
In Copyright - Non-Commercial Use Permitted Rights ...374/eth-3… · Abstract This thesis is...
139
Research Collection Doctoral Thesis Sparse finite elements for radiative transfer Author(s): Widmer, Gisela Publication Date: 2009 Permanent Link: https://doi.org/10.3929/ethz-a-005916456 Rights / License: In Copyright - Non-Commercial Use Permitted This page was generated automatically upon download from the ETH Zurich Research Collection . For more information please consult the Terms of use . ETH Library
Transcript of In Copyright - Non-Commercial Use Permitted Rights ...374/eth-3… · Abstract This thesis is...

Research Collection
Doctoral Thesis
Sparse finite elements for radiative transfer
Author(s): Widmer, Gisela
Publication Date: 2009
Permanent Link: https://doi.org/10.3929/ethz-a-005916456
Rights / License: In Copyright - Non-Commercial Use Permitted
This page was generated automatically upon download from the ETH Zurich Research Collection. For moreinformation please consult the Terms of use.
ETH Library

Diss. ETH No. 18420
Sparse Finite Elements for Radiative Transfer
A dissertation submitted to
ETH ZURICH
for the degree of
Doctor of Sciences
presented by
GISELA WIDMER
Dipl. Rech. Wiss. ETH Zurich
born June 16, 1978
citizen of Schonenwerd and Safenwil, Switzerland
accepted on the recommendation of
Prof. Dr. R. Hiptmair, examiner
Prof. Dr. Ch. Schwab, co-examiner
Prof. Dr. S. Rjasanow, co-examiner
2009


’
Dank
Diese Doktorarbeit ist wahrend meiner Assistenzzeit am Seminar fur Angewandte Mathematikund in Zusammenarbeit mit dem ABB-Forschungszentrum in Baden entstanden.
An erster Stelle mochte ich meinem Betreuer Prof. Dr. Ralf Hiptmair fur seine Un-terstutzung, sein reges Interesse an meiner Arbeit und die grosse Freiheit, die ich wahrendmeiner Dissertation geniessen durfte, bedanken.
Ein grosser Dank gebuhrt auch meinen Koreferenten Prof. Dr. Christoph Schwab und Prof.Dr. Sergej Rjasanow. Als Kobetreuer meiner Arbeit hat Prof. Schwab mit seinem grossenFachwissen uber Dunngittermethoden viel zum Erfolg meiner Dissertation beigetragen.
Danken mochte ich auch dem Team von Dr. Henrik Nordborg und Dr. Jorg Ostrowski amABB-Forschungszentrum in Dattwil, insbesondere Arthouros Iordanidis fur die wissenschaftlichenGesprache uber Strahlungstransport in Hochspannungsunterbrechern.
Fur die guten Ratschlage bei der Implementierung bedanke ich mich bei meinem Burokol-legen Dr. Kersten Schmidt. Ein grosses Dankeschon gilt auch Dr. Andreas Ruegg, HolgerHeumann, Dr. Vasile Gradinaru, Wang Wei und Liang Haixia, welche mit mir an der ETHoder an der Chinese University in Hong Kong das Buro geteilt haben und mir viele interessanteGesprache ermoglicht haben.
Ganz besonders bedanke ich mich bei meinem Freund Douglas, welcher mich wahrend dergesamten Dissertationszeit immer ermuntert und unterstutzt hat.
Schliesslich mochte ich mich auch bei Prof. Dr. Rolf Jeltsch und allen, welche wahrendmeiner Dissertationszeit am SAM gearbeitet haben, fur ihre Unterstutzung und die interessanteZeit bedanken.
Zurich, im Mai 2009 Gisela Widmer
i

ii

Contents
I Theory 1
1 Introduction 3
1.1 Radiative Transfer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.1.1 The Radiative Transfer Equation . . . . . . . . . . . . . . . . . . . . . . . 3
1.1.2 Net Emission, Heat Flux and Incident Radiation . . . . . . . . . . . . . . 5
1.1.3 Standard Discretization Methods for the Radiative Transfer Equation . . 5
1.2 Sparse Grids . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.2.1 Sparse Grids for Radiative Transfer . . . . . . . . . . . . . . . . . . . . . 6
2 Sparse Tensor Product Discretization 7
2.1 Weighted Least-Squares Variational Formulation . . . . . . . . . . . . . . . . . . 8
2.2 Galerkin Discretization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.3 Sparse Tensor Product Spaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.3.1 Sparse Tensor Product Space without Boundary Conditions . . . . . . . . 13
2.3.2 Sparse Tensor Product Space with zero Inflow Boundary Conditions . . . 17
2.4 Graded Sparse Tensor Product Space . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.4.1 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.4.2 Number of Degrees of Freedom . . . . . . . . . . . . . . . . . . . . . . . . 25
2.4.3 Approximation Properties . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3 Adaptivity 63
3.1 Best N-term Approximation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
3.2 Adaptive Sparse Tensor Product Space . . . . . . . . . . . . . . . . . . . . . . . . 64
3.2.1 Parent-Child Relationship in the Single Spaces . . . . . . . . . . . . . . . 64
3.2.2 Parent-Child Relationship in the Product Space . . . . . . . . . . . . . . 65
3.2.3 Definition of Adaptive Sparse Tensor Product Spaces . . . . . . . . . . . . 66
3.2.4 Construction of an Adaptive Sparse Tensor Product Space . . . . . . . . . 67
3.2.5 Level Refinement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
II Algorithms and Implementation 69
4 Program Overview 71
4.1 Program Input . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
4.2 Setup of the Meshes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
4.3 Setup of the Sparse Tensor Product Space . . . . . . . . . . . . . . . . . . . . . . 73
4.4 Setup of Stiffness Matrix and Right Hand Side . . . . . . . . . . . . . . . . . . . 73
4.5 Solving the Linear System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
4.6 Update of the Adaptive Sparse Tensor Product Space . . . . . . . . . . . . . . . 73
4.7 Postprocessing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
iii

5 Construction of the Sparse Tensor Product Space 755.1 Iterative Space Construction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 755.2 Refinement of a Product Basis Function . . . . . . . . . . . . . . . . . . . . . . . 785.3 Space Data Structures and Iterators . . . . . . . . . . . . . . . . . . . . . . . . . 815.4 Construction of the Graded Sparse Tensor Product Space . . . . . . . . . . . . . 81
6 Solver 836.1 Matrix-Vector Multiplication . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
6.1.1 Matrix-Vector Multiplication for Sparse Grids . . . . . . . . . . . . . . . . 846.1.2 Matrix-Vector Multiplication for the Sparse Tensor Product Space . . . . 876.1.3 Matrix-Vector Multiplication for the Adaptive Sparse Tensor Product Space 91
6.2 Preconditioning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 916.2.1 Multiplicative Subspace Preconditioner for the Sparse Tensor Product Space 92
III Numerical Experiments 97
7 Sparse Tensor Product Approximation 997.1 Test Problems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
7.1.1 Test Problem 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 997.1.2 Test Problem 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1007.1.3 Test Problem 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1007.1.4 Test Problem 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
7.2 Efficiency of the Discretization . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1017.2.1 Number of Degrees of Freedom . . . . . . . . . . . . . . . . . . . . . . . . 1017.2.2 Incident Radiation and Net Emission . . . . . . . . . . . . . . . . . . . . . 102
7.3 Multiplicative Subspace Preconditioner . . . . . . . . . . . . . . . . . . . . . . . . 107
8 Adaptive Approximation 1118.1 Test Problems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
8.1.1 Test Problem 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1118.1.2 Test Problem 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
8.2 Adaptively Refined Meshes in Physical Space . . . . . . . . . . . . . . . . . . . . 1128.3 Efficiency of the Adaptive Refinement . . . . . . . . . . . . . . . . . . . . . . . . 114
List of Symbols 119
Bibliography 123
Curriculum Vitae 127
iv

Zusammenfassung
Diese Doktorarbeit befasst sich mit der Diskretisierung der stationaren monochromatischenStrahlentransportgleichung in absorbierenden und emittierenden Medien mit absorbierendenRandbedingungen, sowie mit der Entwicklung und Implementierung von effizienten Losungsver-fahren.
Strahlentransport ist von grosser Bedeutung bei Hochtemperaturanwendungen wie z.B. derSimulation von Lichtbogen in Hochspannungsunterbrechern. Obwohl die betrachtete Gleichungfur jede feste Strahlungsrichtung eine einfache Transportgleichung darstellt, ist das effizienteLosen der Gleichung eine grosse Herausforderung, da es sich wegen der Richtungsabhangigkeitder Strahlungsintensitat um ein hochdimensionales Problem handelt und der Rechenaufwandim Verhaltnis zur Genauigkeit der Losung bei der Verwendung von Standardverfahren, wie zumBeispiel der Methode der diskreten Ordinaten, sehr stark anwachst. Das Hauptaugenmerk derArbeit liegt deshalb auf der Entwicklung von Diskretisierungstrategien und Losungsverfahren,welche die Komplexitat der Raumwinkeldiskretisierung kompensieren, ohne zu wesentlichen Ein-bussen bei der Genauigkeit der Losung zu fuhren.
Um die Komplexitat der Diskretisierung zu reduzieren, verwenden wir eine fur den Strah-lentransport angepasste Dunngittermethode, welche auf dem Produkt des zwei- oder dreidimen-sionalen Gebietes, sowie des zweidimensionalen Raumwinkels basiert. Dies ermoglicht es, dieAnzahl Freiheitsgrade soweit zu reduzieren, dass sie fast proportional zu einer rein ortlichenDiskretisierung ist.
Spezielle Aufmerksamkeit muss den Randbedingungen geschenkt werden. Da es sich umein Transportproblem handelt und die Randbedingungen an einem Ortsgitterpunkt richtungs-abhangig sind, versagen Standarddunngittermethoden in der Nahe des Randes. Obwohl dieRandapproximationseigenschaften der Diskretisierung fur Hochspannungsunterbrecher nur eineuntergeordnete Rolle spielen, prasentieren wir eine zum Rand hin verfeinerte Diskretisierung- den gradierten Dunngitterraum. Wir beweisen, dass diese Diskretisierung fur zweidimensio-nale Gebiete die Approximationsrate von Standarddunngitterdiskretisierungen in einer etwasschwacheren Norm garantiert, wobei die Anzahl Freiheitsgrade nur um einen logarithmischenFaktor erhoht werden muss.
Ein wichtiger Teil der Arbeit besteht in der Implementierung von Algorithmen, mit welchendie Strahlungsintensitat mit einem Rechenaufwand, welcher proportional ist zu der Anzahl ver-wendeter Freiheitsgrade im Dunngitterraum, berechnet werden kann. Dies ist moglich dank derAnwendung eines iterativen Losungsverfahrens mit einem effizienten multiplikativen Unterraum-vorkonditionierer.
Da bei Strahlungsproblemen oft Unstetigkeiten oder grosse Gradienten in der Losung vor-kommen - insbesondere bei Hochspannungsunterbrechern aufgrund der grossen Temperaturgra-dienten - kann die Anzahl Freiheitsgrade in der Diskretisierung im Vergleich zur Dunngitterdis-kretisierung in vielen Fallen nochmals wesentlich reduziert werden. Dieser Ansatz liegt deradaptiven Dunngitterdiskretisierung zugrunde, bei welcher in einem iterativen Verfahren einUnterraum des Dunngitterraums aufgebaut wird. Vor allem fur Probleme mit isolierten Strah-lungsquellen in stark absorbierendem Medium kann die Anzahl Freiheitsgrade auf diese Weisestark reduziert werden, ohne wesentlich an Genauigkeit einzubussen.
v

vi

Abstract
This thesis is concerned with the discretization of the stationary monochromatic radiative trans-fer equation in absorbing and emitting media with fully absorbing walls, as well as the develop-ment and implementation of efficient solution strategies.
Radiative transfer is a very important mode of energy transfer in high temperature applica-tions such as the simulation of light arcs in high-voltage circuit breakers. Although the equationunder consideration is for any fixed direction of radiation a simple transport equation, solv-ing the equation efficiently is very challenging, as the problem is high-dimensional due to thedirection-dependency of the radiative intensity. This leads to very high computational costs toobtain accurate solutions when standard discretizations, such as discrete ordinates, are used.The work therefore mainly focuses on developing discretization strategies and solution meth-ods that compensate for the complexity of the solid angle discretization without compromisingaccuracy.
In order to reduce the complexity of the discretization, we use a sparse grid method thathas been adapted for the radiative transfer equation and that is based on the product of thetwo- or three-dimensional physical domain and the two-dimensional solid angle. This makes itpossible to reduce the number of degrees of freedom such that it is almost proportional to adiscretization in physical space only.
Special care has to be taken with respect to the boundary conditions. As the equation is atransport problem and the boundary conditions at a given point in physical space depend on thedirection, standard sparse grid methods will fail near the boundary. Although approximationproperties of the discretization near the boundary are of minor importance for high-voltagecircuit breaker simulations, we present a discretization that is refined towards the boundary -the graded sparse tensor product space - and prove that this discretization makes it possible toobtain the approximation properties of a standard sparse grid discretization in a slightly weakernorm, while increasing the number of degrees of freedom by a logarithmic factor only.
An important part of the work consists of the implementation of algorithms with which theradiation intensity can be obtained at computational costs that are almost proportional to thenumber of degrees of freedom in the sparse tensor product space. This is possible thanks to aniterative solution process and an efficient multiplicative subspace preconditioner.
As solutions to a radiative transfer problem often have large gradients or even discontinuities -in particular in circuit breaker simulations due to large temperature gradients - the number ofdegrees of freedom in the discretization can often be reduced even further compared to a sparsetensor product discretization. This is the underlying idea of the adaptive sparse tensor productapproximation, when a subspace of the sparse tensor product space is created in an iterativeprocess. In particular for problems with isolated radiating sources in strongly absorbing media,the number of degrees of freedom can be drastically reduced without compromising accuracy.
vii

viii

Part I
Theory
1


Chapter 1
Introduction
1.1 Radiative Transfer
The term radiation or radiative transfer denotes the mode of energy transport that is caused byelectromagnetic waves or photons that travel through space [25]. As radiation depends on theposition x in space, the direction s, the wave frequency ν and time t, it can be described by theseven-dimensional radiation intensity distribution u(x, s, ν, t), which is the radiative energy flowper time, area normal to rays, solid angle and wavelength. According to Stefan Boltzmann’s law,the radiative intensity Ib of a blackbody is proportional to the fourth power of the temperatureT
Ib = σT 4,
where σ is the Boltzmann constant. Therefore, radiation is an important mode of heat transferin applications at high temperatures such as circuit breaker simulations.
The medium through which electromagnetic waves or photons travel is of major importancefor the radiative intensity distribution, as the intensity may be attenuated by absorption, rein-forced by emission or redirected by scattering effects. In contrast to heat transfer by convectionand conduction, radiation can even occur when no medium is present, where the photons travelthrough space without any interactions. The propagation of photons in participating media (andvacuum) is described by the radiative transfer equation, a transient first-order integro-differentialequation for the radiation intensity distribution u(x, s, ν, t).
1.1.1 The Radiative Transfer Equation
The radiative transfer equation describes the propagation of the radiative intensity u(x, s, ν, t)through an emitting, absorbing and scattering medium at position x := (x, y, z)⊤ in a domainD ⊂ R
3, into a solid angle s, at a frequency ν and at time t
(1
c
∂
∂t+ s · ∇x + κ(x, ν, t) + σs(x, ν, t)
)u(x, s, ν, t) = Ku(x, s, ν, t) + q(x, s, ν, t). (1.1)
κ(x, ν, t) ≥ 0 and σs(x, ν, t) ≥ 0 denote the absorption and the scattering coefficient, ∇xu :=(∂u∂x ,
∂u∂y ,
∂u∂z
)⊤the gradient of u with respect to the space coordinates, c the speed of light,
q(x, s, ν, t) the radiative source in the domain and Ku(x, s, ν, t) the scattering operator definedby
Ku(x, s, ν, t) :=σs(x, ν, t)
4π
∫ ∞
0
∫
SΦ(s, s′, ν, ν ′)u(x, s′, ν ′, t) ds′ dν ′.
3

4 1.1. RADIATIVE TRANSFER
Here S denotes the unit sphere in R3 and Φ(s, s′, ν, ν ′) is the scattering kernel, which satisfies∫ ∞
0
∫
SΦ(s, s′, ν, ν ′) ds′ dν ′ = 1.
Assuming fully absorbing walls, the intensity into incoming directions at the boundary has tobe prescribed by
u(x, s, ν, t) = u0(x, s, ν, t), (x, s) ∈ Γ−,
with Γ− being the inflow boundary
Γ− := (x, s) ∈ ∂D × S; n(x) · s ≤ 0.
Here, ∂D is the boundary of the domain D and n(x) the outer unit normal in x to D.In the following, we will make some assumptions that are justified for the application we
have in mind, which is the simulation of a circuit breaker. Firstly, as the speed of light is veryfast compared with other time scales in the simulation, we assume that the radiation adaptsinstantaneously to changes in the temperature distribution and neglect the time derivative
∂
∂tu(x, s, ν, t) = 0.
Secondly, we make assumptions on the radiative properties of the gas, namely that there areno scattering effects
σs(x, ν, t) = 0
and that the emission is independent of the direction and given as the product of the absorptioncoefficient and the blackbody intensity function
q(x, ν, t) = κ(x, ν, t)Ib(T (x), ν).
Thirdly, we neglect back coupling effects with respect to the temperature and state the radiativetransfer equation for a given temperature field. Therefore, we assume the emitting source to begiven.
Fourthly, we make the assumption that the walls are cold
u0(x, s, ν) = 0.
Lastly, we restrict ourselves to a single frequency, assuming that the medium is either gray orthat the equation has already been discretized in the frequency domain.
These assumptions simplify the RTE to
(s · ∇x + κ(x)) u(x, s) = κ(x)Ib(x), (x, s) ∈ D × S (1.2)
u(x, s) = 0 on Γ−. (1.3)
Although radiative transfer problems are always set in three dimensions with S being theunit sphere S2 in R
3, further simplifications can be made by assuming that the problem isinvariant with respect to one space dimension (∂u(x)
∂z = 0). Equations (1.2)-(1.3) then reduce toa two-dimensional problem in space (four dimensions in space and solid angle) and we ignore thethird component of the inner product s·∇xu. This case will be referred to as the (d1, d2) = (2, 2)case, where d1 denotes the dimension in space and d2 the dimension in solid angle.
(s · ∇x + κ(x)) u(x, s) = κ(x)Ib(x), (x, s) ∈ D × S, D ⊂ R2 (1.4)
u(x, s) = 0 on Γ−. (1.5)

CHAPTER 1. INTRODUCTION 5
1.1.2 Net Emission, Heat Flux and Incident Radiation
In high-temperature applications such as circuit breaker simulations, the radiative transfer equa-tion is coupled to the other equations of interest via the energy equation, where the heat trans-port caused by radiation is added to the other modes of heat transport [25, Chap. 8]. As theeffect of heat transport enters the equation as the divergence of the heat flux, the essentialquantity to compute is the net emission ∇ · q(x), where the heat flux q is the first moment ofthe intensity with respect to solid angle
q(x) =
∫
Su(x, s)s ds.
As
∇ · q(x) =
∫
S∇x · (u(x, s)s) ds =
∫
Ss · ∇xu(x, s) ds
=
∫
S(κ(x)Ib(x)− κ(x)u(x, s)) ds,
the net emission can be computed as the difference between the blackbody emission 4πIb(x) andthe incident radiation G(x), defined by
G(x) =
∫
Su(x, s) ds,
scaled by the absorption coefficient κ(x)
∇ · q(x) = κ(x) (4πIb(x)−G(x)) .
1.1.3 Standard Discretization Methods for the Radiative Transfer Equation
Apart from Monte Carlo schemes, popular methods to solve the radiative transfer problem arethe method of spherical harmonics (in particular the P1-approximation) or the discrete ordinatesmethod. Overviews of numerical methods for radiative transfer can e.g. be found in [25] or [33]and some recent developments in [37].
The method of spherical harmonics is based on a semi-discretization in the solid angle byexpanding the intensity into a truncated series of spherical harmonics, which leads to a coupledsystem of equations in space only. For the P1-approximation, the equations (1.2)-(1.3) boil downto a diffusion equation. The Pn-approximation is only suitable when the intensity function isnear-isotropic, as the approximation rate with respect to the number of spherical harmonics isvery poor for highly non-isotropic functions (cf. [25, Chapt. 15]).
In the discrete ordinates method (often referred to as Sn-approximation), the equation issolved for a fixed number of directions. The method is very popular due to its simplicity, butsuffers from so-called ray effects which require a fine angular resolution if localized emissiveareas are present.
In most applications, the systems of equations arising from a Pn- or an Sn-approximationare solved with finite difference or finite element schemes. In [24], for example, a least-squaresformulation is discretized with spherical harmonics in solid angle and finite elements in space.Kanschat [22] uses a Petrov-Galerkin finite element discretization with piecewise constant func-tions in the solid angle and streamline diffusion stabilization in the physical domain D.

6 1.2. SPARSE GRIDS
1.2 Sparse Grids
Sparse grids are an efficient discretization method to reduce computational costs while main-taining accuracy for high-dimensional problems. First used by Smoljak in 1963 [34] for nu-merical integration and interpolation with trigonometric polynomials, Zenger introduced a newapproach based on a hierarchical basis in 1991 [42]. Since then sparse grids have been usedfor various high-dimensional problems on product domains such as numerical integration [17],the N -electron Schrodinger equation in quantum chemistry [41] or solving partial differentialequations [19, 20, 36].
The approach is based on a one-dimensional multiscale basis from which a higher-dimensionalmultiscale basis is constructed by tensorization. This discretization technique makes it possibleto overcome the so-called curse of dimension [5]: the O(Nd) degrees of freedom of a conventionaldiscretization, where d is the dimension of the problem and N the number of grid points in onedimension, can be reduced to O(N · (logN)d−1) degrees of freedom with essentially no loss ofaccuracy under the condition that the solution is sufficiently smooth. More precisely, the mixedderivatives of the solution have to be bounded [8]. For nonsmooth solutions, adaptive sparsegrids methods have been used that refine the space towards singularities [1, 29, 31].
1.2.1 Sparse Grids for Radiative Transfer
The radiative transfer equation (1.1) is set in seven dimensions with the intensity dependingon time t, a position x in three-dimensional space, a direction s and a frequency ν. Eventhe simplified stationary monochromatic RTE (1.2)-(1.3) with five dimensions or its z-invariantfour-dimensional simplification (1.4)-(1.5) is computationally very expensive and a bottleneckin simulations. As we deal with a d1 + d2-dimensional space, one option would be to use asparse grid approach by tensorization of d1 + d2 one-dimensional subspaces. However, as theapproximation properties of a sparse grid space depend on the mixed second derivatives, thiswould require higher regularity as all mixed derivatives within the d1 + d2-dimensional spacewould have to be bounded, not only derivatives that are mixed w.r.t. space and solid angle.This is a restriction we do not want to impose on our solution, as the hyperbolic character ofthe transport equation does not guarantee high regularity. Therefore, we take into account thatthe radiative transfer equation is in general coupled to other equations via the energy equationand that the overall complexity of the problem scales at least like the number of degrees offreedom of a d1-dimensional discretization. It is therefore sufficient to reduce the complexityof the discretization of the RTE to essentially d1 dimensions. For any shape of domain D,the computational domain D × S is a product domain. The most straightforward option istherefore to adapt the sparse grid discretization to a sparse tensor product discretization ofhigher-dimensional subspaces and to build a sparse tensor product space based on the twosub-domains on D and S.
Another important adaptation is required to strongly impose the boundary conditions. Asthe inflow boundary conditions depend on space as well as solid angle, the space loses its tensorproduct structure. In order to maintain the space hierarchy and the approximation rate at thetransition area between inflow and outflow boundary, we have to make major changes to thespace by using dictionaries of functions instead of bases in the subspaces and refining the spacetowards the transition zone.

Chapter 2
Sparse Tensor Product
Discretization
In this chapter, we describe the discretization of the non-scattering stationary monochromaticradiative transfer equation on a convex, piecewise C2-Lipschitz domain D ⊂ R
n, n = 2, 3, withfully absorbing cold walls:
(s · ∇x + κ(x)) u(x, s) = κ(x)Ib(x) in D × S (2.1)
u(x, s) = 0 on Γ−. (2.2)
In the discussion of the graded sparse tensor product space in section 2.4, we also include thecomplexity and the approximation properties for the (d1, d2) = (2, 1)-case, where the discretiza-tion of the solid angle is restricted to the unit circle S1 .
This chapter is structured as follows: In the first section, we present the least-squares vari-ational formulation, including a theorem that provides existence and uniqueness of the solutionwith respect to an appropriate norm. Section 2.2 contains the Galerkin discretization on theproduct domain D × S. This is followed by section 2.3 that introduces the sparse tensor prod-uct space without boundary conditions and the sparse tensor product space with zero inflowboundary conditions.
When combining the standard sparse tensor product approximation with the restriction ofthe boundary conditions, accuracy near the transition zone between inflow and outflow directionson the boundary of the domain D is lost, even if the solution satisfies the regularity conditionsrequired for a sparse tensor product approach. In section 2.4 we therefore construct a gradedsparse tensor product space with essentially the same number of degrees of freedom by refiningthe space towards the transition zone between inflow and outflow boundary and prove that theapproximation rate with respect to a slightly weaker norm is essentially the same as in a standardsparse tensor product space, where no boundary conditions are imposed. For the time being,the proofs are only completed for the (d1, d2) = (2, 1) and (d1, d2) = (2, 2) cases. However, weexpect the proofs to be extendable to (d1, d2) = (3, 2).
For some problems, the efficiency of the (graded) sparse tensor product discretization canbe improved even further by reducing the number of degrees of freedom using adaptive sparsetensor product spaces. These spaces are defined in chapter 3 and the rather heuristic adaptiverefinement strategies are described in section 3.
7

8 2.1. WEIGHTED LEAST-SQUARES VARIATIONAL FORMULATION
2.1 Weighted Least-Squares Variational Formulation
When regarding s ∈ S as a mere parameter, the radiative transfer equation (2.1)-(2.2) reducesto a linear convection equation for the directed intensity u(·, s)
(s · ∇x + κ(x)) u(x, s) = κ(x)Ib(x) in D
u(x, s) = 0 on Γ−(s),
where for any s ∈ S
Γ−(s) := x ∈ ∂D; s · n(x) < 0.
It is well known that its standard Galerkin discretization by means of continuous trial functionsis unstable (e.g. [21]). In [22], the SUPG-method is used to stabilize the formulation. Thedrawback of this method, however, is that the mesh width h enters the formulation. As we usea multiscale approach it is not clear how this parameter should be chosen. Therefore we preferthe variational formulation to be independent of the meshes used and opt for a least-squaresstabilization. For constant absorption coefficients, the least squares formulation with a scalingparameter 1
κ was proposed e.g. in [6] and [23]. However, as we want our method also to beapplicable to transparent media (i.e. κ = 0), we have chosen to adapt the stabilized variationalformulation proposed in [24] to non-constant absorption coefficients. Least-squares formulationsare also applicable when scattering terms are present [3, 4, 30].
The least-squares minimization problem then reads: we seek u : D×S 7→ R as the minimizerof the quadratic least squares functional
J(u) := (ε(s · ∇xu+ κu− κIb), s · ∇xu+ κu− κIb)L2 , (2.3)
where
ε(x) =
1, κ(x) < κ0,1
κ(x) , κ(x) ≥ κ0,(2.4)
with κ0 as defined later in this section.
In (2.3), we adopted the notation
(u, v) := (u, v)L2(D×S) =
∫
D
∫
Su v ds dx
and the associated L2-norm will be denoted by ‖‖.For the proper statement of this minimization problem as well as of the Finite Element
Method below, we define the Hilbert spaces
V := u ∈ L2(D × S) : s · ∇xu ∈ L2(D × S). (2.5)
We equip V in (2.5) with the norm ‖‖S , defined by
‖u‖2S := ‖s · ∇xu‖2 + ‖u‖2 (2.6)
and introduce the subspace
V0 := u ∈ V : u = 0 on Γ− .Here, the homogeneous essential boundary condition on Γ− is well defined as V0 is a closed,linear subspace of V due to the continuity of the corresponding trace operator, cf. [9, 10] or [15,Chap. XXI, §2].

CHAPTER 2. SPARSE TENSOR PRODUCT DISCRETIZATION 9
Next we introduce the bilinear form
a(u, v) := (ε s · ∇xu, s · ∇xv)L2 + (ε s · ∇xu, κ v)L2 (2.7)
+ (ε κu, s · ∇xv)L2 + (ε κu, κ v)L2 .
and define the “source” functional
f(v) := (ε κ2 Ib, v)L2 + (ε κ Ib, s · ∇xv)L2 . (2.8)
Then the resulting linear variational problem reads: seek u ∈ V0 such that
a(u, v) = f(v) ∀v ∈ V0 . (2.9)
We first state the Poincare-Friedrichs inequalities that we will need for the proof of Theorem2.2. For d1 = 2 we have to assume that there is a constant 0 < C <∞ such that
||u|| ≤ C ||s · ∇xu||. (2.10)
For d1 = 3, however, we have the following lemma:
Lemma 2.1. (Poincare-Friedrichs inequality for D ⊂ R)Let D ⊂ R
3, be bounded (diam(D) ≤ C <∞). Then for all u ∈ V0 the following holds:
||u|| ≤ C ||s · ∇xu||.
Proof. The proof is analogous to that of Lemma 3.1 in [23], taking into account zero inflowboundary conditions.
Then the following theorem holds
Theorem 2.2. For every non-negative and bounded κ the bilinear form a(u, v) is continuous onV×V and coercive on V0×V0 equipped with the norm ‖‖S. In particular, for every Ib ∈ L2(D),there exists a unique weak solution u ∈ V0 of the stabilized variational form (2.9) of the radiativetransfer problem (2.1)- (2.2).
Proof. We extend the proofs in [24] to non-constant absorption coefficients and prove continuityand coercivity for d1 = 2, 3. Existence and uniqueness then follow from the Lax-MilgramTheorem [2].
We state the proof for the regimes (κ < κ0 ≤ 1) and (κ ≥ κ0) separately, where κ0 still hasto be determined.
• Continuity for κ < κ0 ≤ 1: For κ < κ0, the scaling parameter ε is equal to 1 and
|a(u, v)| = |(s · ∇xu, s · ∇xv) + (κu, s · ∇xv) + (s · ∇xu, κv) + (κu, κv)|≤ |(s · ∇xu, s · ∇xv)| + |(u, s · ∇xv)|+ |(s · ∇xu, v)|+ |(u, v)|≤ 2‖u‖S‖v‖S ,
where we used Cauchy-Schwarz inequality and the fact that |κ| < 1.
• Continuity for κ ≥ κ0 > 0: For κ ≥ κ0, the scaling parameter ε is equal to 1κ and
|a(u, v)| = |( 1
κs · ∇xu, s · ∇xv) + (u, s · ∇xv) + (s · ∇xu, v) + (u, κv)|
≤ 1
κ0|(s · ∇xu, s · ∇xv)|+ |(u, s · ∇xv)|+ |(s · ∇xu, v)| + ‖κ‖∞|(u, v)|
≤ (max 1
κ0, ‖κ‖∞+ 1)‖u‖S‖v‖S

10 2.1. WEIGHTED LEAST-SQUARES VARIATIONAL FORMULATION
• Coercivity for κ < κ0 ≤ 1:
a(u, u) = (s · ∇xu, s · ∇xu) + (κu, s · ∇xu) + (s · ∇xu, κu) + (κu, κu)
≥ ‖s · ∇xu‖2 − 2|(s · ∇xu, κu)|≥ (1− β)‖s · ∇xu‖2 + β‖s · ∇xu‖2 − α‖s · ∇xu‖2 −
1
ακ0‖u‖2,
for all α > 0, where we applied the inequality ab ≤ a2
2 + b2
2 . Using the Poincare-Friedrichsinequality from Assumption (2.10) or Lemma (2.1), we obtain
a(u, u) ≥ (1− α− β)‖s · ∇xu‖2 + (β
C2− 1
ακ0)‖u‖2,
• Coercivity for κ ≥ κ0 > 0:
a(u, u) = (1
κs · ∇xu, s · ∇xu) + (u, s · ∇xu) + (s · ∇xu, u) + (u, κu)
≥ 1
‖κ‖∞(s · ∇xu, s · ∇xu) + (u, s · ∇xu) + (s · ∇xu, u) + κ0(u, u)
≥ 1
‖κ‖∞(s · ∇xu, s · ∇xu) + 2(s · ∇xu, u) + κ0(u, u)
≥ min 1
‖κ‖∞, κ0‖u‖2S ,
taking into account that 2(u, s · ∇xu) =∫∂D×S n · su2 dΓ ds =
∫S
∫Γ+(s) n · su2 dΓ dx ≥ 0,
whereΓ+(s) := x ∈ ∂D : s · n(x) > 0 ⊂ ∂D, s ∈ S.
We now choose α > 0, β > 0 and κ0 > 0 as the solution of the optimization problem to maximizethe coercivity coefficient.
minα,β,κ0
1− α− β, βC2− κ0
α, κ0 → max .
and obtain
κ0 =α0 − α2
0
C2α0 + α0 + C2with α0 =
−C2 +√
2C4 + C2
C2 + 1.
If C = 1 this leads to α ≈ 0.366, β = 0.5 and κ0 ≈ 0.134 as optimal value. Alternatively, toavoid artificial discontinuities in the formulation, κ0 can be chosen to be 1, which will slightlyincrease the constants.
The bilinear form therefore satisfies
|a(u, v)| ≤ (max 1
κ0, ‖κ‖L∞+ 1)‖u‖S‖v‖S
|a(u, u)| ≥ min 1
‖κ‖L∞
, κ0‖u‖2S .
As the bilinear form a(., .) is symmetric and positive definite on V0, the expression
‖u‖A :=√a(u, u)
defines a norm on V0, to which we will refer as “energy”- or A-norm.

