![Free Surface Monitoring Using Image Processing...The image processing described in this paper was undertaken using MATLAB [2] and the MATLAB Image Processing Toolbox because they are](https://static.fdocuments.us/doc/165x107/5feefd6b4f8fdf2e283baa6a/free-surface-monitoring-using-image-processing-the-image-processing-described.jpg)
Image Processing Toolbox Lecturebrd4.ort.org.il/~ksamuel/ImProc.31651/Lectures.For... · Image...
85
1 Image Processing Toolbox Matlab
Transcript of Image Processing Toolbox Lecturebrd4.ort.org.il/~ksamuel/ImProc.31651/Lectures.For... · Image...

1
Image Processing Toolbox
Matlab
2
1. Introduction
• Matlab Platform for Image/Video Processing• Image Acquisition and Sampling• Some Applications• Aspects of Image Processing• Grayscale/RGB/Index Color Images• Image Format Conversion• Basics of Image Display

3
Matlab Platform for Image/Video Processing
• Matrix Laboratory• Internal Data Structure and Matrix Operators are natural for Image
Processing• Intrinsic Matrix Operators are implemented with highly efficient
Algorithms• Simple access to OS file system and interactive operations over the
Working Space simplifies algorithm development• Ready to use Signal/Image Processing Toolboxes contain highly
efficient functions which cover modern and even novel algorithms• Matlab Language allows Highly Structured Object Oriented
Programming Environment• The Full list of Image Processing Toolbox functions – help images
4
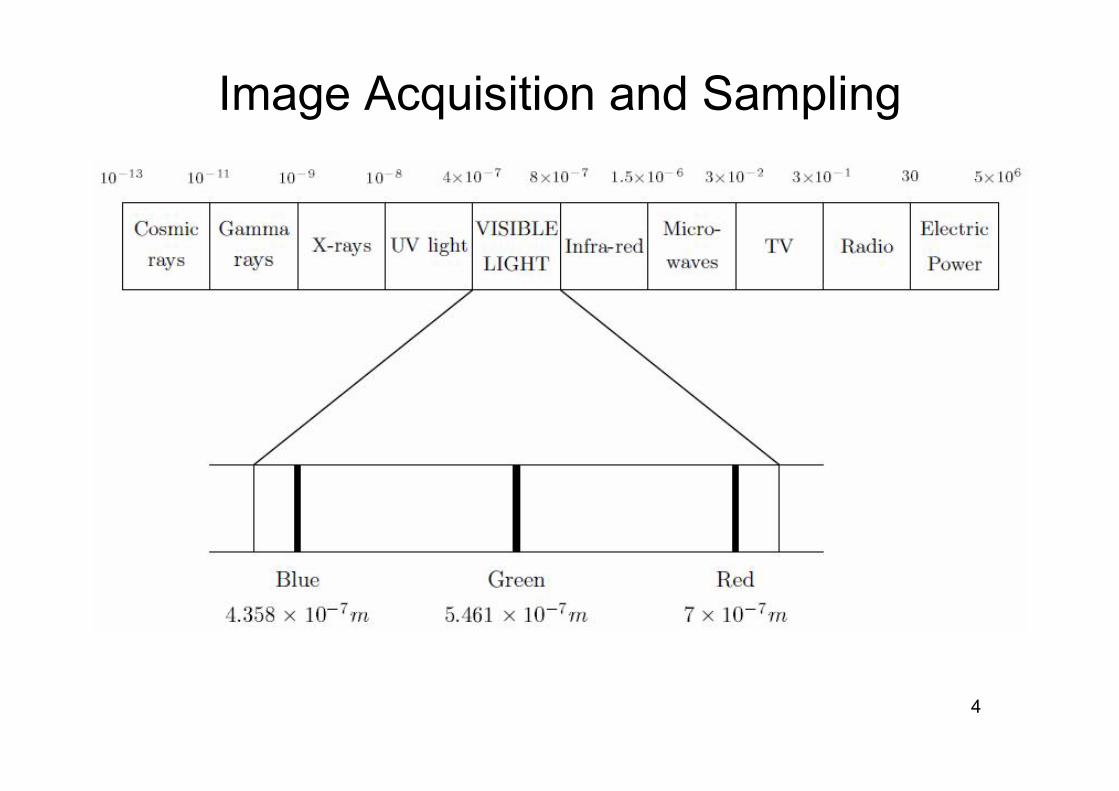
Image Acquisition and Sampling

5
Image Acquisition and Sampling

6
Image Acquisition and Sampling
• Browsing File System[Fname,Fdir]=uigetfile( ‘*.jpg’,’Click on Image file’ );
a = imread(Fname);

7
Image Acquisition and Samplingfigure; imshow(a);

8
Image Acquisition and Samplingimfinfo([Fdir,F1name])
ans =
Filename: [1x80 char]FileModDate: '25-May-2010 09:06:44'
FileSize: 976879Format: 'jpg'
FormatVersion: ''Width: 2592Height: 1944
BitDepth: 24ColorType: 'truecolor'
FormatSignature: ''NumberOfSamples: 3
CodingMethod: 'Huffman'CodingProcess: 'Sequential'
Comment: {}ImageDescription: ' '
Make: 'NIKON 'Model: 'E5600 '
Orientation: 1XResolution: 300YResolution: 300
ResolutionUnit: 'Inch'Software: 'E5600v1.0 'DateTime: '2010:05:25 09:06:44 '
YCbCrPositioning: 'Co-sited'DigitalCamera: [1x1 struct]
disp(ans.FileSize)976879

9
Image Acquisition and Sampling
B=rgb2gray(a); figure; imshow(b); figure; mesh(B); colormap(gray);

10
Some Applications and Examples• Medical
– Inspection and interpretation of images obtained from X-rays, MRI or CAT scans
– analysis of cell images, of chromosome karyotypes.
• Agriculture– Satellite/aerial views of land, for example to determine how much land
is being used for different purposes, or to investigate the suitability of different regions for different crops,
– inspection of fruit and vegetables distinguishing good and freshproduce from old.
• Industry– Automatic inspection of items on a production line,– inspection of paper samples.
• Law enforcements– Fingerprint analysis,– sharpening or de-blurring of speed-camera images.

