Inelastic flattening of rough surfaces
13
Inelastic flattening of rough surfaces Joachim Larsson a , Shiro Biwa b , Bertil Stor akers a, * a Department of Solid Mechanics, Royal Institute of Technology, S-100 44 Stockholm, Sweden b Department of Micro System Engineering, Nagoya University, Nagoya, 464-8603 Japan Received 26 May 1998 Abstract When rough surfaces are impressed, the electrical, thermal and mechanical contact properties will originally be imperfect as compared to smooth surfaces. Here the initial mechanical contact at inelastic materials is analysed for residual plastic strain-hardening and creep deformation when two rough surfaces are approached. First a self-consistent micro-mechanical analysis is carried out for general viscoplastic impression of a single asperity based on self-similarity and stationary contact. Probabilistic models of surface topography are then employed to determine the macroscopic flattening behaviour for a distribution of asperities. Relations between contact area, impression depth and loading are determined with high accuracy and their validity compared with earlier significant experimental findings. In particular it is shown that the contact pressure–area connection is nonlinear. Estimates are given for the degree of roughness re- quired for flattening to be essentially plastic. A prototype model based on fractal surface geometry is outlined using scale-independent parameters and its virtues and shortcomings discussed. Ó 1999 Elsevier Science Ltd. All rights reserved. Keywords: Indentation; Viscoplasticity; Self-similarity; Rough surfaces; Asperities and flattening 1. Introduction When studied on a suciently fine scale, all solids are found to be rough. The level or rough- ness depends on the surface preparation but even the most thoroughly polished surfaces show ir- regularities, asperities, at dimensions which are of orders larger than interatomic distances. As a consequence, at incipient approach of two sur- faces, contact will be imperfect and electrical, thermal and mechanical properties will be aected and in general in a dierent way as if surfaces are assumed smooth. The mechanical implications are manifold and involve issues of friction, wear and fatigue on one hand and elements like bearings, gears and seals on the other. Accordingly numer- ous theoretical and experimental investigations have been devoted to the matter especially for elastic behaviour but here inelastic flattening of rough surfaces are to be investigated. The consti- tutive properties adopted are viscoplastic with strain-hardening plasticity on one extreme and pure power law creep on the other. A standard way to attack the problem is to first solve the problem for a single asperity and then by neglecting interaction determine macroscopic sur- face properties based on some statistical model, e.g. Greenwood and Williamson (1966), Chang et al. (1987), Kucharski et al. (1994) or a fractal model e.g. Majumdar and Bhushan (1991), Kom- vopolous and Choi (1992). This procedure will Mechanics of Materials 31 (1999) 29–41 * Corresponding author. E-mail: [email protected]. 0167-6636/99/$ – see front matter Ó 1999 Elsevier Science Ltd. All rights reserved. PII: S 0 1 6 7 - 6 6 3 6 ( 9 8 ) 0 0 0 4 6 - 5
-
Upload
joachim-larsson -
Category
Documents
-
view
213 -
download
1
Transcript of Inelastic flattening of rough surfaces

Inelastic ¯attening of rough surfaces
Joachim Larsson a, Shiro Biwa b, Bertil Stor�akers a,*
a Department of Solid Mechanics, Royal Institute of Technology, S-100 44 Stockholm, Swedenb Department of Micro System Engineering, Nagoya University, Nagoya, 464-8603 Japan
Received 26 May 1998
Abstract
When rough surfaces are impressed, the electrical, thermal and mechanical contact properties will originally be
imperfect as compared to smooth surfaces. Here the initial mechanical contact at inelastic materials is analysed for
residual plastic strain-hardening and creep deformation when two rough surfaces are approached. First a self-consistent
micro-mechanical analysis is carried out for general viscoplastic impression of a single asperity based on self-similarity
and stationary contact. Probabilistic models of surface topography are then employed to determine the macroscopic
¯attening behaviour for a distribution of asperities. Relations between contact area, impression depth and loading are
determined with high accuracy and their validity compared with earlier signi®cant experimental ®ndings. In particular it
is shown that the contact pressure±area connection is nonlinear. Estimates are given for the degree of roughness re-
quired for ¯attening to be essentially plastic. A prototype model based on fractal surface geometry is outlined using
scale-independent parameters and its virtues and shortcomings discussed. Ó 1999 Elsevier Science Ltd. All rights
reserved.
Keywords: Indentation; Viscoplasticity; Self-similarity; Rough surfaces; Asperities and ¯attening
1. Introduction
When studied on a su�ciently ®ne scale, allsolids are found to be rough. The level or rough-ness depends on the surface preparation but eventhe most thoroughly polished surfaces show ir-regularities, asperities, at dimensions which are oforders larger than interatomic distances. As aconsequence, at incipient approach of two sur-faces, contact will be imperfect and electrical,thermal and mechanical properties will be a�ectedand in general in a di�erent way as if surfaces areassumed smooth. The mechanical implications aremanifold and involve issues of friction, wear and
fatigue on one hand and elements like bearings,gears and seals on the other. Accordingly numer-ous theoretical and experimental investigationshave been devoted to the matter especially forelastic behaviour but here inelastic ¯attening ofrough surfaces are to be investigated. The consti-tutive properties adopted are viscoplastic withstrain-hardening plasticity on one extreme andpure power law creep on the other.
A standard way to attack the problem is to ®rstsolve the problem for a single asperity and then byneglecting interaction determine macroscopic sur-face properties based on some statistical model,e.g. Greenwood and Williamson (1966), Chang etal. (1987), Kucharski et al. (1994) or a fractalmodel e.g. Majumdar and Bhushan (1991), Kom-vopolous and Choi (1992). This procedure will
Mechanics of Materials 31 (1999) 29±41
* Corresponding author. E-mail: [email protected].
0167-6636/99/$ ± see front matter Ó 1999 Elsevier Science Ltd. All rights reserved.
PII: S 0 1 6 7 - 6 6 3 6 ( 9 8 ) 0 0 0 4 6 - 5

also be followed here starting from a recent con-cise determination of the local contact behaviourof inelastic asperities. Thus highly accurate resultswere given by StoraÊkers et al. (1997) between im-pression, contact area and loading for a variety ofinelastic materials and a much discussed issue re-garding volume preservation is clari®ed in detail.
