
Image Reconstruction From Scattered Cloud Points...
12
ISSN: 2278 – 909X International Journal of Advanced Research in Electronics and Communication Engineering (IJARECE) Volume 6, Issue 11, November 2017 1298 All Rights Reserved © 2017 IJARECE Abstract— For reconstructing a surface in three dimensions, point clouds are used. Surface reconstruction helps to recreate the model of the object. The approximating surface from a given set of samples is called surface reconstruction. A surface is constructed by carefully selecting points from unorganized point clouds in three dimension space and can be converted into any geometrical shape by removing bad poles. An algorithm is used for the surface reconstruction from different point clouds in different geometrical shapes. The intented set of properties for such algorithms includes: incremental updating, representation of directional uncertainty, the ability to fill gaps in the reconstruction, and robustness in the presence of outliers. Power crust alogorithim is used to remove the bad poles and filteration is applied. The curve filtering and Point filtering is applied. Crust algorithm plays an important role due to its guaranteed quality of mesh generation. Crust algorithm monitors many parameters of mesh generation and examines the performance of the algorithm by calculating parameters. The main aim of the algorithm is to filter out insignificant data while preserving an acceptable level of output quality Index Terms—About four key words or phrases in alphabetical order, separated by commas. I. INTRODUCTION Considering the areas of computer vision and computer graphics, 3D surface reconstruction is the course of capturing the shape and appearance of real objects. This process can be accomplished either by active or passive methods. If the model is allowed to change its shape in time, this is referred to as non-rigid construction. The research of 3D reconstruction has always been a complex goal to achieve. Using 3D reconstruction one can determine 3D profile of any object, as well as knowing the 3D coordinate of any point on the profile. The reconstruction of three-dimensional objects is generally regarded as scientific problem and core technology for a wide variety of fields, such as Computer Aided Geometric Design (CAGD), Computer Graphics, Computer Animation, Computer Vision, medical imaging, computational science, Virtual Reality, digital media, etc. Active Methods Active methods, i.e. range data methods, given the depth map, rebuild the 3D profile by numerical approximation approach and build the object in scenario based on model. These methods actively interfere with the reconstructed object. Passive Method Passive methods of 3D reconstruction do not interfere with the reconstructed object; they only use a sensor to measure the radiance reflected or emitted by the object's surface to infer its 3D structure through image understanding. Typically, the sensor is an image sensor in a camera sensitive to visible light and the input to the method is a set of digital images (one, two or more) or video. Surface reconstruction is the method of attaining three-dimensional complex surface model rapidly and Image Reconstruction From Scattered Cloud Points Using Hybrid Filteration Rumani Sharma*, Arun Bhatia** *ECE, Kurukshetra University, Haryana, INDIA **Lecturer of ECE, Kurukshetra University, Haryana, INDIA
Transcript of Image Reconstruction From Scattered Cloud Points...

ISSN: 2278 – 909X International Journal of Advanced Research in Electronics and Communication Engineering (IJARECE)
Volume 6, Issue 11, November 2017
1298
All Rights Reserved © 2017 IJARECE
Abstract— For reconstructing a surface in three dimensions,
point clouds are used. Surface reconstruction helps to recreate
the model of the object. The approximating surface from a
given set of samples is called surface reconstruction. A surface
is constructed by carefully selecting points from unorganized
point clouds in three dimension space and can be converted
into any geometrical shape by removing bad poles. An
algorithm is used for the surface reconstruction from different
point clouds in different geometrical shapes. The intented set of
properties for such algorithms includes: incremental updating,
representation of directional uncertainty, the ability to fill gaps
in the reconstruction, and robustness in the presence of
outliers. Power crust alogorithim is used to remove the bad
poles and filteration is applied. The curve filtering and Point
filtering is applied. Crust algorithm plays an important role
due to its guaranteed quality of mesh generation. Crust
algorithm monitors many parameters of mesh generation and
examines the performance of the algorithm by calculating
parameters. The main aim of the algorithm is to filter out
insignificant data while preserving an acceptable level of
output quality
Index Terms—About four key words or phrases in
alphabetical order, separated by commas.
I. INTRODUCTION
Considering the areas of computer vision and computer
graphics, 3D surface reconstruction is the course of
capturing the shape and appearance of real objects. This
process can be accomplished either by active or passive
methods. If the model is allowed to change its shape in time,
this is referred to as non-rigid construction.
The research of 3D reconstruction has always been a complex
goal to achieve. Using 3D reconstruction one can determine
3D profile of any object, as well as knowing the 3D
coordinate of any point on the profile. The reconstruction of
three-dimensional objects is generally regarded as scientific
problem and core technology for a wide variety of fields, such
as Computer Aided Geometric Design (CAGD), Computer
Graphics, Computer Animation, Computer Vision, medical
imaging, computational science, Virtual Reality, digital
media, etc.