11
Some Aspects of Image Processing• Image enhancement
– sharpening or de-blurring an out of focus image,– highlighting edges,– improving image contrast, or brightening an image,– removing noise.
• Image restoration– removing of blur caused by linear motion,– removal of optical distortions,– removing periodic interference.
• Image segmentation– finding lines, circles, or particular shapes in an image,– in an aerial photograph, identifying cars, trees, buildings, or roads.
• Image Geometry Transformation– affine transformation

12
Some Applications and Examples

13
Some Applications and Examples

14
Some Applications and Examples

15
Some Applications and Examples

16
Grayscale Images

17
RGB Images
18
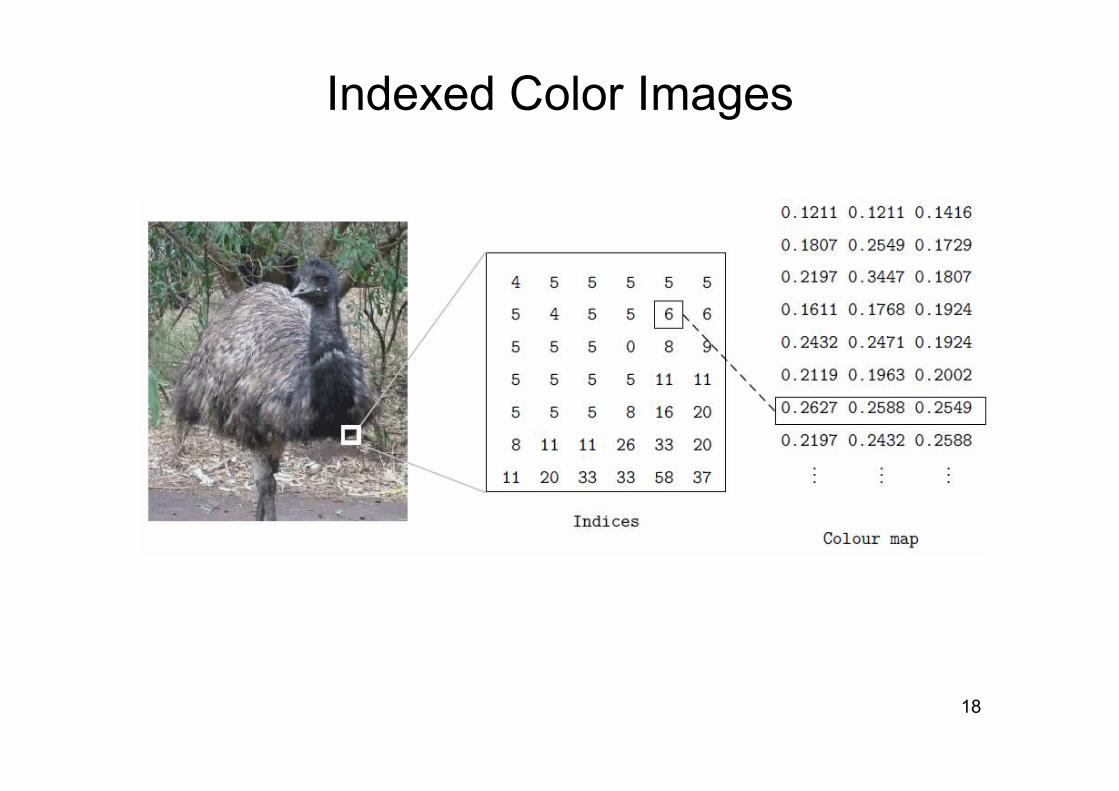
Indexed Color Images

19
Indexed Color Imagesfigure; imshow(a); [y,map]=rgb2ind(a,256);
Figure; image(y); colormap(map)
500 1000 1500 2000 2500
200
400
600
800
1000
1200
1400
1600
1800

20
Data Types & Image Format Conversion

21
Basics of Image Displayimpixelinfo

22
Basics of Image Displayimprofile; grid on

23
Basics of Image DisplayImage
c=imread(‘cameraman.tif’);figure; image(c);
50 100 150 200 250
50
100
150
200
250
figure; image(c);colormap(gray);
50 100 150 200 250
50
100
150
200
250
n=size(unique(c));figure; image(c);colormap(gray(n));
50 100 150 200 250
50
100
150
200
250
24
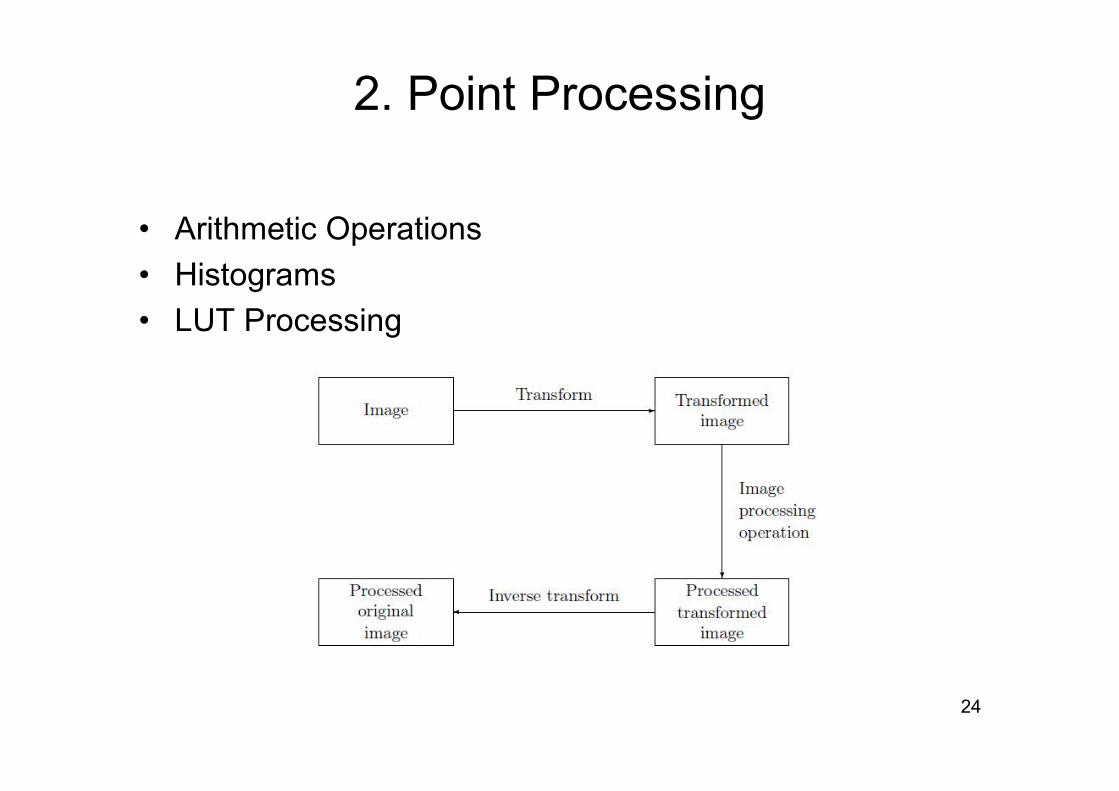
2. Point Processing
• Arithmetic Operations• Histograms• LUT Processing

