
ii 8 M M {IP'II' - ntrs.nasa.gov · NAIN_ ii_ 8 M M {IP'II' 47467-HOI I-UX-O0 RELBET 4.0 ... o...
663
NAIN_ ii_8 M M {IP'II' 47467-HOI I-UX-O0 RELBET 4.0 PROGRAMMER'S MANUAL 23 DECEMBER 1986 PREPARED FOR NATIONAL AERONAUTICS AND SPACE ADMINISTRATION LYNDON B. JOHNSON SPACE CENTER HOUSTON, TEXAS CONTRACT NAS9-17554 {HASA-CI_-171972) RELEI_T 4.0 IECGI_AI_M_.S'S _ANOAL (_IRW Defense- System_ Getup) 671 p CSCL 09B PREPARED BY B. P. HUYSMAN P. S. KWONG L. A. PIENIAZEK G J/6 | N87-18332 Uaclas 43517 SYSTEM DEVELOPMENT DIVISION DEFENSE SYSTEMS GROUP HOUSTON, TEXAS https://ntrs.nasa.gov/search.jsp?R=19870008899 2018-07-27T04:05:51+00:00Z
Transcript of ii 8 M M {IP'II' - ntrs.nasa.gov · NAIN_ ii_ 8 M M {IP'II' 47467-HOI I-UX-O0 RELBET 4.0 ... o...
NAIN_ ii_ 8
M M {IP'II'
47467-HOI I-UX-O0
RELBET 4.0
PROGRAMMER'S MANUAL
23 DECEMBER 1986
PREPARED FOR
NATIONAL AERONAUTICS AND SPACE ADMINISTRATION
LYNDON B. JOHNSON SPACE CENTER
HOUSTON, TEXAS
CONTRACT NAS9-17554
{HASA-CI_-171972) RELEI_T 4.0 IECGI_AI_M_.S'S
_ANOAL (_IRW Defense- System_ Getup) 671 pCSCL 09B
PREPARED BY
B. P. HUYSMAN
P. S. KWONG
L. A. PIENIAZEK
G J/6 |
N87-18332
Uaclas
43517
SYSTEM DEVELOPMENT DIVISIONDEFENSE SYSTEMS GROUP
HOUSTON, TEXAS
https://ntrs.nasa.gov/search.jsp?R=19870008899 2018-07-27T04:05:51+00:00Z

47467-HO11-UX-O0
RELBET 4.0
PROGRAMMER'S MANUAL
23 DECEMBER 1986
PREPARED FOR
NATIONAL AERONAUTICS AND SPACE ADMINISTRATIONLYNDON B. JOHNSON SPACE CENTER
HOUSTON, TEXAS
CONTRACT NAS9-17554
PREPARED BY
B. P. HUYSMAN
P. S. KWONG
L. A. PIENIAZEK
SYSTEM DEVELOPMENT DIVISIONDEFENSE SYSTEMS GROUP
HOUSTON, TEXAS

47467-HO11-UX-O0
RELBET 4.0
PROGRAMMERS MANUAL
December 1986
Prepared for
National Aeronautics and Space Administration
Lyndon B. Johnson Space Center
Houston, Texas
Contract NAS9-17554
Approved by_,__ "L.-A."Plen_ad
Navigation Analysis Section
Approved by __• K. Phillips, Manager
Systems Engineering andAnalysi s Department
System Development Division
TRW Defense Systems GroupHouston, Texas