A classical investigation is due to Greenwoodand Williamson (1966) who determined roughsurface ¯attening based on a statistical distributionof asperity summit heights having an averagespherical shape. In particular the pressure contactarea relation was determined based on Hertziancontact for elastic materials and approximately sofor plasticity when a surface is fairly rough. Thebasic stochastic model has later been generalizedby introduction of additional statistical parame-ters as summarized by Francis (1977) and alsotaking more detailed modelling of elastoplasticityinto account but some basic questions still remainregarding the macroscopic behaviour of roughsurface ¯attening. One issue of concern is the ex-perimental ®ndings by Uppal and Probert (1973)and Woo and Thomas (1980) that the relationbetween load and real contact area is in generalnonlinear. Although this may be explained by theinteraction of asperities, cf. e.g. Komvopolous andChoi (1992), the e�ect still persists at incipientcontact. Here the single asperity solution derivedfor strain-hardening plasticity is combined with aGaussian distribution of summit heights, in thespirit of Greenwood and Williamson (1966), andthe predictions found to be in satisfactory agree-ment with the experiments of four metals by Uppaland Probert (1973).
Several ways have been used to measure andassess the topography of surfaces be they by stylusor optical methods, phase contact microscopy andelectrical conduction as summarized by Woo andThomas (1980). Later sophistical methods based inscanning tunnelling microscopy have been used byMajumdar and Bhushan (1991) on the nanoscale.Still on the microscale the standard method is byuse of a pro®lometer where a ®ne stylus is draggedalong the surface and its vertical displacementdetermined as a function of the distance travelled.This method was used in a recent careful investi-gation of two degrees of sand-blasted carbon steel
by Kucharski et al. (1994). The results are com-pared with the present predictions of relevantmacroscopic roughness parameters.
Although statistical roughness models havebeen used since long and maturity has beenobtained in deriving contact models, still themeasured roughness depends strongly on the res-olution of the measuring instrument used. Morerecently it has been found that rough surfacesshow fractal geometry and consequently an anal-ysis can be carried out in a scale-independent wayby self-similarity or self-a�nity. Several modelshave been proposed and Borodich and Mosolov(1992) explained how the length of rough metalsurface pro®les follows in the same manner as thelength of coastlines in the celebrated ®nding byMandelbrot (1975). From this outset Borodichand Mosolov (1992) constructed a primitive modelfor ¯at perfectly plastic asperities based on aCantor set of repeatedly magni®ed scales. Thesame model has been used also for instance forelastic±plastic materials by Warren and Krajci-novic (1995) but although sketched for a three-dimensional case by Borodich and Mosolov (1992)it is based on slip-line theory and essentially two-dimensional.
A di�erent fractal approach was used by Ma-jumdar and Bhushan (1991) starting from ananalogy between contact spots and Mandelbrot's(Mandelbrot (1975)) ®ndings of the fractal prop-erties of the number and areas of islands. A re-duced Weierstrass±Mandelbrot wave function wasadopted for surface pro®les and a model devel-oped for ¯attening of elastic±perfectly plastic as-perities. As this model is based on sphericalasperities the resulting surface roughness model isessentially three-dimensional. With some modi®-cations it will here be analyzed for strain-harden-ing materials and the resulting predictionsdiscussed in some detail.
2. Local contact behaviour of inelastic asperities
The auxiliary problem to be discussed ®rstconcerns concise expressions for the resulting forceand contact area when the approach between twoasperities is prescribed. The material properties
30 J. Larsson et al. / Mechanics of Materials 31 (1999) 29±41

adopted are viscoplastic, combining strain-hard-ening plasticity with rate-sensitivity or creep. Adetailed analysis for spherical contact has recentlybeen performed by StoraÊkers et al. (1997) and onlythe necessary details will be given here.
In general two spherical bodies at incipientcontact, as shown in Fig. 1(a), may have di�erentradii of curvature R1, R2. When local slopes aresmall, however, and accordingly Hertzian linearkinematics is applicable, the contact behaviourmay be analysed by a reduced radius of curvature1=R � 1=R1 � 1=R2, where a half-space is subjectedto indentation by a rigid sphere, Fig. 1(b). Also fora distribution of asperities their individual (con-tact) topographies may be related to that of asummed surface, Greenwood and Tripp (1971),Johnson (1985).
Also as a reduced rigidity for dissimilar contactmay be derived and to be further discussed below,then the case of a rigid sphere of radius R andsubjected to an indentation h by a deforming half-space, as in Fig. 1(b), will be considered ®rst.
The initial shape of the sphere is given, withinthe Hertz assumption, by
f �r� � r2
2R; r6 a �1�
assuming axial symmetry.At normal indentation by h, the single kine-
matic boundary condition reduces to
u3�r� � hÿ r2
2R�2�
by Eq. (1), where a is the resulting so far unknowncontact radius, as in Fig. 1(b). Frictionless contactis assumed and accordingly conjugate tractionswill vanish.
The viscoplastic properties of the half-space aregiven by
r � r0eM _eN �3�
in a uniaxial form and ordinary notation, where r0
is a material yield parameter and M and N hard-ening and creep exponents, respectively.
With this setting sketched, it was ®rst shown byHill et al. (1989) for the case of strain-hardeningmaterials, N� 0, and deformation theory of plas-ticity that the contact problem posed posses asimilarity solution with stationary properties. Adetailed ®nite element study was carried out tosolve the ®eld equations based on von Mises yieldand in particular the relation between indentationdepth, contact radius and load was used to analyseBrinell hardness testing. In subsequent studies,analogous ®ndings were found to prevail for dif-ferent material behaviour such as creep, StoraÊkersand Larsson (1994), plastic ¯ow theory, Biwa andStoraÊkers (1995), and viscoplasticity, StoraÊkers etal. (1997).
A common feature of these e�orts is that, due tothe power-law behaviour of Eq. (3), the resultingcontact radius a, as in Fig. 1(b), reduces to
a2 � 2c2hR; �4�where in particular the invariant c2 � c2�M ;N� isonly a function of the strain-hardening and creepexponents M and N, respectively.
