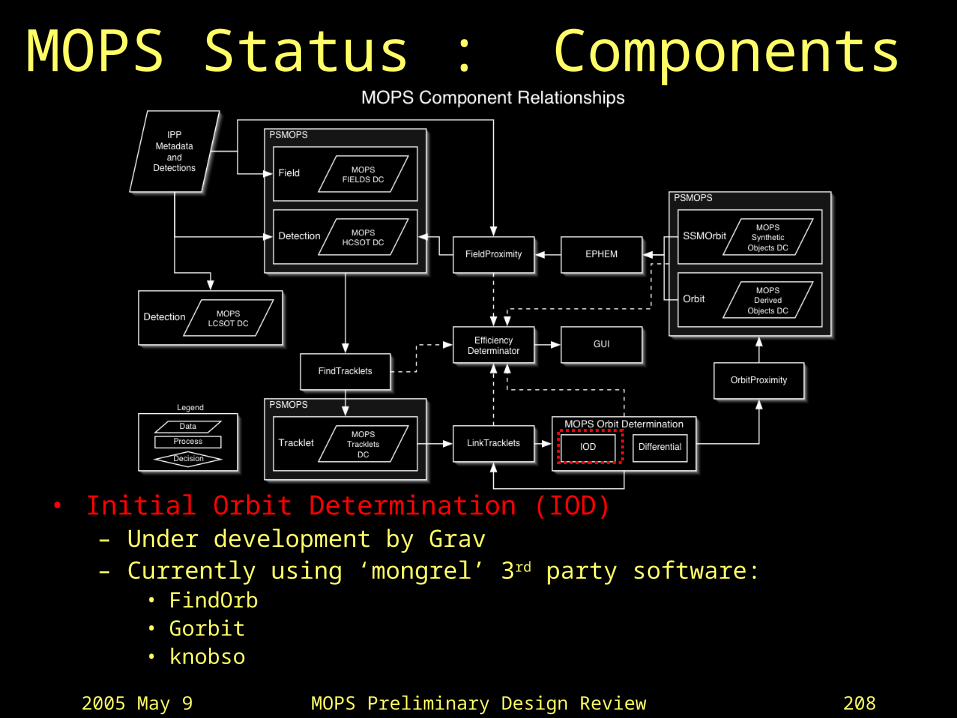
MOPS Status : Components
• Initial Orbit Determination (IOD)– Under development by Grav– Currently using ‘mongrel’ 3rd party software:
• FindOrb• Gorbit• knobso

2005 May 9 MOPS Preliminary Design Review 209
MOPS Status : Components
• Differential Corrector (DIFFCOR)– Delivered by JPL– Operational– Currently in initial testing phase

2005 May 9 MOPS Preliminary Design Review 210
MOPS Status : Components
• Ephemeris Generator (EPHEM)– Delivered by JPL– Operational– Currently in initial testing phase

2005 May 9 MOPS Preliminary Design Review 211
MOPS Status : Components
• Efficiency Determinator– Almost non-existent– Need full design, algorithms and operations
specification

2005 May 9 MOPS Preliminary Design Review 212
MOPS Status : Components
• Graphical User Interface (GUI)– Non-existent– Need full design & operations specification

2005 May 9 MOPS Preliminary Design Review 213
MOPS Status : Component Summary
Component Status
Detection and Tracklet Controller Under development
Linking & Orbit Determination Controller
Under development
Initial Orbit Determination Under developmentCurrently using SW with strange pedigree
Differential Corrector Delivered & Operational
Orbit Determination Under development
Ephemeris Generator Delivered & Operational
FieldProximity Delivered, Operational, Revising
FindTracklets Delivered, Operational, Revising
LinkTracklets Delivered, Operational, Revising
OrbitProximity Delivered & Un-tested

2005 May 9 MOPS Preliminary Design Review 214
MOPS Status : Components
Component Status
MOPS Internal Database Under development
Fields DC Delivered, Operational, Revising
Low Confidence SOT DC Under development
High Confidence SOT DC Delivered, Operational, Revising
Tracklets DC Delivered, Operational, Revising
Derived Objects DC Delivered, Operational, Revising
Synthetic Objects DC Delivered, Operational, Revising
Shape Model Not available
Efficiency Determinator Not developed
Graphical User Interface Not developed

2005 May 9 MOPS Preliminary Design Review 215
MOPS Test Plan
• MOPS testing is integral to its development through the continuous use of synthetic data
• We will constantly compare MOPS performance to the primary requirements

