INTEC GmbH - · PDF filetory from Romanesque to Romanticism. Founded in 1067 by Count Ludwig,...
16
SIMPACK User Meeting 2004 The history of the Wartburg and the wall paintings in the Wappensaal gave the perfect backdrop for the 6 th SIM- PACK User Meeting. Highlights of the event were the presentations of the new SIMPACK 8.7, Code Export and SIMPACK Engine. The user presenta- tions demonstrated modelling and simulation work at the highest level with the use of co-simulation or HIL/SIL applications discussed in more than 10 papers. The Wartburg castle chronicles the his- tory from Romanesque to Romanticism. Founded in 1067 by Count Ludwig, the Wartburg, with the Lutherstube, was witness to the reformation and was also the location of the first democrati- cally assembled meeting of citizens for the unification of the small individual states in 1817. The two days of the User Meeting, held November 9-10, offered a full program, including the direction in which INTEC is heading, and 30 presentations from SIMPACK users - coming from both in- dustry and universities. The User Meeting presentations can be downloaded from www.simpack.com (software, publications). INTEC ON TRACK After the welcome speech from L. Mauer to the attendees, this year coming from 10 countries, A. Eichberger reviewed the activities at INTEC since the last User Meeting. He also gave an insight into the commercial performance of INTEC, which shows continuous growth in all business divisions. Our strength in international markets has been further developed with new partners including ATES, ESP and IST. He highlighted the customer driven SIMPACK develop- ments in Release 8.7, which were to be presented at the User Meeting. A key feature of INTEC’s future objectives is to provide the customers with interfaces, which allow flexibility in the overall CAE process. VOLUME 8, SECOND ISSUE DECEMBER 2004 SIMPACK User Meeting 2004 at the Wartburg, Eisenach, Germany Editor INTEC GmbH, Argelsrieder Feld 13, 82234 Wessling, Germany » USER MEETING ..........................01 Dr. Lutz Mauer, INTEC GmbH SIMPACK User Meeting 2004 at the Wartburg » CAD INTERFACE.........................04 Dr. W. Trautenberg, INTEC GmbH CatSIM V5, Interface between CA- TIA V5 and SIMPACK » REALTIME...................................05 Dr. Alex Eichberger, INTEC GmbH SIMPACK Realtime Car Model VDYM » WHEEL/RAIL ..............................06 Dr. Ch. Weidemann, INTEC GmbH What‘s new in SIMPACK 8.7 Wheel/ Rail » SOLVER ......................................08 Dr. Stefan Dietz, INTEC GmbH The Powerful Linear Subsystem Solver for Flexible Bodies » SIMPACK NVH .........................010 Steven Mulski, INTEC GmbH Noise, Vibration, Harshness - NVH
-
Upload
nguyencong -
Category
Documents
-
view
222 -
download
3
Transcript of INTEC GmbH - · PDF filetory from Romanesque to Romanticism. Founded in 1067 by Count Ludwig,...

SIMPACK User Meeting 2004
The history of the Wartburg and the wall paintings in the Wappensaal gave the perfect backdrop for the 6th SIM-PACK User Meeting. Highlights of the event were the presentations of the new SIMPACK 8.7, Code Export and SIMPACK Engine. The user presenta-tions demonstrated modelling and simulation work at the highest level with the use of co-simulation or HIL/SIL appli cations discussed in more than 10 papers.
The Wartburg castle chronicles the his-tory from Romanesque to Romanticism. Founded in 1067 by Count Ludwig, the Wartburg, with the Lutherstube, was witness to the reformation and was also the location of the fi rst democrati-cally assembled meeting of citizens for
the unifi cation of the small individual states in 1817.The two days of the User Meeting, held November 9-10, offered a full program, including the direction in which INTEC is heading, and 30 presentations from SIMPACK users - coming from both in-dustry and universities. The User Meeting presentations can be downloaded from www.simpack.com (software, publications).
INTEC ON TRACKAfter the welcome speech from L. Mauer to the attendees, this year coming from 10 countries, A. Eichberger reviewed the activities at INTEC since the last User Meeting. He also gave an insight into the commercial performance of INTEC, which shows continuous growth
in all business divisions. Our strength in international markets has been further developed with new partners including ATES, ESP and IST. He highlighted the customer driven SIMPACK develop-ments in Release 8.7, which were to be presented at the User Meeting. A key feature of INTEC’s future objectives is to provide the customers with interfaces, which allow fl exibility in the overall CAE process.
VOLUME 8, SECOND ISSUE DECEMBER 2004
SIMPACK User Meeting 2004 at the Wartburg, Eisenach, Germany
EditorINTEC GmbH, Argelsrieder Feld 13, 82234 Wessling, Germany
» USER MEETING..........................01
Dr. Lutz Mauer, INTEC GmbHSIMPACK User Meeting 2004 at the Wartburg
» CAD INTERFACE.........................04
Dr. W. Trautenberg, INTEC GmbHCatSIM V5, Interface between CA-TIA V5 and SIMPACK
» REALTIME...................................05
Dr. Alex Eichberger, INTEC GmbHSIMPACK Realtime Car Model VDYM
» WHEEL/RAIL ..............................06
Dr. Ch. Weidemann, INTEC GmbHWhat‘s new in SIMPACK 8.7 Wheel/Rail
» SOLVER ......................................08
Dr. Stefan Dietz, INTEC GmbHThe Powerful Linear Subsystem Solver for Flexible Bodies
» SIMPACK NVH .........................010
Steven Mulski, INTEC GmbHNoise, Vibration, Harshness - NVH

