
Interactive Segmentation for Manipulation in Unstructured Environments
20
1 Robotics and Biology Laboratory – Department of Computer Science obotics and Biology Laboratory – Department of Computer Science Jacqueline Kenney Oliver Brock May 30 th , 2008 New England Manipulation Symposium Interactive Segmentation for Manipulation in Unstructured Environments
-
Upload
mari-solis -
Category
Documents
-
view
29 -
download
4
description
Interactive Segmentation for Manipulation in Unstructured Environments. Jacqueline Kenney Oliver Brock May 30 th , 2008 New England Manipulation Symposium. An Unstructured Enviroment. Gradient Example. Objects Can Have Similar Appearances. Vision Can Be Ambiguous. Motion Examples. - PowerPoint PPT Presentation
Transcript of Interactive Segmentation for Manipulation in Unstructured Environments

1Robotics and Biology Laboratory – Department of Computer ScienceRobotics and Biology Laboratory – Department of Computer Science
Jacqueline KenneyOliver Brock
May 30th, 2008
New England Manipulation Symposium
Interactive Segmentation for Manipulation in Unstructured
Environments

2Robotics and Biology Laboratory – Department of Computer Science
An Unstructured Enviroment

3Robotics and Biology Laboratory – Department of Computer Science
Gradient Example

4Robotics and Biology Laboratory – Department of Computer Science
Objects Can Have Similar Appearances
5Robotics and Biology Laboratory – Department of Computer Science
Vision Can Be Ambiguous

6Robotics and Biology Laboratory – Department of Computer Science
Motion Examples

7Robotics and Biology Laboratory – Department of Computer Science
Motion Example

8Robotics and Biology Laboratory – Department of Computer Science
Object SegmentationFitzpatrick & Metta
2004
Figure Ground SegmentationHayman & Eklundh
2002
Related Work: Perception Through Action
9Robotics and Biology Laboratory – Department of Computer Science
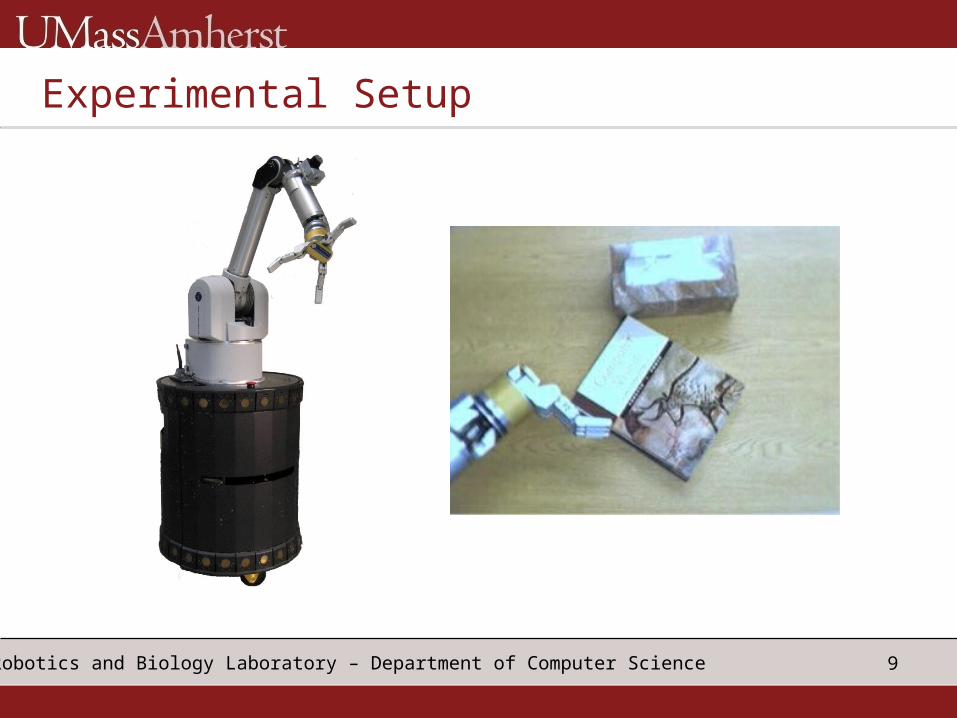
Experimental Setup