2005 May 9 MOPS Preliminary Design Review 216
MOPS Test Plan• We have already tested our preliminary
pipeline through the following steps:
solar system model solar system survey simulation intra-night linking (FindTracklets) inter-night linking (LinkTracklets) Orbit Determination (OD)
• Initial Orbit Determination (IOD)• Differential Correction (DIFFCOR)

2005 May 9 MOPS Preliminary Design Review 217
MOPS Test Plan• not yet tested:
inter-lunation linking orbit identification
• However
– Preliminary indications of orbit determination accuracy (with 3 nights of pairs of detections) are excellent
– Preliminary indications of inter-lunation ephemeris prediction are excellent

2005 May 9 MOPS Preliminary Design Review 218
MOPS Test Plan: SimulationsEvening Sweet Spot Morning Sweet Spot
Low Opposition High Opposition
2005 May 9 MOPS Preliminary Design Review 219
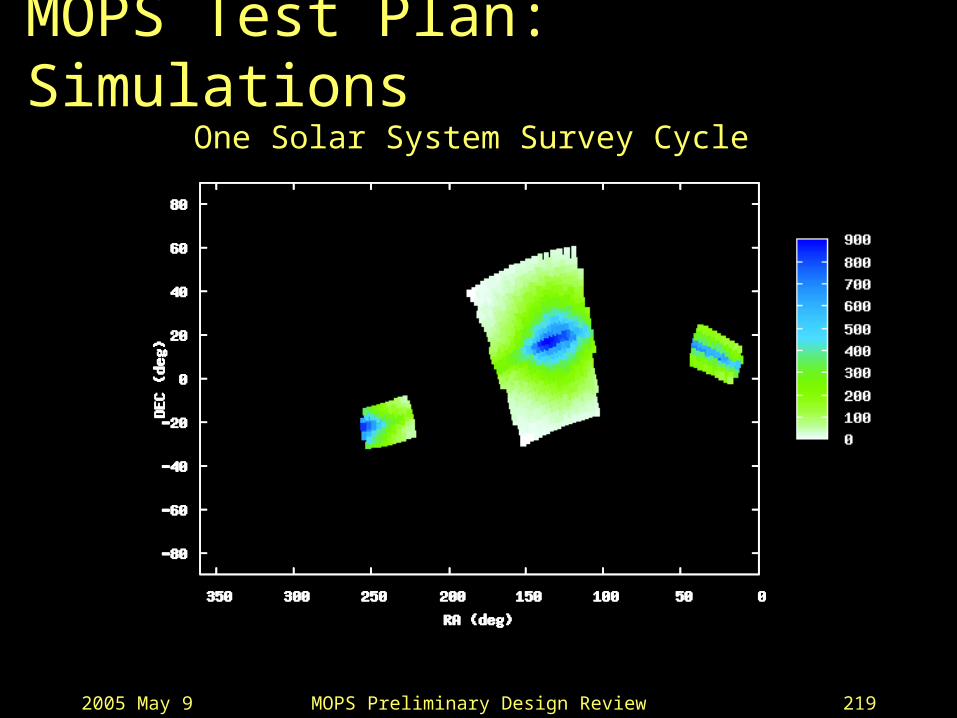
MOPS Test Plan: SimulationsOne Solar System Survey Cycle

