Inertial Labs Introduces the Complete Remote Sensing ... › wp-content › uploads › 2020 ›...
10
Inertial Labs Introduces the Complete Remote Sensing Payload Solution
Transcript of Inertial Labs Introduces the Complete Remote Sensing ... › wp-content › uploads › 2020 ›...
-
Inertial Labs Introduces the Complete
Remote Sensing Payload Solution
-
Introduction to Remote
Sensing and Scanning
Light detection and ranging (LiDAR) sensors are acommonly used source of optical information forremote sensing payloads in scanning and surveyingapplications. LiDAR payloads use penetratingpulses of laser light that are reflected and used todetermine relative distance to the point that itreflected from. When these pulses backscatter(reflect at an angle of 180 degrees), many payloadswill use inertial navigation systems (INS) totimestamp and georeference data points that areacquired. Compiled together, these individual datapoints paired with point cloud software streamlinethe process for analyzing structures and groundplanes.
Regular inspections of power lines are critical forsecuring uninterrupted power distribution. In thepast, ground inspection methods performed by agroup of surveyors were utilized. This method isvery labor-intensive, time-consuming, andpotentially dangerous for teams inspecting lineslocated in hazardous terrain. As of late, energyservice providers have begun to turn to automatedLiDAR-equipped UAV payload technology. This hasproven to be an effective alternative to manualinspection and results in the production of highlyaccurate point cloud data through post-processedkinematic (PPK) and real-time kinematic (RTK)methods. With the use of Inertial Labs' solutions,surveying power lines with an automated payloadis both a time-efficient and cost-effectivealternative to land surveillance.
LiDAR systems have a wide range of applicationsthroughout all phases of construction. Even beforeconstruction, it is important to survey the site toconfirm that all structures can foundationally existon the terrain without any structural issues causedby rockslides, uneven terrain or sink-holes. Anefficient way to survey structures and terrainaccurately is by using drone aerial surveillance.LiDAR payloads can also be a useful tool in thevisualization of elevation, as color schemes can beadded to the point clouds indicating changes inelevation. As a result, the time it takes to create x,y, and z coordinates for structures has been greatlyreduced, meaning that 3D analysis of the groundand structures is much easier.
Industry Analysis
InspectionsPower Lines
Construction Site
Autonomy and SLAMThe most valuable resource and commodity in thisworld is time. As our society enters a new age ofautonomy the desire for fully functioning level 5autonomous vehicles and machinery is beginningto emerge. This comes with a caveat, robots andother autonomous systems are not always able torely on GNSS for navigation purposes, especiallyindoors where GNSS signals are not always reliable.Whether indoors or outdoors, GNSS-basednavigation is not sufficiently accurate for systemsthat need precision within a few centimeters tooperate safely. Systems requiring centimeter levelprecision rely on simultaneous localization andmapping (SLAM) to map and discover theirsurroundings.
-
Systems utilizing SLAM build their own maps in realtime. These systems can find their own position byaligning sensor data that they collect withpreviously collected data to build out a map fornavigation. Robots using SLAM continuously gatherdata at a rapid rate. While camera files areprocessed at a considerably faster rate whencompared to LiDAR files, they lack nativeinformation regarding depth and reference frames.
Raw sensor data undergoes a process called sensorfusion employed by a Kalman filter (for more infoon sensor fusion see our white paper) which givesa better estimate of how the autonomous platformis moving. Inertial Labs considers NVIDIA's graphicscards as the natural next-step integration forfuture navigation solutions. With an embeddedsensor fused navigation solution and acomplementary computer vision algorithm for taskrecognition and execution, Inertial Labs expects topartner with many developing companies pushingthe ball forward in the realm of autonomy.
Heading and position accuracy are the mostimportant aspects when performing any remotesensing task as these play vital roles in point cloudprecision and accuracy. Typically correctionalinformation is sent in the form of a RTCM protocol,which is valid up to approximately 35 kilometersfrom the base station.
Cloud Modeling
Many topographic surveying industries or SLAMsolutions do not require centimeter levelaccuracies in their point cloud solutions. As aresult, a Real Time Kinematic solution is accurateenough without any correctional services beingused. RTK data is produced immediately, withoutthe need for time-consuming and complicatedpost-processing.
As a result, the user can generate models in realtime if they have hardware with a GPU capable ofdoing so.