2
WORKING WITH SIMPACK 8.7W. Trautenberg, director of SIMPACK development indicated that more than 400 changes have been implemented for the brand new release 8.7. All of which have been strongly driven by the wants and requirements of our custom-ers. SIMPACK 8.7 is both evolutionary and revolutionary. Some of the evolu-tionary highlights are:- Scaled transient Animation- Copy and Paste of Bodies- Virtual Suspension- Linux PortThe revolutionary features have been in the fi elds of the solver, new modules and in the software architecture:- Linear subsystem solver for fl ex. bodies- SIMPACK Engine- New SIMPACK Plot (pre release)- CatSIM V5 Interface to CATIA V5
SIMPACK CODE EXPORTF. Kohlschmied presented the current development stage of SIMPACK’s Code Export functionality. SIMPACK Code Export is used for the automatic gen-eration of the dynamic equations of (nearly) any SIMPACK model as source code. The main features are:- optimised code for saving simulation
time (Fortran and C) - huge subset of SIMPACK elements are
supported- support of SIMPACK User Routines- usage of model specifi c database- interface to MATLAB and ETAS HIL
environment- support of elastic bodies
LINEAR SUBSYSTEM SOLVER S. Dietz presented a new solver tech-nology for SIMPACK models contain-ing fl exible bodies, described in modal co-ordinates. The basic idea of this new method is to treat the modal description of the fl exible bodies as a linear subsystem, which can be solved analytically and coupled via a co-simu-lation to the non-linear system.
SIMPACK ENGINEM. Schittenhelm gave a very exciting presentation on the product suite SIM-PACK Engine, which covers the most
important areas of combustion engines and the corresponding excitations:- Valve Train (fl ex bodies for valve shaft,
valve spring, rocker and camshaft) - Timing Mechanism (chain, gear
wheels, tensioners) - Crank Train (fl exible bodies for the
crank shaft, cylinder block, connect-ing rod and crank shaft bearings)
For modelling these components a number of very sophisticated modelling elements have been developed:- 2D and 3D direct contact between
fl exible bodies- Detailed Hydraulic Lash Adjuster - Dynamic Valve Spring (1D multi-mass)- Dynamic Valve Spring (SIMBEAM
model including winding contact) - Gearwheel (spur and helical, consider-
ing multi-tooth contact and backlash)- Chain (incl. sprocket wheels, guides)- Implementation of the IST modelling
levels Impedance and Reynolds equa-tions for HD bearings
Besides detailed analysis of individual components, the complete engine behaviour, with all the corresponding dynamic interactions, is an impressive feature of SIMPACK Engine.
QUALITY ASSURANCEC. Schwientek introduced the quality management process, which has been established for the continuous qual-ity assurance in the SIMPACK Software. One of the important aspects is the extension of the SIMPACK test model and test case library. The library models should cover all modelling and solver functionalities in SIMPACK. Complex customer models are most welcome, which can be used for testing at INTEC. The QM workfl ow includes tests at dif-ferent levels: - Automated processing of all test
models on all supported platforms- Automated comparison of the test
and reference results.- Testing of the GUI- Acceptance stipulations
AEROSPACE APPLICATIONS The year’s best received presenta-tion was from M. Hilchenbach, who is responsible for the landing gears of
Martin Hilchenbach, Max-Planck-Institut für Sonnensystemfor-schung, Katlenburg-Lindau, Ger-many
Alexandra Ratering, University Stuttgart, Germany
SIMPACK»News, December 2004
» USER MEETING
Dr. Lutz MauerINTEC GmbH
Spencer Salter, Land Rover, Warwick, UK

3
the Rosetta comet lander, which was launched in Jan. 2003. The landing ma-noeuvre, however, will not happen until 2014. The other two aerospace contri-butions were from M. Spieck (DLR) and R. Lernbeiss (TU Wien), who presented dynamic simulations of on-ground dy-namics of aircraft landing gear.
AUTOMOTIVE USER PRESENTATIONSEckhard Rossmann (DaimlerChysler) presented a detailed study of the brak-ing of commercial vehicles. S. Tuzcu (IST) explained the theory and application of the modelling of hydrodynamic bear-ings - now available in SIMPACK Engine. H. Weinfurter (MAN) looked at the control design for steer-by-wire trucks, carried out co-simulation with MATLAB. S. Salter (Land Rover) showed us the po-tential of SIMPACK in the improvement of vehicle ride comfort and drivability, particularly impressive were the amaz-ing animations, which he showed. We congratulate A. Al-Sened (MAN B&W), who was the fi rst user to give a presen-tation on the application of SIMPACK Engine. R. Frith and J. Knapton (Jordan) gave us an insight into the optimisation tasks required by F1 racing cars to fi nd the right balance between transient and steady state behaviour.
RAILWAY USER PRESENTATIONSThree of the railway presentations, J. Wingren (Bombardier), R. Gansekow (Siemens) and J. Perez (MMU) dealt with the UK vehicle acceptance proce-dures, which include dynamic gauging requirements, the sway test and wheel unloading. Perez presented a modelling strategy which works with vehicle and test case database substructures (Bogie rotation test, DQ/Q and Y/Q test, sway test and ride comfort simulations). G. Schupp (DLR) gave an overview of his doctoral work on the bifurcation analy-sis for the detection of periodic solutions (limit cycles). P. Häse went into detail on the investigations he undertook on shock loads in a drive chain caused by a short circuit in the asynchronous mo-tor. One of the highlights was the pre-sentation from Marc Stiepel (Alstom), he showed the simulation of freight
wagons with friction elements such as chain link suspended leaf springs. The simulation runs covered track lengths of 70 km to obtain the complete UIC 580 assessment. G. Schandl presented the technique of equipping future railway vehicles with piezo actuators for active vibration control.
MACHINERY DYNAMICSAn insight into machinery dynamics was given to us by M. Weber (Hilti) and P. Gomez (Freudenberg). H. Bork (Siemens) looked at control systems for linear axis problems and Alexandra Rate-ring (University Stuttgart) investigated a parallel mechanism. A. Heckmann (DLR) extended the modal description of fl exible bodies to use with thermal modes, in the improvement of the posi-tional accuracy of gantry systems.
WIND TURBINESThe two papers presented by D. Möller (RWTH Aachen) and T. Schulze (TU Dresden) gave an impressive look at the state of the art dynamics used for the simulation of drive line dynamics, which include the interactions with the gen-erator and the control circuit. Schulze showed, that the fl exible gear box mounting and the axial movements of helical gears have to be taken into ac-count to obtain realistic natural modes for the drive line system.
BIOMECHANICSTwo university contributions explored the special problems encountered in the modelling of humans for the simu-lation in the fi eld of bio-mechanical movements.
OUTLOOKWe would like to thank all the User Meeting attendees, whether the con-tribution was through a presentation or just for coming to listen. This year’s best ever User Meeting attendance is an incentive for INTEC to strive to of-fer the best possible SIMPACK customer service. We’re already looking forward to the next SIMPACK User Meeting in Spring 2006, and seeing you again or maybe for the fi rst time.
» USER MEETING
Dr. Lutz MauerINTEC GmbH
Richard Frith, Jordan Grand Prix, Silverstone, UK
Tobias Schulze, TU Dresden, Ger-many
The Wartburg in Eisenach