25
Arithmetic Operationsb=imread(‘blocks.tif’’);
b1=uint8(double(b)+128);Or b1=imadd(b,128);
b2=imsubstruct(b,128);
imaddimsubstractimmultiplyimdivideimcomplement
26
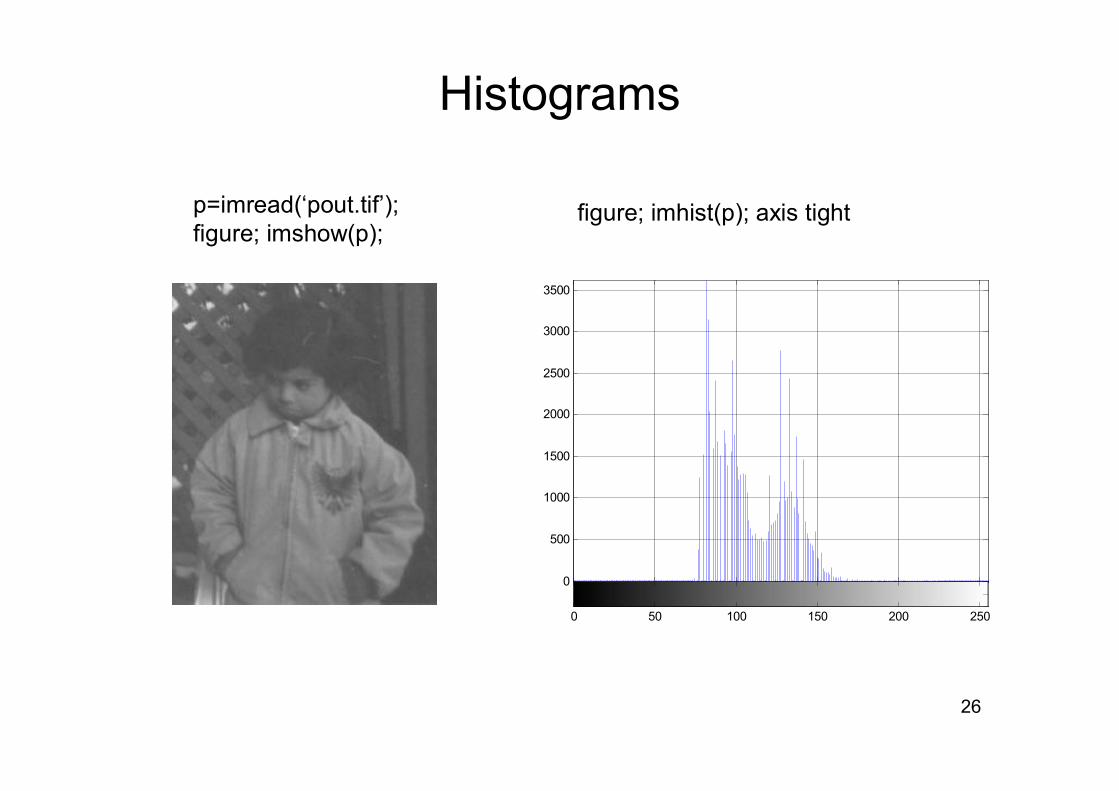
Histograms
0
500
1000
1500
2000
2500
3000
3500
0 50 100 150 200 250
figure; imhist(p); axis tightp=imread(‘pout.tif’);figure; imshow(p);

27
Histograms
figure; imhist(p1); axis tight
0
500
1000
1500
2000
2500
3000
3500
0 50 100 150 200 250
p1=histeq(p);figure; imshow(p1);
Histogram Equalization – histeq()

28
Histograms
A=adapthisteq(I,’clipLimit’,0.02,’Distribution’,’rayleigh’);figure; imshow(A);
Adaptive Histogram Equalization – adapthisteq()
I=imread(‘tire.tif’);figure; imshow(I);
29
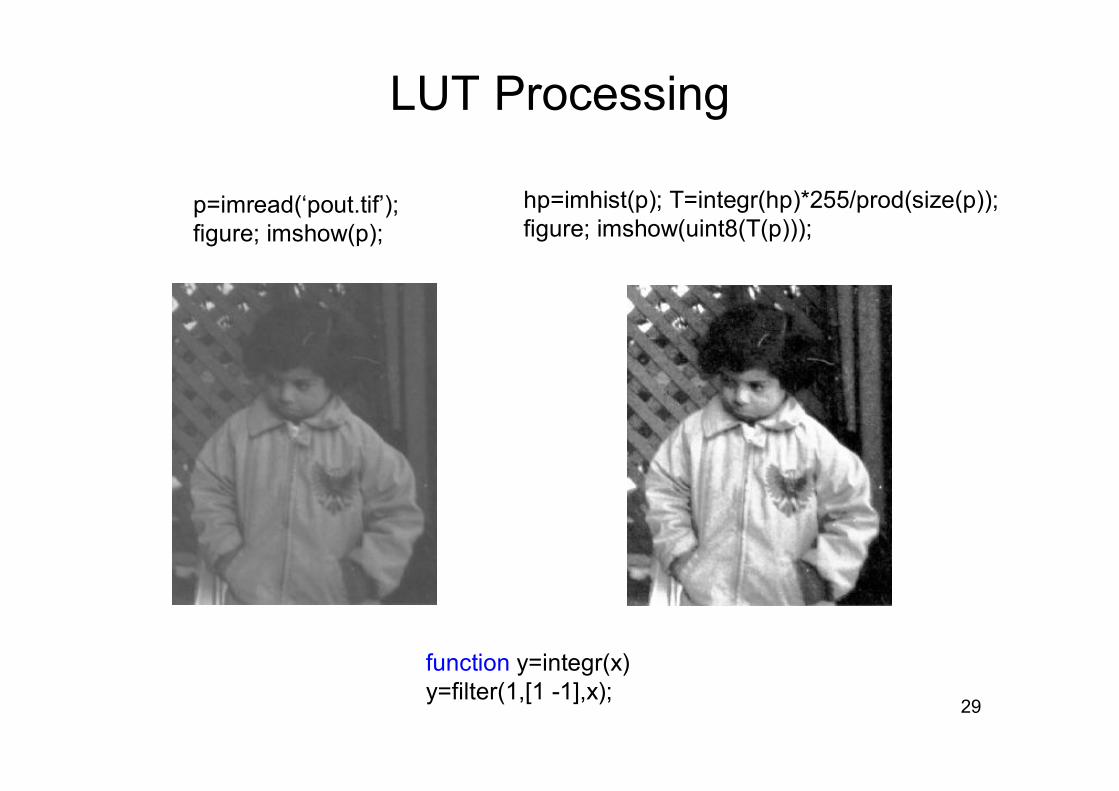
LUT Processing
hp=imhist(p); T=integr(hp)*255/prod(size(p));figure; imshow(uint8(T(p)));
p=imread(‘pout.tif’);figure; imshow(p);
function y=integr(x)y=filter(1,[1 -1],x);
30
3. Neighbourhood Processing
• Filtering in Matlab• Frequencies; Low and High Pass Filters• Edge sharpening• Non-linear Filters

