
INTERFACES DE DATOS AUTOMOTRICES MANUAL DE ...
10
INTERFACES DE DATOS AUTOMOTRICES MasterCAN CC MasterCAN V-GATE MasterCAN C 232/485 SK MasterCAN MANUAL DE INSTRUCCIONES (incluye las instrucciones del usuario del software Service MasterCAN) Versión 4.0
Transcript of INTERFACES DE DATOS AUTOMOTRICES MANUAL DE ...
INTERFACES DE DATOS AUTOMOTRICES
MasterCAN CC MasterCAN V-GATE
MasterCAN C 232/485
SK MasterCAN
MANUAL DE INSTRUCCIONES
(incluye las instrucciones del usuario
del software Service MasterCAN)
Versión 4.0
Índice
Interfaces de datos automotrices MasterCAN. Manual de instrucciones. Versión 4.0 2
© Technoton, 2017
Índice
Historial de cambios ................................................................................................... 4
Términos y determinaciones ....................................................................................... 5
Introducción ............................................................................................................. 6
1 Conceptos fundamentales y características técnicas .................................................... 8
1.1 Designación y área de aplicación ......................................................................... 8
1.2 Kit de suminstro ............................................................................................. 10
1.3 Aspecto y estructura ....................................................................................... 11
1.3.1 Aspecto y estructura de MasterCAN CC ........................................................ 11
1.3.2 Aspecto y estructura de MasterCAN C 232/485 ............................................. 12
1.3.3 Aspecto y estructura de MasterCAN V-GATE ................................................. 13
1.4 Principio de funcionamiento .............................................................................. 14
1.5 Características técnicas .................................................................................... 15
1.5.1 Características principales de explotación ..................................................... 15
1.5.2 Interfaces de entrada y salida de MasterCAN CC ........................................... 16
1.5.3 Interfaces de entrada y salida de MasterCAN C 232/485 ................................ 18
1.5.4 Interfaces de entrada y salida de MasterCAN V-GATE .................................... 19
1.6 Dimensiones................................................................................................... 20
2 Conexión de MasterCAN ......................................................................................... 21
2.1 Inspeccion exterior antes de la conexion ............................................................ 21
2.2 Restricciones de explotación ............................................................................. 22
2.3 La conexión eléctrica ....................................................................................... 23
2.3.1 Utilización de los lectores sin contacto Crocodile para
la conexión del MasterCAN ......................................................................... 24
2.3.2 Conexión del MasterCAN CC ....................................................................... 25
2.3.3 Conexión del MasterCAN C 232/485 ............................................................ 27
2.3.4 Conexión del MasterCAN V-GATE ................................................................. 28
2.4 Prueba de funcionamiento ................................................................................ 30
2.5 Utilización del MasterCAN como el sumador de los sensores
de nivel de combustible DUT-E CAN .................................................................. 31
3 Configuración de MasterCAN con un kit de servicio .................................................... 32
3.1 Designación SK MasterCAN .............................................................................. 32
3.2 Requerimientos para el PC ............................................................................... 33
3.3 Contenido de SK MasterCAN ............................................................................. 34

Índice
Interfaces de datos automotrices MasterCAN. Manual de instrucciones. Versión 4.0 3
© Technoton, 2017
3.3.1 Aspecto y contenido .................................................................................. 34
3.3.2 El adaptador universal de servicio ............................................................... 35
3.3.3 Cable USB A-B .......................................................................................... 36
3.3.4 Cable de servicio MasterCAN CC, MasterCAN C 232/485, MasterCAN V-GATE .... 37
3.3.5 Cable de servicio MasterCAN Diagnostic ....................................................... 38
3.4 Conexión de SK MasterCAN .............................................................................. 39
3.4.1 Inspección exterior antes de la conexión ...................................................... 39
3.4.2 Restricciones de explotación ....................................................................... 40
3.4.3 Conexión de MasterCAN al PC ..................................................................... 41
3.5 Verificación de estado ...................................................................................... 43
3.6 Trabajo con software ....................................................................................... 44
3.6.1 Autorización del usuario ............................................................................. 44
3.6.2 Perfíl de MasterCAN ................................................................................... 45
3.6.3 Configuración de MasterCAN ....................................................................... 47
3.6.4 Actualizar el firmware de MasterCAN ........................................................... 49
4 El almacenaje ....................................................................................................... 51
5 La transportación .................................................................................................. 52
6 Reciclaje .............................................................................................................. 53
Información de contacto ........................................................................................... 54
Anexo A Carta de registros de los mensajes de salida del MasterCAN
por el protocolo Modbus .............................................................................. 55
Anexo B Protocolo de trasmisión de mensajes de texto MasterCAN C 232/485
y MasterCAN V-GATE .................................................................................. 59
Anexo C El esquema de la conexión del MasterCAN para la totalización
de las indicaciones de dos o más sensores DUT-E CAN .................................. 62

Historial de cambios
Interfaces de datos automotrices MasterCAN. Manual de instrucciones. Versión 4.0 4
© Technoton, 2017
Historial de cambios
Versión Fecha Editor Descripción de cambios
1.0 01.2013 OD Versión básica.
