INDUCTION MACHINE DIAGNOSTICS BASED ON FFT … · Zeszyty Problemowe – Maszyny Elektryczne Nr...
6
Zeszyty Problemowe – Maszyny Elektryczne Nr 93/2011 1 Jan Rusek AGH University of Science and Technology, Chair of Electrical Machines INDUCTION MACHINE DIAGNOSTICS BASED ON FFT ANALYSIS OF CURRENT SPACE VECTOR Abstract: FFT analysis of one of the stator currents has become a standard procedure for diagnosing the state of an induction machine. In this procedure the harmonics are all as if positive. However, if the stator currents are aggregated to a space vector, a direction of rotation of complex harmonics is determinable. The sign of a harmonic conveys additional information, important for diagnostic purposses. The paper presents analyses of calculated currents, based on an FFT algorithm for two currents. As, typically, a machine is fed through three cables, two currents are sufficient to establish a space vector of stator currents. The space vector is a complex quantity which can be put into an FFT analysis. A developed software is fitted with graphical interface. Unlike traditional display, separate amplitudes of harmonics are displayed above and below a horizontal frequency axis. The harmonics rotating in positive direction are displayed above, and the others below the frequency axis. The software automatically indicates zones where the slot harmonics are expected. The algorithm for this is based on a specific harmonic balance model. Based on the frequency of a slot harmonic, the rotor speed is determined. Preliminary analyses are uncluded. 1. Introduction The so called Current Signature Analysis [1], based on analysis of one current, has now become a standard in motor diagnostics. However, the current harmonics are deprived of one of a very important attribute: they are sign agnostic, i.e. they are always as if positive. But if all stator currents are considered, and if they are aggregated to a space vector, being a complex quantity, the direction of rotation of a complex harmonic can be determined. That could be of some importance for proper diagnosis in more complex cases, met in real industrial diagnoses. The paper presents a software accomplishing an FFT algorithm for two currents. As, typically, a machine is fed through three cables, without neutral, two currents allow establishing a space vector of stator currents. This complex quantity undergoes FFT analysis, always carried out in a complex domain. The software was developed in one of the contemporary programming environments, in a C# language. The developed software Sp2ph is fitted with a graphical interface. Unlike traditional display, separate amplitudes of the harmonics are displayed above and below the horizontal frequency axis. The harmonics rotating in positive direction are displayed above, and the others below the x axis. The software automatically indicates zones where slot harmonics are to be looked for. This was accomplished via making use of a specific form of the harmonic balance model. The paper contains preliminary examples of applications of the developed software. 2. Space vector of stator currents If instant currents, flowing through stator phas- es, are i 1 , i 2 , i 3 , then the space vector is ௌ ൌ ଶ ଷ ൫ ଵ ଶ ଶ ଷሻ ൯ (1) where a = exp(j2π/3). For a typical three-phase supply, without neu- tral conductor, the sum of all three currents vanish. Hence ଷ ൌ െሺ ଵ ଶ ሻ (2) Recognizing (2) in (1) the real and imaginary parts of a space vector are: ௌ,ோ ൌ ଵ (3) ௌ,ூ ൌ ሺ ଵ 2 ଶ ሻ/√3 (4) As input currents i 1 and i 2 are sequences of samples, taken at the same time instants, also the real and imaginary parts (3) and (4) are sequences of, say, N samples. In accordance with Shanon’s theorem, the sampling apparatus must include an anti-aliasing filter rejecting harmonics of orders higher or equal to N/2. The FFT algorithm requires that the number of samples N is a power of two. It can be taken e.g. from [2]. As, generally, N samples do not cover exactly an integer number of periods of currents, current samples must be multiplied by e.g. Hann window function. The FFT algorithm transforms N samples (3) and (4) into N com- plex numbers. In the case of classical Current Signature Analysis, based on a single current, the components resulting from the FFT algo-
Transcript of INDUCTION MACHINE DIAGNOSTICS BASED ON FFT … · Zeszyty Problemowe – Maszyny Elektryczne Nr...