2005 May 9 MOPS Preliminary Design Review 220
MOPS Test Plan: Simulations
Opposition motion

2005 May 9 MOPS Preliminary Design Review 221
MOPS Test Plan: Simulations
Sweet spot motion

2005 May 9 MOPS Preliminary Design Review 222
MOPS Test Plan: SimulationsRecovery Estimation Error
(Opposition)
2005 May 9 MOPS Preliminary Design Review 223
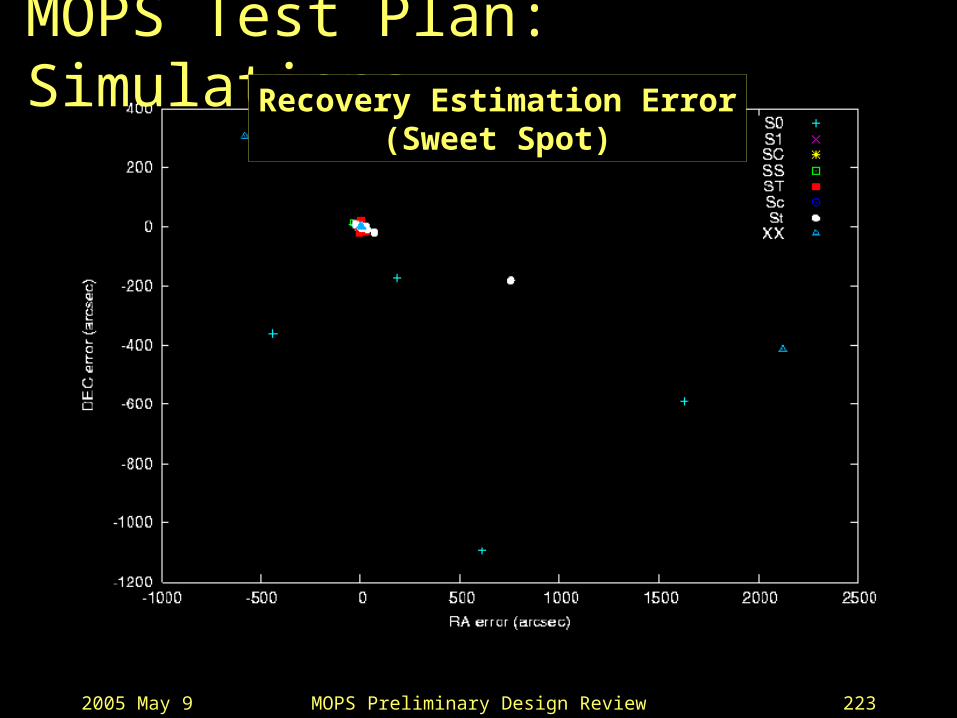
MOPS Test Plan: SimulationsRecovery Estimation Error
(Sweet Spot)

2005 May 9 MOPS Preliminary Design Review 224
MOPS Test Plan: Simulations
1/3 arcmin2
Recovery Estimation Error(Sweet Spot)

2005 May 9 MOPS Preliminary Design Review 225
MOPS Test Plan: Simulations
TypePresent
Findable Clean OD Overall30 day AREE
NEO 283 37%100.0%
72.4% 72.4% 70"
MB 1684 55% 99.7% 99.9% 99.6% 2.43"
Trojans 1256 42% 99.8% 97.1% 97.0% 4.03"
Centaurs 92 63%100.0%
100.0%
100.0% 1.08"
TNOs 2494 60%100.0%
54.0% 54.0% 0.81"
SDOs 485 54%100.0%
76.8% 76.8% 0.48"
Comets 35 49%100.0%
100.0%
100.0% 3.79"
NEO (real) 81 58%100.0%
89.4% 89.4% 68.97"
Total 6410 54% 99.9% 76.7% 76.7% 4.5"
Linking and Orbit Determination EfficiencySSM = MB/100 + Everything else
Evening Sweet Spot (OC=61)Multi-Pass, lin_thresh=0.1 quad_thresh=0.1
2005 May 9 MOPS Preliminary Design Review 226
MOPS Test Plan: Simulations
TypePresent
Findable Clean OD Overall30 day AREE
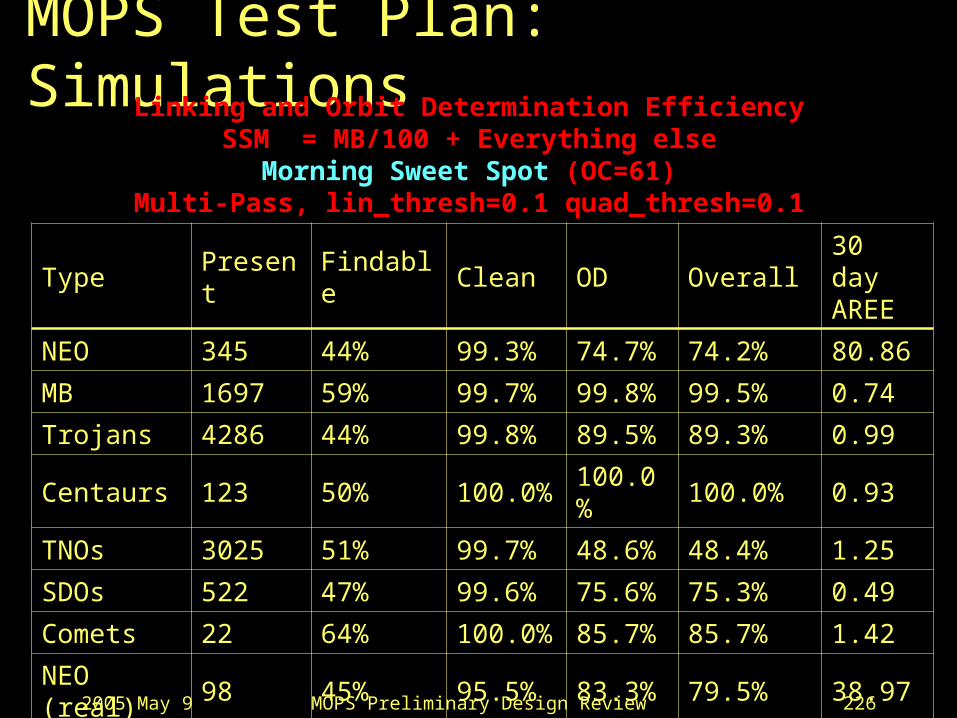
NEO 345 44% 99.3% 74.7% 74.2% 80.86
MB 1697 59% 99.7% 99.8% 99.5% 0.74
Trojans 4286 44% 99.8% 89.5% 89.3% 0.99
Centaurs 123 50%100.0%
100.0%
100.0% 0.93
TNOs 3025 51% 99.7% 48.6% 48.4% 1.25
SDOs 522 47% 99.6% 75.6% 75.3% 0.49
Comets 22 64%100.0%
85.7% 85.7% 1.42
NEO (real) 98 45% 95.5% 83.3% 79.5% 38.97
Total 10118 49% 99.7% 77.9% 77.6% 3.53
Linking and Orbit Determination EfficiencySSM = MB/100 + Everything else
Morning Sweet Spot (OC=61)Multi-Pass, lin_thresh=0.1 quad_thresh=0.1