4.0 01.2017 OD Nueva construcción de cables de salida de toda la línea de
MasterCAN.
Ajustes en esquemas de conexión de MasterCAN al terminal.
Ajustes del paquete de suministro MasterCAN y
SK MasterCAN.
Utilización del SK S6 para configurar MasterCAN.
Cambios y ajustes de esquemas de conexión de MasterCAN al PC.
Comentarios de parámetros de configuración
MasterCAN V-GATE.
Adiciones al protocolo de trasmisión de datos MasterCAN.
Actualización de terminología.
Términos y determinaciones
Interfaces de datos automotrices MasterCAN. Manual de instrucciones. Versión 4.0 5
© Technoton, 2017
Términos y determinaciones
S6 - interfaz telemática para vehículos elaborada por Technoton para
asegurar la integración de los sistemas GPS/GLONASS del monitoreo de
transporte y los elementos del equipamiento electrónico del vehículo.
Representa un sistema de cables y protocolos. Fisicamente está realizado a
base de las interfaces CAN 2.0B (ISO 11898-1:2003) y K-Line (ISO 9141).
El protocolo del intercambio de información a través de bus S6 fue construido a base del
estandar SAE J1939 y corresponde a sus requerimientos.
La descripción detallada del protocolo de la transmisión de datos del bus telematico S6 está
expuesto en el sitio web http://s6.jv-technoton.com/en/.
PGN (Parameter Group Number) es el número de grupo de parametros que determina el
contenido del mensaje correspondiente de bus CAN de acuerdo con SAE J1939. El término
PGN se usa para la descripcion de los mensajes del bus CAN.
SPN (Suspect Parameter Number) es el número de parámetro determinado en el mensaje
de bus CAN de acuerdo con SAE J1939. Cada SPN tiene su nombre correspondiente, tamaño
de datos en bites, tipo de datos, valor numérico. El SPN podría tener un especificador, es
decir un campo adicional que permite concretar el valor de parámetro (por ejemplo – límite
de tensión a bordo-mínima).
J1708 — interfaz digital consecutiva de comunicación con formato de bus. Bus J1708 se usa
para transmitir los datos y intercambiar information entre el controlador de motor y otros
bloques electrónicos del vehículo. Los datos son representados según el estándar
SAE J1587.
FMS — paquetes de datos de bus de a bordo conformen con la describción de
estándar FMS Interfaz description (en adelante — FMS-estándar).
FMS-estándar es un estándar abierto de interfaz FMS, desarrollado por
fabricantes líderes de vehículos pesados.
Se puede descargar la versión actual de la página web http://www.fms-standard.com
Telematics — un conjunto de mensajes específicas, elaborado por Technoton según el
estándar SAE J1939. Mensajes telemáticos incluyen información básica de los parámetros
de funcionamiento del vehículo.
Equipos de a bordo son aparatos electrónicos a bordo, elementos del sistema telematica.
Sistema telematica es una solución completa para monitorear el vehículo en tiempo real.
Las características principales de control son ruta, consumo de combustible, tiempo en
marcha, seguridad. El sistema contiene equipo a bordo, conexiones, plataforma telematica
ORF 4.
Terminal es un elemento del sistema de monitoreo, que realiza la lectura de señales de los
sensores reglamentarios y complementarios, instalados en el vehículo, la recepción de
señales sobre las coordenadas de los satélites de navegación y la transmisión de los datos al
Servidor de servicios.
Vehículo es un objeto de control dentro del sistema de monitoreo de transporte. Suele ser un
camion, autobus o tractor, locomotora, barco o transporte tecnológico. Desde el punto de
vista del sistema de monitoreo a la lista de vehiculos tambien corresponden generadores
diesel, calderas de calefaccion, hornillas, etc.
Unidad es un elemento del equipo de a bordo del vehículo que se conecta al bus S6.