31
Filtering in MatlabPerforming Spatial Filtering

32
Filtering in MatlabPerforming Spatial Filtering

33
Filtering in MatlabPerforming Spatial Filtering

34
Filtering in MatlabPerforming Spatial Filtering

35
Filtering in Matlab
36
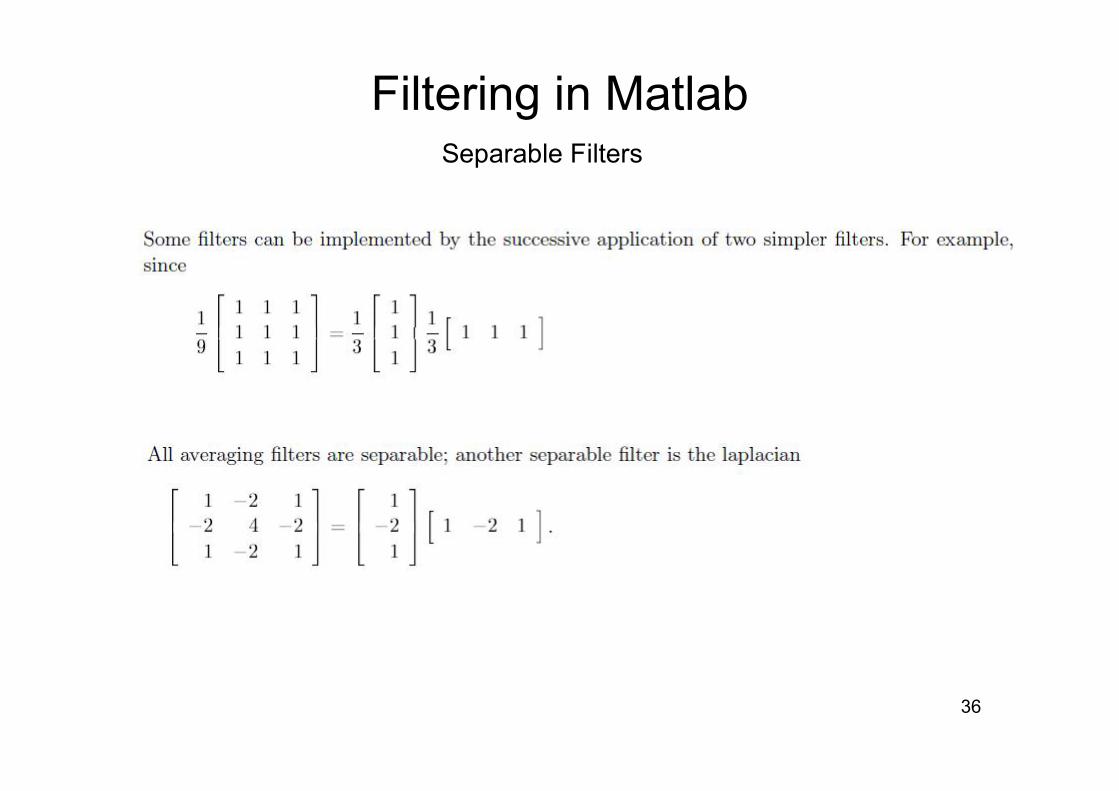
Filtering in MatlabSeparable Filters

37
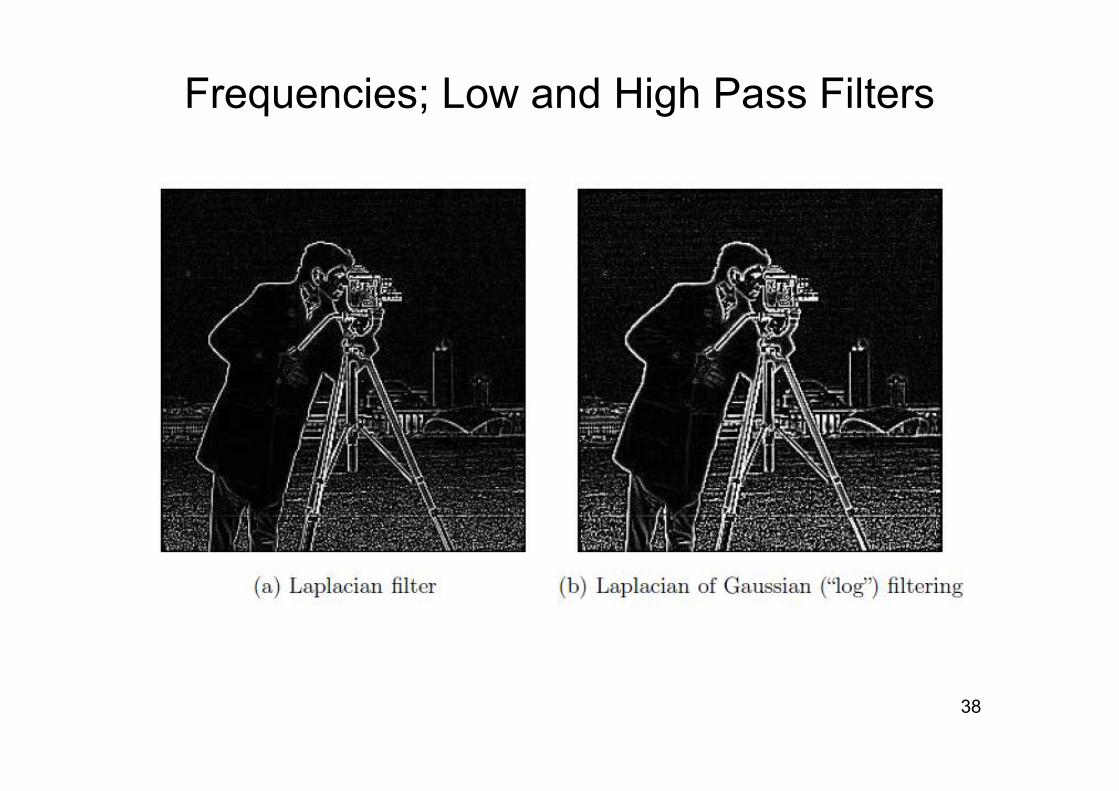
Frequencies; Low and High Pass Filters
38
Frequencies; Low and High Pass Filters
39
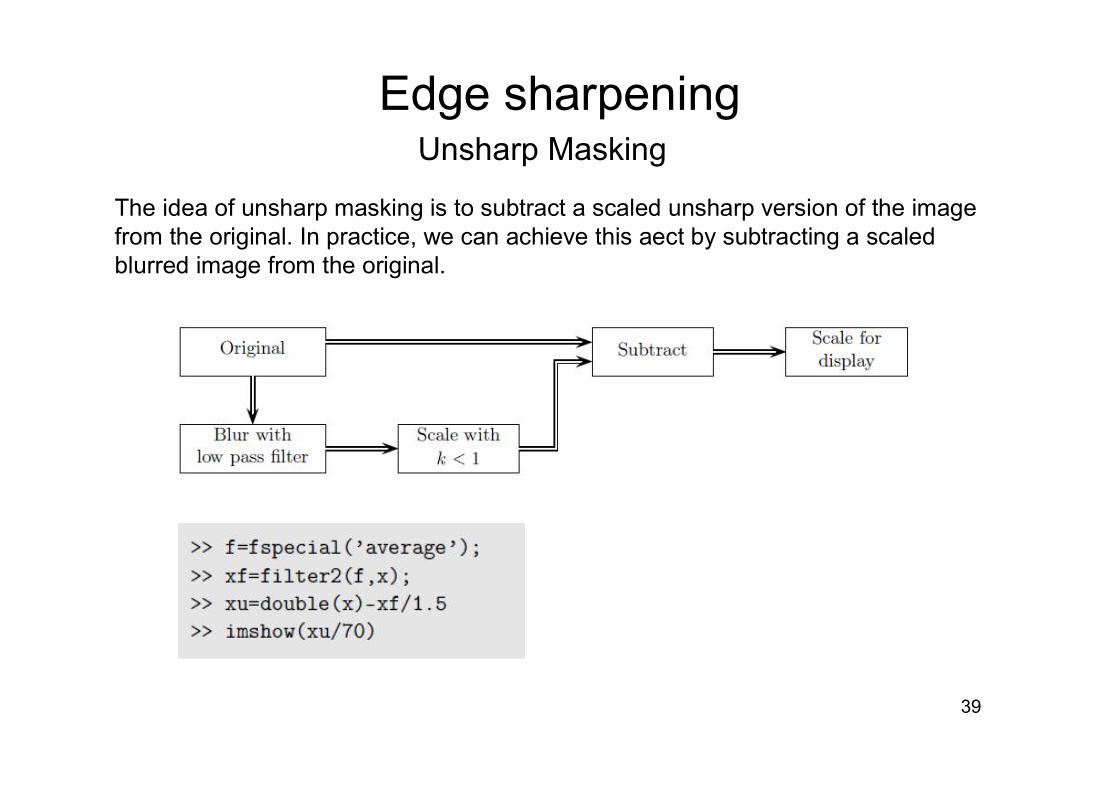
Edge sharpeningUnsharp Masking
The idea of unsharp masking is to subtract a scaled unsharp version of the image from the original. In practice, we can achieve this aect by subtracting a scaled blurred image from the original.

