Information Theory for Mobile Ad-Hoc Networks (ITMANET): The FLoWS Project
11
Information Theory for Mobile Ad-Hoc Networks (ITMANET): The FLoWS Project Collision Helps! Algebraic Collision Recovery for Wireless Erasure Networks Ali ParandehGheibi Joint work with Jay Kumar Sundararajan, Muriel Medard
-
Upload
hoyt-ramirez -
Category
Documents
-
view
18 -
download
0
description
Information Theory for Mobile Ad-Hoc Networks (ITMANET): The FLoWS Project. Collision Helps! Algebraic Collision Recovery for Wireless Erasure Networks Ali ParandehGheibi Joint work with Jay Kumar Sundararajan, Muriel Medard. - PowerPoint PPT Presentation
Transcript of Information Theory for Mobile Ad-Hoc Networks (ITMANET): The FLoWS Project

Information Theory for Mobile Ad-Hoc Networks (ITMANET): The FLoWS Project
Collision Helps!
Algebraic Collision Recovery for Wireless Erasure Networks
Ali ParandehGheibiJoint work with
Jay Kumar Sundararajan, Muriel Medard

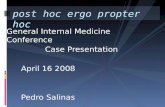
• New approach for contention management in wireless networks
• Throughput and completion delay improvement without coordination among senders
Collision Helps! Algebraic Collision Recovery for Wireless Erasure Networks Medard
• Collision Recovery e.g. ZigZag decoding
• Algebraic representation of the collisions
• Combine finite-field network coding with analog network coding (in the form of collisions)
Collision recovery improves the performance of a MAC with no coordination among senders
MAIN ACHIEVEMENT:
1. Delivery time:• Slotted Aloha: nlog(n)
• Centralized Scheduling: n/(1-p)
• Collision Recovery: n+O(1)
2. Stability Region: Achieve the cut-set bound
HOW IT WORKS: • Exploit the diversity gain of the links to different
senders by allowing more simultaneous transmissions
• Priority-based acknowledgement mechanism
• Each sender broadcasts a random linear combination of the packets in its queue
• ACK seen packets instead of decoded packets
ASSUMPTIONS AND LIMITATIONS:
• High SNR regime
• Perfect feedback channel available for ACKs
Interference management in wireless networks:
• Simultaneous transmissions are are considered lost (collision) in most MAC protocols
• Collisions are normally avoided using centralized scheduling or Aloha-type mechanisms
• Per packet delay: Understand the decoding process at the receivers
• Half-duplex constraint: Requires scheduling between transmit and receive state
IMPA
CT
NEX
T-P
HA
SE G
OA
LS
ACHIEVEMENT DESCRIPTION
STA
TU
S Q
UO
NEW
IN
SIG
HTS
Alice BobAP
X
Tx 1
Tx n
Rx 1
Rx 2

Motivation3
• Approaches to Medium Access Control:
– Centralized scheduling
– Random access
– Back-off mechanism
– Distributed collision avoidance e.g. CSMA/CA
• Collided packets may still be decodable!
Alice BobAPXCollision BAD!!!
REALLY?

ZigZag Decoding4
• Chunk 1 from user A from 1st copy of collided packet can be decoded successfully– Subtract from 2nd copy to decoded the Chunk 1 of user B
• Subtract from 1st copy of collided packet to decode Chunk 2 from user A
– Subtract from 2nd copy of collided packet to decode Chunk 2 from user B
[1] Shyamnath Gollakota and Dina Katabi, "ZigZag Decoding: Combating Hidden Terminals in Wireless Networks," ACM SIGCOMM, 2008. Best Paper Award

Algebraic Abstraction5
• Every collision is a “new” linear equation involving collided packets as unknowns
• Assumption: If packets involved in a reception have not all been decoded, then the reception is considered to be innovative
• Decoding n packets requires n receptions involving only those packets
• Generalization: Network Coding with Collision Recovery
– Send linear combination of the packets at the transmitter
– Treat each reception as a new linear equation of the original packets
xy
z
Tx 1
RxTx 2

System Model – Problem Formulation6
• Time is slotted
• Packet erasures i.i.d. across links and over time
• Perfect feedback channel is available for acknowledgements (ACKs)
• Each sender’s packets to be delivered reliably to all of its neighbor receivers
Tx 1
Rx 2Tx 2
Rx 3
Rx 1
Performance measures:
1. Delay:
– Each sender has one packet
– Goal: Characterize the expectation of the Delivery time, TD
2. Throughput:
– Packets arrive at each sender according to independent arrival processes, e.g. Bernoulli process
– Goal: Characterize the queue stability region

• Centralized Scheduling:Sequentially assign the channel to senders
• Random Access: Each sender transmits with probability q
• Collision Recovery:Every sender keeps transmitting until ACKed
• Collision Recovery with Random Access:Collisions of up to C packets are recoverable
where
Delivery Time – Single Receiver7
Tx 1
Tx i
Tx n
Rx

Stability Region – Single Receiver8
Rx
A
• Centralized Scheduling:
– Scheduler allocates the channel to the sender with the longest queue
– May schedule a queue when its channel is in erasure
– Without prior channel knowledge, cannot beat the simplex
• Collision Recovery:
– Observation: Upon a successful reception, can acknowledge any of the connected senders
– Key idea: By choosing whom to acknowledge, we can preferentially “serve” any of the connected queues
– Priority-based policy achieves any corner point of the region

Delivery Time – Multiple Receiver Case9
Tx 1
Rx 2Tx 2
Rx 3
Rx 1
Delivery time of receiver j =
Neighbor set of receiver j =
• Centralized Scheduling:– It is not always feasible to activate one sender for each receiver in everytime slot
• Collision Recovery:
– Each sender keeps sending its packet until acknowledge by all of the neighbor senders
– Each receiver acknowledges any of the packets involved in each reception (collision) that have not been already acknowledged

Stability Region – Multiple Receiver Case10
• Code-ACK policy:
- Transmission mechanism: Each sender transmits a random linear combination of its queue content at every time slot
- Acknowledgement mechanism: Each receiver j acknowledges the last seen packet of one of the senders in given by the priority-based policy
• Cut-set bound: For each receiver j
Theorem: Code-ACK policy stabilizes the queues for any set of arrival rates satisfying the cut-set bound.
Proof sketch: - Virtual queue Qij for each sender-receiver
pair, (i,j), containing the packets at sender i not yet ACKed by receiver j
- Stability of each virtual queue by stability of priority-based policy
- Stability of physical queues by:

Conclusions11
• Collision Recovery: a new approach to contention management
• Algebraic abstraction to treat collisions as linear equations of packets
• Generalized collision recovery for coded packets
• Collision recovery achieves smaller delivery time compared to centralized scheduling
• Collision recovery at the receivers combined with random linear network coding at the transmitters achieves larger stability region compared to centralized scheduling
• Priority-based acknowledgement policy stabilizes the entire rate region given by the cut-set bound without queue-length information
• Collision recovery approach eliminates the need for coordination among contending sender and leads to fully distributed algorithms implemented over a wireless network