
Inferring Generalized Pick-and-Place Tasks from Pointing...
18
Inferring Generalized Pick-and-Place Tasks from Pointing Gestures Nico Blodow, Zoltan-Csaba Marton, Dejan Pangercic , Thomas Rühr, Moritz Tenorth, Michael Beetz Intelligent Autonomous Systems Group Technische Universität München Semantic Perception, Mapping and Exploration Workshop ICRA 2011, Shanghai, May 2011
Transcript of Inferring Generalized Pick-and-Place Tasks from Pointing...
Inferring Generalized Pick-and-Place Tasksfrom Pointing GesturesNico Blodow, Zoltan-Csaba Marton, Dejan Pangercic, Thomas Rühr, MoritzTenorth, Michael BeetzIntelligent Autonomous Systems Group
Technische Universität München
Semantic Perception, Mapping and Exploration WorkshopICRA 2011, Shanghai, May 2011
Introduction Semantic Mapping Gestures and Objects Semantics Conclusions
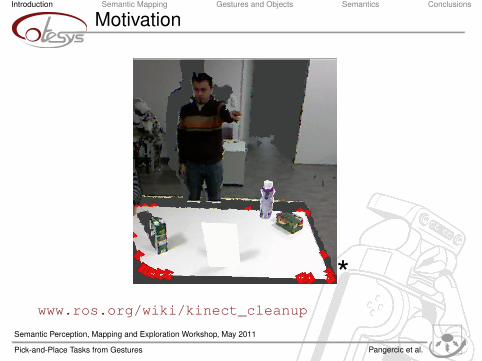
Motivation
*www.ros.org/wiki/kinect_cleanup
Semantic Perception, Mapping and Exploration Workshop, May 2011
Pick-and-Place Tasks from Gestures Pangercic et al.

Introduction Semantic Mapping Gestures and Objects Semantics Conclusions
Introduction
System:I the use of human tracking to guide segmentation of objects
in RGB-D images;I virtually hiding the original object location and possibility of
moving objects around freely for easing the user’s task;I semantic reasoning based on the object’s type and its
required position in the environment for task execution.
Semantic Perception, Mapping and Exploration Workshop, May 2011
Pick-and-Place Tasks from Gestures Pangercic et al.
Introduction Semantic Mapping Gestures and Objects Semantics Conclusions
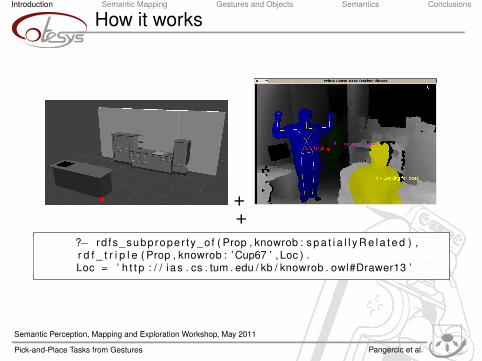
How it works
++
?− rd fs_subproper ty_o f ( Prop , knowrob : s p a t i a l l y R e l a t e d ) ,r d f _ t r i p l e ( Prop , knowrob : ’Cup67 ’ , Loc ) .Loc = ’ h t t p : / / i as . cs . tum . edu / kb / knowrob . owl#Drawer13 ’
Semantic Perception, Mapping and Exploration Workshop, May 2011
Pick-and-Place Tasks from Gestures Pangercic et al.

Introduction Semantic Mapping Gestures and Objects Semantics Conclusions
Autonomous Semantic Mapping based on 3D and RGB
SEMANTIC MAP GENERATION
DATA ACQUISITION
EXPLORATION OF UNKOWN ENVIRONMENT
Point cloud Data
Camera Images
Merging Point Clouds
2D-3D Registration
Pose ValidationDetermining Unmapped
Regions
ComputingCandidate
Robot Poses
POINT CLOUD DATA INTERPRETATION
Generation of Door and Drawer
Hypotheses
Validationof
Hypotheses
Recognition of Planes
and Fixtures
Semantic Perception, Mapping and Exploration Workshop, May 2011
Pick-and-Place Tasks from Gestures Pangercic et al.
Introduction Semantic Mapping Gestures and Objects Semantics Conclusions
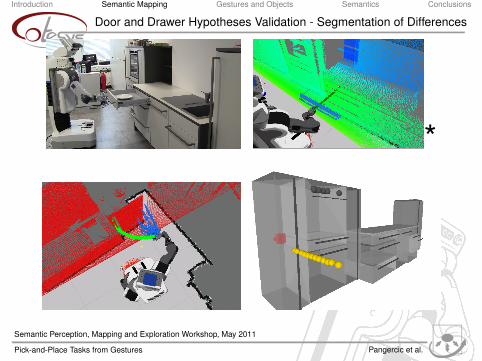
Door and Drawer Hypotheses Validation - Segmentation of Differences
*
Semantic Perception, Mapping and Exploration Workshop, May 2011
Pick-and-Place Tasks from Gestures Pangercic et al.

