
In Copyright - Non-Commercial Use Permitted Rights ...21677/... · Die Bewegungsgleichung des...
98
Research Collection Doctoral Thesis Ueber Frequenzmodulatoren für Ultrahochfrequenz Author(s): Weber, Georg Publication Date: 1946 Permanent Link: https://doi.org/10.3929/ethz-a-000112773 Rights / License: In Copyright - Non-Commercial Use Permitted This page was generated automatically upon download from the ETH Zurich Research Collection . For more information please consult the Terms of use . ETH Library
Transcript of In Copyright - Non-Commercial Use Permitted Rights ...21677/... · Die Bewegungsgleichung des...

Research Collection
Doctoral Thesis
Ueber Frequenzmodulatoren für Ultrahochfrequenz
Author(s): Weber, Georg
Publication Date: 1946
Permanent Link: https://doi.org/10.3929/ethz-a-000112773
Rights / License: In Copyright - Non-Commercial Use Permitted
This page was generated automatically upon download from the ETH Zurich Research Collection. For moreinformation please consult the Terms of use.
ETH Library

Über Frequenzmodulatorenfür Ultrahochfrequenz
VON DER
EIDGENÖSSISCHEN TECHNISCHEN
HOCHSCHULE IN ZÜRICH
ZUR ERLANGUNG
DER WÜRDE EINES DOKTORS DER
TECHNISCHEN WISSENSCHAFTEN
GENEHMIGTE
PROMOTIONSARBEIT
VORGELEGT VON
GEORG WEBER
aus Winterthur
Referent: Herr Prof. Dr. F. Tank
Korreferent: Herr Priv. Doz. W. Furrer
ZÜRICH 1946
Dissertationsdruckerei AG. Gebr. Leemann & Co.
Stockerstr. 64

Erscheint als Nr. 5
der Mitteilungen aus dem Institut für Hochfrequenztechnik
an der Eidgenössischen Technischen Hochschule in Zürich
Verlag AO. Gebr. Leemann & Co., Zürich

MEINEN ELTERN

Inhaltsverzeichnis
Seite
Einleitung 5
I. Teil
Theoretische Untersuchungen über die Modulation von UHF-Oszillatoren 7
1. Kapitel: Die Modulationssysteme 7
§ 1. Begriffe und Definitionen 7
§ 2. Vor- und Nachteile der Verwendung von FM gegenüber AM 9
2. Kapitel: Die elektrischen Modulatoren 11
Die Impedanzröhre 12
§ 1. Schaltung und Wirkungsweise 12
§ 2. Die Impedanzröhre im Mittelwellengebiet IS
§ 3. Die Impedanzröhre im UHF-Gebiet 17
§ 4. Das Klystron als Impedanzröhre 22
§ 5. Diskussion 26
3. Kapitel: Die mechanischen Modulatoren 30
a) Der piezoelektrische Modulator 32
§ 1. Der piezoelektrische Effekt 32
§ 2. Aufbau des piezoelektrischen Modulators 35
§ 3. Die Bewegungsgleichung des piezoelektrischen Stabes . .36
§ 4. Diskussion 38
b) Der elektrostatische Modulator 43
§ 1. Die Bewegungsgleichung der Membran 43
§ 2. Die Durchbiegungsform der Membran 48
§ 3. Die Stabilität der Membran 53
§ 4. Die reduzierten Membrangrößen 58
§ 5. Diskussion 61
II. Teil
Konstruktion und Ausmessung eines elektrostatischen Modulators. . 70
4. Kapitel: Konstruktion des elektrostatischen Modulators... 70
§ 1. Zielsetzung 70
§ 2. Die Dimensionierung der Membran 71
§ 3. Die Dimensionierung des Nieder frequenzteiles .... 75
§ 4. Die Dimensionierung des Hochfrequenzteiles .... 77
§ 5. Der konstruktive Aufbau des Modulators 79
5. Kapitel: Messungen am elektrostatischen Modulator.... 84
§ 1. Meßmethoden und Meßapparatur 84
§ 2. Meßresultate 85
§ 3. Diskussion 90
Zusammenfassung 92
Literaturverzeichnis 94
3

Bezeichnungen
/ = Frequenz P = Leistung
0> = Kreisfrequenz £ = Dielektrizitätskonstante
L = Induktivität r = Relative Dielektrizitätskonstante
C = Kapazität (dimensionslos)R = Elektrischer Widerstand m = Masse
X = Blindwiderstand 8 — Spezifische Masse
8 = Schemwiderstand r = Mechanischer Widerstand
y = Leitwert s = Mechanische Steifigkeit
E = Elektromotorische Kraft F = Kraft
U = Spannung W = Arbeit
U = Wechselspannung n = Zugspannung (Kraft/Flache)© = Feldstarke T = Spannung der Membran (Kraft// = Strom Lange)
3 = Wechselstrom t = Zeit
A = Flache
a = Abstand Membran-Gegenelektrode (niederfrequenter Plattenabstand)b = Plattenabstand im Schwingtopf
Indices
t = Tragerfrequenzgroßen (UHF)o = Nichtperiodische (ruhende) Großen und Vorgange
m = Großen der Modulationsfrequenz (Tonfrequenz)
r = Resonanzpunkt— = Scheitelwert (Amplitude)
Alle Rechnungen wurden im elektrotechnischen (Qiorgi'schen) Maß'
system durchgeführt
4

Einleitung
Für viele Zwecke der modernen Hochfrequenztechnik hat sich
die Verwendung des Frequenzbereiches von 100—600 MHz als
besonders geeignet erwiesen. Vor allem auch für Anlagen zur
kommerziellen Nachrichtenübermittlung setzt sich
in neuerer Zeit die Ultrahochfrequenztechnik (kurz UHF-technik)mehr und mehr durch.
Dies ist hauptsächlich folgenden Faktoren zuzuschreiben:
Relativ einfach auszuführende, starke Bündelung der Energie in
eine bestimmte Richtung mit Hilfe von Richt-Sende- und -Emp¬fangsantennen; geringere Anfälligkeit auf atmosphärische und
andere Störungen mit Impulscharakter; außerordentlich großes,zur Verfügung stehendes Frequenzband.
Nachteilig wirkt sich die Beschränkung in der Reichweite auf
Sichtdistanz aus, was aber dadurch teilweise kompensiert wird,daß ortsfremde, auf gleicher Frequenz arbeitende Sender sich
gegenseitig nicht stören können.
Betrachten wir die Bausteine, die in der UHF-technik
des Frequenzbereiches von 100h-600 MHz, auf welchen sich die
Betrachtungen der vorliegenden Arbeit vor allem erstrecken, ver¬
wendet werden, so zeigt sich, daß die Röhren sich im grundsätz¬lichen Aufbau nur wenig von denen der Kurz- und Mittelwellen
unterscheiden, während sie konstruktiv in verschiedener Hinsicht
anders gestaltet werden. Die Oszillator- und Filterelemente ander¬
seits unterscheiden sich sowohl grundsätzlich als auch konstruktiv
von denjenigen der Kurz- und Mittelwellen, indem nicht mehr aus¬
schließlich solche mit konzentrierter, sondern auch solche mit ver¬
teilter Induktivität und Kapazität zur Verwendung gelangen (kon¬zentrisches Kabel, Paralleldrahtleitung, Hohlraumresonatoren).
Es werden außerdem Hohlraumresonatoren mit konzentrierter
Kapazität, sogenannte „Schwingtöpfe", verwendet, die sich,wie in verschiedenen Arbeiten [1, 2, 3, 4] gezeigt wurde, für UHF-
technik ganz besonders gut eignen.
5

.— Sender1 —
t
1
l-jSendtrM —
Z3senderê=i
i
i
i
i
i
.— hndcrh —
Sender grosserL
e
istung==g=
i
i., •..
i-
Fig. 1. Systeme für Vielfachübertragungen.
Die Schvvingtöpfe zeichnen sich vor allem durch ihre außer¬
ordentlich hohen Gütefaktoren Q aus und lassen damit sehr gute
Frequenzkonstanz des Senders und relativ schmale Filterdurchla߬
breiten zu. Die Frequenzkonstanz von Sendern mit solchen Hohl¬
raumresonatoren wird von Braun [4] mit 1^-2- \0'J angegeben,während die Eigenschaften von passiven Filtern bei UHF von
Staub in einer demnächst erscheinenden Arbeit diskutiert werden.
Für kommerzielle Nachrichtenübermittlung mit mehreren
Gesprächskanälen stellt sich dann die Frage, ob ein Sender mit
einer großen Zahl von aufmodulierten Gesprächen einem Systemvon mehreren nahe beeinander liegenden Sendern vorzuziehen sei,wobei alle diese Sender auf eine gemeinsame Antenne geschaltetund jedem nur eine kleine Zahl von Gesprächen aufmoduliert
würden (vgl. Fig. 1). Wir sind dabei der Ansicht, daß das letztere
System sich besser eignet, da es größere Betriebssicherheit bietet
und außerdem die Apparatur eher billiger wird, kostet doch eine
Senderöhre großer Leistung bedeutend mehr als mehrere Sende¬
röhren kleiner Leistung. Eine sichere Abklärung dieser System¬
frage wird aber erst nach gründlicher Untersuchung vieler Detail¬
probleme möglich sein, wozu die vorliegende Arbeit einen wei¬
teren Beitrag leisten will. Es werden nämlich die Möglichkeitenzur Modulation solcher Klein-Sender, entsprechend Fig. lb, unter¬
sucht. Dabei wurde vor allem eine möglichst gute Ausnutzung des
Frequenzbandes, welches wegen der nicht beliebig guten Filter¬
eigenschaften minimal beansprucht werden muß, angestrebt.Außerdem wurde auf eine möglichst geringe Verschlechterung der
Frequenzkonstanz durch den Modulator geachtet.
6

I.TEIL
Theoretische Untersuchungen über die Modulation
von UHF-Oscillatoren
1. KAPITEL
Die Modulationssysteme
In diesem Kapitel werden die in der Literatur schon ein¬
gehend beschriebenen Prinzipien der Modulation und die Vor-
und Nachteile der verschiedenen Modulationssysteme zusammen¬
fassend dargestellt.
§ 1 Begriffe und Definitionen
Betrachten wir die von einer Antenne ausgestrahlte elektro¬
magnetische Energie, so ist die elektrische Feldstärke an einer
bestimmten Stelle des Fernfeldes proportional:
S r>o £/sin(w*+ q>) = 11 (1)
Variieren wir die Amplitude U, die Kreisfrequenz tu oder den
Phasenwinkel q>, so können wir auf diese Weise eine Nachricht
übertragen und sprechen dann bekanntlich von Amplituden-, Fre¬
quenz- oder Phasenmodulation.
Es sei noch auf die Zeit- oder Impulsmodulation hingewiesen.Diese kann als Abart der Amplitudenmodulation betrachtet wer¬
den, erfordert aber wesentlich andere Schaltelemente und soll hier
nicht näher untersucht werden.
Da wir jede Nachricht nach Fourier in eine Summe von ein¬
zelnen Tonfrequenzen zerlegen können, so genügt es, wenn wir
in der Folge eine einzelne Frequenz dieses Spektrums betrachten
und hieraus auf den Gesamtverlauf schließen.
7

Setzen wir
,AU ]
1 + -yy- cos toit ; ut = w^; 99 =
bzw.
bzw.
U = £/* ; w£ = [w* -f //« cos ioit\ dt; <p <Po,
U = Ut; cot = o>tt\ <p = (pü -\- Acp sin w\t,
so geht der Ausdruck (1) in die Form über:
Amplitudenmodulation (AM): U = uA 1 +77-
cos w^\ sm (<ütt+<Fo)
Frequenzmodulation (FM) : IX-Ut sin ( wtt +— sin «11 + <po
Phasenmodulation (PM): 11= Utsin (<ott + A<psin coit + yo).
Man erkennt sofort, daß sich FM und PM nur unwesentlich
voneinander unterscheiden und sich daher auch in ihren Über¬
tragungseigenschaften kaum große Differenzen ergeben.Formen wir diese Ausdrücke etwas um, so erhalten wir, unter
Vernachlässigung der Anfangsphase:
Für AM: U= Utsin iott + -~- sin (iot f wi)t + -j-sin (wt- wi)t (2a)
Für FM: U = Ut S -M^-^) sin (wt +nco^t
}-oo
Für PM : U = Ut S h (A <p) sin (iot + n œi) t.
(2b)
(2c)
/m=10kHz_
/m = 2,5 kHz mii'hTir[liljUi.lil.jllL
a) Phasenmodulation. b) Frequenzmodulation.
Fig. 2. Seitenbänder bei Phasen- und Frequenzmodulation.
8

Der fundamentale Unterschied zwischen AM und FM, bzw.
PM zeigt sich darin, daß AM, unabhängig von der Modulations¬
tiefe, immer nur 2 Seitenbänder hat, deren Amplitude zudem maxi¬
mal halb so groß wie diejenige des Trägers werden kann. FM,bzw. PM, erhalten dagegen mit steigendem Am, bzw. Acp, immer
mehr und mehr Seitenbänder, deren Amplituden bedeutend größerals die Trägeramplitude werden können. Der Unterschied zwischen
FM und PM besteht lediglich darin, daß bei FM die Bandbreite
bei gleicher Modulationsamplitude, unabhängig von der Tonfre¬
quenz, ungefähr gleich bleibt, während die Zahl der Seiten¬
frequenzen mit sinkender Tonfrequenz zunimmt. Bei PM hingegenbleibt die Zahl der Seitenfrequenzen konstant, und die Bandbreite
nimmt mit steigender Tonfrequenz zu (vgl. Fig. 2).
In der Folge werden wir uns deshalb ganz auf die Unter¬
suchung der Unterschiede zwischen AM und FM beschränken, da
FM besonders auf der Empfangsseite geringeren Aufwand er¬
fordert als PM.
§ 2 Vor- und Nachteile der Verwendung von FM
gegenüber AM
Für die Beurteilung der Verwendbarkeit der beiden Modula¬
tionssysteme spielt das Verhältnis zwischen Nutz- und Störsignalim Empfänger die Hauptrolle. In der Literatur wurde dieses Pro¬
blem sehr eingehend behandelt, allerdings nur für Störsignale, die
klein sind gegenüber dem Nutzsignal. Neben vielen andern For¬
schern haben sich insbesondere Armstrong [5] auf experimen¬tellem, Crosby [6] und Veiled [7] auf theoretischem Weg ein¬
gehend damit befaßt. Es sei hier nur das Resultat festgehalten.Bezeichnen wir mit a das Verhältnis zwischen Nutz- und Stör¬
signal und mit ß das Verhältnis -——, so erhalten wir für kon-
tinuierliches Störspektrum, wie es vom Röhren- und Widerstands¬
rauschen herrührt,
UFM
~~~
yT ^ wmax'
*
9

Die Berechnung dieses Wertes stützt sich auf die folgendenVoraussetzungen :
Kleines Störsignal, idealer Amplitudenbegrenzer, linearer
Modulationsumformer sowie Beschneidung des Tonfrequenzver¬stärkers für mm > a>m,max im Empfänger.
Macht man somit den Faktor — in Gleichung (3) genügend
groß, so erhält man durch Verwendung der FM eine erhebliche
Verminderung des Störpegels im Empfänger. Dies ermöglicht also,trotz /?2-facher Verkleinerung der Sendeleistung bei FM, eine
ebenso gute Nachrichtenübermittlung zu erreichen, wie AM bei
voller Sendeleistung gewährleisten kann. Gelangt dann allerdingsder Störpegel in die Größenordnung des Nutzsignals, so erhält
man rasch eine bedeutende Verschlechterung von ß, weshalb auch
eine beliebige Vergrößerung des Modulationsindex —-^ sinnloswm, max
wird. In der Praxis hat sich ein solcher von 5 h- 10 als vorteilhaft
erwiesen.
Wir sehen aus obiger Darstellung und Gleichung (3) sofort,daß wir den Vorteil der Störverminderung gegenüber AM durch
den Nachteil einer größeren notwendigen Bandbreite für FM er¬
kaufen müssen. Durch die Erhöhung des Modulationsindex ent¬
steht nämlich eine Vergrößerung der Zahl der für die Übermitt¬
lung notwendigen Seitenbänder, weshalb auch die benötigte Band¬
breite größer wird. Dies spielt aber im allgemeinen für UHF-
Übertragungen keine Rolle, da ja, im Gegensatz zu den Mittel¬
wellen, sehr große Frequenzbänder für kommerzielle Übertragun¬gen zur Verfügung stehen.
Während FM somit auf der Empfangsseite bedeutende Vor¬
teile gegenüber AM aufweist, zeigt es sich, daß auf der Sendeseite
die Verhältnisse anders liegen. Insbesonders bei UHF ist nämlich
die Modulationstechnik für FM bedeutend kompli¬zierter als für AM. Bei AM kann die Modulation in irgendeinerVerstärkerstufe ohne Beeinträchtigung der Frequenzkonstanz des
Oszillators vorgenommen werden. Bei FM dagegen muß die Mo¬
dulation selbstverständlich im Oszillator ausgeführt werden; es
sei denn, man wähle das sehr komplizierte und für Kleinsender gar
10

nicht geeignete Modulationsverfahren von Armstrong [5], welcher
eine kleine PM durch ein vorgeschaltetes Netzwerk in eine sehr
schwache FM umwandelt und hernach durch sehr bedeutende Fre¬
quenzvervielfachung den notwendigen Frequenzhub erreicht.
Um den großen Vorteil der FM gegenüber AM auf der Emp¬
fangsseite ausnützen zu können, müssen wir den oben erwähnten
Nachteil mittels einer der folgenden Methoden beheben: Entweder
durch Frequenzüberwachung mit Hilfe von Schwing¬
quarzen, was bei größeren Sendern durchwegs üblich ist, oder
durch solche Gestaltung des Modulators, daß die Verschlechterungder Frequenzkonstanz des Oszillators auf ein Minimum reduziert
wird. Da die Ausführung des ersteren Prinzips einen sehr großenAufwand an Schaltelementen erfordert und man zudem auf die
Verwendung der Schwingtöpfe mit ihrer Abstimmbarkeit auf be¬
liebige Frequenzen verzichten muß, haben wir uns zur Aufgabegestellt, in der vorliegenden Arbeit einen Beitrag zum Studium der
dämpfungsarmen Frequenzmodulatoren im UHF-
Gebiet zu leisten.
2. KAPITEL
Die elektrischen Modulatoren
Haben wir die Absicht, eine Nachricht durch Modulation der
Frequenz eines UHF-Generators zu übermitteln, so müssen wir
die Reaktanz des frequenzbestimmenden Gliedes des Oszilla¬
tors veränderlich machen.
Die Resonanzfrequenz eines Schwingkreises hat die Größe:
2nft = —L^.HtCt
Setzen wir Ct = C, — AC, so bewirkt diese Kapazitätsänderungeine Änderung der Resonanzfrequenz:
2*17/ + Aß =]
.