Zeszyty Problemowe – Maszyny Elektryczne Nr 93/2011 1
Jan Rusek AGH University of Science and Technology, Chair of Electrical Machines
INDUCTION MACHINE DIAGNOSTICS BASED ON FFT ANALYSIS OF CURRENT SPACE VECTOR
Abstract: FFT analysis of one of the stator currents has become a standard procedure for diagnosing the state of an induction machine. In this procedure the harmonics are all as if positive. However, if the stator currents are aggregated to a space vector, a direction of rotation of complex harmonics is determinable. The sign of a harmonic conveys additional information, important for diagnostic purposses. The paper presents analyses of calculated currents, based on an FFT algorithm for two currents. As, typically, a machine is fed through three cables, two currents are sufficient to establish a space vector of stator currents. The space vector is a complex quantity which can be put into an FFT analysis. A developed software is fitted with graphical interface. Unlike traditional display, separate amplitudes of harmonics are displayed above and below a horizontal frequency axis. The harmonics rotating in positive direction are displayed above, and the others below the frequency axis. The software automatically indicates zones where the slot harmonics are expected. The algorithm for this is based on a specific harmonic balance model. Based on the frequency of a slot harmonic, the rotor speed is determined. Preliminary analyses are uncluded. 1. Introduction
The so called Current Signature Analysis [1], based on analysis of one current, has now become a standard in motor diagnostics. However, the current harmonics are deprived of one of a very important attribute: they are sign agnostic, i.e. they are always as if positive. But if all stator currents are considered, and if they are aggregated to a space vector, being a complex quantity, the direction of rotation of a complex harmonic can be determined. That could be of some importance for proper diagnosis in more complex cases, met in real industrial diagnoses. The paper presents a software accomplishing an FFT algorithm for two currents. As, typically, a machine is fed through three cables, without neutral, two currents allow establishing a space vector of stator currents. This complex quantity undergoes FFT analysis, always carried out in a complex domain. The software was developed in one of the contemporary programming environments, in a C# language. The developed software Sp2ph is fitted with a graphical interface. Unlike traditional display, separate amplitudes of the harmonics are displayed above and below the horizontal frequency axis. The harmonics rotating in positive direction are displayed above, and the others below the x axis. The software automatically indicates zones where slot harmonics are to be looked for. This was accomplished via making use of a specific form of the harmonic balance model. The paper contains preliminary examples of applications of the developed software.
2. Space vector of stator currents
If instant currents, flowing through stator phas-es, are i1, i2, i3, then the space vector is
(1)
where a = exp(j2π/3).
For a typical three-phase supply, without neu-tral conductor, the sum of all three currents vanish. Hence
(2)
Recognizing (2) in (1) the real and imaginary parts of a space vector are:
, (3)
, 2 /√3 (4)
As input currents i1 and i2 are sequences of samples, taken at the same time instants, also the real and imaginary parts (3) and (4) are sequences of, say, N samples. In accordance with Shanon’s theorem, the sampling apparatus must include an anti-aliasing filter rejecting harmonics of orders higher or equal to N/2. The FFT algorithm requires that the number of samples N is a power of two. It can be taken e.g. from [2]. As, generally, N samples do not cover exactly an integer number of periods of currents, current samples must be multiplied by e.g. Hann window function. The FFT algorithm transforms N samples (3) and (4) into N com-plex numbers. In the case of classical Current Signature Analysis, based on a single current, the components resulting from the FFT algo-

Zeszyty Problemowe – Maszyny Elektryczne Nr 93/2011 2
rithm, the order of which is higher than N/2, are complex conjugate to appropriate harmonics of orders lower than N/2. Hence, they do not con-vey any new information. This, however, is no longer the case if the input signal is complex, as is a space vector in (1). In fact a harmonic of the order of N-µ (after FFT analysis) rotates with exactly the same speed as does the har-monic of the order µ, except that it rotates in opposite direction. If the sequence of input cur-rents i1 and i2 is such that i1 leads i2, then the fundamental harmonic rotates forward. If it is not the case, current i2 should be considered as i1 and vice versa. Such obvious change is in-cluded in the developed software, used in the analyses further down.