TABLE OF' COliTEliTS
1.0
Page
INTRODUCTION ..................................................... 1-1
1.1 IDENTIFICATION .............................................. 1-2
1.2 REQUIRED BACKGROUND ......................................... i-3
1.3 HARDWARE/SOFTWARE ENVIRONMENT ............................... 1-4
1.4 TERMINOLOGY AND CONVENTIONS ................................. 1-4
2.0 REFERENCES ....................................................... 2-1
3.0 FUNCTIONAL OVERVIEW .............................................. 3-1
3.1 GENERAL OVERVIEW ............................................ 3-1
3.2 CCT DATA FORMATTING ......................................... 3-3
3.3 DATA PREPARATION ............................................ 3-6
3.4 TRAJECTORY ESTIMATION ....................................... 3-9
3.5 PRODUCTS GENERATION ......................................... 3-11
4.0 DESIGN OVERVIEW .................................................. 4-1
4.1 BASIC PROGRAM STRUCTURE ..................................... 4-1
4.2 RELBET STANDARD FILE FORMATS ................................ 4-2
4.3 INCLUDE FILES ............................................... 4-3
4.4 SUBROUTINE MODULES .......................................... 4-4
4.5 LINPUT INPUT SCHEME ......................................... 4-4
5.0 DIRECTORY STRUCTURE ..............................................
5.1 CONTROL DIRECTORIES .........................................
5.2 PROGRAM DIRECTORIES .........................................
5.3 CONTEXT DIRECTORIES ........................................ .
5.4 UTILITY DIRECTORIES .........................................
4.5.1
4.5.2
4.5.3
4.5.4
4.5.5
4.5.6
File Routines ........................................
Input Manipulation Routines ..........................
Math Routines ........................................
propagation Routines .................................
Data Structure Manipulations .........................
Observation Computation ..............................
5-1
5-1
5-1
5-3
5-3
5-3
5-4
5-4
5-4
5-4
5-5
ii

TABLE OF CONTENTS (Conti nued)
6.0 INSTALLATION AND MAINTENANCE .....................................
6.1 INSTALLATION..., ............................................
6.1.1 Creating a RELBET Master Directory ...................
6.1.2 Reading the Delivery Tape ............................
6.1.3 Tailoring the System to Your Environment ........ ....
6.1.3.1 Graphic Display Device Configuration ..........
6.1.3.2 Tools Configuration ...........................
6.1 MAINTENANCE .................................................
6.2.1
6.2.2
6.2.3
6.2.4
Configuration Control ................................
Recreating Programs ..................................
Modifying Common, Input , Default, etc., Blocks .......
Documentation ............ ............................
Page
6-1
6-1
6-1
6-1
6-2
6-2
6-2
6-2
6-3
6-3
6-3
6-3
APPENDIX I
APPENDIX II
APPENDIX III
APPENDIX IV
FILE FORMATS .........................................
CONTEXT FILES ........................................
SUBROUTINE MANUALS ...................................
SOURCE LISTINGS ......................................
I-1
II-1
III-1
IV-I
iii

1.0 INTRODUCTION
This manual describes the RELBET 4.0 System as implemented on the Hewlett
Packard model 9000 computer system. It is directed toward programmers and
system maintenance personnel. It is intended to serve both as a reference and
as a introductory guide to the software. The body of the manual provides an
overview of major features and indicates where to look for further
information. Full details are left to Appendices. It is recommended that you
first read the body of this manual to familiarize yourself with terminology
and system organization.
This manual is divided into the following sections:
1. INTRODUCTION: Identifies the RELBET System and provides an overview
of the organization and use of the manual. Tells you what to expect.
2. REFERENCES: Provides references to associated documentation. Tells
you where to find additional information.
3. FUNCTIONAL OVERVIEW: Provides a basic functional overview of the
operation of the RELBET System. Explains what programs are supposed
to do.
4. DESIGN DESCRIPTION: Provides an overview of key features of the
design. Explains how things fit together.
5. DIRECTORY STRUCTURE: Describes the directory structure of the
delivery version. Explains where to look for something.
6. INSTALLATION AND NAINTAINCE: Describes procedures for installing the
delivery version on an HP9000 and provides an overview of maintenance
facilities. Explains how to change something.
The following appendices provide extensive details.
Io
II.
FILE FORMATS: Provides details on the formats of the files used by
the System.
CONTEXT FILES: Provides information on the contents of common
block, default values, parameter declarations, type declarations,
and so on. These files are generally associated with the "include"
directive.
1-1

