
Intelligent robotic chapter 2 distribute
19
1
-
Upload
figo-lee -
Category
Technology
-
view
159 -
download
0
Transcript of Intelligent robotic chapter 2 distribute

1

2
The study of the position and orientation of a robot hand with respect to a reference coordinate system, given the joint variables and the arm parameters, OR
The analytical study of the geometry of motion of a robot arm with respect to a reference coordinate system.
Without regard the forces of moments that cause the robot motion.
It is the first step towards robotic control.

3
What you are given:
The length of each link
The angle of each joint
What you can find:
The position of any point (i.e. it’s (x, y, z) coordinates

4
Between two frames, the is a kinematic relationship either a translation, rotation or both. The relationship can be describe by a transformation matrix.
z0
x0
y0
Translation
and rotation
z2
x2
y2Rotation Translation
Rereference
frame
{A}{B}
{C}
{D}
Note: {D} = Frame D

5
xy
A
Buv RPP
uv
A
Bxy QPP
RRRQ B
A
TA
B
A
B
A
B
1
xy
A
B
y
x
v
u
uv RPp
p
p
pP
)cos()sin(
)sin()cos(
v
u
Puv
x
y
Pxy
{A}
{B}
RA
Bdescribes the rotations of {B} w.r.t. {A}Note:

6
uvw
w
v
u
z
y
x
xyz RP
p
p
p
p
p
p
P
wzvzuz
wyvyuy
wxvxux
kkjkik
kjjjij
kijiii
z
x
y
Puvw
Pxyz
xyz
A
Buvw RPP
uvw
A
Bxyz QPP
RRRQ B
A
TA
B
A
B
A
B
1

7
Rotation transformation matrices
CosSin
SinCosRx
0
0
001
)(
CosSin
SinCos
Ry
0
010
0
)(
100
0
0
)( CosSin
SinCos
Rz
Roll
Yaw
Pitch
z
x
y
Rotation about x-axis by degrees - Yaw
Rotation about y-axis by degrees - Pitch
Rotation about z-axis by degrees - Roll

8
Roll-pitch-yaw angles (Z-Y-X Euler angle-Relative axis)
It provides a method to decompose a complex rotation into
three consecutive fundamental rotations; roll, pitch, and yaw.
Use post multiplication rule.
Ruvw is mobile with respect to the Rxyz
)()()()( xyzuvw RRRmobileR
CosSin
SinCos
CosSin
SinCos
CosSin
SinCos
0
0
001
0
010
0
100
0
0

9
Yaw-pitch-roll angles (X-Y-Z fixed angle)
Representation in yaw-pitch-roll angles allows complex rotation
to be decomposed into a sequence of yaw, pitch and roll about the
x, y and z axis.
Use pre-multiplication rule.
)()()()( XYZuvw RRRfixedR
)()( mobileRfixedR uvwuvwConclusion:
CosSin
SinCos
CosSin
SinCos
CosSin
SinCos
0
0
001
0
010
0
100
0
0