3. Harmonic balance model
Application of a harmonic balance model [3] for direct calculation of amplitudes of separate harmonics, though possible [4], is not practical, mainly due to the fact that strict constancy of rotor speed leads to overestimation of the am-plitudes of calculated harmonics. It, however, can constitute a starting point for deriving a specific harmonic balance model [1,5]. The assumptions for the latter one are:
the three-phase stator winding is sym-metrical, without parallel branches,
the air-gap is uniform: there is neither static nor dynamic eccentricity,
the slot dents are of no meaning, the cage is symmetric, the iron is of infinitely high permeance, the shaft flux vanish.
Despite that none of the machines fulfills these rather strong assumptions, the model proved to be very fruitful in diagnosing even big power machines run in the industry [6]. It allows to foresee the value of the so called main slot harmonic index mShi, also referred to as a parameter h, indicating a zone where the main slot harmonic is to be looked for. The specific harmonic balance model also allows establishing of the so called sequence index Si, also referred to as a category, indi-cating the sequence of symmetrical compo-nents of higher harmonics. Both, the mShi and Si indexes result from one, rather simple, equation (5), derived in [1] and [5], with p meaning the number of pole-pairs and Nr the number of rotor slots.
102
3 (5)
Equation (5) is to be understood in a following manner. One looks for the smallest natural number h fulfilling (5) for either 1, or 0, or 2 from the curly brackets. This value of h coin-cides with the value of the mShi index. If the above fulfillment takes place for 1, from the curly brackets, the sequence index Si = 012, if for 0 the Si = 111, and if for 2 the Si = 210.
For Si = 012 the sequence of symmetrical com-ponents of stator current higher harmonics, in equations of the specific harmonic balance model, is:
,
,
,
(6)
For Si= 111 this sequence is:
,
,
,
(7)
For Si= 210 this sequence is:
,
,
,
(8)
In (6) to (8), out of an infinite number of sym-metrical components of higher harmonics, only the three central ones are explicitly exposed. The superscripts are indexes of symmetrical components. The subscripts determine the speed of rotation of separate symmetrical com-ponents, of higher harmonics. For example, the subscript 1,hNr in (6) determines the angular speed ωh of rotation of a complex higher har-monic:
1 (9)
where
ωe = 2πfL, fL = 50 Hz, is a power supply fre-quency,
Ωm – is a mechanical speed, in rad/s.
Formulas (6) to (8) determine the layout of a specific harmonic balance model. However, for further analysis, of importance are the fol-lowing notes:

Given diagnoasymm
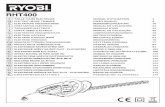
Fig. 1.pensio
The staeach plishedbranchare taked for the airmagnitnominvolts w50 Hz higher ply coto contrum, marked
The top a(6) to (8) harmonicstermined bIf a top or to a zero orponent, it mtral conduconly one mThe distanof speeds is 2fL, if boIf, as a resular frequenis known, ing a mech
fL and Ωm, ostic compometry, are [7]
Stator curreon of the roto
ator windingphase. The d with accohes. In next pken into acco
only througr-gap length tude of the al currents. was assumed
harmonic pr harmonics. nditions the
nstitute a negthe fundam
d with bigg
Zesz
and the bottoconstitute p. They occur
by mShi = h. a bottom har
r homo-polar must vanish, ctor. Hence, in
main slot harmnce betweenof both mai
oth exist. ult of FFT anncy ωh, of aequation (9)
hanical speed
the frequenonents, acco]:
ents and specor.