\Lt{C,+ ACt)
11

Durch Reihenentwicklung und Umformung erhält man:
AAC 3 /IC2,
I...
Setzt man AC = AC cos comt, so entsteht ein Klirrfaktor K.2 von
K2 =Y~ct-'
(5)
der im allgemeinen nur sehr kleine Werte annehmen wird.
Führt man diese Änderung der Reaktanz auf elektrischem
Weg durch, so wird es leicht gelingen, diese trägheitsfrei zu
realisieren, d. h. lineare Verzerrungen der Modulationscharakte¬
ristik infolge Resonanzerscheinungen zu vermeiden. Dagegen wird
es schwieriger sein, den Oszillator durch das Modulationsnetzwerk
nicht zusätzlich zu dämpfen.
Zur elektrischen Modulation zeigen sich vor allem zwei Wege,nämlich:
a) Die Modulation mit Hilfe einer Impedanzröhre.
b) Die Modulation durch Veränderung der Raumladung eines
Kondensators.
In der vorliegenden Arbeit wird die Verwendung der Impe¬danzröhre bei UHF eingehend diskutiert. Die Untersuchung über
die Möglichkeiten der Frequenzmodulation durch Variation der
Raumladung wird dagegen weggelassen, da es sich vor allem um
ein Problem der Elektronentechnik handelt.
Da unsere Untersuchungen insbesonders Probleme schal¬
tungstechnischer und konstruktiver Natur behandeln, würde dieses
spezielle Teilproblem über den Rahmen dieser Arbeit hinausgehen.
Die Impedanzröhre
§ 1 Schaltung und Wirkungsweise
Die „Impedanzröhre", wie das in Figur 3a dargestellte Netz¬
werk bezeichnet wird, stellt einen Zweipol dar, sofern wir nur
seine hochfrequenzführenden Klemmen betrachten. Die Eingangs¬
impedanz dieses Zweipols bildet somit direkt das Kriterium für
12

die Eignung dieses Netzwerkes als Frequenzmodulator. Schalten
wir ihn nämlich parallel zum frequenzbestimmenden Schwingkreiseines Oszillators, so wird der Imaginäranteil der Zweipolimpedanzeine Frequenzänderung und ihr Realteil eine zusätzliche Dämp¬fung des Oszillators zur Folge haben.
Zur Realisierung einer Frequenzmodulation ohne Beeinträch¬
tigung der Frequenzkonstanz des Oszillators hat man deshalb
dafür zu sorgen, daß der Imaginärteil der Zweipolimpedanz in
linearer Weise gesteuert wird und ihr Realteil möglichst klein
bleibt.
J9K Ja*
m éfl'WSr $| Vk
Netzwerk der
Impedanzröhre Höhrenyierpol.Rückkopplungs¬vierpol
Fig. 3. Schema der Impedanzröhre.
Betrachten wir das in Figur 3a dargestellte Netzwerk, so
können wir vorerst für die Röhre allein die Vierpolgleichungenformulieren, wobei wir in der Folge der Einfachheit halber statt
mit Widerständen mit Leitwerten rechnen (Fig. 3b).
O
àgR
"àoR
: yn Kg + yn Ka
- J21 Ug + ^22 tt« .
Die Leitwertsmatrix der Röhre wird damit:
te =yu yi2
J21 J22
(6)
(7)
Die Matrix der als Vierpol geschalteten Rückkopplungsleit¬werte erhält die Form (Fig. 3c) :
*)Kyi+y-2,
—y2,
-J2
/2(8)
13

Schalten wir die beiden Vierpole parallel, so realisieren wir
damit eine in ihrer Größe und Phasehlage noch unbekannte Rück¬
kopplung der Röhre. Die Leitwertsmatrix des resultierenden Vier¬
pols erhalten wir durch Addition von i)R und t)K zu:
(9)j>u +yx+ yz, y\i—y-i
y2i—y2, J12+J2
Oder in die Vierpolgleichungen eingesetzt:
&* + ÜW = 3* = (yn +yi+ y2) u, + {yn —ys) Ka
%aR + %aK = Sa = (/21 —^2) ^ + (^22 + J2) Ua .
Da keine äußeren Zuführungen an die Gitterklemmen gelangen,können wir %g = 0 setzen, wodurch sich der Vierpol auf einen
Zweipol mit dem Leitwert
711^22 - J12J21 +^2 Oll +J22 + yi2 +J21 +Jl] +^1^22(10)
J'll +Jl fJ2
reduziert.
Da die Röhrengrößen weitgehend vorgeschrieben sind, kön¬
nen wir den Verlauf lediglich durch die Wahl der Rückkopplungs¬leitwerte y1 und y2 beeinflussen. Wir betrachten deshalb in der
Folge y als Funktion von y2> m^ )'\ ^s Parameter.
Durch Umgruppieren und Auflösen nach y2 erhält dann Glei¬
chung (10) die Form:
(yn +J'i)0'i +.K11 r Jte +J21) +712^21y = yi +/11 +J12 +J21 +.T22 -
yu +ji +jaOl)
yag
Ïa -"%è
Fig. 4. Ersatzschema der Verstärkerröhre.
Die Röhrengrößen können wir aus dem Ersatzschema der Ver¬
stärkerröhre (Fig. 4) berechnen:
yu = yg+yag, yn = -yag, J21 = 5-yag, y22 = yag+ya
14

Führt man diese Substitutionen in Gleichung (11) ein, so wird
§ 2 Die Impedanzröhre im Mittelwellengebiet
Zur besseren Verdeutlichung der Arbeitsweise der Impedanz¬röhre sei kurz der Verlauf des Eingangsleitwerts unseres Zwei¬
pols betrachtet, bei Verwendung einer steilen HF-Penthode im
Mittelwellengebiet.Unter diesen Voraussetzungen kann Gleichung (IIa) durch
verschiedene Vernachlässigungen stark vereinfacht werden und
erhält die Form:
. c yi (yi + S)
yi -t yi
Machen wir außerdem yt « S, so wird
1y
J2 J
(12)
Bezeichnen wir das für die Rückkopplung charakteristische Leit¬
wertverhältnis:
yi_
\yi\eJ(Vl~vj _ yeJv _ jç
y2 \ y2 \
so ersehen wir sofort, daß man durch eine lineare Trans-s
Viformation aus — erhält. Die /(-Ebene wird dabei konform in
yy*
die --Ebene abgebildet. Da es sich bei den Kurven x = konstant
und <p = konstant um orthogonale Kreise, bzw. Geraden, handelt,werden sie wieder in orthogonale Kreise oder Geraden überge¬führt werden. Figur 5 veranschaulicht diese konforme Abbildung.Der oo-ferne Punkt der A>Ebene geht dabei in den O-Punkt und
der O-Punkt der /(-Ebene in den Punkt +1 der -Ebene über.s
Da y± und y2 passive Schaltelemente sind, darf die negativreelle /(-Achse nicht überschritten werden, wenn man <p im posi-
\y

tiven oder negativen Sinne wachsen läßt. Durch die Zugehörigkeitdes O-Punktes und des unendlich fernen Punktes zur negativ re¬
ellen Achse erklärt sich, warum die Kreise konstanten Phasen¬
winkels in den Punkten 0 und +1 der Bildebene unterbrochen
werden. Könnten yt und y2 auch negative Realteile haben, so
würden je zwei sich überdeckende Original- und Bildebenen ent¬
stehen.
Af-Ebene
a b
Fig. 5. Impedanzröhre im Mittelwellengebiet.
Ermittlung des Eingangsleitwerts mittels konformer Abbildung.
Dabei würden z. B. die Kreise für cp = 60° und <p = —120°
in der Bildebene zusammenfallen, während sie sich in unserm Fall
zum Vollkreise ergänzen, wobei der eine Kreisteil in der untern,
der andere in der oberen Halbebene liegt.
Figur 5 zeigt uns, daß es für jeden Wert des Betrags r.
1 <J 7. < OO
einen bestimmten Phasenwinkel cp gibt, für welchen der Realteil
des Zweipolwerts verschwindet. Für x = oo nimmt y zudem
immer den Wert 0 an.
Praktisch kommen aber nur Werte von % in Frage, die be¬
deutend größer als 10 sind. Sonst gelangen nämlich bei Parallel¬
schaltung des Modulatorzweipols zum Oszillatorschwingkreis viel
zu große HF-Spannungen an das Gitter der Modulatorröhre. Dies
16

aber hätte Übersteuerung der Impedanzröhre zur Folge und damit
das Entstehen von Modulationsverzerrungen. Man wird deshalbbei Mittelwellen immer mit Phasenwinkeln cp, die sehr nahe bei90° liegen, arbeiten müssen.
Obige Diskussion und Gleichung (12) zeigt uns somit, daßbei Mittelwellen und geeigneten Röhren eine Modulation der Fre¬
quenz durch Variation der Steilheit einer Röhre immer dämpfungs¬frei realisiert werden kann.
Es sei hier noch darauf hingewiesen, daß bei Berücksich¬
tigung von ya und yag bei der Abbildung eine kleine Drehung des
Systems durchgeführt werden muß, die es gestattet, auch bei
cp = —90° einen endlichen, rein reaktiven Zweipolleitwert zu er¬
halten. Dies ist für die praktische Ausführung natürlich von Be¬
deutung, werden doch die Rückkopplungsleitwerte auf diese Art
sehr einfach.
§ 3 Die Impedanzröhre im UHF-Gebiet
Im UHF-Gebiet liegen nun die Verhältnisse bei der Impe-danzröhrenmodulation wesentlich komplizierter. Vor allem ist eine
Vereinfachung von Gleichung (IIa) nicht mehr möglich. Sämtliche
Röhrengrößen, mit Ausnahme von yag, werden komplex, wodurcheine einfache und allgemeine Darstellung, ähnlich dem vorherigenParagraphen, unmöglich wird.
Für die weitere Diskussion ist deshalb eine sehr weitgehendeSpezialisierung notwendig. Insbesonders stützen sich die folgen¬den Betrachtungen nur auf eine bestimmte Röhre, die TelefunkenUHF-Penthode RV 12 P 2000. Ihre Eigenschaften schienen uns
nämlich typisch für die bisher bei UHF verwendeten Röhren. Zu¬dem konnten wir alle notwendigen Daten über dieselbe aus derArbeit von Kleen [8] erfahren. Etwas bessere Resultate könntenhöchstens noch durch Verwendung von Knopfpenthoden erzielt
werden, für welche uns aber die notwendigen detaillierten An¬
gaben fehlten.
In der Folge sei das Verhalten des Eingangsleitwerts unseres
Zweipols, entsprechend Gleichung (IIa), diskutiert, wobei y2 alsVariable und y1 als Parameter gewählt wurden.
17

Für sämtliche UHF-Röhren der handelsüblichen Bauart ist
der relativ große Real teil des Gitterleitwerts typisch.Dieser rührt einerseits von der endlichen Durchlaufszeit der Elek¬
tronen durch den Kathoden-Gitter-Raum her und ist anderseits
bedingt durch die Kopplungsvorgänge in dem komplizierten Netz¬
werk, das die Röhre mit ihren Zuleitungen darstellt. Da der Rück¬
kopplungsleitwert y1 und der Gitterkathodenleitwert der Röhre
y>z eine Einheit bilden, wird man y: zweckmäßig nur rein imaginäreWerte annehmen lassen. Auf diese Weise kann
ye = yi + ys
jeden beliebigen Phasenwert zwischen —90° und -j-90° annehmen,
wobei sein Absolutwert immer so klein wie möglich bleibt.
Fig. 6. Impedanzröhre im UHF-Gebiet.
Admittanzdiagramm y = /(|>'2j, <p2) für yc = yg, }\ = ü.
Figur 6 stellt das Kreisdiagramm }'=/(!j;o|,9?2) ^ur einen
bestimmten Wert von yx dar. Es wurden dabei nur diejenigenTeilkreise gezeichnet, die positivem Realteil von y, entsprechen.Die Teilkreise für ç?2 = —90° und Q92 = +90° ergänzen sich zu
einem Vollkreis, den wir „Grenzkreis" nennen wollen. Er
hat eine ganz besondere Bedeutung, da sein Schnittpunkt mit
18

der imaginären y-Achse denjenigen rein imaginären Eingangs¬leitwert unseres Modulationszweipols liefert, für welchen der
absolute Betrag \y2\ am kleinsten wird. ]y2\ ist aber möglichstklein zu halten, um die rückgekoppelte Spannung und damit die
Gitteraussteuerung der Impedanzröhre auf einen minimalen Betragzu beschränken.
Gleichung (8) liefert uns nämlich für die Rückkopplung die
Beziehung:
Setzen wir
so erhalten wir für
ye
ye
0 + ki)- + kr-(13)
Die Grenzkreise und insbesonders ihre Schnittpunkte mit der
imaginären y-Acbse charakterisieren folglich die Eignung der
Reaktanzröhre für dämpfungsfreie Frequenzmodulation im UHF-
Gebiet am besten.
Von Gleichung (IIa) ausgehend, wurden deshalb die Schnitt¬
punkte der Grenzkreise mit der imaginären y-Achse berechnet unddie zugehörigen Werte von y2 bestimmt.
Für die Beurteilung der Eignung der Schaltung zu Modula¬tionszwecken spielt noch ein weiterer Faktor eine bedeutendeRolle: Zu einem festen Anteil des Eingangsleitwerts addiert sichnämlich ein von der Steilheit der Röhre abhängiger, modulierender
Betrag, was die folgende Umformung der Gleichung (IIa) illu¬striert:
y=yr+ys=ya+(yi+ye)U—r^^r-l+^fi l^g-—1.
(14)JUl yi+yg+yag+y2i l yi+ye+yae+y2\ v '
Figur 7 vermittelt ein Bild über den Verlauf der LeitwerteJV, J'oT.Vas. )'r und ys, während in Figur 8 der absolute Betrag K
19

y«
ro'JiJmÙs)TO *J.
yz*y>gIS W*1
\
ufff )
13ye-'I "J
N <h*y*g*f(r,) 6 n
JmMl'fP.) 11
i JmtorM*} S 10
,/ 9
< 8
rIT-''
7
A 3 6
/ \ S
' \ Z
3
1 2
1
90° -7S' •BO' -«• -30° -IS' 15° 30° 1S° 60° 90° JJ
Fig 7 Impedanzrohre im UHF-Gebiet Verlauf der Schaltungsleitwertefur dampfungsfreie Modulation und minimale Ruckkopplung
Jrnfy,) Jmfjh)
-*h.f(r.)
J">(ytt)ffli)
Ofi
0.1
-ISO'
-170°
-ISO'
-ISO'
-no°
-130°
-120°
-110°
-100°
-90°
1 \
\ \
\
1 X.
\
V
/
-H-
'/
90° -75' -60° -tfS -30 IS' 30° W 60° 7S° 90°%
Fig 8 Impedanzrohre im UHF-Qebiet. Modulationsgroßen fur
dampfungsfreie Modulation und minimale Ruckkopplung.
20

und der Phasenwert cpK der Rückkopplung und die Quotienten
——- sowie ?C ; 4 dargestellt wurden.A ^ (yR)
Als unabhängige Variable wurde für die ganze Berechnungder Phasenwinkel cpe des Leitwerts ye = y± -j- yg gewählt.
Da wir uns, abgesehen von der Impedanzröhre selbst, wieder
auf passive Schaltelemente beschränken, kann cpe nur Werte zwi¬
schen — 90° und +90° annehmen. cpK muß aber den Betrag von
+ 90° übersteigen, um entdämpfend zu wirken, so daß an sich
nur Werte von cpe zwischen 0 und +90° möglich wären (vgl. Glei¬
chung (13)). Dieser Bereich wird hauptsächlich infolge des nega¬tiven Phasenwinkels der Röhrensteilheit transponiert und durch
den Einfluß der übrigen Schaltelemente noch unwesentlich ver¬
kleinert. Es sind dann schließlich noch für
+ 29° <: <pe <: + 90° und — 90° ^ <pe <: — 73°
Schnittpunkte der Grenzkreise mit der imaginären y-Achsemöglich.
Als wichtigstes Resultat ist festzustellen, daß der Betrag Kder Rückkopplung nie kleiner als 0,2 wird. Schaltet man den
Modulationszweipol parallel zum Anodenschwingkreis eines UHF-
Oszillators, so wird die Reaktanzröhre infolge dieser sehr be¬
trächtlichen Rückkopplung stark übersteuert.
Vermindern wir anderseits die Amplitude der UHF-Spannungan den Zweipolklemmen durch transformatorische Ankopplung an
den Oszillatorschwingkreis, so hat diese Maßnahme umgekehrtauch eine entsprechende Herabsetzung der vom Modulationszwei¬
pol an den Oszillatorschwingkreis gelieferten Blindströme zur
Folge. Dies aber führt zu einer Verkleinerung des Frequenzhubsum den Betrag des Übersetzungsverhältnisses.
Der von der Steilheit der Röhre abhängige Anteil des Zwei-
poleingangsleitwerts nimmt an den Bereichrändern den Maximal¬wert an und geht in der Mitte des Bereichs durch den Nullpunkt.
°s (v )Auch der Quotient ^L^IL zeigt einen ähnlichen Verlauf. Mit
K
Rücksicht auf den Betrag der Rückkopplung ist es aber nicht
möglich, an einem der Ränder zu arbeiten, sondern man wird
21

einen Kompromiß zwischen Rückkopplungsbetrag und Modula¬
tionstiefe schließen müssen.
Die Verwendung der Impedanzröhre bei diesen hohen Fre¬
quenzen bereitet aber aus andern Gründen noch erhebliche Schwie¬
rigkeiten. Betrachtet man Gleichung (14), so erkennt man leicht,
daß der Größe y1 -\- yg eine große Bedeutung im Modulations¬
netzwerk zukommt. Bei den bisher üblichen intensitätsgesteuertenRöhren besteht yg im wesentlichen aus der Raumladungs¬
kapazität. Diese wechselt bei einer Veränderung der Röhren¬
steilheit durch Variation der Gittervorspannung ihren Betrag in
sehr bedeutendem Maße. Hierdurch wird y, den Charakter eines
festen Leitwerts verlieren. Für starke Rückkopplung wird zudem
der Ausdruck
!yi+ys
yi+yg + yag + y-2
variabel werden, was zu Verzerrungen führen wird. Diese können
unter Umständen sehr bedeutend werden.
Bei Verwendung von geschwindigkeitsgesteuertenRöhren können aber verschiedene der oben beschriebenen Nach¬
teile beseitigt werden, weshalb im folgenden Paragraphen diese
Möglichkeit kurz skizziert werden soll.
