Interacting agents with public and private information...
20
Interacting agents with public and private information (statistical mechanics perspective) A De Martino (SMC, Roma 1) mostly joint work with M Marsili (ICTP Trieste) http://chimera.roma1.infn.it/ANDREA A De Martino and M Marsili, J. Physics A 39 R465 (2006)
Transcript of Interacting agents with public and private information...

Interacting agents with public and private information(statistical mechanics perspective)
A De Martino (SMC, Roma 1)
mostly joint work with M Marsili (ICTP Trieste)
http://chimera.roma1.infn.it/ANDREA
A De Martino and M Marsili, J. Physics A 39 R465 (2006)

Helbing+2 02Selten+8 04
1
2
3
4
5
6
7
8
9
0 100 200 300 400 500
Pla
yer
Iteration t
1
2
3
4
5
6
7
8
9
500 600 700 800 900 1000
Pla
yer
Iteration t
1
2
3
4
5
6
7
8
9
1000 1100 1200 1300 1400 1500
Pla
yer
Iteration t
0
1
2
3
4
0 500 1000 1500 2000 2500
Ch
an
gin
g R
ate
user-speccorrected
own payoff both similar

P1(n1) = P0
1 ! P1
1 n1
P2(n2) = P0
2 ! P1
2 n2
! feq
1=
P 12
P 11
+ P 12
+1
N
P 01 " P 0
2
P 11
+ P 12
0
1
2
3
Treatment 1 Treatment 2 Treatment 3 Treatment 4 Treatment 5
0 500 1000 1500 2000 2500
Ove
rre
actio
n
Iteration t
user-speccorrected
own payoff
both similar
“congestion game”

in financial markets (see T Odean’s group work)
people systematically overweight some typesof information and underweight others ; overweight their successes and underweight their failures ; overestimate the precision of their information ; etc.
}overconfidence(increases trading volumes,decreases exp. utility, causesunderreaction to realinformation, etc.)
“hold losers/sell winners”

a. when is convergence to an optimal state possible?b. when there are many, which one is selected?c. can one supply information so as to stabilize decision dynamics?d. how do information schemes affect the dynamics?e. is there an optimal information scheme?
some questions
1 agent , 1resourceN agents , 1 resourceN agents , O(N) resources

learning? (backward-looking induction vs forward-looking deduction)
one agent , choices : s ! {+,"}
learning :
decision : P (s(t) = s) ! ![ys(t)]
ys(t + 1) ! ys(t) = us(t)
ys(t + 1) ! ys(t) = us(t)!s(t),s
(full)
(partial)
payo!s us(t) i.r.v. with Eus = vs (v+ > v!
)
learn the best choice?
full + !(y) = ey
!
(" > 0) ! yes
partial + !(y) = y! (" = 1) ! yes
Rustichini 99

one agent , state a ! {H, L} (well/badly informed)
forecasts an event ! correctly with prob. a
can he learn a from his past success? s(t) =!
t!<t
!!(t!),f(t!)
learning : P [a = H|s(t) = s] ! !!(t|s)
=!sHs(1 ! H)t!s"0
!sHs(1 ! H)t!s"0 + Ls(1 ! L)t!s(1 ! "0)
! = 1 ! rational ; ! > 1 ! underreact to errors
! if a = L the updated posterior converges a.s. as
!!(t|s) !
!
"
#
"
$
1 for " > "!
!0 for " = "!
0 for " < "!
Gervais-Odean 01
correct priors,biased updates

1 to N agents
choices ai ! {"1, 1} , A =!
j
aj
payo!s ui(ai, a!i) =N ! aiA
2
decision : P (ai(t) = a) ! eyia(t)
(full)
learning : yia(t + 1) ! yia(t) =!
N
N ! aA(t)
2
Ui = yi+ ! yi! " Ui(t + 1) ! Ui(t) = !
!
NA(t)
(optimal learning)

0 2 4 6s0
5
10
15!c(s)
2 4 6 8 10!
0
0.5
1
"2 /#2
s=1/2s=1 ! < !c ! !
2" N
! > !c ! !2" N
2
Fluctuations : !2 =
!
i
(!a2
i " # !ai"2) =
!
i
(1 # !ai"2)
yia(0) randomly sampled from G(0, s2)
so the larger the spread of i.c.’s (heterogeneity), the smaller the fluctuations but the steady state is not optimal
Optimal state :
!
N!1
2do a
N+12
do !a
! !2
= 1 NNE " eN!