By introducing Eq. (4) into Eq. (2) yielding
u3 � a2
2c2R1ÿ c2 r2
a2
� �; r6 a �5�
it is immediately clear that if c2 > 1, ``piling up''will occur at the contact boundary, while other-wise ``sinking in'' will prevail.
In their ®nite element study based on self-sim-ilarity and stationary ®elds, StoraÊkers et al. (1997)found that within a very good accuracyc2�M ;N� � c2�M � N� and speci®cally
Fig. 1. Local asperity contact model; (a) compression of two
dissimilar spheres; and (b) rigid sphere indentation of a de-
forming half-space (Brinell indentation).
J. Larsson et al. / Mechanics of Materials 31 (1999) 29±41 31

c2 � 1:43 exp�ÿ0:97�M � N��: �6�Thus for instance in the time-independent per-
fectly plastic case, M�N� 0, c2 � 1:43 implyingextensive piling up at the contact boundary whilein the linear case, M� 1, N� 0, c2 � 0:50 ap-proximately with sinking in according to Hertzelastic contact theory. The consequences of as-sumed incompressible behaviour have been sub-jected to some debate in the literature but it goeswithout further saying that the material volume ispreserved in the present analysis without any fur-ther deliberations.
Having the invariant relation between the con-tact radius, a, and the indentation depth, h securedby Eqs. (4) and (5), it remains to determine theresulting force F as in Fig. 1(b). This was also donein the detailed ®nite element analysis by Stor�akerset al. (1997) who found, again within high accu-racy, that the load is related to the contact radiusby
F � apa2r0�1� 2N� ba2R
� �M b _a2R
!N
; �7�
where a � 3; b � 1=3 are universal constants.With the fundamental problem thus solved,
the solution for two dissimilar spheres mayreadily be read o� from this solution. Thus re-lating to Fig. 1(a) with radii R1;R2 and yieldparameters r1;r2 as was shown by StoraÊkers etal. (1997), the present values R; r0 may simply bereplaced by
1
R� 1
R1
� 1
R2
�8�
and
1
r1=�M�N�0
� 1
r1=�M�N�1
� 1
r1=�M�N�2
�9�
with further details given by StoraÊkers (1997). Itshould be emphasized that the radii in Eq. (8)must not necessarily be positive, as when a summitis in contact with a valley. When no approximatingassumptions are involved the material exponentsare restricted to be identical though save for thesingle but important exception when one of thematerials are essentially rigid.
It was assumed above that the contact is fric-tionless. The in¯uence of friction was recently in-vestigated by Carlsson et al. (1998) and found tobe of little importance for global variables and nomore than a few percent. At most, in case of per-fect plasticity, the di�erence was less than 5% atdetermination of the contact load.
3. Rough surface ¯attening based on probabilistic
models
When two rough surfaces come into contact asshown in Fig. 2(a), only their relative motion is ofinterest to analyse the contact problem. Thus atincipient contact the di�erence between their sep-aration may be related to a mean plane as shownin Fig. 2(b), with the impression given by a planeat distance d. For random surfaces and adopting aprobabilistic model, the number of contacts, N,between the impressing plane and the asperitysummits may be expressed as
N � gA0
Z10
Z1d
/�zs;Rs� dzsdRs �10�
following Greenwood and Williamson (1966),where g is the density of summits per unit area. InEq. (10) A0 is the nominal surface area and
Fig. 2. Rough surfaces in contact; (a) schematics of the surface
pro®les of two rough surfaces in contact; and (b) summed
surface model with one equivalent rough surface and a smooth
impression plane.
32 J. Larsson et al. / Mechanics of Materials 31 (1999) 29±41

/�zs;Rs� the probability function of the summitheights, zs, and their associated curvatures, 1=Rs,these being the only geometric variables involvedin the single asperity analysis, Eq. (4).
At ¯attening, each asperity in contact will resistcompression by a local normal force Fs. Its mag-nitude will depend solely on the asperity geometryand the material properties, as explained above,together with the relative impression depth,hs � zs ÿ d; according to Fig. 2(b), as no interac-tion is assumed in the initial stage.
Remembering Eqs. (4) and (7) the force on asingle asperity may be implicitly expressed as
Fs � Fs�hs;Rs; r0;M ;N� �11�and similarly the created area of contact is
As � As�hs;Rs;M ;N�: �12�The total force required to ¯atten a rough sur-
face at a given separation, d, is obtained by sum-ming the local forces, Eq. (11), of each contactover the nominal surface area, A0. Adopting theprobability function /�zs;Rs� as introduced inEq. (10), accordingly the total force becomes
F � gA0
Z10
Z1d
Fs�zs ÿ d;Rs�/�zs;Rs�dzsdRs �13�
and the total area of contact is given by
A � gA0
Z10
Z1d
As�zs ÿ d;Rs�/�zs;Rs�dzsdRs: �14�
The analysis so far is essentially in conformitywith the classical investigations of Greenwood andWilliamson (1966) and as may be seen fromEqs. (13) and (14) there will be no essential loss ofgenerality by using an average radius Rs and thiswill be adopted in the spirit of these writers.
Accordingly with R � Rs the local contact forceFs and area As reduce to
Fs � 4p�1� 2N�abM�Nr0R2
� c2hs
2R
� �1�M=2�N=2 _hs
2hs
!N
�15�
by Eqs. (4) and (7) and
As � 2pc2hsR �16�by Eq. (4).
To explicitly determine the resulting contactforce and area by Eqs. (15) and (16), it provesconvenient to introduce a dimensionless variable,s � zs=r, where r is the standard deviation of theprobability function /. Thus by Eqs. (13)±(16)there results
FA0
� p0 � 4pg�1� 2N�abM�Nr0R2
� c2r2R
� �1�M=2�N=2
ÿ_dr
!N
I1�M=2ÿN=2; �17�
where
I1�M=2ÿN=2 �Z1d=r
sÿ dr
� �1�M=2ÿN=2
/�s� ds �18�
and
AA0
� Ar � 2pgc2rRI1; �19�
where
I1 � I1�M=2ÿN=2�M � N � 0�: �20�Although time-dependent e�ects have been
considered in roughness analysis by a few writers,cf. e.g. Elzey and Wadley (1993) and Takahashiand Tanimoto (1995), from now on emphasis willbe put on time-independent hardening plasticity,N� 0. It may ®rst be observed then that thestructure of Eq. (17), with N� 0, is closely relatedto the Brinell hardness
HB � ar0
ba0
2R0
� �M
; �21�
where a0 is the contact radius resulting from ahardness test at a given impression force by a ballof radius R0.