§ 4 Das Klystron als Impedanzröhre
Für viele Zwecke der UHF-Technik eignen sich die Röhren
mit Geschwindigkeitssteuerung des Elektronenstrahls — Klystron
genannt — besser als diejenigen mit Intensitätssteuerung. Sobald
die Durchlaufszeit eines Elektrons durch den Steuerraum vergleich¬bar mit der Periodendauer der UHF wird, hat die geringe Strahl¬
geschwindigkeit der intensitätsgesteuerten Röhre einen großen
Realteil des Gitterleitwerts zur Folge. Beim Klystron dagegenwird die Eingangsdämpfung unbedeutend, da die
Strahlgeschwindigkeit sehr groß und deshalb, bei gleicher Steuer¬
spannung, die relative Geschwindigkeitsänderung klein wird (vgl.
Figur 9). Außerdem wird bei der intensitätsgesteuerten Röhre
die Rückwirkung des Ausgangs auf den Eingang der Röhre infolgeder Elektrodenzuführungen ziemlich groß. Auch dieser Nachteil
22

fällt beim Klystron weitgehend dahin. Die Rückwirkung des Aus¬
gangsraums auf den Steuerraum wird nämlich sehr klein, da der
Laufraum L mehrere Strahlwellenlängen ?.st beträgt, wobei
Ist = -7- bedeutet.U
Fig. 9. Prinzipschema des Klystrons.Nach [10],
Die Funktionsweise des Klystrons wurde in der Literatur ein¬
gehend beschrieben [9, 10, 11], wobei sich die nachfolgenden
Betrachtungen vor allem auf die Arbeiten von Webster stützen.
Wird an den Steuerraum eine Wechselspannung angelegt, so hat
diese eine Beschleunigung oder Verzögerung der durchfliegendenElektronen zur Folge.
Im Laufraum formieren sich die mit verschiedener Geschwin¬
digkeit laufenden Elektronen zu Paketen. Diese haben im Aus¬
gangsraum durch Influenz einen Wechselstrom in den Elektroden
zur Folge.
Figur 10 illustriert eine Möglichkeit, das Klystron zur Fre¬
quenzmodulation eines Oszillators zu verwenden.
Es sei
& = heJ»tt
der Schwingstrom des Schwingtopfes, der als frequenzbestimmen¬des Glied eines Oszillators wirkt.
Dann wird die Auskopplungsschleife die Spannung
U2 = tot- Mhej(ati~'f)
23

71/ »"H'iiiir'Uli <>>Mi'">i
I&
! !..
IW
Il Hi
J'.M,I'UU
Mil"1I til'! 'i*
! >'!'
i!ü:! >'!l
i ii :
Fig. 10. Klystron als Impedanzröhre.a = Oszillatorröhre, b = Frequenzbestiminender Kreis, c = Modtilatorröhre.
abgreifen. Die Zuleitung wird, bei Anpassung, an den Steuerraumdes Klystrons, die Spannung
U3 = üit- M • I1e'(att-T + 'p») — U3ej(att-IïJr,p>)führen.
Diese Spannung wird den Elektronenstrahl, der mit der Ge¬
schwindigkeit v0 in den Steuerraum eintritt, mit der Geschwindig¬keit
,
tji= vxeJ\att'^ + ^
modulieren. Auf Grund des Energiesatzes wird dabei
m[yo+ vi]2rrr . ,,-,
—1~2=
e\Uü + i/3] ,
wenn U0 die Beschleunigungsspannung des Strahls, m die Masse
und e die Ladung eines Elektrons bedeutet.
Macht man UQ » U3, so wird:
m vo vi = e • Uz .
Und somit: öi = n' 2 V2V .
mvo
24

Nach Webster wird dann die Grundhannonische des Strahl¬
stroms im Ausgangsraum
3* = 2 • /o /! [^^] e^'-J**"*"»),
wobei /0 den unmodulierten Strahlstrom, Z. die Länge des Lauf¬
raums und f1 die Besselfunktion erster Ordnung darstellt. <p31ist von der Länge des Laufraums, bzw. von der Strahlgeschwindig¬keit abhängig.
Da QLi^Sot) erhalten wir für den Strom in den Ausgangs¬elektroden :
^m^2.I0.J1[^^^^]e^-^^^). (15)
Machen wir durch geeignete Wahl der Beschleunigungsspan¬nung U0
TT
q>2z -r <pu — y~ k ' n> (15a)
wobei k irgendeine ganze Zahl bedeutet, so ist der modulierende
Strom %n in Phase oder Oegenphase zum Schwingstrom %x und
wird deshalb eine Veränderung der Blindkomponente zur Folgehaben. Dies aber kommt einer Verschiebung seiner Resonanzfre¬
quenz gleich. Verändert man nun auf irgendeine Weise den
Strahlstrom /„ des Klystrons im Takt des niederfrequentenSignals, so hat dies eine Modulation der Oszillatorfrequenz zur
Folge.In der oben beschriebenen Darstellung der Funktionsweise
des Klystrons wurde allerdings bis zu einem gewissen Grade ideali¬
siert, indem sowohl die Kopplungsfaktoren zwischen Elektroden
und Strahl im Steuer- und Ausgangsraum, als auch die gegenseitigeAbstoßung der Elektronen, die der Paketierung entgegenwirkt,vernachlässigt wurde. Für die hier angestrebte, grundsätzlicheBetrachtung spielt dies aber keine Rolle.
Es sei noch darauf hingewiesen, daß ein Klystron, als Oszilla¬
tor geschaltet, durch Variation der Beschleunigungsspannung auf
einfache Art in seiner Frequenz moduliert werden kann. Die da¬
durch bedingte Störung der Phasenbilanz des Oszillators kann
25
/

nämlich nur durch eine Frequenzänderung, bzw. durch die daraus
resultierende Phasendrehung in den Schwingkreisen, korrigiert
werden. Bei Schwingkreisen mit großen Gütefaktoren Q vor allem
ist dieses Modulationsprinzip aber immer mit beträchtlicher
Amplitudenmodulation verbunden, sofern der Frequenzhub eine
gewisse Größe erreichen soll.
§ 5 Diskussion
a) Frequenzhub des Modulators
Bei der intensitätsgesteuerten Impedanzröhre hängt der maxi¬
mal mögliche Frequenzhub des Modulators von der Röhre selbst,
von der Schwingspannung am frequenzbestimmenden Kreis und
der zulässigen Gitterspannung der Impedanzröhre ab.
Da man für frequenzkonstante UHF-Oszillatoren den fre¬
quenzbestimmenden Kreis auf der Anodenseite der Oszillatorröhre
Fig. 11. Ankopplung der Impedanzröhre an den frequenzbestimmenden
Schwingkreis.
anbringen muß, wird die am Kreis liegende Wechselspannungbeträchtliche Werte annehmen. Setzen wir eine Anordnung nach
Figur 11 voraus, so wird
(16)
Die Induktivität des Schwingtopfes mit angekoppeltem Modu¬
lationszweipol erhält die Form:
ojtM2W = U
L{ = U
cotLz + ~
y tot • Mv-
1 +ywtL2'
26

In allen praktischen Fällen ist die Ungleichung ywtL2(( 1 genü¬
gend genau erfüllt, so daß man vereinfachen kann auf:
U' = U—y- wt-M*. (17)
Und mit Gleichung (16) :
Setzen wir im weiteren y = yr -]- ys, so wird
Damit erhalten wir nach Gleichung (4) einen Frequenzhub von der
Größe:, / n \° r
Beispiel: Impedanzröhre : RV 12 P 2000
üa<osz = 30 Volt
Ug = 0,6 Volt
U = 10~8 Henry
/, = 200 MHz.
Mit den günstigsten Werten aus Figur 7 und 8 erhalten wir
somit einen Frequenzhub von nur 8,8-102 Hz, trotzdem die
Anodenwechselspannung des Oszillators sehr klein gewählt wurde.
Außerdem ist dieser Wert nur unter der Voraussetzung zu
erreichen, daß sich die Steilheit in einem Bereich 0 < S < Smaxvariieren lasse, was praktisch nie der Fall ist. DämpfungsfreieModulation der Frequenz mit Hilfe der intensitätsgesteuertenRöhre ist somit bei diesen Frequenzen nur für sehr geringen Fre¬
quenzhub zu realisieren.
Kümmern wir uns nicht um die Dämpfung des Oszillator¬
kreises durch die Impedanzröhre, so erreicht der Frequenzhub bei
gleichem Spannungsverhältnis und Verwendung derselben Röhre
den Wert:J/ = 2,64-10» Hz.
27

Man ersieht daraus, daß allein schon die geringe Röhrensteil¬
heit dem Bau geeigneter Frequenzmodulatoren auf dieser Basis
im Wege steht. Diese Schwierigkeit wird noch dadurch erhöht,daß im UHF-Gebiet durchwegs relativ niederohmige Oszillator¬
schwingkreise verwendet werden müssen [4], um einen Neben¬
schluß durch die großen Röhrenwirkleitwerte zu vermeiden. Ein
niederohmiger Kreis verlangt aber einen großen Betrag des modu¬
lierenden Zweipoleingangsleitwerts.Beim Klystron sind die Verhältnisse schwieriger zu über¬
blicken, da uns die notwendigen Angaben fehlen.
Es wird hier
L m v03 Jàt = n—^27T^ ' (19)
d. h. der Frequenzhub ist abhängig vom Verhältnis zwischen
Schwingstrom im Kreis und Strahlstrom des Klystrons einerseits,und einer durch die Kreiseigenschaften und die Beschleunigungs¬
spannung des Klystrons gegebenen Größe anderseits.
Benützen wir als Oszillator die gleiche Anordnung wie beim
obigen Beispiel und verwenden ein Klystron mit
Ua = 2000 Volt
/o = 10 mA
L « 21S(,
so erhalten wir einen Frequenzhub:
Aftm 5- 103 Hz.
Verwendet man als Oszillatorröhre ebenfalls ein Klystron,so gestattet das die Verwendung von Schwingtöpfen mit viel
größerem Parallelwiderstand, wodurch eine bedeutende Steige¬
rung des Frequenzhubs möglich wird. Es zeigt sich somit, daß
auch von der Modulation aus bei UHF nicht mehr intensitäts¬
gesteuerte Röhren verwendet werden sollten.
b) Einfluß auf die Stabilität des Oszillators
Bei der intensitätsgesteuerten Röhre müssen wir, wie oben
gezeigt wurde, auf dämpfungsfreie Modulation verzichten. Die
28

dadurch entstehende Verschlechterung des Oszillatorschwing-topfes hat eine Beeinträchtigung der Stabilität des Oszillators zur
Folge.Zudem wird die Spannungsabhängigkeit von yr in Gleichung
(14) eine weitere Quelle von unerwünschten Frequenzschwankun¬gen sein. Die quantitative Abschätzung dieser Einflüsse ist von
Fall zu Fall sehr verschieden und zudem den Einflüssen der Oszil¬
latorröhre [4] sehr ähnlich, so daß sich hier eine ausführliche
Diskussion erübrigt.Beim Klystron werden sich vor allem Schwankungen der Be¬
schleunigungsspannung nachteilig äußern, da diese Dämpfung,bzw. Entdärnpfung, des Oszillatorschwingtopfes zur Folge haben.
c) Verkoppelte Amplitudenmodulation
Da ys bei der intensitätsgesteuerten Röhre im allgemeinenkomplex ist, wird durch Variation der Steilheit auch die dämpfendeKomponente von y variiert, was eine Amplitudenmodulation des
Oszillators zur Folge hat.
Moduliert man mit Hilfe eines Klystrons, so ist keine Ampli¬tudenmodulation zu erwarten, sofern die Beschleunigungsspan¬nung richtig gewählt und gut stabilisiert wird.
d) Störmodulation
Nennenswerte Störmodulation ist bei der Frequenzmodulationmit Hilfe der Impedanzröhre nicht zu erwarten.
e) Lineare Verzerrungen
Da das hier besprochene Modulationsprinzip für Tonfrequen¬zen trägheitsfrei arbeitet, können lineare Verzerrungen bei geeig¬neter Dimensionierung des Modulationsverstärkers leicht ver¬
mieden werden.
f) Nichtlineare Verzerrungen
Ein Klirrfaktor wird sowohl bei Verwendung der intensitäts¬
gesteuerten Röhre als auch beim Klystron nicht zu vermeiden sein.Bei der ersteren rührt er einerseits von der nicht genau quadrati-
29

sehen /„-L^-Kennlinie der Impedanzröhre her und anderseits von
der Gitterspannungsabhängigkeit von Cgk. Da die Cgk-Ug-Kenn¬linie bei keiner Röhre genau linear ist, wird hierdurch immer eine
verzerrende Wirkung entstehen.
Beim Klystron wird die Linearität der Strahlstromsteuerungdas Maß für die Größe des Klirrfaktors bilden. Alle diese Ein¬
flüsse sind immer durch geeignete Wahl der Röhre klein zu halten.
g) Zusammenfassung
Die obigen Betrachtungen zeigen somit, daß die im Mittel¬
wellengebiet übliche Impedanzröhrenmodulation im UHF-Gebiet
auf große Hindernisse stößt. Einzig die Verwendung von laufzeit¬
gesteuerten Röhren scheint einen gangbaren Weg für die Lösungdieser Schwierigkeiten zu weisen.
3. KAPITEL
Die mechanischen Modulatoren
Das Problem der Frequenzmodulation eines UHF-Generators
durch Veränderung der Reaktanz des frequenzbestimmendenKreises kann aber auf mechanische Art relativ einfach gelöstwerden.
Bewegt man nämlich die eine Platte des Schwingtopfes durch
irgendeinen äußern Einfluß im Takte der modulierenden Nieder¬
frequenz, so hat dies eine Kapazitätsänderung des Oszillator¬
schwingkreises und damit nach Gleichung (4) eine Frequenzmodu¬lation zur Folge.
Vorteilhaft ist eine Modulation auf dieser Basis vor allem
wegen der sauberen elektrischen Trennung des Modulationsteiles
vom Oszillator. Schwierigkeiten wird vor allem die Trägheit des
Modulators bereiten. Da zur Vermeidung linearer Verzerrungen
grundsätzlich unter der Eigenfrequenz des Modulators gearbeitetwerden muß, wird daraus eine Beschränkung des Niederfrequenz¬bandes resultieren. Die Zahl der Gesprächskanäle pro Träger wird
also nicht beliebig vergrößert werden können.
30

Für die mechanische Modulation stehen grundsätzlich vier
Möglichkeiten offen, das elektrodynamische, das piezoelektrische,das elektrostatische und das elektromagnetische Prinzip.
Der piezoelektrische und der elektrodynamische Modulator
zeigen eine lineare Modulationscharakteristik, der elektrostatische
und der elektromagnetische Modulator dagegen weisen eine qua¬
dratische Modulationscharakteristik auf.
Für die Abklärung der Eignung dieser Modulationssystemesind die folgenden Gesichtspunkte wichtig:
Die Durchbiegung einer Membran oder Platte folgt für Modu¬
lationsfrequenzen /,„ « f„,r annäherungsweise dem Gesetz:
£=£=_^5 in (>jr2
wobei F die auslenkende Kraft, s die Steifigkeit und m die Masse
des schwingenden Systems bedeuten. Da die ResonanzfrequenzF
im allgemeinen gegeben ist, stellt somit der Quotient - ein erstes,
von den mechanischen Eigenschaften abhängiges Kriterium für die
Eignung eines Modulators dar.
Die elektrische Seite des Modulators liefert uns ein zweites
Kriterium. Wächst die zur Erzielung einer bestimmten Auslenkung
notwendige Kraft F, so ist eine entsprechend größere elektrische
Blindleistung aufzuwenden. Damit steigt aber auch die zur Lineari-
. sierung des Frequenzganges notwendige Wirkleistung um das
gleiche Maß. Modulationssysteme mit großer schwingender Masse
erfordern somit große Aussteuerungsleistung des Modulations¬
verstärkers, was für Kleinanlagen natürlich unerwünscht ist.
Die maximal mögliche auslenkende Kraft wird bei den rein
elektrischen Systemen durch die Durchschlagspannung und bei
den magnetisch-elektrischen Systemen durch die Sättigung be¬
grenzt.Am geeignetsten für die mechanische Modulation ist somit
das Prinzip, welches bei minimaler Masse einen möglichst großenF
Quotienten — erreicht.m
FEine grobe Abschätzung zeigt, daß die Quotienten — bei den
31

verschiedenen Systemen nur wenig differieren, wobei das piezo¬elektrische System den günstigsten Wert liefert. Die bei weitem
geringste Masse des schwingenden Systems hat aber der elektro¬
statische Modulator. Die drei übrigen Systeme sind in dieser
Beziehung um Größenordnungen ungünstiger.
Wir haben uns deshalb in der Folge auf die Untersuchung
a) des piezoelektrischen Modulators
b) des elektrostatischen Modulators
beschränkt.
a) Der piezoelektrische Modulator
(Fig. 12)
§1 Der piezoelektrische Effekt [12] [13]
Ein piezoelektrischer Kristall ist ein System, in dem, bei kon¬
stanter Temperatur, je 2 der Größen mechanische Spannung X,elektrische Feldstärke G, elastische Deformation x und elektrische
Polarisation ^3 die beiden andern Größen bestimmen. Nehmen wir
die beiden ersteren als unabhängige Variable, so erhalten wir
nach [12]:%=dX+/.(£ (20)
x = sX+ d<&. (21)
Da uns diese Gleichungen die Beziehungen zwischen den
Vektoren 5ß und © und den Tensoren X und x liefern, erhalten wir
18 Piezomoduln diK, 21 Elastizitätsmoduln siK und 3 Suszeptibili-tätskonstanten x.
Im allgemeinen ist vor allem die Zahl der unabhängigenPiezomoduln, aber auch diejenige der Elastizitätsmoduln, infolgeder Symmetriebedingungen der Kristalle bedeutend kleiner.
Setzt man in der Gleichung (21) X = 0, so erhält man direkt
die Verbindung zwischen den elastischen Deformationen xk und
den elektrischen Feldstärken 6,
xk=dtk% für != !'2'3fi (21a)
k = l,...,o
32

Dieser Vorgang wird als inverser piezoelektrischerEffekt bezeichnet.
Sämtliche piezoelektrischen Kristalle besitzen eine elektrisch
ausgezeichnete Achse, so daß bei Anregung in derselben die mög¬lichen Deformationen am größten werden.
Kristallstäbe
YSilberschichten
Fig. 12. Schematischer Schnitt durch einen piezoelektrischen Modulator.
Bei den piezoelektrischen Deformationen sind zwei Haupt¬typen zu unterscheiden:
a) Die Dehnung.b) Die Scherung.
Bei den Dehnungen wird sich der Kristall entweder in
Richtung der elektrischen, Dickenschwinger, oder in einer der
33

beiden zu ihr senkrechten ausgezeichneten Achsen, Querschwinger,
deformieren. Dehnt sich der Kristall in einer der beiden letzteren
Achsen, so wird die Deformation um den Betrag —- gegenüberAx
derjenigen in Richtung der elektrischen Achse vergrößert.
Dabei bedeutet:
Ae = Fläche senkrecht zur elektrischen Achse,
Ax = Fläche senkrecht zur Deformationsrichtung.