10Robotics and Biology Laboratory – Department of Computer Science
Interactive Segmentation
11Robotics and Biology Laboratory – Department of Computer Science
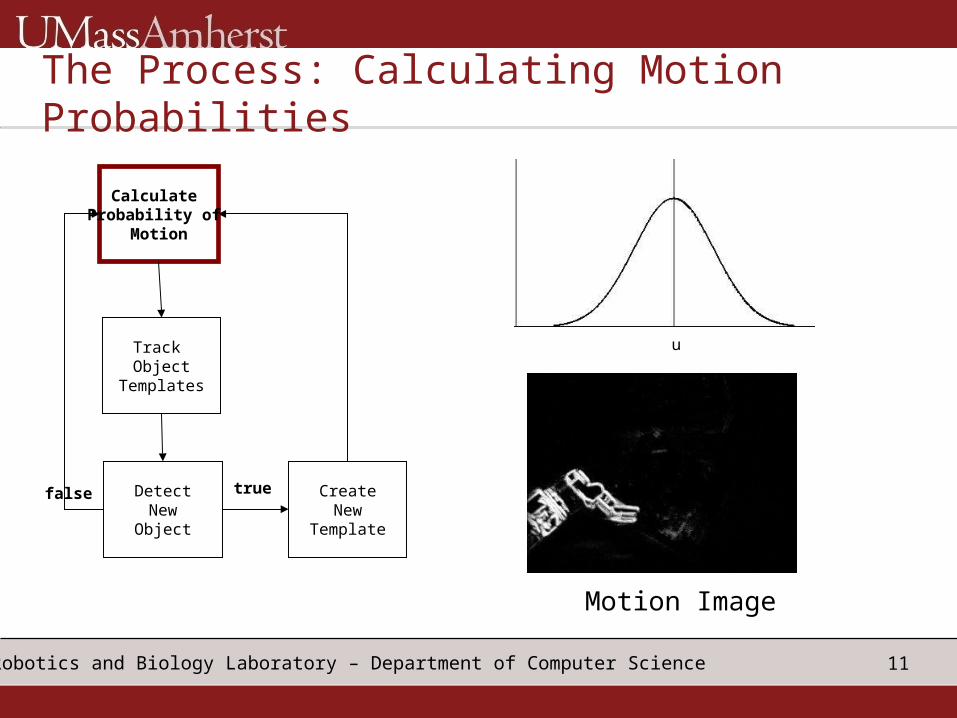
The Process: Calculating Motion Probabilities
Track Object
Templates
DetectNew
Object
CreateNew
Template
Calculate Probability of
Motion
false true
Motion Image
u