Acquiring Data
RTK Solutions without Corrections
Correctional services can considerably increaseposition and heading accuracies of navigationsystems. Presently, there are many servicesavailable including: NovAtel's TerraStar, OmniStar,Oceanix, SmartNet, and Sapcorda. All of which aresupported by Inertial Labs’ differing productfamilies. Although not all support centimeter levelRTK corrections, all result in removing heading andpositional errors between a base station (ornetwork) and a rover.
RTK Solutions with Corrections
Correction data can be received from either anetwork of base stations or from the user's owndedicated local base station. The advent of RTKreceivers has made it increasingly easy for users toachieve centimeter level location data. This is veryimportant for applications that require precise andaccurate data and cannot post-process data – likethat of power line inspections or roadway analysisfor sinkholes and asphalt cracking.
At Inertial Labs, our solution has been proven togenerate repeated RTK point cloud models with 5centimeters of accuracy (cloud thickness). As aresult, our team can confidently market a solutionthat is not only robust and reliable, but a systemthat will produce accurate data in real time, whichcan eliminate the need for post processing.
-
Post-Processed Kinematic (PPK) is the alternativeto RTK in which sub-centimeter position accuracydoes not happen in real time but is achievedthrough correctional services that are applied afterthe data is captured.
Post-Processed Solutions
Correction data can be received from either anetwork of base stations or from the user's owndedicated local base station. The advent of RTKreceivers has made it increasingly easy for users toachieve centimeter level location data. This is veryimportant for applications that require precise andaccurate data and cannot post-process data – likethat of power line inspections or roadway analysisfor sinkholes and asphalt cracking.
Besides enhancing position accuracy, post-processing inertial data also significantly increasesthe heading accuracy of a data set, which isarguably the most important component whengenerating a final solution. The added benefit ofutilizing PPK is that the rover does not requireadditional hardware on-board to get sub-centimeter position accuracy or a heading accuracyof 0.03 degrees. When analyzing data, commonPPK software can be used to view and analyze datawith respect to time in the forward and backwarddirections.
This means that dual antenna systems are notneeded, and a surveyor can rely on a singleantenna system without the worry of setting up aproper dual antenna baseline for the increasedheading accuracy. Many PPK software programsrequire base station data (virtual or physical),inertial data from rover, and GNSS data (withoptional RTCM corrections) in order to computethe most accurate PPK inertial solution.
When post-processing, both the base station (orground station) and the UAV record GNSS data,which is then combined with inertial data andprocessed to create accurate positioning andorientation data. Like RTK corrections (as RTCMmessages), PPK corrections work best when therover is closest to the base station. However, whenoperating at long distances from the base station,atmospheric errors can occur. Fortunately, manyPPK software programs today have built infunctions to help mitigate this error build up.
-
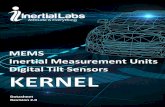
Beginning with the blue part of this trajectory, therover begins with a straight flight reaching a setvelocity to allow for GNSS heading corrections tobegin being filtered into the INS solution. After thisstraight flight, convergence maneuvers (as figureeights) are done to allow GNSS heading to be fusedproperly with inertial data from the IMU which isused in PPK software. Latter parts of the blue andgreen portions of the trajectory file are wherescanning data is logged and used for cloudgeneration.
Additional software is then needed for takingcomputed trajectory files (computed in real-timefrom Inertial Labs devices or generated in PPKsoftware) and combining them with the acquiredlaser data. Inertial Labs supports laser data frommany scanners including: Velodyne, Quanergy,Ouster, and Livox. An example of what a flight'strajectory would look like in a post processingsoftware is shown below.
Laser File Generation
can configure parameters generating point cloudfiles. They can select additional portions of thetrajectory that they would like to associate withthe generated cloud. With this possibility in mind,the user can ensure that the clouds they producecontain data that is reliable.
Once the trajectoryand scan files havebeen loaded onto thecloud generationsoftware, the user
Once a .las point cloud has been generated, thereare a variety of cloud viewing software programsthat are available to further analyze the pointcloud and generate conclusive results. For thosethat want to analyze differences and similaritiesbetween multiple acquired clouds, free-ware suchas CloudCompare offer tools for users to customizeprofiles and analyze datasets. This will allow usersto analyze the thickness of the cloud at both ageneral level through inspection, or at a detailedlevel. Users can take a cutout of a specific sectionof a point cloud and rotate the point of view toanalyze its thickness. The thickness of a cloud isimportant, as it is reflective of the accuracy of thepoint cloud. Alternatively, if the user simply wantsto be able to view data with minimal amounts ofmanipulation and analysis, free-ware like Displazhas proven to be a very effective tool.