Active Methods
Active methods, i.e. range data methods, given the depth
map, rebuild the 3D profile by numerical approximation
approach and build the object in scenario based on model.
These methods actively interfere with the reconstructed
object.
Passive Method
Passive methods of 3D reconstruction do not interfere with
the reconstructed object; they only use a sensor to measure
the radiance reflected or emitted by the object's surface to
infer its 3D structure through image
understanding. Typically, the sensor is an image sensor in a
camera sensitive to visible light and the input to the method
is a set of digital images (one, two or more) or video.
Surface reconstruction is the method of attaining
three-dimensional complex surface model rapidly and
Image Reconstruction From Scattered Cloud
Points Using Hybrid Filteration
Rumani Sharma*, Arun Bhatia**
*ECE, Kurukshetra University, Haryana, INDIA
**Lecturer of ECE, Kurukshetra University, Haryana, INDIA

ISSN: 2278 – 909X International Journal of Advanced Research in Electronics and Communication Engineering (IJARECE)
Volume 6, Issue 11, November 2017
1299
All Rights Reserved © 2017 IJARECE
accurately from three-dimensional statistics collected as a
sample, and it is mostly used in reverse engineering.
Three-dimensional data gathered by measuring device is
generally dense, so it is called Point Cloud data. Point cloud
data are considered as an accumulation of the points in
three-dimensional space, and every point cloud data has
three co-ordinates x, y, z.
According to the various forms of data, point cloud data can
be classified into two forms:
I. Ordered point cloud
II. Scattered point cloud.
There is an approach for the reconstruction of a surface, and
scalar fields defined over it, from scattered data points. The
points are assumed sampled from the surfaces of a 3D object,
and the sampling is assumed to be dense and uniform. Laser
range scanners are capable of producing a dense sampling,
usually organized in a rectangular grid, of an object surface.
Some models allow to measure the RGB components of the
color (i.e. three scalar fields) at each sample point. When the
object has simple shape, this grid of points can be an
acceptable representation. However, objects with a more
complex geometry, e.g. objects with holes, handles, pockets,
cannot be scanned in a single pass, and the various scans are
not easy to merge. Other applications, are like recovering the
shape of a bone from contour data extracted from a CT scan,
requires reconstruction of a surface from data points
arranged in slices. The approach of considering the input
points as unorganized are helpful of generating
cross-derivatives by a uniform treatment of all spatial
directions[20].
In High-quality reconstruction of geometry, a core goal is to
capture detailed (or dense) 3D models of the real scene. Many
systems based on real-time tracking, using sparse maps for
localization rather than reconstruction. Other systems have
used simple point based representations (such as surfels or
aligned point clouds) for reconstruction. Kinect Fusion goes
beyond these point-based representations by reconstructing
surfaces, which more accurately approximate real-world
geometry[14].
In some applications, other information derived from CAD
models, measured values or GPS can also be used and
integrated with the sensor data. . In active and passive
sensors, four other methods for object and scene modelling
can currently be classified :
(1) Image-Based Rendering (IBR): This method does not
consider the generation of a geometric 3D model but, for
specific objects and in view of specific camera motions and
scene conditions, it might be taken as a good technique for
the generation of virtual views. IBR creates novel views of
3D environments directly from input images. The Object
discontinuities, especially in large-scale and geometrically
complex environments, will change the output. Therefore,
the IBR method is generally only used for operation that
require limited visualisation.
(2) Image-Based Modelling (IBM): This is the method
which is widely used for geometric surfaces of architectural
objects or for precise terrain and city modeling. IBM methods
(including photogrammetry) use 2D image measurements
(correspondences) to recover 3D object information from a
mathematical model or they obtain 3D data using methods
such as shape from shading, texture, specularity, contour
(medical applications) and shape from 2D edge gradients.
They are very compact and the sensors are often low cost.
(3) Range-Based Modeling: This method directly occupies
the 3D geometric information of an object. It is based on
costly (at least for now) active sensors and can produce a
highly detailed and accurate representation of most shapes.
The sensors rely on artificial lights or pattern projection. In
the past 25 years many advancements have been made in the
field of solid-state electronics and photonics and many active
3D sensors have been developed. Nowadays many
commercial solutions are available, based on triangulation
(with laser light or border projection), time-of-flight,
continuous wave, interferometry or reflectivity measurement
principles.

ISSN: 2278 – 909X International Journal of Advanced Research in Electronics and Communication Engineering (IJARECE)
Volume 6, Issue 11, November 2017
1300
All Rights Reserved © 2017 IJARECE
(4) Combination Of Image-Based And Range-Based
Modeling: Photogrammetry and laser scanning have been
combined in particular for complex or large architectural
objects, in which no technique by itself can be efficiently and
quickly provide a complete and detailed model. Mostly the
basic shapes such as planar surfaces are determined by
image-based methods while the fine details such as reliefs
employ range sensors[15].