10
Z-Y-Z Euler angle
Read the Z-Y-Z Euler angles on page 30 (M. Zhihong)

11
Find the position of point P=[10 10] with respect to the global axis after it is transformed/rotated by [pi/3]
Find the position of point P=[10 10 10] with respect to the global axis after it is transformed by [pi/4; pi/3; pi/6]
12
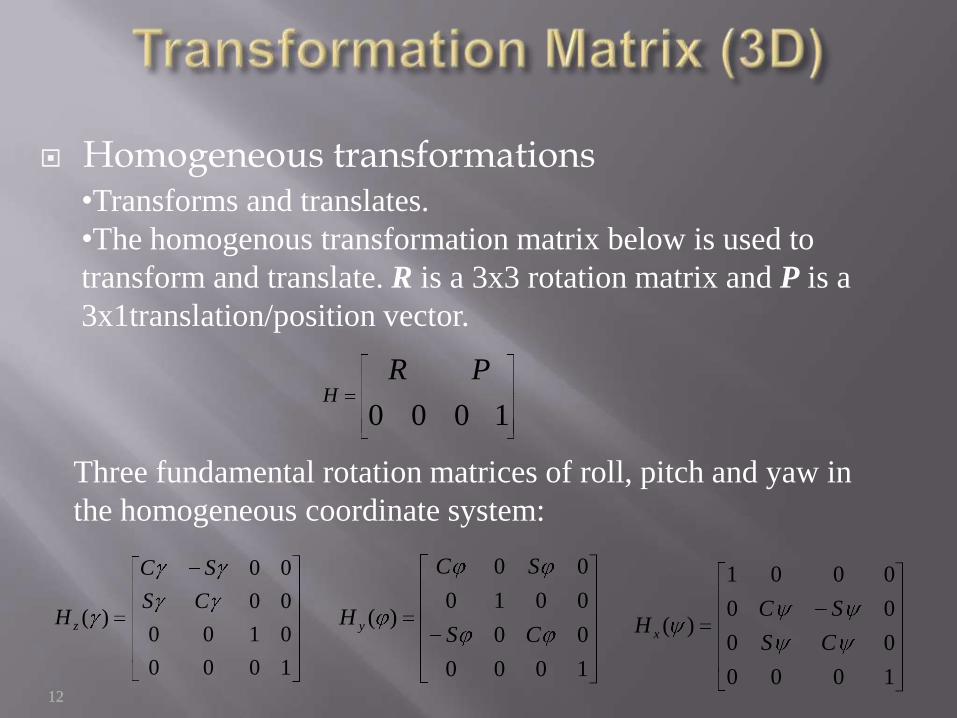
Homogeneous transformations•Transforms and translates.
•The homogenous transformation matrix below is used to
transform and translate. R is a 3x3 rotation matrix and P is a
3x1translation/position vector.
1000
PRH
1000
00
00
0001
)(CS
SCH x
Three fundamental rotation matrices of roll, pitch and yaw in
the homogeneous coordinate system:
1000
00
0010
00
)(CS
SC
H y
1000
0100
00
00
)(CS
SC
H z

13
Homogeneous transformations
Three fundamental rotation matrices of roll, pitch and yaw Hrpy
in the homogeneous coordinate system:
1000
z
y
x
rpyPCCSCS
PSCCSSCCSSSCS
PSSCSCCSSSCCC
H
R
A point B’ can be found from the following relationship:
BHB rpy'

14
Homogeneous transformations
Translation without rotation
1000
P100
P010
P001
Hz
y
x
P
Y
X
Z
O
N
A
1000
0aon
0aon
0aon
Hzzz
yyy
xxx
A
Y
X
Z
O
N
Rotation without translation

15
Example 1: Find a point B’ in {B} w.r.t to the reference frame {A} if the origin of {B} is (5,5,5) . Given B=(1,2,3). Given .0;0;0
(5,5,5)
B(1,2,3)
B’