4
SIMPACK»News, December 2004
Exporting a CATIA V5 Assembly with CatSIM V5
» CAD INTERFACE
Dr. Wolfgang TrautenbergINTEC GmbH
CatSIM V5, Interface between CATIA V5 and SIMPACKIn mid 2004 INTEC became a Dassault Systèmes CAAV5 adopter and began the development of CatSIM V5, the interface between CATIA V5 and SIM-PACK. CatSIM V5 enables engineers to use CATIA V5 models with SIMPACK, and designers to perform interference and motion path analyses in CATIA V5, based on results from a simulation with SIMPACK. By using CatSIM V5 the development process can be sped up and the time consuming manual data input can be automated.
INTEC is pleased to announce that in mid 2004 it became a Dassault Sys-tèmes CATIA V5 Application Architec-ture (CAAV5) adopter.The partnership, which includes the right to develop applications, based on Dassault Systèmes‘ successful CATIA V5 environment, was essential in the process of developing CatSIM V5, the interface between SIMPACK and CATIA V5.CatSIM V5, which is seamlessly inte-grated into CATIA V5, enables design-ers and engineers to work together within the CATIA V5 framework by exchanging models and simulation results.Engineers can access the CATIA V5 models in the CATIA V5 GUI and ex-port them to SIMPACK. The process of defi ning a SIMPACK simulation model based on a CATIA V5 model is there-fore greatly simplifi ed and sped up. Also error-prone manual data input, e.g. mass data and marker positions, is no longer necessary since the data is automatically generated by CatSIM V5 based on the CATIA model.In SIMPACK these models can be com-pleted with joints, drives, forces, con-tact elements and even fl exible bodies. The full capabilities of the SIMPACK solver are then available for perform-ing analyses with these models. The simulation results can be viewed both in the SIMPACK post-processor as well as in the CATIA V5 environment.Designers can view and use the simu-lation results in their native CATIA V5 environment and thus gain better insight into the behaviour of their
design. Typical uses in the CATIA V5 environment for the motion results generated by SIMPACK are interfer-ence and collision analyses, as well as the generation of motion paths of parts and assemblies.Since the interface is bi-directional, updates of the design model created and maintained in CATIA V5 can be easily incorporated into the SIMPACK model. This can be done without hav-ing to completely redefi ne the SIM-PACK model. The initial releases of CatSIM V5 can be used for generating SIMPACK bodies, generating SIMPACK models, export-ing geometry for contact simulation and for importing motion data into CATIA V5, all based on CATIA models. When exporting bodies, the user can either select a single CATIA part (CatPart), multiple CATIA parts or CATIA assemblies (CatProduct) and subassemblies to be written out as a single SIMPACK Body. The Body mass properties, co-ordinate systems and the geometry are exported to the SIM-PACK database.The individual bodies exported can then be used in different SIMPACK models, e.g. a car suspension model and a full vehicle model. SIMPACK models are generated by CatSIM V5 when exporting assemblies from CATIA V5.All parts of models are exported in-cluding their absolute positions and orientations. The generated models can be used as stand-alone SIMPACK models or SIMPACK substructures.The benefi ts of CatSIM V5 include - application of existing design mod-
els in SIMPACK simulations,- the elimination of time consuming
and error prone manual data input when generating simulation models,
- quick and easy updates of the simu-lation model after design changes
- and an improved insight into the design, due to animation and in-terference analysis results based on simulation data.
CatSIM V5 will be available in early 2005.
Exporting Contact Geometry with CATIA V5

5
Based on the unique SIMPACK Code Export the INTEC product range has been extended by a completely new realtime car model called SIMPACK VDYM. INTEC has partnered up with ETAS to come up with a highly so-phisticated, and extendable vehicle model. SIMPACK VDYM is completely integrated in MATLAB/Simulink. It’s main competitive edges are scalable model accuracy, realtime performance, open model structure, comprehensive parameterisation features and its close connection to SIMPACK off-line simu-lation models.
APPLICATION FIELDS AND MAIN DESIGN GOALSThe design goals of SIMPACK VDYM have been chosen to be in-line with the application fi elds of mechatronic vehicle design. The model has to support and accompany the V-cycle development process in all stages for applications such as ABS, ESP, ABC, Steer-by-Wire, Brake-by-Wire, Drive Train, ECU-Networks, as well as ECU-function evaluation, like test reference for ECUs, model-, software-, hardware-in-the-loop confi gurations and off-line and realtime simulations. Also ECU-calibration in advance, which requires fi ne tuning and optimisation of ECU-controller parameters has to be supported. Finally, general func-tional mechatronic design studies for handling vehicle dynamics and concept studies have to be feasible by vehicle dynamics specialists and controller de-sign specialists as well. The wide range of applications for one model required a scalable model architecture ranging from a functional model to a highly detailed model such as in an off-line multi-body model ap-proach. This goal has been achieved by taking a detailed SIMPACK model and exporting this model using Code Export. Another goal was a reliable and easy parameterisation process for physical parameters and model struc-ture. The model was required to be open end extendable, so that model parts can be exchanged or modifi ed. All model parameters have to be ac-
cessible during off-line and realtime simulation without the need of code re-generation and re-compilation. The integration and simulation platform should be independent from the hard-ware and therefore MATLAB/Simulink was chosen as the quasi standard. Fi-nally, the model execution has to be possible on any standard industrial hardware and the sample times were aimed below 1 ms.
BASIC STRUCTURE OF SIMPACK VDYMAt the top-level, VDYM consists of a driver, an environment and a vehicle block. The driver allows for automatic and manual transmissions with gear switch logic, it includes a lateral and longitudinal controller and much more. The environment block contains track, friction and height defi nitions. The vehicle block contains the SIMPACK based vehicle dynamics as well as the engine model, drive-train model and brake hydraulics. The vehicle dynamics model is a S-function whereas all other model components are Simulink based with open structure and open source. The minimum requirements to run the model is having Simulink installed on your computer. Different add-ons, in-clude a graphical user interface, ani-mation, ADAMS/Car connector and a realtime connector, are available for SIMPACK VDYM.In addition to the ready-to-use vehicle dynamics model, INTEC offers non-standard vehicle structures such as trucks, busses, motorbikes or substruc-tures, for example 3D-drive trains for VDYM on a consultancy basis.
INTRODUCTORY DAYA free of charge SIMPACK VDYM information day to SIMPACK VDYM will be offered for interested par-ties. The exact date will be disclosed soon. We recommend contacting our Marketing Manager Ms. Erni Engert ([email protected]) in order to book in advance.For more information on functionality and prices, please send an e-mail to [email protected].
SIMPACK Realtime Car Model VDYM
» REALTIME
Dr. Alex EichbergerINTEC GmbH
VDYM Animation
VDYM Top Level Sturcture
VDYM GUI