III.
IV.
SUBROUTINE MANUALS: Provides a quick reference to subroutine
function descriptions and associated calling arguments used.
SOURCE LISTINGS: Provides listing of subroutine code suitably
indented to reflect the processing structure.
1.1 IDENTIFICATION
The RELBET System is an integrated collection of computer programs that
support the analysis and post-flight reconstruction of vehicle to vehicle
relative trajectories of two on-orbit free-flying vehicles: the Space Shuttle
Orbiter and some other free-flyer. The UNIVAC 1100 version of the system,
RELBET 2.0, realizes the full production and analysis capability. The HPgO00
version, RELBET 4.0, provides a basic post-flight data production capability
and is a partial implementation of the full analysis version. RELBET 4.0 was
created by carefully tailoring the RELBET analysis software to fit the
production problem and reflects a streamlined production-oriented version that
supports the post-flight reconstruction of relative trajectories and the
generation of standard data products.
In particular the RELBET 4.0 System accepts Orbiter downlist telemetry input
in the form of Computer Compatible Tapes (CCT's) and produces the following
outputs:
o RELBET Ancillary Data Product Tape
o RELBET Ancillary Data Fiche Tape
o SENSOR Program Input Data Tape
o SENSOR Program Environmental Data Tape
o Tables for Reports
It incorporates the following features not available in RELBET 2.0:
o Organization of standard runstreams into shell scripts
o Enhanced user input scheme via linput
o Increased data QA programs
o A text file QA data base
1-2
It lacks the following features available in RELBET 2.0:
o Data and trajectory simulation capabilities
o General purpose automatic editor
o Least Squares Filter
o Residual computation programs
o Binary Data Base Editor
o General interactive control of display processors
o Miscellaneous display processors
The delivered version of RELBET 4.0 is available in magnetic tape media and
consists of the following elements.
o Source code (configured in SCCS format)
o Relocatable subroutine code
o Executable programs
o Program creation directives (makefile's)
o Maintenance tools
o Program and subroutine documentation (for nroff formatting)
Tapes containing sample input and output are also available.
1.2 REQUIRED BACKGROUND
This manual assumes a basic familiarity with UNIX, C, and FORTRAN as
implemented via BOX and ratfor. In addition particular areas may require
additional expertise. This varies depending upon the application and is
summarized in Table 1.2. Parenthetical numbers indicate the applicable
section of standard UNIX manuals. For information on these areas, consult the
references in section 2.0 or a standard UNIX reference.
1-3

Table 1.2. Background Summary
Area
General source code
linput source
Graphics display
Configuration Control
Creating programs
Common blocks
Input blocks
Documentation
Applicable Background
FORTRAN, BOX, ratfor, C, Bourne Shell
C, lex(1), yacc(1)
DISSPLA
sccs(1)
make(l)
mtf utilities
mtf utilities
nroff(1), man(7), cstrip, txman, blist,clist, mtf utilities
1.3 HARDWARE/SOFTWAREENVIRONMENT
RELBET 4.0 assumes the following hardware configuration:
o Hewlett Packard 9000 Computer model 540
o Hewlett Packard 7935 440 Megabyte disk drives
o Hewlett Packard 150 computers as terminals
o Hewlett Packard 9872B plotter for plots
o Hewlett Packard 7970 g track 1600 bpi tape drive.
RELBET 4.0 assumes the following software environment:
o RELBET 4.0
o HPUX operating system version 5.1
o DISSPLA Graphics Library.
1.4 TERMINOLOGY AND CONVENTIONS
Terms are generally used in the sense of UNIX. In the following, program
refers to an executable object. When a distinction between an interpreted
shell program and a compiled and linked program is needed, the terms shell
program or binary program are used respectively. The term processor is also
used to mean a binary program. The term routine means a C function or a
I-4

FORTRAN routine. Routines correspond to source and relocatable code. They
are separately compiled but not linked. Thus there is a distinction between
driver routines and executable programs that results from linking. The terms
dlrectory and flle have the same meaning as in UNIX. The term module is used
in a descriptive sense to indicate a set of related routines. The term
package is also used descriptively. It indicates a set of related routines,
data structures, or even programs. The term context is used to indicate
information related to variables or subroutines defined elsewhere, as well as
sizing, format, and defined type information.
The following lexical conventions are used:
Program and File Names:
text discussion.
Bold font denotes program and file name within
Terminal Display: Terminal screen print examples are always indented and
separated from the discussion. Bo]d font denotes user input and regular
font denotes program output. Two lines consisting of a single indented
colon indicate an omission of several lines of text. The elipsis (...)
indicates a omission of text on a given line.
Flow charts use the following symbols:
--_ Processor Activity
Q Binary File
Text File
Displ ay, e.g., Pri nter Plot
User Knowl edge
I-5