CHAPTER 2. SPARSE TENSOR PRODUCT DISCRETIZATION 11
2.2 Galerkin Discretization
From now on, the variational problem (2.9) will be considered on the space
V0 := H1,0(D × S) ∩ V0, H1,0(D × S) := H1(D)⊗ L2(S).
In what follows, we shall assume that the weak solution of (2.9) belongs to V0. Note that thisassumption precludes line discontinuities of u in D which may arise due to transport along raysof discontinuous boundary data. The Galerkin discretization of (2.9) is obtained, as usual, byrestricting u and v in the weak formulation (2.9) to a one-parameter family of finite dimensionalsubspaces V L
0 L of V0, where the superscript L will denote “level” of mesh refinement.This discretized variational problem then reads: seek uL ∈ V L
0 such that
a(uL, v) = f(v) ∀v ∈ V L0 . (2.11)
Due to the coercivity and continuity of a(·, ·) on V0×V0 , (2.11) admits a unique solution whichsatisfies the Galerkin orthogonality
∀v ∈ V L0 : a(u− uL, v) = 0. (2.12)
As a consequence of (2.12) and of Theorem 2.2, the error eL = u − uL is quasioptimal in the‖ ‖S-norm (2.6), i.e. for every subspace V L
0 of V0 which is closed in V0 with respect to the‖ ‖S-norm we obtain
‖u− uL‖S ≤ C(κ,D) infvL∈V L
0
‖u− vL‖S .
We exploit this stability to construct sequences V L0 of subspaces of V0 by sparse tensorization.
Since the computational domainD×S is a cartesian product of two subdomains, we build V L0 out
of tensor products of “component” Finite Element (FE) spaces in D and in S, respectively. Note,however, that due to the s-dependence of the Dirichlet boundary Γ−(s) ⊂ ∂D, the subspacesV L
0 will generally not be of tensor product type, once the boundary condition (2.2) is imposed.Let us start by giving the construction of the component spaces without boundary conditions.
To this end, we equip the domain D with a triangular (d1 = 2) or tetrahedral (d1 = 3) mesh T 0D,
and the sphere with a mesh T 0S consisting of intervals (d2 = 1) or spherical triangles (d2 = 2),
respectively. The hierarchical mesh sequences
T lD, T l
S, l = 1, ..., L, (2.13)
are then obtained by uniform dyadic refinement of the coarse meshes (Fig. 2.1).On the hierarchical mesh sequences, we specify FE spaces. In physical space D, the FE
space
V LD := S1,1(D,T L
D ) ⊂ H1(D)
consists of piecewise linear functions on the finest triangulation T LD which are continuous in the
physical domain D. For curved elements at the boundary, isoparametric element mappings areused. In the solid angle S, we use
V LS := S0,0(S,T L
S ) ⊂ L2(S)
of discontinuous, piecewise constant functions on the spherical elements of T LS .
Based on the FE spaces V LD and V L
S in the component domains D and S, we build the tensorproduct space

12 2.2. GALERKIN DISCRETIZATION
(a) physical space level 0 (b) physical space level 1 (c) physical space level 2 (d) physical space level 3
(e) solid angle level 0 (f) solid angle level 1 (g) solid angle level 2 (h) solid angle level 3
Figure 2.1: Mesh hierarchies used in the sparse tensor product space.
V L := V LD ⊗ V L
S = S1,1(D,T LD )⊗ S0,0(S,T L
S ).
In order to satisfy the boundary conditions, we restrict the space to the subspace of zeroinflow. Neglecting the fact that the resulting space is - strictly speaking - not of tensor productstructure - we will call it the Full Tensor Product Space of level L.
Definition 2.3. (Full Tensor Product Space)The Full Tensor Product Space V L
0 of level L is defined as
V L0 := V L ∩ V0.
The Galerkin discretized problem then reads: seek uL(x, s) ∈ V L0 such that
a(uL, vL) = f(vL) ∀vL ∈ V L0 . (2.14)
We now choose a set of basis functions αi(x), i = 1, ...,ML = dimV LD , for V L
D and a set of basisfuntions βj(s), j = 1, ..., NL = dimV L
S , for V LS .
Neglecting the boundary conditions, the approximate intensity uL ∈ V L and the test functionvL ∈ V L can be expressed in tensor product form
uL(x, s) =
ML∑
i=1
NL∑
j=1
uijαi(x)βj(s) ∈ V L. (2.15)
Inserting the ansatz (2.15) for uL and vL into the variational formulation (2.14) leads to a linearsystem of equations for the ML ·NL unknowns uij.
A natural choice for the bases
αi(x), i = 1, ...,ML, and βj(s), j = 1, ..., NL,
are what in the following will be referred to as the standard bases.
Definition 2.4. (Standard Bases)The standard bases on meshes T L
D and T LS are the
• locally supported piecewise linear ”hat functions” for V LD , that is αi(vj) = δij , where
v1, ..., vML is the set of vertices of T L
D ,

CHAPTER 2. SPARSE TENSOR PRODUCT DISCRETIZATION 13
• and the characteristic functions of the elements of T LS as βj(s), j = 1, . . . , NL.
Using these standard bases, the boundary condition can be imposed by setting all coefficientsto zero, where the corresponding product basis function αi(x)βj(s) makes a contribution to theinflow at the boundary.
As ML is the number of vertices arising from a d1 = 2 or d1 = 3-dimensional triangulationand NL the number of elements of a d2 = 1 or d2 = 2-dimenional mesh, the number of unknowsgrows very rapidly when the meshes in physical space and solid angle are refined. A firstattempt is to try and keep both NL and ML small by picking adapted bases that offer a goodrepresentation of the solution with only a few degrees of freedom. The construction of suchbasis functions can be pursued via local adaptive mesh refinement starting from T 0
D and T 0S .
Then, the ultimate trial and test functions are built according to (2.15). The limitations of thisapproach are evident: since the space V L
S is expected to provide good resolution of the radiationeverywhere, T L
S will usually have to be a fairly uniform mesh.Yet, using all the product basis functions αi(x)βj(s), i = 1, . . . ,ML, j = 1, . . . , NL, as in
(2.15), may not be necessary at all, because only a few of them may really make a significantcontribution to representing the final solution. Hence, a promising approach to obtaining efficienttrial spaces is to select a few significant product basis functions of the form αi(x)βj(s) and letthem span a subspace of V L. The component basis functions αi and βj may be chosen from large,even infinite, sets, which will not translate into prohibitively large discrete problems. This ideaunderlies the present approach to the Galerkin discretization of the radiative transfer problemwhich is based on (adaptive) sparse tensor products of the hierarchical component FE spacesV L
D and V LS .
2.3 Sparse Tensor Product Spaces
The selection of significant product basis functions needs to follow strict rules in order to over-come the curse of dimensionality without compromising accuracy. Such a set of rules for se-lecting basis functions a-priori is offered by the framework of sparse grids described in section1.2 [8, 42]. However, as the radiative transfer equation lacks tensor product structure due tothe inflow boundary conditions, it is not straightforward to apply such standard sparse gridsdiscretizations to our problem.
2.3.1 Sparse Tensor Product Space without Boundary Conditions
If we neglect the boundary conditions, we can adapt these techniques to sparse tensor productsof FE spaces in H1,0(D × S) ≃ H1(D)⊗ L2(S). For notational convenience, we define Ω to bethe d1 + d2-dimensional product domain
Ω := D × S.
Based on the nested triangulations T lD and T l
S , l = 0, 1, 2, ..., defined in (2.13), we recall thecorresponding nested sequences of Finite Element spaces
V lD := S1,1(D,T l
D) ⊂ H1(D), V lS := S0,0(S,T l
S) ⊂ L2(S).
Here, S1,1(D,T lD) denotes the continuous, piecewise linear functions on T l
D and S0,0(S,T lS) de-
notes the space of discontinuous, piecewise constant functions on T lS.
As the triangulations, these sequences of spaces are in turn nested and V lD and V l
S can bewritten as the direct sum of the coarser spaces and so-called “detail spaces” W l
D, W lS .
V lD = W l
D ⊕ V l−1D , V l
S = W lS ⊕ V l−1
S , l = 1, 2, ... (2.16)

14 2.3. SPARSE TENSOR PRODUCT SPACES
These detail spaces W lD and W l
S are not unique. In solid angle, we use the L2-orthogonaldecomposition as in [39], while in physical space, we use the hierarchical basis of hat functions,which means that the spaces W l
D, l = 0, 1, ..., are the span of all the hat functions on T lD that
do not correspond to vertices of T l−1D .
Iterating (2.16), we see that for l ≥ 1 the spaces V lD and V l
S possess a decomposition intothe detail subspaces W l
D and W lS , respectively:
V lD =
l⊕
i=0
W iD, V l
S =
l⊕
i=0
W iS ,
where we defined W 0D := V 0
D and W 0S := V 0
S , respectively.With these definitions, the full tensor product space V L ⊂ H1(D)⊗L2(S) at mesh refinement
level L is easily seen to coincide with
V L = V LD ⊗ V L
S =⊕
0≤lD ,lS≤L
W lDD ⊗W
lSS .
We shall consider the sparse tensor product space without boundary conditions V L ⊂ V L definedby
Definition 2.5. (Sparse Tensor Product Space without Boundary Conditions)The sparse tensor product space without boundary conditions of level L is defined as the
direct sum of tensor products of detail spaces whose sum of the levels is smaller or equal to L.
V L :=⊕
0≤lD+lS≤L
W lDD ⊗W
lSS
This space is illustrated schematically in Fig. 2.2. As
dim(V lD) = O(2d1l) and dim(V l
S) = O(2d2l),
where d1 and d2 with d1 ≤ d2 are the (fixed) dimensions of D and S, respectively, the lth
”column”, l = 0, ..., L, in Fig. 2.2 contains at most O(2d1(L−l) · 2d2l) ≤ O(2d1L) = O(ML)degrees of freedom. Therefore
dimV L0 = O(NLML), dimV L = O((L+ 1) ·ML) (2.17)
as L→∞.Since the sparse tensor product space V L is substantially smaller than the full tensor product
space V L, accuracy may be lost. However, for functions u(x, s) that are sufficiently smooth,namely u(x, s) ∈ H2,1(Ω), where for α, β ∈ N0
‖u‖2Hα,β(Ω) :=∑
α′≤αβ′≤β
‖∂α′
x∂β′
su‖2,
the following theorem gives crucial approximation properties of the sparse grid space [38].
Theorem 2.6. Under the assumption that u ∈ H2,1(Ω), the best-approximation in the full tensorproduct space V L, with mesh width hL in both domains, satisfies the asymptotic error estimate
infv∈V L
‖u− v‖S ≤ infv∈V L
‖u− v‖H1,0(Ω) . hL ‖u‖(H2,0∩H1,1)(Ω)
and best-approximation in the sparse tensor product space V L satisfies the error estimate
infv∈bV L
‖u− v‖S ≤ infv∈bV L
‖u− v‖H1,0(Ω) . hL(L+ 2) ‖u‖H2,1(Ω)
Here, ∼ and . indicate equivalences up to constants which are independent of hL and of NL,ML as L→∞.

CHAPTER 2. SPARSE TENSOR PRODUCT DISCRETIZATION 15
W 0S W 1
S W 2S W 3
S
W 0D
W 1D
W 2D
W 3D
W lSS
W lDD
W 0D ⊗W 0
S W 0D ⊗W 1
S W 0D ⊗W 2
S W 0D ⊗W 3
S
W 1D ⊗W 0
S
W 2D ⊗W 0
S
W 3D ⊗W 0
S
W 1D ⊗W 1
S W 1D ⊗W 2
S
W 2D ⊗W 1
S
Figure 2.2: Tensor products of detail spaces that are contained in the sparse tensor productspace V L (for L = 3).

16 2.3. SPARSE TENSOR PRODUCT SPACES
Proof. Based on the nodal interpolation operators
P lD : H2(D) −→ V l
D
in physical space and the L2-projection operators
P lS : L2(S) −→ V l
S
in solid angle, with the convention that P−1D = P−1
S = 0, we define the operator
PL : H1,0(Ω) −→ V L
as follows:
uL(x, s) := PLu(x, s) :=∑
0≤lD+lS≤L
(P lD
D − PlD−1D
)⊗(P lS
S − PlS−1S
)u(x, s).
For functions v(x) ∈ H2(D) and w(s) ∈ H1(S), the following approximation properties holdfor l ∈ N0 (see eg. [26]):
||v − P lDD v||H1(D) . 2−lD ||v||H2(D), (2.18)
||w − P lSS w||L2(S) . 2−lS ||w||H1(S). (2.19)
The asymptotic density of the discrete subspace sequences in H1(D)⊗L2(S) permits us to writeany function u ∈ H1(D)⊗ L2(S) uniquely as
u(x, s) =
∞∑
lD ,lS=0
ulD ,lS(x, s), ulD ,lS ∈W lDD ⊗W
lSS .
Then for the best approximation vL of u in the sparse tensor product space, the following holds:
minbvL∈bV L
||u− vL||H1,0(Ω) ≤ ||u− PLu||H1,0(Ω) = ||∞∑
lD=0
∞∑
lS=max0,L−lD+1
ulD,lS ||H1,0(Ω)
≤ ||L∑
lD=0
∞∑
lS=L−lD+1
ulD,lS ||H1,0(Ω)
︸ ︷︷ ︸:=I
+ ||∞∑
lD=L+1
∞∑
lS=0
ulD,lS ||H1,0(Ω)
︸ ︷︷ ︸:=II
.
For the first part, we have the following estimate:
I := ||L∑
lD=0
∞∑
lS=L−lD+1
ulD ,lS ||H1,0(Ω)
= ||L∑
lD=0
(P lD
D − Id+ Id− P lD−1D
)⊗(Id− PL−lD+1
S
)u||H1,0(Ω)
≤L∑
lD=0
(||(Id− P lD
D
)⊗(Id− PL−lD+1
S
)u||H1,0(Ω)
+ ||(Id− P lD−1
D
)⊗(Id− PL−lD+1
S
)u||H1,0(Ω)
).
With u ∈ H2,1(Ω) and using (2.18) and (2.19), we find that
||(Id− P lD−1D )⊗ (Id− PL−lD+1
S )u|| . 2−L||u||H2,1(Ω),
||(Id− P lDD )⊗ (Id− PL−lD+1
S )u|| . 2−L||u||H2,1(Ω).

CHAPTER 2. SPARSE TENSOR PRODUCT DISCRETIZATION 17
Under the same assumptions, the following estimate holds for the second summand
II := ||∞∑
lD=L+1
∞∑
lS=0
ulD,lS ||H1,0(Ω) = ||(Id − PLD)u||H1,0(Ω) . 2−L||u||H2,0(Ω).
The best approximation converges then as
infbvL∈bVL
||u− vL||H1,0(Ω) . (L+ 2)2−L||u||H2,1(Ω).
As hL ≃ 2−L and ‖u‖S ≤ ‖u‖H1,0(Ω) for any function u ∈ H2,1(Ω)
infvL∈bV L
||u− vL||S ≤ infvL∈bV L
||u− vL||H1,0(Ω) . hL (L+ 2) ||u||H2,1(Ω).
The error estimate for the full tensor product approximation can be obtained in the same waywith the corresponding adaptations to the summation limits
infvL∈V L
||u− vL||S ≤ infvL∈V L
||u− vL||H1,0(Ω) . hL ||u||(H2,0∩H1,1)(Ω).
2.3.2 Sparse Tensor Product Space with zero Inflow Boundary Conditions
In [39], we set
V L0 := V L ∩ V0, V L
0 := V L ∩ V0.
and enforced the boundary conditions in the implementation by projecting the solution onto asubspace with zero inflow. In the following, we will construct a subspace of V L that stronglysatisfies the boundary conditions.
Remark 2.7. Alternatively, we could weakly enforce the boundary conditions as suggested in[24]. This approach, however, leads to an additional term in the least-squares formulation, whichmay be difficult to deal with when solving the equation.
The restriction of strongly enforced boundary conditions implies that the transition regionbetween inflow and outflow directions on Ω must not be in the support of any function containedin the space to be constructed. As this region plays a major role in the construction, we defineγ as the transition zone between inflow and outflow boundary
γ := Γ− ∩ Γ+ = (x, s) ∈ ∂D × S; n(x) · s = 0 ⊂ ∂Ω, (2.20)
where Γ− is the inflow part and Γ+ the outflow part of Ω as defined previously. For a fixedx ∈ ∂D, γ(x) is the subdomain of S
γ(x) := s ∈ S; n(x) · s = 0,
for a fixed s ∈ S, γ(s) is the subdomain of ∂D
γ(s) := x ∈ ∂D; n(x) · s = 0
and for a spherical triangle TS on T lS, γ(TS) is defined as
γ(TS) := γ(s); s ∈ TS.

18 2.3. SPARSE TENSOR PRODUCT SPACES
x
y
Tangent in x to D
γ(x)
φD
Figure 2.3: For a fixed x ∈ ∂D, D ⊂ R2, γ(x) only depends on angle ϕ of the tangent in x to
D.
For the case (d1, d2) = (2, 2), D is a two-dimensional domain and S = S2, and for a fixedx ∈ ∂D, γ(x) is a great circle on S2 in the plane spanned by the tangent in x to D and thez-axis. If s is represented in spherical coordinates
s = (cosϕ sin ϑ, sinϕ sin ϑ, cos ϑ)T , 0 ≤ ϕ ≤ 2π, 0 ≤ ϑ ≤ π,
and ϕ is the azimuthal angle that corresponds to the tangent in x to D (Fig. 2.3), then
γ(x) = (cos ϕ sinϑ, sin ϕ sinϑ, cos ϑ)T , 0 ≤ ϑ ≤ π∪ (cos(ϕ+ π) sinϑ, sin(ϕ+ π)T sinϑ, cos ϑ), 0 ≤ ϑ ≤ π.
For any fixed ϑ, 0 < ϑ < π, inflow boundary, outflow boundary and transition region γ(ϑ),defined as
γ(ϑ) = (cosϕ sin ϑ, sinϕ sinϑ, cos ϑ)T , 0 ≤ ϕ ≤ 2π
are displayed in Figs 2.4 and 2.5.We now construct the sparse tensor product space with boundary conditions V L
0 ⊂ V L0 as
follows: For any fixed TS ∈ T LS , we consider the space of functions on D× TS that are constant
with respect to solid angle s, continuous and piecewise linear on T LD and zero on γ(TS) ⊂ ∂D.
This space is denoted by V LTS ,0. In the same way, we define V lD
TS ,0 to be the space of functions on
D × TS that are constant with respect to solid angle s, continuous and piecewise linear on T lDD

CHAPTER 2. SPARSE TENSOR PRODUCT DISCRETIZATION 19
−4 −3 −2 −1 0 1 2 3 4−10
−5
0
5
10
−1
0
1
2
3
4
5
6
7
x
y
φ
Figure 2.4: For any fixed ϑ, 0 < ϑ < π, the product domain (x, ϕ) ∈ D × S1 is displayed,including a regular triangulation of mesh width hL on ∂D×S1. The yellow subdomain of ∂D×S1 corresponds to the inflow boundary Γ− and the gray subdomain to the outflow boundaryΓ+.

20 2.3. SPARSE TENSOR PRODUCT SPACES
0 1 2 3 4 5 60
1
2
3
4
5
6
∂ D
S1
Figure 2.5: The product domain ∂D × S1 in a two-dimensional representation with inflowboundary Γ− in yellow, outflow boundary Γ+ in gray and transition region γ(ϑ) marked inred.
and zero on γ(TS) ⊂ ∂D. As these spaces are nested, we can define TS-dependent detail spacesW lD
TS ,0 such that
V lDTS ,0 = V lD−1
TS ,0 ⊕WlDTS ,0, lD = 1, ..., L.
As in (2.16), these detail spaces are not unique and also for these TS-dependent spaces we choosethe hierarchical basis of hat functions.
With the convention that W 0TS ,0 := V 0
TS ,0, VLTS ,0 can be expressed as a direct sum of TS-
dependent detail spaces
V LTS ,0 =
L⊕
lD=0
W lDTS ,0.
As we use the hierarchical basis of hat functions, each of the subspaces W lDTS ,0 can be repre-
sented as the span of a set of hat functions on T lDD . To be more precise, W lD
TS ,0 contains exactly
those hat functions of level lD that correspond to vertices of T lDD where there is no corresponding
(coarser) basis function in W lD−1TS ,0 , and whose support does not overlap with γ(TS) (Fig. 2.6).
The construction of the detail spaces
W lDTS ,0, lD = 0, ..., L, for all TS ∈ T L
S ,
requires, compared to a standard hierarchical basis, additional hat functions near the boundary∂D. Let DD denote the dictionary of hat functions such that each detail space W lD
TS ,0, lD =
0, ..., L, TS ∈ T LS , can be constructed.
DD := ϕlDiD, 0 ≤ lD ≤ L, iD ∈ I(lD)

CHAPTER 2. SPARSE TENSOR PRODUCT DISCRETIZATION 21
Basis functions in W 0TS ,0
Basis functions in W 1TS ,0
Basis functions in W 2TS ,0
γ(TS)
Figure 2.6: Basis functions in the detail spaces W lTS ,0, l = 0, 1, 2. The vertices where the
level of the basis function is higher than the level of the vertex are marked with blue circles.
Here, ϕlDiD
is the hat function on level lD at vertex with index iD and I(lD) is an index set of
vertices on T lDD . For each fixed spherical triangle TS on T L
S , the spaces W lDTS ,0, lD = 0, ..., L, can
then be written as a direct sum of some of the basis functions in the dictionary DD
W lDTS ,0 =
⊕
iD∈I(lD)
SpanαlD ,iDTS
ϕlDiD,
where
αlDTS ,iD
=
1, if ϕlD
i is a basis function of W lDTS ,0,
0, otherwise.
We now consider for each fixed index pair (iD, lD) the space V LlD ,iD
that is spanned by the
characteristic functions of those triangles on T LS where αlD ,iD
TS= 1. Analogously, we define V lS
lD ,iD
to be the space of all piecewise constant functions on T lSS that are contained in V L
lD,iDand define
the L2(S)-orthogonal detail spaces W lSlD,iD
V lSlD ,iD
= V lS−1lD ,iD
⊕W lSlD ,iD
, lS = 1, ..., L.
With the definition that W 0lD ,iD
:= V 0lD,iD
, V LlD,iD
can be expressed as a direct sum of such detailspaces
V LlD ,iD
=
L⊕
lS=0
W lSlD ,iD
.
The basis functions of the detail spaces W lSlD,iD
are either L2-orthogonal Haar-wavelets that areslightly adapted to S in the case where all characteristic functions in the support of the waveletare contained in V L
l,i, or characteristic functions on T lSS .
Let DS be the dictionary of all basis functions that are required to build any of the subspacesW lS
lD,iD, 0 ≤ lS , lD ≤ L, iD ∈ I(lD)
DS := ψlSiS
; 0 ≤ lS ≤ L, iS ∈ J(lS),

22 2.4. GRADED SPARSE TENSOR PRODUCT SPACE
where ψlSiS
is either a characteristic or a wavelet function on level lS and J(lS) a level index set.
W lSlD ,iD
can then be written as a direct sum of a subset of functions in the dictionary DS
W lSlD ,iD
=⊕
iS∈J(lS)
SpanβlD ,lSiD ,iS
ψlSiS,
where
βlD ,lSiD ,iS
=
1, if ψlS
iSis a basis function of W lS
lD,iD,
0, otherwise.
V L0 can then be written as a direct sum of a subset of product functions ϕlD
iDψlS
iS, ϕlD
iD∈
DD, ψlSiS∈ DS,
V L0 =
L⊕
lD,lS=0
⊕
iD∈I(lD)iS∈J(lS)
SpanβlD,lSiD ,iS
ϕlDiD⊗ ψlS
iS.
We now define a space with strongly enforced zero inflow boundary conditions, which from nowon will be referred to as the sparse tensor product space.
Definition 2.8. (Sparse Tensor Product Space V L0 )
The sparse tensor product space is the subspace of V L of those product basis functions wherethe sum of the levels is smaller or equal to L.
V L0 :=
⊕
lD+lS≤L
⊕
iD∈I(lD)iS∈J(lS)
SpanβlD,lSiD,iS
ϕlDiD⊗ ψlS
iS.
As V L0 is a subspace of V L
NL := dim(V L0 ) ≤ dimV L = O((L+ 1)ML), (2.21)
as L→∞ (see equation 2.17).V L
0 is a proper subspace of V L and accuracy will be lost close to the transition line γ withthe consequence that the approximation rate of Theorem 2.6 is no longer valid for functions inV L
0 .In the context of circuit breaker simulations, the loss of accuracy close to γ is only a minor
issue, as - under the condition that the intensity is sufficiently smooth - the function in theseareas is generally small. Resolving the steep gradients in temperature at the edge of the burningarc is of much greater importance. However, for cases where higher accuracy is required nearthe transition zone γ, we propose an enriched sparse tensor product space, which we call gradedsparse tensor product space in section 2.4. This space guarantees the approximation rate ofTheorem 2.6 in a slightly weaker norm with a moderate increase of degrees of freedom by alogarithmic factor.
2.4 Graded Sparse Tensor Product Space
2.4.1 Definition
In order to obtain a space V LG with the desired sparse grid approximation properties
infvL∈bV L
G
‖u− vL‖S . hL(L+ 1)‖u‖H2,1(Ω),

CHAPTER 2. SPARSE TENSOR PRODUCT DISCRETIZATION 23
0 1 2 3 4 5 60
1
2
3
4
5
6
∂ D
S1
Figure 2.7: The intersection of the domains Ωl0 (dark blue and light blue) and Ωl0γ (light blue)
for the case (d1, d2) = (2, 1), where ∂D × S1 is discretized on the finest level l0 = L. Thetransition area γ is marked in red.
we construct a discrete space that is refined towards the transition zone γ (2.20). We know thatthese improved approximation properties compared to the sparse tensor product space V L
0 canbe obtained at affordable costs with respect to the number of degrees of freedom: this enrichedspace, which we will call graded sparse tensor product space, will contain
NGL = O
(NL(logML)2 +ML(logNL)2
)
degrees of freedom. Compared to the standard sparse tensor product space V L0 (2.17), this is
only an increase by a logarithmic factor.We start by building sparse tensor products of FE-spaces in sub-domains of Ω that do not
intersect with the transition region γ between inflow and outflow directions on ∂D × S.For each level l0, 0 ≤ l0 ≤ L, we define Ωl0 to be the union of all product domains of elements
on T l0D and elements on T l0
S that do not intersect with γ (Fig. 2.7)
Ωl0 :=⋃
TS∈Tl0
S, TD∈T
l0D
,
int(TS×T bdD
)∩γ=∅
TD × TS ,
where T bdD denotes the d1 − 1 dimensional sub-domain TD ∩ ∂D and int(A) the interior of a
domain A.For 0 < l0 ≤ L, Ωl0
γ is the sub-domain of Ωl0 that is closest to γ (Figs. 2.7 and 2.8)
Ωl0γ :=
⋃
TS∈Tl0
S, TD∈T
l0D
,
(TS×TD)∈Ωl0 ,
(TS×TD)∩“
(Ω\Ωl0 )∪γ”
6=∅
TD × TS

24 2.4. GRADED SPARSE TENSOR PRODUCT SPACE
γ
ϕ
D
∂D
Figure 2.8: The domain ΩLγ (light blue) as a sub-domain of D × S1.
and Ω0γ := Ω0, ΩL+1
γ := ∅.On each domain Ωl0
γ with l0 ∈ 0, ..., L fixed, we now construct a sparse tensor productspace without boundary conditions (Definition 2.5) of maximum level lm with l0 ≤ lm ≤ L. Foreach triangle TS of T l0
S and l0 ≤ lS ≤ lm we define the nested sequence of FE-spaces
V l0,lSTS
:= S0,0(TS ,T lSS ) ⊂ L2(S) (2.22)
and the sub-domain DTSof D
DTS:=
⋃
TD⊂Tl0
D
TD×TS∈Ωl0γ
TD.
On each of these TS-dependent sub-domains DTS, we define for l0 ≤ lD ≤ lm the spaces
V l0,lDDTS
:= v ∈ S1,1(DTS,T lD
D ). (2.23)
Here, for any sub-domain D ⊂ D, S1,1(D,T lDD ) denotes the space of piecewise linear functions
on T lDD that are continuous on D and zero on D\D and for any triangle TS ∈ T l0
S , S0,0(TS ,T lSS )
denotes the space of discontinuous, piecewise constant functions on T lSS that vanish on S\TS .
Both sequences of spaces (2.22) and (2.23) are, in turn, nested, and there exist detail spaces
W l0,lDDTS
, W l0,lSTS
such that
V l0,lDDTS
= W l0,lDDTS
⊕ V l0,lD−1DTS
, V l0,lSTS
= W l0,lSTS⊕ V l0,lS−1
TS. (2.24)
Iterating (2.24), we see that for l0 ≤ lD, lS ≤ lm the spaces V l0,lDDTS
and V l0,lSTS
possess a
decomposition into the detail subspaces W l0,lDDTS
and W l0,lSTS
, respectively:
V l0,lmDTS
=
lm⊕
lD=l0
W l0,lDDTS
, V l0,lmTS
=
lm⊕
lS=l0
W l0,lSTS
,
where we set, for notational convenience W l0,l0DTS
:= V l0,l0DTS
and W l0,l0TS
:= V l0,l0TS
, respectively.
We now use the detail spaces defined above to construct sparse tensor product spaces on thesub-domains Ωl0
γ , 0 ≤ l0 ≤ L. In contrast to the sparse tensor product space in the previoussection, we include all products of basis functions with the sum of the levels smaller or equal toL+ l0 instead of L in the subspace based on the meshes of level l0.

CHAPTER 2. SPARSE TENSOR PRODUCT DISCRETIZATION 25
Definition 2.9. (Sparse Tensor Product Subspace V l0,L)The sparse tensor product subspace V l0,L is defined as the direct sum of the tensor product
spaces on Ωl0γ , where the sum of the levels is smaller or equal to L+ l0.
V l0,L :=⊕
TS∈Tl0
S
⊕
lD+lS≤L+l0l0≤lD,lS≤L
W lDDTS⊗W lS
TS.
V l0,L is continuous with respect to D on Ωl0γ but possibly discontinuous across its boundary
∂Ωl0γ on Ω. We therefore define the Graded Sparse Tensor Product Space as the union of these
subspaces intersected by the space of functions that on the one hand are continuous and piecewiselinear with respect to T L
D and piecewise constant with respect to T LS and on the other hand
incorporate the homogeneous essential inflow boundary conditions.
Definition 2.10. (Graded Sparse Tensor Product Space V LG )
The graded sparse tensor product space is the subspace of the union of the subspaces V l0,L thatis contained in V L
0 .
V LG :=
L⋃
l0=0
V l0,L
∩ V L
0
In the following subsection we will give an upper bound for the number of degrees offreedom for the cases (d1, d2) = (2, 1), (2, 2) and (3, 2), i.e. D ⊂ Rd1 , s ∈ Sd2 , (d1, d2) =(2, 1), (2, 2), (3, 2). The proofs in subsection 2.4.3, however, will be restricted to the (d1, d2) =(2, 1) and (2, 2) cases.
2.4.2 Number of Degrees of Freedom
The refinement towards the transition zone γ on the boundary ∂D×S requires additional degreesof freedom compared to the standard sparse tensor product space V L
0 . In this section we provethat the upper bound for number of the degrees of freedom in the new space compared with thespace V L
0 is only increased by a logarithmic factor L. Instead of
NL = O(ML logNL +NL logML) = O(LmaxML, NL) = O(LML)
degrees of freedom for the cases (d1, d2) = (2, 1), (2, 2), (3, 2),
NGL = O(L2ML)
degrees of freedom are required. The proof is based on the fact that the dimension of thetransitions zone γ is smaller or equal to the dimension d1 of the subdomain with the higherdimension
dim(γ) = d1 + d2 − 2 ≤ d1.
Proposition 2.11. The number of product elements in Ωl0γ is up to a constant bounded by
2l0(d1+d2)−2 ≤ 2l0d1 for each level l0, 0 ≤ l0 ≤ L, and (d1, d2) = (2, 1), (2, 2) or (3, 2).
#TD × TS ∈ Ωl0γ . 2l0(d1+d2)−2 ≤ 2l0d1
Proof. The local shape of γ depends entirely on the curvature of ∂D. Therefore, by makingrestrictions concerning the curvature of D, some favorable properties of the resulting transitionzone γ can be guaranteed. In the formulation of the radiative transfer problem (2.1), we set

26 2.4. GRADED SPARSE TENSOR PRODUCT SPACE
the conditions that D is a convex domain with piecewise C2-boundary. As Ωl0γ consists of the
elements adjacent to product elements that intersect with γ, it is sufficient to provide an upperbound for the number of those elements. In what follows, h ≈ 2−l0 will denote the mesh widthof T l0
D as well as T l0S . We now prove the proposition for all three cases of interest separately.
The case (d1, d2) = (2, 1)
As we assume the domain to be convex, away from corners, the slope of γ in the ∂D − S1-representation will be non-negative and - due to the bounded curvature - bounded. At corners,on the other hand, γ will be a vertical line that coincides with a product element edge (Fig.2.5). Therefore, the number of elements that correspond to an element at the boundary of Dand whose interior is intersected by γ is bounded by a constant independent of h. Or, in otherwords, there exists a constant C such that the distance of such an element from γ in verticaldirection is bounded by Ch. Therefore the total number of intersected elements is proportionalto
1
h≈ 2l0 = 2l0(d1+d2−2) ≤ 2d1l0 .
The case (d1, d2) = (2, 2)
Replacing S1 by S2, for a given point x ∈ ∂D, the set of points (x, s) with n(x) · s = 0 is acircle tangential to D (Fig. 2.9). Due to the bounded curvature of ∂D, the two great circles γ(x)corresponding to two neighboring vertices on ∂D (with distance h) can only differ in a azimuthalangle ϕ proportional to h. Therefore, the number of product elements that correspond to an
element abutting the boundary and that are intersected by γ is proportional to1
hand the total
number of intersected elements is proportional to
1
h2≈ 22l0 = 2l0(d1+d2−2) = 2d1l0 .
The case (d1, d2) = (3, 2)
If D is a three-dimensional domain and the curvature of the two-dimensional manifold ∂Dis bounded away from edges and corners, for a given element abutting the boundary on ∂D
the number of product elements that are intersected by γ is again1
h, as the great circles corre-
sponding to points on edges of such an element on ∂D can only differ by an angle proportionalto h (here the axis of the rotation is not necessarily the z-axis). Therefore, the total number ofintersected elements is proportional to
1
h3≈ 23l0 = 2l0(d1+d2−2) = 2d1l0 .
Proposition 2.12. The number of degrees of freedom in a sparse tensor product subspace V l0,L
is up to a constant bounded by (L− l0 + 1)2d1L for 0 ≤ l0 ≤ L:
dim(V l0,L) . (L− l0 + 1)2d1L.
Proof. For every fixed l0 ∈ 0, ..., L, the number of product elements on mesh levels l0 in Ωl0γ is
up to a constant bounded by 2l0d1 (Prop. 2.11). The number of degrees of freedom in a sparsetensor product subspace V l0,L is bounded by the number of product elements on Ωl0
γ multipliedby the number of degrees of freedom in a sparse tensor product space of level L− l0 that is built

CHAPTER 2. SPARSE TENSOR PRODUCT DISCRETIZATION 27
Figure 2.9: Due to the bounded curvature of ∂D, the two great circles γ(x) correspondingto two neighboring vertices on ∂D (with distance h) can only differ in a azimuthal angle ϕproportional to h.
on a single product element TD × TS , TD ∈ T l0D , TS ∈ T l0
S . Taking into account that in all thecases under consideration d1 ≥ d2, a sparse tensor product space on a single product elementwith L− l0 refinement levels contains
. (L− l0 + 1)(2d1(L−l0)
)degrees of freedom. (2.25)
The space V l0,L is a subspace of the union of these O(2l0d1) product element-based sparse tensorproduct spaces. This provides the estimate
dim(V l0,L)(2.25)
≤∑
TD×TS∈Ωl0γ
(L− l0 + 1)(2d1(L−l0)
)
(Prop.2.11)
. 2l0d1(L− l0 + 1)(2d1(L−l0)
)= (L− l0 + 1)2d1L.
Theorem 2.13. The total number of degrees of freedom in the graded sparse tensor productspace V L
G is bounded by L22d1L:
dim(V LG ) ≤ CL22d1L,
with C independent of L.