Vertical Model of Advanced Air Spring with Stiffness, Coulomb Friction and Internal Dynamics Non-Linear Damping and Series Stiffness
6
SIMPACK»News, December 2004
What’s New in SIMPACK Wheel/Rail 8.7
» WHEEL/RAIL
Dr. Christoph WeidemannINTEC GmbH
As in every major SIMPACK release, the new SIMPACK release - 8.7 - has a lot of new features and improvements for our Wheel/Rail customers. The focus this time was not just on new developments, but on improving and enhancing the existing functionality.
NEW CARTOGRAPHIC TRACKThe new release offers a redesigned Cartographic Track Module, which of-fers more fl exibility and user-friendli-ness. The Track no longer comprises of “ensembles”, but is defi ned from individual true-to-life elements. In the horizontal, the elements used are straight sections and circular arcs, as well as the transition elements clothoid, bloss curves and sine and ‘1-cosine’ transition curves. Correspond-ing elements are also available for the Track superelevation. The vertical elements consist of a constant slope element, as well as parabolic and cir-cular arc transition elements. This new approach allows new Track elements types to be easily implemented.There are no restrictions on which ele-ments can be connected to each other. If the Track derivatives of conjoining elements are not continuous, then the transition will be smoothed. If the derivatives are continuous, then the smoothing is optional. The new GUI allows the Track data to be defi ned effortlessly, and to each Track section a comment can be added. In addition, it is possible to generate a fi le contain-ing the Track information and load this into SIMPACK. The Cartographic Track will soon be able to be parameterised, which will give the user a lot more freedom in varying Track data in the Virtual Test-ing Lab.
NEW ASCII MEASURED TRACKThe form in which data is entered into the Measured Track has been improved and made easier to under-stand. The Track data can now be en-tered in three different ASCII formats which are read-in directly by SIMPACK. The user defi nes the vertical and horizontal curvature and the superel-
evation, like in the old binary format. In addition, there are two new data formats, whereby the data is entered in Cartesian Co-ordinates (x,y,z). In one for mat the user enters the camber mm/m, and in the other, the superel-evation is entered. In addition, the vertical trajectory is now considered for all fi le types.
IMPROVED IRREGULARITIESThe two most commonly used Track irregularities have been improved. Excitation type 08: ‘Nonlin. Stoch. by Polynomial’ can now include up to 2000 individual excitation frequencies, instead of the previous 500. Excitation type 09: ‘Nonlin. Stoch. from File’ now shows the mean value and the stand-ard deviation of the signal for each direction in the SIMPACK Echo Area. Moreover it is now possible to shift or scale the irregularities read from the fi le. Thus also measured irregularities can now be widely used for sensitiv-ity analyses or with different levels in more than one model.
NEW FORCE ELEMENTSIn SIMPACK 8.7 three new force ele-ments are of interest to Wheel/Rail users. The Force Element 79: Shear Spring models the bending and shear effects in helical springs, which are of-ten used as the primary or secondary springs. If the coupling Markers move sideways, there will be a restoring force as well as a torque; both will be applied equally at the ‘From’ and ‘To’ Marker.The Force Element 80: Air Spring Ad vanced models an individual non-linear air-spring containing an addi-tional volume and a spring connected in series. The data can be entered into the element as property param-eters, e.g. bellow volume or effective area, or from measured test data. A complex non-linear modelling of the horizontal behaviour is coupled to the vertical behaviour using a shear spring approach. The user can easily switch the behaviour in the Force Element to linearised.The Force Element 61: Vehicle Anti-
Comparison of Curvature Runs for Different Transition Curve Types
Detail of New User Interface for Cartographic Track

7 » WHEEL/RAIL
Dr. Christoph WeidemannINTEC GmbH
Rollbar is used for the simplifi ed mod-elling of anti-roll-bars; the four respec-tive Markers on the bogie and traverse are entered as well as the torsional stiffness. The element distributes the resulting forces automatically at the four Markers.
IMPROVEMENTS IN NOMINAL FORCE CALCULATIONThe automatic calculation of the nomi-nal forces in railed vehicles can some-times be a taxing problem. User errors will inevitably lead to incorrect or un-usable results; vehicle unsymmetries can also cause problems and leave the user without an equilibrium. To help prevent user errors, the Nominal Force Parameters documentation has been improved, including a specialised sec-tion on railed vehicles. If the vehicle is unsymmetrical (e.g. if a wheelset generates tangential forces due to an initial yaw angle, then the resulting tangential forces cannot be brought into equilibrium by a nominal force), then it is possible to disable the wheel-rail contact by switching the wheelset Joints to rheonomic Joints for the du-ration of the calculation.
IMPROVEMENTS IN WHEEL/RAIL CONTACTA new wheel-rail contact model has been introduced; it is now possible to use an elastic multi-point contact model for constant rail profi les. The principle is similar to the standard multi-point contact, however the nor-mal forces at the contact point are not provided by a Constraint, but from a spring-damper element. As well as be-ing numerically more stable in critical contact situations, this approach al-lows the accurate modelling of wheel lift and rail re-contact. This contact method is therefore particularly suit-able for derailment investigations.In addition the handling of the multi-point contact has been simplifi ed. The boundaries between the tread, fl ange and back fl ange can be set in the vehi-cle globals. The “Check Profi les/Tables” plots show clearly the different con-tact functions.
It is now possible for vehicles to come to a complete standstill and then start moving again. If the option for the calculation of the creep reference velocity in the Vehicle Globals is set to “v mean” and the vehicle is close to stopping, SIMPACK changes the fric-tion from creep theory to Coulombic, allowing a realistic simulation of the standstill even on a slope or in a su-perelevated section of the Track.The Polách creep theory now also al-lows the friction to fall off with higher creep velocities. FASTSIM now offers a fi ner discretisation of the contact area, leading to a more realistic simu-lation for high creep coeffi cients near to the friction value. Additionally an enhanced FASTSIM returns the wear coeffi cients of the individual wheels as output values, making it possible to perform simple wear estimates.
WHAT ARE THE CURRENT AND FU-TURE DEVELOPMENTS?Up until the next major release we will be mainly working on improve-ments to the wheel-rail contact. Based on the tried and tested quasi-elastic contact, we will improve the fl exibility and user-friendliness of the contact model. The model will offer the user a clear overview and will allow further enhancements to be easily added, for example wear calculation or non-el-liptical contact. As always, the new developments in SIMPACK Wheel/Rail are driven by customer wishes and re-quirements and you can look forward to the new functionality that will be available at the next User Meeting.
Improved „Check Profi les/Tables“ Plot
Nominal Forces Can Now Be Calcu-lated Easily also for Unsymmetric Models