1.5 SURFACE RECONSTRUCION PHASES
Surface Reconstruction phases has the following steps :
Phase 1: Initial Surface Estimation
Phase 2: Mesh Optimization
Phase 3: Smooth Surface Optimization
Phase 1: Initial surface estimation: From an unorganized
set of points, phase 1 creates an initial dense mesh. This
phase evaluates the topology of the surface and generates an
initial estimation of the geometry.
Phase 2: Mesh optimization: Initially the dense mesh
generated in phase 1, phase 2 changes the number of faces by
reducing them and improves the fitting to the data points.
This problem is formulated as optimization of an energy
function that models the trade-off between the competing
goals of accuracy, efficiency and preciseness. The number of
vertices in the mesh, the connections between them, and their
respective positions are taken as free variables in
optimization.
Phase 3: Smooth surface optimization: In third phase, the
surface representation is transformed from a piecewise linear
one (meshes) to a piecewise smooth surface. A new piecewise
smooth representation based on subdivision is now
introduced. These surfaces are perfect for surface
reconstruction because they are simple and easy to
implement, models sharp features precisely and can be fitted
using an extension of the phase 2 optimization[9].
Fig. 1 Surface Reconstruction phases
Various areas considered in Surface Reconstruction
Qualitative Properties
Active Illumination
Calibrated Environment
Uncalibrated Environments
An approach for the reconstruction of a surfaces is
considered, and scalar fields defined over it, from scattered
data points. The points are assumed to be sampled from the
surface of a 3D object, and the sampling is considered to be
dense and uniform.
Laser range scanners are able to produce a dense sampling,
mostly organized in a rectangular grid, of an object surface.
Some models also helps to measure the RGB components of
the color (i.e. three scalar fields) at each sampled point.
When the object has a simple shape, this grid of points can
have a sufficient representation. However, objects with a
more complex geometry, e.g. objects with holes, handles,
pockets, cannot be scanned in a single pass, and the various

ISSN: 2278 – 909X International Journal of Advanced Research in Electronics and Communication Engineering (IJARECE)
Volume 6, Issue 11, November 2017
1301
All Rights Reserved © 2017 IJARECE
scans are not easy to merge. Other applications include
restoring the shape of a bone from contour data extracted
from a CT scan, require reconstruction of a surface from data
points organized in slices. This approach of considering the
input points as unorganized has the advantage of producing
cross-derivatives by the equal treatment of all spatial
directions[20].
II. LITERATURE REVIEW
Fabio Remondino, Sabry El-Hakim (2006) presented a full
pipeline for 3D modelling from terrestrial image data,
regarding the different approaches and analysing all the steps
involved. The main problems and the available solutions are
used for the generation of 3D models from terrestrial images.
Shivali Goel, Rajiv Bansal (2013) developed a system for
image reconstruction from scattered cloud points. Crust
algorithm with umbrella Filtering will be implemented.
Crust algorithm plays a vital role due to its guaranteed
quality of triangular mesh generation. Crust algorithm
monitors the various different parameters of mesh generation
and evaluates the performance of the algorithm by
calculating parameters. The main motive of the algorithm is
to filter out left insignificant data while preserving an
acceptable level of output quality.
Mincheol Yoon et. al. (2007) studied the suitability of
ensembles for surface reconstruction. They experimented
with a largely used normal reconstruction technique and
Multi-level Partitions of Unity accurate for surface
reconstruction, showing that normal and surface ensembles
can be completely combined to handle noisy point sets.
Rajdeep Hooda, Anil Kamboj (2016) studied and analised
various algorithms like crust algorithm, power algorithm and
Delaunay algorithm compared for time taken by the
algorithm for the surface reconstruction.
William Y. Chang (2007) studied techniques for
reconstructing surfaces from points. He describe four main
ideas in the graphics literature: signed distance estimation,
Voronoi-based reconstruction, implicit surface fitting, and
moving least squares surfaces. The main challenges include
reconstruction without surface normals, robustness to noise,
accuracy to sharp features, and provable reconstruction
guarantees.
Rajinder Singh (2015) discussed that virtual machines give
users facility to run different operating system on the current
operating system .With the help of Virtual Machines users
can test the new versions of the software whether they fulfill
the requirements or not. Virtual Machines also help to reduce
the hardware cost of the computer system as one can follow
the desired hardware needs. Main player of Virtual Machines
are Virtua Box, VMware , QEMU, and Windows Virtual PC.
Two Virtual Machine software Virtual Box and VMware are
discussed. Various Features of both the machines are also
discussed.