28 2.4. GRADED SPARSE TENSOR PRODUCT SPACE
Proof. The graded sparse tensor product space is a subspace of the union of sparse tensorproduct subspaces
V LG ⊂
L⋃
l0=0
V l0,L.
Therefore, using Proposition 2.12
dim(V LG ) .
L∑
l0=0
(L− l0 + 1)(2d1L
). L22d1L.
2.4.3 Approximation Properties
The goal of this section is to show that for the cases (d1, d2) = (2, 1) and (2, 2) the graded sparsetensor space (Definition 2.10) has essentially the same approximation properties with respect tothe ‖ ‖S-norm (2.6) as a full approximation for sufficiently smooth functions. The proof forthe case (d1, d2) = (3, 2) is to date open.
In the following, we assume the solution u(x, s) of the RTE to be in the space H2,1(Ω) ∩ V0
and prove that the best-approximation in the graded sparse tensor product space V LG of level L
satisfies
infvL∈bV L
G
||u− vL||S . hL (L+ 1) ||u||H2,1(Ω) (2.26)
The proof will be given in two steps. First we construct an approximation to u that satisfies(2.26) on the subdomain
⋃Ll0=0 Ωl0
γ of Ω. In a second step, we show that the approximation canbe modified in the neighborhood of γ such that the zero inflow boundary conditions are fulfilled,while maintaining the approximation rate in (2.26).
Before discussing these aspects, we define the following sub-domains of Ω (Figs. 2.10 and2.11) and D (Fig. 2.12):
Definition 2.14. (Subdomains Ω, Ωγ1, Ωγ2
and Ωγ of Ω)Ω is the domain that does not intersect with γ on level L
Ω :=
L⋃
l0=0
Ωl0γ
and Ωγ1is the subset of Ω that contains all the product elements on the finest triangulations
that intersect with γ
Ωγ1:= Ω\Ω.
Ωγ2then contains the neighboring elements of Ωγ1
with respect to D (on the finest level):
Ωγ2:= TD × TS , TD ∈ T L
D , TS ∈ T LS ,∃TD × TS ∈ Ωγ1
such that TD and TD
have at least one common vertex.The boundary area Ωγ is then defined as the union of Ωγ1
and Ωγ2:
Ωγ := Ωγ1∪Ωγ2
.
Definition 2.15. (Dγ ,Dγ1,Dγ2
)Based on the definition of Ωγ , we define Dγ ⊂ D as the union of all elements TD ∈ T L
D ,where there exists an element TD × TS , TS ∈ T L
S ∈ Ωγ .Dγi
, i = 1, 2, are defined accordingly with Ωγiinstead of Ωγ .

CHAPTER 2. SPARSE TENSOR PRODUCT DISCRETIZATION 29
Ωγ1
Ωγ2
Ω
∂D
D
ϕ
Figure 2.10: Domain decomposition of Ω along the boundary line γ with Ωγ1(dark blue),
Ωγ2(green) and Ω (light blue).
ΩL−2γ \ΩL−1
γ
ΩL−2γ ∩ ΩL−1
γ
ΩL−1γ \(ΩL
γ ∪ ΩL−2γ )
ΩLγ \(Ωγ2
∪ ΩL−1γ )
Ωγ1
ΩLγ ∩ ΩL−1
γ
Ωγ2γ
D∂D
ϕ
Figure 2.11: Domain decomposition of Ω into (overlapping) sub-domains Ωl0γ , l0 ∈ 0, ..., L,
Ωγ1and Ωγ2
. The subdomain Ωγ is the union of Ωγ1and Ωγ2
.

30 2.4. GRADED SPARSE TENSOR PRODUCT SPACE
Figure 2.12: The sub-domains Dγ1and Dγ2
are contained in the boundary layers L1 (blue) andL2 (green), respectively.
Approximation Properties in Ω
We first apply standard sparse grid approximation techniques to the sub-domains Ωl0γ , 0 ≤ l0 ≤
L. We then show how an approximation to the solution u can be constructed with the sameasymptotic approximation properties that, in addition, satisfies the continuity restrictions acrosssub-domain boundaries.
For each fixed level l0, 0 ≤ l0 ≤ L, and each spherical triangle TS ∈ T l0S , we define a family
of L2(S)-orthogonal projection operators P l0,lTS, l0 ≤ l ≤ L,
P l0,lTS
: L2(TS) −→ S0,0(TS ,T lS)
and a family of nodal interpolation operators P l0,lDTS
, l0 ≤ l ≤ L,
P l0,lDTS
, : H2(DTS) −→ S1,1(DTS
,T lD).
For functions v ∈ H1(TS) and w ∈ H2(DTS) they satisfy
‖v − P l0,lTSv‖L2(TS) . hl ‖v‖H1(TS) ≈ 2−l‖v‖H1(TS) (2.27)
‖w − P l0,lDTS
w‖H1(DTS) . hl ‖w‖H2(DTS
) ≈ 2−l‖w‖H2(DTS), (2.28)
where hl ≈ 2−l is the mesh width of level l.
Based on these operators P l0,lTS
and P l0,lDTS
, 0 ≤ l0 ≤ l ≤ L, we define for each spherical element
TS ∈ T l0S an operator P l0,L
TSon the sub-domain TS ×DTS
.
Definition 2.16. (Subspace Operator P l0,LTS
and Subspace Approximation ul0)

CHAPTER 2. SPARSE TENSOR PRODUCT DISCRETIZATION 31
On each sub-domain TS ×DTS⊂ Ωl0
γ , TS ∈ T l0S , the operator P l0,L
TSis defined as
P l0,LTS
: H1,0(DTS× TS) −→ V l0,L
u(x, s) 7→∑
l0≤lD+lS≤L
(P l0,lD
DTS− P l0,lD−1
DTS
)⊗(P l0,lS
TS− P l0,lS−1
TS
)u(x, s)
and ul0(x, s) := P l0,LTS
u(x, s), (x, s) ∈ Ωl0γ .
Proposition 2.17. If u ∈ H2,1(Ω) then for any l0, 0 ≤ l0 ≤ L, the approximation ul0 as definedabove satisfies
‖u− ul0‖H1,0(Ωl0γ )
. (L− l0 + 1) 2−(L+l0)‖u‖H2,1(Ω
l0γ ).
Proof. The proof follows the standard technique to prove approximation properties of sparsegrids. For any TS ∈ T l0
S
||u− P l0,LTS
u||H1,0(TS×DTS)
= ||∞∑
lD=l0
∞∑
lS=maxl0,L−lD+l0+1
(P l0,lD
DTS− P l0,lD−1
DTS
)⊗(P l0,lS
TS− P l0,lS−1
TS
)u||H1,0(TS×DTS
)
≤ ||L∑
lD=l0
∞∑
lS=L−lD+l0+1
(P l0,lD
DTS− P l0,lD−1
DTS
)⊗(P l0,lS
TS− P l0,lS−1
TS
)u||H1,0(TS×DTS
)
︸ ︷︷ ︸:=I
+ ||∞∑
lD=L+1
∞∑
lS=l0
(P l0,lD
DTS− P l0,lD−1
DTS
)⊗(P l0,lS
TS− P l0,lS−1
TS
)u||H1,0(TS×DTS
)
︸ ︷︷ ︸:=II
For the first part, we have the following estimate:
I = ||L∑
lD=l0
(P l0,lD
DTS− Id+ Id− P l0,lD−1
DTS
)⊗(Id− P l0,L−lD+l0
TS
)u||H1,0(TS×DTS
)
≤L∑
lD=l0
(||(Id− P l0,lD
DTS
)⊗(Id− P l0,L−lD+l0
TS
)u||H1,0(TS×DTS
)
+ ||(Id− P l0,lD−1
DTS
)⊗(Id− P l0,L−lD+l0
TS
)u||H1,0(TS×DTS
)
).
Using (2.27) and (2.28) , we find
‖(Id− P l0,lD−1DTS
)⊗ (Id− P l0,L−lD+l0TS
)u‖ . 2−(L+l0−1)‖u‖H2,1(TS×DTS),
‖(Id− P l0,lDDTS
)⊗ (Id− P l0,L−lD+l0TS
)u‖ . 2−(L+l0)‖u‖H2,1(TS×DTS).
Under the same assumptions, the following estimate holds for the second summand
II = ‖(Id − PLDTS
)⊗ (Id− P l0,l0−1TS
u‖H1,0(TS×DTS) . 2−(L+l0−1)||u||H2,0(TS×DTS
).
The summation over all elements TS ∈ T l0S concludes the proof.
However, as mentioned above, these local approximations cannot directly be used to define anapproximation to the solution u on Ω for two reasons. Firstly, due the fact that the sub-domains

32 2.4. GRADED SPARSE TENSOR PRODUCT SPACE
Ωl0γ for different levels l0 can overlap and as the refinement levels in these subspaces differ, the
function is not well-defined. Secondly, the subspace approximations are not continuous withrespect to D across domain boundaries of the sub-domains Ωl0
γ .The first problem is easy to fix by defining the graded sparse tensor product projection u on
Ω as follows:
Definition 2.18. (The Graded Sparse Tensor Product Projection u)In any point (x, s) ∈ Ω, u(x, s) is defined as the approximation in the most refined sub-domainΩl0
γ that contains (x, s):
u(x, s) := ul(x, s), l = maxl0; (x, s) ∈ Ωl0γ . (2.29)
However, the discontinuities with respect to D across sub-domain boundaries
∂Ωlγ ∩ ∂
(Ωl−1
γ \Ωlγ
), l = 1, ..., L, (Fig. 2.13)
remain.
ΩL−2γ \ΩL−1
γ
ΩL−2γ ∩ ΩL−1
γ
ΩL−1γ \(ΩL
γ ∪ ΩL−2γ )
ΩLγ \(Ωγ2
∪ ΩL−1γ )
Ωγ1
ΩLγ ∩ ΩL−1
γ
Ωγ2γ
D∂D
ϕ
Figure 2.13: Discontinuities with respect to D can occur across sub-domain boundaries ∂Ωlγ ∩
∂(Ωl−1
γ \Ωlγ
), l = 1, ..., L (marked by dashed red lines).
We now remove the parts from u(x, s) that contribute to discontinuities across the boundaries∂Ωl
γ ∩ ∂(Ωl−1
γ \Ωlγ
), l = 1, ..., L, and prove that this reduced graded sparse tensor product
approximation ur satisfies the desired approximation properties
‖ur‖H1,0(Ω) . (L+ 1)2−L‖u‖H2,1(Ω).
In sparse tensor product subspace V l−1,L the coarsest spaces in the hierarchy of function spacesare defined on the meshes of level l − 1 and for every (x, s) ∈ Ωl−1
γ \Ωlγ (with TS ∈ T l−1
S suchthat s ∈ TS)
u(x, s) = ul−1(x, s) =∑
l−1≤lD ,lS≤LlD+lS≤L+l−1
(P l−1,lD
DTS− P l−1,lD−1
DTS
)⊗(P l−1,lS
TS− P l−1,lS−1
TS
)u(x, s). (2.30)

CHAPTER 2. SPARSE TENSOR PRODUCT DISCRETIZATION 33
In the sparse tensor product subspace V l,L on Ωl, however, the coarsest spaces in the hierarchyof function spaces are defined on the meshes of level l and for every (x, s) ∈ Ωl
γ\Ωl+1γ (with
TS ∈ T lS such that s ∈ TS)
u(x, s) = ul(x, s) =∑
l≤lD,lS≤LlD+lS≤L+l
(P l,lD
DTS− P l,lD−1
DTS
)⊗(P l,lS
TS− P l,lS−1
TS
)u(x, s). (2.31)
The same function ul(x, s) as in (2.31) can be expressed by hierarchical spaces with coarsestlevel l − 1 on D × S that are restricted to (x, s) ∈ Ωl
γ
u(x, s) = ul(x, s) =∑
l−1≤lD,lS≤LlD+lS≤L+l
(P l−1,lD
DTS− P l−1,lD−1
DTS
)⊗(P l−1,lS
TS− P l−1,lS−1
TS
)u(x, s). (2.32)
Comparing (2.30) with (2.32), it becomes obvious that the discontinuities arise from the contri-butions
∑
l−1≤lD,lS≤LlD+lS=L+l
(P l−1,lD
DTS− P l−1,lD−1
DTS
)⊗(P l−1,lS
TS− P l−1,lS−1
TS
)u(x, s) (2.33)
in the finer space. Removing these contributions would lead to problems at the interface to thenext finer space on Ωl+1. Therefore, we will alter (2.33) such that its trace on any sub-domainTS × El ⊂ ∂Ωl ∩ ∂ (Ωl−1\Ωl), where El is an edge on T l
D and TS an element on T lS, vanishes,
while its trace on any sub-domain TS × El+1 ⊂ ∂Ωl+1 ∩ ∂ (Ωl\Ωl+1) remains unchanged.
We denote by uL+llD,lS
(x, s) the contributions to (2.33) on levels (lD, lS)
uL+llD ,lS
(x, s) :=(P l−1,lD
DTS− P l−1,lD−1
DTS
)⊗(P l−1,lS
TS− P l−1,lS−1
TS
)u(x, s) (2.34)
and first consider the coarsest level with respect to D of these increments
uL+ll,L (x, s) =
(P l−1,l
DTS− P l−1,l−1
DTS
)⊗(P l−1,L
TS− P l−1,L−1
TS
)u(x, s). (2.35)
As(P l−1,l
DTS− P l−1,l−1
DTS
)v(x) only contains the hierarchical surplus of level l and we use linear
interpolation with respect to D, for any s ∈ TS , uL+ll,L (x, s) = 0 for all x that correspond to a
vertex of T l−1D .
Let dL+ll,L (x, s) denote the function that is continuous and piecewise linear on T l
D and piecewise
constant on T LS and satisfies
dL+ll,L (v, s) =
uL+l
l,L (v, s) ∀(v, s) ∈ El × TS ⊂ ∂Ωl ∩ ∂ (Ωl−1\Ωl)
0, ∀(v, s) /∈ El × TS ⊂ ∂Ωl ∩ ∂ (Ωl−1\Ωl) ,(2.36)
where v is a vertex of T lD. With this function dL+l
l,L (x, s) we capture all the discontinuities of
u = ul across ∂Ωl ∩ ∂ (Ωl−1\Ωl) that come from the contribution uL+ll,L (x, s). For dL+l
l,L we havethe following estimate:
Lemma 2.19. For TS ∈ T lS
‖dL+ll,L ‖H1,0(Ωl
γ) . ‖uL+ll,L ‖H1,0(Ωl
γ).

34 2.4. GRADED SPARSE TENSOR PRODUCT SPACE
Ωl−1γ
Ωlγ
0
0 0
∂D
γ(TS)
T1
T2
T3
T4T5
T6
T7
Figure 2.14: For any s ∈ TS, uL+ll,L (x, s) = 0 for all x that correspond to a vertex of T l−1
D . A
triangle in the support of dL+ll,L is said to be of type 1 (labeled in yellow), if it has one vertex
v with uL+ll,L (v, s) = 0. The domain Ωl
γ is marked in blue, the boundary of the domain Ωl−1γ in
purple and edges El on which (2.33) is changed with dashed red lines.
Proof. The support of dL+ll,L (x, s) is restricted to product elements adjacent to ∂Ωl∩∂ (Ωl−1\Ωl).
There are two types of triangles of level l in physical space in the support of dL+ll,L : a triangle
TD of type 1 has one vertex v with uL+1l,L (v, s) = 0 (e.g. T1, T3, T4, T5, T7 in Fig. 2.14), whereas
a triangle of type 2 has no vertex v, where uL+1l,L (v, s) is guaranteed to be zero (e.g. T2, T6 in
Fig 2.14).Consider now the gradients ∇xu
L+1l,L (x, s) and ∇xd
L+1l,L (x, s) on these triangles. If triangle
TD is of type 1 then
|∇xuL+1l,L (x, s)| ≈ max
i=1,2,3|uL+1
l,L (vi, s)|h−1l ,
for (x, s) ∈ TD × TS , where vi is vertex of TD and
|∇xdL+1l,L (x, s)| . max
i=1,2,3|uL+1
l,L (vi, s)|h−1l ,
for (x, s) ∈ TD × TS , where vi is vertex of TD with (vi, s) ∈ ∂Ωl ∩ ∂ (Ωl−1\Ωl) . As
|dL+1l,L | ≤ |uL+1
l,L | for all (x, s) ∈ TD × TS
we have that
‖dL+1l,L ‖2H1,0(TD×TS) . ‖uL+1
l,L ‖2H1,0(TD×TS).
If TD is of type 2, then there exists for each s ∈ TS an adjacent triangle T of type 1 suchthat T × TS ∈ Ωl
γ with
arg max(vi,s)∈TD×TS
|uL+1l,L (vi)|

CHAPTER 2. SPARSE TENSOR PRODUCT DISCRETIZATION 35
as a vertex. (As triangles of type 2 are the middle triangles of the next coarser triangles, alltriangles they share an edge with are of type 1 and as Dl
γ contains at least two triangles, theabove statement is always true.)
Therefore, we have that
‖dL+1l,L (., s)‖H1(TD) . ‖uL+1
l,L (., s)‖H1(T ) ∀ s ∈ TS ,
which leads to
‖dL+1l,L ‖2H1,0(TD×TS) . ‖uL+1
l,L ‖2H1(T×TS).
As the number of neighbors to a triangle TD of type 1 is bounded by a constant, summationover all product elements in TD × TS ∈ Ωl
γ results in
‖dL+1l,L ‖2H1,0(Ωl
γ) . ‖uL+1l,L ‖2H1,0(Ωl
γ ).
For the discontinuity contributions in (2.34) with lD > l, we define for l = l + 1, ..., L the
functions dL+l
l,L+l−l(x, s) on Ωl
γ that are continuous and piecewise linear on T lD and piecewise
constant on T L+l−lS and satisfy
dL+l
l,L+l−l(v, s) =
uL+l
l,L+l−l(v, s) ∀(v, s) ∈ El × TS ⊂ ∂Ωl ∩ ∂ (Ωl−1\Ωl)
0, ∀(v, s) /∈ El × TS ⊂ ∂Ωl ∩ ∂ (Ωl−1\Ωl) .
Lemma 2.20. For any l = l + 1, ..., L, l ≤ L
‖dL+ll,L+l−l
‖H1,0(Ωlγ) . ‖uL+l
l,L+l−l‖H1,0(Ωl
γ).
Ωl−1γ
Ωlγ
0
00
0
0
∂D
γ(TS)
Figure 2.15: As uL+l
l,L+l−lcontains the surplus of level l > l with respect to D, uL+l
l,L+l−lis zero at
every second vertex of mesh level l.

36 2.4. GRADED SPARSE TENSOR PRODUCT SPACE
Proof. As uL+l
l,L+l−lcontains the surplus of level l > l with respect to D, uL+l
l,L+l−lis zero at every
second vertex of mesh level l (Fig. 2.15). Therefore, the analogous arguments as in Lemma 2.19can be applied to uL+l
l,L+l−l(x, s) and dL+l
l,L+l−l(x, s), which concludes the proof.
We now define the reduced sparse tensor product approximation ur(x, s) by subtracting thediscontinuous contributions from the subspace contributions ul in Definition 2.16.
Definition 2.21. (Reduced Graded Sparse Tensor Product Approximation ur)For (x, s) ∈ Ωl
γ\Ωl+1γ , the reduced graded sparse tensor product approximation ur is defined
as
ur(x, s) := ul(x, s) −L∑
l=l
dL+ll,L+l−l
(x, s).
As the domains Ωlγ\Ωl+1
γ , l = 0, ..., L do not overlap, the following holds: For (x, s) ∈ Ω
ur(x, s) := u(x, s) −L∑
l=0
L∑
l=l
dL+ll,L+l−l
(x, s).
Before stating the theorem that ensures convergence of the best-approximation in Ω withthe desired rate, we prove the following lemma about the approximation properties of ul in thedomain Ωl
γ ∩ Ωl−1γ :
Lemma 2.22. For u ∈ H2,1(Ω) and ul as in Definition 2.29
‖u− ul‖2H1,0(Ωlγ∩Ωl−1
γ ). ‖u− ul−1‖2H1,0(Ωl
γ∩Ωl−1γ )
+((L− l)2−(L+l)
)2‖u‖2
H2,1(Ωlγ∩Ωl−1
γ ).
Proof. On every product element TD × TS on mesh level l with TD × TS ⊂ Ωlγ ∩Ωl−1
γ ul can berepresented with respect to bases with coarsest level l as well as coarsest level l − 1
ul(x, s) = ul−1(x, s) +∑
l−1≤lD,lS≤LlD+lS=L+l
(P l−1,lD
DTS− P l−1,lD−1
DTS
)⊗(P l−1,lS
TS− P l−1,lS−1
TS
)u(x, s).
With the triangle inequality and the approximation properties of the operators P l0,lTS
and P l0,lDTS
(2.27) and (2.28)
‖u− ul‖H1,0(TD×TS) ≤ ‖u− ul−1‖H1,0(TD×TS)
+∑
l−1≤lD ,lS≤LlD+lS=L+l
‖(P l−1,lD
DTS− P l−1,lD−1
DTS
)⊗(P l−1,lS
TS− P l−1,lS−1
TS
)u‖H1,0(TD×TS)
. ‖u− ul−1‖H1,0(TD×TS) + (L− l + 1)2−(L+l)‖u‖H2,1(TD×TS).
Therefore
‖u− ul‖2H1,0(TD×TS) . ‖u− ul−1‖2H1,0(TD×TS) +((L− l + 1)2−(L+l)
)2 ‖u‖2H2,1(TD×TS).
Summation over all product elements in Ωlγ ∩ Ωl−1
γ concludes the proof.
Theorem 2.23. The reduced approximation ur(x, s) in Definition 2.21 is continuous with respectto D and satisfies
‖u− ur‖H1,0(Ω) . (L+ 1)2−L‖u‖H2,1(Ω).

CHAPTER 2. SPARSE TENSOR PRODUCT DISCRETIZATION 37
Proof. Continuity is clear by construction. For the approximation properties, we consider forevery TS × TD ∈ Ωl
γ and lD ≥ l the function uL+llD ,L+l−lD
and estimate
‖uL+llD ,L+l−lD
‖H1,0(TS×TD)
= ‖(P l−1,lD
DTS− P l−1,lD−1
DTS
)⊗(P l−1,L+l−lD
TS− P l−1,L+l−lD−1
TS
)u‖H1,0(TS×TD)
. 2−(L+l)‖u‖H2,1(TS×TD).
Using Lemma 2.20, we obtain that
‖dL+ll,L+l−l
‖H1,0(Ωlγ\Ω
l+1γ ) . ‖uL+l
l,L+l−l‖H1,0(Ωl
γ\Ωl+1γ ) . 2−(L+l)‖u‖H2,1(Ωl
γ).
For the sum of the discontinuous contributions on the sub-domain Ωlγ\Ωl+1
γ , we apply the triangleinequality and obtain the estimate
‖L∑
l=l
dL+ll,L+l−l
‖H1,0(Ωlγ\Ω
l+1γ ) ≤
L∑
l=l
‖dL+ll,L+l−l
‖H1,0(Ωlγ\Ω
l+1γ )
. (L− l + 1)2−(L+l)‖u‖H2,1(Ωlγ).
Now, we subdivide each sub-domain Ωlγ into two parts
Ωlγ =
(Ωl
γ\Ωl−1γ
)∪(Ωl
γ ∩ Ωl−1γ
).
On sub-domains Ωlγ\Ωl−1
γ we can apply the sparse tensor approximation estimate (Proposition2.17)
‖u− ul‖2H1,0(Ωlγ\(
S
l<lΩl
γ)).((L− l + 1)2−(L+l)
)2‖u‖2
H2,1(Ωlγ\(
S
l<lΩl
γ)).
On Ωlγ ∩ Ωl−1
γ we can estimate the error of sparse tensor product approximation of level l bythe error of the coarser sparse tensor product approximation ul−1 plus a term that contains thesolution u (Lemma 2.22)
‖u− ul‖2H1,0(Ωlγ∩Ωl−1
γ )≤ ‖u− ul−1‖2H1,0(Ωl
γ∩Ωl−1γ )
+((L− l + 1)2−(L+l)
)2‖u‖2
H2,1(Ωlγ∩Ωl−1
γ ).
For the estimate of ‖u− u‖H1,0(Ω), we make use of the fact that - due to the refinement property
of the sub-domains Ωlγ , l = 0, ..., L, towards the transition region γ - Ω can be decomposed in
the two ways
Ω =
L⋃
l=0
(Ωl
γ\Ωl−1γ
)=
L⋃
l=0
(Ωl
γ\Ωl+1γ
)
with Ω−1γ = ΩL+1
γ = ∅ and introduce the set of non-overlapping sub-domains of the commonrefinement of
(Ωl
γ\Ωl+1γ
)and
(Ωl
γ\Ωl−1γ
), l = 0, ..., L,
which we denote by S(Ω)
S(Ω) := ω; either ω =(Ωl
γ\Ωl+1γ
)∩ Ωl−1
γ or ω =(Ωl
γ\Ωl+1γ
)\Ωl−1
γ , 0 ≤ l ≤ L.

38 2.4. GRADED SPARSE TENSOR PRODUCT SPACE
Then, applying the triangle and Young’s inequality,
‖u− ur‖2H1,0(Ω)
=∑
ω∈S(Ω)
‖u− (u−L∑
l=0
L∑
l=l
dL+ll,L+l−l
)‖2H1,0(ω)
.∑
ω∈S(Ω)
‖u− u‖2H1,0(ω)
︸ ︷︷ ︸:=I
+∑
ω∈S(Ω)
‖L∑
l=0
L∑
l=l
dL+l
l,L+l−l‖2H1,0(ω)
︸ ︷︷ ︸:=II
.
For part I, we proceed level-wise starting from the finest level and use that u = uL on ΩLγ \ΩL−1
γ .Applying Lemma 2.22, we obtain
I = ‖u− uL‖2H1,0(ΩLγ \ΩL−1
γ )+ ‖u− uL‖2H1,0(ΩL
γ ∩ΩL−1γ )
+∑
ω∈S(Ω)
ω⊂Ω\ΩLγ
‖u− u‖2H1,0(ω)
. ‖u− uL‖2H1,0(ΩLγ \ΩL−1
γ )+ ‖u− uL−1‖2H1,0(ΩL
γ ∩ΩL−1γ )
+(2−2L
)2 ‖u‖2H2,1(ΩL
γ ∩ΩL−1γ )
+∑
ω∈S(Ω)
ω⊂Ω\ΩLγ
‖u− u‖2H1,0(ω)
= ‖u− uL‖2H1,0(ΩLγ \ΩL−1
γ )+(2−2L
)2 ‖u‖2H2,1(ΩL
γ ∩ΩL−1γ )
+ ‖u− uL−1‖2H1,0(ΩL−1γ \ΩL−2
γ )+ ‖u− uL−1‖2H1,0(ΩL−1
γ ∩ΩL−2γ )
+∑
ω∈S(Ω)
ω⊂Ω\(ΩLγ ∪ΩL−1
γ )
‖u− u‖2H1,0(ω)
. ‖u− uL‖2H1,0(ΩLγ \ΩL−1
γ )+(2−2L
)2 ‖u‖2H2,1(ΩL
γ ∩ΩL−1γ )
+ ‖u− uL−1‖2H1,0(ΩL−1γ \ΩL−2
γ )
+ ‖u− uL−2‖2H1,0(ΩL−1γ ∩ΩL−2
γ )+(2 · 2−2L+1
)2 ‖u‖2H2,1(ΩL−1
γ ∩ΩL−2γ )
+∑
ω∈S(Ω)
ω⊂Ω\(ΩLγ ∪ΩL−1
γ )
‖u− u‖2H1,0(ω)
=L∑
l=L−1
(‖u− ul‖2H1,0(Ωl
γ\Ωl−1γ )
+((L− l + 1)2−L−l
)2‖u‖2
H2,1(Ωlγ∩Ωl−1
γ )
)
+ ‖u− uL−2‖2H1,0(ΩL−1γ ∩ΩL−2
γ )+
∑
ω∈S(Ω)
ω⊂Ω\(ΩLγ ∪ΩL−1
γ )
‖u− u‖2H1,0(ω).
Proceeding in the same way on levels L − 2, L − 3, ..., 0, and applying Proposition 2.17, weobtain
I .
L∑
l=0
‖u− ul‖2H1,0(Ωlγ\Ω
l−1γ )
+
L∑
l=0
((L− l + 1)2−(L+l)
)2‖u‖2
H2,1(Ωlγ∩Ωl−1
γ )
.
L∑
l=0
((L− l + 1)2−(L+l)
)2‖u‖2
H1,0(Ωlγ\Ω
l−1γ )
+ (L+ 1)2‖u‖2H1,0(Ω)
L∑
l=0
(2−(L+l))2
. (L+ 1)22−2L‖u‖2H1,0(Ω)
.

CHAPTER 2. SPARSE TENSOR PRODUCT DISCRETIZATION 39
For part II, we have
II =∑
ω∈S(Ω)
‖L∑
l=0
L∑
l=l
dL+l
l,L+l−l‖2H1,0(ω) .
L∑
l=0
‖L∑
l=l
dL+l
l,L+l−l‖2
H1,0(Ωlγ\Ω
l+1γ )
.
L∑
l=0
((L− l + 1)2−L−l‖u‖H2,1(Ωl
γ)
)2.((L+ 1)2−L
)2 ‖u‖H2,1(Ω).
Therefore,
‖u− ur‖2H1,0(Ω)
. (L+ 1)22−2L‖u‖2H2,1(Ω)
.
Approximation Properties in the Neighborhood of γ
In order to prove the desired approximation rate in the whole domain Ω, we construct anapproximation u in the neighborhood of γ that is continuous and piecewise linear on T L
D andpiecewise constant on T L
S and strongly satisfies the zero inflow boundary conditions
u|Γ−= 0.
Furthermore, we require u(x, s) to be equal to u(x, s) for any s ∈ int(TS), TS ∈ T LS with
(x, s) ∈ ∂(Ωγ) ∩ Ω. The reduced boundary approximation, with the detail function d2LL,L as
defined in (2.36),
ur := u− d2LL,L
then satisfies the continuity condition with respect to physical space D which is that for any
s ∈ int(TS), TS ∈ T LS , the traces of ur(., s) and ur(., s) with respect to D ⊂ ∂(Ωγ) ∩ Ω are
identical.
As
‖u− ur‖S(Ωγ ) ≤ ‖u‖S(Ωγ ) + ‖u‖S(Ωγ) + ‖d2LL,L‖S(Ωγ)
≤ ‖u‖H1,0(Ωγ) + ‖u‖S(Ωγ ) + ‖d2LL,L‖H1,0(Ωγ ) (2.37)
and
‖d2LL,L‖H1,0(Ωγ) = ‖d2L
L,L‖H1,0(Ωγ2) . 2−2L‖u‖H2,1(Ωγ2
) ≤ 2−2L‖u‖H2,1(Ω),
it is sufficient to prove that
‖u‖H1,0(Ωγ ) . hL‖u‖H2,1(Ω) and (2.38)
‖u‖S(Ωγ ) . hL‖u‖H2,1(Ω). (2.39)
As the boundary approximation u will be contained in the graded sparse tensor product spaceV L
G , restricted to the domain Ωγ , the combined approximation will be in V LG and the bounds for
the number of degrees of freedom for the graded sparse tensor product space will remain valid.
We will first give the proofs for the case (d1, d2) = (2, 1), which can be seen as the reduceddiscretization in solid angle with s = (cosϕ sin ϑ, sinϕ sinϑ, cos ϑ)T with ϑ = π
2 . We thenextend the ideas to the (d1, d2) = (2, 2) case.

40 2.4. GRADED SPARSE TENSOR PRODUCT SPACE
T 0D
TD
ITD
x
Ix
~ξT 0D
Figure 2.16: Each element TD ∈ T 0D near the boundary is extended within the domain D along
a direction ~ξT 0D
to a sub-domain ITDof D.
The case (d1, d2) = (2, 1)
We first provide the estimate for the exact solution in the boundary zone Ωγ (2.38) beforeconstructing the boundary approximation u. To this end, based on the triangulations T 0
D andT L
D , we define some auxiliary terms and some sub-domains of D:
Definition 2.24. (~ξT 0D, u,ξ, Ix, ITD
)
For each triangle T 0D on the coarsest mesh T 0
D, we define a direction ~ξT 0D
into the (convex)
domain D (Fig. 2.16). u,ξ then denotes the partial derivative of u into the direction of ~ξT 0D.
For any x ∈ T 0D, Ix is the straight line through x in the direction of ~ξT 0
Dwithin D and ITD
is the union of all Ix,x ∈ TD ⊂ T 0D.
ITD:=
⋃
x∈TD
Ix ⊂ D
For the proof of Theorem 2.27 later on, we state two lemmata.
Lemma 2.25. For any function v ∈ H1,1(Ωγ) and TD × I ∈ Ωγ with TD ∈ T 0D, I ∈ T L
S ,
‖v‖L2(TD×I) . hL‖v‖H1,1(ITD×S1),
where hL is the mesh width of T LS and T L
D .
Proof. For any function v ∈ H1,1(Ωγ), we can, for almost all (x, ϕ) ∈ Ωγ with x ∈ T 0D, apply
the multiplicative trace inequality into the direction of ~ξT 0D. We then obtain
|v(x, ϕ)|2 ≤ ‖v(., ϕ)‖L2(Ix)‖v(., ϕ)‖H1(Ix)
≤ ‖v(., ϕ)‖2H1(Ix).