Introducción
Interfaces de datos automotrices MasterCAN. Manual de instrucciones. Versión 4.0 6
© Technoton, 2017
Introducción
Las recomendaciones y las reglas, expuestas en el Manual de instrucciones se refieren a las
interfaces de datos del automóvil MasterCAN (en adelante — MasterCAN) y el kit de servicio
SK MasterCAN (en adelante — SK MasterCAN), elaborados por JV Technoton, la ciudad
de Minsk, la República de Bélarus.
Este documento contiene información general sobre estructura, princípios de
funcionamiento, características, además contiene recomendaciones de explotación de
MasterCAN. Este documento determina el orden de instalación y como utilizar el software
Service de Mastercan (versiones de 3.2 y más).
— instrumento de Sistemas telemáticos, destinado a recibir
de forma segura y constante los datos de los buses informáticos de a bordo de Vehículos.
SK MasterCAN garantiza el intercambio de datos del PC y MasterCAN después de
configurarlo.
Peculiaridades:
conforme con estándar automotriz europeo y doméstico;
integración fácil con los sistemas de la telemática;
unión segura de datos de una o varios buses informáticos en Interfaz telemática *;
simplifica la configuración del terminal al excluir datos irrelevantes;
es fácil de instalar con la ayuda de lectores sin contacto y
;
contador automático de consumo de combustible durante la ruta, acumula los datos
de consumo de combustible por hora del bus CAN **;
se alimenta de la red de a bordo del automóvil y no requiere la utilización de los
bloques de alimentación complementarios.
* MasterCAN CC y MasterCAN V-GATE.
** MasterCAN CC con firmware versión por lo menos v.8, MasterCAN C 232/485 y
MasterCAN V-GATE con firmware versión por lo menos v.7
Introducción
Interfaces de datos automotrices MasterCAN. Manual de instrucciones. Versión 4.0 7
© Technoton, 2017
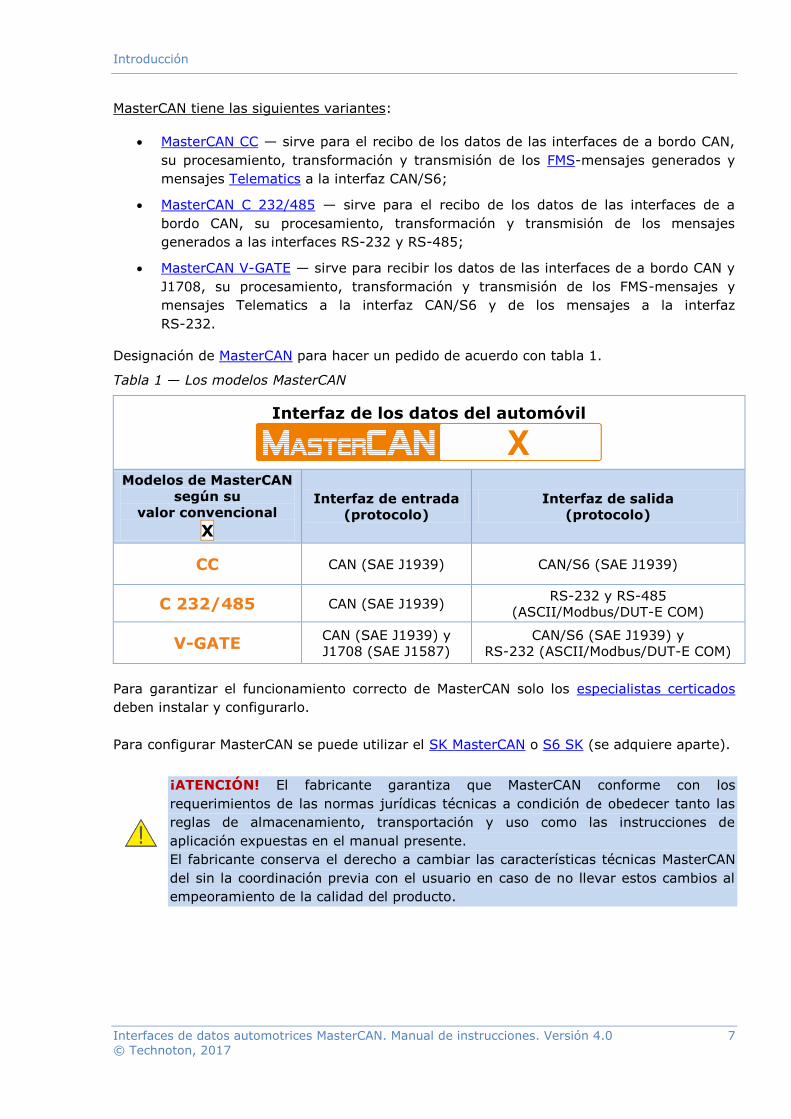
MasterCAN tiene las siguientes variantes:
MasterCAN CC — sirve para el recibo de los datos de las interfaces de a bordo CAN,
su procesamiento, transformación y transmisión de los FMS-mensajes generados y
mensajes Telematics a la interfaz CAN/S6;
MasterCAN C 232/485 — sirve para el recibo de los datos de las interfaces de a
bordo CAN, su procesamiento, transformación y transmisión de los mensajes
generados a las interfaces RS-232 y RS-485;
MasterCAN V-GATE — sirve para recibir los datos de las interfaces de a bordo CAN y
J1708, su procesamiento, transformación y transmisión de los FMS-mensajes y
mensajes Telematics a la interfaz CAN/S6 y de los mensajes a la interfaz
RS-232.