Introduction Semantic Mapping Gestures and Objects Semantics Conclusions
Final (Manually Augmented) Map
CODE (Coming in May 2011):http://www.ros.org/wiki/autonomous_exploration
Full Video:http://www.youtube.com/watch?v=T15ycSmNOFY
Semantic Perception, Mapping and Exploration Workshop, May 2011
Pick-and-Place Tasks from Gestures Pangercic et al.
Introduction Semantic Mapping Gestures and Objects Semantics Conclusions
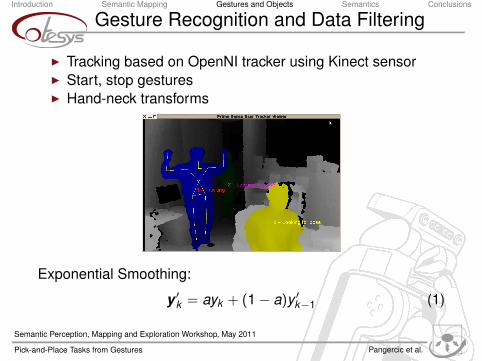
Gesture Recognition and Data Filtering
I Tracking based on OpenNI tracker using Kinect sensorI Start, stop gesturesI Hand-neck transforms
Exponential Smoothing:
y ′k = ayk + (1− a)y ′k−1 (1)
Semantic Perception, Mapping and Exploration Workshop, May 2011
Pick-and-Place Tasks from Gestures Pangercic et al.

Introduction Semantic Mapping Gestures and Objects Semantics Conclusions
Specifying the Object and Target Position
Object Grabbing:RANSAC-basedplane and clusterextraction, line ofpointing and clusterintersection, objectto right wristtransform
Object MovingPoints withinpolygonal prismprojected on theplane and coloredwith plane color
Object ReleasingStop gesture, newsensor origin toobject transform
Semantic Perception, Mapping and Exploration Workshop, May 2011
Pick-and-Place Tasks from Gestures Pangercic et al.
Introduction Semantic Mapping Gestures and Objects Semantics Conclusions
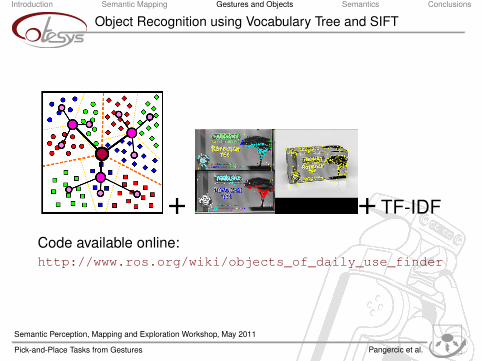
Object Recognition using Vocabulary Tree and SIFT
+ + TF-IDF
Code available online:http://www.ros.org/wiki/objects_of_daily_use_finder
Semantic Perception, Mapping and Exploration Workshop, May 2011
Pick-and-Place Tasks from Gestures Pangercic et al.

Introduction Semantic Mapping Gestures and Objects Semantics Conclusions
Semantic Map Representation
I KnowRob system (www.ros.org/wiki/knowrob)I OWL + SWI PrologI Classes and Typed object instancesI Inspired by OpenCycI Concept of Computables (kind of procedural attachment to
the semantic relations that describe how these relationscan be computed)
I Common sense knowledge imported from OMICS (e.g.fridge is a storage for perishable foods),www.germandeli.com
Semantic Perception, Mapping and Exploration Workshop, May 2011
Pick-and-Place Tasks from Gestures Pangercic et al.