Fig. 13. Scherungsschwinger.
Fig. 14. Transformation des Scherungsschwingers in den Dehnungsschvvinger.
Bei der Scherung treten, bei Anregung in der x-Achse, in
der senkrecht zur x-Achse liegenden Ebene Deformationen in der
2-Richtung auf, deren Größe eine Funktion von y ist. Haltern wir
einen Scherungsschwinger an den Punkten A und B (Figur 13),
34

so wird er sich parallel zur 2-Achse hin und her bewegen, wobei
sich die Deformation linear mit dem Abstand von der Kante AB
vergrößert. Betrachten wir Figur 14, so können wir daraus die
folgenden geometrischen Beziehungen für die Überführung der
Scherungen in Dehnungen ablesen:
A 4 = @ï • du L • cos a
Ala = A 4 • sin a
^= <£,.</«-4--sin 2a.
L 2
Wir erhalten also bei einem 45°-Schnitt die maximale Deh¬
nung von der Größe
X-= «---2-- (22)
Der Scherungsmodul wird somit um den Faktor — verkleinert.
Damit sind die für unsern Zweck geeigneten Möglichkeiten,elektrische Spannungen auf piezoelektrischem Weg in Längen¬änderungen überzuführen, dargelegt.
§ 2 Aufbau des piezoelektrischen Modulators
Für den piezoelektrischen Modulator eignet sich der Quer¬schwinger am besten. Dabei kann es sich um eine reine Deh¬
nungsschwingung oder um eine transformierte Scherungsschwin-gung handeln.
Belegen wir einen piezoelektrischen Stab (Figur 15) auf denzur elektrischen Achse senkrechten Ebenen mit einer leitendenSchicht und legen Spannung an diese Schichten, so wird sich, fallswir den Stab am untern Ende haltern, die Fläche Ax um dea
Betrag
§=dn£-U= dn- U- ~, (23a)
bzw.
S = -£<tu-U-j^, (23b)
bewegen.
35

Schalten wir nun nach Figur 12 mehrere solche Stäbe parallel
und bringen auf ihren Flächen Ax eine Silberschicht an, so er¬
halten wir in Verbindung mit einer festen Qegenplatte einen
variablen Kondensator, der, in einem Schwingtopf eingebaut, einen
mechanischen Modulator ergibt.
x=el- Achse
Fig. 15. Querschwinger.
§ 3 Die Bewegungsgleichung des piezoelektrischen Stabes
Nach Scheibe [13] läßt sich die Differentialgleichung der
Bewegung eines piezoelektrischen Stabes anschreiben als
^+r^+s.i = k.Ume^ = kUn (24)
Fig. 16. Ersatzschema des piezoelektrischen Modulators.
36

Für die Schaltung nach Figur 16 hat Um dabei die Größe:
1nm = e-
i + - d + —)(25)
Dabei wird 3?^, entsprechend dem Ersatzschema von Figur 17:
3o.mK =
1 +y'wCi3fl„(26)
Fig. 17. Ersatzschema des piezoelektrischen Kristalles.
Da für Frequenzen unterhalb der Resonanzfrequenz infolgeder sehr kleinen Rückwirkung
jmCx
ist, wird für
3?k > Ra oder Rt
1Um = £
1 +Ra
Für w « wr können wir die stationäre Lösung der Bewegungsg 1 e i c h u n g damit anschreiben zu :
kI = E
•+D«^c (27)
Setzen wir weiter voraus, daß /?B » /?,-, was mit Hilfe einer
Transformatorschaltung in der Niederfrequenz-Verstärkerröhrerealisiert werden kann, so wird schließlich:
37

£ = E — e'at. (27a)s
Die Größe k geht aus den Bedingungen für den Fall des sta¬
tischen elektrischen Feldes hervor.
Dann gilt für die beiden Typen des Querschw'ingers :
S = -^dilVLl k = s^dti (28)
I =y -fi
d>k H/ k = s — rf,-A . (28a)
§ 4 Diskussion
flj De/- Frequenzhub des Modulators
Es ist grundsätzlich möglich, bei einer bestimmten dispo¬
niblen Modulationsspannung durch Anbringen einer großen Zahl
sehr dünner Kristallstäbe (vgl. Figur 12) die jeweils notwendige
Auslenkung zu erreichen. Die Vergrößerung der Anzahl von Kri¬
stallstäben wird lediglich durch die elektrische und mechanische
Festigkeit des Kristallmaterials einerseits und seine Dielektrizi¬
tätskonstante anderseits begrenzt.Da e bei den meisten Kristallen sehr große Werte annimmt,
wird, bei Parallelschaltung von sehr vielen dünnen Kristallplätt-
chen, die Kapazität C1 sehr groß. Dadurch wird aber, sofern die
Spannung am Modulator über das ganze Frequenzband konstant
gehalten werden soll, eine sehr beträchtliche Ausgangsleistung des
Modulationsverstärkers notwendig.Wir setzen deshalb für die Berechnung des maximalen Fre¬
quenzhubs voraus, daß eine bestimmte M-odulations-
1 e i s t u n g Pmax zur Verfügung stehe.
Nach Gleichung (4) und Figur 12 hat der Frequenzhub den
Wert:
wobei a, das Verhältnis der Gesamtkapazität des Oszillators zu der
für die Modulation ausgenützten darstellt.
38

Lassen wir für die höchste Modulationsfrequenz fmmaJC einen
Abfall des Modulationsgrades auf-j= zu, so wird:
Ri =» 9t ; r~'
und Pmax = ~f'2*' fm""" ' n ' Cl''
wobei n die Anzahl der parallel geschalteten Kristallstäbe angibt.Außerdem gilt: ,
R r
üi — e —
—
.
D n
Mit Hilfe der Gleichungen (27a), (28), (28a) und (29) kann
man den Frequenzhub nun berechnen :
'2 a-b ] e-B-D- n fm
(30)
wobei d im Fall des „reinen Dehnungsschwingers" den Wert
d = du
und im Fall des „transformierten Sdierungsschwingers" den Wert
d = i dikerhält.
Durch die Resonanzbedingungen des Kristallstabes, der an
einem Ende eingespannt am andern Ende frei schwingt, ergibt sich
als weitere Beschränkung:
, _K_\ 1
lmmax \ e*
Darin wird
lr = Resonanzwellenlängee = elastischer Modul
q = spezifische Maße.
So daß schließlich
4
d \I~Y~Dabei ist die Größe -r-1/— die Kenngröße für die Eig-
V« \ e-Q
nung eines K r i s t a 11 e s als Modulator.
39

In der Folge sind in einer Tabelle die Kenngrößen einer
Anzahl bekannter piezoelektrischer Kristalle für Zimmertempera¬tur zusammengestellt.
Seignettesalz KH3P04 NH4H2P04 Quarz
d (V.O 2,5-10"» (V2<46)M0-n ("/,</„) 1.67-10"" (rfu) 2,17-10"»
s 8,86-KT9 1,95 ÎO"10 1,506-lO"10 3,99-10-"
e 3,5 lO"11 1,9 • 10"11 ca. 2-10"11 1,27 10-"
Q ca. 2-10s 2,338 103 ca. 2,33 103 2,65-103
]/7 \ e-g1,636-KT4 4,94-10"6 9,23-10~6 2,55 lO"6
Die Kennwerte der einzelnen Kristalle lassen die erstaunliche
Feststellung zu, daß sich diese in ihrer Eignung für Modulations¬
zwecke nur in relativ kleinem Maße unterscheiden, obschon ihre
Piezomoduln um mehr als 2 Größenordnungen differieren. Den
größten Kennwert hat das Seignettesalz, das sich somit, vom
Standpunkt des Frequenzhubs aus, für die Modulation am besten
eignen würde. Da das Seignettesalz aber seinen oberen Curiepunktbei 24° C hat, fällt es, infolge des bei den nichtlinearen Verzer¬
rungen zu beschreibenden Hysteresiseffektes, außer Betracht.
Als nächstes in der Reihe folgt das Ammoniumphos¬phat.
Ein Schwingtopf mit gleichem Kennwiderstand und gleicher
Resonanzfrequenz wie im oben besprochenen Beispiel (vgl. Seite
27) soll zur Veranschaulichung auf piezoelektrischem Weg modu¬
liert werden.
Beispiel: ft = 200 MHz fmmax= 16 kHz
b = 2,5-10~4 m a = 1,5
Seignettesalz NH4H2P04 KH2P04 Quarz
*ft 40,7 kHz 23,2 kHz 12,3 kHz 6,36 kHz
40

Unser Beispiel zeigt somit, daß auch der Frequenzhub des
piezoelektrischen Modulators relativ kleine Werte ergibt. Immer¬
hin wäre für Frequenzen über 300 MHz, eventuell in Verbindungmit etwas hochohmigeren Schwingtöpfen, eine Verwendung nicht
aussichtslos.
b) Einfluß auf die Stabilität des Oszillators
Die Stabilität des Oszillators kann einzig durch die thermische
Ausdehnung des modulierenden Kristallkörpers und die daraus
resultierende Änderung der Schwingtopfkapazität beeinträchtigtwerden.
Der lineare thermische Ausdehnungskoeffizient, z. B. von
KH2P04) beträgt in der xx- und x2-Richtung und damit auch in
der Längsrichtung des als Modulator schwingenden Stabes:
a = 2,2 • 10"3 m/Grad.
Der Ausdehnungskoeffizient von Aluminium und Messingetragt'"
aju = 2,38 • 10~3 m/Grad
aMessing = 1,84 • 10-3 m|Grad.
Der Ausdehnungskoeffizient hat also ungefähr den gleichenBetrag wie die bisher am häufigsten verwendeten Baustoffe für
Schwingtöpfe. Es besteht zudem die Möglichkeit einer in die
Halterung des Kristalls eingebauten Temperaturkompensation.
c) Verkoppelte Amplitudenmodulation
Es entsteht keine verkoppelte Amplitudenmodulation.
d) Störmodulation
Störmodulation wird nur durch den Vorverstärker erzeugt undfällt deshalb hier außer Betracht.
e) Lineare Verzerrungen
Die linearen Verzerrungen werden unwesentlich, solange mangenügend weit vom Resonanzpunkt der Membran ent¬
fernt arbeitet, und R, oder Ra « ist.10 Cj
41

Für
Ri — —^und Ra > Ri
M Cl
fällt die Auslenkung auf den Betrag—= ab.
s 5
y2
f) Nichtlineare Verzerrungen
Die meisten piezoelektrischen Kristalle zeigen in einem be¬
stimmten Temperaturbereich ein anomales Verhalten. In diesem
Gebiet, das von den beiden „Curiepunkten" eingerahmt wird,treten Hysteresiserscheinungen, analog den ferromagnetischenStoffen, auf.
Da in diesem Fall der piezoelektrische Modul keine Konstante
mehr ist, werden, entsprechend der die Ursache der Hysteresisbildenden, spontanen Polarisation, unter Umständen ganz bedeu¬
tende Klirrfaktoren entstehen. Um dieser Schwierigkeit, die durch
Anbringen einer Vorspannung reduziert werden könnte, zu ent¬
gehen, sollten deshalb Kristalle verwendet werden, die ihren
oberen Curiepunkt unterhalb der Zimmertemperaturhaben.
Die einzigen Verzerrungen, die im Modulator unter allen
Umständen entstehen, betragen nach Gleichung (5):
3_ ACk =
8 Ct'
g) Zusammenfassung
Die obigen Rechnungen zeigen, daß mit den gegenwärtigbekannten piezoelektrischen Kristallen noch kein Modulator für
UHF unter 300 MHz gebaut werden kann. Dies vor allem, weil
die obigen Überlegungen rein theoretischer Natur sind, und für
die Realisierung eines solchen Modulators bedeutende konstruk¬
tive Schwierigkeiten zu überwinden wären, die sicher zu weiteren
Einbußen im Frequenzhub führen müßten.
Grundsätzlich hätte man zwar die Möglichkeit, die nieder¬
frequente Modulationsleistung noch zu steigern. Für die technische
42

Anwendung in Kleinsendern, und für diese ist das System gedacht,wird dies aber kaum in erheblichem Maße möglich sein.
Die Möglichkeit der Anwendung dieses Verfahrens hängt vor
allem von der Auffindung eines piezoelektrischen Kristalles ab,der seine obere Curietemperatur bei 0° C oder etwas tiefer hat.
Betrachten wir nämlich KH2P01, das seinen oberen Curie¬
punkt bei 123° K hat, bei 1500K, so zeigt sich, daß der Piezo-
modul irf36 auf den Wert 1,1 • 10"10 [14] und die Dielektrizitäts¬
konstante er auf den Wert 100 [15] steigen.Damit erhält die Kenngröße eine Erhöhung um ca. 5, und im
oben tabellierten Beispiel würde der Frequenzhub bei 200 MHz
den Betrag von 71,5 kHz erreichen. In diesem Fall wäre somit
die Realisierung des Verfahrens erheblich näher gerückt. Auch
dann wäre aber mit ziemlich erheblichen Schwierigkeiten kon¬
struktiver Natur zu rechnen.
b) Der elektrostatische Modulator
(Fig. 18)
§ 1 Die Bewegungsgleichung der Membran
Die Theorie des elektrostatischen Modulators hat viele Ge¬
sichtspunkte mit derjenigen des elektrostatischen Lautsprechersgemeinsam [16].
Während aber die Auslenkung der Lautsprechermembran mit
— abnehmen muß, um immer gleiche Schalleistung abzustrahlen,
muß die Auslenkung der Modulationsmembran unabhängig von
der Frequenz sein.
Die erste Resonanzfrequenz des Systems muß deshalb beim
Lautsprecher unter das für die Übertragung notwendige Tonfre¬
quenzband gelegt werden.
Beim Modulator dagegen ist es notwendig, die erste Eigen¬resonanz des schwingenden Systems über das Niederfrequenzbanddes Modulators zu legen, um einen günstigen Frequenzgang zu
erzielen.
43

Die Differentialgleichung der Bewegung der Mem¬
bran, die auf einen im Mittelpunkt liegenden Massepunkt reduziert
wurde, lautet:
(32)
Zur Lösung derselben ist es vorerst notwendig, die an¬
greifende Kraft mit Hilfe der elektrischen Feldtheorie zu
berechnen.
Fig. 18. Schematischer Schnitt durch den elektrostatischen Modulator.
A = Hochfrequenzteil. B = Niederfrequenzteil.
Die vom ladungsfreien Feld auf die Materie ausgeübte Kraft¬
dichte im homogenen Dielektrikum wird :
Die auf die Membran wirkende Gesamtkraft hat deshalb die
Form:
F=s-A-U2
(33)
Dabei stellt t den Reduktionsfaktor der Membran auf den
Massepunkt, A die Membranfläche, a den Abstand zwischen Mem¬
bran und Gegenelektrode und ^ die Auslenkung des Membran¬
mittelpunktes dar (vgl. Figur 18).
44

Im Zähler des Ausdrucks (33) erscheint die primär aus¬
lenkende Spannung U, während die im Nenner auftretende Aus¬
lenkung ix eine sekundäre Rückwirkung darstellt.
In der Folge werden diese beiden Elemente der Kraft sepa¬riert.
Zerlegen wir U und ^ in einen festen und einen modulieren¬
den Teil:U= Uo + VLm
(34)h = <?i0 + iim
und setzen für die Kapazität zwischen Membran und Gegen¬elektrode im Ruhezustand:
G = «çr^ = «Q', (35)
wobei x eine von der Durchbiegungsform der Membran abhängigeKonstante darstellt, so wird:
r-Cx{Uo + \XmY
-*«-a.>('-i=^)Lassen wir nur variable Auslenkungen zu, die klein sind
gegenüber dem Abstand a, so wird:
Damit sind wir nun in der Lage, durch Reihenentwicklung desNenners die Kraft in einen primär anregenden Teil und in einen
Rückwirkungsteil zu zerlegen:
N+2Wra+
U^2^+4W^+2U:^]
. (38)2x(a-ft0)r»~""m ~« '
(fl-flo) ^a-h0'
ma-hü\Setzen wir weiter voraus, daß
\VLm\<Uo. (39)
und vernachlässigen die kleinen Glieder zweiter und höherer Ord¬
nung, so erhält F die Gestalt:
F= ivr^j\ \u° +2- + 2Ui/o -^-1• (4°)2z(a —flo)L a — f1()J
45

Zur Berechnung der Modulationsspannung llm
ist es notwendig, die elektrische Differentialgleichung der Mem¬
bran mit Einschluß der äußeren Schaltelemente aufzustellen und
zu lösen.
Fig. 19. Elektrisches Ersatzschema des Modulators.
Schalten wir die Niederfrequenzseite des Modulators auf ein¬
fachste Weise (Figur 19), so resultiert daraus die folgende Diffe¬
rentialgleichung:
rv= 3 Ra+^ dt
+ Udt
(41)
sofern Rp und CK genügend groß gemacht werden.
Mit den Gleichungen (34) und den Exponentialansätzen:
E — Eeiat
(42)
erhält die stationäre Lösung der Differentialgleichung (41) die
Form:
-t- l ttl l -< l I /_ -f-
RaRt îim]Durch Auflösung wird
Uffl =
wobei
f/o • fim • Ri
S. = R.+JX. = Rj-j[±r(l + %)].
(43)
(43a)
46

Die Wechselspannung an der Membran besteht somit
ebenfalls aus einem anregenden Teil und einem Rück-
wirkungstherm, der durch die Bewegung der Membran er¬
zeugt wird.
Durch Einsetzen von itm in Gleichung (40) können wir
schließlich die an der Membran angreifende Kraft anschreiben:
<t(a-fl0)l2 J(üCi-Se ß-*i0 L Sei >
Diese setzt sich also aus einer festen Komponente F0 und
einer variablen Komponente Fm zusammen, wobei das zweite Gliedder variablen Komponente von der Rückwirkung der Membran
herrührt.
Führt man die so berechnete Kraft F in die mechanische Dif¬
ferentialgleichung (32) ein, so erkennt man, daß diese durch die
Vernachlässigungen (37) und (39) linearisiert wurde.
Mit Hilfe von Gleichung (34) und dem Exponentialansatz(42) kann deshalb ihre stationäre Lösung formuliert werden:
— m w2 hm + j wrhm + s hm + se h0 = Fm + F0. (45)Dabei bedeutet se die Eigensteifigkeit der Membran infolge ihrer
mechanischen Vorspannung und s die Gesamtsteifigkeit des
schwingenden Systems, bestehend aus Eigensteifigkeit der Mem¬bran und Steifigkeit des mitschwingenden Luftpolsters.