Designación de MasterCAN para hacer un pedido de acuerdo con tabla 1.
Tabla 1 — Los modelos MasterCAN
Interfaz de los datos del automóvil
Modelos de MasterCAN
según su
valor convencional
X
Interfaz de entrada
(protocolo)
Interfaz de salida
(protocolo)
CC CAN (SAE J1939) CAN/S6 (SAE J1939)
C 232/485 CAN (SAE J1939) RS-232 y RS-485
(ASCII/Modbus/DUT-E COM)
V-GATE CAN (SAE J1939) y
J1708 (SAE J1587)
CAN/S6 (SAE J1939) y
RS-232 (ASCII/Modbus/DUT-E COM)
Para garantizar el funcionamiento correcto de MasterCAN solo los especialistas certicados
deben instalar y configurarlo.
Para configurar MasterCAN se puede utilizar el SK MasterCAN o S6 SK (se adquiere aparte).
¡ATENCIÓN! El fabricante garantiza que MasterCAN conforme con los
requerimientos de las normas jurídicas técnicas a condición de obedecer tanto las
reglas de almacenamiento, transportación y uso como las instrucciones de
aplicación expuestas en el manual presente.
El fabricante conserva el derecho a cambiar las características técnicas MasterCAN
del sin la coordinación previa con el usuario en caso de no llevar estos cambios al
empeoramiento de la calidad del producto.
Conceptos fundamentales y características técnicas / Designación y área de aplicación
Interfaces de datos automotrices MasterCAN. Manual de instrucciones. Versión 4.0 8
© Technoton, 2017
1 Conceptos fundamentales y características
técnicas
1.1 Designación y área de aplicación
sirve para transformar los datos de buses informáticos
y formar información final para sistemas telemáticos.
Área de aplicación — Sistema telemático.
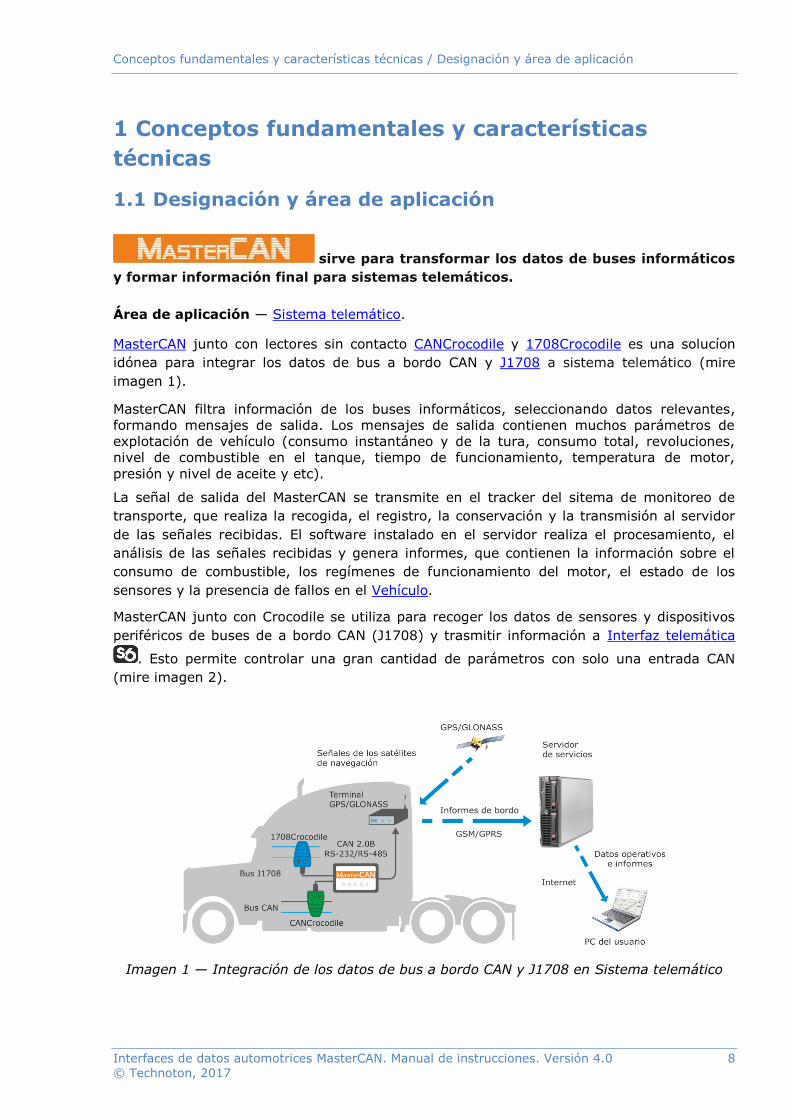
MasterCAN junto con lectores sin contacto CANCrocodile y 1708Crocodile es una solucíon
idónea para integrar los datos de bus a bordo CAN y J1708 a sistema telemático (mire
imagen 1).
MasterCAN filtra información de los buses informáticos, seleccionando datos relevantes,
formando mensajes de salida. Los mensajes de salida contienen muchos parámetros de
explotación de vehículo (consumo instantáneo y de la tura, consumo total, revoluciones,
nivel de combustible en el tanque, tiempo de funcionamiento, temperatura de motor,
presión y nivel de aceite y etc).
La señal de salida del MasterCAN se transmite en el tracker del sitema de monitoreo de