Thus by Eq. (17) in analogy with Eq. (21)
p0 � 2pgc2rRH
�������c2r2R
r !I1�M=2; �22�
where���������������c2r=2R
pis the argument corresponding to
ba0=2R0 in Eq. (21).
J. Larsson et al. / Mechanics of Materials 31 (1999) 29±41 33

By introducing a dimensionless roughness pa-rameter, �g, as
�g � 2pgrR �23�the normalized nominal pressure, �p0, may be ex-pressed as
�p0 �p0
�gH���������������c2r=2R
p� � � c2I1�M=2 �24�
by Eqs. (22) and (23).
Likewise the normalized relative contact area,�A, may be written as
�A � Ar
�g� c2I1 �25�
by Eqs. (19) and (23).As a ®rst ®nding it may be seen from Eqs. (24)
and (25) that in case of perfect plasticity, M � 0,the true contact pressure p � �p0H= �A reduces to
p � HB �26�independently of the impression depth. Remem-bering the structure of Eqs. (13)±(16), Eq. (26)also holds true for any probability function/�zs;Rs� and this result is perhaps also obviousfrom ®rst principles.
In order to obtain explicit results now for thecase of hardening, M > 0, a speci®c probabilityfunction / for the surface topography must beused. Greenwood and Williamson (1966) adoptedan exponential distribution of asperity summitheights
/ � exp�ÿs� �27�and also a Gaussian (normal) distribution
/ � 1���2p
pexp�ÿs2=2� �28�
in the present notation.Examining the exponential distribution ®rst and
introducing Eq. (27) into Eq. (18), Eq. (24) yieldsfor nominal reduced pressure
�p0 � c2�1�M=2�! exp�ÿd=r� �29�and Eq. (25) for the reduced true contact area
�A � c2 exp�ÿd=r�: �30�
As a consequence the true contact pressure re-duces to
p � �1�M=2�!H�������c2r2R
r !�31�
and is in this case found to be independent of theseparation depth, d, also at hardening materials.
A Gaussian distribution, as in Eq. (28), is per-haps a more realistic model but explicit resultshave to be found by numerical quadrature ofEq. (18). The result is shown in Fig. 3 for somevalues of the hardening exponent M. Essentiallythe reduced nominal pressure, �p0=c2; Eq. (24), isgiven as a function of the relative separation depthd=r. Likewise the reduced true contact area, �A=c2,Eq. (25), may be found from Fig. 3 setting M� 0.
As they stand the contact pressure and areagiven in Fig. 3 are from a practical point of viewnot very useful being functions of the separationdepth d rather than impression depth zmax ÿ d. Thepressure �p0 and area �A are, however, related im-plicitly through the separation depth and may beexplicitly determined as shown in Fig. 4. As a ®rstobservation it may be seen that the slope betweenthe contact area and pressure is less than unity forM > 0, as was experimentally found a.o. by Uppaland Probert (1973) and Woo and Thomas (1980).
Fig. 3. Reduced nominal contact pressure normalized by c2
versus dimensionless separation depicted for di�erent values of
the strain-hardening exponent, M, M � 0 �б�, M� 0.5 �. . .�and M � 1 (± ± ±).
34 J. Larsson et al. / Mechanics of Materials 31 (1999) 29±41

Although substantial experimental progress hasbeen made for ¯attening of rough surfaces, somedi�culties still remain when comparing the presentpredictions for strain-hardening materials withexperimental observations. In particular data giv-en for material behaviour are often scarce andmostly given simply by a yield stress and eventu-ally a hardening value.
A similar structure of the pressure relation,Eq. (22), was predicted in an early analysis byHalling and Nuri (1974). Starting from theGreenwood and Williamson (1966) stochasticmodel, Halling and Nuri (1974) proposed that theinvariant c2 in Eq. (4) in the present notationshould only depend on the material degree ofstrain-hardening where c2 � 0:5 for the linearcase. By a combination of tensile tests and ballindentation for di�erent materials, Halling andNuri (1974) determined c2 for speci®c values ofthe hardening exponent M for four materials withM � 0:15 being the smallest for lead. Perfectplasticity, M � 0, was given by c2 � 1 in contrastto the present computed value c2 � 1:43, Eq. (6),implying pronounced piling up. Although with noroughness experiments carried out, by theirpragmatic combination of theory and ball in-dentation results, the present Eq. (34) based on aself-consistent theory has the same structure as
the resulting equation by Halling and Nuri(1974).
It was concluded above that irrespective of theprobabilistic function adopted, in case of perfectlyplastic material behaviour the true contact area isproportional to the loading. It has been found byseveral writers, however, cf. e.g. Uppal and Pro-bert (1973) and Woo and Thomas (1980), that thearea of contact does not vary linearly with theload, but to a smaller power i.e.
Ar � p0
H
� �b; �32�
where b < 1.It will be expected for large values of the rela-
tive true contact area Ar, greater than 10% say,that interaction between asperities will occur and anonlinear behaviour is to be expected as alsopointed out by Uppal and Probert (1973) and Wooand Thomas (1980). It was shown, however, bythese investigators that also in the intermediaterange, 10ÿ3 < Ar < 10ÿ1, the e�ect still persists andno explanation seems to have been found so far. Itis believed though that this is due to strain-hard-ening plastic deformation as has already been in-dicated above.
Uppal and Probert (1973) carried out ¯atteningexperiments on aluminium, tin, copper and silverand recorded the surface separation, the contactarea and the contact force. The bearing lengthfraction, corresponding to the contact area, wasmeasured in an optical way based on the interceptof the surface pro®le plateaux of the residual de-formation. Uppal and Probert (1973) did not re-port any material parameters save for the Vickershardness, HV, nor any complete roughness pa-rameters. From the experimental ¯attening results,however, for H � HV in Eq. (22) with a Gaussiansummit height distribution there is a decreasingtrend of values of the exponent b for materialsshowing increasing hardening. In Fig. 5 the truecontact area is depicted as a function of the re-duced nominal pressure, Eqs. (25) and (24), re-spectively, based on logarithmic scales with theroughness parameter �g, Eq. (23), set to unity forthree di�erent values of the hardening exponentM. The corresponding values are inserted forp0=H � 0:01 from Eq. (32) for the exponent b
Fig. 4. Reduced relative contact area, �A, versus reduced nomi-
nal contact pressure, �p0, depicted for di�erent values of the
strain-hardening exponent, M. M � 0 �б�;M � 0:5 �. . .� and
M� 1 (± ± ±).
