Image segmentation by clustering in the color space CIS581 Final Project Student: Qifang Xu Advisor:...
22
Image segmentation by clustering in the color space CIS581 Final Project Student: Qifang Xu Advisor: Dr. Longin Jan Latec ki
-
Upload
jessie-holmes -
Category
Documents
-
view
217 -
download
2
Transcript of Image segmentation by clustering in the color space CIS581 Final Project Student: Qifang Xu Advisor:...

Image segmentation by clustering in the
color space
CIS581 Final Project
Student: Qifang Xu
Advisor: Dr. Longin Jan Latecki

Content Introduction
Project Algorithm
Project program
Experiments and results
Conclusion

Introduction Image segmentation is to find objects or
meaningful part of objects. Two types of segmentation methods
homogeneity
contrast
Image segmentation techniques region growing and shrinking
clustering methods
Boundary detection

Clustering Techniques
Segment an image by grouping each elements based on some measure of similarity
Domain spaces spatial domain (row-column (rc) space)
color space
histogram spaces
other complex feature space
Clustering Algorithms Basic idea
1. Iteratively divide the space of interest into regions by median.
2. stop when the specific criteria is reached.
k-means clustering Recursive region splitting algorithm
standard technique
1. compute histograms for each component of interest (red, green, blue)
2. select a best threshold to split the image into two regions
3. Repeat 1 and 2, until no new regions can be created

Project Algorithm
A combination of the k-medoid algorithm and classification tree’s techniques
Feature space: RGB Computation time is linear to the number of f
eature vectors Flow chart for the project

Project program (1)
Main file: rgbcluster.m
firstauto3(inputFileName, mnp, percent)
inputFileName: image for segmentation
mnp: Minimal number of points in each cluster
percent: parameter that delays clustering of points in a margin region. Value: 0.01-- 0.1. Normal value: 0.05.
output: a set of clusters

Project program (2)
Color indexeach entry: R G B weightsweight is the number of pixels for this color
function [colorWeights] = getStat(data, map) colorWeights = map; [row, col] = size(map); for i = 1:row tmp = find(data==i); colorWeights(i, col+1) = length(tmp); end return;

Project program (3)
Means
meanR =
meanG =
meanB =
N
weightsr *
N
weightsg *
N
weightsb *

Codes for find rgb mean
function [mn] = find_mean(data)[row, col] = size(data);sumR = 0;sumG = 0;sumB = 0;count = 0;for i = 1:row
sumR = sumR + data(i, 1) * data(i, col); sumG = sumG + data(i, 2) * data(i, col); sumB = sumB + data(i, 3) * data(i, col); count = count + data(i, col);
endthisMean(1) = sumR / count;thisMean(2) = sumG / count;thisMean(3) = sumB / count;mn = thisMean;
return;

Project program (4)
Distance: Euclidean distance between two points
Codesfunction [dist] = dist2pt(x, y)
dist = sqrt((x(1)-y(1))^2 + (x(2)-y(2))^2 + (x(3)-y(3))^2);
return;

Project program (5)
Split2.m (provided by Dr. Latecki)
[lmainindex,rmainindex,ldata,ldist,rdata,rdist,cluster,no,centroid] = split2(data,dist,a,mainindex,scale,mnp,percentage,cluster,no,centroid)