2005 May 9 MOPS Preliminary Design Review 227
MOPS Test Plan: Simulations
TypePresent
Findable Clean OD Overall30 day AREE
NEO 95 33% 87.1%100.0%
87.1% 0.39
MB 182 65% 97.5%100.0%
97.5% 0.25
Trojans 3866 79% 99.9%100.0%
99.9% 0.30
Centaurs 26 81%100.0%
100.0%
100.0% 0.23
TNOs 3 100%100.0%
100.0%
100.0% 0.15
SDOs 155 92%100.0%
100.0%
100.0% 0.12
Comets 11 64% 85.7%100.0%
85.7% 0.25
NEO (real) 8 50% 75.0%100.0%
75.0% 0.38
Total 4346 78% 99.6%100.0%
99.6% 0.29
Linking and Orbit Determination EfficiencySSM = MB/100 + Everything else400 deg2 near opposition (OC=61)
Multi-Pass, lin_thresh=0.1 quad_thresh=0.1

2005 May 9 MOPS Preliminary Design Review 228
MOPS Test Plan
• Near term improvements
Introduce astrometric noise 1/10th MB model full density MB model other solar system survey modes
30min TTI 4 nights/lunation opposition & sweet-spot only
inter-lunation and inter-opposition linking

2005 May 9 MOPS Preliminary Design Review 229
MOPS Test Plan
• Final goal:
MEET REQUIREMENTS

2005 May 9 MOPS Preliminary Design Review 230
Risk Assessment:
WILL MOPS MEET ITS REQUIREMENTS?
WHAT ARE THE RISKS?
WHAT ARE THEIR IMPACTS?
WHAT IS OUR RISK REDUCTION PLAN?

2005 May 9 MOPS Preliminary Design Review 231
Risk Assessment: Telescope
• Telescope design, location, dome must allow surveying to small solar elongation
Provide telescope engineers solar system survey requirements on altitude-azimuth for simulated surveying at small solar elongation
Risk
Impact
Risk reduction plan
• reduced PHO detection efficiency• increased time to meet PHO requirements

2005 May 9 MOPS Preliminary Design Review 232
Risk Assessment: Telescope
• Telescope optical system may not allow surveying at low altitudes (mechanically and optically)
Encourage development of Atmospheric Dispersion Compensator (ADC)
Ensure that telescope/optical designers are aware of low altitude surveying requirements
Risk
Impact• reduced PHO detection efficiency in sweet-spots• increased time to meet PHO requirements
Risk reduction plan

2005 May 9 MOPS Preliminary Design Review 233
Risk Assessment: Camera
• Nothing MOPS-specific
None
Risk
Impact
Risk reduction plan
None

2005 May 9 MOPS Preliminary Design Review 234
Risk Assessment: OTIS
• All fields in all survey modes must be acquired at least twice per night
• The maximum time separation between two of the images must be less than TTImax
Ensure that these specifications are in the OTIS requirements
Confirm that OTIS simulator surveys in this mode
Risk
Impact
Risk reduction plan
Unable to function

2005 May 9 MOPS Preliminary Design Review 235
Risk Assessment: OTIS
• Solar system surveying mode must provide at least 3 (perhaps 4) nights of detections separated by a total of no less than 6 and no more than 12 nights (TBR)
• at least one pair of nights must have a separation of between 3 and 5 nights (TBR)
Ensure that these specifications are in the OTIS requirements
Confirm that OTIS simulator surveys in this mode
Risk
Impact
Risk reduction plan
Unable to function