40
Edge sharpeningUnsharp Masking

41
Edge sharpeningUnsharp Masking

42
Edge sharpeningUnsharp Masking

43
Non-linear Filters

44
4. The Fourier Transform
• The 1D/2D discrete Fourier transform• Fourier transforms in Matlab• Fourier transforms of images• Matlab Programming Concepts• Filtering in the frequency domain

45
The 1D/2D discrete Fourier transform

46
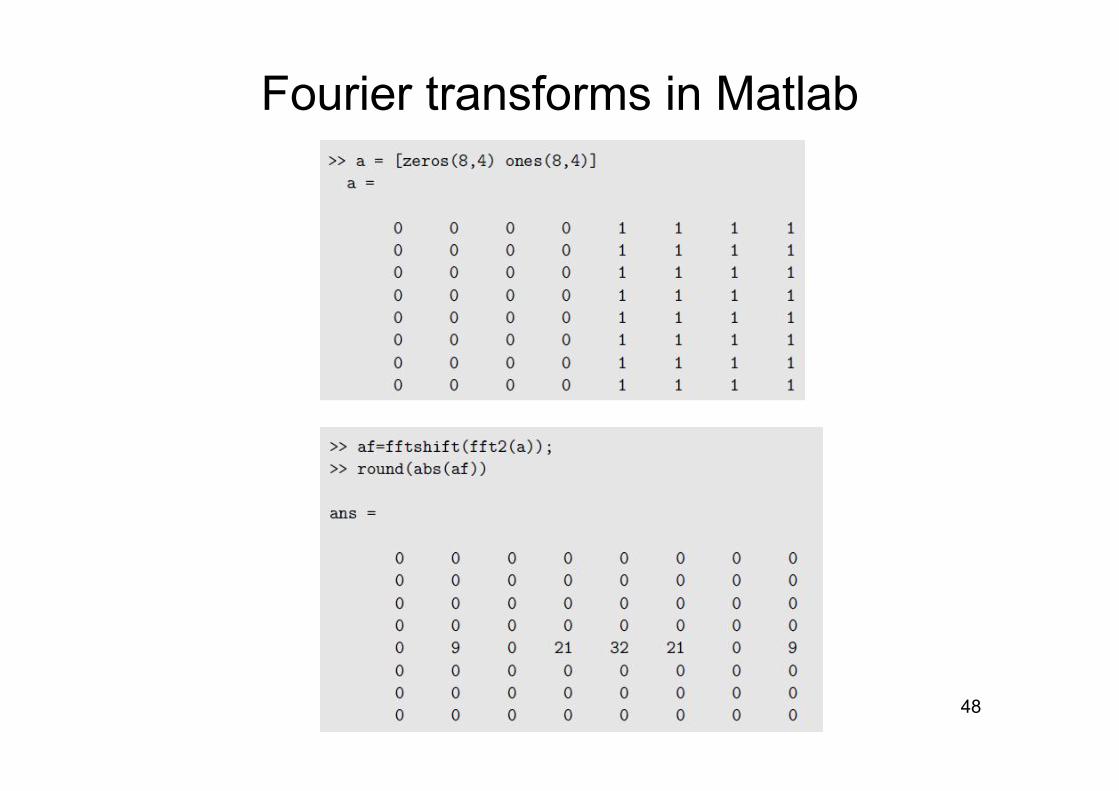
Fourier transforms in Matlab
• fft which takes the DFT of a vector,• ifft which takes the inverse DFT of a vector,• fft2 which takes the DFT of a matrix,• ifft2 which takes the inverse DFT of a matrix,• fftshift which shifts a transform

