Installation Loading and Stress Analysis Involved With Pipelines Installed by Horizontal Directional...
24
-
Upload
gasser-gouda -
Category
Documents
-
view
23 -
download
3
description
Robots are typically used to manipulate objects in space, and thus a robotic task requires the specification of the mutual position and orientation between the robot’s end effector and an object. Once a base frame is established, a suitable frame attached to the end effector is considered whose position is uniquely described by the Cartesian coordinates of the origin, while its orientation can be represented in various ways. A complete representation of orientation is given by the rotation matrix. Its columns are the unit vectors of the end-effector frame expressed in the base frame, yielding 9 parameters subject to 6 orthonormality constraints.
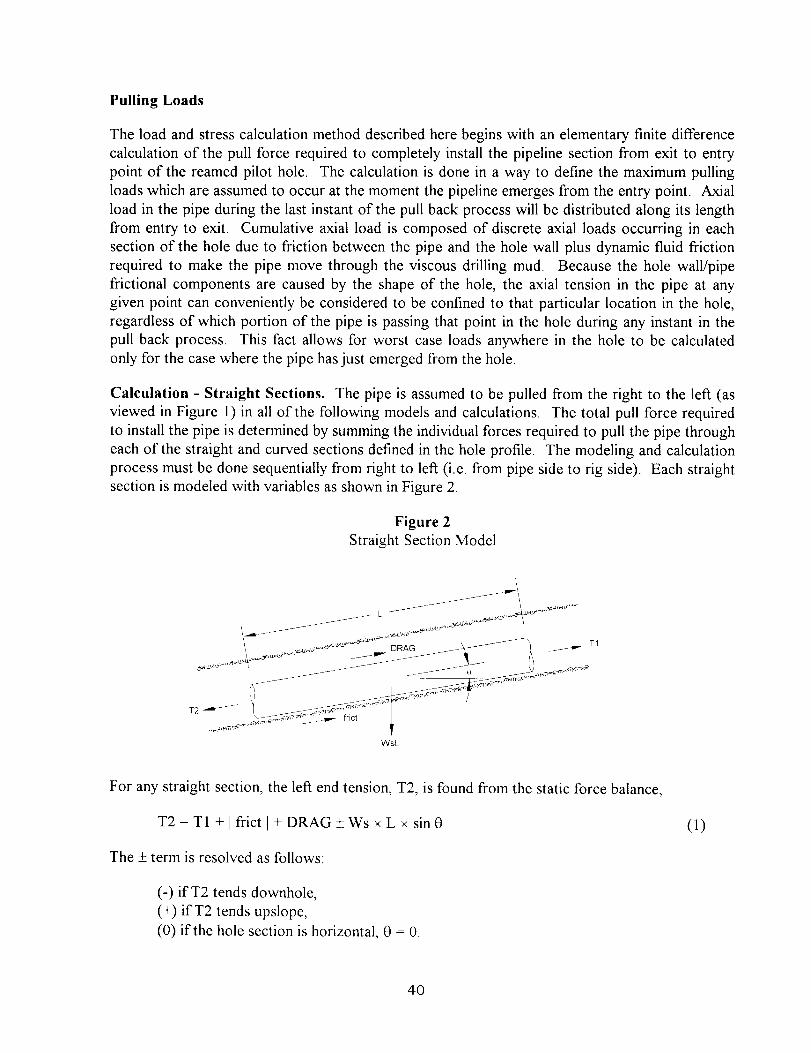
Transcript of Installation Loading and Stress Analysis Involved With Pipelines Installed by Horizontal Directional...