12Robotics and Biology Laboratory – Department of Computer Science
The Process: Tracking Object Templates
Track Object
Templates
DetectNew
Object
CreateNew
Template
Calculate Probability of
Motion
false true
Template
Current Motion Image
13Robotics and Biology Laboratory – Department of Computer Science
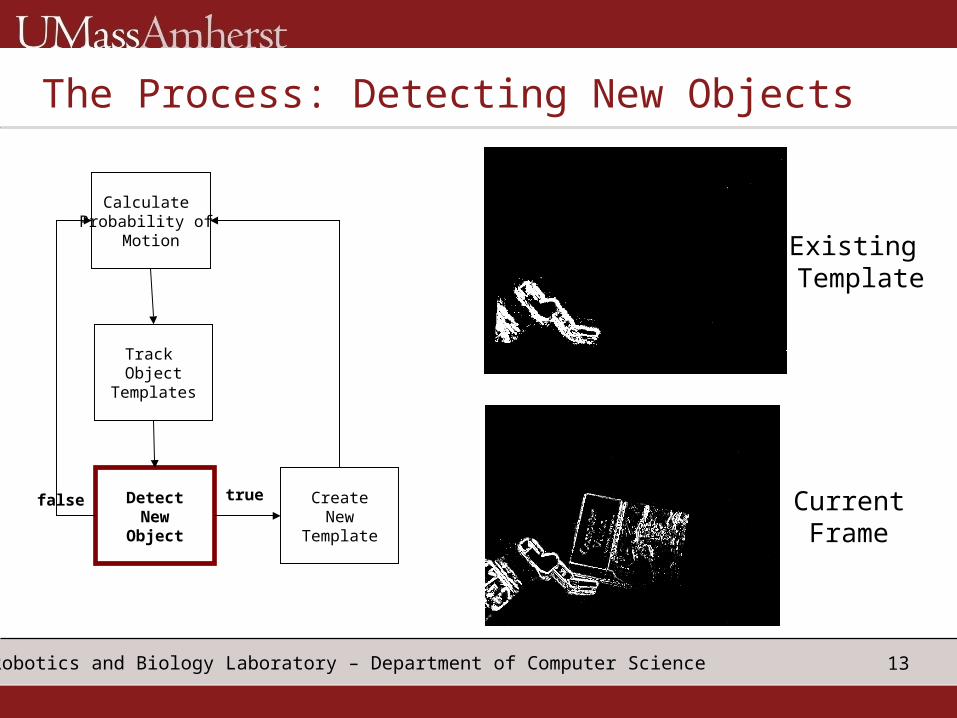
The Process: Detecting New Objects
Track Object
Templates
DetectNew
Object
CreateNew
Template
Calculate Probability of
Motion
false true
Existing Template
CurrentFrame

14Robotics and Biology Laboratory – Department of Computer Science
The Process: Creating a New Template
Previous Motion Image
CurrentMotionImage
- =
NewTemplate
Image

15Robotics and Biology Laboratory – Department of Computer Science
Segmentation Results