2005 May 9 MOPS Preliminary Design Review 236
Risk Assessment: IPP
• Must efficiently detect ASTEROIDS• Must determine efficiency w.r.t. flux, motion, etc.• How do we determine if there is a problem?• Is it IPP or MOPS causing reduction in efficiency?
Verify that minimum ASTEROID detection efficiency is an IPP requirement
Ensure that IPP is tested on ASTEROID detections
Ongoing discussion with IPP members
Risk
Impact
Risk reduction plan
Major
Improper determination of MOPS efficiency
Unable to bias-correct data

2005 May 9 MOPS Preliminary Design Review 237
Risk Assessment: IPP
• Must efficiently detect COMETS• Must determine efficiency w.r.t. flux, motion, etc.• How do we determine if there is a problem?• Is it IPP or MOPS causing reduction in efficiency?
Verify that minimum COMET detection efficiency is an IPP requirement
Ensure that IPP is tested on COMET detections
Ongoing discussion with IPP members
Risk
Impact
Risk reduction plan
Major
Improper determination of MOPS efficiency
Unable to bias-correct data

2005 May 9 MOPS Preliminary Design Review 238
Risk Assessment: SAIC
• Slow turnaround time on DC development cycle
Working with SAIC to reduce development cycle
Risk
Impact
Risk reduction plan
• Schedule delays• Wasted time waiting for implementation

2005 May 9 MOPS Preliminary Design Review 239
Risk Assessment: PSPS
• Nothing MOPS-specific
None
Risk
Impact
Risk reduction plan
None

2005 May 9 MOPS Preliminary Design Review 240
Risk Assessment: MOPS Design
• All MOPS components have prototypes that are being tested on synthetic data BUT– NOT tested at full sky-plane density– NOT tested with astrometric & photometric errors– NOT tested with false detections (noise)
Once pipeline is fully operational we will scale up the synthetic data to incorporate these effects and monitor MOPS efficiency as they are added
Continuing improvement of solar system model, survey simulator and inclusion of ever-more realistic detector performance
Collaboration with Milani developing parallel and very different linking algorithms
Risk
Impact
Risk reduction plan
Increased computing time
Increased computing power
Reduced detection efficiency

2005 May 9 MOPS Preliminary Design Review 241
Risk Assessment: MOPS Design
• Reliance on 3rd party software(IOD, OD, FindTracklets, LinkTracklets, FieldProximity, OrbitProximity)
Use 3rd party SW with good pedigree (JPL)
Develop test suites for 3rd party SW under realistic but synthetic conditions
Reduce reliance on 3rd party SW (e.g. IOD)
Sign no-revoke contract with consultants
Risk
Impact
Risk reduction plan
• If consultants stop working with us we have no backup, no opportunity for algorithm improvement, no depth

2005 May 9 MOPS Preliminary Design Review 242
Risk Assessment: MOPS Schedule
• PS-1 should deliver detections suitable for linking by late 2006
• Current schedule has MOPS for PS-1 operational in July 2006• MOPS schedule may be too agressive
If we believe project schedule none necessary
Continuous monitoring of MOPS progress by MOPS manager and PMO
Risk
Impact
Risk reduction plan
Schedule delays

2005 May 9 MOPS Preliminary Design Review 243
Risk Assessment: MOPS Resources
• Reduced budget for collaboration with consultants
Working with PMO to address the problem
Risk
Impact
Risk reduction plan
Schedule delays
Inefficient algorithms
Reduced detection efficiency

2005 May 9 MOPS Preliminary Design Review 244
Risk Assessment: MOPS Resources
• Too few FTE assigned to MOPS• Too much dependence on single SW engineer• Too much reliance on consultants
Working with PMO to address the problem
Attempt to co-hire SW engineer with LSST
Risk
Impact
Risk reduction plan
• Schedule delays• Unable to ensure that requirements are being met (e.g.
software coding standards, attending other group’s meeting)

2005 May 9 MOPS Preliminary Design Review 245
Risk Assessment: MOPS Resources
• Mini-MOPS hardware system purchase delayed 6 months already
• $50K in current MOPS budget BUT no facility to store the system when purchased
Working with PMO to address the problem
Risk
Impact
Risk reduction plan
Schedule delays
Inefficient use of time

2005 May 9 MOPS Preliminary Design Review 246
NO Impact!
NOT ENDTHE
MOPS
