2.0 REFERENCES
The following documentation is applicable to the RELBET 4.0. and the RELBET
System in general.
I. "Space Transportation System Post-flight On-orbit Relative Trajectory
and Ancil Iary Data Products," TRW Report 39107-HO11-UX-O0,
B. P. Huysman, L. A. Pieniazek, 1983.
2. "RELBET Product Description (Update/May 1985)", TRW Memo 85:W482.1-57,
B. P. Huysman, L. A. Pieniazek, 15 May 1985.
3. "Programming Standards for FORTRAN Deliverables," TRW Memo 82:W582.1-
16, D. K. Phillips, 10 February 1982.
4. "RELBET Software Level A Requirements," TRW Report 39107-HOO3-UX-O0,
L. A. Pieniazek, 18 May 1982.
5. "RELBET Software Level B Requirements," TRW Report 39107-HOO5-UX-O0,
B. P. Huysman, L. A. Pieniazek, 8 November 1982.
6. "Rendezvous BET Program, LRBET3," JSC-18638, W. M. Lear, December
1982.
7. "STAR Version 1.6 User's Guide," TRW Memo 83:W482.8-13, S. W. Strom,
3 May 1984.
8. "Preliminary RELBET User's Manual," TRW Memo 83:W482.8-24, L. A.
Pieniazek, 21 July 1983.
9. "RELBET Engineering Manual," TRW Memo 84:W482.8-125, L. D. Erdman, 15
October 1984.
10. "RELBET Programmer's Manual," TRW Memo 84:482.8-130, L. Morris, 26
October 1984.
11. "RELBET User's Manual Update," TRW Memo 85:W482.8-24, L. A. Pieniazek,
13 March 1985.
12. "HP General File Format (GFF) User's Guide," TRW Report 39107-HO21-UX-
00, D. G.Campbell, 14 December 1984.
13. "RELBET User's Manual Change Pages," TRW Memo 85:W482.8-106, P. S.
Kwong, 12 November 1985.
14. "RELBET Programmer's Manual Change Pages," TRW Memo 85:W482.8-I07, P.
S. Kwong, 12 November 1985.
15. "BOX System User's Guide," TRW Report 47467-HOO2-UX-O0, W. Pace and D.
Poritz, February 1986.
2-1

16. "Preliminary HP RELBETStreamlining Level A Description," TRWMemo86:W482.8-19, L. A. Pieniazek, 21 May1986.
17. "SENSORTape Production Manual," TRWMemo85.W482.1-60, J. Knoedler, 3June 1986.
18. "RELBET4.0 User's Guide," TRWReport 47467-HO10-UX-O0,B. P. Huysmanet al., December1986.
19. "RELBET4.0 Programmer's Manual," TRWReport 47467-HO11-UX-O0,P. S.Kwongand L. A. Pieniazek, December1986.
20. "HP-UXReference," Hewlett-Packard Company,1985.
21. "HP-UXConcepts and Tutorials," Hewlett-Packard Company,1985.
22. "The C Programming Language," B. W. Kernighan and D. M. Ritchie,Prentice-Hail, inc., i978.
23. "Automated CodeGenerator for C HeaderFiles," TRWMemo86:W482.8-25,L. A. Pieniazek, 8 October 1986.
24. "Automated Software Documentation Utility," TRWMemo86:W482.8-28, L.A. Pieniazek, 27 October 1986.
25. "Interface Control Documentfor ORDCComputer Compatible Tapes," CSC-1921, G. E. Habacek/CSC,February 1984.
26. "HP General File Format (GFF) User's Guide," TRW39107-HO21-UX-O0,D.
Campbell, 14 December1984.
27. "DISSPLA User's Manual," Integrated Software Systems Corporation,1981.
2-2