Durch Trennung der festen und der variablen Komponentekann somit die Bewegungsgleichung der Membran be¬rechnet werden. Für die feste Auslenkung ergibt sich:
_
T Uo* Clo
x • 2 (fl — $i0)Löst man diese quadratische Gleichung auf, so erhält man
als einzig physikalisch möglichen Wert:
,_
* • Uo* G^o y..2ase
'
Die variable Komponente der Auslenkung erfülltdie Gleichung:
47

mai*Çlm+jiurëim+ s h„
Uo-Cx
v. • 2 a • se
Mit der Lösung:
IlOT =
-E+i/o2 • Ci
/, U i Un'1 C\\ . „ n
'
/_ t Uo'1 Ci\ V Rai4W
i/o CiEe'0>t,
wobei $,. durch Gleichung (43a) dargestellt wird, und
(46)
Qae
r W- • d RiX<%
•
t/o2Ci
\2 ioZt%
t/p'Li \
v. 2 a • se I
ï +
t • t/0g • Cl
\ y • 2a- sel
1-*//&
(46 a)
die mechanische Impedanz der Membran mit Einschluß des Ein¬
flusses der äußeren elektrischen Schaltelemente bedeutet.
Die Bewegungsgleichung der auf den Massepunkt
reduzierten Membran erhält damit die Form:
hr Up2 Ci
/. • 2 a Se
t (Jo • Ci
xla_LLWÇilwî.Cl.3*-Sa,y. • 2a • st
Ee3at. (47)
§ 2. Die Durchbiegungsform der Membran
Die Durchbiegungsform der Modulatormembran ist ähnlich
beschaffen wie diejenige des Kondensator-Mikrophons [17, 18],
nur greift in unserm Fall die Kraft lediglich an einem Teil der
Membranfläche an (vgl. Figur 20). Unserer Rechnung liegt das
Verhalten der idealen Membran zugrunde. Dies setzt voraus,
daß die Membran in ihrer ganzen Ausdehnung durch gleiche Zug¬
spannung vorbelastet ist, und daß sie keine Biegesteifigkeitbesitzt. Biegemomente können somit keine auftreten.
48

Für sehr kleine Auslenkungen der Membran erhält man unter
diesen Voraussetzungen den folgenden Verlauf der Spannungs¬komponenten (Figur 21):
Tx « T — az • d
.de
Te= —Tdx'
wobei d die Membrandicke und az die Zugspannung in der Mem¬
bran bedeutet.
Fig. 20. Durchbiegungsgrößen der elektrostatischen Membran.
Fig. 21. Spannungszustand der Membran.
Berechnet man daraus die elastischen Kräfte, die längs eines
Volumenelementes vom Radius x und der Dicke dx angreifen, so
wird2n
F* = f \J{x + dx) — Tx] d<p = 2nTdx
o
2nT\
Die in radialer Richtung wirkende Kraft bleibt also beikleinen Auslenkungen unverändert, während die rückziehendeKraft von der Größe der Auslenkung abhängig ist.
49

Die auslenkende Kraft des elektrischen Feldes beträgt nach
Gleichung (33) :
F — —u% • A
_
«• 2nx- dx
^-T£(ß_^)2- 2(a-!)2^
Durch Formulierung des Gleichgewichtszustandes erhalten
wir damit für die Durchbiegungsform der Membran die
Differentialgleichung:
Eine strenge, allgemein gültige Lösung dieser Differential¬
gleichung ist nicht möglich. Wir werden deshalb eine Näherungs¬
lösung suchen und anschließend diskutieren, wie genau diese für
praktisch interessierende Auslenkungen stimmt.
Für,„_
£ <a (50)
kann der Nenner des zweiten Gliedes in Gleichung (49) in eine
Binomialreihe entwickelt werden. Bricht man diese nach dem
linearen Glied ab, so ergibt sich für die Differentialgleichung (49)
folgende linearisierte Näherung:
f/2£ 1 d£ fIP elP
dx"^ x dx^ a3Tç 2a2 TK '
mit den Randbedingungen (vgl. Figur 20)
x—
x2 : Î = f2
, = 0 :^=0.dx
Da die Differentialgleichung (49) allgemein für eine Kreis¬
ringmembran gültig ist, stellt die Vollkreismembran mit ihrem
verschwindenden Innendurchmesser einen Spezialfall des Kreis¬
rings dar. Daraus geht die Gültigkeit der zweiten Randbedingun¬
gen hervor.
Die Lösung der Differentialgleichung (49a) setzt sich aus
der allgemeinen Lösung der homogenen und einem partikulären
Integral der inhomogenen Lösung zusammen.
50

Die homogene Gleichung ist vom Typus der Bessel'schen
Differentialgleichungen und hat die Lösung [19]:
h = Ci -Jo(yx) + C2N0(yx),
wobei /0 Bessel'sche Funktionen 1. Art und NQ Bessel'sche Funk¬
tionen 2. Art, beide 0. Ordnung, bedeuten.
C1 und C2 sind Integrationskonstanten, und y steht für
-F—
/ £ W
3 y(51)
Das partikuläre Integral der inhomogenen Gleichung be¬
rechnet man mit Hilfe des Ansatzes von Lagrange:
kP =Jo(yx)
e U-
2 a2/
Jo
Myx/JMpÜ^JM^No{yx)dx
No(yx)
dx
h{yx)-Yayrdx
Jo(yx)d[N0(yx)-] dlMyx)-]
und erhält als Lösung:
dx
2a2Ty2
dx
a
N0(yx)
Damit wird die allgemeine Lösung der inhomogenen Glei¬
chung:
S = Ci Myx) + C2 • N0(yx) — -J-
und durch Berechnung der Integrationskonstanten aus den Rand¬
bedingungen:
']2 Uoiyxo) J Jo(yx2)
(52)
Die Größe |2 sowie die Deformation der Membran im Be¬
reich, welcher der anziehenden Kraft des elektrischen Feldes nicht
51

mehr ausgesetzt ist, bestimmt man mit Hilfe der Variations¬
rechnung. Da die äußere Kraft am Rande des betrachteten
Bereichs angreift, wird sich die Membran ihrer Elastizität wegen
so deformieren, daß ihre Ausdehnung ein Minimum wird.
Die Membranfläche
42-f.3 = J 2nxiT+'i^dx
muß also ein Minimum werden.
Nach der Theorie der Variationsrechnung ist hierzu folgende
Bedingung notwendig:
S F A2 F fi2 F r'2 F
ôs exe?*ôfdf
*a?*~
' * '
wobei
F = x VT + |'2 .
Dies führt auf die Bernoulli'sche Differentialgleichung:
F + f'3 + I" * = 0
mit der Lösung:
à,-, = 4= Iln (fCi x + fc^^l + C2)] . (54)yCi
Mit den Randbedingungen
x = xz : | = 0
X = X2 : $22^3 == £i1H_2
und der für kleine Auslenkungen gültigen Vernachlässigung
SP < 1
erhält Gleichung (53) die Form:
£k-3 = *2& In —. (54a)*3
Durch Einsetzen von Gleichung (54a) in (52), für x = x2,
erhalten wir schließlich für die Durchbiegungsform der
Membran:
52

fi —
a My*)
Jo(yx2) + yx2 In -rA(yxz)-V3
(55 a)
ft^3 - ~ l^Ml3) ,n**
. (55b)A(/x2) + yx2ln %A(yx2)
x
Wird der Teil der Membran, an welchem keine anziehenden
Feldkräfte wirken, genügend klein gegenüber der Gesamtfläche,so gilt die vereinfachte Darstellung:
«- = *[#&->] <55d>
Die auf diese Weise berechnete Durchbiegungsform gibt Auf¬
schluß über das Verhalten der Membran im Ruhezustand,d. h. unter der Einwirkung der Vorspannung U0 allein. Sie erlaubt
uns damit die Berechnung der Größen Ct und C1 nach Anlegender Gleichspannung.
Über die Durchbiegungsform im bewegten Zustand
gibt sie aber nur in beschränktem Rahmen Aufschluß, da hierzu
vor allem die Einführung der Trägheitskraft
~2 fi
dF„ = 2xx q d^—-
• dx (56)c11"
notwendig ist.
Für Frequenzen fm « /,„rhat die Trägheitskraft gegenüber der
angreifenden elektrischen Feldkraft und der Rückstellkraft prak¬tisch keinen Einfluß auf die Durchbiegungsform, da sie mit j,n2wächst.
Für /m~ /,„,. dagegen spielen die Trägheitskraft und die Rück¬
stellkraft die Hauptrolle, so daß die Membran sich dann ähnlich
verhält, wie im freischwingenden Zustand, und eine Durch¬
biegungsform vom Typus der Bessel'schen Funktionen annimmt.
Für die Berechnung derselben sei auf die Literatur verwiesen [20].
§ 3 Die Stabilität der Membran
Ziehen wir eine Membran durch Anlegen einer elektrischen
Spannung aus ihrer Ruhelage, so wird sich mit steigender elektri¬
scher Spannung der Abstand zwischen Membran und Gegenelek-
53

trode immer mehr vermindern. Sinkt dieser Abstand bei großen
Spannungen unter einen gewissen Wert, so wächst die anziehende
Kraft des elektrischen Feldes so stark, daß kein stabiler Gleich¬
gewichtszustand mehr möglich ist. Dies führt dann zum soge¬
nannten „Anklatschen" der Membran.
Zur Beurteilung der Gleichgewichtsverhältnisse ist es not¬
wendig, das Koordinatensystem bei der Formulierung der Diffe¬
rentialgleichung (49) etwas zu verlegen (vgl. Figur 20).
Setzen wir als neue Variable:
z = h — f
so wird Gleichung (49)
(Pz_ 1 dz_ eU2
dx2+Y~dx
+(a — li)37?
Der Vergleich zwischen den beiden Differentialgleichungen
(49a) und (49b) läßt allerdings vermuten, daß die beiden Lösun¬
gen nicht identisch sein müssen, obschon sie beide vom Bessel-
schen Typus sind. In Gleichung (49a) wird nämlich die anziehende
Kraft auf den Abstand a bezogen und der entstehende Fehler in
erster Näherung korrigiert. In Gleichung (49b) dagegen wird der
Abstand a — ft als Basis genommen und wieder gleich korrigiert.Die nachfolgende Diskussion der Approximationen wird diese Ver¬
mutung bestätigen.
Die Lösung der Differentialgleichung erhält die Form:
Für x = x3 wird, sofern wir x2 = x3 setzen :
Z3 = Si =~^ [l -A, (j/^-î^.,,)]
Approximieren wir die Besselfunktion durch eine Parabel,so erhalten wir eine Gleichung 3. Grades in fx:
tf-2atf + aHi-~f~=0 (58)
eU2
2(a— h)2T-(49 b)
54

Figur 22 gibt eine Darstellung der Lösung dieser Gleichung.
Der physikalisch realisierbare Teil der Parabel 3. Ordnung er¬
streckt sich von |t = 0 bis |x = a. Die Anordnung ist stabil für
Fig. 22. Durchbiegungscharakteristik des Membranmittelpunktes.
Stabilitätsdiagramm.
In diesem stabilen Teil folgt die kubische Parabel der Glei¬
chung:
* = ¥m cos
1 I ('-=-l:7r — arc cos I
27 U2x3U
3L V16 a3r
Im Grenzpunkt der Stabilität wird
)]
-jund t/: </32ä3T
K 27;t32£'
(59)
(60)
Steigert man die Spannung über diesen Wert, so klatscht die
Membran an die Gegenelektrode.Da somit nur Betriebsspannungen in Frage kommen, welche
ein stabiles Arbeiten des Modulators garantieren, wird |x nie
größer als -=- werden.
Zur Beurteilung der Genauigkeit der Durchbiegungsform (57)
haben wir folglich für fj = -=- eine strenge Lösung der Diffe¬
rentialgleichung (49) zu suchen.
55
Die Differentialgleichung der Durchbiegungsform der Mem¬
bran hatte die Form :
Setzt man
so wird:
x 2(a — £)-7
f = z
x 2z- T
Da bei unserm rotationssymmetrischen Problem die Durch¬
biegungsform eine gerade Funktion sein muß, führen wir eine
Transformation der unabhängigen Variablen durch:
z(x) = u(x") = u(y)
und erhalten damit die umgeformte Differentialgleichung:
y u" 4- u'8Tu2
^-(yu'Y^^Ç. (61)
Führt man für a den Potenzreihenansatz ein:
u = a0 + a\y + a2y2 + + anyn -\
und löst damit die Differentialgleichung (61), so wird:
n m
rrS (n-m)2a„_m 2j avam__v
u = (a~h)+~^j^y ——ü—-f^ y---- (62)
Ein allgemeines Kriterium über die Konvergenz dieser Reihe
konnte nicht gefunden werden, da der Aufbau ihrer Koeffizienten
außerordentlich kompliziert ist.
Man findet dagegen den Grenzwert der Reihe für
ii —y und y = y3 = xr
auf numerischem Weg ziemlich rasch.
56

Die folgende Tabelle gibt uns die Werte von u3 = (a — f3)für den Qrenzpunkt der Stabilität, wobei die Beziehung
sU2_
4a3
87"—
27 xz-
verwendet wurde. Da diese Beziehung von der Berechnung des
Grenzpunkfes der Stabilität auf Grund der parabolischen Durch¬
biegungsform der Membran herrührt, muß auch die Parabel den
zu erwartenden Wert u(x32) =a liefern. Die Abweichungen von
diesem Wert, die man für die genaue Durchbiegungsform nach
Gleichung (62) berechnet, stellt den maximalen Fehler der Appro¬ximation dar. Zur Vervollständigung des Bildes wurde die gleicheBerechnung auch für die Bessel'sche Funktion als Näherungs¬lösung durchgeführt.
Durchbiegungs- Parabel Potenzreihe Besselfunktion Besselfunktionform (Gleichung (49b)) (Gleichung (49a)
u(x32)._a a 0,943 a 0,925 a 0,866 aM
3
Fehler : + 6,1 % 0 -1,8 % - 8,1 %
Alle diese Näherungslösungen sind für unsere Zwecke ge¬
nügend genau besonders deshalb, da sie Maximalwerte dar¬
stellen, die aus Sicherheitsgründen praktisch nie erreicht werden
dürfen. Berücksichtigt man ferner, daß die Voraussetzungen ver¬
schwindender Biegesteifigkeit und absolut ebener Gegenelektrodenie vollständig erfüllt sind, wird die Ungenauigkeit all dieser
Approximationen kaum stark ins Gewicht fallen. Die Lösungen,welche aus Differentialgleichung (49b) hervorgehen, sind offen¬
sichtlich besser als die der Differentialgleichung (49a) ent¬
sprechende Approximation. Da eine explicite Lösung der Diffe¬
rentialgleichung (49b) die Einführung von fj (Gleichung (59))in der Lösung (57) erfordern würde, und dies eine bedeutende
Erschwerung und Verminderung der Übersicht in den folgendenBetrachtungen nach sich ziehen würde, haben wir, trotz der etwas
weniger genauen Approximation, der Lösung (55) den Vorzuggegeben.
57

§ 4 Die reduzierten Membrangrößen
Die Membrangrößen werden mittels der Gleichung
£ = &•/(*) (63)
auf den in der Membranmitte angenommenen, den Weg |t durch¬
laufenden Massepunkt reduziert.
f(x) wurde für fm « fmi, aus der Gleichung (55c) berechnet.
Da diese Größen lediglich zur Vorausberechnung des Frequenz¬hubs benötigt werden, spielt die Vernachlässigung des kraftfreien
Raumes x3 ;> x > x2 keine Rolle. Damit wird
Für /m «=; /m_r wird /(x) nach [20] :
/(je) = /0 (2,4048—). (65)
Die äquivalente Masse folgt aus dem Ansatz für die kineti¬
sche Energie:_, „
A
niaeq = Q•d2n \ x • /2(x)dx. (66)0
Die äquivalente Steifigkeit der Membran allein berechnet sich
aus der Gleichung für die potentielle Energie:
Y^seaeg=T{A§=s-A,=o}= T\\[^ + {fJ~l]xd(Pdx0 0
0
Zur Eigensteifigkeit der Membran addiert sich im bewegtenZustand die Steifigkeit des Luftpolsters sL, welche eine Folge der
Druckänderung 2
Ap=°-^AVist, die bei einer Volumenänderung AV auftritt.
58

Dabei bedeutet c die Schallgeschwindigkeit, ql die spezifischeMasse und V das Volumen des Luftpolsters [21].
Die potentielle Energie wird dann:
Av Av
2
und damit
J^^aeq = \AP d(A V) = \ClJT ' AVd(AV>>
c2 • QLSr =
*3
\2tz \f(x) xdx\. (68)aeq y0
Die Gesamtsteifigkeit des schwingenden Systems setzt sich
schließlich zusammen aus:
Saeq=
Seaeq + S[_aeq .
Die Berechnung der auf den Membranmittelpunkt bezogenenKraft, bzw. des Faktors % in Gleichung (33), erfolgt mittels des
Ansatzes für die Arbeit:
dPe- ÔÇ- dA
ÔW= \va^W*Ôh ' f{x) ' 2nXdx-
0
Setzen wir
Gleichung (49),so wird :
wieder voraus, daß | « a, und brechen, analogdie Binomialreihe nach dem linearen Glied ab,
ÔW 2X2 JCg
ï{J*./(*)<& +2-|j"*./«(*)<&}. (69)0 0âh
XZ
Die Integration der Gleichungen (66, 67, 68, 69) liefert uns
die reduzierten Membrangrößen für die beiden Grenzfälle:
a) fm«fmy.
- = ^||*M[*w-!-«]4W!|i*)59

-TT . "T", y2
y-2
C2 • 0£j 27I.V32 [71(7X3) 1, , .]
1
•Mr-^)
/o(y-K3)L yx3'
[[/o(y*2)]î + [yi(yjc2)]8}-2A (y *2)
y-^2
l-^o(y*3)
wobei ;' den gleichen Wert wie in Ausdruck (51) hat.
b) /,„«/,„,, (nach [20]):
Itlaeq = 0,26946 • 71 X32 • (, d
seaeq = 1,5583- n.T
SL„fn = ~^{n-xfy- 0,1864
(67a)
(68a)
(69 a)
*-aeq~
y
*3
(66b)
(67b)
(68 b)
1,2024*2 h(2,4048-) +— U2(2,4048-) +Jt2(2,4048 j\ (69b)
Zur Illustration des Unterschiedes zwischen den beiden
Durchbiegungsformen sind die äquivalenten Membrangrößen der
Gleichungen (66a -h 69a) für Anklatschspannung mit denjenigen
der Gleichungen (66b -+- 69b) in der nachfolgenden Tabelle ver¬
glichen:
, , Ali 1 ' 32 a3 T
fm<fm,r und U=\21x}
/m ^^ [m, r
Maeq 0,3186 0,2695n ' X32 - q • d
Setaeq
71 -T1,778 1,558
$L, aeq 0,2354 0,1864
cV^2)2
60

Die äquivalenten Membrangrößen werden bei Resonanznähe
langsam aus dem Zustand a in den Zustand b übergehen.Die Berechnung der Kapazitäten Ct und C1, bzw. des Faktors
x, wird durch Integration der Gleichungen (55a, b) durchgeführt,denn:
Xß Xj
Ct = e \,,
, t.dx und Ci = e\
-. dx =J (P + f) J (a — f) a-
71 X22
0'
0
Durch Entwickeln des Nenners und Abbrechen nach dem
linearen Glied erhält man damit wieder in 1. Näherung:
Q=l^Lü!f1 + «.fe_r_
Mr»)_
^| (70)yx2 Jo{yx2) + yx2\nJc^J1(yX2)]
L X3 J ,
s • TT • x22 [ 1 -/i(yx2) . ,
ö |2 yx2[Jo(yx2) + yx2\n^J1(yx2)\j3 /i(yjt2) 1 /t (y x2)
* = h—^V1r ^ v(72)
^o (yx2)+yx2 In — .A (-/ x2) Myx2)+xy2 In —A (y x2)X3 L -*3 J
§ 5 Diskussion
a) Freqmenzhub des Modulators
Der Frequenzhub eines Modulators hat nach Gleichung (4)den Wert:
Af_
1 AC
Mit
[ 2nx 2ne f f f0 £m\ .