g had two pacalculation
unt for slotparagraphs aount. Saturatgh fictitious (thickness),
supply curThe supply
d to consist plus third, fTo depict tyfifth harmo
gative sequemental 50 H
ger square an
zyty Problemow
om harmonipairs of mainr in slot zone rmonic contrisymmetrical if there is non cases (6) an
monic remainsn absolute vin slot harm
nalysis, the agiven harmallows deter
d Ωm.
ncies of theompanying
ctrum of a cu
arallel branchns were acting and paalso eccentrition was accmagnificatiodepending orrents, relate
voltage of of a fundamfifth and sevypical powernic was assunce. In the
Hz harmonind the main
we – Maszyny E
ics in n slot es de-
ibutes com-
o neu-nd (8) .
values monics
angu-monic,
rmin-
e two cage
,
wh
Fowaof forme
4.
Figsparefnuthe
urrent space
hes in ccom-arallel cities ount-on of
on the ed to 1000
mental venth r sup-umed spec-ic is n slot
harenstaThexttimis harbythianslobasismo
Elektryczne Nr 9
1 ∓ 2
here the slip
ormula (10) are to gener
the diagnor cage asymetry is not a
Centric su
g. 1 shows ace vector. fers to a 132
umber of state rotor was N
vector for st
rmonic withcompass bo
ate. The starthe long enoutinguishing
me interval oplotted in brmonic is 1
y a downwardis bar resultce model. T
ot harmonic, lance model
s of a curreodel, the slo
93/2011
2
s is:
/
is used in ate a hint fo
ostic componmmetry. Hosubject of p
spension of
a spectrum It, as well
2 kW cage itor slots was
Nr = 56.
teady-state in
smaller squoth the startt up interval gh steady staof all transieof currents, rbold. Frequen1433 Hz. Itsd directed brs from a sp
The negative foreseen by
, is confirment space ve
ot harmonic
the developfor potential nents, chara
owever, cagpresent contr
f rotor
of stator aas all other
induction mos Ns = 72 an
nterval. Cen
uare. The calt up and thl is here meaate interval gent componereally FFT ancy of the ms location is road bar. Lo
pecific harmrotation of
y a specific hed by the FFector. Thank
was not mi
3
(10)
(11)
ped soft-location
acteristic ge asym-ribution.
currents r figures, otor. The nd that of
tric sus-
lculations he steady aningless. guarantee ents. The analyzed, main slot indicated
ocation of onic bal-the main harmonic FT analy-ks to this ixed with

4
the onsent in
5. Sta
Fig. 2 tor for a staticair-gapharmonto the
Fig. 2.tricity
6. Dyn
Fig. 3 for a mof the ics chdisplaylack o99.33 H
Fig. 3.eccent
ne of the freqn Fig. 1.
atic eccentr
shows a sper a motor the c eccentricitp length (thinics already top rim of t
Stator curreof 90% of ai
namic ecce
shows a cumotor with dgeometricalaracteristic fyed lower thof eccentricHz and 138
Stator curretricity of 90%
Zesz
quency of 15
icity
ectrum of a c rotor of whity of 90% ofckness). In tpresent in F
the spectral f
ents and specir-gap.
entricity
urrent space dynamic ecc air-gap lengfor dynamichan those alcity. Their 83 Hz. The
ents and spec% of air-gap.
zyty Problemow
534 Hz, also
current spaceich is afflictef the geomethe spectrum
Fig. 1, are flufield. A new
ctrum of a cu
vector speccentricity of gth. The harmc eccentricityready presenfrequenciesformer valu
ctrum of a cu
we – Maszyny E
o pre-
e vec-ed by
etrical m, the ushed
w har-
moconsubcowatioseethecur
urrent space
ctrum 90%
rmon-y are nt by s are ue is
onquanprereaanrot
urrent space
Elektryczne Nr 9
onic, of the nspicuously bzone of thmpassing leas discussedon, for staticen in [6]. Itse parallel brrrents.