47
Fourier transforms in Matlab
48
Fourier transforms in Matlab

49
Fourier transforms of images

50
Fourier transforms of imagesExamples

51
Fourier transforms of imagesExamples

52
Fourier transforms of imagesExamples

53
Fourier transforms of imagesExamples
54
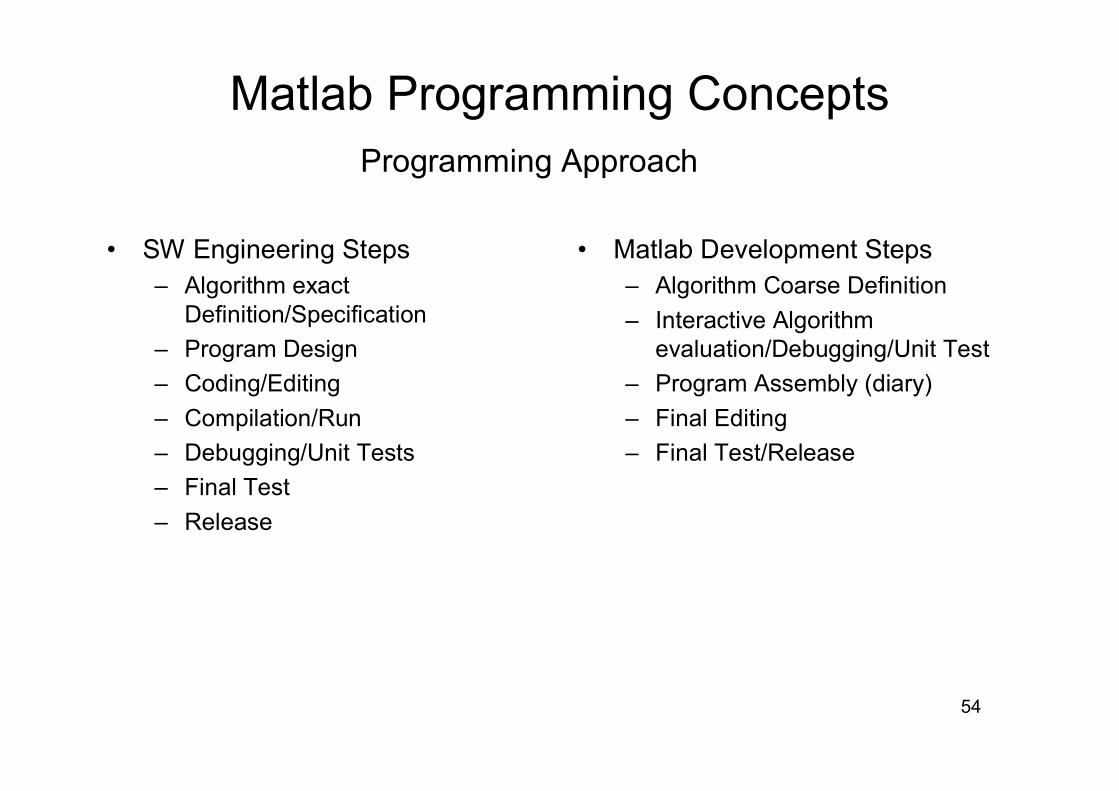
Matlab Programming Concepts
• SW Engineering Steps– Algorithm exact
Definition/Specification– Program Design– Coding/Editing– Compilation/Run– Debugging/Unit Tests– Final Test– Release
• Matlab Development Steps– Algorithm Coarse Definition– Interactive Algorithm
evaluation/Debugging/Unit Test– Program Assembly (diary)– Final Editing– Final Test/Release
Programming Approach

55
Matlab Programming ConceptsProgramming Features
• Matlab traditional variable: double precision complex matrix (2D)• Matlab Image/Video oriented variables: int8, uint8, frame, NaN, etc;• Matlab structures: cell-arrays, functions, inline function, etc;• Extended help: comment block, help, doc, lookfor, whos, which, etc;• Program flow controls: for...end, if…end, while…end, switch…end, etc;• Objects: figure, plot, imshow, avifile, imaqhwinfo, videoinput, @file, etc;• File access functions: fprinf, imread, read, write, fopen, fclose, etc;• DDE operators: ddeinit, xlsfinfo, xlsread, xlswrite, csvread, etc;• GUI editor;• Build-in benchmarking: tic, toc, clock, cputime, memory, etc;• Half-compiler (second run is faster!)
56
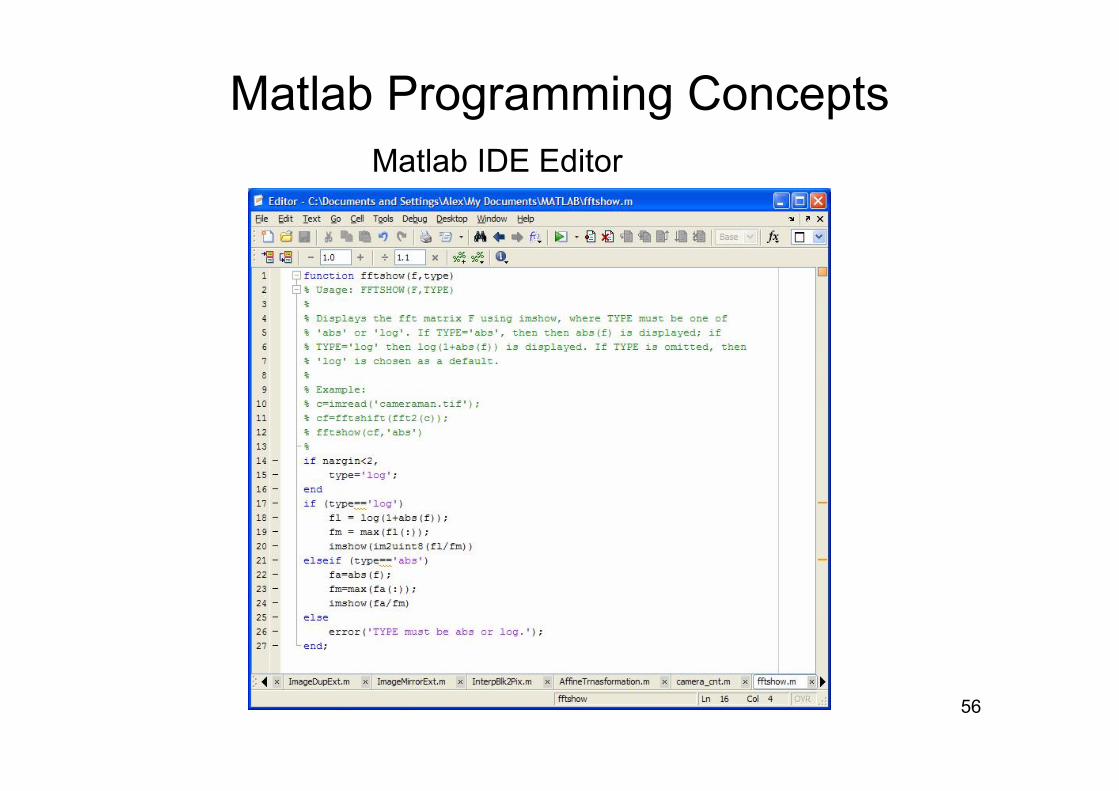
Matlab Programming ConceptsMatlab IDE Editor