0 0
*2
AC=2^\îim-f(x)-x-dx.
61

Daraus berechnet sich, wenn man -- gegen 1 vernachlässigt:
4LU
^A(yx2) l
,, ,
--
—yAi(y*8)$1, yx2
1 •fo(yxs)(73)
wobei f 1/n aus Gleichung (46) einzusetzen ist.
Der Frequenzhub des elektrostatischen Modulators wird
somit hauptsächlich durch die Vorspannung U0, das Verhältnis
U—-
>die Steifigkeit des Systems s und den Plattenabstand der
Uo
Schwingtopfkapazität b bestimmt.
p = 700mmHg-Seule
3
S W'sm
Fig. 23. Durchschlagsspannung ebener Platten.
Paschen'sches Gesetz. Nach [181.
Die maximale Vorspannung U0 ist von der Durchschlagsspan¬
nung einerseits und der „Anklatschspannung" anderseits abhängig.
Die Durchschlagsspannung hat für sehr kleine Schlagweiten den
als Paschen'sches Gesetz bekannten, in Figur 23 dargestellten
Verlauf. Die Anklatschspannung wird nach Gleichung (60) er¬
reicht, sobald
Uo ~t32 a3T
27^*7
Um
U«sollte den Wert 1/5 nicht überschreiten, sofern im Empfänger
ein linearer Diskriminator verwendet wird und der Klirrfaktor
der Übertragung nicht unzulässig anwachsen soll. Der Platten¬
abstand b des Schwingtopfes darf nicht beliebig verkleinert wer-
62

den, da sich der Stempel des Schwingtopfes bei Erwärmung in¬
folge Joule'scher Verluste nicht gleich ausdehnt wie der Mantel.Zu kleiner Plattenabstand hat deshalb bei Belastungsänderunggroße Frequenzschwankungen zur Folge.
Zur Illustration soll ein Schwingtopf von gleichem Kenn¬
widerstand und gleicher Resonanzfrequenz wie im Beispiel der
Impedanzröhre, bzw. des piezoelektrischen Modulators, mecha¬
nisch moduliert werden (vgl. Seite 27 und 40).
Beispiel: /, = 200 MHz
b = 2,5 • 10"4 m
a = 3 • 10~5 m
Membrandicke d — 5 • 10~5 m
Resonanzfrequenz des Membransystems fm,r= 16 kHz
Membranspannung T = 1,5 • 104 —
x2 = x3 = 2,1 • 10~2 m.
Die Anklatschspannung der Membran beträgt für diese Werte :
Ukr = 350 Volt.
Wir wählen deshalb, der Forderungen an die nicht linearen Ver¬
zerrungen wegen
Damit wird:
I/o = 250 Volt
Um = 50 Volt.
4^ = 2,37- 10"4.ft
Bei einer Trägerfrequenz von 200 MHz erhalten wir einen Fre¬
quenzhub:
Af = Al,A kHz.
Vergrößert man die Membrandicke etwas und verkleinert den
Abstand b um einen geringen Betrag, so kann man einen Frequenz¬hub von 80 kHz zweifellos bei genügender Stabilität des Oszil¬lators erreichen. Zudem hat dieses Modulationsprinzip den Vor¬
teil, daß der Frequenzhub mit steigender Trägerfrequenz besser
wird, da -~ frequenzunabhängig ist.
63

Es sei noch darauf hingewiesen, daß der Frequenzhub durch
Verzicht auf die Vorspannung U0 noch wesentlich gesteigert wer¬
den könnte. Es würde dies allerdings auf der Empfängerseite kom¬
plizierend wirken, da ein Diskriminator mit Quadratwurzel-Cha¬rakteristik notwendig würde.
b) Einfluß auf die Stabilität des Oszillators
Nimmt man für den unmodulierten Generator eine Stabilität
von lO"5 an, so soll der Einfluß von Schwankungen der Vorspan¬
nung U0 diesen Wert nicht wesentlich verschlechtern. Da Span¬
nungsschwankungen eines Netzgerätes zur Erzeugung der Vor¬
spannung U0 so langsam vor sich gehen, daß die Luftpolster-
steifigkeit nicht mehr wirksam wird, berechnet sich die hieraus
resultierende Frequenzschwankung :
ïâfA =AUo s_ U^ MJ/1L/,-W UQ se Um \-ft\um
K '
Für obiges Beispiel wird damit:
t/o
V ft lau. Vo6- 10" 3
Läßt man eine Beeinträchtigung der Frequenzkonstanz um
den Faktor 10~6 zu, so verlangt dies eine Spannungskonstanz:
^°= 1,7-KT*.t/o
Bei einem Netzanschlußgerät, das immer gleich belastet wird,
kann eine solche Spannungskonstanz noch gut realisiert werden.
c) Verkoppelte Amplitudenmodulation
Der elektrostatische Modulator erzeugt keine verkoppelte
Amplitudenmodulation.
d) Störmodulation
Störmodulation kann einzig durch den Restbrumm des Vor¬
spannungsnetzgerätes entstehen. Die Störspannung kann aber
64

höchstens so groß wie die maximale Spannungsschwankungwerden.
Deshalb wird:
Af<~
Uo'
U„' Se' K '
In unserm Beispiel wäre somit mit einem Störpegelabstand
Aiàfs
zu rechnen.
>12db
e) Lineare Verzerrungen
Um die linearen Verzerrungen klein zu halten und vor allem
auch die Möglichkeit einer Korrektur derselben mit Hilfe des Vor¬
verstärkers zu haben, muß die erste Resonanzfrequenz der Mem¬
bran über der höchsten Modulationsfrequenz liegen.Da kleine Frequenzänderungen Af direkt proportional der
Auslenkung £t sind, können die linearen Verzerrungen mit Hilfe
der Gleichung (46) diskutiert werden, wobei für gutes Arbeiten
des Modulators die Größe a>2C±- SeSae konstant sein muß.
Für ça « a>, kann Qae durch — angenähert werden, wobei die
relativ kleine elektrische Rückwirkung vernachlässigt wurde.
Wird ««(y,, so erhält 3««> wieder unter Vernachlässigungder elektrischen Rückwirkung, die Form:
3ae=r+j(tom--^Zur Linearisierung des Amplitudenganges in Resonanznähe
ist demgemäß eine große Dämpfung des schwingenden Systemsanzustreben. Wird der Abstand zwischen Membran und Gegen¬elektrode möglichst klein gemacht, und werden zudem „Schikanen"in die Gegenelektrode eingebaut, so wird die Reibung der mit¬
schwingenden Luft vergrößert.
Für Qe unterscheiden wir zwei Fälle:
1a) Ri^Ra
türC
65

ß) Ri < Ra Ri < —^—
iorC
In beiden Fällen wird
und damit
wsC18e-S«e = «(l + ^) (76)
also konstant.
Der zu erwartende Frequenzverlauf von f ist damit auf Qrund
von Gleichung (46) in Figur 24 dargestellt, wobei durch ge¬
eignete Wahl von Ra, bzw. Rt, noch die Möglichkeit einer Lineari¬
sierung bei hohen Frequenzen besteht.
fnw3.
/I
"*\/
v»- -f//?f/t/ss derstnl endenf
\Lufhpolste rstelf gkeit
/
\
j
/\
^y
\
10* 2 3 >f 5 SJBSW* 2 3 * S il 1310* fm
Fig. 24. Amplitudengang des elektrostatischen Modulators.
Beeinflußt wird der nach Figur 24 zu erwartende Frequenz¬
gang noch durch zwei Faktoren:
Einerseits durch die zu erwartende Veränderung der Durch¬
biegungsform der Membran bei Resonanznähe und der daraus
resultierenden Veränderung der reduzierten Steifigkeit und Masse,
anderseits durch den bei tiefen Frequenzen eintretenden Rückgangder Luftpolstersteifigkeit infolge Druckausgleichs auf ein größeresLuftreservoir.
Die Tiefhaltung des letzteren Faktors muß durch konstruktive
Mittel angestrebt werden.
66

f) Nichtlineare Verzerrungen
Diese rühren vor allem von der quadratischen Modulations¬
charakteristik her.
Der dabei entstehende Klirrfaktor erhält auf Grund von Glei¬
chung (38), unter Vernachlässigung der Rückwirkungskomponente,die Größe:
k = lU^ ^j^. (77)
Als weitere Quelle von Verzerrungen wirkt die nichtlineare
Weg-Spannungs-Charakteristik der Durchbiegung.Wir berechnen den Klirrfaktor des Membranelementes x = 0.
Da dieses Element den größten Weg beschreibt, wird der Gesamt-
klirrfaktor sicher kleiner als der so berechnete Wert sein.
Nach Gleichung (59) folgt die Durchbiegungscharakteristikim stabilen Teil dem Gesetz:
à =T (l-COS -3-
(27Uix3earc cos
,, ., _1
V 16 a* T
Wir berechnen den Klirrfaktor für eine Vorspannung,
"\6arTU0 = Utt
27 *32Da
arc cos(2± AA «s ~ + Ax,
^^+2^{ua^2^UaUm + ^m-Ua{
wird
2a** =
3
Der Reduktionsfaktor — rührt von der Verkleinerung der
Auslenkung im bewegten Zustand, infolge Luftpolstersteifig-keit, her.
Mit dem Ansatz für ll,„
l\m = (Jm sin vi t
wird mit Hilfe verschiedener goniometrischer Umformungen:
67

Ii = ^\l — cos{a + 2ßUasmat— ^^-cos2at\\,wobei
7i 27Umx32e ,21x32-eUm-se
« = -*r+
-t^c^f-und ß -
6
'96 a3 T
'48a3 • T-s
Führt man die Jacobi'sche Entwicklung in Reihen von Bessel¬
koeffizienten ein [23] :
oo
sin (z sin©) = S «2«+i-/2«+i(z) sin (2n + 1) 0n = 0
oo
sin(zcos0) = S (-l)"«2«+i-/2«+i(z)cos(2fl+1)0« = 0
oo
cos (z sin 0) = S £2rt-4«(z) cos 2/z 0
n = 0
COS(ZCOS0)= S (-l)"«2«-/2n(z) COS 2/Z 0,n = 0
so erhält man:
li = li0 + lix sin cot+ lî2 cos 2(^ + th sin 3 wf + (78)
= y{[l-cosa.y0(2^f/o)-/o(^)-sin«/2(2/Jt/o)-A(^)+---]+ [2 sin aJt(2ß I/o) J0py^)-2 cos «A(2/? t/o)A (^p) 1 sin tot
-\2smaJ0(2ßU0)-Ji{^)+2cosa.J2(2ßUo)-Jo(^!L) ]cos2w*
-^2sm aJ2(^^ A(2ß U0) + 2 cos a- A(2ß U0)Ji(^~j ]sin3w/
-[2sinay2(2/S^o)-yi(^)-2cosa-yo(2/îf/0).y2(^)+...]cos4c^-r2sin«.y2(^^)y1(2/3t/0)+ • lsin5w^
Die Besselkoeffizienten höherer als 2. Ordnung wurden vernach¬
lässigt, da [2ßU0
0^ ßu^ < 1
sein muß. I 2 )
68

Damit wird der Oesamtklirrfaktor der Anlage für die Vor¬
spannung LJa:
ll21+4>+4+fl4+ •
In unserm Beispiel erhält der Klirrfaktor des Modulators die
Größe:
5% <K<5,7%
sofern wir —Î" = -=- festsetzen.U0 5
Der Klirrfaktor des Modulators kann auf ähnliche Weise für
beliebige Werte von U0 berechnet werden, allerdings unter er¬
heblichem Rechnungsaufwand. Die Messungen haben aber gezeigt,daß der Einfluß des unstabilen Verhaltens des Membran¬
mittelpunktes auf den Oesamtklirrfaktor so gering ist,daß hier auf eine Darstellung dieser sehr langwierigen Rechnungverzichtet wird.
Sollen einem Träger mehrere Gespräche aufmoduliert werden,so ist der Klirrfaktor dieses Modulators immer so groß, daß in
einer Oktave moduliert werden muß, um die sehr scharfen For¬
derungen in bezug auf das Übersprechen zu erfüllen. Aber auch
in diesem Fall ist es notwendig, den Klirrfaktor möglichst klein
zu halten, um das Übersprechen, das seine Ursache in den Nicht-
linearitäten des Empfängers hat, auf das geforderte Maß zu be¬
schränken.
g) Zusammenfassung
Der elektrische Modulator zeigt einen gangbaren Weg zur
Realisierung einer elektrisch stabilen, dämpfungsfreien Modula¬
tion im UHF-Gebiet. Nachteilig ist vor allem der relativ großeModulationsklirrfaktor, der durch Anlegen einer möglichst großenVorspannung reduziert werden muß. Die Verwendung dieses
Modulatortypes empfiehlt sich aber nur für Frequenzen über
200 MHz und Systeme mit einer geringen Anzahl von Qesprächs-kanälen pro Träger.
69

II. TEIL
Konstruktion und Ausmessung eines elektrostatischen
Modulators
Die theoretischen Betrachtungen des ersten Teiles zeigen, daß
der elektrostatische Modulator eine durchaus interessante Lösung
des Problems darstellt, einen Oszillator ohne wesentliche Beein¬
trächtigung seiner Stabilität in der Frequenz zu modulieren. Wir
haben deshalb einen solchen Modulator gebaut und eingehenduntersucht.
4. KAPITEL
Konstruktion des elektrostatischen Modulators
§ 1 Zielsetzung
Bei einer Trägerfrequenz von 200 MHz soll ein elektro¬
statischer Modulator mit einem Niederfrequenzband von 400 bis
16000 Hz gebaut werden, um bei einer UHF, deren Meßtechnik
man noch gut beherrscht, ein Modulationsband zu übertragen, das
die Beschickung sowohl mit einem, als auch mit einer Mehrzahl
von Gesprächskanälen, erlaubt. Die Konstruktion soll ein
Auswechseln der Membran leicht erlauben und ein Ersetzen der
niederfrequenten Gegenelektrode ohne allzu große Schwierig¬keiten gestatten. Vom konstruktiven Standpunkt aus ist das Haupt¬
augenmerk zu richten auf sauber definierte elektrische Verhältnisse
auf der HF-Seite. Auf der Niederfrequenzseite soll möglichst
geringe Kopplung der Membran mit schwingungsfähigen Luft¬
gebilden, sowie möglichst gedämpfte Resonanz des schwingenden
Systems angestrebt werden.
70

§ 2 Die Dimensionierung der Membran
Die Membran als Bindeglied zwischen HF-und NF-Teil
muß zuerst dimensioniert werden. Dabei sind sowohl elektrische
wie mechanische Gesichtspunkte zu beachten.
Die Forderungen mechanischer Art sind:
a) Die Membran soll möglichst geringe Maße haben, um trotz
hoher Resonanzfrequenz minimale Steifigkeit zu erhalten (nach
Gleichung (47)).
b) Die Eigensteifigkeit der Membran soll möglichst großsein. Dies hat vor allem zur Folge, daß die „Anklatschspannung"hohe Werte annimmt (vgl. Gleichung (60)). Außerdem werden
hierdurch, entsprechend Gleichung (74), die Anforderungen an
das Netzanschlußgerät zur Erzeugung der Vorspannung reduziert.
Die Forderungen elektrischer Art lauten:
c) Die Membran soll eine möglichst gute Leitfähigkeit be¬
sitzen, um den Qualitätsfaktor Q des Schwingtopfes möglichst
wenig zu beeinträchtigen.
d) Die Membran darf, entsprechend der Eindringtiefe des
Ultrahochfrequenzstromes, eine gewisse Dicke nicht unter¬
schreiten.
Die Abwägung all dieser Gesichtspunkte gegeneinander er¬
folgt am besten nach den folgenden Grundsätzen:
1. Der Frequenzhub soll möglichst groß sein.
2. Die Resonanzüberhöhung des mechanisch schwingenden
Systems soll möglichst klein sein, um eine Korrektur der linearen
Verzerrungen zu erlauben.
Zur Illustration der Bedeutung unserer 1. Forderung gibt
Figur 25 eine qualitative Darstellung über den Verlauf des Fre¬
quenzhubs bei variablem Abstand a mit der Membrandicke d als
Parameter. Setzt man nämlich in Gleichung (73), bzw. Gleichung
(47), die Anklatschspannung (60) oder die Durchschlagsspannung
(vgl. Figur 23) als die jeweils möglichen Maximalwerte der Vor¬
spannung U0 ein, und setzt voraus, daß U,„ =-=- £/0 und Se « SL,
so verläuft der Frequenzhub entsprechend Figur 25. Die Zug-
71

Spannung o=—, der Membranradius x3, die Resonanzfrequenz
des Systems fm-r und der Plattenabstand b wurden dabei konstant
gehalten.
if
Fig. 25. Qualitative Darstellung des Frequenzhubverlaufs in Funktion des
Plattenabstandes a für verschiedene Membrandicken d.
Aus dieser Darstellung ist zu entnehmen, daß im Bereich der
Anklatschspannung der Frequenzhub mit wachsendem Platten-
abstand a, unabhängig von der Membrandicke, einer Grenz¬
geraden entlang zunimmt. Im Bereich der Durchschlagspan¬
nung nimmt der Frequenzhub rasch ab. Das Maximum der Modu¬
lationstiefe für eine bestimmte Membrandicke erhalten wir somit
dort, wo die Anklatschspannung gleich groß wie die Durchschlag¬
spannung wird. Dieses Maximum wächst mit abnehmender Mem-
brandicke.
Begrenzt wird die Zulässigkeit dieser Darstellung durch zwei
Gesichtspunkte:
a) Die eingespannte Folie muß sich wie eine ideale Membran
verhalten, d. h. die Biegespannungen dürfen gegenüber der Zug¬
spannung vernachlässigt werden. Unter gewissen zulässigen Ver¬
nachlässigungen berechnet sich die Biegespannung der äußersten
Faser für die maximale Auslenkung fx = — :
Ob
E • d • a
3*32(80)
wobei E den Elastizitätsmodul des betreffenden Materials dar¬
stellt.