Analysis
-
Different scanning projects will have differentrequirements, and many LiDAR scanners will not beable to meet the requirements for all applications.The INS-D-OEM is easily integrated with a varietyof the top LiDAR scanners in the industry includingthe Livox Mid-40, Livox Horizon, Velodyne VLP-16,Quanergy M8, and OUSTER OS1.
With the ability to be easily integrated with allthese LiDAR scanners, RESEPI can be used in a widerange of applications with varying requirements. Inaddition to the many LiDAR integrations, theRESEPI has also been designed to work with stereocameras like the Sony A6000 for photogrammetry,and the Blackfly FLIR.
What sets RESEPI apart fromother remote sensing payloads isits ability to be customized.
The Remote Sensing Payload
Instrument (RESEPI)
Features
The Inertial Labs RESEPIfeatures a comprehensiveinterface both in and outof flight. One of the manyfeatures of the interfaceis that it displays
Diverse Scanner and Camera Integrations
Real Time Logging
Each LiDAR scanner may vary in a variety of keyspecifications such as maximum AGL, rangeaccuracy, scan rate, and field of view.
what devices are connected, as well as informationfrom the data logger. The data logger will loginertial data, LiDAR data points, base station data,and raw GNSS data. Also, if the RESEPI is integratedwith a camera in addition to LiDAR, the interfacewill show the amount of images captured from thecamera device. Each category of data from thedata logger makes up the components necessaryfor generating a point cloud. If using a real timesolution, then data logging features the ability tohave a scan file generated at the time of scancompletion.
Future Development
Current partnerships are directing the RESEPIsolution into the world of autonomy. In futurereleases the RESEPI could be paired with NVIDIAgraphics cards to allow for real time dataprocessing and object recognition, avoidance andeven SLAM based navigation for the autonomousworld. Additionally, RESEPI can be sensor fusedwith many types of optical data which is currentlylimited to stereo cameras. However, with the rightpartners, RESEPI can be further developed to workwith multiple LiDAR scanners, thermal cameras,stereo cameras, infrared cameras and othersources of optical data.
-
Benefits for Inertial Labs Partners
Inertial Labs RESEPI is the perfect solution for newcompanies looking to get into the remote scanningindustry or for existing companies looking toexpand their business. Inertial Labs providescustom solutions for entities looking to get into anysubcategory of the UAV LiDAR industry. Frompower line inspection to construction sitemonitoring to precision agriculture, Inertial Labs isconfident that this platform can be integrated tomeet each sect of the industry.
Inertial Labs has 20 years of experience in thepositioning and orientation industry, as a resultInertial Labs has had years to fine tune andoptimize supply chain management. With well-defined roles and an open and collaborativeatmosphere, Inertial Labs has fostered a workingenvironment centered upon an efficient flow ofinformation and products. Inertial Labs partners donot need to worry about the logistics of orderfulfillment and supply chain and can focus onbusiness development.
Here is a cost and functional comparison of the RESEPI and similar products fromcompetitors. We understand that for every application there is a certain set of requirements. Inertial Labs isworking hard to build a perfect solution for every application while also ensuring the customer does notoverpay. As you may see from the table, while maintaining similar or better point cloud accuracy, RESEPI is asolution that is much less costly when compared to the competition.
Why Pay More?
Features
Supply Chain Management
Competitive PricingAs a current supplier of inertial navigationtechnology, Inertial Labs can provide the mostcost-efficient pricing for partners.
Value Added Resellers can focus on growing theirbusiness rather than developing the payloadproduct. We will support and grow the producttogether to meet the market requirements with acommitment to supplying the best price/performance solution to our business partners.
-
With price discounts for partners and anuncompromising focus on value and quality, we areconfident that you will be put in the best positionto succeed.
RESEPI in Action
Equipment Model Used
Drone DJI Matrice M600
Scanner VLP-32
MountingDamperzen Vibration
Isolator
Camera Sony A6000
Payload RESEPI
This test was conducted on September 14, 2020with minimal to no cloud cover, a temperature of75°F (24°C), and a clear line of sight for satellitevisibility. Wind speed varied during the flight fromonly a few mph up to 5mph.
The RESEPI payload was assembled in house,calibrated, tested and verified for performanceprior to the flight with the Sony A6000 camera.