J. Larsson et al. / Mechanics of Materials 31 (1999) 29±41 35

determined experimentally for low loads by Uppaland Probert (1973) and for aluminium�b � 0:94ÿ 0:96�, tin (0.94), copper(0.89) and sil-ver (0.87). Although no speci®c hardening valueswere communicated by Uppal and Probert (1973),it is believed that the theoretical area±load rela-tions given in Fig. 5, are predicted qualitatively incorrect order as regards hardening of the di�erentmetals.
The nonlinear feature just discussed has alsobeen emphasized in an experimental review byWoo and Thomas (1980). From the results of sixdi�erent investigations of various materials and awide loading range, 10ÿ4 < p0=H < 1:0, a straightline was ®tted by regression on logarithmic scalesby Eq. (32). For 162 points the resulting exponentb was found to be 0.83 and thus comparable tothat of Uppal and Probert (1973).
A detailed experimental investigation of ¯at-tening of rough surface specimens made of carbonsteel was recently carried out by Kucharski et al.(1994). Two di�erent degrees of roughness were
tested for three sand-blasted specimens each, thesurface treatment giving an isotropic texture andtopography measurements made by stylus prof-ilometry. Roughness parameters were provided ingreat detail and in the present notation pertinentrecordings, denoted E60/E30, are r � 2:31=4:79lm, zmax � 9:9=19:9 lm, R � 30:0=153:0 lm, andg � 655:4=326:8 mmÿ2, respectively, where zmax isthe height of highest summit above the summitmean plane.
The specimens used contained 0.45% carbonand material properties were given as Young'smodulus, the initial yield strength and a plastictangent modulus as a mean value of the completeengineering stress±strain curve, Kucharski (1997).With the present power-law model in mind, theproperties of a normalized 0.45% carbon steel, SIS1650, were adopted for comparison. For an ulti-mate tensile strength of 640 MPa at a strain of0.20, based on Cauchy stress and logaritmic strain,the constitutive parameters presently used werer0 � 985 MPa and M� 0.15.
In Fig. 6 the true relative contact area asfunction of the nominal pressure is depicted forthe experimental observations by Kucharski et al.(1994) with the residual contact area determined
Fig. 6. Relative contact area, Ar, versus dimensionless nominal
pressure, p0=r0; from experimental observations by Kucharski
et al. (1994) for two di�erent surfaces, E30 (s) and E60 (*),
respectively, in comparison with the predictions of the present
theory (±±±) and Kucharski et al. (± ± ± ±).
Fig. 5. Relative contact area, Ar, versus dimensionless nominal
pressure, po=H , depicted for di�erent values of the strain-
hardening exponent, M. M � 0 �б� M � 0:5 �. . .� and M � 1
�б�. Experimental data according to Uppal and Probert
(1973) for di�erent materials, (s) Aluminium. (+) Tin, ���Silver and (*) Copper.
36 J. Larsson et al. / Mechanics of Materials 31 (1999) 29±41

by 3D topography within an error of less than10%. Comparison is made with the current pre-dictions based on a Gaussian distribution and theagreement is seen to be quite good in particularfor the initial part of the loading. A similar the-oretical procedure was also worked out by Ku-charski et al. (1994) starting from a ®nite elementanalysis of indenting spheres with moving contactboundaries. The contact area-loading relationspredicted by these writers based on elastoplastic-ity with linear hardening are also shown in Fig. 6using the present normalization. The resultingtrend is the same although with somewhat lowercompliance.
In Fig. 7 the corresponding results are given forthe ¯attening depth, zmax ÿ d, as a function of theloading. In both the theoretical models, zmax ischosen as the upper limit of the integration for zs
of the Gaussian probability function in Eq. (10).As may be seen the agreement is in all cases quitesatisfactory, the compliance predicted by Ku-charski et al. (1994) again being a little lower.
For elastic±plastic materials it is important todetermine when plastic e�ects dominate at surface¯attening as no elastic e�ects have been accountedfor above. It has been suggested by Hutchins
(1992) in many practical cases of contact betweenmetals, that by theory and experiments, the ma-jority of contacts will be plastic unless the surfaceis very smooth. In a full elastoplastic analysis,however, some transient stages may be distin-guished until fully plastic ¯ow is achieved. For ballindentation it is well known that yield will com-mence at a location below the surface on thesymmetry axis at a distance being approximatelyhalf the contact radius. Plastic ¯ow will then startto grow in a contained manner and subsequentlyreach the free surface when ®nally a fully plasticregion will develop.
A quantitative measure to de®ne the elasto-plastic regime has been proposed by Johnson(1970) by ball indentation, a0;R0; in the form
K � Ea0
�1ÿ m2�ryR0
; �33�
where ry is a representative yield stress ate � 0:2a0=R0 and E; m the ordinary elasticity pa-rameters.
In their analysis of plastic ¯ow theory atspherical indentation, Biwa and Stor�akers (1995)considered also the elastoplastic case by astraightforward ABAQUS procedure involving amoving boundary. Brie¯y, it was found that forrepresentative materials, when K > 30 approxi-mately a fully plastic region was attained. Thereremains then to relate this ®nding to the ¯atteningof a surface.
Greenwood and Williamson (1966) introduceda proportion of asperity contacts at plastic ¯ow bya plasticity index
w � EH
rR
� �1=2
; �34�
where H is the indentation hardness of the mate-rial and r the standard deviation of the distribu-tion of asperity heights. Hutchins (1992) foundthat for metal surfaces, w lies in the range 0.1±100,where in particular for aluminium w > 1 in theplastic regime and for bead±blasted aluminiumGreenwood and Willamson found that w � 30.Now setting H � 3ry in Eq. (33) and rememberingEq. (4), by Eqs. (33) and (34) h=r may be ap-proximated by
Fig. 7. Dimensionless normal approach, 1ÿ d=zmax, versus di-
mensionless nominal pressure, p0=r0, from experimental ob-
servations by Kucharski et al. (1994) for two di�erent surfaces,
E30 (s) and E60 (*), respectively, in comparison with the
predictions of the present theory (±±±±) and Kucharski et al.