3.0 FUNCTIONAL DESCRIPTION
This section presents a functional description of the execution of RELBET
4.0. The description is at the level of major processing functions and will
identify the various programs and "shell scripts" or run streams which one
executes to accomplish each function. The overall process is first described
and then the major steps examined in more detail. Section 5.0 of the User's
Manual provides a detailed example of the process. The following discussion
makes parenthetical references to the appropriate subsection of Section 5.0.
3.1 GENERAL OVERVIEW
The RELBET production procedure consists of five basics steps:
o Data Collection
o Input Data Formatting
o Input Data Preparation
o Trajectory Estimation
o Generation and QA of Output Products.
Figure 3.1.1 summarizes this activity.
The activity begins with the collection of pertinent mission requirements and
parameters. These are used to request post-flight telemetry products and to
update a data base of standard program inputs. This preparation activity is
primarily manual and does not utilize any of the RELBET programs.
The first actual processing phase begins with the receipt of telemetry data.
The downlist telemetry comes in the form of Computer Compatible Tapes (CCT's).
Various RELBET programs are used to reformat the CCT into files accessible to
the various RELBET processors. These files contain information such as
vehicle attitude data, relative observation data, and sensed velocity data.
This step also transforms observation data into the RELBET reference frames
and edits data according to the onboard data good flags.
Various specialized quality assurance (QA) programs support the next
processing phase, data preparation. During this activity one checks the
3-1

fIIII!IIIII--O
II"
, ,, { )I [LOADS GENERIC
I FLIGHT ii RELDET
1 _ KNOWLEDGEi t
t
(--)QUALITY
] F°_TII CCT
1
...........I=It
1
(.-)DATA
QUALITY• EVENTS
1(--)ICHOWLEDGE
(DOWNLIST OPTION)
SOLUTION
QUALITY
(REFINED OPTION)
TUNING\: MODELING \
e FINE /
QUALITY /
i I
DATA COLLECTION
DATA FORMATTING
DATAPREPARATION
ESTIMATETRAJECTORY
I CONSTRUCTI
SENSOR I
TAPES I
I
PRODUCTGENERATION
Figure 3.l.l. RELBET Production Overview
3-2

overall quality of the downlist for basic telemetry difficulties such as
dropouts or invalid data. If the number of difficulties are excessive, a
request for replacement CCT's may be made. This phase further examines the
"raw" telemetry data and edits gross outliers. Precise times for pertinent
events such as attitude maneuvers or tracking intervals are also identified.
Such information is useful in resolving anomalies that may occur in subsequent
processing. At the completion of this phase, one has determined that the
input data are usable and and has generated information for later review and
analysis.
The next phase deals with estimating the relative trajectory. One also gives
the quality and consistancy of the data greater scrutiny during this phase.
During this process a Kalman filter processes the telemetry. The output of
the filter is reviewed to detect various anomalies. These anomalies are then
either corrected or accounted for by correlating them with specific events
that are known to cause problems. When satisfactory performance with the
Kalman filter is obtained, its solution estimates are processed with a
"smoother" program to obtain a "Best Estimate of the Relative Trajectory"
(RELBET).
During the final processing phase the required output products are assembled
from the various refined estimates and downlist telemetry. This activity is
supported by a variety of computational, formatting and quality assurance
programs.
3.2 CCT DATA FORMATTING
Before it can be used, the input telemetry data must be checked and
reformatted into a format accessible by the RELBET processors.
The major source of input data for the RELBET process is the downlist
telemetry contained in the CGO11X CCT (Computer Compatible Tape). (CGO11X is
a particular shuttle data product generated for each mission.) In general the
periods of interest are long enough that several CCT's are required. These
must be reformatted and merged into files with the format used by the RELBET
processors. Figure 3.2.1 depicts this process. The Q_wnfmt program strips
3-3