Ui(t + 1) ! Ui(t) = !!A(t)/N , A(t) =!
j
aj(t) , ! > 0
i is in hereWhy can’t they get to Nash?
remove self-interaction (learn to respond to others, not to yourself)
! ! {0, 1}Ui(t + 1) ! Ui(t) = !
!
N[A(t) ! !ai(t)]
!Ui(t + 1)" # !Ui(t)" = #!
N[!
j
mj # !mi] mi = !ai"= !
!
N
!H
!mi
H =1
2
!
"
i
mi
#2
!
!
2
"
i
m2
i
! = 0 ! mi = 0
! = 1 : H is harmonic ! mi = ±1
! !2
= N
! !2 = 1 (odd N)
minima :

0
1
2
3
Treatment 1 Treatment 2 Treatment 3 Treatment 4 Treatment 5
0 500 1000 1500 2000 2500
Ove
rre
actio
n
Iteration t
user-speccorrected
own payoff
both similar
partial full NE
externally supplied, unrealistic(it is seen as a 1/N effect, “price-taking”)

buy/sell difference
first gap
AZN, LSE 1999-2002
Farmer+2 04
price
old price price
Large price variation =“closing” of the first gap

Agents areheterogeneousselfishinductive
Resources areequivalentscarce(distributed)
No direct interaction
N agents, M resources and a matrix of dependencies {!µi }
N ! "random {!µ
i }Typical properties :
Resources
Load
{Qµ}
Q
N = cM

N drivers on a grid of M streetsone driver’s
feasible routes
another driver’sfeasible routes
A
BA
B
route for i : !"i = {"µi }
c = N/M = density of vehicles

Aµ(t) = Qµ(t) ! Q
Resources
Load
{Qµ}
Q
how evenly are resources used?
how large are fluctuations?
!i(t) !!
µ
aµi (t)Qµ(t) "
!
i
!i(t) !!
µ
Qµ(t)2
!2 =1
M
!
µ
!(Qµ)2" # !Qµ"2
H =1
M
∑
µ
!Aµ"2

two feasible routes per agent : !"is , s ! {+,"}
decision : P (si(t) = s) ! e!Uis(t)
! ! 0
learning : Uis(t + 1) ! Uis(t) = !
1
M
!
µ
!µisQ
µ(t) +1
2(1 ! "s,si(t))zis(t)
Qµ(t) =!
i
!µis"s,si(t)
“congestion game”
information noise
! = 0
! > 0
! < 0
: unbiased information: overestimates unused routes: underestimates unused routes
!!ig(n)" = "
!!ig(n)!jh(m)" = !"ij"gh"nm
! = 0 : same information (biased or not) for all drivers
! > 0 : user-specific information

! = 0
Not optimal butnot that bad
! = ! = 0
! = !
Disaster for c > cc
0.1
1
10
100
!2
/N
1/"=0
"=0
10!2
10!1
100
101
102
c
0.0
0.1
0.2
0.3
0.4
0.5
H/N
cc ! 3
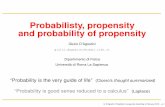
theory (steady state) : the dynamics minimizes H (approx.)
Uncorrelated result : cc = 2.9638 . . .
noiseless case
(high density)
inductive perform worse than random at high densities!
problem : the quenched disorder is spatially correlated ...

10!2
10!1
100
101
c
0.0
0.2
0.4
0.6
0.8
1.0
!2
/N
random drivers
adaptive drivers, "=0
adaptive drivers, "=#2
! = !2
! = 0 ! = 0
`pessimist’ information bias reduces fluctuations
theory (steady state) : the dynamics minimizes fluctuations
biased case
high car density (hard phase)
calibrated user-specific noise reduces fluctuations
10!1
100
101
102
103
104
!
10!1
100
101
"2/#
100
102
104
! teq
1/4
10!1
101
! = 0
noisy case

0
1
2
3
Treatment 1 Treatment 2 Treatment 3 Treatment 4 Treatment 5
0 500 1000 1500 2000 2500
Ove
rre
actio
n
Iteration t
user-speccorrected
own payoff
both similar
10!1
100
101
102
103
104
!
10!1
100
101
"2/#
100
102
104
! teq
1/4
10!1
101
! = 0
10!2
10!1
100
101
c
0.0
0.2
0.4
0.6
0.8
1.0
!2
/N
random drivers
adaptive drivers, "=0
adaptive drivers, "=#2
! = !2
! = 0
! = 0
noiseless case = minH
min!2

minH
min!2
0.01 0.1 1 10 100!
0
0.5
1
"
RS
RSB
ERGODIC
NON ERGODIC
1/c
!=
!"/2
min(1 ! !)H + !"2
no PT(freezing, exp. many SS, ...)
PT(no freezing)

![lezione2 2015.ppt [modalità compatibilità]oberon.roma1.infn.it/metodiastrofisicaspaziale/lezione2_2015.pdfStratospheric Balloons • The pressure where equilibrium is reached (at](https://static.fdocuments.us/doc/165x107/6127f7c28ef4650ea765ee3f/lezione2-2015ppt-modalit-compatibilit-stratospheric-balloons-a-the-pressure.jpg)