(± ± ±).
J. Larsson et al. / Mechanics of Materials 31 (1999) 29±41 37

hr� 1
30
K2
w2: �35�
Thus for a coarsely ground surface whenw � 10, say, h=r � 0:3 implying that the contri-bution to the total load, Eq. (17) will give a devi-ation of the tail at the lower limit of the integratedprobability function (18). In particular though as ithas been found that the Gaussian distribution re-produces the in¯uence of smaller asperities lesswell, this e�ect is not essential. Even with highvalues of the plasticity index there is a small shareof asperities deforming elastically. The contactareas are very small though and will have a neg-ligible e�ect on the global force and area param-eters. In the experimental investigation byKucharski et al. (1994) for two degrees of rough-ness, the values of w were about 40 and 25, re-spectively, and accordingly elasticity e�ects arefound negligible.
In their investigation of Brinell indentation,Biwa and Stor�akers (1995) found that fully plastic¯ow was contained essentially within three timesthe radius of contact at least in case of perfectplasticity. For a distribution of asperities it followsthat interaction is not to be expected until therelative true contact area exceeds about 10%.
4. Rough surface ¯attening based on a fractal model
Although probabilistic models have been usedextensively and some maturity has been obtainedto analyse ¯attening of rough surfaces in contact,more recently some alternative models, still at anearly stage, have been introduced based on fractalgeometry. It should be emphasized that measuredroughness parameters depend strongly on theresolution of the measuring instrument and the useof scale-invariant parameters will possess de®niteadvantages. The only three-dimensional analysisavailable and based also on experiments seems tobe that of Majumdar and Bhushan (1990, 1991)and it will be followed here with some modi®ca-tions.
It was Mandelbrot (1975) who showed that thesize distribution of islands on the earth's surfacefollows a power-law behaviour, i.e.
N � Sl
S
� �D=2
; �36�
where, at a speci®ed water level, N is the totalnumber of islands areas larger than S, Sl being thelargest, and D is the fractal dimension of thecoastline, 1 < D < 2: From this outset Majumdarand Bhushan (1990) adopted in analogy with this®nding, the number of asperity contact spots intheir investigation of rough surfaces. Accordinglyfrom Eq. (36), the rate of increase of the totalnumber of asperities per unit area at a cutting-o�plane of a rough surface is
n�S� � ÿ dNdS� D
2SSl
S
� �D=2
: �37�
It remains, however, to relate the correspondingsurface pro®le z(x) and the area shapes of the as-perities cut o� as in Fig. 8. The mathematicalproperties of fractal functions show that they arecontinuous, nondi�erential and statistically self-a�ne. It was found by Majumdar and Bhushan(1990) that all these properties are satis®ed by theWeierstrass±Mandelbrot function, ``a mathemati-cal monster'' (Mandelbrot, 1982). The W±Mfunction reads
zW±M�x� � LGL
� �Dÿ1X1n�0
cos2pcnx=Lc�2ÿD�n ;
1 < D < 2; c > 1; �38�where D is the fractal dimension, G is a roughnessparameter depending on the surface treatment andL is a characteristic length of the surface sample.The roughness spectrum is determined by c.
The parameters D and G in Eq. (38) are scaleindependent, in contrast to corresponding pa-rameters introduced in the probability models
Fig. 8. Schematic representation of a rough surface impressed
by a rigid plane, with spherical caps at the cut-o� level ac-
cording to the fractal geometry model introduced.
38 J. Larsson et al. / Mechanics of Materials 31 (1999) 29±41
discussed above, and may be determined approx-imately by Berry and Lewis (1980) as
S�x� � G2�Dÿ1�
2 ln c� 1
x5ÿ2D; �39�
where S�x� is the power and x the frequency ofthe roughness spectrum. Thus di�erent lengthscales can be used in the analysis while when usingprobabilistic models the scale is ®xed when mea-suring the surface pro®le.
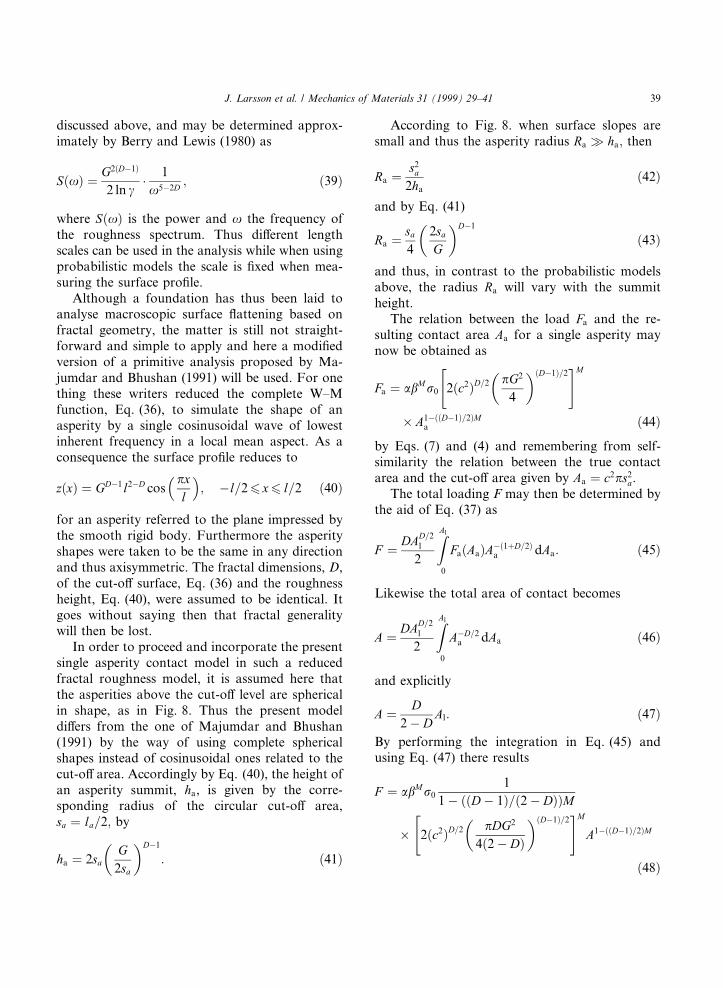
Although a foundation has thus been laid toanalyse macroscopic surface ¯attening based onfractal geometry, the matter is still not straight-forward and simple to apply and here a modi®edversion of a primitive analysis proposed by Ma-jumdar and Bhushan (1991) will be used. For onething these writers reduced the complete W±Mfunction, Eq. (36), to simulate the shape of anasperity by a single cosinusoidal wave of lowestinherent frequency in a local mean aspect. As aconsequence the surface pro®le reduces to
z�x� � GDÿ1l2ÿD cospxl
� �; ÿl=26 x6 l=2 �40�
for an asperity referred to the plane impressed bythe smooth rigid body. Furthermore the asperityshapes were taken to be the same in any directionand thus axisymmetric. The fractal dimensions, D,of the cut-o� surface, Eq. (36) and the roughnessheight, Eq. (40), were assumed to be identical. Itgoes without saying then that fractal generalitywill then be lost.