Test Setup
Methods
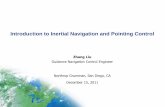
The test ultimately concluded with the generationof a colorized point cloud that accurately capturedthe entirety of the premises. After analyzing thecloud in Displaz, its thickness was within 3-5centimeters. In addition, the viewer was able toclearly see thin objects such as power lines.
Results
RTCM corrections were sent to the payloadthroughout the duration of the test so that pointclouds could be generated to form an RTK solutionand a PPK solution.
After communication over the RESEPI’s onboardWiFi network was established and GNSSconnectivity had been verified, the test flight wasinitialized by sending the command to the on-board flight computer. The scan flight began with ahorizontal, straight-line flight reaching a setvelocity to allow for GNSS heading corrections tobegin being filtered into the INS solution. After thisstraight flight, convergence maneuvers (as figureeights) were done to allow GNSS heading to befused properly with inertial data from the IMU andto be used in PPK software.
The flight path followed a multipath scan pattern,and after the scan was complete the USB drive thatcontained all data files needed for processing theclouds was removed from the RESEPI.
Inertial Explorer was used for post-processinginertial data and generating a post-processedtrajectory. The in-flight RTK trajectory and the PPKtrajectory from Inertial Explorer were imported tosoftware created by Inertial Labs for cloudgeneration. Then, the point cloud was colorizedusing the time-stamped photographs taken fromthe Sony A6000.
-
Trademark Legal Notice: All product names, logos, and brands are property of their respectiveowners. All company, product and service names used in this document are for identificationpurposes only. Use of names, logos, pictures, units and brands does not imply endorsement. NVIDIA,NovAtel, TerraStar, OmniStar, Oceanix, SmartNet, Sapcorda, Velodyne, Quanergy, Ouster, Livox,Sony, FLIR, Damperzen, and DJI are trademarks of its affiliates or its respective owners, registered inmany jurisdictions worldwide.
The Inertial Labs RESEPI is an ultra-affordablesolution for extremely accurate Remote Sensingapplications. As a small, low power, andincredibly lightweight system, RESEPI is designedto fit the size and power requirements of anyproject and allows the user to fly longer andcollect more data. In addition, the RESEPI’shighly automated software suite with automaticRTK LAS file generation, along with a 1-clickcommand line interface, makes point-cloudgeneration fast and easy. The RESEPI featuresmultiple integration and can be used for a widevariety of applications in many industries. TheRESEPI can accurately inspect power lines andconstruction sites, perform land and topographicinspection, and to survey land for precisionagriculture.
The Big Picture
Contact Information
What Do
You
Think?
Here at Inertial Labs, we care about our customers
satisfaction and want to continuously be able toprovide solutions that are specifically tailoredto problems that are occurring today, whilevigorously developing products to tackle theproblems of tomorrow. Your opinion is alwaysimportant to us! Whether you are a student, anentrepreneur, or an industry heavyweight.Share your thoughts on our products,recommendations you have, or just say hello [email protected].
Address: 39959 Catoctin Ridge Street, Paeonian Springs, VA 20129 U.S.A.
Website: www.inertiallabs.com
Inertial Labs' newest platform, RESEPI, is arevolutionary one-stop turnkey solution for start-ups in the industry or businesses looking to expandinto the rapidly growing LiDAR scanning payloadmarket.
Inertial Labs' optimized supply chain managementand the ability to provide custom integratedsolutions gives any partner all the tools they needto grow their business. With a 1 click command lineinterface, along with the ability to have fullyautomated RTK LAS file generation, RESEPIcontinues to push the industry boundaries of whatis possible.
RESEPI
https://emea01.safelinks.protection.outlook.com/?url=http://www.inertiallabs.com/&data=01|01|[email protected]|e5f8379a41bd469cecc608d6920721bf|37155b7b4b0e488cb3fee84c1d1b7f85|0&sdata=7NGbgRn/qxEYY0tJ3g%2B6YcBeYukTs91uGx%2B4BORdK7g%3D&reserved=0
-
About Inertial Labs Inc.
Established in 2001, Inertial Labs is a leader in position and orientation technologies for commercial,
industrial, aerospace and defense applications. Inertial Labs has a worldwide distributor and
representative network covering 20+ countries across 6 continents and a standard product line spanning
from Inertial Measurement Units (IMU) to GPS-Aided Inertial Navigation Systems (INS). With application
breadth on Land, Air, and Sea; Inertial Labs covers the gambit of inertial technologies and solutions.
Inertial Labs, Inc.39959 Catoctin Ridge Street,Paeonian Springs, VA 20129 USAphone: +1 (703) 880 [email protected]