Bernhard Reitinger et. al. developed a first prototype of a
collective 3D reconstruction system for modeling urban
scenes. An Augmented Reality scout is a person who is
supplied with an ultra-mobile PC, an attached USB camera
and a GPS receiver. The scout is exploring the urban
environment and brings a sequence of 2D images. These
images are explained with GPS data and used iteratively as
input for a 3D reconstruction engine which reconstructs the
3D models on-the-fly. This turns modeling into an
interactive and collaborative task.
Bing Han et. al. presented a different surface fitting
approach for 3D dense reconstruction. They proposed a
non-linear deterministic annealing algorithm to dissolve the
3D sparse structure to separate regions, and estimate the
dense depth map by plane surface fitting. The experimental
results reveal that the new approach can segmented in the 3D
space geometrically and generates smoother dense depth
map.

ISSN: 2278 – 909X International Journal of Advanced Research in Electronics and Communication Engineering (IJARECE)
Volume 6, Issue 11, November 2017
1302
All Rights Reserved © 2017 IJARECE
III. PROPOSED WORK
A. PROBLEM ANALYSIS
Having studied the various previous approaches,
techniques and methods used for the recreation of the surface
in three dimensions revealed out numbers of issues related to
it. The limitations found cannot be eliminated to zero, but
can be reduced to an acceptable level by various iterations
performed by filtering the point clouds.
Following are the various issues related to it:
1) Computational Time: It is the most important
criteria to measure the efficiency of a method. The
technique must be time efficient so as to reduce the
time spent on the computation of the point clouds
and removing unwanted point clouds.
2) Noise: The main factor in all the techniques which
should be reduced to minimum is noise. It appears
in form of distortion of the original surface. Since
accurate model is practically not possible, so an
approximate model should be recreated.
3) Space Utilisation: The true requirement is that the
surface should utilize less space. Hence, the
technique should be chosen such that it minimize
the space utilization by removing the unwanted
point clouds from the model.
4) Minimum Cost: It always remains the prime factor
in every field of technology. High efficiency and low
cost is the main criteria to chosose any technique.
Hence, the technique followed must be yield high
output at low cost.
B. Problem Statement
Some type of filter technique which can remove
insignificant data from original data sets. The
researchers are motivated to reduce the cost of
surface reconstruction by removing insignificant
data, because computation cost is closely related to
the complexity of the data. The main aim of the
algorithm is to filter out insignificant data while
preserving an acceptable level of output quality. In
the previous works, reconstruction time and average
distance had been focused. In addition, there are
many factors which can be concentrated upon.
C. Proposed work
Power crust algorithm is our proposed work. The hybrid
filteration technique is used by the combination of curve
filtering and point filtering. Reduction in space points is
obtained by using Power crust algorithm. This algorithm
gives the better utilization of space. Bad poles are also
removed along with the reduction in space. The filteration
techniques are also used – curve filtering and point filtering
with different values of multiplying factor.
IV. RESULT AND ANAYLSIS
Our aim is to reduce the cost of surface reconstruction by
applying filtering techniques such as curve filtering and
point filtering. Below are shown the results of our proposed
work.
1. Here, we first started with a point cloud image which
is named as ‗hot dogs‘. Initially the size of the
image, without filteration, is 1196826, with
multiplying factor, m =1000. Then we applied curve
filtering on the original image with different values
of curve, C.
Fig 2.. showing original image of hotdog without filteration
a) The reduced size is obtained at 0.2 value of C which is
1155676 and this gives reduction in size of
approximately 3.4%.

ISSN: 2278 – 909X International Journal of Advanced Research in Electronics and Communication Engineering (IJARECE)
Volume 6, Issue 11, November 2017
1303
All Rights Reserved © 2017 IJARECE
Fig. 3 showing hotdog with curve filtering
(threshold), C 0.2, giving around 3.4% reduction in
size.
Table for curve filtering applied on Hotdog and
corresponding reduction in space.
Fig. 4 graph of space reduction in % vs curve
filtering(threshold) for hotdog at various values of curve
filtering.
1. Second iteration we performed on point cloud image
‗knots‘. Without applying filteration, the original
size of the image with a multiplying factor m equal
to 100, is 369935.
Fig. 5 showing original size of ‗knots‘ without
filteration.
a) At C equal to 0.5, the reduced size is 261645, which
gives nearly 29% reduction in size.
Fig. 6 representing curve filtering of 0.5 applied on
knots.
Table of various values of curve filtering applied on
knots and their corresponding %age reduction in
size
Image Name- knot
Original Size-
369935
Curve
Filtering(Threshold)
Space Reduction
in %age
0.3 98
0.4 61
0.5 29
Image Name – hotdogs
Original Size-
1196826
Curve Filtering(Threshold) Space Reduction in
%age
0.1 68
0.2 3.4
0.3 0.000083
0.4 0.23
0.5 0.00033
ISSN: 2278 – 909X International Journal of Advanced Research in Electronics and Communication Engineering (IJARECE)
Volume 6, Issue 11, November 2017
1304
All Rights Reserved © 2017 IJARECE
0.6 0.28
0.7 .00027
Fig. 7 Plot between space reduction and curve
filtering on ‗knots‘.