In order to proceed and incorporate the presentsingle asperity contact model in such a reducedfractal roughness model, it is assumed here thatthe asperities above the cut-o� level are sphericalin shape, as in Fig. 8. Thus the present modeldi�ers from the one of Majumdar and Bhushan(1991) by the way of using complete sphericalshapes instead of cosinusoidal ones related to thecut-o� area. Accordingly by Eq. (40), the height ofan asperity summit, ha, is given by the corre-sponding radius of the circular cut-o� area,sa � la=2; by
ha � 2saG
2sa
� �Dÿ1
: �41�
According to Fig. 8. when surface slopes aresmall and thus the asperity radius Ra � ha; then
Ra � s2a
2ha
�42�
and by Eq. (41)
Ra � sa
4
2sa
G
� �Dÿ1
�43�
and thus, in contrast to the probabilistic modelsabove, the radius Ra will vary with the summitheight.
The relation between the load Fa and the re-sulting contact area Aa for a single asperity maynow be obtained as
Fa � abMr0 2�c2�D=2 pG2
4
� ��Dÿ1�=2" #M
� A1ÿ��Dÿ1�=2�Ma �44�
by Eqs. (7) and (4) and remembering from self-similarity the relation between the true contactarea and the cut-o� area given by Aa � c2ps2
a.The total loading F may then be determined by
the aid of Eq. (37) as
F � DAD=2l
2
ZAl
0
Fa�Aa�Aÿ�1�D=2�a dAa: �45�
Likewise the total area of contact becomes
A � DAD=2l
2
ZAl
0
AÿD=2a dAa �46�
and explicitly
A � D2ÿ D
Al: �47�By performing the integration in Eq. (45) andusing Eq. (47) there results
F � abMr0
1
1ÿ ��Dÿ 1�=�2ÿ D��M
� 2�c2�D=2 pDG2
4�2ÿ D�� ��Dÿ1�=2
" #M
A1ÿ��Dÿ1�=2�M
�48�
J. Larsson et al. / Mechanics of Materials 31 (1999) 29±41 39

and as a consequence the nominal contact pressurep0 may be expressed as
p0 � abMr0
1
1ÿ ��Dÿ 1�=�2ÿ D��M� 2�c2�D=2gf
h iMA1ÿ��Dÿ1�=2�M
r �49�where gf is a fractal roughness parameter
gf �������������
D2ÿ D
r� G2L0
!Dÿ1
�50�
and L0 �����������A0=p
pis the average radius of the
nominal area.Using the hardness measure, H, introduced in
Eq. (21), the pressure may be expressed as
p0 � 1
1ÿ ��Dÿ 1�=�2ÿ D��M H�2�c2�D=2gf�
A1ÿ��Dÿ1�=2�Mr : �51�
As to the impression depth, h, as in Fig. 8. byEq. (4), it may be related to largest asperity con-tact area Al as
h � Al
2pc2Rl�52�
and further, by Eqs. (43), (47) and (50)
h � GDÿ1 4�2ÿ D�pc2D
� A� �1ÿD=2
�53�
as related to the true contact area A.Summarizing from the resulting equations it
may ®rst be observed that by Eq. (51), in case ofperfectly plastic material behaviour, M� 0, thetrue contact pressure again reduces to the hardnessvalue, HB, as was found also for the probabilisticmodels as in Eq. (26) above. On the contrary,however, it is evident from Eq. (51) that in case ofhardening materials, M > 0, the slope of the con-tact area versus loading increases with the load incontrast to the probabilistic case and also regard-ing experimental ®ndings. This being the case,there is, however, an essential anomaly evidentalready in Eq. (48) as the nominal pressure doesnot converge unless the fractal dimensionD < 1� 1=�1�M�. As 1 < D < 2; then for in-stance in the linear case, M� 1, a singularity willresult already at D� 3/2. The same discrepancy
was observed by Majumdar and Bhushan (1991)but was not interrogated further regarding higherfractal dimensions. Majumdar and Bhushan(1990) found though in their experiments with twomagnetic tapes the fractal dimensions to beD� 1.33 and D� 1.38, respectively. Brie¯y it maybe concluded that the present analogous quasi-fractal model is too simple to apply in a generalcase but constitutes a challenge to further explorein particular regarding an additional fractal di-mension.
5. Concluding remarks
A consistent theory for initial surface ¯atteningof rough surfaces was laid down with no phe-nomenological assumptions involved but onlybased on material properties and surface topog-raphy. Universal relations between impressiondepth, contact area and loading were ®rst deter-mined for general viscoplastic behaviour of a sin-gle asperity. The results are highly accurate from adetailed ®nite element analysis based on self-simi-larity and stationary contact. In particular resultsobtained for sinking in and piling up at the contactboundary for di�erent materials elucidates a longstanding confusion of volume conservation atimpression.