8
SIMPACK»News, December 2004
The Powerful Linear Subsystem Solver for Flexible Bodies
» SOLVER
Dr. Stefan DietzINTEC GmbH
The modal approach is a powerful method to represent fl exible bodies in multi-body systems. In many cases only a small number of modal degrees of freedom are required to correctly represent the fl exible body deforma-tion in SIMPACK, meaning the simula-tion tasks can be performed within seconds. However, for a large number of interface loads or moved loads on fl exible bodies the number of modal degrees of freedom can drastically increase. The new solver enables the user to considerably increase the number of modal degrees of freedom without a signifi cant increase in the required computational time. This en-ables improved accuracy and an easier handling of the FEMBS interface.
STATE OF THE ARTThe integration of fl exible bodies in multi-body systems is an advanced technology, but can still be performed without diffi culty. A detailed fi nite element representation of a vehicle component, needs to be reduced to a modal representation to be incor-porated into a multi-body model. Limiting the number of modes ena-bles small and fast simulation models, however this raises the question of whether enough modes are selected for the correct representation of the elastic body.In current multi-body system codes, the equations of motion consist of a combination of the linear modal rep-resentation of fl exible bodies and the non-linear equations that describe the surrounding multi-body system, which includes the non-linear rigid body mo-tion of the fl exible bodies. The system of linear and non-linear equations is then solved using time integration procedures that are designed for non-linear mathematical problems.
WHY MORE POWER?The increasing demands regarding the level of detail in the fl exible body representation in multi-body systems leads to both an increased number of modes and linear equations. The representation of local deforma-
tions near the attachment points of a fl exible body, for example, requires a large number of high-frequency modes that reduce the step sizes dur-ing the time integration and therefore lengthen the computational times. When moving loads on fl exible bod-ies the problem becomes apparent; for each nodal position of the moved load, a frequency response mode has to be calculated in order to represent the local deformation under this load. This, therefore, drastically increases the number of required modes.With this new solver technique the complete system of equations is sub-divided into the linear modal equa-tions representing the fl exible body and the non-linear equations that represent the surrounding multi-body system. A powerful semi-analytic sol ver is applied to the linear modal equations and the non-linear part is still solved by the standard integration procedures for non-linear multi-body systems. These two methods are then coupled together as a co-simulation. An equidistant time grid is used to exchange data between both subsys-tems. Meanwhile, within the macro steps, the linear subsystem and the non-linear equations are solved in-dependently of each other, which is clearly advantageous for the solution of the linear modal equations. Using orthogonal mode shapes means a single modal equation for each mode is achieved, which is then used to represent the fl exible body deforma-tion. The linear problem, with n mode shapes, is therefore solved with n equations, instead of having to solve n x n equations. In addition, each modal equation can be analytically solved, if the generalised modal loads are as-sumed to be polynomial functions and are updated within each new macro step. Finally, the linear subsystem solver evaluates n analytical functions, similar to the so-called Duhamel’s in-tegration. The result is, with the linear subsystem solver, that the calculation time of the fl exible body in the multi-body system depends almost linearly on the number of selected modes.
Fig. 1 A Flexible Car-Body of a Rail-way Vehicle with Attached Devices
Fig. 2 The Lateral Displacement of the Mid-Point of the Car-Body’s Floor Calculated by the Standard MBS Formalism and the New Linear Subsystem Solver
9
The co-simulation scheme of a non-linear multi-body system and a linear fl exible subsystem enables the user to use a large number of modes and set-up very detailed fl exible body representations for multi-body system analyses, whilst keeping the computa-tional time down.
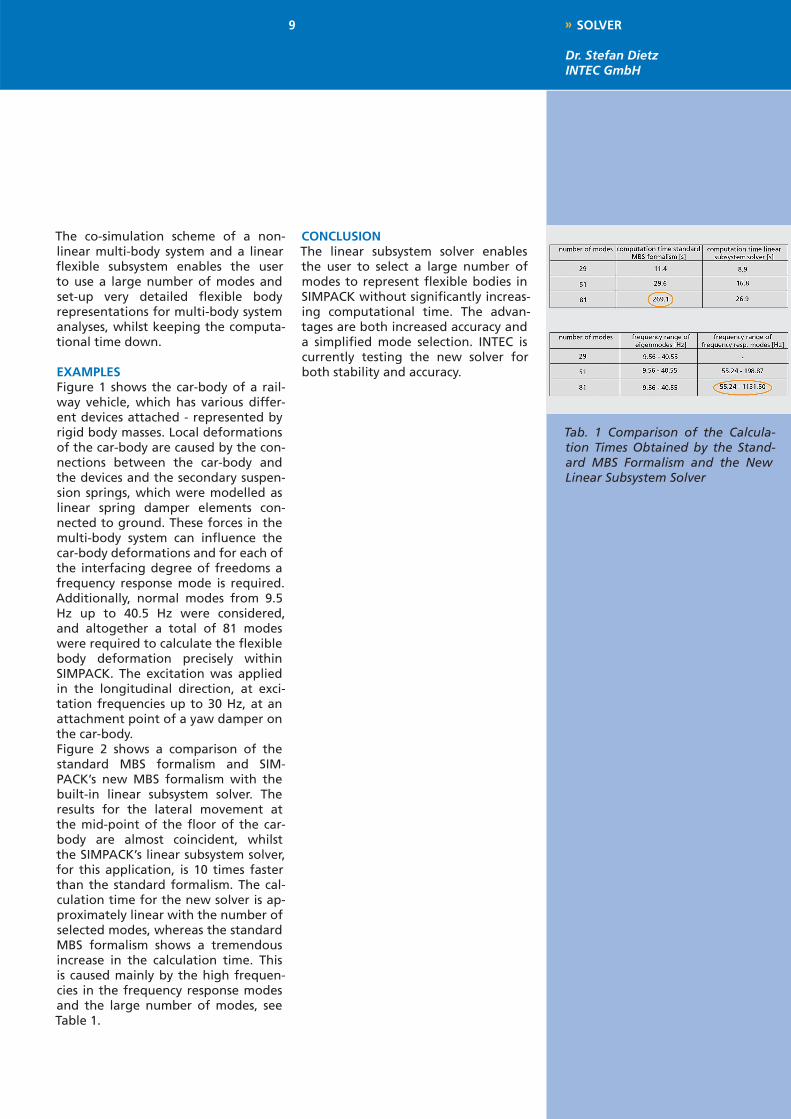
EXAMPLESFigure 1 shows the car-body of a rail-way vehicle, which has various differ-ent devices attached - represented by rigid body masses. Local deformations of the car-body are caused by the con-nections between the car-body and the devices and the secondary suspen-sion springs, which were modelled as linear spring damper elements con-nected to ground. These forces in the multi-body system can infl uence the car-body deformations and for each of the interfacing degree of freedoms a frequency response mode is required. Additionally, normal modes from 9.5 Hz up to 40.5 Hz were considered, and altogether a total of 81 modes were required to calculate the fl exible body deformation precisely within SIMPACK. The excitation was applied in the longitudinal direction, at exci-tation frequencies up to 30 Hz, at an attachment point of a yaw damper on the car-body.Figure 2 shows a comparison of the standard MBS formalism and SIM-PACK’s new MBS formalism with the built-in linear subsystem solver. The results for the lateral movement at the mid-point of the fl oor of the car-body are almost coincident, whilst the SIMPACK’s linear subsystem solver, for this application, is 10 times faster than the standard formalism. The cal-culation time for the new solver is ap-proximately linear with the number of selected modes, whereas the standard MBS formalism shows a tremendous increase in the calculation time. This is caused mainly by the high frequen-cies in the frequency response modes and the large number of modes, see Table 1.
CONCLUSIONThe linear subsystem solver enables the user to select a large number of modes to represent fl exible bodies in SIMPACK without signifi cantly increas-ing computational time. The advan-tages are both increased accuracy and a simplifi ed mode selection. INTEC is currently testing the new solver for both stability and accuracy.
» SOLVER
Dr. Stefan DietzINTEC GmbH
Tab. 1 Comparison of the Calcula-tion Times Obtained by the Stand-ard MBS Formalism and the New Linear Subsystem Solver