72

b) Zur Herstellung sehr dünner Folien ist es notwendig, das
Material vor und während des Walzprozesses anzulassen. Dies
hat eine Reduktion der Zugspannung und damit eine Verflachungder Grenzgeraden für dünne Membrane zur Folge.
Die Reduktion der Membrandicke, und damit die Steigerungdes Frequenzhubs, kann nicht beliebig weit getrieben werden,da sonst eine Verschlechterung des Gütefaktors des Schwingtopfesentstehen würde.
Die Membrandicke, die man mit Rücksicht auf die Eindring¬tiefe der elektromagnetischen Wellen vorschreiben muß, wird näm¬
lich durch die Widerstandszunahme, die man in der Membran
gegenüber den übrigen Teilen des Schwingtopfes zulassen will,bestimmt. Für ebene Platten nimmt nach Becker [24] die Strom¬
verteilung, von der Oberfläche aus gerechnet, nach der Charakte¬
ristik
Jc^ke~Tx (81)
ab, wobei x den Abstand von der Oberfläche und
Ô =) na
die „Eindringtiefe" als frequenzabhängige Materialgröße angibt.Nehmen wir den Gesamtstrom als konstant an, so erhalten wir
durch die zur Eindringtiefe vergleichbare Membrandicke ein
Widerstandsverhältnis von
R0
wobei RQ den Widerstand bei beliebiger Plattendicke angibt.Durch Integration erhalten wir
d
le'2n
dx
0
le-2m
--&X dx
0
und damit
R = Ro(l — e-2"T
d=~é-Ai-£)- <82>
73

Für Aluminium und seine Legierungen erhält ô den Wert
ô — 4,38- 10"3 m.
Eine Membrandicke von 24 fi hat damit erst eine Widerstands¬
zunahme von 2 o/o zur Folge.Betrachtet man noch den Einfluß der Faktoren, die in der
Darstellung von Figur 25 konstant gehalten wurden, auf den Fre¬
quenzhub, wobei nur die Membrandicke festgehalten wird, so
zeigt sich:
Eine Steigerung der Zugspannung a hat ein Anwachsen des
Frequenzhubs mit a''- zur Folge, wobei der optimale Platten¬
abstand aopt mit a,/2 abnimmt. Eine Vergrößerung von x3 bewirkt
lediglich eine Vergrößerung von aopt, ohne den Frequenzhub zu
verbessern. Vergrößert man die Resonanzfrequenz /,„,,, so redu¬
ziert sich der Frequenzhub mit /J,, während der Plattenabstand
b den Frequenzhub umgekehrt proportional beeinflußt. Die beiden
letzteren Größen haben keinen Einfluß auf den Plattenabstand aopt.
Die Forderung nach möglichst geringer Resonanzüberhöhung
des schwingenden Systems verlangt, wie auch aus den Unter¬
suchungen über Kondensatormikrophone [18] hervorgeht, einen
möglichst kleinen Plattenabstand a. Der Membrandurchmesser ist
deshalb so klein wie möglich zu halten.
Die Aluminium-Legierung Anticorodal entspricht
unseres Erachtens allen diesen Forderungen am besten. Sie ver¬
bindet gute mechanische Festigkeit mit geringer Masse und relativ
hoher elektrischer Leitfähigkeit.Silber fällt wegen seiner großen spezifischen Masse und
seiner geringen Festigkeit außer Betracht, während Stahl wegen
seiner großen spezifischen Masse, der schlechten elektrischen Leit¬
fähigkeit und der hohen Permeabilitätskonstante nicht in Frage
kommen kann.
Nach den Angaben von Zeerleder [25], hat Anticorodal im
hartgewalzten Zustand eine Zugfestigkeit a02 von
ff0,2 = 27—38 kg/mm2.
Wir haben unsere Berechnungen für Folien mit der Festigkeit
ff0,2 = 30 kg/mm2ausgeführt.
74

Die Membrandicke wurde auf 50 /x dimensioniert, um sicher
noch mit optimaler Zugspannung, rechnen zu können.
Für den durch den Hochfrequenzteil festgelegten Radius x3von 2,5 cm wird dann
aopt = 50 {i.
Die Membranspannung T erhält den Wert
T= 1,53- 104 —
Damit wird nach den Gleichungen (66b h- 69b) für /,„ «=/„,,,
maeq = 7,14 10-5 kg
5, = 7,43 • 104 ~
Die Luftpolstersteifigkeit auf der Hochfrequenzseite wird mit
b =- 300 n
sL „r= 1,74 10"' —
t-aeq, HF'
ni
Um eine Resonanzfrequenz von 16 kHz zu erhalten, muß aber
Saeq — maeq «J2 = 7,17 • 105 —
und damit die Luftpolstertiefe der Niederfrequenzseite:
sl „p= 4,69
• 10-' —'-aeq, NF
'm
betragen. Diese Luftpolstersteife wurde durch das Anbringen von
Löchern in der niederfrequenten Gegenelektrode erzielt. DieLöcher haben nämlich eine Vergrößerung des mitschwingendenLuftvolumens zur Folge.
§ 3 Die Dimensionierung des Niederfrequenzteiles
Die Vorverstärkung der Modulationsspannung wird mit Hilfeeiner als Tetrode geschalteten Telefunkenröhre EF 14 in RC-Schaltung realisiert (vgl. Figur 26).
Das Schema des Netzanschlußgerätes zur Erzeugungder Vorspannung U0 ist ebenfalls in Figur 26 enthalten. Hier
75

Netzanschlussheil
HochfrequenzleilLût
/orspannungsgeräf
Niederfrequenzteil
Fig.
26.Schaltschema
deselektrostatischen Modulators.
or~

wurde eine in der Literatur sehr häufig beschriebene Regelschal¬tung verwendet [26], wobei sich in unserm Fall konstanter Be¬
lastung eine Kombination zwischen Vorwärts- und Rückwärts¬
regelung als besonders geeignet erwiesen hat. Diese Schaltungerlaubt, für einen bestimmten Wert der Ausgangsspannung, die
Schwankungen der Netzspannung vollständig auszuregulieren,während ihre Regelcharakteristik besonders für große Ausgangs¬spannung rasch schlechter wird. Die Ausgangsspannung wurde
von 300—400 Volt regelbar gemacht.
§ 4 Die Dimensionierung des Hochfrequenzteiles
(Figur 26)
Aus konstruktiven Gründen mußte der Oszillator im Eintakt
ausgeführt werden.
Die für unsere Zwecke wichtigste Dimension ist der Platten¬
abstand b. Um großen Frequenzhub zu erhalten, sollte dieser
nämlich so klein wie möglich gemacht werden.
Die Anforderungen an die Frequenzkonstanz des Oszillators
beschränken den Plattenabstand aber aus folgenden Gründen:
Durch die gleichmäßige Erwärmung des Schwingtopfes ent¬
stehen Längenänderungen, und diese haben eine ähnliche Vergröße¬rung desselben zur Folge. Dabei entstehen nach [4] Frequenz¬änderungen von der Größe
é±= a.AT, (83)
It
wobei
a = linearer AusdehnungskoeffizientAT — Temperaturunterschied in ° Celsius.
«
Diese Frequenzschwankungen können aber mit Hilfe einer
Temperaturkompensation, wie sie de Quervain [3] beschreibt, für
einen bestimmten Plattenabstand b beseitigt werden. Wesentlich
nachteiligere Folgen für unsere Konstruktion hat jedoch die Tat¬
sache, daß sich der Schwingtopf im allgemeinen nicht gleichmäßigerwärmt, sondern seine Hauptwärmeproduktion im Stempel er¬
folgt, da der Schwingstrom hier den kleinsten Querschnitt zu pas-
77

sieren hat. Deshalb wird sich der Stempel zuerst stärker defor¬
mieren als der übrige Teil des Schwingtopfes, und dabei eine nicht
kompensierbare Frequenzänderung entstehen, welche von Braun
[4] mit folgendem Wert angegeben wird
Af \ a Pwli2 (84)
ft 6 b Ä-qw
Dabei bedeutet:
pw = gesamte im Innenleiter erzeugte Wärmeleistung
qw = wärmeleitender Querschnitt des Innenleiters
/,• = Länge des Innenleiters
A = Wärmeleitfähigkeit des Innenleitermateriais
a = linearer Ausdehnungskoeffizient.
Diese Formel entspricht allerdings einem oberen Grenzwert.
Es wurde nämlich weder die Ausdehnung des Mantels infolge
Eigenerwärmung noch der Temperaturausgleich zwischen Stempelund Mantel während des Anlaufvorganges berücksichtigt.
Für die weiter unten berechneten Topfdimensionen und -Span¬
nungen wäre für einen Plattenabstand b = 0,3 mm nach Glei¬
chung (84) beim Anlaufen des Oszillators mit einem Wandern der
Frequenz um den Betrag
4^- = M 10 4
U
zu rechnen.
Um während des Betriebs eine Frequenzkonstanz von 10~5
zu erreichen, wäre damit eine Belastungs- bzw. Spannungskonstanzvon .
p...
1^=8,5% bzw. i^=o,7%'t ua
nötig.Dies 'sind relativ geringe Anforderungen an die Spannungs¬
konstanz. Sie liegen aber doch wesentlich über den Werten,
welche, wegen der veränderlichen Röhrengrößen allein, notwendigwären. Infolge von Spannungs- und Belastungsschwankungen ver¬
ändern sich nämlich die dem Schwingtopf parallel geschalteten
Röhrenkapazitäten, was selbstverständlich auch einen Einfluß auf
die Frequenzkonstanz ausübt.
78

Sehr kleine Plattenabstände wirken sich außerdem bei ein¬
seitiger Erwärmung oder Abkühlung des Schwingtopfes sehr un¬
günstig aus. Aus allen diesen Gründen wurde der Schwingtopfmit einem Plattenabstand von
b = 0,30 mm
gebaut.
Die übrigen Daten wurden nach den von Braun [4] ange¬
gebenen Optimumsbedingungen berechnet und ergaben die Werte:
C = 60 pF Di = 4,5 cmL = 10,6 nH Da = 10,2 cm
../TT h = ö-1 cm
Y~c= 13,3-ß
Q = 200°.
Bei der Berechnung des Qualitätsfaktors Q zeigt sich, daß
der Anteil der Membran an den Gesamtverlusten nur 6,7o/0 be¬
trägt, so daß also eine Vergrößerung der Verluste in der Membran
um 2 o/o, die wegen zu geringer Dicke derselben auftritt, eine
Zunahme der Gesamtverluste um weniger als 0,14o/0 zur Folge hat.
Als Oszillatorröhre wurde eine Telefunkentriode LD 1 ge¬
wählt, die sich für Meterwellen noch gut eignet, aber den Nachteil
relativ geringen Innenwiderstandes besitzt. Da uns zur Zeit der
Konstruktion dieses Oszillators keine geeignete Sende-Tetrodeoder -Penthode zur Verfügung stand, mußten wir uns mit diesem
Nachteil abfinden.
Die Röhre wurde mit einer Anodenspannung Ua = 300 Volt
betrieben, und die Rückkopplung auf induktivem Weg realisiert
(vgl. Figur 26). Die Leistung wurde kapazitiv am Gitter ausge¬
koppelt.
§ 5 Der konstruktive Aufbau des Modulators
Figur 27 und 28
Nachdem vorerst ein Modulator mit festem niederfrequen¬tem Plattenabstand a gebaut worden war (Figur 27), wurdein einem späteren Stadium der Untersuchungen ein Laboratoriums¬modell mit variablem Abstand a gebaut (Figur 28), vor
allem zur Untersuchung der Einflüsse des Plattenabstandes aufdie Dämpfung des schwingenden Systems.
79

Beide Modulatoren wurden streng nach dem Gesichtspunkt
der Trennung von Niederfrequenz und Hochfrequenz durch die
Grundplatte gebaut und unterscheiden sich nur in ihrem Nieder¬
frequenzteil.
Fig. 27. Konstruktion des elektrostatischen Modulators.
Legende:
1 = Membran 11 = Akustische Abdichtung
2 =. Schwingtopf-Mantel 12 = Knitterfolie
3 = Schwingtopf-Stempel 13 = Halterung der Knitterfolie
4 = Niederfrequente Gegen¬ 14 = Isolierringe
elektrode 15 = Mutter zur Halterung der
5 = Spannstück für Membran Gegenelektrode
6 = Spannmutter 16 = Grundplatte
7 = Spannring 17 = Glimmerscheibe 0,5 m
8 = Einsatzring 18 = Glimmerscheibe 0,05 mm
9 = Einsatzring 19 = Abschirmblech
10 = Akustische Abdichtung 20 = Akustische Abdichtung.
Um die Nachteile der Eintaktschaltung auf ein Mini¬
mum zu reduzieren, wurde der Schwingtopf 2, 3 *) unter Zwischen¬
lage eines Glimmerringes 17 so auf die Grundplatte 16 gelegt,
daß sich dieseund die Membran 1 in einer Ebene der „Nullebene"
befinden. Die Handempfindlichkeit der Zuleitungen, und damit
*) Die Zahlen bedeuten die Bezeichnung in Figur 27 bzw. 28.
80

Fig. 28. Konstruktion des elektrostatischen Modulators
(Laboratoriumsmodell).
Legende:
1 = Membran 20 = Akustische Abdichtung2 = Schwingtopf-Mantel 21 = Zapfen3 = Schwingtopf-Stempel 22 = Führungsbüchse4 = Niederfrequente Gegen¬ 23 = Druckfeder
elektrode 24 = Platte5 = Spannstück für Membran 25 = Abschlußplatte6 = Spannmutter 26 = Stellschraube7 = Spannring 27 = Hebelsystem8 = Einsatzring 28 = Bolzen9 = Einsatzring 29 = Antrieb
10 = Akustische Abdichtung 30 = Skala11 = Akustische Abdichtung 31 = Kontaktbolzen.
81

der Leistungsverlust auf denselben konnte so weitgehend ver¬
mieden werden.
Da es sich in unserm Fall um die grundsatzliche Untersuchung
des Modulatorteiles handelte, wurde der Schwingtopf nicht ab¬
stimmbar ausgeführt. Eine Einrichtung fur die Abstimmung ließe
sich aber auf einfache Art in die vorliegende Konstruktion ein¬
bauen.
Fig 29 Elektrostatischer Modulator mit Netzanschluß- und Vorspannungs-
gerat
Die Membran wurde mit Hilfe von Schikanen im Topf ge¬
haltert und vorgespannt. Durch die Mutter 6, die den Ring 7 nach
unten drückt, erhalt sie ihre endgültige Spannung, die zudem mit
Hilfe der beiden Ringe 8 und 9 einstellbar ist.
Der Hohlraum des Hochfrequenzoszillators wurde vorerst
durch den punktiert eingezeichneten Trolitulring 10 akustisch ab¬
geschlossen, um so ein Mitschwingen dieser Luftmassen zu ver¬
hindern. Außerdem wurden die kleinen Lufträume, die direkt an
die Membran' anschließen, mit Trolitulringen 11 und 20 abge¬
schlossen, um die Luftpolstersteifigkeit über den ganzen Frequenz¬
bereich besser konstant zu halten.
Beim ersten Modulator wurde die niederfrequente Gegen¬
elektrode 4 mit Hilfe einer Mutter 15 und zwei Isolierstücken aus
Hartgummi 14 im Modulator befestigt. Zur Vermeidung von Mem¬
brandeformationen infolge Luftdruckschwankungen auf der einen
Seite der Membran wurde, mit Hilfe einer Knitterfolie 12, der
Außendruck in den Innenraum übertragen und dieser trotzdem
staubfrei gehalten. Der ganze Niederfrequenzteil wurde mit Hilfe
des Blechs 19 elektrostatisch abgeschirmt.
82

Bei der zweiten Ausführung wurde die auswechselbare
Gegenelektrode 4 im Zapfen 21 eingeschraubt. Der Zapfen wurde
in einer isolierten Büchse 22 geführt und von drei Federn 23
über die Platte 24 von der Membran weggedrückt. Von der Ab¬
schlußplatte 25 wird über die Stellschraube 26 und das Hebel¬
system 27 der im Zapfen isoliert eingeschraubte Bolzen 28 gegen
die Membran gedrückt. Es gelang mit dieser Konstruktion, den
Plattenabstand a mit Hilfe des Knopfes 29 und der Skala 30
mit einer Genauigkeit von 2 fi einzustellen.
a) Ansicht von der Seite. b) Ansicht von unten.
c) Einzelteile. (Die Nummern entsprechen der Legende von Fig. 28.)
Fig. 30. Elekt^statischer Modulator (Labormodell).
'"83

Die Zuführung der Vorspannung und der Modulationsspan¬
nung erfolgt durch konzentrisches Kabel über den Bolzen 31 auf
die Platte 24.
Figur 29 und 30 zeigen Lichtbilder der Apparatur als Ganzes
und in ihre Einzelteile zerlegt.
5. KAPITEL
Messungen am elektrostatischen Modulator
§ 1 Meßmethoden und Meßapparatur
Die Messung des Frequenzhubs sowie der linearen und
nichtlinearen Verzerrungen wurde durch Demodulation des
frequenzmodulierten Signals ausgeführt. Als Empfänger wurde
hierbei ein Überlagerungsempfänger konventioneller Bauart mit
Amplitudenbegrenzer und Bandfilterdiskriminator verwendet. Der
Empfänger wurde statisch geeicht, da uns kein frequenzmodu¬
lierter Meßsender zur Verfügung stand. Die niederfrequente Aus¬
gangsspannung wurde mit Hilfe eines Diodenvoltmeters ge¬
messen.
Die Kontrolle des Klirrfaktors erfolgte nach der De¬
modulation mittels eines „Wave Analyzers". Dies gestattete uns,
die besonders wichtige zweite Harmonische genau zu messen.
Die Störmodulation war so gering, daß sie im Emp¬
fänger nicht festgestellt werden konnte. Sie wurde deshalb direkt
am Netzanschlußgerät durch einen Kathodenstrahloszillograph
gemessen, wobei der K. O. durch eine genau bekannte 50 Hz-Span¬
nung geeicht wurde. Der Einfluß auf die Stabilität wurde
durch Messung der Spannungskonstanz des Netzanschlußgerätes
festgestellt. Zur Erzeugung der Gegenspannung wurden Batte¬
rien verwendet und als Indikatorinstrument ein Röhren-Voltmeter
benützt.