CHAPTER 2. SPARSE TENSOR PRODUCT DISCRETIZATION 41
Integration over the triangle TD ∈ T LD with mesh width hL then results in
∫
TD
|v(x, ϕ)|2 dx . hL‖v(., ϕ)‖2H1(ITD)
for almost all ϕ ∈ S1. In the same way, we can proceed with ‖v(., ϕ)‖2H1(ITD) as a function of
the solid angle ϕ and apply the multiplicative trace inequality into the direction of ϕ
‖v(., ϕ)‖2H1(ITD) . ‖v‖2H1,1(ITD
×S1).
After integration over the interval I ∈ T LS with mesh width hL, we obtain
‖v‖2H1,0(ITD×I) . hL‖v‖2H1,1(ITD
×S1).
Therefore
‖v‖2L2(TD×I) =
∫
I
∫
TD
|v(x, ϕ)|2 dx dϕ .
∫
IhL‖v(., ϕ)‖2H1(ITD
) dϕ
= hL‖v(., ϕ)‖2H1,0(ITD×I) . h2
L‖v,ϕ‖2H1,1(ITD×S1).
Lemma 2.26. For any triangle TD ∈ Dγ , the number of product elements TD× I, I ∈ T LS , that
are contained in Ωγ, are bounded by a constant, independent of L.
Proof. For any element TD ∈ Dγ2, the number of product elements TD× I in Ωγ2
is bounded bythe number of product element TD×I in Ωγ1
, where TD and TD share at least one vertex. As thenumber of such neighbors TD is bounded independently of the refinement level L, it is sufficientto show that for any triangle TD ∈ Dγ , the number of product elements TD × I, I ∈ T L
S , thatare contained in Ωγ1
, are bounded by a constant independent of L. The product elements inΩγ1
are the ones that are intersected by γ. As each triangle TD ∈ Dγ1has only one boundary
edge and the curvature of the boundary is bounded, the number of solid angle intervals I suchthat TD × I is contained in Ωγ1
is bounded.
Theorem 2.27. If u ∈ H2,1(Ω), then
‖u‖H1,0(Ωγ) . hL‖u‖H2,1(Ω).
Proof. In order to obtain an estimate for
‖u‖2H1,0(TD×I) =
∫
TD×I
(u2
,x + u2,y + u2
)dϕdx
for all product elements TD × I ∈ Ωγ , we can apply Lemma 2.25 as u,x, u,y and u,ϕ are inH1,1(Ωγ), and obtain
‖u‖2H1,0(TD×I) . h2L‖u‖2H2,1(ITD
×S1).
As stated in Lemma 2.26, the number of product elements in Ωγ that share the same elementTD on T L
D is bounded by a constant. Therefore
‖u‖2H1,0((TD×S1)∩Ωγ ) . h2L‖u‖2H2,1(ITD
×S1).

42 2.4. GRADED SPARSE TENSOR PRODUCT SPACE
As Dγ only contains two boundary layers of triangles, the number of triangles TD, TD ∈ Dγ ,whose extended areas ITD
overlap, is bounded by a constant independent of the refinement level.Adding the contributions of all elements on Ωγ ∩ (T 0
D × S1) yields
‖u‖2H1,0((T 0D×S1)∩Ωγ ) . h2
L‖u‖2H2,1(IT0
D×S1) . h2
L‖u‖2H2,1(Ω).
Summing up the integrals corresponding to the constant number of elements along the boundaryof T 0
D, we finally obtain
‖u‖H1,0(Ωγ) . hL‖u‖H2,1(Ω).
We now construct an approximation u to u ∈ H2,1(Ω) ∩ V0 in the sub-domain Ω\Ωγ1by
averaging u with respect to solid angle and linearly interpolating it with respect to physicalspace on the sub-domain Ω\Ωγ1
. In order to obtain a function that is defined everywhere in Ω,u is linearly extended with respect to D to zero at the neighboring vertices in Ωγ1
. Let vi be avertex on T L
D and Ij and interval on T LS . Then for ϕ ∈ Ij, u(x, ϕ) is the continuous, piecewise
linear function with respect to T LD with vertex values
uij := u(vi, ϕ) =
1
|Ij |
∫Iju(vi, ϕ) dϕ, (vi, ϕ) /∈ Ωγ1
0, otherwise.(2.40)
We now want to estimate the second term in (2.37) and prove that
‖u‖S(Ωγ ) . hL‖u‖H2,1(Ω).
As u|Ωγ1= 0, we can restrict ourselves to the sub-domain Ωγ2
. The proof is divided into several
sub-steps. First, we give an estimate for the partial derivative along an edge of T LD , then upper
bounds for the vertex values uij near γ and the L2-norms of u, ∇xu and s · ∇xu over a productelement TD × Ij are provided. This is followed by several lemmata leading to an estimate forthe difference of u at neighboring vertices |ui1j − ui2j | and the final proof of the theorem.
Lemma 2.28. Let TD be a triangle on D ⊂ R2, e an edge of TD of length hL and I an interval of
length hL and let (ξ, η) be local coordinates such that ξ is parallel to the edge e and η perpendicularto it.
Then for u ∈ H2,1(Ω)
1
|I|
∫
I
∫
e|u,ξ(ξ, η, ϕ)| dξ dϕ
.(h−1
L ||u,ξ||L2(TD×I) + ||∇u,ξ||L2(TD×I)
)1/2 ||u,ξ||1/2L2(TD×I)
,
where ∇ := (∂ξ , ∂η)T .

CHAPTER 2. SPARSE TENSOR PRODUCT DISCRETIZATION 43
Proof.
1
|I|
∫
I
∫
e|u,ξ(., ϕ)| dξ dϕ ≤ h1/2
L
1
|I|
∫
I‖u,ξ(., ϕ)‖L2(e) dϕ
. h−1/2L
∫
I
((h−1
L ||u,ξ(., ϕ)||L2(TD) + ||∇u,ξ(., ϕ)||L2(TD))||u,ξ(., ϕ)||L2(TD)
)1/2dϕ
. h−1/2L
(∫
I
(h−1
L ||u,ξ(., ϕ)||L2(TD) + ||∇u,ξ(., ϕ)||L2(TD)
)dϕ
)1/2
·(∫
I||u,ξ||L2(TD) dϕ
)1/2
. h−1/2L
((∫
Ih−1
L ||u,ξ(., ϕ)||L2(TD) dϕ
)+
(∫
I||∇u,ξ(., ϕ)||L2(TD) dϕ
))1/2
·(∫
I||u,ξ(., ϕ)||L2(TD) dϕ
)1/2
.
((∫
Ih−2
L ||u,ξ(., ϕ)||2L2(TD) dϕ
)1/2
+
(∫
I||∇u,ξ(., ϕ)||2L2(TD) dϕ
)1/2)1/2
·(∫
I||u,ξ(., ϕ)||2L2(TD) dϕ
)1/4
=(h−1
L ||u,ξ||L2(TD×I) + ||∇u,ξ||L2(TD×I)
)1/2 ||u,ξ||1/2L2(TD×I)
Lemma 2.29. Let (vi, Ij) be an edge on Ωγ2∩ Ω and uij defined as in (2.40). Then
|uij | . h1/2L
(‖u‖H2,1(D×Ij) + ‖u‖H2,1(ITD
×S1)
),
where TD is a triangle of edge length 2hL that contains vi as well as a point on ∂D.
Proof. u ∈ H2,1(Ω) implies that u is continuous with respect to space as well as solid angle.Therefore, point values are well-defined.
As dist ((vi, ϕ), γ) . hL for every ϕ ∈ Ij , there exists (v0, ϕ0) ∈ ∂Ω such that u(v0, ϕ0) = 0and ‖vi − v0‖2 . hL, ‖ϕ − ϕ0‖2 . hL, where ‖a − b‖2 is shortest path from a to b on D orSd2 , respectively.
Then, we can estimate the average of |u(vi, ϕ)| over Ij by expressing u(vi, ϕ) for ϕ ∈ Ij withline integrals along edges of product elements (Fig. 2.17)
u(vi, ϕ) = u(v0, ϕ0) +
∫ ϕ
ϕ0
u,ϕ(v0, ϕ) dϕ+
∫
[v0,vi]u,ξ(ξ, η, ϕ) dξ,
where [v0,vi] denotes the edge between the vertices v0 and vi, ξ the local coordinate along theedge and η the local coordinate perpendicular to it. Then
1
|Ij |
∫
Ij
|u(vi, ϕ)| dϕ ≤ 1
|Ij |
∫
Ij
(|u(v0, ϕ0)|+
∫ ϕ
ϕ0
|u,ϕ(v0, ϕ)| dϕ
+
∫
[v0,vi]|u,ξ(ξ, η, ϕ)| dξ
)dϕ
. h1/2L ‖u,ϕ(v0, .)‖L2(Ij)
+1
|Ij |
∫
Ij
∫
[v0,vi]|u,ξ(ξ, η, ϕ)| dξ.

44 2.4. GRADED SPARSE TENSOR PRODUCT SPACE
vi
v0
u = 0
∂D
ξ
ϕ
(v0, ϕ0)
(vi, ϕ0)
Ei = [v0,vi] (vi, ϕ0 + ϕ)
γ
Figure 2.17: u(vi, ϕ) can be expressed by a line integral along the boundary of an elementTD × Ij (blue arrow) that intersects with γ (red line).
For the first part, we can use the crude estimate (Sobolev embedding)
|u,ϕ(v0, ϕ)|2 . ‖u,ϕ(., ϕ)‖2H2(D).
For the second part, we apply in the first step Lemma 2.28 and in the second step Lemma 2.25
1
|Ij|
∫
Ij
∫
[v0,vi]|u,ξ(ξ, η, ϕ)| dξ dϕ
.(h−1
L ||u,ξ||L2(TD×Ij) + ||∇u,ξ||L2(TD×Ij)
)1/2||u,ξ||1/2
L2(TD×Ij)
.(h−1
L hL‖u,ξξϕ‖L2(ITD×S1) + h
1/2L ||∇u,ξϕ||L2(TD×S1)
)1/2h
1/2L ‖u,ξξϕ‖1/2
L2(ITD×S1)
. h1/2L ‖u‖H2,1(ITD
×S1).
Therefore
|uij | ≤1
|Ij |
∫
Ij
|u(vi, ϕ)| dϕ . h1/2L
(‖u‖H2,1(D×Ij) + ‖u‖H2,1(ITD
×S1)
).
Lemma 2.30. Let TD ∈ T LD be a triangle of edge length hL and Ij an interval of length hL such
that TD × Ij is contained in Ωγ2. With vi, i = 1, 2, 3 being the vertices of TD and u as defined
in 2.40 , the following holds:
‖u‖2L2(TD×Ij). h4
L
(‖u‖2H2,1(D×Ij)
+ ‖u‖2H2,1(ITD×S1)
)
‖∇xu‖2L2(TD×Ij). h2
L
(‖u‖2H2,1(D×Ij)
+ ‖u‖2H2,1(ITD×S1)
).

CHAPTER 2. SPARSE TENSOR PRODUCT DISCRETIZATION 45
Proof. We can apply simple scaling arguments as follows: As the function u is linear with respectto TD and constant with respect to Ij , |u| and |∇xu| are bounded on TD
|u| ≤ maxi∈1,2,3
|uij |
|∇xu| . maxi∈1,2,3
|uij |h−1L .
When integrating the squares over the product domain TD × Ij and applying Lemma 2.29, weobtain
‖u‖2L2(TD×Ij). h3
L maxi∈1,2,3
|uij |2 . h4L
(‖u‖H2,1(D×Ij) + ‖u‖H2,1(ITD
×S1)
)2
. h4L
(‖u‖2H2,1(D×Ij)
+ ‖u‖2H2,1(ITD×S1)
)
‖∇xu‖2L2(TD×Ij). h1
L maxi∈1,2,3
|uij |2 . h2L
(‖u‖H2,1(D×Ij) + ‖u‖H2,1(ITD
×S1)
)2
. h2L
(‖u‖2H2,1(D×Ij)
+ ‖u‖2H2,1(ITD×S1)
).
When estimating ‖u‖2H1,0(Ωγ2) by adding the contributions from the product elements TD ×
Ij ∈ Ωγ2, using Lemma 2.30, we get
‖u‖2H1,0(Ωγ2) =
∑
TD×Ij∈Ωγ2
h2L
(‖u‖2H2,1(D×Ij)
+ ‖u‖2H2,1(ITD×S1)
)
. h2L
∑
TD×Ij∈Ωγ2
‖u‖2H2,1(D×Ij)+ ‖u‖2H2,1(Ω)
,
where we used Lemma 2.26 in the last step. Unless the curvature of D is bounded from below,for a fixed interval Ij the number product elements TD × Ij ∈ Ωγ2
can scale as h−1L . Therefore,
the approximation rate could be reduced to
‖u‖H1,0(Ωγ ) . h1/2L ‖u‖H2,1(Ω)
for an arbitrary convex domain D.In order to obtain an estimate with the desired convergence rate, we will estimate the error
in the slightly weaker ‖ ‖S-norm - which is the more natural norm for our transport problem.We first estimate the contribution to the S-norm of a single product element TD× Ij in Ωγ2
.To this end, we distinguish between three different types of triangles TD (Figs. 2.18 to 2.22).
• Type I: The triangle has an edge [v1, v2] that is parallel to the locally straight boundary∂D (Fig. 2.18 or Fig. 2.19).
• Type II: The triangle has an edge [v1, v2] to which there exists a tangent line to D parallelto [v1,v2] such that the distance between the tangent contact point p and the third vertexv3 is of order hL (Fig. 2.20 or Fig. 2.21):
‖v3 − p‖2 ≤ ChL.
As the domain D is convex, this tangent point p is unique.
• Type III: Any triangle of D with one vertex on the boundary that does not fall into oneof the categories above (Fig. 2.22).

46 2.4. GRADED SPARSE TENSOR PRODUCT SPACE
v1 v2
∂D
χ
η
ϕ
TD
Figure 2.18: Triangle TD of type I
v1 v2
∂D
χ
η
ϕ
TD
Figure 2.19: Triangle TD of type I
v1 v2
p
∂D
χ
η
ϕ
TD
Figure 2.20: Triangle TD of type II
v1 v2
p
∂D
χ
η
ϕ
TD
Figure 2.21: Triangle TD of type II

CHAPTER 2. SPARSE TENSOR PRODUCT DISCRETIZATION 47
v1
v2
∂D
TD
Figure 2.22: Triangle Type III
For product elements TD × Ij, where TD is of type I or II, we will take advantage of thefact that all product elements TD × Ij ∈ Ωγ2
are contained in an O(hL)-neighborhood of thetransition line γ. For the remaining product elements TD × Ij , where TD is of type III, we willprove that the number of such elements is bounded independently of the refinement level L.
We start with the estimates for triangles of type I or II and introduce for each such trianglea local coordinate system (χ, η), where χ is parallel to [v1,v2] and η perpendicular to it (Figs.2.18 - 2.21). By definition of the boundary line γ, for triangles of type I or II, there is at leastone point p ∈ ∂D that, combined with the solid angle ϕ that corresponds to the direction of χ,satisfies
n(p) · (cos ϕ, sin ϕ)T = 0,
where n(p) denotes the outer unit normal in p to D. The point (p, ϕ) is therefore contained inγ. As the diameter of the product element TD×Ij is of order hL and p is in the hL-neighborhoodof the triangle, there exists a product element of diameter ChL that contains TD × Ij as well as(p, ϕ). If we choose the origin of the spherical coordinate ϕ to be the angle corresponding to ϕ,(Figs. 2.18 - 2.22), TD × Ij and p are contained in an element Q× [−ChL, ChL] where Q is arectangle (with one curved edge for triangles of type II) that contains TD as well as ITD
∩ ∂Dand satisfies |Q| . h2
L .
In these local coordinates, taking into account that on a single product domain TD × Ij u islinear with respect to D and constant with respect to S,
s · ∇xu = cosϕ u,χ + sinϕ u,η.
On a product element TD × Ij , where the triangle TD is of type I or II, we have
|u,χ| =|u1j − u2j|
hL, |u,η| ≤ max
i=1,2
|uij |hL
.
As |ϕ| . hL and therefore sin(ϕ) . hL, the contributions of the gradient perpendicular to theboundary ∂D are scaled with hL and we obtain the following estimate:

48 2.4. GRADED SPARSE TENSOR PRODUCT SPACE
Lemma 2.31. Let TD be a triangle of type I or II of edge length hL with [v1,v2] being the edgeparallel to χ and Ij an interval of length hL such that TD × Ij is contained in Ωγ2
and u(x, ϕ)is defined as in (2.40). Then
‖s · ∇xu‖2L2(TD×Ij). hL|u1j − u2j |2 + h3
L maxi=1,2
|uij |2
+ h2L|u1j − u2j |max
i=1,2|uij |.
Proof. With s = (cosϕ, sinϕ)T
‖s · ∇xu‖2L2(TD×Ij)≤
∫ ChL
−ChL
∫
Q
(cos2 ϕ
(u1j − u2j
hL
)2
+ sin2 ϕ
(maxi=1,2 |uij |
hL
)2
+ 2cosϕ sinϕ
(u1j − u2j
hL
)maxi=1,2 |uij |
hL
)dx dϕ
. hL|Q|(u1j − u2j
hL
)2
+ h3L|Q|
(maxi=1,2 |uij |
hL
)2
+ h2L|Q|
(u1j − u2j
hL
)maxi=1,2 |uij |
hL
. hL|u1j − u2j |2 + h3L max
i=1,2|uij |2 + h2
L|u1j − u2j |maxi=1,2
|uij |
Before giving the required estimate for |u1j − u2j | , we state two auxiliary lemmata.
Lemma 2.32. Let TD× Ij be a product element of diameter diam(TD× Ij) . hL, Q a rectangleof diameter diam(Q) . hL that contains TD as well as ITD
∩ ∂D and v ∈ H1(Ω).If there exists (v0, ϕ0) on the boundary of Q× Ij such that v(v0, ϕ0) = 0 then
‖v‖L2(Q×Ij) . hL‖v‖H1(Q×Ij).
Proof. For any (x, ϕ) =: (χ, η, ϕ) ∈ TD × Ij we can express v(x, ϕ) = v(χ, η, ϕ) as a sum of lineintegrals
v(x, ϕ) = v(χ0, η0, ϕ0) +
∫ η
η0
v,η dη +
∫ χ
χ0
v,χ dχ+
∫ ϕ
ϕ0
v,ϕ dϕ.
With v(x0, ϕ0) = 0 and applying Holder’s inequality
|v(x, ϕ)| ≤∫
Iη
|v,η| dη +
∫
Iχ
|v,χ| dχ+
∫
Ij
|v,ϕ| dϕ
≤ h1/2L
(∫
Iη
|v,η|2 dη)1/2
+
(∫
Iχ
|v,χ|2 dχ)1/2
+
(∫
Ij
|v,ϕ|2 dϕ)1/2
,
where Iη and Iχ are intervals of length . hL that contain the intervals [η0, η] and [χ0, χ],respectively. Therefore
|v(x, ϕ)|2 . hL
((∫
Iη
|v,η|2 dη)
+
(∫
Iχ
|v,χ|2 dχ)
+
(∫
Ij
|v,ϕ|2 dϕ))
.
Integration over the product element Q× Ij then results in
‖v‖2L2(Q×Ij)=
∫
Q×Ij
|v(x, ϕ)|2 dx dϕ . h2L‖v‖2H1(Q×Ij)

CHAPTER 2. SPARSE TENSOR PRODUCT DISCRETIZATION 49
Lemma 2.33. Let TD be a triangle of type I or II on T LD and Ij an interval on T L
S such thatTD × Ij is contained in Ωγ2
. Then
‖u,χ‖2L2(TD×Ij). h3
L‖u‖2H2,1(IQ×S1),
where Q is a (possibly curved) rectangle as defined previously and
IQ :=⋃
x∈Q
Ix.
Proof. As defined previously, Q is a rectangle that contains TD as well as a tangent contactpoint p in the hL-neighborhood of TD and satisfies diam(Q) . hL. We distinguish between thetwo cases where TD is of type I or type II or, equivalently, between the cases where Q has hasa curved edge or not.
a) TD is of type I
If Q is not curved, then γ is constant with respect to x ∈ ∂D on Q× Ij ∩ ∂D × S1 (Fig.2.23). As u(x, ϕ) is zero on one side of γ on ∂Q × Ij , the derivative u,χ along ∂D iszero on that part of the boundary of Q × Ij (Fig. 2.23). This implies that there exists
u = 0
Ij
TD
∂D
Q
γ
Figure 2.23: u is zero on parts of ∂Q× Ij.
a point (x0, ϕ0) ∈ Q × Ij such that uχ(x0, ϕ0) = 0 and allows to apply Lemma 2.32 to‖u,χ‖L2(Q×Ij). Therefore, using that
‖u,χ‖L2(TD×Ij) ≤ ‖u,χ‖L2(Q×Ij),
||u,χ||2L2(TD×Ij). h2
L
(||u,χχ||2L2(Q×Ij)
+ ||u,χη||2L2(Q×Ij)+ ||u,χϕ||2L2(Q×Ij)
)
. h3L
(||u,χχ||2H0,1(Q×S1) + ||u,χη||2H0,1(Q×S1) + ||u,χϕ||2H1,0(IQ×Ij)
)
. h3L‖u‖2H2,1(IQ×S1),
where we used in the second step the same inequalities as in the proof of Lemma 2.25.

50 2.4. GRADED SPARSE TENSOR PRODUCT SPACE
x
y
χ
η
(0, 0)(0, 0)
2hL
2hL
2hL
2hL
χ0
(χ, η) = F (x, y)
ChL + c(χ)
Figure 2.24: Mapping to reference element.
b) TD is of type II
If the boundary in the hL-neighborhood of TD is curved, we cannot guarantee u,χ to bezero on an area on the boundary of Q× Ij .Therefore, we define the mapping (Fig. 2.24)
F : [0, ChL]2 → Q (curved element in Fig. 2.24)
(x, y) 7→ (χ, η) = (x, y + c(x))
with jacobian matrix
DF =
(1 0
c′(x) 1
)
and jacobian |DF | = 1. Its inverse is given by
F−1 : Q → [0, ChL]2
(χ, η) 7→ (x, y) = (χ, η − c(χ)),
the pullback of a function u(χ, η) in reference coordinates by
u(χ, η) = u(F (x, y)) = u(x, y)
and its partial derivative u,χ(χ, η) in the new coordinates by
u,χ(χ, η) = u,x(x, y)x,χ + u,y(x, y)y,η (2.41)
= u,x(x, y)− u,y(x, y)c′(x). (2.42)
As c(χ) is a C2-function with bounded curvature, there is a constant C such that c′′(χ) ≤C. Furthermore, c′(χ0) = 0 for the position that corresponds to the tangent point p.Therefore
c(χ) = c(χ0) +1
2c′′
(χ0)(χ− χ0)2 +O(h3
L) (2.43)
⇒ |c′(x)| = |c′(χ)| = |c′′(χ0)(χ− χ0)|+O(h2L) . hL. (2.44)

CHAPTER 2. SPARSE TENSOR PRODUCT DISCRETIZATION 51
For the directional derivative u,χ, using (2.42) and (2.44), we have the estimate
‖u,χ‖2L2(Q×Ij)=
∫
Ij
∫ ChL
0
∫ ChL
0
(u,x(x, y)− u,y(x, y)c
′(x))2dx dy dϕ
. ‖u,x‖2L2([0,ChL]2×Ij)+ hL‖u,x‖L2([0,ChL]2×Ij)‖u,y‖L2([0,ChL]2×Ij)
+ h2L‖u,y‖2L2([0,ChL]2×Ij)
.
For (χ, η, ϕ) on the inflow boundary Γ− and (x, y) = F−1(χ, η)
u,x(x, y, ϕ) = 0.
Therefore, we can apply Lemma 2.32 to ‖u,x‖2L2([0,ChL]2×Ij)
‖u,x‖2L2([0,ChL]2×Ij). h2
L‖u,x‖2H1([0,ChL]2×Ij)
and obtain
‖u,χ‖2L2(Q×Ij). h2
L‖u,x‖2H1([0,ChL]2×Ij)
+ h2L‖u,x‖H1([0,ChL]2×Ij)‖u,y‖L2([0,ChL]2×Ij)
+ h2L‖u,y‖2L2([0,ChL]2×Ij)
. h2L
(‖u,x‖2H1([0,ChL]2×Ij)
+ ‖u,y‖2L2([0,ChL]2×Ij)
).
As
‖u,x‖2H1([0,ChL]2×Ij). ‖u,χ‖2H1(Q×Ij)
+ ‖u,η‖2H1(Q×Ij)and
‖u,y‖2L2([0,ChL]2×Ij). ‖u,η‖2L2(Q2×Ij)
,
‖u,χ‖2L2(Q×Ij). h2
L
(‖u,χ‖2H1(Q×Ij)
+ ‖u,η‖2H1(Q×Ij)
)
. h3L‖u‖2H2,1(IQ×Ij)
,
where the last step is analogous to the last step in part a) of the proof.
Lemma 2.34. Let TD be a triangle of type I or II with edge length hL, [v1,v2] the edge of TD
parallel to χ and Ij an interval of length hL such that TD × Ij is contained in Ωγ2and u(x, ϕ)
is defined as in (2.40). Then
|u1j − u2j| . hL‖u‖H2,1(ITD×S1).
Proof. Using Lemma 2.28, we obtain
|u1j − u2j | ≤1
|Ij |
∫
Ij
∫
[v1,v2]|u,χ| dχ dϕ
.(h−1
L ||u,χ||L2(TD×Ij) + ||∇u,χ||L2(TD×Ij)
)1/2||u,χ||1/2
L2(TD×Ij).
With Lemma 2.33 and
||∇u,χ||L2(TD×I) . h1/2L ‖u‖H2,1(TD×S1)
we get
|u1j − u2j | .(h−1
L h3/2L + h
1/2L
)1/2h
3/4L ‖u‖H2,1(ITD
×S1) = hL‖u‖H2,1(ITD×S1).

52 2.4. GRADED SPARSE TENSOR PRODUCT SPACE
A
A
A
A
A
B
B
B
B
C
C
C
C
Figure 2.25: Triangles of type III can only arise by refining triangles of type C on thecoarsest mesh, which have only one vertex on the boundary.
Lemma 2.35. The number of triangles in Dγ2that are of type III is bounded by a constant,
independently of the refinement level L.
Proof. The triangles at the boundary of the coarsest mesh T 0D can be divided into three types
(Fig. 2.25):
• Type A: The triangle has one straight edge on the boundary ∂D.
• Type B: The triangle has one curved edge on the boundary ∂D.
• Type C: The triangle has only one vertex on the boundary ∂D.
Any sub-triangle of a triangle of type A that is contained in Dγ2is of type I, as one of the edges
is parallel to the boundary ∂D. If triangles of type B are divided such that the new verticeson ∂D are the tangent contact points of tangents that are parallel to the neighboring verticeson ∂D (dashed lines in Fig.2.25), then all sub-triangles that are contained in Dγ2
are of typeII, as there is always a point p in the hL neighborhood of the sub-triangle which is the tangentcontact point of the tangent parallel to the edge on Dγ1
∩Dγ2. Therefore, triangles of type III
can only arise from the refinement of triangles of type C. As these triangles have only one vertexon ∂D, the number of sub-triangles that are contained in Dγ2
is at maximum 3, independent ofthe refinement level L. It follows that the total number of triangles of type III is bounded by aconstant independent of the refinement level L.
Theorem 2.36. Let u be the approximation to u ∈ H2,1(Ω) ∩ V0 as defined in (2.40). Then
‖u‖S(Ωγ2) . hL‖u‖H2,1(Ω).

CHAPTER 2. SPARSE TENSOR PRODUCT DISCRETIZATION 53
Proof. We divide Ωγ2into a part Ω1
γ2, where the triangles TD of the product elements are of
type I or II and a part Ω2γ2
, where the triangles TD are of type III.
For any product element TD × Ij ∈ Ω1γ2
, we can use Lemmata 2.31, 2.34 and 2.29 to obtainan estimate for the ‖ ‖S-norm of u
‖u‖2S(TD×Ij). hL|u1j − u2j |2 + h3
L maxi=1,2
|uij |2 + h2L|u1j − u2j |max
i=1,2|uij |
. h3L‖u‖2H2,1(ITD
×S1) + h4L
(‖u‖H2,1(D×Ij) + ‖u‖H2,1(ITD
×S1)
)2
+ h7/2L ‖u‖H2,1(ITD
×S1)
(‖u‖H2,1(D×Ij) + ‖u‖H2,1(ITD
×S1)
)
. h3L‖u‖2H2,1(ITD
×S1) + h4L‖u‖2H2,1(D×Ij)
.
For any triangle TD ∈ T LD , the number of product elements in Ωγ2
, according to Lemma 2.26, isbounded by a constant. Therefore, summing over all product elements in Ω1
γ2, with triangle TD
fixed, yields
∑
TD×Ij∈Ω1γ2
‖u‖2S(TD×Ij)≤ ‖u‖2S((TD×S1)∩Ωγ2
) . h3L‖u‖2H2,1(ITD
×S1) + h4L‖u‖2H2,1(D×S1).
For the first term, we use the fact that the number of overlapping domains ITD, TD ∈ Dγ2
, isbounded by a constant and for the second term that the number of elements in Dγ2
grows atmost proportional to . h−1
L . Therefore
∑
TD×Ij∈Ω1γ2
‖u‖2S(TD×Ij). h3
L‖u‖2H2,1(Ω).
Finally, we also add the contributions from the product elements with triangles of type III. Forany product element TD×Ij ∈ Ωγ2
, where TD of type III, we can use the estimates from Lemma2.30
‖u‖2S(TD×Ij). ‖u‖2H1,0(TD×Ij)
. h2L
(‖u‖2H2,1(D×Ij)
+ ‖u‖2H2,1(ITD×S1)
).
As the number of these elements is constant independent of the refinement level (Lemma 2.35)
∑
TD×Ij∈Ω2γ2
‖u‖2S(TD×Ij). h2
L‖u‖2H2,1(D×S1).
In order to obtain an estimate for the domain Ωγ2, we add the contributions from both sub-
domains Ω1γ2
and Ω2γ2
, which results in
‖u‖2S(Ωγ2) . h3
L‖u‖2H2,1(D×S1) + h2L‖u‖2H2,1(D×S1) . h2
L‖u‖2H2,1(Ω).
The case (d1, d2) = (2, 2)
As in the (d1, d2) = (2, 1)-case, we first give an estimate for ‖u‖Ωγ before constructing theboundary approximation u.
In addition to 2.24, we introduce the following definitions:

54 2.4. GRADED SPARSE TENSOR PRODUCT SPACE
ϑ1 = 0
ϑ2 = π/2
ϑ3 = π
ϑ4 = π/2
Figure 2.26: The great circles through the north and the south pole are divided into foursectors.
Definition 2.37. (S1x,ϑi
, u,ζ , ITDs, ITD
TS)
We divide the great circles through the north and the south pole into 4 sectors as shown inFig. 2.26. Each of the midpoints of these sectors corresponds to one of the values of 0, π/2 or πfor the spherical coordinate ϑ.
For each x ∈ ∂D we denote by S1x,π/2 the great circle in the x− y-plane and by S1
x,0 = S1x,π
the great circle through the north and the south pole perpendicular to γ(x) (Fig. 2.27).Given any TS ∈ T L
S , for each triangle TD ∈ Dγ , we select a point x ∈ ∂D with dist(x, TD) .
hL. For (x, s) ∈ Dγ × TS, ITDs
is the line on S2 through s parallel to S1x,ϑi
, where the center ofgravity of TS lies in the ϑ-section with midpoint. ϑi. u,ζ(x, s) is then the directional derivativeon S2 along ITD
sand
ITD
TS:=
⋃
s∈TS
ITDs.
Definition 2.38. (Local Coordinates (ζ, ω) on TS)For each TS ∈ T L
S and fixed x ∈ Dγ , we define a local coordinate system on TS , such thatthe ζ-direction is aligned with ITD
s, s ∈ TS (def. 2.37) and the ω-direction is perpendicular to it.
We furthermore define ζ0, ζ1, ω0 and ω1 such that [ζ0, ζ1] and [ω0, ω1] are the shortest intervalswith TS ⊂ [ζ0, ζ1]× [ω0, ω1].
Lemma 2.39. For any function v ∈ H1,1(Ωγ)
‖v‖L2(TD×TS) . hL‖v‖H1,1(ITD×I
TDTS
),
where hL is the mesh width of T LS and T L
D .
Proof. Analogously to the proof of Lemma 2.25, for any function v ∈ H1,1(Ωγ), we can, foralmost all (x, s) ∈ Ωγ with s ∈ TS ∈ T L
S , apply the multiplicative trace inequality into the

CHAPTER 2. SPARSE TENSOR PRODUCT DISCRETIZATION 55
direction of ζ. We then obtain
|v(x, s)|2 ≤ ‖v(x, .)‖2H1(I
TDs )
with x ∈ TD ∈ T LD . Integration over the triangle TS ∈ T L
S with mesh width hL then results in
∫
TS
|v(x, s)|2 ds . hL‖v(x, .)‖2H1(I
TDTS
).
In the same way, we can proceed with ‖v(x, .)‖2H1(I
TDTS
)as a function of the position x ∈ T 0
D
and apply the multiplicative trace inequality into the direction of ~ξT 0D
‖v(x, .)‖2H1(I
TDTS
). ‖v‖2
H1,1(Ix×ITDTS
).
After integration over the triangle TD ∈ T LD with mesh width hL, we obtain
‖v‖2H0,1(TD×I
TDTS
). hL‖v‖2
H1,1(ITD×I
TDTS
).
Therefore
‖v‖2L2(TD×TS) =
∫
TD
∫
TS
|v(x, s)|2 ds dx .
∫
TD
hL‖v(x, .)‖2H1(I
TDTS
)dx
= hL‖v‖2H0,1(TD×I
TDTS
). h2
L‖v‖2H1,1(ITD×I
TDTS
).
Lemma 2.40. For any triangle TD, the number of product elements TD × TS ∈ Ωγ whose
domains ITD× ITD
TSoverlap is bounded by a constant independent of L.
Proof. Analogously to the proof of Lemma 2.26, it is sufficient to show that for any triangleTD ∈ Dγ , the number of product elements TD × TS, TS ∈ T L
S , that are contained in Ωγ1, are
bounded by a constant independently of L. The product elements in Ωγ1are the ones that are
intersected by γ. As each triangle TD ∈ Dγ1has only one boundary edge and the curvature of
the boundary is bounded, the spherical triangles TS that are affected for a fixed triangle TD arecontained between two great circles through the poles with intermediate angle ϕ . hL. As therings ITD
TSare parallel for spherical triangles of the same sector with respect to ϑ, the number of
sub-domains ITD× ITD
TSthat overlap with ITD
× ITD
TSis bounded by a constant independent of
the refinement level L.
Theorem 2.41. If u ∈ H2,1(Ω), then
‖u‖H1,0(Ωγ) . hL‖u‖H2,1(Ω).
Proof. Let TD × TS be a product element in Ωγ . Then
‖u‖2H1,0(TD×TS) =
∫
TD
∫
TS
(u2
,x + u2,y + u2
)ds dx.
We can now apply the previous Lemma 2.39 to u,x, u,y and u and obtain
‖u‖2H1,0(TD×TS) . h2L‖u‖2H2,1(ITD
×ITDTS
).