10
SIMPACK»News, December 2004
Noise, Vibration, Harshness - NVHWhether for comfort analysis, system layout, durability or even analyses up into the acoustic range, the NVH module within SIMPACK offers users the ability to investigate just about any complex systems almost instan-taneously. The suitability of these methods may be readily checked because SIMPACK allows easy re-sult comparison between non-lin-ear models, using iterative time in-tegrations, and the linearised models which use analytical methods. The NVH module also offers various ad-ditional techniques which aid users in investigating non-linear models in the time domain.
HISTORYMany of the NVH methods within SIMPACK were available in the mid-eighties, even before SIMPACK had been in existence. Several techniques were realised by the DLR (German Aerospace Centre), in SIMPACK’s predecessor software called Medyna. Medyna is primarily a linear software analysis tool used in the wheel-rail in-dustry. In 1993 the decision was taken by the DLR to discontinue develop-ment work on Medyna and focus on the development of SIMPACK, thus passing vast amounts of expertise and know how onto SIMPACK.
LINEAR SYSTEM ANALYSISAny model within SIMPACK may be linearised enabling modal analysis. An investigation of the modal ener-gies and vector diagrams may also be readily carried out. With the NVH module, further investigations in the frequency domain, of the linearised model, may be undertaken.Applying an excitation to a model, in the form of a force, torque or displacement, a user may employ
“Frequency Response” to obtain the transfer function of any output signal in relation to the excitation signal. Phase difference between the signals is also given. “Linear System Response” differs from “Frequency Response” in that the actual value of the output signal, with respect to
frequency, is calculated. Also, several simulataneous input excitations may be applied to the system. The spectral density of a system, primarily used for comfort analysis in the frequency do-main, may be obtained using “Spec-tral Analysis”. “Covariance Analysis” delivers the covariance matrix of a system, which gives an indication of how the input and output signals are coupled.
PARAMETER VARIATION AND COM-PARISONPerhaps one of the greatest advan-tages of NVH is the ability to carry out analyses on a large number of model variations within literally seconds of CPU time. For example, the resultant effects on an entire system caused by varying the length of a pendulum, used as a vibration absorber, may be quickly understood. Not only can a user carry out extremely fast inves-tigations of a linearised system but also compare the difference between the linearised and non-linear model, thus determining the suitability of the applied method.
TIME DOMAINUsing the non-linear model, a fre-quency range may be investigated by applying a “Frequency Sweep” time excitation to the system. Because the excitation signal is continually chang-ing the system is never in a truly set-tled state. Transient effects may be reduced by using a longer simulated time period, with the same frequency range, but this will also increase CPU times. In order to eliminate all transient effects the “Non-linear Fre-quency Pass” (NLFP), has been imple-mented into SIMPACK.
NON-LINEAR FREQUENCY PASSUsing NLFP, a system is excited using sinusoidal or rotational, used for sim-ulating unbalanced masses or roller rigs, input signals. Once the system has settled down into a steady state oscillation, the amplitude and phase of all output signals are recorded and the excitation frequency is then
» SIMPACK NVH
Steven MulskiINTEC GmbH
Parameter Variation Using Linear System Response. Displacement of Blue Mass with Various Pendulum Lengths
Two Mass Oscillator with Actuator and Non-Linear Vibration Absor-ber
Comparison of Methods. Displace-ment of Yellow Mass.

11
advanced to the next frequency step, and the procedure is repeated. Thus an entire range of frequencies may be easily investigated without the unde-sired transient effects.Complete vehicles, employing either test rigs or track/road excitations, may be investigated using a number of NVH techniques. Because a stochastic signal may be easily converted into a track or road excitation, SIMPACK enables straight forward comparison between linearised and non-linear (using time integration and FFT post processing), analyses. A very useful tool for ensuring method suitability.
PRE- & POST-PROCESSINGThe NVH module also offers a pre-processing tool which helps deter-mine the polynomial coeffi cients from measured data for simulating frequency dependent force elements. A new post-processing fi lter enables quick order analysis, often necessary for vibration investigations of engines and drive trains.
The SIMPACK NVH module offers users the power to examine complex sys-tems almost instantaneously. Because a model may be investigated either within the frequency domain or time domain, using the same excitations, a SIMPACK user can always be confi dent in the chosen methods suitability.
» SIMPACK NVH
Steven MulskiINTEC GmbH
Analyses Using Either the Lineari-sed or Non-Linear Model
Complete Vehicle Testing with Roller Rig