The above shown table and graph are for various
values curve filtering applied on pts file. There is a
considerable decrease in the size by applying
filteration. The graph plotted between various
values of curve filtering and subsequent decrease in
space obtained.
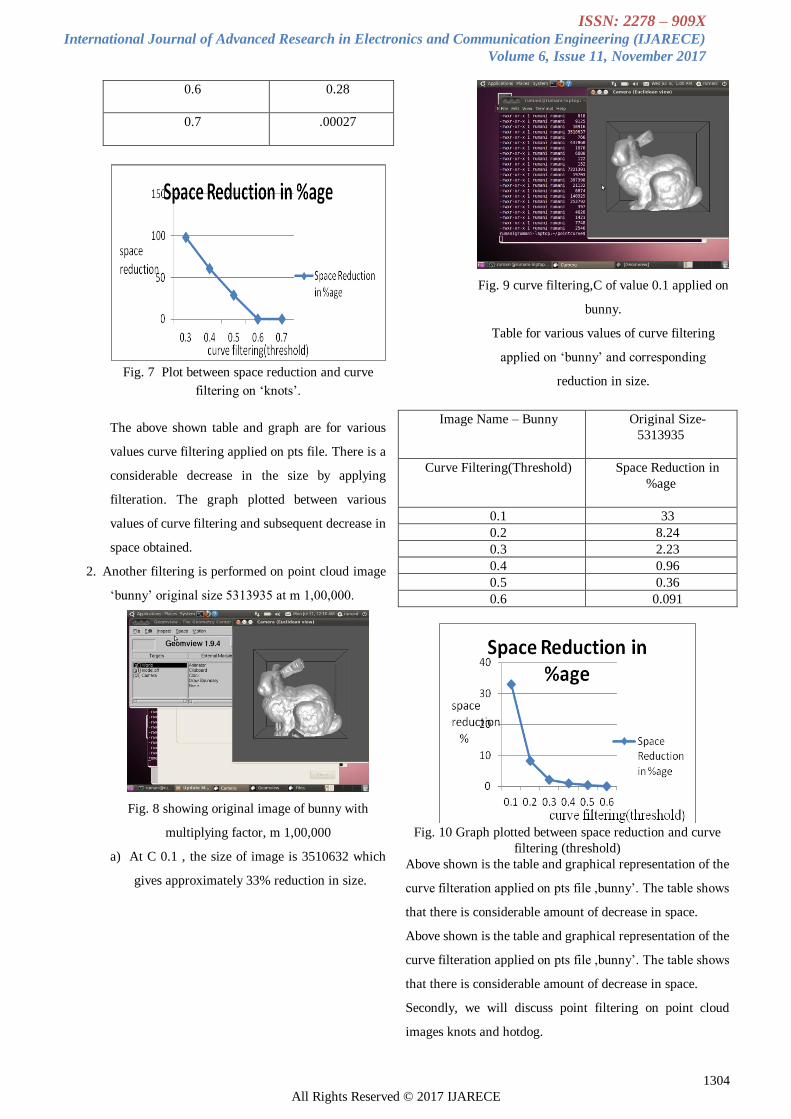
2. Another filtering is performed on point cloud image
‗bunny‘ original size 5313935 at m 1,00,000.
Fig. 8 showing original image of bunny with
multiplying factor, m 1,00,000
a) At C 0.1 , the size of image is 3510632 which
gives approximately 33% reduction in size.
Fig. 9 curve filtering,C of value 0.1 applied on
bunny.
Table for various values of curve filtering
applied on ‗bunny‘ and corresponding
reduction in size.
Image Name – Bunny
Original Size-
5313935
Curve Filtering(Threshold)
Space Reduction in
%age
0.1 33
0.2 8.24
0.3 2.23
0.4 0.96
0.5 0.36
0.6 0.091
Fig. 10 Graph plotted between space reduction and curve
filtering (threshold)
Above shown is the table and graphical representation of the
curve filteration applied on pts file ,bunny‘. The table shows
that there is considerable amount of decrease in space.
Above shown is the table and graphical representation of the
curve filteration applied on pts file ,bunny‘. The table shows
that there is considerable amount of decrease in space.
Secondly, we will discuss point filtering on point cloud
images knots and hotdog.

ISSN: 2278 – 909X International Journal of Advanced Research in Electronics and Communication Engineering (IJARECE)
Volume 6, Issue 11, November 2017
1305
All Rights Reserved © 2017 IJARECE
1. Our first concern will be ‗hotdog‘ whose original size
is 672748 with multiplying factor, m 100. Now
applying different values of point filtering will yield
different results.