56 2.4. GRADED SPARSE TENSOR PRODUCT SPACE
−1 −0.5 0 0.5 1−0.500.5
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
θ1=π
θ3=0
θ4=π/2
θ2=π/2
γ(x)
S1x,0
=S1x,π
S1x,π/2
TS
IT
D,s
s
IT
D,T
S
Figure 2.27: For each x ∈ ∂D, S1x,π/2 (green) denotes the great circle in the x − y-plane and
S1x,0 = S1
x,π (blue) the great circle through the north and the south pole perpendicular to γ(x)
(red). Given any spherical triangle TS ∈ T LS , we select for each triangle TD ∈ Dγ a point
x ∈ ∂D with dist(x, TD) . hL. For (x, s) ∈ Dγ × TS, ITDs
(black) is the line on S2 through sparallel to S1
x,ϑi, where the center of gravity of TS lies in the ϑ-section with midpoint ϑi. The
corresponding domain ITD
TSis marked in yellow.

CHAPTER 2. SPARSE TENSOR PRODUCT DISCRETIZATION 57
For TD ∈ T LD , the number of elements TD × TS ∈ Ωγ with overlapping domains ITD
× ITD
TSis
bounded by a constant (Lemma 2.40). Therefore
‖u‖2H1,0((TD×S2)∩Ωγ ) . h2L‖u‖2H2,1(ITD
×S2).
As the number of domains ITD, TD ∈ T L
D , that overlap ITDis bounded by a constant, we have
‖u‖H1,0(Ωγ) . hL‖u‖H2,1(Ω).
We construct a function u ∈ V L0 that vanishes on Ωγ ∩ (∂D × S2) and satisfies the trace
condition with u on ∂(Ωγ) ∩ Ω. Let vi be a vertex on T LD and Tj a spherical triangle on T L
S .Then for s ∈ Tj , u(x, s) is the continuous, piecewise linear function with respect to T L
D withvertex values
uij := u(vi, s) =
1
|Tj |
∫Tju(vi, s) ds, (vi, s) /∈ Ωγ1
0, otherwise.(2.45)
Lemma 2.42. Let TD be a triangle on T LD with edge length hL and edges ei, i = 1, 2, 3, and
I × J a spherical rectangle of diameter hL and let (ξ, η) be local coordinates in D such that ξ isparallel to the edge ei and η perpendicular to it, with ∇ := (∂ξ, ∂η)
T .
Then for u ∈ H2,1(Ω)
1
|I × J |
∫
J
∫
I
∫
ei
|u,ξ| dξ dϕdϑ
. h−1/2L
(h−1
L ||u,ξ||L2(TD×I×J) + ||∇u,ξ||L2(TD×I×J)
)1/2 ||u,ξ||1/2L2(TD×I×J)
.
Proof. Following the proof of Lemma 2.28
1
|I × J |
∫
J
∫
I
∫
ei
|u,ξ(ξ, ϕ, ϑ)| dξ dϕdϑ ≤ h1/2L h−2
L
∫
J
∫
I‖u,ξ(., ϕ, ϑ)‖L2(ei) dϕdϑ
. h−3/2L
∫
J
∫
I
((h−1
L ||u,ξ(., ϕ, ϑ)||L2(TD) + ||∇u,ξ(., ϕ, ϑ)||L2(TD))||u,ξ(., ϕ, ϑ)||L2(TD)
)1/2dϕdϑ
. h−3/2L
(∫
J
∫
I
(h−1
L ||u,ξ(., ϕ, ϑ)||L2(TD) + ||∇u,ξ(., ϕ, ϑ)||L2(TD)
)dϕdϑ
)1/2
·(∫
J
∫
I||u,ξ(., ϕ, ϑ)||L2(TD) dϕdϑ
)1/2
. h−3/2L
((∫
J
∫
Ih−1
L ||u,ξ(., ϕ, ϑ)||L2(TD) dϕdϑ
)+
(∫
J
∫
I||∇u,ξ(., ϕ, ϑ)||L2(TD) dϕdϑ
))1/2
·(∫
J
∫
I||u,ξ(., ϕ, ϑ)||L2(TD) dϕdϑ
)1/2
. h−1/2L
((∫
J
∫
Ih−2
L ||u,ξ(., ϕ, ϑ)||2L2(TD) dϕdϑ
)1/2
+
(∫
J
∫
I||∇u,ξ(., ϕ, ϑ)||2L2(TD) dϕdϑ
)1/2)1/2
·(∫
J
∫
I||u,ξ(., ϕ, ϑ)||2L2(TD) dϕdϑ
)1/4
= h−1/2L
(h−1
L ||u,ξ||L2(TD×I×J) + ||∇u,ξ||L2(TD×I×J)
)1/2 ||u,ξ||1/2L2(TD×I×J)
.

58 2.4. GRADED SPARSE TENSOR PRODUCT SPACE
Lemma 2.43. Let vi be a vertex on T LD and Tj a triangle on T L
S such that (vi, Tj) is a face onΩγ2∩ Ω. Furthermore, let Ij and Jj be intervals on the local coordinate axes of length hL such
Tj ⊂ Ij × Jj . Then, with u defined as in 2.45,
|uij | ≤1
|Ij × Jj|
∫
Jj
∫
Ij
|u(vi, ϕ, ϑ)| dϕdϑ .
(‖u‖H2,1(D×Ij×Jj) + ‖u‖
H2,1(ITD×I
TDIj×Jj
)
),
where TD is a triangle of edge length 2hL that contains vi as well as a point on ∂D.
Proof. u ∈ H2,1(Ω) implies that u is continuous with respect to space and that traces withrespect to solid angle are well-defined. The spherical triangle Tj can be embedded into theproduct domain Ij × Jj with ϕ ∈ Ij and ϑ ∈ Jj .
As dist ((vi, ϕ, ϑ), γ) . hL for every (ϕ, ϑ) ∈ Tj , there exists (v0, ϕ0, ϑ) ∈ ∂Ω such that
∫
Jj
u(v0, ϕ0, ϑ) dϑ = 0 and ‖vi − v0‖2 . hL, ‖ϕ− ϕ0‖2 . hL,
where ‖a− b‖2 is shortest path from a to b in D and S2, respectively.Then, we can estimate the mean of |u(vi, ϕ, ϑ)| over Ij × Jj by expressing u(vi, ϕ, ϑ) for
almost all (ϕ, ϑ) ∈ Ij × Jj with line integrals along edges of product elements
u(vi, ϕ, ϑ) = u(v0, ϕ0, ϑ) +
∫ ϕ
ϕ0
u,ϕ(v0, ϕ, ϑ) dϕ +
∫
[v0,vi]u,ξ(ξ, η, ϕ, ϑ) dξ.
Integration over the product element Ij × Jj then results in
1
|Ij × Jj|
∫
Jj
∫
Ij
|u(vi, ϕ, ϑ)| dϕdϑ
≤ 1
|Ij × Jj|
∫
Jj
∫
Ij
(|u(v0, ϕ0, ϑ)|+
∫ ϕ
ϕ0
|u,ϕ(v0, ϕ, ϑ)| dϕ +
∫
[v0,vi]|u,ξ(ξ, η0, ϕ, ϑ)| dξ
)dϕdϑ
.
√|Ij × Jj ||Jj |
∫
Jj
∫
Ij
|u,ϕ(v0, ϕ, ϑ)|2 dϕ dϑ+1
|Ij × Ij|
∫
Jj
∫
Ij
∫
[v0,vi]|u,ξ(ξ, η0, ϕ, ϑ)| dξ dϕdϑ
. ‖u,ϕ(v0, .)‖L2(Ij×Jj) +1
|Jj × Ij |
∫
Jj
∫
Ij
∫
[v0,vi]|u,ξ(ξ, η0, ϕ, ϑ)| dξ dϕdϑ.
For the first part, we can use that
|u,ϕ(v0, ϕ, ϑ)|2 . ‖u,ϕ(., ϕ, ϑ)‖2H2(D)
for almost every ϕ, ϑ ∈ S and obtain
‖u,ϕ(v0, .)‖2L2(Ij×Jj). ‖u,ϕ‖2H2,0(D×Ij×Jj)
. ‖u‖2H2,1(D×Ij×Jj).
For the second part, we apply Lemma 2.42, followed by Lemma 2.39
1
|Ij × Jj |
∫
Jj
∫
Ij
∫
ei
|u,ξ(ξ, η, ϕ)| dξ dϕdϑ
. h−1/2L
(h−1
L ||u,ξ||L2(TD×Ij×Jj) + ||∇u,ξ||L2(TD×Ij×Jj)
)1/2||u,ξ||1/2
L2(TD×Ij×Jj)
. h−1/2L
(‖u‖
H2,1(ITD×I
TDIj×Jj
)+ h
1/2L ‖u‖H2,1(TD×I
TDIj×Jj
)1/2
h1/2L ‖u‖
1/2
H2,1(ITD×I
TDIj×Jj
)
. ‖u‖H2,1(ITD
×ITDIj×Jj
).

CHAPTER 2. SPARSE TENSOR PRODUCT DISCRETIZATION 59
Therefore
|uij| ≤1
|Ij × Jj |
∫
Jj
∫
Ij
|u(vi, ϕ, ϑ)| dϕdϑ .
(‖u‖H2,1(D×Ij×Jj) + ‖u‖
H2,1(ITD×I
TDIj×Jj
)
).
Lemma 2.44. Let TD be a triangle of edge length hL and Tj a spherical triangle of diameterhL such that TD × Tj is contained in Ωγ2
. With vi, i = 1, 2, 3 being the vertices of TD and u asdefined in 2.45, we have
‖u‖2L2(TD×Tj). h4
L
(‖u‖2H2,1(D×Ij×Jj)
+ ‖u‖2H2,1(ITD
×ITDIj×Jj
)
)
‖∇xu‖2L2(TD×Tj). h2
L
(‖u‖2H2,1(D×Ij×Jj)
+ ‖u‖2H2,1(ITD
×ITDIj×Jj
)
).
Proof. We can apply simple scaling arguments as in the case (d1, d2) = (2, 1). As the functionis linear with respect to TD and constant with respect to Tj, |u| and |∇xu| are bounded as
|u| ≤ maxi∈1,2,3
|uij |
|∇xu| . maxi∈1,2,3
|uij |h−1L .
When integrating the squares over the product domain TD × Tj and applying Lemma 2.43, weobtain
‖u‖2L2(TD×Tj). h4
L maxi∈1,2,3
|ui|2 . h4L
(‖u‖2H2,1(D×Ij×Jj)
+ ‖u‖2H2,1(ITD
×ITDIj×Jj
)
)
‖∇xu‖2L2(TD×Tj). h2
L maxi∈1,2,3
|ui|2 . h2L
(‖u‖2H2,1(D×Ij×Jj)
+ ‖u‖2H2,1(ITD
×ITDIj×Jj
)
).
Lemma 2.45. Let TD be a triangle of type I or II of T LD and Tj a spherical triangle on T L
S
such that TD × Tj is contained in Ωγ2. Then
‖u,χ‖2L2(TD×Tj). h3
L‖u‖2H2,1(IQ×ITDIj×Ij
),
where Q is a rectangle as in Lemma 2.32 and Ij and Jj the intervals as defined above.
Proof. The proof is a straightforward adaptation of the proof of Lemma 2.33 with ITDs
insteadof S1 and integration over Jj .
Lemma 2.46. Let TD be a triangle of type I or II with edge length hL, [v1, v2] the edge of TD
parallel to χ and Tj a spherical triangle of diameter hL such that TD × Tj is contained in Ωγ2.
Then, with u as defined in 2.45,
|u1j − u2j | . h1/2L ‖u‖H2,1(ITD
×ITDIj×Jj
).
Proof. Using Lemma 2.42, we obtain
|u1j − u2j | ≤1
|Ij × Jj |
∫
Ij×Jj
∫
[v1,v2]|u,ξ| dξ dϕdϑ
. h−1/2L
(h−1
L ||u,ξ||L2(TD×Tj) + ||∇u,ξ||L2(TD×Tj)
)1/2||u,ξ||1/2
L2(TD×Tj)

60 2.4. GRADED SPARSE TENSOR PRODUCT SPACE
and with Lemma 2.45 follows that
||∇u,ξ||2L2(TD×Tj). hL‖u‖2
H2,1(TD×ITDTj
).
This results in
|u1j − u2j| . h−1/2L
(h−1
L h3/2L + h
1/2L
)1/2h
3/4L ‖u‖H2,1(ITD
×ITDTj
)
= h1/2L ‖u‖H2,1(ITD
×ITDTj
).
Lemma 2.47. Let TD be a triangle of type I or II of edge length hL with [v1, v2] being the edgeparallel to χ and and Tj a spherical triangle of diameter hL such that TD × Tj is contained inΩγ2
. Then, with u(x, ϕ) being defined as in 2.45,
‖s · ∇xu‖2L2(TD×Tj). h2
L|u1j − u2j|2 + h4L max
i=1,2|uij |2
+ h3L|u1j − u2j|max
i=1,2|uij |.
Proof. Analogously to the case (d1, d2) = (2, 1), in any product element TD × Tj , s · ∇xu can beexpressed in local coordinates
s · ∇xu = cosϕ cos ϑu,χ + sinϕ cos ϑu,η.
With Ij and Jj being the intervals and Q the rectangle as defined previously,
‖s · ∇xu‖2L2(TD×Tj)≤
∫
Ij
∫
Jj
∫
Q
(cos2 ϕ
(u1j − u2j
hL
)2
+ sin2 ϕ
(maxi=1,2 |uij |
hL
)2
+ 2cosϕ sinϕ
(u1j − u2j
hL
)maxi=1,2 |uij|
hL
)dx dϑ dϕ
. h2L|Q|
(u1j − u2j
hL
)2
+ h4L|Q|
(maxi=1,2 |uij |
hL
)2
+ h3L|Q|
(u1j − u2j
hL
)maxi=1,2 |uij |
hL
. h2L|u1j − u2j|2 + h4
L maxi=1,2
|uij |2 + h3L|u1j − u2j|max
i=1,2|uij |.
Theorem 2.48. Let u be the approximation to u ∈ H2,10 (Ω) as defined in (2.45). Then
‖u‖S(Ωγ2) . hL‖u‖H2,1(Ω).
Proof. As in the case (d1, d2) = (2, 1) (Theorem 2.36), we divide Ωγ2into two parts Ω1
γ2and
Ω2γ2
, depending on the type of the triangle TD. For any product element TD × Tj ∈ Ω1γ2
, usingLemma 2.47, 2.46 and 2.43
‖u‖2S(TD×Tj). h2
L|u1j − u2j |2 + h4L max
i=1,2|uij |2 + h3
L|u1j − u2j |maxi=1,2
|uij |
. h3L‖u‖2H2,1(ITD
×ITDTj
)+ h4
L
(‖u‖H2,1(D×Ij×Jj) + ‖u‖
H2,1(ITD×I
TDIj×Jj
)
)2
+ h7/2L ‖u‖H2,1(ITD
×ITDIj×Jj
)·(‖u‖H2,1(D×Ij×Jj) + ‖u‖
H2,1(ITD×I
TDIj×Jj
)
)
+
. h3L‖u‖2H2,1(ITD
×ITDIj×Jj
)+ h4
L‖u‖2H2,1(D×Ij×Jj).

CHAPTER 2. SPARSE TENSOR PRODUCT DISCRETIZATION 61
For any triangle TD ∈ T LD , the number of product elements in Ωγ2
is, according to Lemma 2.40,bounded by a constant.
Therefore, summing over all product elements in Ω1γ2
, with triangle TD fixed, yields
∑
TD×Tj∈Ω1γ2
‖u‖2S(TD×Tj)≤ ‖u‖S((TD×S2)∩Ωγ2
) . h3L‖u‖2H2,1(ITD
×ITDIj×Jj
)+ h4
L‖u‖2H2,1(D×Ij×Jj).
For the first term we use that the number of overlapping domains ITD, TD ∈ Dγ2
, is boundedby a constant and for the second term that the number of elements in Dγ2
grows at mostproportionally to . h−1
L . Therefore
∑
TD×Tj∈Ω1γ2
‖u‖2S(TD×Tj). h3
L‖u‖2H2,1(Ω).
Finally, we also add the contributions from the product elements with triangles of type III. Forany product element TD × Ij ∈ Ωγ2
, where TD is of type III, we can use the estimates fromLemma 2.44
‖u‖2S(TD×Tj). ‖u‖2H1,0(TD×Tj)
. h2L
(‖u‖2H2,1(D×Ij×Jj)
+ ‖u‖2H2,1(ITD
×ITDIj×Jj
)
).
As the number of these elements is constant independent of the refinement level (Lemma 2.35)
∑
TD×Tj∈Ω2γ2
‖u‖2S(TD×Tj). h2
L‖u‖2H2,1(Ω).
In order to obtain an estimate for the domain Ωγ2, we add the contributions from both sub-
domains Ω1γ2
and Ω2γ2
, which results in
‖u‖2S(Ωγ2) . h3
L‖u‖2H2,1(Ω) + h2L‖u‖2H2,1(Ω) . h2
L‖u‖2H2,1(Ω).
Approximation Properties in the Product Domain D × SBased on the approximation results in the sub-domains Ω and Ωγ , we can now state the finalapproximation theorem:
Theorem 2.49. For any u ∈ H2,1(Ω) ∩ V0 the best-approximation in V l0,LG with respect to the
‖ ‖S-norm satisfies
infvL∈bV L
G
‖u− vL‖S . (L+ 1)hL‖u‖H2,1(Ω)
Proof. We define v(x, s) to be the function that is continuous and piecewise linear with respectto D and constant with respect to S with vertex values
v(vi, s) =
ur(vi, s), (vi, s) /∈ Ωγ1
0, otherwise.
Then
v(x, s) =
ur(x, s), (x, s) ∈ Ω\Ωγ2
ur(x, s), (x, s) ∈ Ωγ2
0, (x, s) ∈ Ωγ1

62 2.4. GRADED SPARSE TENSOR PRODUCT SPACE
and
‖u− v‖2S = ‖u− v‖2S(Ωγ1) + ‖u− v‖2S(Ωγ2
) + ‖u− v‖2S(Ω\Ωγ2
)
= ‖u‖2S(Ωγ1) + ‖u− ur‖2S(Ωγ2
) + ‖u− ur‖2S(Ω\Ωγ2
)
. ‖u‖2S(Ωγ1) + ‖u− u‖2S(Ωγ2
) + ‖u− ur‖2S(Ωγ2) + ‖u− ur‖2
S(Ω)
. ‖u‖2H1,0(Ωγ1) + ‖u‖2H1,0(Ωγ2
) + ‖u‖2S(Ωγ2) + ‖d2L
L,L‖2H1,0(Ωγ2) + ‖u− ur‖2
H1,0(Ω)
= ‖u‖2H1,0(Ωγ) + ‖u‖2S(Ωγ2) + ‖d2L
L,L‖2H1,0(Ωγ2) + ‖u− ur‖2
H1,0(Ω)
For the first term we can apply Theorem 2.27 or 2.41, depending on the dimensionality of S.For the second term, we use Theorem 2.36 or 2.48, respectively. For the third term, we use that
‖d2LL,L‖H1,0(Ωγ2
) . 2−2L‖u‖H2,1(Ωγ2) . hL‖u‖H2,1(Ω)
and for the last term Theorem 2.23. This leads to
‖u− v‖2S . h2L‖u‖2H2,1(Ω) + h2
L‖u‖2H2,1(Ω) + h2L‖u‖2H2,1(Ω) + (L+ 1)h2
L‖u‖2H2,1(Ω)
. (L+ 1)2h2L‖u‖2H2,1(Ω)

Chapter 3
Adaptivity
The sparse tensor product method described in the previous chapter is a powerful tool to reducethe number of degrees of freedom in the discretization in the case of an intensity function thatis smooth with respect to physical space as well as solid angle. However, for a large number ofproblems, this a-priori choice of degrees of freedom is not asymptotically optimal. Consider anisolated radiating source in strongly absorbing media, for example. On the one hand a very fineresolution in the area of the radiating source and in particular at the boundary of the source isrequired. On the other hand, even for a fixed position in this radiation zone a fine resolution insolid angle is only required for some directions. Therefore, many degrees of freedom in physicalspace as well as in solid angle can be neglected as the intensity there is zero. Another example, ifdirected radiative sources or non-zero boundary conditions were allowed, would be light beamsthrough non-participating media with the intensity being zero in most positions and directions.As in most real-world applications the intensity is neither smooth everywhere in the domainnor consists of a light beam in vacuum, we opt for an adaptive algorithm that selects degrees offreedom that provide a near best N-term approximation which means that the basis set is close toan optimal basis approximation for a given problem in the sense of a best N-term approximationas described below. Adaptive multilevel methods have been applied to various - mostly elliptic- problems, see eg. [12, 13, 16, 28, 32]. In [1, 29, 31] adaptive sparse grids are used and asurvey of adaptive wavelet techniques can be found in [14] and the references there. In section3.1, the definition of a best N-term approximation is given, while in section 3.2 definition andconstruction of adaptive sparse tensor product spaces are presented. Numerical experiments canbe found in chapter 8.
3.1 Best N-term Approximation
Assuming that we have at hand a dictionary of hierarchical functions ψλ(x, s) which spansthe space V0, such as the product multilevel functions constructed in the previous chapter, thebest N -term approximation - also referred to as non-linear approximation - u∗Λ of the intensityu(x, s) with respect to a norm ‖‖∗ on D×S is an approximation of u from the space V Λ
0 ⊂ V0
given by
V Λ0 := spanψλ : λ ∈ Λ
for some index set Λ with NL = #Λ = dimV Λ0 many indices chosen such that
‖u− u∗Λ‖∗ ≤ inf#Λ=N
minvΛ∈V Λ
0
‖u− vΛ‖∗. (3.1)
In other words, the best N -term approximation u∗Λ is the best approximation to u if we arewilling to spend N degrees of freedom from the dictionary ψλ(x, s)λ∈∇. It is obvious that
63

64 3.2. ADAPTIVE SPARSE TENSOR PRODUCT SPACE
the best N -term approximation u∗Λ of u converges at least as fast as the (graded) sparse tensor
product approximation uL with N = dimV L0 or N = dimV L
G degrees of freedom, respectively.Therefore, also the best N -term approximation uS
Λ of the intensity will be able to break the curseof dimension (see [27] for theoretical background). What is more, however, is that the set ofsolutions u for which uS
Λ attains the convergence rate of the sparse tensor product approximation
uL with N = dimV L0 degrees of freedom is much larger than H2,1(Ω).
3.2 Adaptive Sparse Tensor Product Space
The idea of introducing adaptivity in the (graded) sparse tensor product context is to drop asmany degrees of freedom of the (graded) sparse tensor product space as possible with as littleloss of accuracy as possible and therefore improve the efficiency of the discretization and theoverall algorithm. An adaptive sparse tensor product space is therefore defined as a subspace ofa (graded) sparse tensor product space. For the sake of simplicity, we restrict the description aswell as the test examples in chapter 8 to subspaces of a non-graded sparse tensor product space.In contrast to a best N-term approximation, we add the restriction that complete trees have tobe maintained in order to preserve the hierarchical structure of the space. This means that if agiven tensor product basis function is contained in the adaptive sparse tensor product space, allits ancestors in physical space as well as solid angle have to be included in the space as well.
Some construction methods of adaptive sparse grid spaces in two dimensions can be found in[1, 29] or [31]. While in [1], adaptivity is used to reduce the number of tensor product subspacesthat are included in the space, [29] and [31] use tree-structures for a more flexible adaptiveapproximation. We follow this second approach with tree-structures. However, as our singlespaces are not identical and substantially more complex due to their dimension of at least twoand the use of dictionaries instead of bases, we have to adapt these ideas for our needs beforewe can define the adaptive sparse tensor product space.
3.2.1 Parent-Child Relationship in the Single Spaces
In order to describe the complete-tree-condition, we introduce a partial order (”parent-childrelationship”) of the single space basis functions as follows:
ϕ(x) <D ϕ′(x) if ϕ(x) is a child of ϕ′(x),
ψ(s) <S ψ′(s) if ψ(s) is a child of ψ′(s),
ϕ(x), ϕ(x)′ being hat functions on any mesh level in physical space and ψ(s), ψ(s)′ being charac-teristic functions or wavelets on the sphere. For the definition of the parent-child relationship inphysical space, we restrict ourselves to the two-dimensional case, as the numerical experimentsare carried out for n = 2. Generalizations of all concepts to n = 3 are straightforward.
In physical space, each basis function of refinement level l corresponds to a vertex vi of themesh of level l. As the dictionary contains hat functions on different levels that correspondto the same vertex, both level and vertex are required to identify a basis function. For whatfollows we will by ϕl
vi(x) denote the hat function of level l with ϕl
vi(vi) = 1. The children of
the basis function ϕlvi
(vi) are all basis functions of the refined level l+ 1 that correspond eitherto a midpoint of an adjacent edge of level l to vi or the vi itself (Fig. 3.1):
For a fixed basis function ϕlvi
(x)
ϕl+1vk
(x) <D ϕlvi
(x) ⇔ i = k or vk is a midpoint of an adjacent edge of level l to vi.

CHAPTER 3. ADAPTIVITY 65
vertex vi on level l
midpoints of edges of level l adjacent to vi
Figure 3.1: The children of a basis function in physical space at level l correspond to themidpoints of adjacent edges of level l.
In solid angle, we define that each basis function corresponds to a spherical triangle of thesame level. A characteristic function corresponds to the triangle of its support and a Haarwavelet basis function to one of the three corner triangles of its support (each of the three
wavelets to a different one). Let ψl,cT (s) denote the characteristic function that corresponds to
a triangle T on level l and ψl,wT (s) the Haar wavelet function that corresponds to triangle T on
level l.
For a fixed characteristic basis function χl,cT (s) that corresponds to a spherical triangle T of
level l, the children are the seven basis functions (characteristic or Haar wavelet functions) thatcorrespond to a triangle on the refined level with the support of the basis function contained inthe support of χl,c
T (s) (Fig. 3.2):
ψl+1,∗
T(s) <S ψ
l,cT (s) ⇔ supp(ψl+1,∗
T) ⊂ supp(ψl,c
T ), ∗ = c or w.
For a fixed wavelet basis function χl,wT (s) that corresponds to a spherical triangle T of level l,
the children are the twelve wavelet basis functions that correspond to a triangle of the refinedlevel with the support of the basis function contained in the support of χl,w
T (s) (Fig. 3.2):
ψl+1,w
T(s) <S ψ
l,wT (s) ⇔ supp(ψl+1,w
T) ⊂ supp(ψl,w
T ).
3.2.2 Parent-Child Relationship in the Product Space
With the definition of children and parents in the two underlying spaces, we now define a”sphere-parent-child relationship” and a ”space-parent-child relationship” for product functionsϕlD
vi(x)ψlS
T (s). Again we use the notation
ϕ(x)ψ(s) <D ϕ′(x)ψ′(s) if ϕ(x)ψ(s) is a space-child of ϕ′(x)ψ′(s),
ϕ(x)ψ(s) <S ϕ′(x)ψ′(s) if ϕ(x)ψ(s) is a sphere-child of ϕ′(x)ψ′(s).
For a given product function ϕlDvi
(x)ψlS ,.T (s), the children in physical space and in solid angle

66 3.2. ADAPTIVE SPARSE TENSOR PRODUCT SPACE
+
++
+
+
−
−
−+ +
−
+
−
−
+++ +
−
− ++
−−
−
++
++ −
++
−
−
−−
−
−
−
−
++
+
+ −
− ++
+
+−
−
−
−
+ + +
−
+− −
+
+
−
+
Figure 3.2: For a characteristic function ψl,cT (s) (top row) of level l, the children (middle row)
are the seven basis functions (characteristic or Haar wavelet functions) that correspond to a
triangle of level l + 1 in the support ψl,cT (s). For a wavelet function of level l ψl,w
T (s) (last threefunctions in the middle row), the children are the twelve wavelet basis functions that correspond
to a triangle of level l + 1 in the support ψl,wT (s).
are defined as
ϕlD+1vk
(x)ψlS ,∗
T(s) <D ϕlD
vi(x)ψlS ,.
T (s) ⇔ T = T, ∗ = c or w, ϕlD+1vk
<D ϕlDvi
ϕlDvi
(x)ψlS+1,∗
T(s) <S ϕ
lDvi
(x)ψT lS ,.(s) ⇔ ψlS+1,∗
T(s) <S ψ
lS ,.T (s).
3.2.3 Definition of Adaptive Sparse Tensor Product Spaces
An adaptive sparse tensor product space V LA is a subspace of a sparse tensor product space
V L0 where for each product basis function in the adaptive sparse tensor product space all its
space-parents and sphere-parents are also contained in the space.
Definition 3.1. (Adaptive Sparse Tensor Product Spaces V LA )
An adaptive sparse tensor product space V LA has to satisfy the following conditions
V LA = Spanϕi(λ)(x)ψj(λ)(s) : λ ∈ Λ ⊂ V L
0
with
ϕ(x)ψ(s) ∈ V LA ⇒ ϕ′(x)ψ′(s) ∈ V L
A
∀ ϕ′(x)ψ′(s) >D ϕ(x)ψ(s),
ϕ′(x)ψ′(s) >S ϕ(x)ψ(s)
Here, i(λ), j(λ) are condensed indices containing level, position and type of the basis functionswith index λ in the index set Λ.

CHAPTER 3. ADAPTIVITY 67
3.2.4 Construction of an Adaptive Sparse Tensor Product Space
When using wavelet basis functions in physical space and solid angle as in [39], an importantfeature of a best N -term approximation can be exploited, namely that a near best N -termapproximation in H1,0(Ω) as described above in section 3.1 can be computed by thresholding,i.e. by simply keeping theN largest contributions to the solution, measured in the ‖‖H1,0(D×S2)-norm, of the multilevel expansion of u, see e.g. [11, Thm. 4.3.1]. However, it turns out that thediscretization with wavelet basis functions in physical space becomes very complicated when thezero boundary conditions are strongly enforced, as for each vertex near the boundary, severalwavelet basis functions on a given level have to be included in the dictionary to account forthe directional dependence of the boundary condition: depending on whether a basis functionin physical space is combined with an inflow or an outflow direction, the value at a boundaryvertex in the support has to be zero or nonzero and the basis function in physical space has tobe selected accordingly.
As, in contrast to e.g. the Laplace equation, no norm equivalence of the product waveletfunctions holds with respect to the energy norm and therefore the wavelets do not compensate thedifficulties in the discretization with providing a well-conditioned linear system, we replaced theH1(D)-stable wavelet decomposition in physical space by the simpler hierarchical hat functiondecomposition as described in section 2.3.2 and use thresholding techniques despite the fact thatno norm equivalences hold with respect to the H1,0(Ω)-norm.
When constructing an adaptive space based on thresholding techniques, either a solution-based or a residual-based strategy can be pursued. We have decided to use a simple solution-based algorithm to qualitatively test the feasibility and efficiency of such an approach to con-struct an adaptive sparse tensor product space as described in section 3.2. The goal is to obtaina subspace of a sparse tensor product space that provides an approximation as close to a bestN-term approximation as possible while maintaining complete trees in the hierarchy of the spacewith respect to physical space as well as to solid angle.
The algorithm proceeds similarly to the refinement of the sparse tensor product space withthe difference that only those product basis functions are refined where the absolute value ofthe corresponding coefficient of the solution is above a prescribed threshold.
We start with an initial sparse tensor product space of level l and compute the solution asdescribed in chapter 6. Then, based on the coefficients of the solution on level l, the space isrefined such that the new space is an adaptive sparse tensor product space on level l + 1 asdescribed in section 3.2.5 and the approximate solution in the new space is computed. Thisprocedure is repeated until the required refinement level is reached.
3.2.5 Level Refinement
Given an (adaptive) sparse tensor product space V lA of level l, an adaptive sparse tensor product
space V l+1A of the next finer level l + 1 is constructed as follows:
First, those degrees of freedom in V lA that are not already refined in both physical space
and solid angle are marked and, based on this information, the meshes in both sub-domains arerefined such that all triangles in the support of the single space basis functions to be createdare added to the triangulations. In a next step, all basis functions that correspond to a possiblesphere-child in solid angle or a possible space-child in physical space, respectively, are added tothe hierarchical dictionaries. Then, each marked product basis function is refined in space andsolid angle such that all sphere- and space-children of the product function, which in additionare contained in V l+1
0 , are contained in the space, including all the ancestors of the new productbasis functions.
To be more precise, when a product basis function ϕ(x)ψ(s) of level lD in physical space and

68 3.2. ADAPTIVE SPARSE TENSOR PRODUCT SPACE
level lS in solid angle, all the sphere children ϕ(x)ψ′(s) and all the space ϕ′(x)ψ(s) that satisfy
ϕ(x)ψ′(s) ∈ V lD+lS+10 ∧ ϕ(x)ψ′(s) <S ϕ(x)ψ(s),
ϕ′(x)ψ(s) ∈ V lD+lS+10 ∧ ϕ′(x)ψ(s) <D ϕ(x)ψ(s),
are included in the space, including all the sphere-parents and space-parents of these newlyadded basis functions ϕ(x)ψ′(s) and ϕ′(x)ψ(s) as described in the definition of adaptive sparsetensor product spaces in section 3.2.3. Finally, the passive basis functions that are used for thematrix-vector multiplication are added to the space.
When implementing the adaptive refinement strategy, several aspects additional to the sparsetensor product construction have to be considered. On the one hand, not only basis functionsof the currently finest product levels (lS + lD = l) are refined but also product functions oncoarser product levels (lS + lD < l) may need to be refined as their coefficient may exceedthe threshold after a refinement step. This requires flexible data structures for meshes as wellas hierarchical dictionaries and adaptive sparse tensor product subspaces to be able to storeadditional mesh data or basis functions at any required moment at any refinement level. On theother hand, as not all basis functions of the sparse tensor product space V l
0 are included in thespace, ancestors of newly added product basis functions are not guaranteed to already belongto the space as required for an adaptive sparse tensor product space as defined in section 3.2.Therefore, for the refinement with respect to physical space, before the space-children of a basisfunction are created, the sphere-parents of the product function to be refined are space refinedand it is ensured that all the required space-parents are present. In the same way, for therefinement with respect to solid angle, before the sphere-children of a basis function are created,the space-parents of the product function to be refined are sphere refined.