16
Solution
1000
5100
5010
5001
H
HBB'
1
8
7
6
1
3
2
1
1000
5100
5010
5001
'B
17
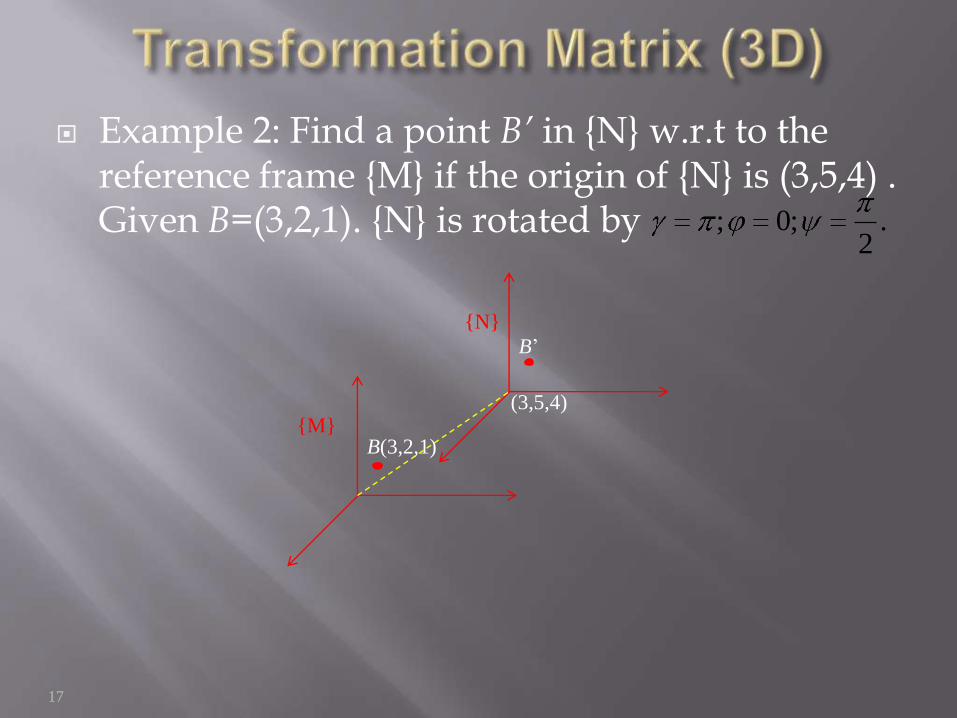
Example 2: Find a point B’ in {N} w.r.t to the reference frame {M} if the origin of {N} is (3,5,4) . Given B=(3,2,1). {N} is rotated by .
2;0;
(3,5,4)
B(3,2,1)
B’
{M}
{N}
18
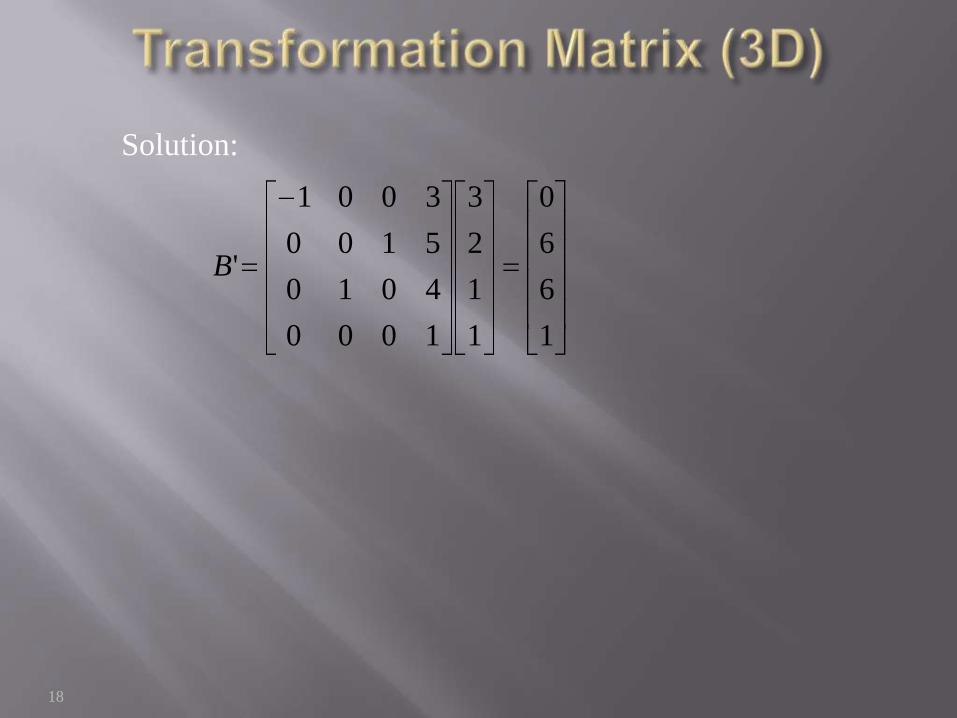
1
6
6
0
1
1
2
3
1000
4010
5100
3001
'B
Solution:

19
Example 3: Find a point P’ in {N} w.r.t to the reference frame {M} if the origin of {N} is (3,5,4) . Given B=(3,2,1). {N} is rotated by .
2;
3;
(3,5,4)
B (3,2,1)
B’
{M}
{N}
B’ =[ 0.7679
4.8660
1.0000
1.0000]


