Probabilistic models for a distribution of as-perity summit heights were used to determinemacroscopic contact behaviour. For perfect plas-ticity the true contact pressure reduces to the or-dinary Brinell hardness irrespective of theroughness topography and impression depth aslong as isotropy prevails. For an exponentialprobability distribution, the relation betweencontact area and loading was also found to belinear irrespective of the material hardeningproperties. For a Gaussian distribution though theslope between the nominal contact pressure andarea was shown to be nonlinear for strain-hard-ening materials. This feature has been known ex-perimentally since long for a wide variety ofdi�erent materials and the predictions of thepresent model were found to be in good agreementwith experimental observations. The validity of the¯attening model was further compared with earlier
40 J. Larsson et al. / Mechanics of Materials 31 (1999) 29±41

testing of carbon steel specimens and the quanti-tative agreement for impression depth, contactarea and loading was quite satisfactory. A quan-titative measure by Johnson (1970) to establishwhen fully plastic ¯ow of a single elastic±plasticasperity is reached combined with a plasticity in-dex to estimate the proportion of plastic asperitycontacts by Greenwood and Williamson (1966)was used to determine the degree of roughnessrequired when inelastic e�ects dominate at ¯at-tening.
A prototype fractal contact model to analysesurface ¯attening was also derived in the samespirit of self-similarity remembering the advan-tages to use scale-independent roughness parame-ters. In case of perfectly plastic materials, the truecontact pressure reduces to that of the Brinellhardness as for the probabilistic model. At hard-ening, though, the slope between the contact areaand the loading was at variance with experimental®ndings and at still higher degrees of hardening theresult did not converge. The simple combinedtheory of asperity heights and contact area was,however, self-a�ne and based only on a singlefractal dimension. To employ the present self-consistent single asperity model and further im-prove on ¯attening theory based on fractal theoryand achieve full consistency constitutes a truechallenge and a worthwhile e�ort.
References
Berry, M.V., Lewis, Z.V., 1980. On the Weierstrass±Mandelbrot
fractal function. Proc. R. Soc. London A 370, 459±484.
Biwa, S., Stor�akers, B., 1995. An analysis of fully plastic Brinell
indentation. J. Mech. Phys. Solids 43, 1303±1333.
Borodich, F.M., Mosolov, A.B., 1992. Fractal roughness in
contact problems. J. Appl. Math. Mech. 56, 681±690.
Carlsson, S., Larsson, P.-L., Biwa, S., 1998. On frictional e�ects
at inelastic contact between spherical bodies.
Chang, W.R., Etsion, I., Bogy, D.B., 1987. An elastic±plastic
model for the contact of rough surfaces. J. Trib. 109, 257±
263.
Elzey, D.M., Wadley, H.N.G., 1993. Modelling the densi®cat-
ion of metal matrix composite monotape. Acta Metall.
Mat. 41, 2297±2316.
Francis, H.A., 1977. Application of spherical indentation
mechanics to reversible and irreversible contact between
rough surfaces. Wear 45, 221±269.
Greenwood, J.A., Williamson, J.B.P., 1966. Contact of
nominally ¯at surfaces. Proc. R. Soc. Lond. A 295,
300±319.
Greenwood, J.A., Tripp, J.H., 1971. The contact of two
nominally ¯at rough surfaces. Proc. Inst. Mech. Eng.
185, 625±633.
Halling, J., Nuri, K.A., 1974. Contact of rough surfaces of
work-hardening materials. IUTAM Symposium on the
Mechanics of the Contact of Deformable Bodies. Univer-
sity Press, Delft, 330±341.
Hill, R., Stor�akers, B., Zdunek, A., 1989. A theoretical study of
the Brinell hardness test. Proc. R. Soc. Lond. A 423, 301±
330.
Hutchins, I.M., 1992. Tribology; Friction and wear of engi-
neering materials. St. Edmundsbury Press, Cornwall.
Johnson, K.L., 1970. The correlation of indentation experi-
ments. J. Mech. Phys. Solids 18, 115±126.
Johnson, K.L., 1985. Contact Mechanics. Cambridge Univer-
sity Press, Cambridge.
Komvopolous, K., Choi, D.-H., 1992. Elastic ®nite element
analysis of multi-asperity contacts. J. Trib. 114, 823±831.
Kucharski, S., Klimczak, T., Polijaniuk, A., Kaczmarek, J.,
1994. Finite-elements model for the contact of rough
surfaces. Wear 177, 1±13.
Kucharski, S., 1997. Private communication.
Majumdar, A., Bhushan, B., 1990. Role of fractal geometry in
roughness characterization and contact mechanics of
surfaces. J. Trib. 112, 205±216.
Majumdar, A., Bhushan, B., 1991. Fractal model of elastic±
plastic contact between rough surfaces. J. Trib. 113, 1±11.
Mandelbrot, B.B., 1975. Stochastic models for the earth's relief,
the shape and the fractal dimension of coastlines, and the
number-area rule for islands. Proc. Nat. Acad. Sci. 72,
3825±3838.
Mandelbrot, B.B., 1982. The fractal geometry of nature.
Freeman, New York.
Stor�akers, B., Larsson, P.-L., 1994. On Brinell and Boussinesq
indentation of creeping solids. J. Mech. Phys. Solids 42,
307±332.
Stor�akers, B., Biwa, S., Larsson, P.-L., 1997. Similarity analysis
of inelastic contact. Int. J. Solids Structures 34, 3061±3083.
Stor�akers, B., 1997. Local contact behaviour of viscoplastic
particles. IUTAM Symposium on Mechanics of Granular
and Porous Materials. Kluwer Academic Publishers, Do-
rdrecht, 173±184.
Takahashi, Y., Tanimoto, M., 1995. E�ect of surface asperity
on interfacial contact process controlled by power law
creep±numerical study of viscoplastic adhering process. J.
Eng. Mat. Tech. 117, 330±335.
Uppal, A.H., Probert, S.D., 1973. Mean separation and real
contact area between surfaces pressed together under high
static loads. Wear 23, 39±53.
Warren, T.L., Krajcinovic, D., 1995. Fractal models of elastic-
perfectly plastic contact of rough surfaces based on the
Cantor set. Int. J. Solids Structures 32, 2907±2922.
Woo, K.L., Thomas, T.R., 1980. Contact of rough surfaces: a
review of experimental work. Wear 58, 331±340.
J. Larsson et al. / Mechanics of Materials 31 (1999) 29±41 41