Part II
Algorithms and Implementation
69


Chapter 4
Program Overview
In this chapter the program structure of the C++ implementation that was used to carry outthe numerical experiments in part III is presented. It starts with some information about theprogram input, followed by a brief description of main tasks that are carried out in order tocompute a solution for a given radiative transfer problem. Details of the algorithms that allowan efficient computation of an approximation of the radiation intensity with the discretizationsdescribed in part I can be found in the following chapters. The space construction and solutionalgorithms for non-adaptive spaces are contained in chapters 5 and 6, while in chapter 3 theadaptive space refinement is described. As the implementation of the preconditioner for theadaptive case is a very tedious task, the feasibility of efficient preconditioning for the adaptivesparse tensor product method is to date open.
4.1 Program Input
In order to compute the intensity for a given radiative transfer problem with the sparse tensorproduct method, the following input information is required:
• Mesh data of the domainThe coordinates and elements (triangles) of the coarsest mesh in physical space have tobe provided in input files. To date the implementation can handle domains in the shapeof convex polygons or circles.
• Mesh data of the solid angleThe coordinates and elements (spherical triangles) of the coarsest mesh in solid angle haveto be provided in input files. The mesh has to cover the full unit sphere.
• Level L of the sparse tensor product spaceAs the counting of the levels starts at 0, L is the maximum refinement level of the sparsetensor product space. For the adaptive sparse tensor product space, L is the level fromwhich the adaptive refinement starts from. In this case the number of adaptive refinementsteps is specified by a second parameter noOfRef.
• Temperature distributionThe temperature distribution has to be specified as a subclass of the abstract classTemperatureField, where the function get temp has to be implemented for the two caseswhere the function input is either a Vertex or an Element and the internal coordinates atwhich the function has to be evaluated.
• Blackbody intensityThe blackbody intensity is set by implementing a subclass of the abstract class
71

72 4.2. SETUP OF THE MESHES
BlackbodyEmission. There, the blackbody intensity has to be provided as a function oftemperature.
• Absorption coefficientFor the absorption coefficient, there is an abstract class Absorption from which a newclass has to be derived to specify the absorption coefficient as a function of temperature.
• Stabilization weighting functionThe function ε(x) that is used as a weighting function in the least-squares formulation isimplemented as a subclass of the abstract class Stabilization, specifying the stabilizationparameter as a function of the absorption coefficient κ. We suggest the stabilization (2.4).However, any weighting function could be used instead.
• Quadrature rulesFor the computation of the element matrices, numerical integration is used in physicalspace as well as solid angle. The abstract base class provides an interface for a generalquadrature rule for any type of element. The subclass Triangle2d3pointrule that isused in the numerical experiments implements the quadrature rule where the mean of thesquares of the three edge midpoint values are weighted with the area of the triangle. Thisquadrature rule can be applied to any type of 2d triangle (normal triangles, triangles withcurved boundaries, spherical triangles). Different quadrature rules might be applied inphysical space and in solid angle.
• Parameters for the CG methodThe maximum number of iterations maxit (in the adaptive case on each refinement level)as well as the tolerance cgtol for the relative error in the energy norm
‖b−Ax‖A ≤ cgtol · ‖b‖A
have to be specified as stopping criteria for solving the linear system Ax = b .
• PreconditionerNew preconditioners for the CG method can be implemented as subclasses of the abstractclass Preconditioner. In part III, the CG method without preconditioning(No Preconditioner) is compared with the subspace correction preconditioner(Subspace Corr Preconditioner) described in section 6.2.
• Output filesThe output such as incident radiation or net emission distributions are written to differentfiles that have to be specified.
4.2 Setup of the Meshes
Based on the input information of the meshes, hierarchical meshes Hier Trianglemesh2d andHier SphereTrianglemesh of level L (starting at level 0) are constructed. These constructionsare tree-based in the way that each hierarchical triangle and each hierarchical edge knows itsparent and children. Furthermore, triangles have pointers to their edges and vertices, edges havepointers to their vertices and adjacent triangles of the same level and vertices have lists of theiradjacent triangles and edges of the same level. If a triangle is at the boundary of the physicaldomain D, it is replaced by an instance of the subclass BoundaryTriangle2d, a vertex at theboundary by a BoundaryVertex2d and an edge by a BoundaryEdge2d.

CHAPTER 4. PROGRAM OVERVIEW 73
4.3 Setup of the Sparse Tensor Product Space
Before constructing the sparse tensor product space, the two component spaces (SingleSpace)are constructed. In physical space, we use the space of continuous, piecewise linear functions(LinFEMTriangle2d) and in solid angle the space of discontinuous, piecewise constant func-tions (ConstFEMSphereTriangle) as described in section 2.3.2. In the constructors of thesetwo single spaces, the shape functions (subclasses of ShapeFunction) are set and the finite el-ements (Triangle elem) on the finest mesh levels and the dictionaries of basis functions arecreated. In physical space, the dictionary consists of hat functions on different refinement levels(HatSpace2d BasisFunction) and in solid angle of characteristic functions on different refine-ment levels CharFctSphere BasisFunction as well as of Haar wavelets(HaarWavSphere BasisFunction).
The sparse tensor product space is then set up by combining single space basis functions(SingleSpace BasisFunction) from the two single spaces to tensor product basis functions(TP BasisFunction) as described in chapter 5.
4.4 Setup of Stiffness Matrix and Right Hand Side
Analogously to the construction of the sparse tensor product space from single spaces, we firstset up the matrices and right hand sides of the single spaces before composing the sparse ten-sor product matrix and right hand side. When setting up the matrices and vectors for thephysical space, we first specify the nine bilinear forms of functions in x (which are subclassesof Space2dBilinearForm) used in the bilinear form (2.7) and the three linear forms of func-tions in x (subclasses of Space2d LinearForm) used in the source functional (2.8). For each ofthe bilinear forms a matrix (Space2d Matrix) is created. In the same way, we specify the sixbilinear forms and three linear forms in solid angle and create the six corresponding matrices(Sphere Matrix). The pointers to the nine matrix pairs and the three pairs of linear forms arethen added to the sparse tensor product matrix (STP Matrix) and the pointers to the linearforms are stored in vectors, based on which the right-hand side for the linear system is built.
4.5 Solving the Linear System
As the setup of the full stiffness matrix that arises from the Galerkin discretization (2.14) requiresmore that O(dimV L
0 ) matrix entries, an iterative solver is required in order to obtain overallcomputational costs that are almost proportional to the number of degrees of freedom in thediscretization. As the bilinear form is symmetric and positive definite, we use the conjugategradient method to solve the linear system. Unfortunately, the convergence rate deterioratesrapidly when the sparse tensor product space is refined (section 7.3). Algorithms for efficientmatrix-vector multiplication and preconditioning - that can be carried out at a complexity thatis proportional or almost proportional to the number of unknowns in the sparse tensor productdiscretization - are therefore key ingredients. The matrix-vector multiplication is described insection 6.1 and preconditioning in section 6.2.
4.6 Update of the Adaptive Sparse Tensor Product Space
If the space is to be refined adaptively, after the linear system has been solved on the coarsestlevel, all degrees of freedom where the absolute value of the coefficient is above the specifiedthreshold are marked. Then the meshes in physical space as well as solid angle are refined wherenecessary, the basis sets are extended by the required single space basis functions and the marked

74 4.7. POSTPROCESSING
tensor product functions are refined with respect to physical space as well as solid angle. Finally,the single space matrices are updated and the linear system is solved again. This procedure isthen repeated until the required adaptive refinement level is reached. The key algorithms forthe adaptive sparse tensor product space refinement are presented in chapter 3.
4.7 Postprocessing
When the solution on the final refinement level is computed, the quantities specified in theprogram such as incident radiation, heat flux or net emission are computed and written to thecorresponding output files.

Chapter 5
Construction of the Sparse Tensor
Product Space
In contrast to standard sparse grids where the computational domain is a product of identicalone-dimensional domains, the construction of a sparse tensor product space as defined in section2.3.2 poses two major challenges. Firstly, the two underlying spaces are not identical and ofdimension greater than one, which complicates the setup of the mesh structures and the spaces.Secondly, due to the zero inflow boundary conditions, the space is - strictly speaking - not a tensorproduct space, which requires hierarchical dictionaries instead of bases in the two underlyingspaces.
The main difficulty arises from strongly enforcing the boundary conditions and replacingbases by dictionaries. In physical space a degree of freedom corresponds to a vertex and in solidangle a degree of freedom can be identified with a spherical triangle on the finest level. As aconsequence of using dictionaries instead of bases, however, for a given (vertex, triangle)-pairthere may be several options to select a pair of basis functions as several functions in a dictionarymay correspond to the same vertex in physical space or the same spherical triangle in solidangle, respectively. The choice of a basis function depends on whether the basis functions thatcorrespond to the coarser level in either physical space or solid angle are contained in the sparsetensor product space. Therefore, the selection of product basis functions when constructing asparse tensor product space is a key issue.
In this chapter, the algorithms to construct the sparse tensor product space as defined insection 2.3.2 are presented. The code fragments are slightly modified extracts from the C++-implementation that is used for the numerical experiments in chapter 7. All modifications ofthe code fragments have been made to show the structure of the implementation more clearly.The chapter finishes with some comments about the implementation of the graded sparse tensorproduct space as defined in section 2.4.
Additional challenges are posed when introducing adaptive space refinement. The algo-rithms to construct the adaptive sparse tensor product spaces that are used for the numericalexperiments in chapter 8 are described in chapter 3.
5.1 Iterative Space Construction
As mentioned in section 4.3 in the previous chapter, the hierarchical meshes and the dictionariesof the two single spaces are available when the sparse tensor product space is constructed. Asthe space is of multilevel structure, it is natural to proceed levelwise, starting with level L = 0.To construct the subspace V 0
0 , all product basis functions
ϕ0iD
(x)ψ0iS
(s), iD ∈ I(0), iS ∈ J(0),
75

76 5.1. ITERATIVE SPACE CONSTRUCTION
1 // Refinement up to l e v e l L a f t e r c on s t ru c t i n g the space on l e v e l 0for ( int r e f l e v e l =0; r e f l e v e l <L ; r e f l e v e l ++)
3 // I t e r a t i on over a l l deg ree s o f freedom wi th// s pa c e 2d l e v e l+s p h e r e l e v e l==r e f l e v e l
5 for ( int s p ac e2d l ev e l =0; s p ac e2d l ev e l<=r e f l e v e l ; s p ac e2d l ev e l ++)int s p h e r e l e v e l=r e f l e v e l −s p ac e2d l ev e l ;
7 for ( int spher e n r =0; sphere nr<s p h e r e r o o t b f [ s p ac e2d l ev e l ] . . .[ s p h e r e l e v e l ] . s i z e ( ) ; spher e n r++)
9 // I f po in t e r i s a nu l l po inter−>nothing to be donei f ( s p h e r e r o o t b f [ s p ac e2d l ev e l ] [ s p h e r e l e v e l ] [ spher e n r ]==0)
11 continue ;TP BasisFunction i n n e r b f=sph e r e r o o t b f [ s p ac e2d l ev e l ] . . .
13 [ s p h e r e l e v e l ] [ spher e n r ] ;do
15 //Temporary s torage o f the next degree o f freedom in spaceTP BasisFunction∗ nex t i nn e r b f=inner b f−>
17 g e t n e x t s p a c e 2d b a s i s f ( ) ;// re f inement w. r . t . p h y s i c a l space and s o l i d ang le
19 i nner b f−>s p ac e2d r e f i n e ( . . . ) ;i nner b f−>s p h e r e r e f i n e ( . . . ) ;
21 i n n e r b f=nex t i nn e r b f ;
23 while ( i n n e r b f !=0) ;// end f o r sphere nr
25 //end f o r s p a c e 2d l e v e l// end f o r r e f l e v e l
Listing 5.1: Code extract of levelwise sparse tensor product space refinement.
from the dictionaries of level 0 that in addition do not violate the boundary conditions are addedto the space. The ones that do violate the boundary conditions are temporarily stored as passivetensor product functions.
After the space on level 0 has been created, it is iteratively extended from the sparse tensorproduct space of level l to the space of level l + 1 for l = 0, 1, .., L − 1 until the final refinementlevel L is reached. With the adaptive refinement strategy in mind, the space refinement fromlevel l to level l + 1 is carried out by refining all the product basis functions on level
(lD, lS) = (lD, l − lS), lD ≤ l,
with respect to space as well as solid angle, creating basis function of level (lD + 1, lS) and(lD, lS + 1).
As the refinement is carried out from the local perspective of a tensor product basis function,the key entity to construct the sparse tensor product space is the class TP BasisFunction
(Listing 5.2), where all the information that is needed to decide which refined basis functionshave to be created and added to the space must be provided. An extract of the levelwise tensorproduct function-based refinement implementation is given in Listing 5.1.

CHAPTER 5. CONSTRUCTION OF THE SPARSE TENSOR PRODUCTSPACE 77
class TP BasisFunction2 private :
// S ing l e spaces4 Space2d BasisFunction ∗ s p ac e2d ba s i s f ;
Sphere Bas i sFunct ion∗ s p h e r e b a s i s f ;6 // Pointers to c h i l d r en and ance s tor s
TpV space2d ch i ld r en , space2d parents , s ph e r e ch i l d r en ,8 sphere parents , space2d grand parents ;
// Linked l i s t s10 TP BasisFunction ∗ next space2d b f , ∗ next spher e b f ,
∗ prev space2d b f , ∗ p r ev sph e r e b f ;12 TP BasisFunction ∗ nex t a c t i v e sp ac e2d b f ,∗ nex t a c t i v e sph e r e b f ,
∗ p r ev ac t i v e sp ac e2d b f ,∗ p r e v a c t i v e s p h e r e b f ;14 // Set parents when c r ea t i n g a new b a s i s f unc t i on
void s p h e r e ch i l d s e t s p a c e 2d p a r en t s ( . . . ) ;16 void s p h e r e ch i l d s e t s p h e r e p a r en t s ( . . . ) ;
void s p a c e 2d ch i l d s e t s p h e r e p a r en t s ( . . . ) ;18 void s p ac e2d ch i l d s e t s p ac e2d pa r en t s ( . . . ) ;
bool s e l e c t b a s i s f u n c t i o n s ( . . . ) ;20 //Add t h i s product func t i on to the l i n k e d l i s t s
void SetRootsAndIterator s ( . . . ) ;22 . . .
public :24 //Refinement o f t h i s b a s i s
void s p ac e2d r e f i n e ( . . . ) ;26 void s p h e r e r e f i n e ( . . . ) ;
. . .28 ;
Listing 5.2: Code extract of class TP BasisFunction.

78 5.2. REFINEMENT OF A PRODUCT BASIS FUNCTION
5.2 Refinement of a Product Basis Function
For a given product basis function the set of all possible children from the tensor product ofthe two dictionaries DD and DS are the space children and sphere children specified in section3.2.2. However, in contrast to a standard sparse grids discretization, only a subset of thesepossible children are created and added to the space when a product basis function is refined.One reason for this is that not all possible children are contained in the sparse tensor productspace as defined in section 2.3.2 and another reason is that as a child has several parents inphysical space as well as in solid angle, it might already have been created by another parent.
In order to ensure that after a level refinement step all product basis functions in the sparsetensor product space V l+1
0 of refined level l+1 are included in the space, a product basis functionof level
(lD, lS) = (lD, l − lS), lD ≤ l,
has to create at most the following children. Let v and T denote vertex and triangle thatcorrespond to the product basis function to be refined. If the product basis function is active,for the refinement with respect to physical space, it is sufficient to create all space-children thatcorrespond to midpoints of adjacent edges to v of level l. If the product basis function is passive,the space may also require that the space-child that corresponds to v itself is added to the space(Listing 5.3). For the refinement in solid angle, there are three different cases. If the productbasis function is active and the basis function in solid angle is a wavelet with four triangles in itssupport, it is sufficient to create twelve sphere-children that correspond to the corner trianglesof the refined triangles of the four triangles in the support. If the product function is activeand the basis function in solid angle is a characteristic function, it is sufficient to create threesphere-children that correspond to the corner triangles of the refined triangles of T and if theproduct function is passive, the space may require four sphere-children that correspond to thefour sub-triangles of T (Listing 5.4).
As the degrees of freedom in the sparse tensor product space correspond to the verticesin physical space and to triangles in solid angle, a tensor product function is identified withits (vertex, triangle)-pair combined with its levels (lD, lS) and for each such pair at most oneproduct basis function is added to the sparse tensor product space. Based on the informationof the hierarchical mesh structures and the children that are already contained in the space, aproduct basis function that is to be space- or sphere-refined determines (vertex,triangle)-pairsbased on which new product basis functions have to be added to the refined sparse tensorproduct space. While - when using hierarchical hat functions - the basis function in physicalspace is always the hat function on level lD that corresponds to the vertex, the basis function insolid angle - if the triangle is one of the three corner triangles of its parent-triangle, there is thechoice between a Haar wavelet and a characteristic function. This choice depends on whetherthe sphere-parents of the new product basis function are active functions in the sparse tensorproduct space.
For each newly created child all parents have to be found and a pointer from each parent tothe new child is set in order to avoid that a parent that had been missed out creates the samechild again. When creating a space- or a sphere-child (Listings 5.5 and 5.6), these space- andsphere-parents of the new product basis function are determined before the single space basisfunctions are selected.
The levelwise construction of the sparse tensor product space guarantees that all space- andsphere-parents of a new product basis function of level l+1 are already included as either activeor passive functions in the sparse tensor product space V l
0 . These ancestors can therefore be de-termined using the information of the space hierarchy provided by the class TP BasisFunction.

CHAPTER 5. CONSTRUCTION OF THE SPARSE TENSOR PRODUCTSPACE 79
void s p ac e2d r e f i n e ( . . . ) 2 . . .
// I t e r a t i on over ne i ghbor ing t r i a n g l e s o f v e r t e x t ha t corresponds4 // to the b a s i s f unc t i on to be r e f i n ed
for ( l i s t <Edge∗> : : i t e r a t o r e d g e i t=e d g e l i s t . begin ( ) ;6 ed g e i t != e d g e l i s t . end();++ ed g e i t )
// Each midpoint cou ld correspond to a new c h i l d ( i f i t8 // does not e x i s t ye t )
Vertex ∗ midpoint = (∗ ed g e i t )−>get mid po in t ( ) ;10 bool point found=fa l se ;
//Check , whether the midpoint corresponds to an a l ready e x i s t i n g12 // c h i l d o f the current b a s i s f unc t i on .
//Loop over e x i s t i n g space ch i l d r en14 for (TpVIt c h i l d i t=spac e2d ch i l d r en . begin ( ) ;
c h i l d i t != spac e2d ch i l d r en . end ( ) ; c h i l d i t ++)16 i f ( midpoint==(∗ c h i l d i t )−>ge t sp ac e2d b f ()−>ge t v e r t ex ( ) )
point found=true ;18 break ;
// end i f20 // end f o r c h i l d i t
i f ( po int found==fa l se )22 c r ea t e n ew spac e2d ch i l d ( . . . ) ; // end i f po in t f ound
24 // end for−l oop over ad jacen t edges o f v e r t e x// I f b a s i s f unc t i on to be r e f i n ed i s not ac t i v e , a c h i l d i s c rea t ed
26 // t ha t corresponds to the same v e r t e x .i f ( ! this−>i s a c t i v e ( ) )
28 c r eate new same ver tex space2d ch i ld ( . . . ) ;// end i f
30 Listing 5.3: Code extract of space refinement of a tensor product basis function.

80 5.2. REFINEMENT OF A PRODUCT BASIS FUNCTION
void s p h e r e r e f i n e ( . . . ) 2 . . .
// An i n a c t i v e b a s i s f unc t i on has four ( a c t i v e or pa s s i v e )4 // sphere−ch i l d r en
i f ( ! this−> i s a c t i v e ( ) )6 //The sphere ch i l d r en are c rea ted i f necessary
ch e c k and c r e a t e f o u r s p h e r e ch i l d r e n ( . . . ) ;8
else 10 //An ac t i v e c h a r a c t e r i s t i c f unc t i on has three ch i l d r en
i f ( s ph e r e ba s i s f−>g e t i n d i c e s ()−> s i z e ()==1)12 //The sphere ch i l d r en are c rea ted i f necessary
ch e c k and c r e a t e t h r e e s p h e r e ch i l d r e n ( . . . ) ;14
else 16 //A Haar wave l e t f unc t i on has twe l v e c h i l d r en
//The sphere ch i l d r en are c rea ted i f necessary18 this−>ch e ck and c r ea t e twe l v e sph e r e ch i l d r en ( . . . ) ;
//end i f−e l s e20 //end i f−e l s e
. . .22
Listing 5.4: Code extract of sphere refinement of a tensor product basis function.
void c r ea t e n ew spac e2d ch i l d ( . . . )2
//Create new b a s i s f unc t i on4 (∗ ch i l d )= new TP BasisFunction ( r e f s t e p ) ;
(∗ ch i l d )−>s e t max l ev e l ( this−>get max l eve l ( ) ) ;6 // Set a l l parents o f new b a s i s f unc t i on s
s p a c e 2d ch i l d s e t s p h e r e p a r en t s ( . . . ) ;8 s p ac e2d ch i l d s e t s p ac e2d pa r en t s ( . . . ) ;
// Set s i n g l e space b a s i s f unc t i on s from d i c t i o n a r i e s10 // in ph y s i c a l space and s o l i d ang le
bool to be removed = (∗ ch i l d )−> s e l e c t b a s i s f u n c t i o n s ( . . . ) ;12 i f ( to be removed ) delete (∗ ch i l d ) ; return ;
(∗ ch i l d )−> s e t a c t i v i t y f l a g ( ) ;14 //Add new b a s i s func t i on to l i n k e d l i s t s
(∗ ch i l d )−>SetRootsAndIterator s ( . . . ) ;16 return ;
Listing 5.5: Code extract of subroutine of space2d refine() that creates a new space-child.

CHAPTER 5. CONSTRUCTION OF THE SPARSE TENSOR PRODUCTSPACE 81
1 void c r ea t e n ew sph e r e ch i l d ( . . . )
3 //Create new b a s i s f unc t i on(∗ ch i l d )= new TP BasisFunction ( r e f s t e p ) ;
5 (∗ ch i l d )−>s e t max l ev e l ( this−>get max l eve l ( ) ) ;// Set a l l parents o f new b a s i s f unc t i on s
7 s p h e r e ch i l d s e t s p h e r e p a r en t s ( . . . ) ;s p h e r e ch i l d s e t s p a c e 2d p a r en t s ( . . . ) ;
9 // Set s i n g l e space b a s i s f unc t i on s from d i c t i o n a r i e s// in ph y s i c a l space and s o l i d ang le
11 bool to be removed = (∗ ch i l d )−> s e l e c t b a s i s f u n c t i o n s ( . . . ) ;i f ( to be removed ) delete (∗ ch i l d ) ; return ;
13 (∗ ch i l d )−> s e t a c t i v i t y f l a g ( ) ;//Add new b a s i s func t i on to l i n k e d l i s t s
15 (∗ ch i l d )−>SetRootsAndIterator s ( . . . ) ;return ;
17 Listing 5.6: Code extract of subroutine of sphere refine() that creates a new sphere-child.
5.3 Space Data Structures and Iterators
The sparse tensor product space is stored in a tree-based data structure with respect to theproduct function hierarchy in physical space and solid angle. However, some algorithms to solvethe linear system described in chapter 6 require for any fixed basis function in either single spaceiterations over either all or all active product basis functions that are composed of this singlespace basis function and any single space basis function of the other component space of a givenlevel l. Therefore, the tree-based data structure is complemented by doubly linked lists withinthese subspaces. The roots of these iterators are stored in multidimensional arrays where thefirst dimension refers to the space level, the second dimension to the sphere level and the thirddimension to the level index of a basis function in either physical space or solid angle (Fig. 5.1).There are four of types of lists.
vector<vector<vector<TP_BasisFunction*>>> sphere_root_bf
vector<vector<vector<TP_BasisFunction*>>> space2d_root_bf
vector<vector<vector<TP_BasisFunction*>>> active_sphere_root_bf
vector<vector<vector<TP_BasisFunction*>>> active_space2d_root_bf
The first two allow iterations over all product basis functions in the subspace of interest, wherethe last two contain only the active product basis functions.
5.4 Construction of the Graded Sparse Tensor Product Space
The implementation of the graded sparse tensor product space is to date open. In contrast tothe sparse tensor product space described above, the sum of the levels is increased up to 2Linstead of L towards the transition zone γ between inflow and outflow boundary. This affectsthe refinement routines in the sense that, as the maximum refinement level of a product functiondepends on the position in the product domain, only some of the possible children that are closerto the transition line might have to be created.
Possible options for the data structure would be either a union of L+1 sparse tensor productspaces on sub-domains of Ω of different refinement level and mesh width of the coarsest mesh or

82 5.4. CONSTRUCTION OF THE GRADED SPARSE TENSOR PRODUCT SPACE
levels (0,0) levels (0,1) levels (0,2)
levels (1,0) levels (1,1)
levels (2,0)
space_root[2][0][sp
hereidx]
sphere_root[2][0][spaceidx]
space_root[1][0][sp
hereidx]
space_root[1][1][sp
hereidx]
space_root[0][0][sp
hereidx]
space_root[0][1][sp
hereidx]
space_root[0][2][sp
hereidx]
sphere_root[0][0][spaceidx]
sphere_root[1][0][spaceidx]
sphere_root[0][1][spaceidx]
sphere_root[1][1][spaceidx]
sphere_root[0][2][spaceidx]
Figure 5.1: For any single space basis function in physical space on level lD with level index iDthere are lists that allow to iterate over all basis functions that are products of this single spacebasis function and any sphere basis function of level lS , 0 ≤ lS ≤ L − lD, where the head ofthe list is stored in the three-dimensional array sphere root bf[lD][lS ][iD]. Analogously, thereexist iterators that allow to iterate over product functions with identical sphere basis functions.The head of the list with product basis functions of levels (lD,lS) with fixed sphere level indexiS is stored in space root bf[lD][lS ][iS ].
an extension of the current space that includes all product subspaces (some of them with veryfew basis functions) where the sum of the levels is up to 2L. A challenge to the first option wouldbe to properly store the basis functions at the sub-domain interfaces, in particular when coarserbasis functions than the coarsest mesh width in the finer space are required. The second optionrequires a more flexible data structure and, for both options the matrix-vector multiplication(section 6.1) would have to be adapted.

Chapter 6
Solver
Setting up the full NL-dimensional stiffness matrix from the least-squares variational formu-lation (2.9), with NL being the number of degrees of freedom in the standard sparse tensorproduct discretization, and using a standard direct linear solver would lead to computationalcosts proportional to up to O(N 3
L). An alternative is the use of an iterative method. As thebilinear form (2.7) is symmetric and positive definite with respect to the ‖ ‖S-norm (2.6), theconjugate gradient solver (CG) is the straightforward method of choice.
However, the convergence rate of the CG solver can deteriorate drastically when the level L ofthe sparse tensor product space is increased (section 7.3) and efficient preconditioning is essentialto obtain the desired computational complexity of O(NL). Furthermore, the NL-dimensionalstiffness matrix contains at least O(2(d1+d2)L) matrix entries, which makes it impossible to obtaincomputational costs that are proportional to the number of degrees of freedom in the sparsetensor product space when this full stiffness matrix is used. In order to be able to solve thelinear system at optimal computational costs, the number of operations to carry out a matrix-vector multiplication has to be proportional to NL and the number of CG-iterations has to beindependent of the refinement level L.
In section 6.1.1 we explain how the matrix-vector multiplication can be carried out effi-ciently for two-dimensional sparse grid spaces that are tensor product constructions of twoone-dimensional spaces (see also e.g. [7] or [18, Chap. 6]). In sections 6.1.2 and 6.1.3, theadaptations for the sparse tensor product space and the adaptive sparse tensor product spaceare explained.
For standard sparse grid approximations to for example solve the Laplace equation withwavelet finite elements, simple diagonal preconditioning guarantees that the number of CG-iterations is bounded from above as L → ∞. However, these techniques require norm equiv-alences between the energy norm of a function and the l2-norm of its (wavelet) coefficients.While (pre-)wavelet product basis functions that satisfy the norm equivalence with respect tothe H1,0(Ω)-norm are easy to find, no product basis functions where the norm equivalence holdswith respect to the energy norm of the least-squares formulation (2.9) or the ‖ ‖S -norm areavailable. Therefore, there is no guarantee that the number of iteration steps using diagonalpreconditioning is independent of the refinement level. This pessimistic result has been con-firmed by numerical experiments. Instead of diagonal preconditioning, we therefore follow [40]and suggest a multiplicative subspace correction preconditioner described in section 6.2 thatsignificantly reduces the number of iteration steps of the scheme. A proof of an upper boundfor number of CG iterations of the preconditioned system, however, is until now not available.So far, the multiplicative subspace correction preconditioner has only been tested for the sparsetensor product space. Its implementation and performance for the graded or adaptive sparsetensor product space are to date open.
83

84 6.1. MATRIX-VECTOR MULTIPLICATION
6.1 Matrix-Vector Multiplication
In order to obtain an algorithm that solves the linear system at computational costs that are(nearly) proportional to the number of degrees of freedom NL in the discretization, we haveto exploit the tensor product structure of the matrix and apply an iterative solver that onlyrequires matrix-vector multiplications instead of storing the complete stiffness matrix of thelinear system, as this matrix of dimensions NL × NL contains at least O(2(d1+d2)L) non-zeroelements.
6.1.1 Matrix-Vector Multiplication for Sparse Grids
A standard two-dimensional sparse grid space is based on a hierarchical basis of the two (iden-tical) underlying one-dimensional spaces
ϕli(x), l = 0, 1, ..., i ∈ I(l),
where I(l) is the index set of basis functions of level l. The two-dimensional sparse grid spacethen consists of all combinations of basis function ϕl1
i1(x)ϕl2
i2(y) such that the sum of the levels
is smaller or equal to L.
spanϕl1i1
(x)ϕl2i2
(y), l1 + l2 ≤ L, i1 ∈ I(l1), i2 ∈ I(2)
Let us assume that the bilinear form a(u, v) separates for product functions u(x, y) =u1(x)u2(y) and v(x, y) = v1(x)v2(y) into a product of a bilinear form of functions in x anda bilinear form of function in y.
a (u1(x)u2(y), v1(x)v2(y)) = b (u1(x), v1(x)) · c (u2(y), v2(y))
The stiffness matrix that results from the sparse grid discretization is then of tensor productstructure and the linear system reads
∑
l1+l2≤Li1∈I(l1)i2∈I(l2)
Bl′1,l1i′1,i1Cl′2,l2
i′2,i2ul1,l2
i1,i2= f
l′1,l′2i′1,i′2
, l′1 + l′2 ≤ L, i′1 ∈ I(l′1), i′2 ∈ I(l′2),
where B and C are the stiffness matrices from the bilinear forms b(., .) and c(., .) with matrixelements
Bl′1,l1i′1,i1
= b(ϕl1i1, ϕ
l′1i′1
), Cl′2,l2i′2,i2
= c(ϕl2i2, ϕ
l′2i′2
)
and f is the load vector
fl′1,l′2i′1,i′2
= f(ϕl′1i′1, ϕ
l′2i′2
).
Thanks to the tensor product structure of the linear system, in order to carry out the matrix-vector multiplication we can proceed as follows: in a first step the matrix B can be applied tothe sparse grid ’vector’ u by summation over all index pairs (l1, i1) for each fixed index pair(l2, i2). In a second step the matrix C can be applied by summation over the index pairs (l2, i2)for each fixed index pair (l′1, i
′1). The drawback of this strategy is that the intermediate state
vl′1,l2i′1,i2
=∑
l1≤L−l2i1∈I(l1)
Bl′1,l1i′1,i1
ul1,l2i1,i2
.