Fig. 11 Original image of ‗hotdog‘ without any
filteration.
a) With point filtering of 0.7, the size of image
obtained is 672487 which gives reduction in
size of 0.038%.
Fig. 12 presenting ‗hotdog‘ with point filtering
of 0.7 applied on it.
Table of point filtering with different values applied on
‗hotdog‘ giving reduction in size.
Image Name- Hotdog Original size- 672748
Point Filtering
(Threshold)
Space Reduction in %age
0.7 0.038
0.8 0.022
0.9 0.002
Fig. 13 Plot between space reduction and threshold values of
point filtering applied on ‗hotdog‘.
Space reduction has been obtained by applying point filtering
on pts file named ‗hot dog‘. The Tabular representation as
well as graphical representation has been shown above and
space reduction is obtained at different values of filtering.
2. Now point filtering is applied on ‗hotdog‘ with
combination of curve filtering, keeping value of
curve filtering constant and varying the value of
point filtering.
Fig. 14 Original image of ‗hot dog‘ without
filteration
At first, the value of curve filtering 0.3 is used and
value of point filtering is varied.
a) For point filtering 0.5, the reduction in size
obtained is 666022 which is 0.99%.

ISSN: 2278 – 909X International Journal of Advanced Research in Electronics and Communication Engineering (IJARECE)
Volume 6, Issue 11, November 2017
1306
All Rights Reserved © 2017 IJARECE
Fig. 15 Curve filtering 0.3 and point filtering 0.5 applied
on ‗hotdog‘ giving 0.99% reduction in size.
a) For 0.6 value of point curve, the image of the
size 665765 is obtained, around 1.03% reduced
size.
Fig. 16 Curve filtering 0.3 and point filtering 0.6 applied on
‗hotdog‘ giving 1.03% reduction in size.
Table Point filtering with different values
applied on ‗hotdog‘ giving reduction in size.
Image Name-
Hotdog
Original size-
672748
Point Filtering
(Threshold)
Space Reduction in
%age
0.5 0.99
0.6 1.03
0.7 1.02
Fig.17 Plot between space reduction and threshold values of
point filtering applied on ‗hotdog‘.
V. CONCLUSION
Here Power Crust algorithm has been implemented with
point filtering and curve filtering. Filtering has been applied
to calculate the bad poles and remove them. Removing the
bad poles from the surface improves the space utilisation and
increases efficiency. These points contain important
information for surface reconstruction. Less geometric points
results in ease of computation hence less computational time.
Geometric patterns become more easier to understand.
VI. FUTURE SCOPE
Planned future work includes improving the performance of
the algorithm. We have already achieved better reductions in
the number of centers but at the cost of slower fitting times.
The main disadvantage is that the image is taken only of pts
extension. This is the limitation with the algorithm so we can
improve its efficiency by dealing with another image format.
Improvement can also be achieved by reducing the noise that
appear in the models so that structure can be more accurately
constructed.
REFERENCES
Agostinho de Medeiros Brito Júnior, Adrião Duarte Dória
Neto, Jorge Dantas de Melo, and Luiz Marcos
Garcia Gonçalves, ―An Adaptive Learning
Approach for 3-D Surface
Reconstruction From Point Clouds‖, IEEE
Transactions On Neural Networks, vol 19, issue 6,
May 28, 2008.
[2] Andrei C. Jalba and Jos B. T. M. Roerdink, Senior
Member, IEEE, ” Efficient Surface Reconstruction
From Noisy Data Using Regularized Membrane
Potentials‖, IEEE Transactions On Image
Processing, vol. 18, no. 5, may 2009.
[3] Vikas Chauhan, Manoj Arora and R. S. Chauhan,
Department of Electronics & Communication
Engg., JMIT Radaur, Yamunanagar, INDIA,
―Comparison of Delaunay Algorithm And Crust
Algorithm for the Optimization of Surface

ISSN: 2278 – 909X International Journal of Advanced Research in Electronics and Communication Engineering (IJARECE)
Volume 6, Issue 11, November 2017
1307
All Rights Reserved © 2017 IJARECE
Reconstruction System‖ , Pelagia Research Library
Advances in Applied Science Research, 2011
[4] Yi-Ling Chen, Student Member, IEEE, and
Shang-Hong Lai, Member, IEEE ,‖ An Orientation
Inference Framework for Surface Reconstruction
From Unorganized Point Clouds‖ , IEEE
Transactions On Image Processing, vol. 20, no. 3,
march 2011.
[5] ZHOU Min, Zhongshan Polytechnic, Zhongshan
, Guangdong,‖ A New Approach of Composite
Surface Reconstruction Based on Reverse
Engineering‖, Elsevier Ltd. Procedia Engineering
00 (2011)
[6] Thomas Schops, Torsten Sattler, Christian Hane,
Marc Pollefeys,ETH Zurich, Switzerland, ‖ 3D
Modeling on the Go: Interactive 3D Reconstruction
of Large-Scale Scenes on Mobile Devices‖ , 3DV
2015, ©2015 IEEE.