transporte, que realiza la recogida, el registro, la conservación y la transmisión al servidor
de las señales recibidas. El software instalado en el servidor realiza el procesamiento, el
análisis de las señales recibidas y genera informes, que contienen la información sobre el
consumo de combustible, los regímenes de funcionamiento del motor, el estado de los
sensores y la presencia de fallos en el Vehículo.
MasterCAN junto con Crocodile se utiliza para recoger los datos de sensores y dispositivos
periféricos de buses de a bordo CAN (J1708) y trasmitir información a Interfaz telemática
. Esto permite controlar una gran cantidad de parámetros con solo una entrada CAN
(mire imagen 2).
Imagen 1 — Integración de los datos de bus a bordo CAN y J1708 en Sistema telemático

Conceptos fundamentales y características técnicas / Características técnicas / Interfaces de entrada y salida de MasterCAN CC
Interfaces de datos automotrices MasterCAN. Manual de instrucciones. Versión 4.0 9
© Technoton, 2017
Imagen 2 — Trasmisión de datos de bus CAN a bordo a Interfaz telemática S6
Informes, recibidos con MasterCAN, permiten controlar tanto el consumo instantáneo como
acumulativo durante la ruta (mire imagen 3).
Imagen 3 — Monitorear los datos de bus CAN con MasterCAN
Datos del bus CAN
Gráfico de consumo instantáneo de
combustible, información recibida desde
bus CAN

Conceptos fundamentales y características técnicas / Kit de suminstro
Interfaces de datos automotrices MasterCAN. Manual de instrucciones. Versión 4.0 10
© Technoton, 2017
1.2 Kit de suminstro
1 Interfaz de los datos del automóvil MasterCAN – 1 ud.;
2 Certificado con una hoja de configuraciones – 1 ud.;
3 Kit de montaje MasterCAN MK VDI 1 ud. contenido:
a) molex 4 pin - 2 ud.;
b) molex 6 pin - 2 ud.;
c) terminales - 5 ud.;
d) seguro contra cortocircuito (2 A) con soporte - 1 ud.;
e) cable - 17 ud.;
f) cables ciegos S6 CW * - 2 ud.;
g) apretado de cable - 20 ud.
Imagen 4 — Paquete de suministro de MasterCAN
* Contiene un terminal incorporado con resistencia 120 Ohm.
1
3e 2
3f
3d 3c 3b
3a
3g
La versión completa del manual de instrucciones se encuentra en el
centro de documentación Technoton http://docs.jv-technoton.com/


