CHAPTER 6. SOLVER 85
contains index sets (i′1, l′1, i2, l2) where l′1 + l2 > L, which means that additional storage space
compared with the sparse tensor product space is required and the complexity is not proportionalto the number of degrees of freedom in the sparse grid space.
To solve this problem, the matrix C is decomposed into an upper part and a lower part [18,Chap. 6.3] such that
C = Cupper + Clower
and
(Cupper)l′2,l2i′2,i2
= 0 for l′2 > l2,
(Clower
)l′2,l2
i′2,i2= 0 for l′2 ≤ l2.
With this decomposition the matrix-vector multiplication is split into an upper multiplicationand a lower multiplication
∑
l1+l2≤L,i1∈I(l1),i2∈I(l2)
Bl′1,l1i′1,i1
(Cupper)l′2,l2i′2,i2
ul1,l2i1,i2
︸ ︷︷ ︸upper multiplication
+∑
l1+l2≤L,i1∈I(l1),i2∈I(l2)
(Clower)l′2,l2i′2,i2Bl′1,l1
i′1,i1ul1,l2
i1,i2
︸ ︷︷ ︸lower multiplication
with l′1 + l′2 ≤ L, i′1 ∈ I(l′1), i′2 ∈ I(l′2).We now define the partial matrix-vector multiplications B ·p u and C ·p u, where B is a matrix
that is applied to the first dimension of u and C a matrix that is applied to the second dimensionof u, as the matrix-multiplications where only values that correspond to a degree of freedom inthe sparse grid space are evaluated.
v = B ·p u⇔ vl′1,l2i′1,i2
=
∑l1≤L−l2i1∈I(l1)
Bl′1,l1i′1,i1
ul1,l2i1,i2
, l′1 + l2 ≤ L
0, otherwise(6.1)
v = C ·p u⇔ vl1,l′2i1,i2
=
∑l2≤L−l1i2∈I(l2)
Cl′2,l2i′2,i2
ul1,l2i1,i2
, l1 + l′2 ≤ L
0, otherwise(6.2)
For the upper multiplication, we first carry out the summation over levels and indices of thesecond space and compute the intermediate state
vl1,l′2i1,i′2
=∑
l2≤L−l1i2∈I(l2)
(Cupper)l′2,l2i′2,i2
ul1,l2i1,i2
.
As (Cupper)l′2,l2i′2,i2
= 0 for l′2 > l2 we can restrict the summation to
vl1,l′2i1,i′2
=∑
l′2≤l2≤L−l1i2∈I(l2)
(Cupper)l′2,l2i′2,i2
ul1,l2i1,i2
.
As for the sum of the levels of the output ’vector’ holds that l′2 + l1 ≤ L, it is sufficient to carryout a partial matrix-vector multiplication
v = Cupper ·p u. (6.3)

86 6.1. MATRIX-VECTOR MULTIPLICATION
The upper multiplication is completed by carrying out the summation over level and indices ofthe first space
(uupper)l′1,l′2i′1,i′
2
=∑
l1+l′2≤Li1∈I(l1)
Bl′1,l1i′1,i1v
l1,l′2i1,i′
2
, l′1 + l′2 ≤ L, i′1 ∈ I(l′1), i′2 ∈ I(l′2).
As the result uupper is in the sparse tensor product space, a partial matrix multiplication issufficient.
uupper = B ·p v
For the lower multiplication, we first carry out the partial matrix-vector multiplication withrespect to the first space
vl′1,l2i′1,i2
=∑
l1≤L−l2i1∈I(l1)
Bl′1,l1i′1,i1
ul1,l2i1,i2
. (6.4)
As(Clower
)l′2,l2i′2,i2
= 0 for l′2 ≤ l2, the matrix-vector multiplication with respect to the second space
can be restricted to
(ulower
)l′1,l′2
i′1,i′2
=∑
l2<l′2≤L−l′1i2∈I(l2)
(Clower
)l′2,l2
i′2,i2v
l′1,l2i′1,i2. (6.5)
Therefore, only components of v that satisfy l2 + l′1 < L are required for the multiplication(6.5). As, in addition the resulting ’vector’ ulower is in the sparse tensor product space, bothmultiplications (6.4) and (6.5) can be replaced by partial multiplications.
Summing up the algorithm above, the matrix-vector multiplication is computed as
u = B ·p (Cupper ·p u) + Clower ·p (B ·p u) .
For carrying out these partial matrix-vector multiplications, the stiffness matrices B and Chave to be available. A simple way is to set up the matrices B and C from the hierarchicaldiscretization and directly access the required values in the multiplication. Due to the hierarchi-cal structure of the spaces, a basis function overlaps with O(2d(L−l)) basis functions on refinedlevels, where l is the level of the basis function. This leads to O(L2dL) nonzero matrix entriesin both B and C
#Bl′1,l1i′1,i1
;Bl′1,l1i′1,i16= 0 = O(L2d1L), #Cl′2,l2
i′2,i2; Cl′2,l2
i′2,i26= 0 = O(L2d2L).
For the case where (d1, d2) = (2, 2), the partial matrix-vector multiplication would require(L24L) = O(LNL) operations. In order to obtain computational costs that are proportional toNL, basis transformations between hierarchical and standard bases can be used.
Let us consider the partial matrix multiplication B ·p v in the first component space and letfor fixed levels l1 and l′1, with l1 ≤ l′1 ≤ L, Rl1,l′1 denote the matrix of basis change such that
ϕl1i1
(x) =∑
i′1∈J (l′1)
(Rl1,l′1
)i1,i′1
bl′1i′1
(x), i1 ∈ I(l1)
where bl′1i′1
(x) is a standard basis function on level l′1 and J (l′1) the index set of all standard basis
functions on level l′1. With Bl1s being the stiffness matrix with respect to the standard basis, Bl1

CHAPTER 6. SOLVER 87
the hierarchical stiffness matrix up to level l1 and
Rl1 :=
R0,l1
...Rl1,l1
(6.6)
we have that
Bl1 = Rl1Bl1s
(Rl1)⊤
.
For the partial matrix-vector multiplication (6.1) for each fixed basis function index pair
(l2, i2) with respect to the second space, the coefficient vector ul1,l2i1,i2
, l1 ≤ L−l2, is first multiplied
by the transformation matrix(RL−l2
)⊤. Then the stiffness matrix BL−l2
s is applied, followed by(RL−l2
)to obtain the resulting vector in hierarchical representation. The partial matrix-vector
multiplication with respect to the second component space can be carried out accordingly.
For any level 0 ≤ l2 ≤ L, the basis transformation operatorRL−l2 and its transpose(RL−l2
)⊤
can be applied to the coefficient vector ul1,l2i1,i2
, l1 ≤ L − l2, using a hierarchical reconstruction
algorithms by iterating over the degrees of freedom of the input vector for RL−l2 and by iterating
over the degrees of freedom of the output vector for(RL−l2
)⊤. Both iterative transformations
require computational costs that are proportional to the number of degrees of freedom in thevector ul1,l2
i1,i2, l1 ≤ L − l2. The overall computational costs to carry out a partial matrix-vector
multiplication is therefore proportional to NL.For an efficient application of a matrix in standard basis Bl1
s , 0 ≤ l1 ≤ L, the stiffnessmatrices with respect to the standard basis have to be available on all these levels. As thenumber of nonzero entries of a matrix of level l1 is of order 2dl1 , d being the dimension of thecomponent space, the total number of matrix entries of all L+ 1 matrices is proportional to thenumber of degrees of freedom in the single space, which satisfies the complexity requirements.
6.1.2 Matrix-Vector Multiplication for the Sparse Tensor Product Space
In contrast to standard sparse grids, the sparse tensor product space V L0 is constructed from
dictionaries instead of proper basis sets in the component spaces and the space is - strictlyspeaking - not a tensor product space due to the boundary conditions. As a result, not allcombinations of product functions from the dictionaries with lS + lD ≤ L are included in V L
0
and some values of the intermediate states (6.3) and (6.4) do not correspond to degrees offreedom in the sparse tensor product space, even if partial matrix-vector multiplications areapplied. In order to overcome this problem the sparse tensor product space is extended by allthose basis functions - called passive basis functions - that are required to store the intermediatestates which are precisely the ones within the product function dictionary where there existsat least one (active) tensor product basis function in the sparse tensor product space with theidentical basis function in physical space and overlapping domains of the basis functions in solidangle and one active tensor product function with identical basis function in solid angle andoverlapping domains of the basis functions in physical space.
Definition 6.1. (Space of Passive Product Functions V Lp )
The space of passive product basis functions V Lp is defined as
V Lp :=
ϕlD
iDψlS
iS; lD + lS ≤ L ∧
(∃ϕlD
iDψ
l′S
i′S, ϕ
l′D
i′DψlS
iS∈ V L
0 , with
µD(supp(ϕlDiD
) ∩ supp(ϕl′Di′D)) > 0 ∧ µS2(supp(ψlS
iS) ∩ supp(ψl′S
i′S)) > 0
),
where µD and µS2 are the Lebesgue-measures on D and S2, respectively.

88 6.1. MATRIX-VECTOR MULTIPLICATION
Definition 6.2. (Extended Sparse Tensor Product Space V Lext)
The extended sparse tensor product space VLext is defined as
V Lext := V L
0 ∪ V Lp
As the number of basis functions on a level l in a single space dictionary scales like 2dl asfor a hierarchical basis set, the number of product basis functions in the extended sparse tensorproduct space is of order L2maxd1,d2l as for the sparse tensor product space.
Further adaptations are required due to the fact that the two underlying spaces are notidentical and that the bilinear form consists of a sum of nine separable bilinear forms for(d1, d2) = (2, 2): four bilinear forms from the first part (ε s · ∇xu, s · ∇xv)L2 , four from themiddle parts (ε s · ∇xu, κ v)L2 + (ε κu, s · ∇xv)L2 and one from the last part (ε κu, κ v)L2 of thebilinear form (2.7). We therefore define Bm and Cm, m = 1, ..., 9, as the bilinear forms withrespect to physical space and solid angle, respectively, and denote by
RlD := RlD ,lD and S lS := SlS ,lS with (6.7)
RlD ,l′D :=
R0,l′D
...
RlD ,l′D
, lD ≤ l′D, and SlS ,l′
S :=
S0,l′S
...
S lS ,l′S
, lS ≤ l′S , (6.8)
the operators used to change the representation from hierarchical to standard basis on level lDin physical space and and level lS in solid angle, respectively, as in (6.6).
With BlDm and ClS
m being hierarchical matrices up to levels lD and lS , respectively, and Bl′Dm,s
and Cl′S
m,s the corresponding stiffness matrices with respect to standard bases on levels l′D and l′Swith l′D ≥ lD and l′S ≥ lS
BlDm = RlD ,l′
DBl′Dm,s
(RlD ,l′
D
)⊤and ClS
m = SlS ,l′SCl′S
m,s
(SlS ,l′
S
)⊤.
To apply the stiffness matrix to a sparse tensor product vector, each of the nine matrixpairs is applied separately to the vector (Algorithm 1). First, the upper part of Cm is appliedto the sparse tensor product vector (Algorithm 2). For each basis function in physical spaceϕlD
iDand for each level lS in solid angle, the transpose of the sub-matrix of basis change SlS ,lS
is applied to all contributions of active product basis functions on level lS . This is followed bythe multiplication from the left with the stiffness matrix C ls
m,s with respect to standard basison level lS . The result on level lS is transformed into hierarchical representation and all valuesthat correspond to degrees of freedom in the extended sparse tensor product space up to levellS are added to the output vector. Here, ~xact (~zall) is a vector that contains all coefficients of
active (all) product basis functions, ~xlD,lSact,iD
(~ylD ,lSall,iD
, ~zlD ,lSall,iD
) denotes a vector that for a given basis
function ϕlDiD
in physical space contains all coefficients of active (all) hierarchical functions on
level lS and ~vlS and ~wlS are vectors that contain the coefficients of standard basis functions onlevel lS . Then, the matrix Bm is applied to ~zall (Algorithm 3). For each basis function in solidangle ψlS
iSthe contributions from all hierarchical basis function up to level L− lS are multiplied
from the left by the transpose of a sub-matrix of basis change and added to a standard basisvector. After applying the stiffness matrix BL−ls
m,s with respect to standard basis on level L− lS ,the sub-matrices of basis change are applied to obtain the result with respect to the hierarchicalrepresentation and the coefficients that correspond to active degrees of freedom in the space areassigned to the output vector. The notations used in algorithm 3 are analogous to those used inthe previous algorithm 2. The lower multiplication is carried out analogously by first applyingBm to the active degrees of freedom (Algorithm 4), followed by the multiplication of the lowerpart of Cm (Algorithm 5).

CHAPTER 6. SOLVER 89
Algorithm 1 Sparse Tensor Product Matrix-Vector Multiplication V L0 → V L
0 : ~yact = A~xact
~yact ← ~0for m = 1 to 9 Loop over matrix pairs doUpper multiplication~vall ← Cupper,act→all
m ~xact
~vact ← Ball→actm ~vall
~yact ← ~yact + ~vact
Lower multiplication~vall ← Bact→all
m ~xact
~vact ← Clower,all→actm ~vall
~yact ← ~yact + ~vact
end forreturn ~yact
Algorithm 2 Upper Sphere Matrix-Vector Multiplication V L0 → V L
ext : ~zall ← Cupper,act→allm,s ~xact
~zall ← ~0for lD = 0 to L Loop over space levels do
for iD = 0 to NlDLoop over space basis functions on level lD dofor lS = 0 to L− lD − 1 Loop over sphere levels do
~vlS ←(S lS ,lS
)⊤~xlD ,lS
act,iDTransform active hierarchical contributions on level lS into
standard basis on level lS~wlS ← C lS
m,s~vlS Matrix-vector multiplication w.r.t. standard basis on level lS
for l = 0 to lS do~ylD ,l
all,iD← S l,lS ~wlS Computation of hierarchical coefficients on level l from standard
representation of level lS~zlD ,lall,iD
← ~zlD ,lall,iD
+ylD,lall,iD
Add all contributions in the extended sparse tensor productspace to the output vector
end forend for
end forend forreturn ~zall

90 6.1. MATRIX-VECTOR MULTIPLICATION
Algorithm 3 Space Matrix-Vector Multiplication V Lext → V L
0 : ~xact ← Ball→actm ~zall
for lS = 0 to L Loop over sphere levels dofor iS = 0 to NlSLoop over sphere basis functions on level lS do~vL−lS ← ~0 Vector w.r.t standard basis set to zerofor lD = 0 to L− lS Loop over space levels do
if lD > 0 then~vlD ← LlD−1→lD~vlD−1 Lifting representation from space level lD − 1 to lD
end if~vlD ← ~vlD +
(RlD,lD
)⊤~zlS ,lDall,iS
Add contributions from all degrees of freedom on levellD
end for~wL−lS ← BL−lS
m,s ~vL−lS Matrix-vector multiplication w.r.t. standard basis on level L− lSfor lD = 0 to L− lS do~xlS ,lD
act,iS← RlD ,L−lS ~wL−lS Coefficients of active hierarchical basis functions on space
level lD are computed from standard representation on level L− lSend for
end forend forreturn ~xact
Algorithm 4 Space Matrix-Vector Multiplication V Lext → V L
0 : ~zall ← Bact→allm ~xact
for lS = 0 to L Loop over sphere levels dofor iS = 0 to NlSLoop over sphere basis functions on level lS do~vL−lS ← ~0 Vector w.r.t standard basis set to zerofor lD = 0 to L− lS Loop over space levels do
if lD > 0 then~vlD ← LlD−1→lD~vlD−1 Lifting representation from space level lD − 1 to lD
end if~vlD ← ~vlD +
(RlD,lD
)⊤~xlS ,lD
act,iSAdd contributions from active degrees of freedom on
level lDend for~wL−lS ← BL−lS
m,s ~vL−lS Matrix-vector multiplication w.r.t. standard basis on level L− lSfor lD = 0 to L− lS do~zlS ,lDall,iS
← RlD ,L−lS ~wL−lS Coefficients of all hierarchical basis functions on space levellD are computed from standard representation on level L− lS
end forend for
end forreturn ~zall

CHAPTER 6. SOLVER 91
Algorithm 5 Lower Sphere Matrix-Vector Multiplication V Lext → V L
0 : ~xact ← Clower,all→actm ~zall
for lD = 0 to L Loop over space levels dofor iD = 0 to NlDLoop over space basis functions on level lD do~vL−lD−1 ← ~0 Vector w.r.t standard basis set to zerofor lS = 0 to L− lD − 1 Loop over sphere levels do
~vlS ← ~vlS +(S lS ,lS
)⊤~xlS
all Add all contributions on level lS~vlS+1 ← LlS→lS+1~vlS Lifting to higher spherelevel~wlS+1 ← ClS+1
m,s ~vlS+1 Matrix-vector multiplication w.r.t. standard basis on level lS +1~xlS+1
act ← S lS+1 ~wlS+1 Coefficients of active hierarchical basis functions on space levellS + 1 are computed from standard representation on level lS + 1
end forend for
end forreturn ~xact
6.1.3 Matrix-Vector Multiplication for the Adaptive Sparse Tensor Product
Space
If the space has been refined adaptively, we have to deal with locally refined meshes in physicalspace as well as solid angle. The discretizations can be even more irregular, as for one fixeddegree of freedom in solid angle, very many refined basis functions may be required, while foranother degree of freedom in solid angle, a very coarse resolution in the same physical areamay be sufficient. If the hierarchical matrices are set up directly, this causes no problem.However, if the strategy of change of basis is used, for an efficient matrix-vector multiplication,stiffness matrices that correspond to all different discretizations have to be provided. This canbe achieved by storing the element matrices on each refinement level and to iterate over exactlythose elements that are required for a given single space discretization. As for the sparse tensorproduct space, passive basis functions are required to store the intermediate stages of the matrix-vector multiplication. As all O(lS) sphere-parents and all O(lD) space-parents of a product basisfunction on levels (lD, lS) have to be included in the space and as each single space basis functionof level l overlaps with at most O(l) coarser basis functions, the number of basis functions to beadded is proportional to the number of degrees of freedom in the adaptive sparse tensor productspace.
6.2 Preconditioning
In order to be able to compute the intensity at computational costs that are proportional tothe number of degrees of freedom in the discretization NL, the number of iteration steps in theCG-solver must be independent of the refinement level. Without preconditioning, numericalexperiments show that the number of iteration steps to solve the linear system grows rapidlywhen the discretization is refined (section 7.3). Therefore, an efficient preconditioner is crucialin order to obtain the desired complexity of the solver.
A preconditioner for a linear system
Ax = b (6.9)
is an invertible linear operator M that is used to transform (6.9) into an equivalent linear system
MAx = Mb.
For a preconditioner to be efficient it has to satisfy two criteria:

92 6.2. PRECONDITIONING
1. For any vector y the matrix-vector multiplication My has to be easy to compute, optimallyat computational costs proportional to the dimension of y.
2. The matrix MA should be close to the identity matrix in the sense that the conditionnumber of MA is independent of the refinement level and close to 1 as this guarantees, ifthe matrix M is additionally symmetric positive definite, the number of CG-iterations tobe small and bounded by a constant that is independent of the refinement level.
In practice, however, a preconditioner where the number of iterations grows very slowly whenthe refinement level is increased is already very satisfactory. Numerical experiments in section7.3 show that using the multiplicative subspace preconditioner described in section 6.2.1 is asuccessful strategy for the linear system that arises from the sparse tensor product Galerkindiscretization of (2.9).
6.2.1 Multiplicative Subspace Preconditioner for the Sparse Tensor Product
Space
As for sparse grids preconditioners for elliptic problems (e.g. [1] or [18, Chap. 7]), the sparsetensor product space is divided into (L+1) overlapping ’full’ subspaces (see Fig. 6.1).
V L0 =
L⋃
lD=0
V lD,L−lD0 ,
where
V lD,L−lD0 :=
⊕
0≤l′D≤lD
0≤l′S≤L−lD
⊕
i′D∈I(l′
D)
i′S∈J(l′S)
Spanβl′D
,l′S
i′D
,i′Sϕ
l′D
i′D⊗ ψl′
S
i′S
is the subspace of refinement level up to L − lD in solid angle and refinement level up to lDin physical space. However, as the RTE is not an elliptic, but a transport problem, someadaptations of the preconditioner are required.
The preconditioner is based on the following idea: If we discretized the RTE on any of thesesubspaces V lD,lS
0 , lD + lS = L, with standard finite elements, which means continuous, piecewiselinear hat functions of level lD in physical space and discontinuous, piecewise constant functionson the spherical triangles of level lS in solid angle, we would obtain O(4lS ) transport equations,each corresponding to the direction of one spherical triangle. If a one-point quadrature rulewas used for integrating over the solid angle, this discretization would be identical to a discreteordinates method with O(4lS ) discrete ordinates, combined with a least-squares finite elementdiscretization in physical space with O(4lD) mesh vertices for a two-dimensional domain, leadingto a complexity of O(4lD+lS ) = O(4L).
Thanks to the decoupling in solid angle, the RTE would be a simple transport equationfor each triangle which could be solved separately for each spherical triangle using an algebraicmultigrid solver (AMG) [35]. As the relative complexity of the AMG algorithms is nearlyindependent of the number of degrees of freedom in the discretization, the computational costsfor solving the RTE on such a subsystem with standard discretizations is nearly proportional tothe number of degrees of freedom in the subspace.
When restricting the sparse tensor product discretization to one of these subspaces V lD,lS0 ,
the solution in V lD ,lS0 is a good approximation for the solution of the sparse tensor product
discretization, restricted to this subspace. This property can be used to subsequently solve alinear system on each of the subspaces and obtain a multiplicative subspace correction precon-ditioner M for the linear system from the sparse tensor product discretization that iteratively

CHAPTER 6. SOLVER 93
lS
lD
V0,30
V1,20
V2,10
V3,00
Figure 6.1: The subspace V lD,L−lD0 contains all degrees of freedom up to level lD in physical
space and up to level L− lD in solid angle. The figure shows the subspaces V lD ,L−lD0 for L = 3
and lD = 0, 1, 2, 3.
computes corrections on the subspaces V lD ,L−lD0 , lD = 0, ..., L, and adds them to the current
approximation (Algorithms 6, 7).
In the sparse tensor product discretization the subspaces V lD ,L−lD0 are discretized with hi-
erarchical bases instead of standard bases as required for the AMG-solver. Therefore, afterrestricting the residual r = b − Ax to the subspace V lD ,L−lD
0 , it has to be transformed intostandard bases with respect to space as well as solid angle. After solving the linear subsystemwith respect to the standard bases, the correction has to be transformed back into hierarchicalrepresentation. Let rlD ,lS denote the restriction of the residual r to the subspace V lD ,lS
0 withlD + lS = L, which can be represented by a matrix, where the rows correspond to degrees offreedom in physical space and columns to degrees of freedom in solid angle. The linear system
9∑
i=1
∑
0≤l′D≤lD
0≤l′S≤lS
∑
i′D∈I(l′
D)
i′S∈J(l′S)
(Bm)l′′D,l′Di′′D
,i′D
(Cm)l′′S ,l′Si′′S,i′
Scl′D,l′Si′D
,i′S
= rl′′D,l′′Si′′D
,i′′S,
with 0 ≤ l′D ≤ lD, 0 ≤ l′S ≤ lS , i′D ∈ I(l′D), i′S ∈ J(l′S), can then be expressed in matrix form
9∑
m=1
BlDm clD ,lS
(ClS
m
)⊤= rlD ,lS ,
with BlDm and ClS
m being the stiffness matrices with respect to dictionaries up to levels lD andlS , respectively, and clD ,lS the correction coefficients. The linear system is transformed into alinear system with respect to the standard bases using basis transformation matrices RlD and

94 6.2. PRECONDITIONING
Algorithm 6 Subspace Correction Preconditioner x←Myx← 0for lS = 0 to L Loop over levels in solid angle dolD = L− lD Level in physical spacer← y −AxclD ,lS ← Subspace Solve(lD, lS , r) Subspace correction on V lD,lS
0 x← x + clD ,lS
end forfor lD = 0 to L Loop over levels in physical space dolS = L− lD Level in solid angler← y −AxclD ,lS ← Subspace Solve(lD, lS , r) Subspace correction on V lD,lS
0 , algorithm 7x← x + clD ,lS
end forreturn x
Algorithm 7 Subspace Solve clD ,lS ← Subspace Solve(lD, lS , r)
rlD ,lS ← r Restriction of residual to levels (lD, lS)rslD ,lS
← rlD,lS
(S lS)−⊤ Transformation to standard representation in solid angle
for i = 1 to NS Loop over triangles in solid angle do
rsi ←
(RlD
)−1ri Transformation to standard representation in physical space
csi ←
(∑9m=1 BlD
m,s
(ClS
m,s
)i,i
)−1rsi Solving the linear system using AMG
ci ←(RlD
)−⊤cs
i Transformation to hierarchical representation in physical spaceend forclD ,lS ← cs
lD ,lS
(S lS)−1 Transformation to hierarchical representation in solid angle
return clD ,lS

CHAPTER 6. SOLVER 95
S lS from (6.7)
9∑
m=1
BlDm clD ,lS
(ClS
m
)⊤= rlD ,lS
RlD
9∑
m=1
(BlD
m,s
(RlD
)⊤clD ,lSS lS
(ClS
m,s
)⊤)(S lS)⊤
= rlD ,lS
9∑
m=1
B
lDm,s
(RlD
)⊤clD ,lSS
lS
︸ ︷︷ ︸=:cs
lD,lS
(ClS
m,s
)⊤
=
(RlD
)−1rlD ,lS
(S lS)−⊤
︸ ︷︷ ︸r
slD,lS
9∑
m=1
(BlD
m,scslD ,lS
(ClS
m,s
)⊤)= rs
lD ,lS
Here, rslD ,lS
and cslD ,lS
are referred to as the residual and the correction ’vector’ and BlDm,s and
ClSm,s are stiffness matrices of level lD and lS , respectively, all with respect to standard bases.
This transformation requires that the inverse of the operator RlD from the left and the
inverse of(S lS)⊤
from the right are applied to the residual to obtain the residual in standardbases and, after the linear system has been solved in standard bases, analogous transformationshave to be carried out to obtain the correction matrix in hierarchical representation.
As the hierarchical basis functions in solid angle are L2(S2)- orthogonal, the linear operatorSlS satisfies
(S lS)⊤S lS = D ⇒
(S lS)−1
=(S lS)⊤
D,
where D is a diagonal matrix with positive matrix entries. Therefore, the inverse operators(S lS)−1
and(S lS)−⊤
can be applied at computational costs proportional to the number of
degrees of freedom in V lD,lS0 .
In physical space, the operators(RlD
)−1and
(RlD
)−⊤can be applied to the subspace
coefficients by using the standard decomposition strategy [11] for the hierarchical basis at com-
putational costs proportional to the number of degrees of freedom in V lD,lS0 .
As the total sum of the degrees of freedom in the L+1 subspaces V lD,lS0 is bounded by 2NL,
L∑
lD=0
V lD,L−lD0 =
L∑
l=0
Nl ≤ 2NL,
the relative complexity of applying the preconditioner is - under the condition that the numberof AMG iterations is uniformly bounded - independent of the refinement level L. The precondi-tioner therefore satisfies the first criterion.
The second criterion for a good preconditioner- namely that the number of CG-iterationsis substantially reduced compared to the non-preconditioned linear system and (nearly) inde-pendent of the refinement level L is tested numerically in section 7.3. All experiments confirmthat the multiplicative subspace preconditioner presented above is a successful preconditioningstrategy.

96 6.2. PRECONDITIONING

Part III
Numerical Experiments
97


Chapter 7
Sparse Tensor Product
Approximation
In this chapter four numerical examples that illustrate the efficiency of the sparse tensor prod-uct discretization, using the sparse tensor product space specified in Definition 2.8 and theperformance of the subspace correction preconditioner (section 6.2.1) are presented.
All numerical experiments are carried out in two space dimensions with the computationaldomain being a unit circle. The coarsest mesh in physical space has 41 vertices (see 2.1) andvertices in solid angle coincide with those of the octahedron with vertices (0, 0, 1)⊤, (0, 1, 0)⊤,etc.
Due to the reduced dimensionality in physical space the optical thickness for a given direction
s = (cosϕ sinϑ, sinϕ sinϑ, cos ϑ)⊤ ∈ S2
scales asκ
sinϑ. In order to avoid numerical inaccuracies that purely arise from the rapid change
with respect to solid angle of optical thickness for small absorption coefficients, we restrictourselves to κ ≥ 0.5. (Other numerical experiments not presented here show that κ can bereduced without loss of accuracy if solid angles close to the z-axis are avoided (which means torestrict the solid angle domain to directions with sinϑ ≤ C < 1).
In section 7.1, the four test problems are described by specifying the absorption coefficientκ(x) and the blackbody intensity Ib(x). Section 7.2 contains profiles of incident radiation andnet emission for different discretization levels that show the convergence behavior of the dis-cretization with respect to the refinement level L, while in section 7.3 the convergence of theCG-method with and without preconditioning is presented.
7.1 Test Problems
The motivation for all test problems comes from the goal to simulate an arc in a circuit breaker.Therefore we use test cases where there is a radiating source near the center of the domain. Forall test problems, we consider a two-dimensional circular domain D of radius r = 1 with fullyabsorbing cold walls.
7.1.1 Test Problem 1
In the first test case we consider a smooth radiating source located at the center of the domain
Ib(x) = e−4|x|2
with absorption coefficient equal to 1. The heat flux of the resulting solution is shown in Fig.7.1.
99

100 7.1. TEST PROBLEMS
7.1.2 Test Problem 2
In the second setting, we consider a family of test cases where there is a smooth radiating sourcelocated around x0 = (0.04, 0.05)⊤
Ib(x) =
1, |x− x0| ≤ 0.2
e−20|x−x0|2, otherwise
and the absorption coefficient κ(x) = 0.5, 1, 2, 10 or 2 + Ib(x). The heat flux of the resultingsolutions are shown in Figs. 7.2 to 7.6.
−1 −0.5 0 0.5 1
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
x−coordinate
y−co
ordi
nate
Figure 7.1: Heat flux q(x) of the rotationallysymmetric test example 1.
−1 −0.5 0 0.5 1
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
x−coordinate
y−co
ordi
nate
Figure 7.2: Heat flux q(x) of test example 2with κ = 0.5.
−1 −0.5 0 0.5 1
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
x−coordinate
y−co
ordi
nate
Figure 7.3: Heat flux q(x) of test example 2with κ = 1.
−1 −0.5 0 0.5 1
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
x−coordinate
y−co
ordi
nate
Figure 7.4: Heat flux q(x) of test example 2with κ = 2.
7.1.3 Test Problem 3
In the third test problem, the blackbody radiation is not smooth in the center of the sourceat x0 = (0.04, 0.05)⊤ and decays much more slowly than in test example 2 and the absorptioncoefficient is equal to 0.5 everywhere in the domain.
Ib(x) =
(1− |x− x0|/0.6), |x− x0| < 0.60, otherwise
The heat flux of the solution is given in Fig 7.7.

CHAPTER 7. SPARSE TENSOR PRODUCT APPROXIMATION 101
−1 −0.5 0 0.5 1
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
x−coordinate
y−co
ordi
nate
Figure 7.5: Heat flux q(x) of test example 2with κ = 10.
−1 −0.5 0 0.5 1
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
x−coordinate
y−co
ordi
nate
Figure 7.6: Heat flux q(x) of test example 2with κ = 2 + Ib(x).
7.1.4 Test Problem 4
In the last test problem, there are three radiating sources located at x0 = (0.25, 0.05)⊤ , x1 =(−0.05,−0.25)⊤ and x2 = (−0.2, 0.2)⊤ :
Ib(x) = 10(e−20|x−x0|2 + e−20|x−x1|2 + e−20|x−x2|2
)
The absorption is anisotropic with κ(x) = 0.5 + Ib(x). The heat flux of the solution is given inFig. 7.8.
−1 −0.5 0 0.5 1
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
x−coordinate
y−co
ordi
nate
Figure 7.7: Heat flux q(x) of test example3.
−1 −0.5 0 0.5 1
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
x−coordinate
y−co
ordi
nate
Figure 7.8: Heat flux q(x) of test example4.
The heat flux of the solution is given in Fig. 7.8.
7.2 Efficiency of the Discretization
7.2.1 Number of Degrees of Freedom
The sparse tensor product discretization allows to drastically reduce the number of degrees offreedom compared to the full approximation. The number of degrees of freedom used in thenumerical experiments are given in table 7.1.

102 7.2. EFFICIENCY OF THE DISCRETIZATION
level ND ×NS Active Degrees of Freedom All Degrees of Freedom
0 328 224 328
1 4 640 1 664 2 496
2 69 760 9 824 13 976
3 1 081 856 51 872 68 880
4 17 041 408 257 600 324 440
Table 7.1: The number of degrees of freedom in the full tensor product space, the sparse tensorproduct space and the extended sparse tensor product space.
7.2.2 Incident Radiation and Net Emission
In order to assess the accuracy and efficiency (accuracy compared to the number of degrees offreedom) of the sparse tensor product approximation, we consider the convergence of the sparsetensor product approximation towards a reference solution.
The net emission enters the energy equation and is therefore an important quantity thatis derived from the radiation intensity. As the computation is based on the incident radiationG(x) via
∇ · q(x) = κ (4πIb(x)−G(x)) (7.1)
we mainly focus on the accuracy of the incident radiation. However, as the difference between theemission and the incident radiation is multiplied by the absorption coefficient, higher accuracyof G(x) is required where κ(x) is large in order to obtain the same accuracy in the net emission.
In order to compare the results for different refinement levels, profiles of incident radiationand net emission along the x-axis in the domain D are presented. Furthermore, the sparsetensor product approximation is compared with a standard finite element discretization with acoarse solid angle discretization, as such approximations are very popular in radiative transfersimulations.
For any fixed position in physical space, the reference solution of the incident radiation iscomputed by dividing the sphere into 1280 spherical triangles and approximating the integralwith a One-Point-Quadrature rule. The radiation intensity is determined for the directions thatcorrespond to the centers of gravity of the spherical triangles, applying a MATLAB ODE-solverfor the line integrals. The net emission is then computed from the incident radiation usingequation 7.1. All numerical solutions have been computed using the (preconditioned) CG-solverto the accuracy that the relative error of the residual in the energy norm is smaller or equal to10−10. Figs. 7.9 and 7.10 show incident radiation and net emission for test example 1. The sparsetensor product approximation converges nicely to the reference solution when the maximumrefinement level L is increased. As expected, the maximum errors in incident radiation and netemission occur in the center of the domain, where the incident radiation is large due to thediffusive character of a coarse least-squares discretization, and at the boundary due to the non-smoothness of the solution and the poor approximation properties of the sparse tensor productspace at the boundary. Comparing the sparse tensor product approximation with a discreteordinates discretization, where a coarse discretization in solid angle (32 spherical triangles)combined with the finest mesh resolution in physical space is used, it becomes obvious that thesparse tensor product approximation is clearly superior to the discrete ordinates discretization.Even though the discrete ordinates methods uses more degrees of freedom than the sparse tensorproduct method on level L = 4, the solution is only marginally more accurate than the sparsetensor product solution of level L = 1 with the same resolution.
Fig. 7.11 shows the convergence of the incident radiation with respect to the L2(D)− andthe H1(D)− norms for the sparse tensor product spaces on levels 0 to 4.

CHAPTER 7. SPARSE TENSOR PRODUCT APPROXIMATION 103
0 0.2 0.4 0.6 0.8 10
1
2
3
4
5
6
x−coordinate
Inci
dent
rad
iatio
n G
(x)
L0 (224)L1 (1664)L2 (9824)L3 (51904)L4 (257964)DOM (260608)Ref. Sol.
Figure 7.9: Profile of the incident radiation oftest problem 1 for the sparse tensor productdiscretization on levels 0 to 4 (L0 to L4), thefull approximation with with 32 spherical tri-angles (DOM) and the reference solution (Ref.Sol.) using line integration and quadrature insolid angle. The numbers in brackets refer tothe number of degrees of freedom in the dis-cretization.
0 0.2 0.4 0.6 0.8 1−2
0
2
4
6
8
10
x−coordinate
Net
em
issi
on d
iv q
(x)
L0 (224)L1 (1664)L2 (9824)L3 (51904)L4 (257964)DOM (260608)Ref. Sol.
Figure 7.10: Profile of the net emission of testproblem 1. This quantity enters the energyequation of a simulation and is therefore of ma-jor importance. The comparison of the sparsetensor product approximation on different lev-els with a full approximation with coarse sphererefinement (yellow) shows that the sparse ten-sor product approximation is clearly more effi-cient than the discrete ordinates method.
102
103
104
105
106
10−2
10−1
100
101
number of degrees of freedom
inci
dent
rad
iatio
n er
ror
||G||
H1(D)
||G||L
2(D)
Figure 7.11: Convergence of the incident radiation with respect to the L2(D)− and theH1(D)−norms on level 0 to 4 for test example 1.

104 7.2. EFFICIENCY OF THE DISCRETIZATION
The family of test examples of type 2 (Figs. 7.12 to 7.23) show the approximation propertiesof the sparse tensor product discretization for a blackbody radiation intensity that is typicalfor an arc in a circuit breaker. In order to study the influence of the absorption coefficient, thesame blackbody radiation is used with different absorption coefficients, including one that isanisotropic. The series of test problems shows that for problems with small absorption a higherrefinement level is required to obtain an accurate solution. However, the larger the absorptioncoefficient is chosen, the more accuracy is required for the incident radiation to obtain an accuratesolution for the net emission (Figs. 7.18, 7.19 and Figs. 7.26, 7.27). For a test problems of type2, the full approximation (DOM in yellow) is clearly less accurate than the sparse tensor productapproximation of level 4 (L4 in blue).
−1 −0.5 0 0.5 10
0.5
1
1.5
2
2.5
3
3.5
x−coordinate
Inci
dent
rad
iatio
n G
(x)
L0L1L2L3L4DOMRef. Sol.
Figure 7.12: Profile of the incident radiation oftest problem 2 with κ = 0.5.
−1 −0.5 0 0.5 1−1
0
1
2
3
4
5
6
x−coordinate
Net
em
issi
on d
iv q
(x)
L0L1L2L3L4DOMRef. Sol.
Figure 7.13: Profile of the net emission of testproblem 2 with κ = 0.5.
−1 −0.5 0 0.5 10
1
2
3
4
5
6
x−coordinate
Inci
dent
rad
iatio
n G
(x)
L0L1L2L3L4DOMRef. Sol.
Figure 7.14: Profile of the incident radiation oftest problem 2 with κ = 1.
−1 −0.5 0 0.5 1−2
0
2
4
6
8
10
x−coordinate
Net
em
issi
on d
iv q
(x)
L0L1L2L3L4DOMRef. Sol.
Figure 7.15: Profile of the net emission of testproblem 2 with κ = 1.
In test example 3 (Figs. 7.24 and 7.24) the approximation properties for a hat-shapedblackbody intensity, combined with a small absorption coefficient, is tested. In contrast to testexample 2 with the same absorption coefficient, where the largest approximation error on level4 in the incident radiation was located around in a circle of about 0.2 around the radiatingsource (Fig. 7.12), the largest approximation error for test example 3 is located at the center ofradiation source. This behavior agrees with the theory as the approximation properties dependon the smoothness of the solution which itself depends on the smoothness of the blackbody

CHAPTER 7. SPARSE TENSOR PRODUCT APPROXIMATION 105
−1 −0.5 0 0.5 10
1
2
3
4
5
6
7
8
9
x−coordinate
Inci
dent
rad
iatio
n G
(x)
L0L1L2L3L4DOMRef. Sol.
Figure 7.16: Profile of the incident radiation oftest problem 2 with κ = 2.
−1 −0.5 0 0.5 1−4
−2
0
2
4
6
8
10
12
14
x−coordinate
Net
em
issi
on d
iv q
(x)
L0L1L2L3L4DOMRef. Sol.
Figure 7.17: Profile of the net emission of testproblem 2 with κ = 2.
−1 −0.5 0 0.5 10
2
4
6
8
10
12
14
x−coordinate
Inci
dent
rad
iatio
n G
(x)
L0L1L2L3L4DOMref sol
Figure 7.18: Profile of the incident radiation oftest problem 2 with κ = 10.
−1 −0.5 0 0.5 1−15
−10
−5
0
5
10
15
x−coordinate
Net
em
issi
on d
iv q
(x)
L0L1L2L3L4DOMref sol
Figure 7.19: Profile of the net emission of testproblem 2 with κ = 10.
−0.4 −0.3 −0.2 −0.1 0
6
7
8
9
10
11
12
x−coordinate
Net
em
issi
on d
iv q
(x)
L0L1L2L3L4DOMref sol
Figure 7.20: Enlarged section of the net emis-sion profile of Fig. 7.19 around the left peak.
−0.1 0 0.1 0.2 0.3
−1
0
1
2
3
4
5
x−coordinate
Net
em
issi
on d
iv q
(x)
L0L1L2L3L4DOMref sol
Figure 7.21: Enlarged section of the net emis-sion profile of Fig. 7.19 around the center.