57
Matlab Programming ConceptsProgramming Stile (recommendations)
• Maximal use of matrix notation• Avoid program flow controls (no for-loops!)• Maximal use logical matrix operation• “Vectorized” file access• Standard m-file structure:
– function [y1,y2]=myfunc(x1,x2,x3)%myfunc – brief description …% continue help block%Syntax: [y1,y2]=myfunc(x1,x2,x3), where%x1 – first argument …
%Author: … (not visible by help)Function body:a=x1; %comment

58
Filtering in the frequency domain

59
Filtering in the frequency domainIdeal LPF (the same dimensions as image)
Filter Application

60
Filtering in the frequency domain
Filter Application
Ideal HPF (the same dimensions as image)
61
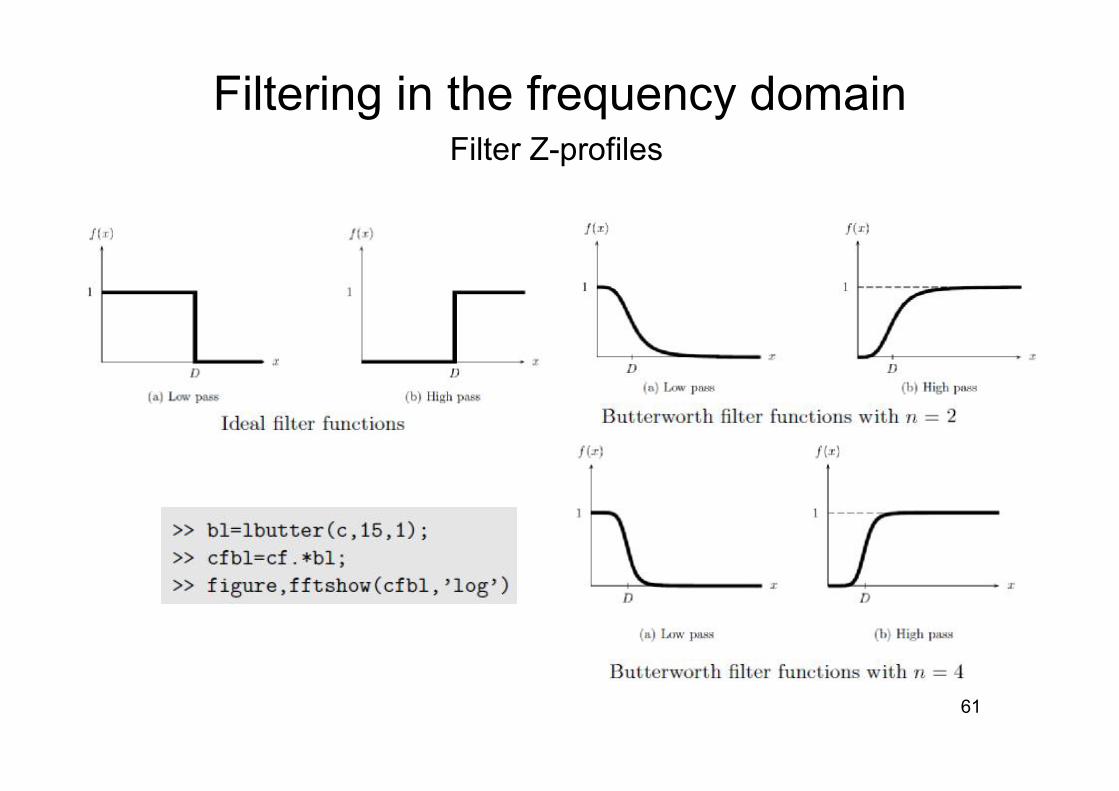
Filtering in the frequency domainFilter Z-profiles

62
Filtering in the frequency domainButterworth Filters

63
Filtering in the frequency domainGaussian Filter

64
Filtering in the frequency domainLP Gaussian Filter

65
Filtering in the frequency domainHP Gaussian Filter

66
5. Image Restoration
• Noise• Cleaning salt and pepper noise• Cleaning Gaussian noise• Removal of periodic noise• Debluring

67
NoiseSalt and pepper noise Gaussian noise (additive)
Speckle noise (multiplicative) Periodic noise
68
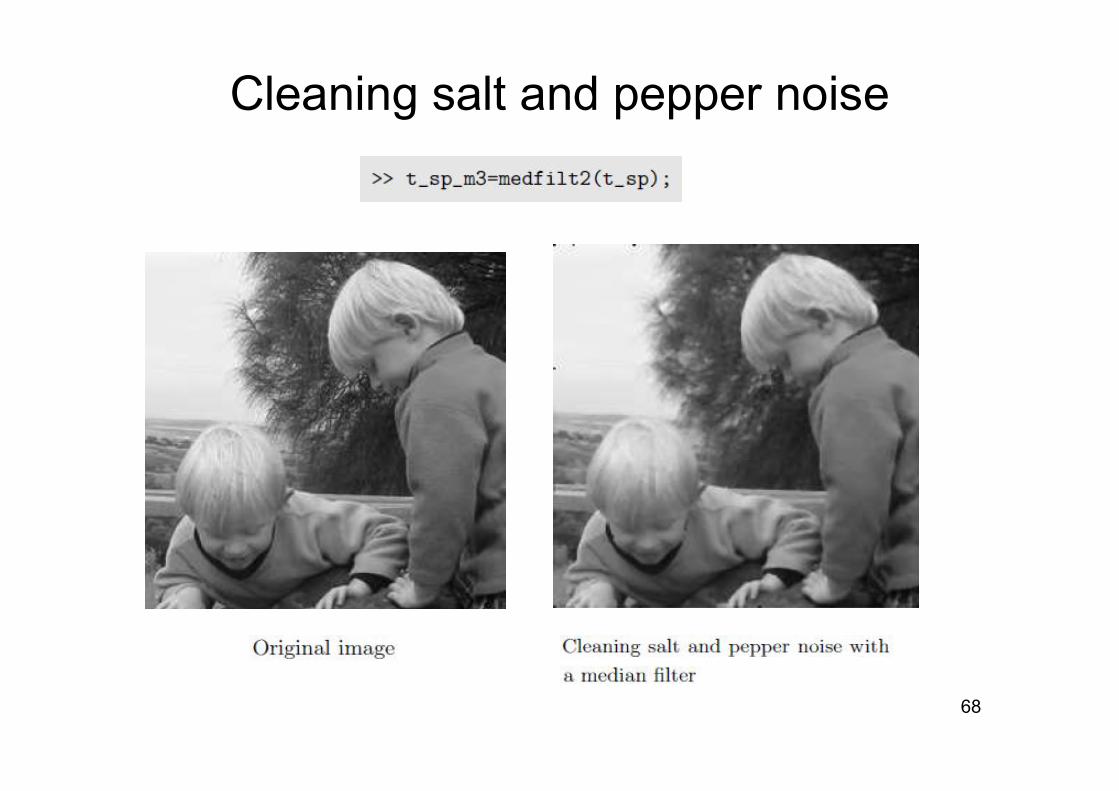
Cleaning salt and pepper noise