12
DR. GERHARD HIPPMANNDr. Gerhard Hippmann is the proud owner of a doctorate hat, that has been tailor-made for him. The hat shows the work that Gerhard undertook for his doctorate and on its top is a cushioned mattress into which is embedded a pup-pet - head fi rst. Gerhard developed a polygon contact model for his disserta-tion, which investigated the complex problem of modelling contact in MBS simulations. The contact model used to calculate the contact forces could also be referred to as a “Mattress Model”, which the hat designer, Andreas Heck-mann, represented perfectly. Not to be forgotten, there is also a mini replica of Gerhard’s electric guitar attached to the hat. The guitar was made by Gerhard himself, which, said by Gerhard him-self, he plays with vigour in the hard rock band Pressuck. A car is the ‘second Body’, which is to be found in his disser-tation. The car, which is also attached to the hat, is defi nitely something which one would not associate with Gerhard. The animations of the car running over the dummy were so spectacular, that the examiners, under the leadership of Professor Lugner, had no other choice but to congratulate him on completing his doctorate.
TWO NEW TIME EXCITATIONSTime Excitation 14: Constant valueThis Excitation allows a constant value to be defi ned for either the position, velocity or acceleration. The respective derivatives and/or integrals are calcu-lated automatically. Time Excitation 15: u, ud or udd by In-put FctThis Time Excitation reads-in an Input Function for the defi nition of either position, velocity or acceleration. The Input Function is read-in with linear in-terpolation in-between the value pairs. The transition between the linear sec-tions are then smoothed using circular arcs. The smoothing arcs are user de-fi ned, with these transitions defi ned by radii or through smoothing parameters. The respective derivatives and/or inte-grals are also automatically calculated. The most important application for
these Time Excitations are when enter-ing velocity profi les with linear velocity increases and constant derivatives, e.g. acceleration of engine velocity and ve-hicle velocity profi les.
SCALED TRANSIENT ANIMATIONSIMPACK 8.7 introduced a new post-processing feature - the scaled transient animation. This feature enables the user to scale the motion of individual bodies, relative to other bodies, during an animation. The motion of bodies can be scaled for each translational and ro-tational component separately.Any marker can be used as the scaling reference co-ordinate system for defi n-ing the scaling directions. Typical applications are for the visualisa-tion of high frequency small amplitude motions and small relative motions be-tween parts with large global displace-ments; this is often the case for oscilla-tions of a car engine relative to the car body whilst the car is driving along the road.
SIMPACK GOES LINUXFrom version 8.7, SIMPACK is now avail-able for Linux systems. The SIMPACK solver, the graphical user interface and the graphical post-processing are avail-able for Red Hat Linux. The currently supported operating system is the Red Hat version 8 in the 32 bit edition, in conjunction with the GNOME desktop environment. For SIMPACK user rou-tines the INTEL FORTRAN Compiler for Linux version 8 is required.
ORDER ANALYSISAn Order Analysis is now available as a new fi lter within the SIMPACK Post-Processing General Plots. This fi lter is used to analyse vibrations in vehicle power trains with the crankshaft or drive shaft rotational velocity and an analysed signal used as the input signal. The output from the fi lter is the order of the response signal for the selected crankshaft or drive shaft. Measured signals can also be analysed and there-fore be used for the validation of MBS models.
LATEST NEWS
» NEWS
Gerhard Hippmann with his docto-rate hat
SIMPACK»News, December 2004
New SIMPACK Feature: Scaled Tran-sient Animtaion
SIMPACK goes LINUX

13 » STAFF
Hello,
My name is Ute Schmalz. I have been part of the SIMPACK team since No-vember 2000 and I am working with Claus Schwientek in system adminis-tration.After obtaining my Physics degree I began working in the computing branch. I have been mainly involved with quality insurance and other pro-gramming tasks.My duties as a system administrator at INTEC include the Unix system and backup tasks and parts of the Window System Administration. Furthermore I support the internal computer net-work. In my free time I am happy being with my family, doing tap dance and read-ing historical novels.
Hello,
My name is Marcus Sindermann. I was born in 1976 in Bremen where I lived the fi rst 20 years of my life. In 1997 I moved to Munich to study computer science at the Technical University. During my studies I began to work at INTEC where I wrote my diploma thesis on the effi cient visualisation of elastic bodies. I fi nally joined the company as a permanent employee in June 2003.My main fi eld of activity at INTEC is in the development of the new SIMPACK GUI and I am currently focussing on the new Plot Module.My hobbies include athletics, where I spend a lot of my free time, as well as ballroom dancing. In addition I often go swimming in the summer and ski-ing in the winter.
Hello everybody,
My name is Nicola Scherrer. I studied computer science at the Technical Uni-versity of Munich, where I graduated in 1995. The following years I‘ve been mainly working as a freelancer. I‘ve spent 17 months in Birmingham, UK, before returning to my hometown of Munich at the end of 1999. My fi ancé Gerhard Hippmann (who‘s working on MBS methods) introduced me to INTEC whereupon I joined the SIMPACK de-velopment team in February 2003 as a permanent employee.As the SIMPACK build manager I‘m responsible for- merging the work of the developers,
running the build scripts on the six supported platforms and implement-ing bugfi xes if necessary
- maintaining the installation tool for the UNIX platforms and Linux
In addition, the evaluation and intro-duction of a Source Control Manage-ment tool kept me busy during the past year.In my spare time my main interests are:- music (concerts, cd collection)- photography- sports (gym, jogging, hiking)- reading novels in English
Ute Schmalz
Marcus Sindermann
Nicola Scherrer