[7] Ilya Braude, Jeffrey Marker, David Breen,
Department of Computer Science, Drexel
University, Philadelphia, PA, Ken Museth,
Department of Science and Technology, Link¨oping
University, Norrk¨oping, Sweden, Jonathan
Nissanov, Department of Neurobiology & Anatomy,
Drexel University College of Medicine,
Philadelphia, PA, ―Contour-Based Surface
Reconstruction using MPU Implicit Models‖ ,
Elsevier Science.
[8] David Page, Andreas Koschan, and Mongi Abidi,
University of Tennessee, USA,‖ Methodologies and
Techniques for Reverse Engineering–The Potential
for Automation with 3-D Laser Scanners‖.
[9] Bruno Dutailly, Helene Coqueugniot, Pascal
Desbarats, Stefka Gueorguieva, Remi Synave,
Universite Bordeaux, CNRS, Talence Cedex,
France, ―3d Surface Reconstruction Using HMH
Algorithm‖, IEEE, International Conference on
Image Processing December 2009.
[10] Nidhi Sharma, CSE & Kurukshetra University,
Haryana, India, ‖ A Survey on Surface
Reconstruction Algorithms for 3-D Unorganized
points‖, International Journal of Advanced
Research in Computer Science and Software
Engineering, Volume 4, Issue 4, April 2014.
[11] Bruno Dutailly, Helene Coqueugniot, Universite
Bordeaux, CNRS, UMR 5199 PACEA, F-33405,
Talence Cedex, France, Pascal Desbarats, Stefka
Gueorguieva, Remi Synave, Universite Bordeaux,
CNRS, UMR 5800 LaBRI, F-33405, Talence
Cedex, France, ―3D Surface Reconstruction Using
Hmh Algorithm‖, International Conference on
Image Processing · December 2009 DOI:
10.1109/ICIP.2009.5413911, Source: IEEE Xplore.
[12] Bernhard Reitinger, Dieter Schmalstieg, Institute
for Computer Graphics and Vision, Graz University
of Technology, Austria, Christopher Zach, VRVis
Research Center, Austria, ―Augmented Reality
Scouting for Interactive 3D Reconstruction‖, IEEE,
2007.
[13] Hailin Jin, Anthony J. Yezzi, Yen-Hsi Tsai,
Li-Tien Cheng, and Stefano Soatto , ―Estimation of
3D Surface Shape and Smooth Radiance from 2D
Images: A Level Set Approach‖, Journal of
Scientific Computing, Vol. 19, Nos. 1–3, December
2003, Received May 3, 2002; accepted (in revised
form) September 14, 2002.
[14] Shahram Izadi, Otmar Hilliges, Pushmeet Kohli,
Jamie Shotton, Steve Hodges, Microsoft Research
Cambridge, UK, Dustin Freeman, University of
Toronto, Canada, Andrew Fitzgibbon, David Kim,
Newcastle University, UK, David Molyneaux,
Lancaster University, UK, Richard Newcombe,
Andrew Davison, Imperial College London, UK,
―KinectFusion: Real-time 3D Reconstruction and
Interaction Using a Moving Depth Camera‖,
October 16, 2011, research conducted at Microsoft
Research Cambridge, UK.
[15] Fabio Remondino , Swiss Federal Institute of
Technology (ETH), Zurich, Sabry El, National
Research Council, Ottawa, Canada, ―Image-Based

ISSN: 2278 – 909X International Journal of Advanced Research in Electronics and Communication Engineering (IJARECE)
Volume 6, Issue 11, November 2017
1308
All Rights Reserved © 2017 IJARECE
3d Modelling: A Review‖, The Photogrammetric
Record 21(115): 269–291 (September 2006).
[16] SHIVALI GOEL , CSE, Kurukshetra University,
Kurukshetra, India, RAJIV BANSAL, Assistant
Professor (CSE), JMIT, Yamuna Nagar, Haryana,
India, ‖ Implementation Of Surface Reconstruction
Using Scattered Point Cloud With Crust
Algorithm‖, International Journal of Computer
Science and Engineering (IJCSE), ISSN
2278-9960,Vol. 2, Issue 4, Sep 2013, 185-190 ©
IASET.
[17] Jing Tong, Jin Zhou, Ligang Liu, Zhigeng Pan, and
Hao Yan, ‖ Scanning 3D Full Human Bodies using
Kinects‖.
[18] Shivali Goel ,CSE, Kurukshetra University,India,
Rajiv Bansal, Asst Prof. (CSE), JMIT ,India, ―
Surface Reconstruction Using Scattered Cloud
Points ―International Journal of Advanced Research
in Computer Science and Software Engineering,
Volume 3, Issue 5, May 2013.