Während alle diese Messungen auf mindestens 5 o/o genau
ausgeführt werden konnten, gestaltete sich die Messung der
Plattenabstände a und b bedeutend schwieriger. Der hoch¬
frequente Plattenabstand b wurde mit Hilfe von Schublehre und
84

Tiefenmaß auf bestenfalls 10 o/o genau bestimmt. Der nieder¬
frequente Plattenabstand a wurde indirekt aus der Kapazität zwi¬
schen Platte und Membran gemessen. Bei großem Abstand wirkte
sich dabei die Schaltkapazität als Fehlerquelle aus. Sehr kleine
Abstände können überhaupt nicht mehr genau definiert werden,da die Unebenheit der Plattenoberfläche in der Größenordnungvon 5-^10 ju liegt. Auch hier wird der Fehler deshalb immer über
5o/o liegen und für Werte unter 10 fi schnell anwachsen.
Die elastische Spannung T der Membran wurde durch
Messung der Frequenzänderung des Oszillators bei Anlegen der
elektrischen Vorspannung gemessen. Aus den Gleichungen (4) und
(70) läßt sich für T die Beziehung
ableiten. Der Fehler dieser Messung ist vor allem von der Ge¬
nauigkeit der Bestimmung der Plattenabstände a und b abhängig.
§ 2 Meßresultate
a) Elastische Spannung der Membran
Für die elastische Spannung der Membran wurde
T= 2,08- 10* —
gemessen.
Dies entspricht einer Zugspannung von
a— 4,16 • 108 — = 40,6 kg/mm2.
Da für die verwendete Anticorodalfolie eine Streckgrenze von
36 kg/mm2 und eine Bruchgrenze
Ob = 38 kg/mm3
angegeben wurde, ist der gemessene Wert sicher etwas höher
als der tatsächliche.
Wir haben in der Folge mit einer Zugspannung
a = 35 kg/mm2 ; bzw. T = 1,80 —
gerechnet.
85
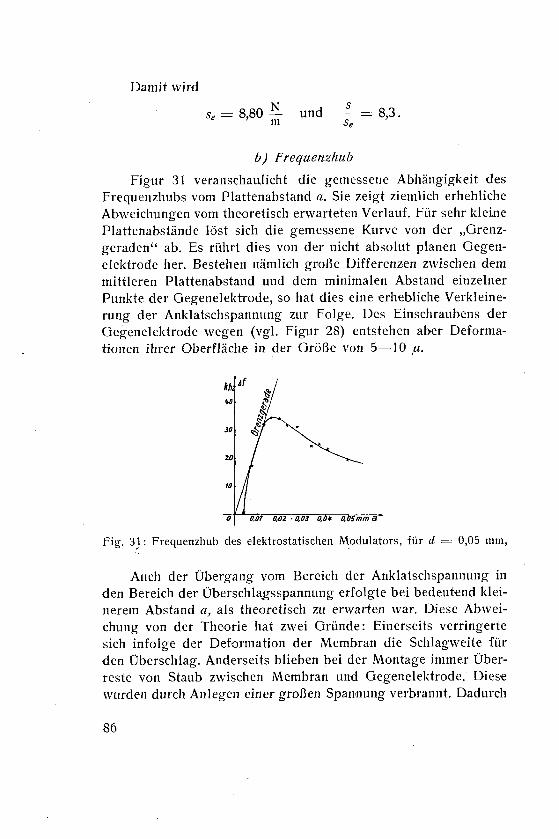
Damit wird
s, = 8,80— und —=8,3.
b) Frequenzhub
Figur 31 veranschaulicht die gemessene Abhängigkeit des
Frequenzhubs vom Plattenabstand a. Sie zeigt ziemlich erhebliche
Abweichungen vom theoretisch erwarteten Verlauf. Für sehr kleine
Plattenabstände löst sich die gemessene Kurve von der „Grenz¬
geraden" ab. Es rührt dies von der nicht absolut planen Gegen¬
elektrode her. Bestehen nämlich große Differenzen zwischen dem
mittleren Plattenabstand und dem minimalen Abstand einzelner
Punkte der Gegenelektrode, so hat dies eine erhebliche Verkleine¬
rung der Anklatschspannung zur Folge. Des Einschraubens der
Gegenelektrode wegen (vgl. Figur 28) entstehen aber Deforma¬
tionen ihrer Oberfläche in der Größe von 5—10 ju.
o aar o,02 0.03 0,0* 0,0smm a'
Fig. 31: Frequenzhub des elektrostatischen Modulators, für d = 0,05 mm,
Auch der Übergang vom Bereich der Anklatschspannung in
den Bereich der Überschlagsspannung erfolgte bei bedeutend klei¬
nerem Abstand a, als theoretisch zu erwarten war. Diese Abwei¬
chung von der Theorie hat zwei Gründe: Einerseits verringerte
sich infolge der Deformation der Membran die Schlagweite für
den Überschlag. Anderseits blieben bei der Montage immer Über¬
reste von Staub zwischen Membran und Gegenelektrode. Diese
wurden durch Anlegen einer großen Spannung verbrannt. Dadurch
86

entstanden aber auf der Membran Ansatzstellen, die später den
Durchschlag begünstigten.Die Kurve 31 wurde mit Vorspannungen aufgenommen, die
jeweils 30 o/o kleiner als die Anklatschspannung, bzw. Durch-
schlagsspannung, waren.
Gegenüber den nach Gleichung (73) berechneten Werten des
Frequenzhubs ließ sich eine Abweichung von —10 o/o feststellen.
Diese Differenz rührt wieder von der ungenauen Bestimmung der
Plattenabstände a und b her.
c) Einfluß auf die Stabilität des Oszillators
Figur 32 stellt den Verlauf der Spannungskonstanz des Netz¬
anschlußgerätes in Abhängigkeit von der Ausgangsspannung dar.
Die gemessenen Werte beziehen sich auf Schwankungen der Netz¬
spannung um ^ 2,5 o/o.
Die Spannungsschwankungen konnten nicht vollständig aus¬
geregelt werden, da zu diesem Zwecke die Heizung der Regelröhredurch Verwendung einer Batterie-Heizung oder eines Eisenwasser¬
stoffwiderstandes von der Netzspannung unabhängig gemachtwerden müßte.
'"Ar9 ft
300 320 UO 360 3B0 <fOOU
Fig. 32. Beeinflussung der Oszillatorstabilität durch den Modulationsteil
für Schwankungen der Netzspannung um -j- 2,5 o/o.
Für unsere Zwecke genügt aber die realisierte Stabilität voll¬
ständig. Die Beeinflussung der Frequenzkonstanz beschränkte sich
nämlich für unser Beispiel auf:
4^ = 7. 10-.Jt
87

d) Störmodulation.
Figur 33 veranschaulicht den Störpegelabstand des
Modulators in Funktion der eingestellten Vorspannung. Dieser
war so groß, daß keine Beeinträchtigung der Übertragungsqualitätwahrnehmbar war.
db100
so
so
70
so
so
»0
30
10
'Jst
300 310 3W 3S0 ISO hOO U0
Fig. 33. Störpegelabstand des elektrostatischen Modulators
(K=5%)....
Um 1
fur77ô=
T
Es konnte auch kein Mikrophoneffekt festgestellt wer¬
den, sofern die Apparatur auf Gummifüßen gelagert wurde. Stellte
man den Modulator ohne Gummifüße direkt auf den Tisch, so war
der Mikrophoneffekt trotzdem sehr, gering.
e) Lineare Verzerrungen
Die Reduktion der linearen Verzerrungen auf ein Minimum
ist nicht ohne Schwierigkeiten zu erreichen. Es ist vor allem auf
saubere akustische Abdichtung des Schwingtopfes zu achten, um
so ein Mitschwingen seiner Luftmassen zu vermeiden.
Wichtig ist ferner die Ausfüllung der an die Platten angren¬
zenden Hohlräume mit Isolationsmaterial.
Zur Vermeidung von störenden mechanischen Resonanzen
muß die Wandstärke des Schwingtopfes genügend groß dimen¬
sioniert werden.
Möglichst große Dämpfung des schwingenden Systems muß
durch Verkleinerung des Plattenabstandes a angestrebt werden.
Figur 34 zeigt den Frequenzgang des Modulators, wie er für
drei verschiedene Plattenabstände a gemessen wurde. Am auf-

fallendsten ist die sehr erhebliche Vergrößerung der Dämp¬fung des schwingenden Systems bei Reduktion des P latte n-
abstandes a. Die Verzerrungen bei 6,5 kHz, bzw. 13 kHz,rühren von der Radialbewegung der Luft her. Infolge der Durch¬
biegung der Membran entstand nämlich bei der Modulation ein in
radialer Richtung wirkender Gradient der Luftbewegung.2 je«
Für die Resonanzwellenlängen ). = —- (n = 1, 2, 3 ...) gaben
diese radialschwingenden Luftmassen Anlaß zu linearen Verzer¬
rungen.
Die ganz ausgezogene Kurve (a = 0,0175 mm) in Figur 34
zeigt, daß der Frequenzhub eines solchen Modulators ohne jedeelektrische Korrektur von 150 bis 26000 Hz nur um + 1,3 db
schwankt.
Fig. 34. Frequenzgang des elektrostatischen Modulators
für Ua = 0,7 UKr, Um = \ U0.
f) Nichtlineare Verzerrungen
Die Messung des Klirrfaktors in Abhängigkeit vom Verhältniszwischen Modulations- und Vorspannung ergab weitgehendeÜbereinstimmung mit dem theoretisch erwarteten Resultat (vgl.Figur 35).

0 ' 0.1 0.2 0.3 OJt 0.5 0.6 OJ 0.8 Q3 IJ3
Fig. 35. Klirrfaktor des elektrostatischen Modulators
für a = 0,02 mm, U0 = 280 V, fm = 1 kHz.
Dagegen konnte eine Vergrößerung des Klirrfaktors für Vor¬
spannungen in der Größe der Anklatschspannung nicht beobachtet
werden. Dies läßt den Schluß zu, daß nur die (/-^-Charakteristik
des Mittelpunktes starke nichtlineare Verzerrungen aufweist,
während die übrigen Teile der Membran eine wesentlich günsti¬
gere Auslenkungscharakteristik besitzen. Dadurch wird, bei Be¬
trachtung der ganzen Membran, die Vergrößerung des Klirrfaktors
unbedeutend.
§ 3 Diskussion
Auf Grund der oben beschriebenen Meßresultate läßt sich nun
die Verwendbarkeit solcher Modulatoren für Trägerfrequenzen
ft ^ 200 MHz gut beurteilen:
Für die Übertragung eines Gesprächskanals (300 -*-
3000 Hz) eignet sich der elektrostatische Modulator sehr gut,
da hiefür ein Frequenzhub von 15 kHz genügt.
Für die Übertragung von zwei Gesprächskanälen in
einer Oktave (7000 -4- 14000 Hz) ist nach den amerikanischen
Normen ein Frequenzhub von 70 kHz notwendig. Durch Reduk¬
tion der höchsten M'odulationsfrequenz von 26 kHz auf 14 kHz
ist eine Verkleinerung der Steifigkeit s und damit eine Vergröße¬
rung des Frequenzhubs um den Faktor 3,45 möglich.Damit wird
Af = 86 kHz.
90

Da in einer Oktave moduliert wird, ist der Klirrfaktor von
5 o/o zulässig.Der elektrostatische Modulator eignet sich somit für die
Übertragung von maximal zwei Gesprächskanälen und beanspruchthierzu eine Bandbreite von maximal ^ 100 kHz.
Die Übertragung von Musik, entsprechend den amerikani¬
schen Normen, kann nur für Trägerfrequenzen ft > 300 MHz in
Frage kommen, da sonst ein Frequenzhub von 75 kHz bei einem
Klirrfaktor K < 2 o/0 und guter Stabilität des Oszillators nicht
realisiert werden könnte.
91

Zusammenfassung
Die Verwendung der Frequenzmodulation für drahtlose Über¬
tragungen im UHF-Gebiet hat sich in den letzten zehn Jahren
mehr und mehr durchgesetzt.Die direkte Modulation von Trägerfrequenzen über 100 MHz
hat sich aber als sehr schwierig erwiesen.
Die vorliegende Arbeit untersucht Möglichkeiten zur direkten
Modulation der Frequenz von Oszillatoren im Gebiet von 100 bis
600 MHz, vor allem im Hinblick auf die Verwendung des Schwing¬
topfes als frequenzbestimmendes Element.
Vorerst werden die bekannten Vorteile der Frequenzmodula¬
tion gegenüber der Amplitudenmodulation dargelegt. Hierauf wird
die Verwendung von Impedanzröhren zur Modulation von Ultra¬
hochfrequenzen untersucht. Es zeigt sich dabei, daß einzig die
Verwendung von Laufzeitröhren eine zweckmäßige Lösung des
Problems erlaubt.
In der Folge wird gezeigt, daß die Verhältnisse bei mechani¬
scher Modulation der Schwingtöpfe günstiger liegen, wobei be¬
sonders das Prinzip des elektrostatischen Modulators eingehend
studiert wird.
Eine Lösung des Problems mit Hilfe piezoelektrischer Modu¬
lation des Schwingtopfes wird angedeutet.Im zweiten Teil wird der Aufbau eines elektrostatischen
Modulators beschrieben.
Die Messungen an diesem Modulator zeigen in Übereinstim¬
mung mit der Theorie, daß er sich für die Übertragung von höch¬
stens zwei Gesprächskanälen in einer Oktave gut eignet. Die maxi¬
mal ausnützbare Bandbreite pro Träger beträgt dabei ^100 kHz.
92

Die vorliegende Arbeit entstand in den Jahren 1944—1946
am Institut für Hochfrequenztechnik an der E. T. H.
Meinem sehr verehrten Lehrer,
*
Herrn Prof. Dr. F. TANK,
möchte ich für die Anregung dazu und die wertvollen Ratschlägebei der Durchführung herzlich danken.
Der Aluminium Industrie AG. Chippis und dem Leiter ihrer
Forschungsabteilung, Herrn Prof. Dr. v. Zeerleder, bin ich für
das freundliche Entgegenkommen bei der Beschaffung von Anti-
corodalfolien zu Dank verpflichtet.
Der Aluminiumfonds Neuhausen unterstützte die Durch¬
führung der Arbeit durch seine Mittel, wofür ihm aufrichtig ge¬
dankt sei.
93

Literaturverzeichnis
1 Kolster, F A,Generation and Utilisation of Ultra-Short Waves in Radio
Communication Proc I R E 25/12, 1937
2 Sckupbach, R, Studien über die Technik der Ultrakurzwellen im Be¬
reiche von 1 Meter Wellenlange Diss E T H 1942
3 de Quervain, A,Elektrische Schwingtopfe und ihre Anwendung in der
Ultrakurzwellen-Verstarkertechnik Diss E T H 1944
4 Braun, A ,Der frequenzstabile Schwingtopfgenerator Diss E.T H 1946
5 Armstrong, E H, A Methode of Reducing Disturbances in Radio Signa¬
ling By a System of Frequency Modulation Proc IRE 24 5,
1936
6 Crosby, M G, Frequency Modulation Noise Characteristics Proc
I R E 25/4, 1937
7 Vellat, T, Der Empfang frequenzmodulierter Wellen E N. T 18'4,
1941
8 Kleen, W, Entwicklungsstand der UKW-Rohren-Technik Telefunken-
Mitt Nr 84, Sept 1940
9 Vartan, R H and S F,A High Frequency Oscillator and Amplifier
Journ of appl Physics 10/7, 1939
10 Webster, D L, Cathode Ray Bunching Journ. of applied Physics 10/7,
1939
11 Sigrist, W , Verstarkerprobleme dei Ultrakurzwellen Bull S E V 37'1,
1946
12 Voigt, W, Lehrbuch der Kristallphysik Taubner, Leipzig 1928
13 Scheibe, A,
Piezoelektrizität des Quarzes Steinkopf, Dresden 1938
14 v Arx, A und Battue, W, Der inverse Piezoeffekt des Seignette-elek-tnschen Kristalls KH2P04 H P A 17, 1944, S 298
15 Busch, G, Neue Seignette-EIektnka H P A 11, 1938, S 269
16 Riegger, R,Zur Theorie des Lautsprechers Wiss Ver aus dem Sie¬
mens Konzern 3/2, 1924
17 Wente, E C, A Condenser Transmitter as a Uniformly Sensitive In¬
strument for The Absolute Measurement of Sound Intensity PhysicalRev 10/1, 1917
18 Weymann, G, Die Messung kleinster Schalldrucke mit dem Konden¬
satormikrophon E N T 20/6, 1943
19 Kamke, E, Differentialgleichungen Becker & Erler, Leipzig 1943
94

20. Waetzmann, E., Technische Akustik, 1. Teil. Handbuch der Exp.-Physik,Bd. 17, 2. Teil. Akad. Verlagsgesellschaft, Leipzig 1934.
21. Rayleigh, Lord, Die Theorie des Schalles. Vieweg & Sohn, Braunschweig1879.
22. Seeliger, R. und Mierdel, G., Selbständige Entladung in Gasen. Hand¬
buch der Exp.-Physik, Bd. 13, 3. Teil. Akad. Verlagsgesellschaft,Leipzig 1929.
23. Watson, G. N., A Treatise on the Theory of Bessel Functions. Cam¬
bridge, University Press, 1944.
24. Becker, R., Theorie der Elektrizität, Bd. 1, 10. Auflage. B. O. Täubner,
Leipzig-Berlin.25. von Zeerleder, A., Technologie des Aluminiums und seiner Leichtlegie¬
rungen. Akad. Verlagsgesellschaft, Leipzig 1943.
26. Lindenhovius, H. J'. und Rinia, H., Ein Netzanschlußgerät mit stabili¬
sierter Spannung. Philips Techn. Rundschau 6/2, 1941.
Q5

Curriculum vitae
Geburtsdatum: 8. Februar 1918.
Bürgerort: Winterthur.
Bildungsgang: 5 Jahre Primarschule Neuhausen, 2 JahreSekundärschule Neuhausen, 5i/z Jahre Kantonsschule Schaffhausen
mit Maturitätsabschluß, 8 Semester Studium.an der Abteilung für
Elektrotechnik an der E. T. H. mit Diplomabschluß im Dezember
1942.
Meine Studien wurden während zwei Jahren wegen Militär¬
dienst und Werkstattpraxis in der Brown Boveri & Cie., A.-G.
unterbrochen.
Seit dem Januar 1943 war ich als Assistent von Herrn Prof.
Dr. F. Tank am Institut für Hochfrequenztechnik tätig. Im Laufe
des Jahres 1944 begann ich mit der Arbeit an meiner Dissertation
und widmete mich seit April 1945, unter Verzicht auf die Assi¬
stentenstelle, ausschließlich der vorliegenden Promotionsarbeit.












![Untitled-2 [ashadeepgroup.com] · Builders by JDA vide no. 21677 dated 28/11/2013, Development of project shall be carried out by "Regalia Builders" , as per the approved maps Of](https://static.fdocuments.us/doc/165x107/5f507ec9c7e50a08e3426822/untitled-2-builders-by-jda-vide-no-21677-dated-28112013-development-of-project.jpg)