69
Cleaning Gaussian noiseImage averaging
It may sometimes happen that instead of just one image corrupted with Gaussian noise, we have many different copies of it. An example is satellite imaging; if a satellite passes over the same spot many times, we will obtain many different images of the same place.
70
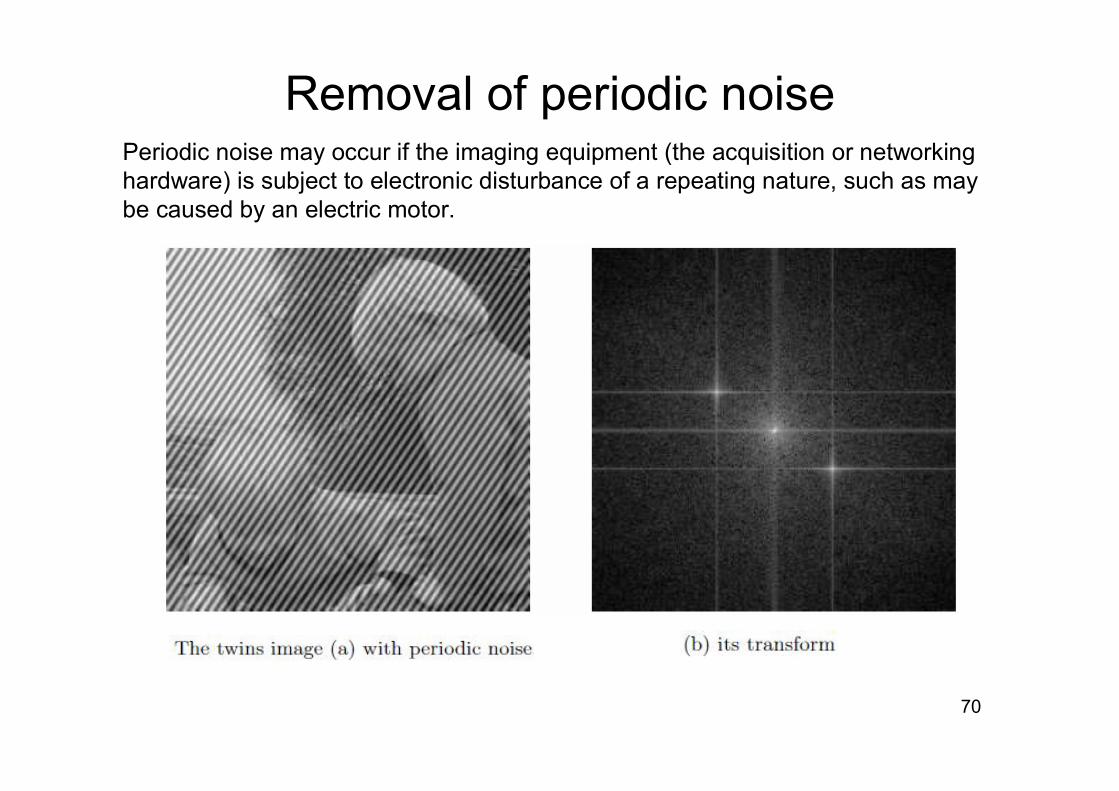
Removal of periodic noisePeriodic noise may occur if the imaging equipment (the acquisition or networking hardware) is subject to electronic disturbance of a repeating nature, such as may be caused by an electric motor.

71
Removal of periodic noiseBand reject Filtering

72
Removal of periodic noiseNotch Filtering

73
Debluring
The result of motion blur

74
DebluringTo deblur the image, we need to divide its transform by the transform corresponding to the blur filter. This means that we first must create a matrix corresponding to the transform of the blur:
Now we can attempt to divide by this transform.

75
DebluringWe can constrain the division by only dividing by values which are above a certain threshold.

76
6. Image Segmentation
• Thresholding• Edge Detection• The Hough transform
Segmentation refers to the operation of partitioning an image into component parts, or into separate objects.

77
Thresholding

78
Edge Detection
• Matlab Function edge• Use the following techniques:
– Prewitt– Roberts– Sobel– Laplacian of Gaussian (‘log’)– Zero-crossings of a laplacian– the Marr-Hildreth method

79
Edge Detection
I=imread('circuit.tif');figure; imshow(I);
BW1 = edge(I,‘log');figure; imshow(BW1);

80
Edge Detection
I=imread('circuit.tif');figure; imshow(I);
BW2 = edge(I, ‘sobel');figure; imshow(BW2);

81
Edge Detection
I=imread('circuit.tif');figure; imshow(I);
BW3 = edge(I, 'canny');figure; imshow(BW3);

82
The Hough transformIf the edge points found by the edge detection methods are SPARSE, the resulting edge image may consist of individual points, rather than straight lines or curves. Thus in order to establish a boundary between the regions, it might be necessary to FIT a LINE to those points.
Line definition for Hough Transform

83
The Hough transformRGB=imread(‘gantrycrane.png’);figure; imshow(RGB);
BW=edge(rgb2gray(RGB),’canny’);figure; imshow(BW);
44
44.5
45
45.5
46
-5000
5000
20
40
60
80
Thetar
Cou
nts
[H,T,R]=hough(BW,’Theta’,[44:0.5:46]);
RGB size is [264 400 3]

84
7. Image Geometry Transformation
• Affine Transform• Projective Transforms• Composite Transform

85
Affine Transform0.5 0 00.5 2 00 0 1
T =
I=imread(‘cameraman.tif’);figure; imshow(I);
T=maketform(‘affine’,[.5 0 0;.5 2 0;0 0 1]);transI = imtransform(I,T);figure, imshow(transI);