[19] J. C. Carr, T. J. Mitchell, Applied Research
Associates NZ Ltd, University of Canterbury, J. B.
Cherrie, W.R. Fright, B. C. McCallum, Applied
Research Associates NZ Ltd, R. K. Beatson,
University of Canterbury, ―Reconstruction and
Representation of 3D Objects with Radial Basis
Functions‖, 2001.
[20] Chandrajit L. Bajaj, Fausto Bernardini, Guoliang
Xu, Department of Computer Sciences, Purdue
University, ―Automatic Reconstruction of Surfaces
and Scalar Fields from 3D Scans‖, Kluwer
Academic publisher by Norwell, MA, 2004.
[21] Mincheol Yoon, Yunjin Lee, Seungyong Lee,
Department of Computer Science and Engineering,
POSTECH, San 31, Hyoja-dong, Pohang, 790-784,
Republic of Korea, Ioannis Ivrissimtzis,
Department of Computer Science, Durham
University, South Road, Durham DH1 3LE, UK,
Hans-Peter Seidel, Max-Planck-Institut f¨ur
Informatik, Stuhlsatzenhausweg 85, 66123
Saarbrucken, Germany, ‖ Surface and normal
ensembles for surface reconstruction‖
Sciencedirect, Computer-Aided Design 39 (2007)
408–420, Received 14 September 2006; accepted 16
February 2007.
[22] William E. Lorensen, Harvey E. Cline, General
Electric Company, Corporate Research and
Development, Schenectady, New York 12301,
―Marching Cubes: A High Resolution 3D Surface
Construction Algorithm‖, Computer Graphics,
Volume 21, Number 4,July 1987. William E.
[23] Brian Curless and Marc Levoy, Stanford University,
―A Volumetric Method for Building Complex
Models from Range Images‖, SIGGRAPH '96
Proceedings of the 23rd annual conference on
Computer graphics and interactive techniques,
1996.
[24] Amin Alqudah,Computer Engineering
Department, Hijjawi Faculty for Engineering
Technology, Yarmouk University, Irbid, Jordan,
―Survey of Surface Reconstruction Algorithms‖,
Journal of Signal and Information Processing,
2014, 5, 63-79, Published Online August 2014 in
SciRes, Received 8 April 2013; revised 15 May
2013; accepted 7 June 2013.
[25] Gang Zeng, Long Quan, Dep. of Computer Science,
HKUST, Clear Water Bay, Kowloon, Hong Kong,
Sylvain Paris, GRAVIR-IMAG, INRIA
Rhone-Alpes, 38334, Saint Ismier, France, Maxime
Lhuillier, LASMEA, UMR CNRS 6602, Universite
Blaise-Pascal, 63177, Aubiere, France, ―Surface
Reconstruction by Propagating 3D Stereo Data in
Multiple 2D Images‖, Springer-Verlag Berlin
Heidelberg 2004.
[26] Rajdeep Hooda, Anil kamboj, ―A Survey of Surface
Reconstruction‖, International Journal of Advanced
Research in Electronics and Communication
Engineering (IJARECE) Volume 5, Issue 4, April
2016.

ISSN: 2278 – 909X International Journal of Advanced Research in Electronics and Communication Engineering (IJARECE)
Volume 6, Issue 11, November 2017
1309
All Rights Reserved © 2017 IJARECE
[27] William Y. Chang, Department of Computer
Science and Engineering, University of California,
San Diego, ‖ Surface Reconstruction from Points‖
[28] Andrei C. Jalba and Jos B. T. M. Roerdink Senior
Member, IEEE, ―Efficient Surface Reconstruction
using Generalized Coulomb Potentials‖, IEEE
Transactions On Visualization And Computer
Graphics, vol. 13, no. 6, november/december 2007.
[29] Rajinder Singh, Dept. of Computer Science and
Applications, Panjab University S.S.G. R.C.
Hoshiarpur Punjab, India, ― A Comparison of
Features of VirtualBox and VMware‖, International
Journal of Advanced Research in Computer Science
and Software Engineering, Volume 5, Issue 9,
September 2015.
[30] V. Estellers, M.A. Scott, S. Soatto, ―Robust Surface
Reconstruction‖Society for Industrial and Applied
Mathematics, Vol. xx, pp. x x–x
[31]
https://en.wikipedia.org/wiki/Ubuntu_(operating_
system)
http://blog.sudobits.com/2012/07/20/top-17-termin
al-commands-every-ubuntu-user-should-know-abo
ut/
[32] http://www.geomview.org/
[33]
https://www-uxsup.csx.cam.ac.uk/pub/doc/suse/su
se9.0/userguide-9.0/ch24s04.html.
[34] https://help.ubuntu.com/community/VirtualBox
[35]
https://en.wikipedia.org/wiki/GNU_Compiler_Co
llection

