vector for st
nly an approuency resolutalyzed timeesence of thady reportedalysis reveatates in negat
vector for st
93/2011
frequency olower. It is
e main slot ft and right in the third
c eccentricitys amplitude iranches allo
teady-state in
ximation of tion, due to t
interval, ishe 100 Hzd in [8]. Thealed that thetive direction
teady-state in
of 1333 Hz, s located in
harmonic zt slot subzond paragraph. y, was alreais rather smaowing for e
nterval. Stati
f 100 Hz, the length ofs about 0.5 z componente here presene 100 Hz con.
nterval. Dyn
is shown n the left zone, en-nes, as it Its loca-
ady fore-all due to qualizing
ic eccen-
as a fre-f the FFT Hz. The
t was al-nted FFT omponent
amic

7. Mix
Fig. 4 tor for both thof 45(thickna harmty. Acfalls beArounthe soSimilaaroundare 251409
rotatiocies dipressedfrequenpair otion. Hrange
Fig. 4.centric
8. Inte
Fig. 5 face oelementhe inpthe twinformified nples.
xed eccentr
shows a sper a motor the he static and% of the
ness). The lemonic characctually, the elow the accd a fundame
o called rotaar pair of rod a main slot.18 Hz and 79 Hz and
onal harmoniiffer by a rod in revoluncy of the hf rotational
Here, both iand in the s
Stator currecity: static ec
erface of Sp
shows a scrof the devents of the intput paramete
wo-current bamation displaname of the The second
Zesz
ricity: stati
ectrum of a c rotor of whi
d dynamic ecgeometrical
eft subzone teristic for aamplitude o
counted for lental 50 Hz hational harm
otational hart harmonic. T74.62 Hz in t1458 Hz in ics are thosetational spee
utions per seharmonic giharmonics
n the fundalot harmonic
ents and specccentricity of
p2ph
reenshot withloped softwterface allowers indispensased FFT anayed in the to
file containd strip con
zyty Problemow
ic + dynam
current spaceich is afflicteccentricities, l air-gap ledoes not co
a static eccenof this harmlimit of 90harmonic a pamonics appermonics appeTheir frequethe first casethe second.
e whose freqed of a rotorecond) fromving raise tounder consi
amental harmc range, only
ctrum of a cuf 45%, plus d
h graphical iware Sp2ph. w to recognizsable to carrynalysis. The op strip is a
ning current ntains the v
we – Maszyny E
ic
e vec-ed by both ength
ontain ntrici-monic dBs. air of
eared. eared
encies e, and . The quen-r (ex-
m the o the idera-monic y one
parer,tiothacorotin eccHoto nostaminewrotthecattricmosomtio
urrent space dynamic ecce
inter-The
ze all ry out main qual-sam-value
edzerplethacucocoslothe
Elektryczne Nr 9
re of rotation, there are caonal harmoniat the directiincide with ttational harmFig. 4 dimi
centricity is owever, the ma mixed ec
ot just a supeatic and soixed eccentrw harmonictational harme static and dtive, and notcities vanishonics, if, of cme other ph
on [6].
vector for stentricity of 4
65536 bfor FFT an
ro-based indes. The sepaat the columrrent i1, leantains a quantaining num
ots, of varioe 45/132 kW
93/2011
nal harmonicases where alics can occuon of rotatiothat of a harmmonics. The nished its vanow smalle
most charactcentricity iserposition oflo dynamic
ricity is acccs, that is bmonics. Hendynamic eccet additive. Ifh, vanish alscourse, they enomenon, s
teady-state in45%, of air-g
eing the numalysis. A sepdex of a coluarate values n of index 1
ading currenalified namembers of pous machines
W have been s
cs is presentlso higher or
ur [6]. To beon of these hrmonic givinge 100 Hz halue, as the
er than that iteristic thing s that its spef the spectrac eccentricitcompanied bby the just dnce, the behentricities is f one of thesso all rotatioare not gene
such as torqu
nterval. Mixegap.
mber sampleparate valuelumn with ti
of 1 and 21 contains sant i2. The the of a datab
ole pairs ands, of which selected.