16Robotics and Biology Laboratory – Department of Computer Science
Updated Process
Track Object
Templates
DetectNew
Object
CreateNew
Template
Calculate Probability of
Motion
false
true
AccumulateMotion
Information
17Robotics and Biology Laboratory – Department of Computer Science
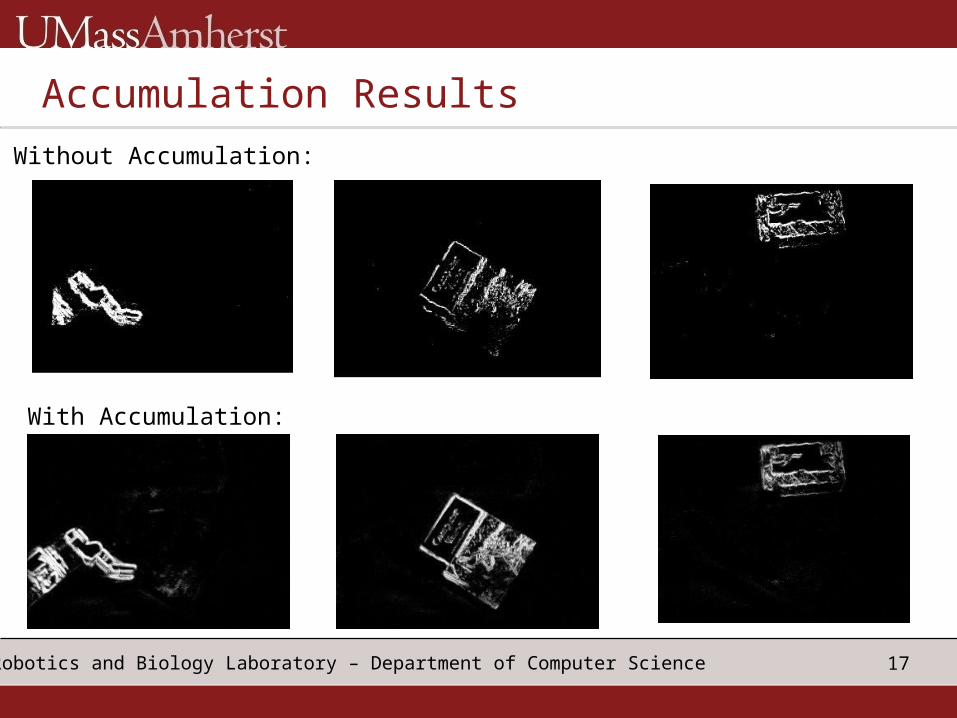
Accumulation ResultsWithout Accumulation:
With Accumulation:
18Robotics and Biology Laboratory – Department of Computer Science
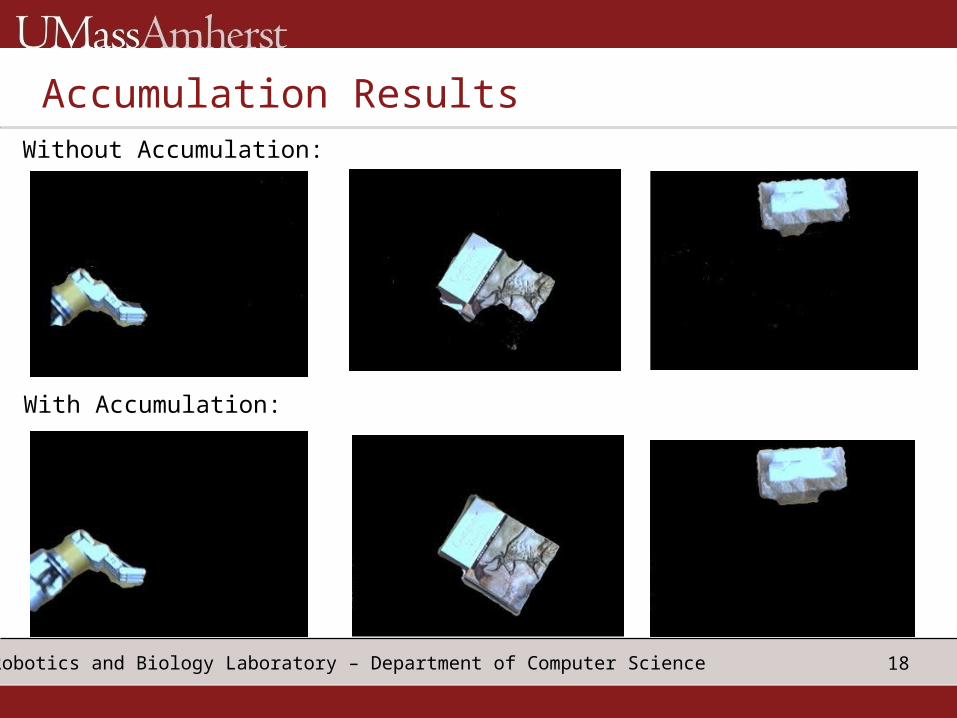
Accumulation ResultsWithout Accumulation:
With Accumulation:
19Robotics and Biology Laboratory – Department of Computer Science
Conclusion
•Progression of signals for segmentation•Gradient•Motion•Accumulation of Motion
•Robot can create signal!•Interaction can make vision easier

20Robotics and Biology Laboratory – Department of Computer Science
Thank You!










![F 6WXGHQW0RGHO2XWSXW Video Object Segmentation ...in different applications such as autonomous driving [4][26], and robot manipulation [5][10]. Object segmentation can aid in grasping,](https://static.fdocuments.us/doc/165x107/6027d8e7728689071e65a400/f-6wxghqw0rgho2xwsxw-video-object-segmentation-in-different-applications-such.jpg)