106 7.2. EFFICIENCY OF THE DISCRETIZATION
−1 −0.5 0 0.5 10
1
2
3
4
5
6
7
8
9
10
x−coordinate
Inci
dent
rad
iatio
n G
(x)
L0L1L2L3L4DOMref sol
Figure 7.22: Profile of the incident radiation oftest problem 2 with κ(x) = 2 + Ib(x).
−1 −0.5 0 0.5 1−20
−10
0
10
20
30
40
50
60
x−coordinate
Net
em
issi
on d
iv q
(x)
L0L1L2L3L4DOMref sol
Figure 7.23: Profile of the net emission of testproblem 2 with κ(x) = 2 + Ib(x).
radiation.
−1 −0.5 0 0.5 10
0.5
1
1.5
2
2.5
x−coordinate
Inci
dent
rad
iatio
n G
(x)
L0L1L2L3L4DOMRef. Sol.
Figure 7.24: Profile of the incident radiation oftest problem 3.
−1 −0.5 0 0.5 1−1
0
1
2
3
4
5
6
x−coordinate
Net
em
issi
on d
iv q
(x)
L0L1L2L3L4DOMRef. Sol.
Figure 7.25: Profile of the net emission of testproblem 3.
Test example 4 shows the approximation properties of the sparse tensor product discretiza-tion for a problem with several radiating sources and a highly anisotropic absorption coefficient.The results are similar to the ones in the previous examples.

CHAPTER 7. SPARSE TENSOR PRODUCT APPROXIMATION 107
−1 −0.5 0 0.5 10
20
40
60
80
100
120
x−coordinate
Inci
dent
rad
iatio
n G
(x)
L0L1L2L3L4DOMRef. Sol.
Figure 7.26: Profile of the incident radiation oftest problem 4.
−1 −0.5 0 0.5 1−100
−50
0
50
100
150
200
250
300
x−coordinate
Net
em
issi
on d
iv q
(x)
L0L1L2L3L4DOMRef. Sol.
Figure 7.27: Profile of the net emission of testproblem 4.
7.3 Multiplicative Subspace Preconditioner
The linear system of equations that arises from the sparse tensor product discretization is solvedwith the CG-method as described in chapter 6. The number of iteration steps with and withoutpreconditioning for test problems 1 to 4 with the stopping criterion ‖b −Ax‖A ≤ 10−10‖b‖Aare displayed in Figs. 7.28 to 7.43. The plots on the left hand side contain all convergencehistories of level 1 to 4 with and without preconditioning where the ones on the right hand sideprovide more details of the convergence of the preconditioned CG-method. Although the numberof iteration steps with preconditioning slowly grows when the refinement level is increased thegrowth is clearly sub-linear, which makes the preconditioned method substantially more efficientthan the non-preconditioned CG-method.
When solving the linear system for test problem 1 (Figs. 7.28 and 7.29) without precondi-tioning, the number of iterations increases rapidly when the refinement level is increased - itnearly doubles with each refinement. Applying the multiplicative subspace preconditioner de-scribed in section 6.2 drastically reduces the growth of the number of iterations when the spaceis refined. The increase of iteration steps in Fig. 7.29 is clearly sub-linear with respect to thenumber of levels and the total number of iterations is very small. The convergence rate of thepreconditioned method on level 4 is not constant, but stagnates for one to two steps after threeand thirteen steps. The reason for this is so far unknown. For applications the preasympotics(up to step 3 before the first stagnation) are of great interest as the approximate solution willalready be accurate enough and of the order of the discretization error on moderate refinementlevels for many problems in practice. The number of steps at these early stages of the iterationdoes not increase when the refinement level is increased. For many practical applications it willtherefore be sufficient to perform three to four CG-iteration steps.
The convergence histories for test example 2 in Figs. 7.30 to 7.39 show the sensitivityof the CG-method towards the absorption coefficient. Without preconditioning, for constantabsorption coefficients, the number of CG-steps for the same level decreases when the absorptioncoefficient is increased. The largest numbers of iteration steps for example 2 are observed whenthe absorption coefficient is not constant (Fig. 7.38). The results for the preconditioned methodare nearly independent of the absorption coefficient. The number of iterations in particular onlevel 4 mainly depend on the stagnation points in the convergence history. The convergenceplots of test example 2 confirm the results for test example 1 concerning the moderate increaseof iteration step for the preconditioned system, the phenomenon of stagnation points and thefast preasymptotic convergence during the first three to four iteration steps.

108 7.3. MULTIPLICATIVE SUBSPACE PRECONDITIONER
0 50 100 150 200 250 300 350 400
10−10
10−8
10−6
10−4
10−2
100
number of CG−iterations
||r|| A
/||f|
| A
PCG L1PCG L2PCG L3PCG L4CG L1CG L2CG L3CG L4
Figure 7.28: Convergence of CG-method withand without preconditioning for example 1.
0 2 4 6 8 10 12 14 1610
−12
10−10
10−8
10−6
10−4
10−2
100
number of CG−iterations
||r|| A
/||f|
| A
L1L2L3L4
Figure 7.29: Convergence of preconditionedCG-method for example 1.
0 50 100 150 200 250 300 350 400
10−10
10−8
10−6
10−4
10−2
100
number of CG−iterations
||r|| A
/||f|
| A
PCG L1PCG L2PCG L3PCG L4CG L1CG L2CG L3CG L4
Figure 7.30: Convergence of CG-method withand without preconditioning for example 2with κ = 0.5.
0 2 4 6 8 10 12 14 1610
−12
10−10
10−8
10−6
10−4
10−2
100
number of CG−iterations
||r|| A
/||f|
| A
L1L2L3L4
Figure 7.31: Convergence of preconditionedCG-method for example 2 with κ =0.5.
0 50 100 150 200 250 300 350 400
10−10
10−8
10−6
10−4
10−2
100
number of CG−iterations
||r|| A
/||f|
| A
PCG L1PCG L2PCG L3PCG L4CG L1CG L2CG L3CG L4
Figure 7.32: Convergence of CG-method withand without preconditioning for example 2with κ = 1.
0 2 4 6 8 10 12 14 1610
−12
10−10
10−8
10−6
10−4
10−2
100
number of CG−iterations
||r|| A
/||f|
| A
L1L2L3L4
Figure 7.33: Convergence of preconditionedCG-method for example 2 with κ =1.

CHAPTER 7. SPARSE TENSOR PRODUCT APPROXIMATION 109
0 50 100 150 200 250 300 350 400
10−10
10−8
10−6
10−4
10−2
100
number of CG−iterations
||r|| A
/||f|
| A
PCG L1PCG L2PCG L3PCG L4CG L1CG L2CG L3CG L4
Figure 7.34: Convergence of CG-method withand without preconditioning for example 2with κ = 2.
0 2 4 6 8 10 12 14 1610
−12
10−10
10−8
10−6
10−4
10−2
100
number of CG−iterations
||r|| A
/||f|
| A
L1L2L3L4
Figure 7.35: Convergence of preconditionedCG-method for example 2 with κ =2.
0 50 100 150 200 250 300 350 400
10−10
10−8
10−6
10−4
10−2
100
number of CG−iterations
||r|| A
/||f|
| A
PCG L1PCG L2PCG L3PCG L4CG L1CG L2CG L3CG L4
Figure 7.36: Convergence of CG-method withand without preconditioning for example 2with κ = 10.
0 2 4 6 8 10 12 14 1610
−12
10−10
10−8
10−6
10−4
10−2
100
number of CG−iterations
||r|| A
/||f|
| A
L1L2L3L4
Figure 7.37: Convergence of preconditionedCG-method for example 2 with κ =10.
0 50 100 150 200 250 300 350 400
10−10
10−8
10−6
10−4
10−2
100
number of CG−iterations
||r|| A
/||f|
| A
PCG L1PCG L2PCG L3PCG L4CG L1CG L2CG L3CG L4
Figure 7.38: Convergence of CG-method withand without preconditioning for example 2with κ = 2 + Ib(x).
0 2 4 6 8 10 12 14 1610
−12
10−10
10−8
10−6
10−4
10−2
100
number of CG−iterations
||r|| A
/||f|
| A
L1L2L3L4
Figure 7.39: Convergence of preconditionedCG-method for example 2 with κ = 2 +Ib(x).

110 7.3. MULTIPLICATIVE SUBSPACE PRECONDITIONER
The convergence plots for test example 3 (Figs. 7.40 and 7.41) are very similar to the onesof test example 2 with the same absorption coefficient κ = 0.5 (Figs. 7.30 and 7.31). Asexpected, the blackbody intensity does not influence the convergence rate as it only appears inthe right-hand-side.
0 50 100 150 200 250 300 350 400
10−10
10−8
10−6
10−4
10−2
100
number of CG−iterations
||r|| A
/||f|
| A
PCG L1PCG L2PCG L3PCG L4CG L1CG L2CG L3CG L4
Figure 7.40: Convergence of CG-method withand without preconditioning for example 3.
0 2 4 6 8 10 12 14 1610
−12
10−10
10−8
10−6
10−4
10−2
100
number of CG−iterations
||r|| A
/||f|
| A
L1L2L3L4
Figure 7.41: Convergence of preconditionedCG-method for example 3.
The strongly anisotropic absorption coefficient in test example 4 leads to a very slow conver-gence of the CG-method without preconditioning (Fig. 7.42). Although these convergence ratesare substantially worse than the corresponding ones of test example 2 with absorption coefficient2+ Ib(x), the preconditioned CG-method shows very similar convergence behavior for both testexamples. This last example shows very clearly how efficient the multiplicative preconditionercan be: instead of several hundred iterations the linear system can be solved with sufficientlyhigh accuracy with a small and nearly level-independent number of iteration steps.
0 50 100 150 200 250 300 350 400
10−10
10−8
10−6
10−4
10−2
100
number of CG−iterations
||r|| A
/||f|
| A
PCG L1
PCG L2
PCG L3
PCG L4
CG L1
CG L2
CG L3
CG L4
Figure 7.42: Convergence of CG-method withand without preconditioning for example 4.
0 2 4 6 8 10 12 14 1610
−12
10−10
10−8
10−6
10−4
10−2
100
number of CG−iterations
||r|| A
/||f|
| A
L1L2L3L4
Figure 7.43: Convergence of preconditionedCG-method for example 4.

Chapter 8
Adaptive Approximation
In this chapter we present test cases that illustrate the efficiency of the adaptive sparse tensorproduct space. The examples are inspired by circuit breaker physics, where strongly absorbingmedia is combined with large temperature gradients, leading to discontinuities in absorption orblackbody emission. After describing the test problems in section 8.1, the resulting adaptivemeshes in physical space are presented in section 8.2 and profiles of the net emission, includingthe required number of degrees of freedom, in section 8.3.
8.1 Test Problems
8.1.1 Test Problem 1
In the first test problem, a circular radiating source of radius 0.2 is located at x0 = ( 13π ,
13π + 1
20 )⊤
with the discontinuous blackbody intensity function
Ib(x) =
10, |x− x0| ≤ 0.20, otherwise
in strongly absorbing media with κ(x) = 10. The adaptive space refinement is tested for thefour thresholding parameters ν = 0.5, 1.0, 1.5 and 2.0.
8.1.2 Test Problem 2
In the second test problem, the absorption is discontinuous along the straight line x = −0.08
κ(x, y) =
5, x ≤ −0.083, otherwise.
The smooth circular source is centered at x0 = (−0.08,−0.02)⊤ and given by
Ib(x) =
e−20|x−x0|2 − e−5, |x− x0| ≤ 0.50, otherwise.
The adaptive space refinement is tested for the four thresholding parameters ν = 0.02, 0.03, 0.04and 0.05.
111

112 8.2. ADAPTIVELY REFINED MESHES IN PHYSICAL SPACE
8.2 Adaptively Refined Meshes in Physical Space
In order to give an impression of the ν-dependence of the adaptive algorithm with respect tophysical space, we plot the resulting adaptively refined meshes for the different values of ν.
Figs. 8.1 to 8.4 show the adaptively created meshes for test example 1. As expected, the meshrefinement is concentrated around the discontinuity of the radiating source with the number ofelements on the finest level decreasing when the thresholding parameter ν is increased. Thevery localized mesh refinement reflects the radiation intensity which has large gradients at thediscontinuity and is very small away from the source due to the large absorption coefficient.
Figure 8.1: Adaptive mesh in physical spacefor test example 1 that is created when build-ing up the adaptive sparse tensor productspace with threshold ν = 0.05. (24145 de-grees of freedom). The location of the radiat-ing source is marked with a circle.
Figure 8.2: Adaptive mesh in physical spacefor test example 1 that is created when build-ing up the adaptive sparse tensor productspace with threshold ν = 1.0 (13889 degrees offreedom). The location of the radiating sourceis marked with a circle.
Figure 8.3: Adaptive mesh in physical spacefor test example 1 that is created when build-ing up the adaptive sparse tensor productspace with threshold ν = 1.5 (10152 degrees offreedom). The location of the radiating sourceis marked with a circle.
Figure 8.4: Adaptive mesh in physical spacefor test example 1 that is created when build-ing up the adaptive sparse tensor productspace with threshold ν = 2.0 (7083 degrees offreedom). The location of the radiating sourceis marked with a circle.

CHAPTER 8. ADAPTIVE APPROXIMATION 113
The meshes of test example 2 are given in Figs. 8.5 to 8.8. The mesh is refined around theradiating source at x0 = (−0.08,−0.02)⊤ and along the line x = −0.08. When increasing thethresholding parameter ν the refinement is more concentrated to the left of the discontinuity asthe gradient of the intensity with respect to physical space is larger in that part.
Figure 8.5: Adaptive mesh in physical for testexample 2 space that is created when buildingup the adaptive sparse tensor product spacewith threshold ν = 0.02 (28377 degrees offreedom). The discontinuity of the absorptioncoefficient is marked with a straight line atx = −0.08.
Figure 8.6: Adaptive mesh in physical spacefor test example 2 that is created when build-ing up the adaptive sparse tensor productspace with threshold ν = 0.03 (17842 degreesof freedom). The discontinuity of the absorp-tion coefficient is marked with a straight lineat x = −0.08.
Figure 8.7: Adaptive mesh in physical spacefor test example 2 that is created when build-ing up the adaptive sparse tensor productspace with threshold ν = 0.04. (12632 degreesof freedom). The discontinuity of the absorp-tion coefficient is marked with a straight lineat x = −0.08.
Figure 8.8: Adaptive mesh in physical spacefor test example 2 that is created when build-ing up the adaptive sparse tensor productspace with threshold ν = 0.05. (9593 degreesof freedom). The discontinuity of the absorp-tion coefficient is marked with a straight lineat x = −0.08.

114 8.3. EFFICIENCY OF THE ADAPTIVE REFINEMENT
8.3 Efficiency of the Adaptive Refinement
The main quantity of interest of radiative transfer is the net emission as it enters the energyequation. When discontinuities in either the absorption coefficient or the blackbody intensityare present, the resulting net emission can change rapidly across the discontinuity with largeabsolute values as it is the case for both test examples. In order to assess the accuracy, the sparsetensor product discretizations on levels 2 to 4 are compared with the adaptive discretizationsfor four different thresholding values ν.
For test example 1, the profile of the net emission along the line x = y around the dis-continuity at x ≈ 0.25 is plotted. Fig. 8.9 shows that all four adaptive solutions resolve thediscontinuity almost as accurately as the sparse tensor product solution on level 4 and are clearlysuperior to the sparse tensor product solutions on levels 2 and 3. In particular, with the adaptivediscretization with 7083 degrees of freedom, the discontinuity is resolved almost as accuratelyas with the sparse tensor product approximation of level 4 with only a fraction of the degreesof freedom.
Zooming in at x = 0.25 (Fig. 8.10) and x = 0.28, where the absolute value of the net emissionwith the sparse tensor product discretization of level 4 reaches a local maximum, differencesbetween the adaptive approximations become visible. The adaptive solution with 24145 degreesof freedom almost coincides with the sparse tensor product approximation on level L, while theaccuracy decreases with increasing thresholding parameter as expected.
For test example 2, the profile of the net emission along the x-axis is plotted. Fig. 8.12 showsthat, in contrast to the sparse tensor product approximations on levels 2 and 3, all adaptivediscretizations are able to capture the discontinuity, even the very coarse adaptive solution withonly 9593 degrees of freedom. Figs. 8.13 and 8.14 show that, as expected, the accuracy of theadaptive solutions decreases with increasing thresholding parameter ν.
Overall, although the adaptive sparse tensor product algorithm based on coefficient thresh-olding is only a heuristic space refinement strategy, it provides satisfactory numerical results forproblems with strongly absorbing media and discontinuities in either the absorption coefficientor the blackbody intensity. For these cases the adaptive sparse tensor product approximation isan efficient discretization to substantially reduce the number of degrees of freedom to a fractionof the degrees of freedom in a sparse tensor product approximation with comparable accuracy.

CHAPTER 8. ADAPTIVE APPROXIMATION 115
0.1 0.15 0.2 0.25 0.3 0.35 0.4−600
−400
−200
0
200
400
600
x−coordinate
Net
Em
issi
on d
iv q
(x,x
)
L2 (9824)
L3 (51904)
L4 (257964)
Adapt. ν=0.5 (24145)
Adapt. ν=1.0 (13889)
Adapt. ν=1.5 (10152)
Adapt. ν =2.0 (7083)
Figure 8.9: Net emission profile along the line x = y for test example 1, comparing the accuracyof the sparse tensor product approximation on levels 2 to 4 and four adaptive approximationswith different thresholding parameter ν. The numbers in brackets refer to the number of degreesof freedom in the discretization.
0.22 0.23 0.24 0.25 0.26 0.27 0.28
300
350
400
450
500
550
x−coordinate
Net
Em
issi
on d
iv q
(x,x
)
L2 (9824)
L3 (51904)
L4 (257964)
Adapt. ν=0.5 (24145)
Adapt. ν=1.0 (13889)
Adapt. ν=1.5 (10152)
Adapt. ν =2.0 (7083)
Figure 8.10: Net emission profile along the line x = y of test example 1 around x = 0.25.

116 8.3. EFFICIENCY OF THE ADAPTIVE REFINEMENT
0.24 0.26 0.28 0.3 0.32 0.34 0.36 0.38
−400
−300
−200
−100
0
100
x−coordinate
Net
Em
issi
on d
iv q
(x,x
)
L2 (9824)
L3 (51904)
L4 (257964)
Adapt. ν=0.5 (24145)
Adapt. ν=1.0 (13889)
Adapt. ν=1.5 (10152)
Adapt. ν =2.0 (7083)
Figure 8.11: Net emission profile along the line x = y of test example 1 around x = 0.31.
−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3−10
0
10
20
30
40
50
60
x−coordinate
Net
Em
issi
on d
iv q
(x)
L2 (9824)
L3 (51904)
L4 (257964)
Adapt. ν = 0.02 (28377)
Adapt. ν = 0.03 (17842)
Adapt. ν = 0.04 (12632)
Adapt. ν = 0.05 (9593)
Figure 8.12: Net emission profile along the x-axis for test example 2, comparing the accuracy ofthe sparse tensor product approximation on levels 2 to 4 and four adaptive approximations withdifferent thresholding parameter ν. The numbers in brackets refer to the number of degrees offreedom in the discretization.

CHAPTER 8. ADAPTIVE APPROXIMATION 117
−0.18 −0.16 −0.14 −0.12 −0.1 −0.08 −0.06 −0.04 −0.02 0
42
44
46
48
50
52
54
56
58
x−coordinate
Net
Em
issi
on d
iv q
(x)
L2 (9824)
L3 (51904)
L4 (257964)
Adapt. ν = 0.02 (28377)
Adapt. ν = 0.03 (17842)
Adapt. ν = 0.04 (12632)
Adapt. ν = 0.05 (9593)
Figure 8.13: Net emission profile along the x-axis of test example 2 around x ≈-0.1.
−0.1 −0.09 −0.08 −0.07 −0.06 −0.05 −0.04 −0.03 −0.02 −0.01
23
24
25
26
27
28
29
30
31
x−coordinate
Net
Em
issi
on d
iv q
(x)
L2 (9824)
L3 (51904)
L4 (257964)
Adapt. ν = 0.02 (28377)
Adapt. ν = 0.03 (17842)
Adapt. ν = 0.04 (12632)
Adapt. ν = 0.05 (9593)
Figure 8.14: Net emission profile along the x-axis of test example 2 around x ≈ −0.05.

118 8.3. EFFICIENCY OF THE ADAPTIVE REFINEMENT

List of Symbols
(u, v)L2 , 8
<D, 64
<S, 64
D, 3
DTS, 24
Dγ1, 28
Dγ2, 28
Dγ , 28
El, 33
F , 50
G(x), 5
H1,0(D × S), 11
Hα,β(Ω), 14
I(lD), 21
ITDs
, 54
IQ, 49
Ix, 40
Iχ, 48
Iη, 48
Ib, 3
ITD, 40
ITD
TS, 54
J(lS), 22
J(u), 8
L, 11
ML, 12
N , 6
NL, 12
P1, 5
P lD, 16
Pn, 5
P l0,lDTS
, 30
P lS , 16
P l0,lTS
, 30
Q, 47
S, 4
S(Ω), 37
S1, 7
S1x,ϑi
, 54
S2, 4
S0,0(S,T LS ), 11
S0,0(S,T lS), 24
S1,1(D,T LD ), 11
S1,1(D,T lDD ), 24
Sn, 5T , 3
V L, 12
V L0 , 12V L
lD,iD, 21
V Λ0 , 63
V l0,lDDTS
, 24
V l0,lSTS
, 24
V lSlD,iD
, 21V0, 11
V lD ,L−lD0 , 92
V LD , 11V L
S , 11
V LTS ,0, 18
V lDTS ,0, 18
W lD, 13
W lS, 13
W l0,lDDTS
, 24
W l0,lSTS
, 24
W lSlD,iD
, 21
W lDTS ,0, 20V, 8
V0, 8
Γ+, 10
Γ−(s), 8Γ−, 4
‖‖, 8
‖‖S , 8‖u‖A, 10
Ω, 13
Ωl0, 23Ωl0
γ , 23
Ωγ1, 28
Ωγ2, 28
Ω1γ2
, 53
119

Ω2γ2
, 53
Ωγ , 28Φ(s, s′, ν, ν ′), 4n(x), 4
p, 45q, 5r, 93
s, 3x, 3αi(x), 12αlD
TS ,iD, 21
ϕ, 47βlD ,lS
iD ,iS, 22
βj(s), 12
·p, 85χ, 47ε(x), 8η, 47
γ, 17γ(TS), 17γ(s), 17
γ(x), 17γ(ϑ), 18NL, 63κ, 3
κ0, 8RlD ,l′
D , 88SlS ,l′
S , 88
cslD ,lS
, 95clD ,lS , 93rslD ,lS
, 95rlD ,lS , 93
B, 84Bm, 88BlD
m , 88, 93
Bl1s , 86
Bl′Dm,s, 88BlD
m,s, 95C, 84
Clower, 85Cupper, 85Cm, 88ClS
m , 88, 93
Cl′Sm,s, 88ClS
m,s, 95DD, 20DS , 21
Ku(x, s, ν, t), 3NL, 22NG
L , 23
Rl1,l′1 , 86
Rl1 , 87
RlD ,l′D , 88
RlD , 88
S lS ,l′S , 88
S lS , 88
T lD, 11
T lS , 11
VLext, 88
∇ · q(x), 5
ν, 3
ω, 54
ω0, 54
ω1, 54
∂D, 4
ψ(s), 64
ψlSiS
, 22
ψλ(x, s), 63
ψl,cT (s), 65
ψl,wT (s), 65
σ, 3
σs, 3
s · ∇x, 7, 8
Ω, 28
u, 39
uij , 42, 57
ϕ(x), 64
ϕlvi
(x), 64
ϕli(x), 84
ϕlDiD
, 21
~ξT 0D, 40
PL, 16
P l0,LTS
, 31
V L, 14
V L0 , 22
V LA , 66
V LG , 25
V Lp , 87
V l0,L, 25
u(x, s), 32
ur, 32, 36
uL(x, s), 16
ul0(x, s), 31
ζ, 54
ζ0, 54
ζ1, 54
V L0 L, 11
a(u, v), 9
120

bl′1i′1
(x), 86
c, 3c(x), 50d, 6d1, 4d2, 4dL+l
l,L+l−l(x, s), 35
dL+ll,L (x, s), 33eL, 11f , 84f(v), 9h, 8, 26hL, 14iD, 21iS , 22lm, 24n, 7q, 3t, 3u, 3u(x, s), 4u(x, s, ν, t), 3u0, 4uL, 11u∗Λ, 63u,ξ, 40u,ζ , 54uL+l
lD,lS(x, s), 33
M, 91
121

122

Bibliography
[1] S. Achatz, Adaptive finite dunngitter-elemente hoherer ordnung fur elliptische partielledifferentialgleichungen mit variablen koeffizienten., Ph.D. thesis, Technische UniversitatMunchen, 2003.
[2] H. W. Alt, Lineare Funktionalanalysis, 2nd ed., Springer Verlag, Berlin, 1999.
[3] W. An, L. M. Ruan, H. P. Tan, and H. Qi, Least-squares finite element analysis for transientradiative transfer in absorbing and scattering media, Journal of Heat Transfer 128 (2006),no. 5, 499–503.
[4] Travis M. Austin and Thomas A. Manteuffel, A least-squares finite element method for thelinear boltzmann equation with anisotropic scattering, SIAM Journal on Numerical Analysis44 (2006), no. 2, 540–560.
[5] R. Bellmann, Adaptive control processes: A guided tour., Princeton University Press, Prince-ton, 1961.
[6] L. Bourhrara, New variational formulations for the neutron transport equation, Transporttheory and statistical physics 33 (2004), no. 2, 93–124.
[7] H.-J. Bungartz, A multigrid algorithm for higher order finite elements on sparse grids,ETNA 6 (1997), 63–77.
[8] H.-J. Bungartz and M. Griebel, Sparse grids., Acta Numerica 13 (2004), 147–123.
[9] M. Cessenat, Theoremes de trace pour des espaces de fonctions de la neutronique, C.R.Acad. Sci. Paris Ser. I Math. 299 (1984), no. 16, 831–834.
[10] , Theoremes de trace pour des espaces de fonctions de la neutronique, C.R. Acad.Sci. Paris Ser. I Math. 300 (1985), no. 3, 831–834.
[11] A. Cohen, Numerical analysis of wavelet methods., Elsevier Amsterdam, Amsterdam, 2003.
[12] A. Cohen, W. Dahmen, and R. DeVore, Adaptive wavelet methods for elliptic operatorequations : Convergence rates., Math. Comp. 70 (2000), no. 233, 27–75.
[13] , Adaptive wavelet methods ii- beyond the elliptic case., Found. Comput. Math. 2(3)(2002), 203–245.
[14] A. Cohen, W. Dahmen, and R. DeVore, Adaptive wavelet techniques in numerical simula-tion., John Wiley and Sons, Ltd., New York, 2004.
[15] R. Dautray and J. L. Lions, Mathematical analysis and numerical methods for science andtechnology, vol. 6, Springer-Verlang, Berlin, 1993.
123

[16] T. Gantumur, H. Harbrecht, and R. Stevenson, An optimal adaptive wavelet method withoutcoarsening of the iterands., Math. Comp. 76 (2007), no. 258, 615–629.
[17] T. Gerstner and M. Griebel, Numerical integration using sparse grids., Numer. Algorithms18 (1998), no. 3-4, 209–232.
[18] V. C. Gradinaru, Whitney elements on sparse grids., Dissertation Eberhard-Karls-University Tubingen (2002).
[19] M. Griebel, Adaptive sparse grid multilevel methods for elliptic pdes based on finite differ-ences., Computing 61 (1998), no. 2, 151–179.
[20] V. H. Hoang and C. Schwab, High-dimensional finite elements for elliptic problems withmultiple scales., Multiscale Model. Simul. 3 (2005), no. 1, 168–194.
[21] C. Johnson, Numerical solution of partial differential equations by the finite element method,Cambridge University Press, Cambridge, UK, 1987.
[22] G. Kanschat, Parallel and adaptive Galerkin methods for radiative transfer problems., Ph.D.thesis, University of Heidelberg, 1996.
[23] T. A. Manteuffel and K. J. Ressel, Least-squares finite-element solution of the neutrontransport equation in diffusive regimes., SIAM J. Numer. Anal. 35 (1998), no. 2, 806–835.
[24] T. A. Manteuffel, K. J. Ressel, and G. Starke, A boundary functional for the least-squaresfinite-element solution of neutron transport problems., SIAM J. Numer. Anal. 37 (2000),no. 2, 556–586.
[25] M. F. Modest, Radiative heat transfer, 2nd ed., Academic Press, Amsterdam, 2003.
[26] H. Nguyen, Finite element wavelets for solving partial differential equations., Ph.D. thesis,University of Utrecht, 2005.
[27] P.-A. Nitsche, Best N -term approximation spaces for tensor product wavelet bases, Con-structive Approximation 24 (2006), no. 1, 49–70.
[28] J. Nordmans and P. W. Hemker, Application of an adaptive sparse-grid technique to a modelsingular perturbation problem., Computing 65 (2000), 357–378.
[29] C. Pflaum, Diskretisierung elliptischer differentialgleichungen mit dunnen gittern., Ph.D.thesis, Technische Universitat Munchen, 1996.
[30] L. M. Ruan, W. An, Tan H. P., and Qi H., Least-squares finite-element method of mul-tidimensional radiative heat transfer in absorbing and scattering media., Numerical HeatTransfer, Part A. 51 (2007), 657–677.
[31] S.-A. H Schneider, Adaptive solution of elliptic partial differential equations by hierarchicaltensor product finite elements., Ph.D. thesis, Technische Universitat Munchen, 1996.
[32] C. Schwab and R. Stevenson, Space-time adaptive wavelet methods for parabolic evolutionproblems., Math. Comp. 78 (2009), no. 267, 1293–1318.
[33] R. Siegel and J. R. Howell, Thermal radiation heat transfer, 4th ed., Taylor and Francis,New York, 2002.
[34] S. A. Smoljak, Quadrature and interpolation formulas for tensor products of certain classesof functions, Sovjet Mathematics. 4 (1963), 240–243.
124

[35] H. De Sterck, Thomas A. Manteuffel, Stephen F. McCormick, and Luke Olson, Least-squares finite element methods and algebraic multigrid solvers for linear hyperbolic pdes,SIAM Journal on Scientific Computing 26 (2004), no. 1, 31–54.
[36] T Von Petersdorff and C. Schwab, Numerical solution of parabolic equations in high dimen-sions., M2AN Math. Model. Numer. Anal. 38 (2004), no. 1, 93–127.
[37] R. Wehrse and W. Kalkofen, Advances in radiative transfer, Astron. Astrophysics. Rev. 12(2006), no. 1/2, 3–29.
[38] G. Widmer, R. Hiptmair, and C. Schwab, Sparse adaptive finite elements for radiativetransfer, Tech. Report 2007-01, SAM, ETH Zurich, Zurich, Switzerland, January 2007.
[39] , Sparse adaptive finite elements for radiative transfer, J. Comp. Phys. 227 (2008),no. 12, 6071–6105.
[40] Jinchao Xu, Iterative methods by space decomposition and subspace correction, SIAM Re-view 34 (1992), no. 4, 581–613.
[41] H. Yserentant, Sparse grid spaces for the numerical solution of the electronic schrodingerequation., Numerische Mathematik 101 (2005), no. 2, 381–389.
[42] C. Zenger, Sparse grids, Parallel algorithms for partial differential equations: Proceedingsof the Sixth GAMM-Seminar, Kiel, Vieweg-Verlag, 1990, pp. 241–251.
125

126

Curriculum Vitae
Gisela Widmer
June 16, 1978 Born in Schonenwerd, Switzerland
04/1985 – 07/1990 Primarschule in Kolliken, Niederscherli and Biberist
08/1990 – 07/1994 Kantonsschule Solothurn
08/1994 – 07/1998 Alte Kantonsschule AarauDegree: Matura type B (Latin)
10/1998 – 10/2000 4-term basic studies in mathematics at ETH ZurichDegree: 2nd Vordiplom in Mathematics
10/2000 – 07/2003 Teaching assistant at ETH Zurich
10/2000 – 03/2004 Advanced studies in computational science and engineeringat ETH ZurichDegree: Dipl. Rech. Wiss. (eqvl. MSc in CSE)Adviser: Prof. Dr. R. Hiptmair
Since 10/2004 Member of the Zurich Graduate School in Mathematics
Since 10/2004 Research and teaching assistantSeminar for Applied Mathematics, ETH Zurich
127

128





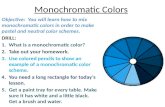










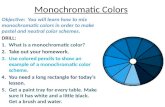
![The Existence of (s, t)-Monochromatic-rectangles in a 2 ... · monochromatic-rectangles in [3], we define the generalized monochromatic-rectangles and discuss the existence of such](https://static.fdocuments.us/doc/165x107/5fa9392818e985551817b402/the-existence-of-s-t-monochromatic-rectangles-in-a-2-monochromatic-rectangles.jpg)