14
INTEC’S STRATEGYThe market for multi-body simulation is highly dynamic, characterised by a tenfold worldwide expansion rate and a constant push towards new ap-plication fi elds, for example, detailed investigations of complex gear trains in wind turbines. Additionally a grow-ing demand for using sophisticated multi-body models in non-multi-body environments by control experts can be seen. Also the overall complexity of multi-body models seems to continu-ally push the boundaries. An example is the simulation of complete engines consisting of valve-, gear-, chain- and crank train including fl exible bodies with a huge number of degrees of freedom. HLA and EHD being also in-cluded. The frequency content of mul-ti-body applications has been moved into the acoustic range, for simulating the acoustics of oil pumps. Last, but not least, the CAD environment at the customers site is undergoing large changes like the switch from CATIA V4 to CATIA V5.INTEC’s response to meet the require-ments of a highly dynamic multi-body market is to perpetually produce new ideas, implement them in software
and offer expanded and new solu-tions to the customer. This was proven at the SIMPACK User Meeting 2004 at Eisenach, where a huge number of new products for automotive, rail-way, engine, plants and machinery tool simulation were introduced to the participants. A new solver option for fl exible bodies, a completely new process effi cient 2D-plot environment, SIMPACK for Linux, a real-time car model, a process from general multi-body models to real-time hardware, and a completely new interface to CATIA V5, are only a few of the more than 100 new features.INTEC’s future strategy is to concen-trate on the multi-body core business, the product line SIMPACK, and to of-fer highly sophisticated interfaces to plug SIMPACK into customer defi ned CAE process landscapes. A continually changing landscape due to the indi-vidual projects. I am happy that all SIMPACK News readers can look back on a successful Year 2004 and I look forward to work-ing together with all our customers and clients in 2005.
NEW UNIVERSITY AND RESEARCH LICENCES SINCE JULY 2004
Beijing University of Chemical Technology, P.R. ChinaNihon University, Tokyo, JapanShonan Koka University, Fujisawa City, JapanTU München, Fakultät für Sportwissenschaft, GermanyUniversity of Cooperative Education, Mosbach, Germany
NEW COMMERCIAL LICENCES SINCE JULY 2004
Ansaldobreda, Pistoia, ItalyBMW M GmbH, München, GermanyBMW Motorrad, München, GermanyBMW Motorsport, München, GermanyMAN Nürnberg, GermanyMesH Engineering Team, Dettenhausen, GermanyNissan Diesel, JapanVoith Turbo Scharfenberg GmbH & Co. KG, Salzgitter, Germany
» MARKET REVIEW
SIMPACK»News, December 2004
Dr. Alex Eichberger, Managing Director, INTEC GmbH

15
SIMPACK TRAINING COURSES
January 2005 17.01. – 18.01.2005 SIMPACK BASIC Training
19.01. - 20.01.2005 SIMPACK Wheel/Rail Training
19.01. 2005 SIMPACK Automotive+ Training
20.01.2005 SIMPACK Code Export Intro Day*
21.01.2005 Simulink Interfaces Training
25.01.2005 Virtual Suspension Intro Day*
February 2005 14.02. – 15.02.2005 SIMPACK BASIC Training
16.02. – 17.02.2005 SIMPACK FEMBS Training
18.02.2005 SIMPACK User Routines Training
March 2005 14.03. – 15.03.2005 SIMPACK BASIC Training
16.03. – 17.03.2005 SIMPACK Wheel/Rail Training
16.03.2005 SIMPACK Automotive+ Training
18.03. 2005 SIMPACK Contact Mech. Training
April 2005 11.04. – 12.04.2005 SIMPACK BASIC Training
13.04.2005 SIMPACK NVH Training
14.04. – 15.04.2005 SIMPACK FEMBS Training
* The introduction days are free of charge.
SIMPACK ACADEMY
27.01. - 28.01.2005 SIMPACK Academy: FEM-MBS-Interfacing
13.09. - 16..09.2005 SIMPACK Academy: MBS Numerics
SIMPACK AT CONFERENCES AND EXHIBITIONS
22.02. - 23.02.2005 6th Stuttgart International Symposium, Stuttgart
23.02. - 25.02.2005 7. Internationale Schienenfahrzeugtagung, Dresden
04.04. - 05.04.2005 fahrwerk.tech, Garching near Munich
31.05. - 02.06.2005 Engine Expo 2005, Stuttgart
We would be glad to welcome you to our SIMPACK training courses or to a SIMPACK Academy course.To register for one of this courses or to discuss your training require-ments please contact
Erni Engert by e-mail:[email protected] by telephone:0049 8153 9288-40or by fax:0049 8153 9288-11
Ms Engert looks forward to hearing from you.
» TRAININGS AND CONFERENCES

» CHINA
ESPIntelli-Center B Room 1709Zhongguancun East Road No.18Haidian District, Beijing 100080P.R. ChinaTel.: +86 - 10 - 826 015 56www.bj-esp.com
PLEASE SIGN ME UP FOR THE FREE DELIVERY OF THE SIMPACK»NEWS(copy, fi ll in, fax to +49-8153-9288-11)
I WOULD BE INTERESTED IN THE FOLLOWING APPLICATIONS
Automotive
Engine
Wheel/Rail
Aerospace
General Machinery
other
SIMPACK»NEWS
1996 – 2004Circulation: 3300SIMPACK Version 5, 6, 7, 8, 8.5, 8.6, 8.7FEMBS, Loads, ProSIM, CatSIM, IdeSIM, MATSIM, SIMAT(INTEC GmbH)
Registered Trademarks
ABAQUS:Abaqus, Inc
ANSYS:Swanson Analysis Systems, Inc.
CATIA:Dassault Systemès
MATLAB:The MathWorks, Inc.
MSC.MARC:MSC.Software Corporation
MSC.NASTRAN:MSC.Software Corporation
Pro/ENGINEER:Parametric Technology Corporation
» UNITED STATES
Altair Engeneering1820 E Big BeaverTroy, MI 48083-2031Tel.: +1 - 248 614 - 2400Fax: +1 - 248 614 - 2411www.altair.com
» KOREA
ADVANCED TECHNOLOGY ENGI-NEERING SERVICE LTD (ATES)8F Fine Bldg., 673-5 Deungchon-Dong, Kangseo-Gu, Seoul, KOREATel.: +82 - 2 - 2657 - 3544www.ates.co.kr
» GREAT BRITAIN
INTEC Dynamics Ltd.Cambridge Road Industrial EstateWhetstone, Leicester LE8 6LH, UKTel.: +44 116 275 1313Fax: +44 116 275 [email protected]
» JAPAN
Altair Engineering, LtdTact No. 4, Bldg. 9F2 - 32 - 12 Minami IkebukuroToshima-Ku, Tokyo 171 - 0022, JapanTel.: +81 - 3 - 5396 - 1341Fax: +81 - 3 - 5396 - 1851www.altairjp.co.jp
» WORLDWIDE
INTEC GmbH (Headquarter)Argelsrieder Feld 1382234 WesslingTel.: +49 - 8153 - 9288 - 0Fax: +49 - 8153 - 9288 - 11 www.simpack.com
CONTACT
Name
First Name
Firm
Street
Post Code
Location
Country
Telephone
Fax