Introduction Semantic Mapping Gestures and Objects Semantics Conclusions
Inferring where to search for milk
storagePlaceFor
instanceOf
instanceOf
Semantic Perception, Mapping and Exploration Workshop, May 2011
Pick-and-Place Tasks from Gestures Pangercic et al.
Introduction Semantic Mapping Gestures and Objects Semantics Conclusions
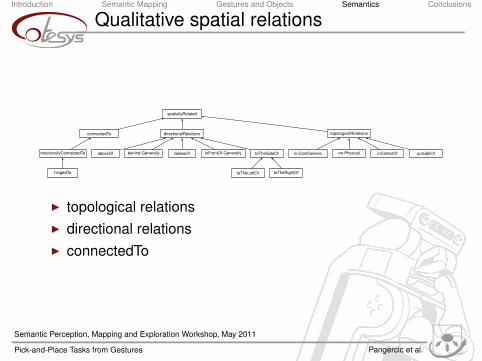
Qualitative spatial relations
outsideOfaboveOf behind-Generally
spatiallyRelated
hingedTo
inCenterOf
connectedTo
toTheLeftOf
on-Physical
toTheRightOf
inFrontOf-GenerallyrotationallyConnectedTo
directionalRelations topologicalRelations
toTheSideOf in-ContGenericbelowOf
I topological relationsI directional relationsI connectedTo
Semantic Perception, Mapping and Exploration Workshop, May 2011
Pick-and-Place Tasks from Gestures Pangercic et al.

Introduction Semantic Mapping Gestures and Objects Semantics Conclusions
Semantics Interpretation
Where is an object of type Cup??− rd fs_subproper ty_o f ( Prop , knowrob : s p a t i a l l y R e l a t e d ) ,r d f _ t r i p l e ( Prop , knowrob : ’Cup67 ’ , Loc ) .
Loc = ’ h t t p : / / i as . cs . tum . edu / kb / knowrob . owl#Drawer13 ’
Semantic Perception, Mapping and Exploration Workshop, May 2011
Pick-and-Place Tasks from Gestures Pangercic et al.

Introduction Semantic Mapping Gestures and Objects Semantics Conclusions
Verifying object placement
Is an object of type Cup placed correctly??− r d f _ t r i p l e ( knowrob : ’ in−ContGeneric ’ , knowrob : ’Cup67 ’ , Loc ) ,storagePlaceFor ( Loc , knowrob : ’Cup67 ’ ) .
Semantic Perception, Mapping and Exploration Workshop, May 2011
Pick-and-Place Tasks from Gestures Pangercic et al.

Introduction Semantic Mapping Gestures and Objects Semantics Conclusions
Additonally required actions
Do we need to open a container??− r d f _ t r i p l e ( knowrob : ’ in−ContGeneric ’ , knowrob : ’Cup67 ’ , B) ,
rdf_has (B, knowrob : openingTra jec tory , T ra j ) ,f i n d a l l (P , rdf_has ( Tra j , knowrob : po in tOnTra jec tory , P) ,
Po in ts ) .
Semantic Perception, Mapping and Exploration Workshop, May 2011
Pick-and-Place Tasks from Gestures Pangercic et al.
Introduction Semantic Mapping Gestures and Objects Semantics Conclusions
Conclusions
I System that effectively combines 3D enviroment modelling,fully body motion analysis and knowledge representationand reasoning.
I Household assistant for the elderly/sick.I Control of robot by pointing gesturesI Inferring missing steps from the instructionI Future work: task plannar and full room tracking
Semantic Perception, Mapping and Exploration Workshop, May 2011
Pick-and-Place Tasks from Gestures Pangercic et al.
Introduction Semantic Mapping Gestures and Objects Semantics Conclusions
Q&A
Thanks!
Closing the loop:
*Intelligent Autonomus Systems Group:http://ias.cs.tum.eduTUM ROS Packages:http://www.ros.org/wiki/tum-ros-pkgContact:{blodow, marton, pangercic, ruehr, tenorth,beetz}@cs.tum.edu
Semantic Perception, Mapping and Exploration Workshop, May 2011
Pick-and-Place Tasks from Gestures Pangercic et al.

