Project program (6)
recurauto1.m: recursively split data into clusters (provided by Dr. Latecki)
1. distance histogram (myhist)
2. threshold (evo2)
3. split (split2)
4. find left distance, go to left branch
5. find right distance, go to right branch
6. no new split, stop
Unclustered points
assigned to the clusters with closest distance to the centroids.
Experiments and results
Rgb pictures Cherry flowers
House
tiger
airplane
car
people
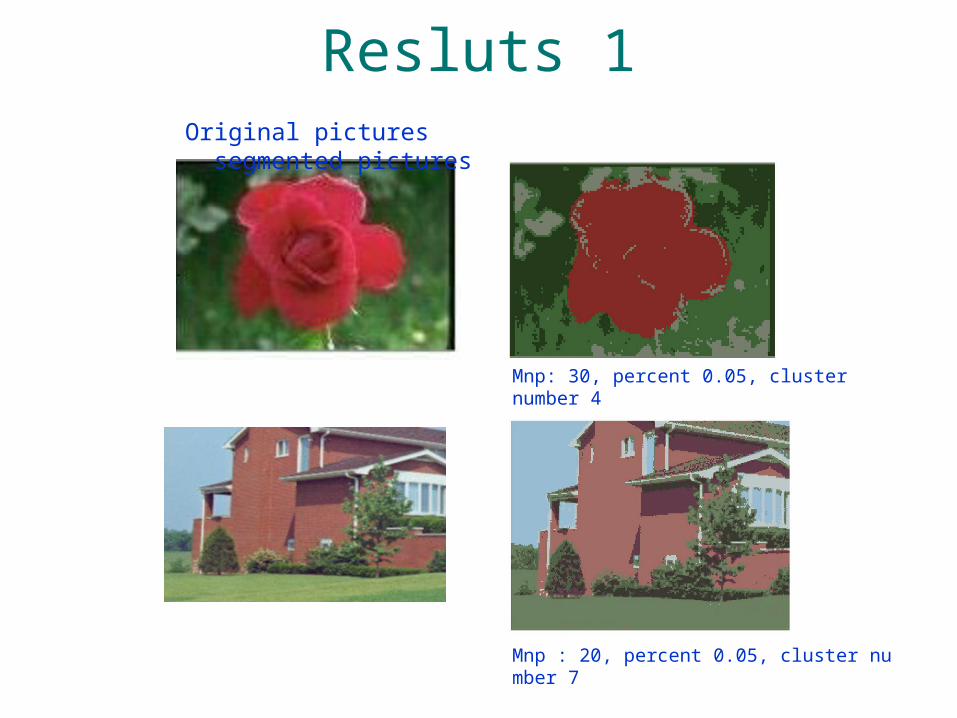
Resluts 1
Mnp: 30, percent 0.05, cluster number 4
Mnp : 20, percent 0.05, cluster number 7
Original pictures segmented pictures
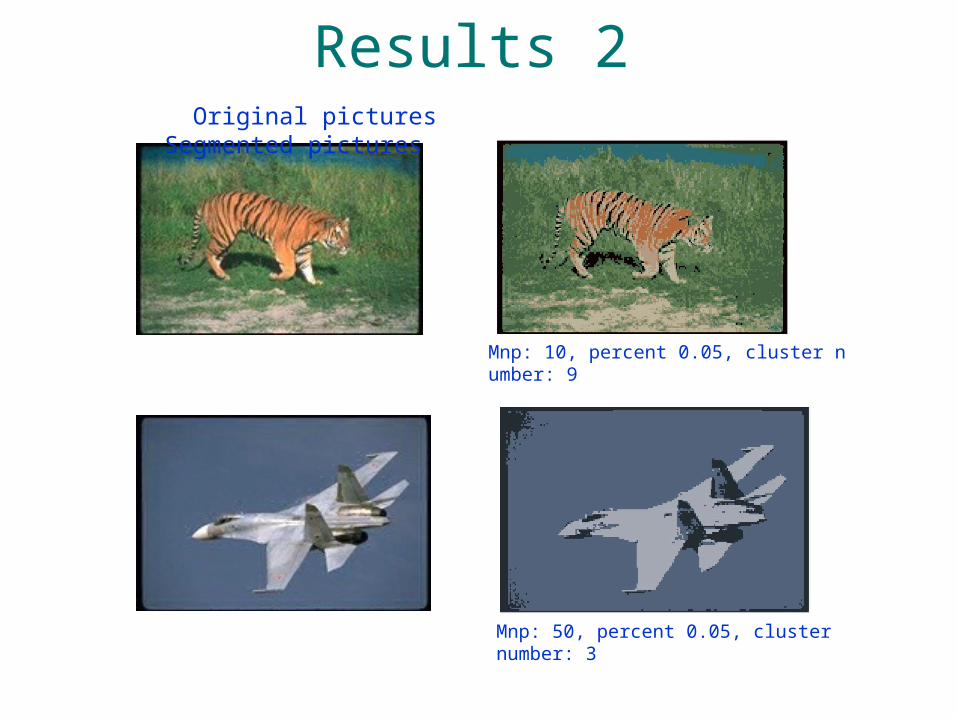
Results 2
Mnp: 10, percent 0.05, cluster number: 9
Mnp: 50, percent 0.05, cluster number: 3
Original pictures Segmented pictures

Results 3Original pictures segmented pictures
Mnp: 10, percent: 0.05, cluster number: 11
Mnp: 30
Percent: 0.05
Cluster number: 4

Image size: 2MB, mnp: 30, cluster number: 5
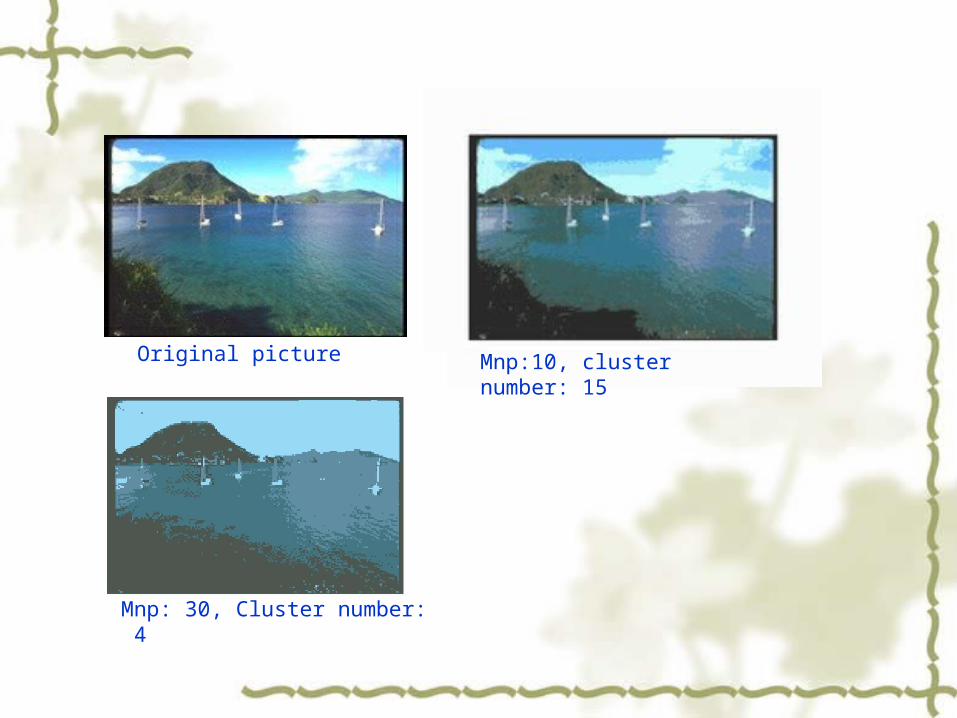
Mnp: 30, Cluster number: 4
Mnp:10, cluster number: 15Original picture

Results movies

Conclusion
Advantages no predefined cluster number user interactive computation time
Disadvantages spatial information lost Cannot deal with noise or outliers