5
. Howev-rder rota-
e noted is harmonics g raise to harmonic dynamic
in Fig. 3. referring
ectrum is a for solo ties. The by totally discussed havior of multipli-
se eccen-onal har-erated by ue pulsa-
ed ec-
es select-of 0 is a
ime sam-2 indicate amples of hird strip base file, d of rotor
the one,

6
Fig. 5
9. Con
Threthpl
Spamha
10. Bi[1] Rusin currArchiv Numbe
[2] Zielrzania 2002
[3] SobmaszynG. i. H.
[4] Rusasynchrlonej. P
[5] Rustorque tional JElectricNumbe
5. Interface of
nclusions
he proposedents space vehe direction lex, higher hpecific harmmbiguity byarmonic is th
ibliographysek, J.: Categrent signature
fuer Elektroter 5, Decembe
liński, T.: Odsygnałów. W
bczyk, T.: Ann elektrycznyc. z. 97, Kraków
sek. J.: Momronicznego kl
Praca doktorsk
sek J.: Categof induction mJournal for Ccal and Electer 2, 2003, pp.
Zesz
of the develop
d FFT analysector deliverof rotation
harmonics. monic balancy decision mhe slot one.
y gorization of i
analysis Electechnik, Heideer 2002, pp. 26
d teorii do cyWydział EAIi
naliza procesh. ZN AGH, w 1977
ment elektromlatkowego w ka, AGH, Kra
gory, slot hamachines COMomputation atronic Engine. 388- 409
zyty Problemow
ped software
is of a statorrs informatioof separate
e model remmaking on w
induction macctrical Engineelberg, Volum65-273
yfrowego prziE AGH, Kra
sów stacjonanr 654, El. i M
echaniczny sstanie pracy ków, 1978
armonics andMPEL The Intnd Mathematering. Volum
we – Maszyny E
e Sp2ph for F
r cur-on on com-
moves which
chines eering, me 84,
zetwa-aków,
arnych Mech.
silnika usta-
d the terna-tics in
me 22,
[6]cluinster
[7]indIEEMaSDpp
[8]intducnew14
AcAG
AuProogy30-kr.e
Re
Pr
Elektryczne Nr 9
FFT based di
] Elawgali S.: utch wobblingspection of spred currents. D
] Stefani A., Fduction machEE Int. Sympachines, Po
DEMPED 200.126-131
] Rusek J.: Dter-harmonicsction machinwable Energyof March, 20
knowledgemeGH-UST Statu
uthor of. Jan Rusek, Ay, Chair of Ele-059 Krakow, edu.pl.
eviewer
rof. dr hab. in
93/2011
iagnostics of
Diagnosing ofof the inducti
ectrums of theDissertation, A
Filippetti F., Bines in time-posium on Dower Electr07, Cracow,
Diagnostic infoof a direct a
e. Internationy and Power Q08, Proc. pp.1
nt: The workte Work numb
AGH Universityectrical MachinPoland, (48) 1
nż. Marian P
f induction m
of rotor eccenttion machines,e calculated a
AGH, Kraków
Bellini A.: Dia-varying cond
Diagnostics foronics and September 6
formation conand PWM supnal ConferencQuality. Santa103-104
k was supportber 11.11.120
y of Science annes, Al. Micki12 6341096,ger
Pasko
machines.
tricity and , based on and regis-
w, 2007
agnosis of ditions 6th or Electric
Drives, 6-8, Proc.
ntained in upplied in-ce on Re-ander, 12-
ted by the .873.
nd Technol-iewicza 30, rusek@cyf-