I
0I..I-
C%J
5..."3
,r-.
3-4

required parameters from the CCT, checks them for validity, and generates time
ordered binary files containing properly scaled parameters (5.2.1). In doing
this it identifies and extracts the homogeneous data buffer created by the
onboard rendezvous navigation program. This buffer is generated at the
navigation cycle frequency (about a quarter of a Hertz) and downlisted
asynchronously at a frequency of about one Hertz. Note that several files may
be produced from single CCT, each file with its particular contents. The
following files are required for later processing:
o Attitude file: contains selected quaternions and is used to determine
nrhit_r atfit,l_ Th_ fA11n.W4nn,,,_ A4e_,,ee4^n uses _h^ _kk ....;_;^_....... --v...------. o.ew , vi i _l@_Ue@ iVll bll_ UUUl _Y IQblVII
"AT[" for this file.
o Observation file: contains relative observations. The following
discussion uses the abbreviation "OBS" for this file.
o Sensed velocity file: contains selected sensed velocities for use in
propagating the orbiter through burns. The following discussion uses
the abbreviation "SVEL" for this file.
o Vehicle ephemeris files: contain on-board state estimates that are
used primarily for analysis and to obtain initial estimates. The
following discussion uses the abbreviations "OEPH" and "TEPH"
respectively for the orbiter and targer ephemerides.
o SENSOR Information File: contains miscellaneous data required for
generating the SENSOR tapes.
Several CCT's are usually needed to encompass an entire mission segment and
dwnfmt handles only one CCT at a time. Thus the telemetry for a mission
segment usually involves multiple telemetry files for each of the above
types. Subsequent processors expect only one file of each type. Thus it is
neccessary to merge the various files together. The shell program runjbfcom
will merge any number of files together (5.2.2).
The onboard systems associate a data good flag with each observation. If this
flag indicates that the current observation is bad then the onboard filter
does not process the datum. The shell program run obsedit edits the OBS file
for such data (5.2.3). This prevents the RELBET filters from processing bad
data. The radar angles as downlisted are in the roll-pitch frame used for
3-5

crew display. The shell program run__rptost converts the roll-pitch angles to
shaft-trunnion angles (5.2.4). The latter are preffered for filtering because
they theorectically exhibit statistically independent biases.
At the conclusion of this processing phase the CCT's have been formatted into
files required by the subsequent processors.
3.3 DATA PREPARATION
The input data formatting process gets the telemetry contained in the CCT's
into the RELBET system. Before processing the raw telemetry with the filters
or generating output products further processing is neccessary. Figure 3.3.1
depicts this process. It involves assessing the data coverage, editing bad
data points, and identifying events and anomalies that are not detected while
stripping the data. One then saves all this information into the event data
base.
Several shell programs help in this process. The shell script run__qacover
summarizes data coverage of all the data types on the downlisted observation,
attitude, and sensed velocity files (5.3.1). These files are analyzed to
determine the quality of the CCT's. If coverage is not complete, the Input
Data Formatting must be repeated with a newly requested CCT. If it is
complete, all problems associated with the downlink of the CCT's have been
identified and handled.
The execution of the shell script run_qadata identifies events in the data to
help in assessing filter performance later in the processing steps by
providing text files and some data files in gff format which can be analyzed
or plotted (5.3.2). The shell program run__noise runs the noise analysis
procedure. It computes noise values for each observation type and enters this
value into the proper slot of the observation file (5.3.3). The Kalman filter
needs the noise value for its processing. The program run noise also
generates text files that summarize the noise information.
One then uses the text files output from ruLqadata to edit the attitude,
sensed velocity, and observation files for bad data. Several shell programs
facillitate this editing process. The UNIX sort program merges the text files
3-6

e
t-O
°r-,
r_s_r_
s_
r_
c_
Q.JS_
1.1_
3-7

output by these programs into the event data base. From the event data base,
the shell program run search (5.3.5) extracts information relating to possible
difficulties. A knowledgeable engineer can review this information and
identify time intervals during which files should be edited. The shell
program run_imespan aids in preparing the time intervals (5.3.6). One uses
the program filedlt to edit the desired files. Two shell programs, run
edltradar and run editst help in editing the radar and star tracker data.
At the conclusion of the data preparation phase, one has edited the input data
and created a data base which will be useful for correlating problems during
a particular time period. The various gff files may be plotted for more
detailed analysis and review (5.3.7).
Table 3.3.1 summarizes the various QA programs.
Table 3.3.1. QA Programs
Name Text File Gff File
qaatt
qaranjmp
qastar
qasv
qanois
identifies attitude manueversand bad points on the attitudefile
identifies inconsistencies
in range and range rate todetect sudden biases or
equipment reconfiguration
identifies false targets
that the star tracker mayhave locked onto
identifies burns as jumps in
the magnitudes of the sensed
acceleration computed from the
sensed velocity and bad data
documents the noise for each
observation type
angular momenta and
magnitudes between con-secutive attitudes
star file containing azi-
muth, elevation, and anglefor each star trackerobservation
sensed acceleration file
noise files for each
observation
3-8

3.4 TR/IJECTORY ESTIMATION
Up until now the different input items have been looked at more or less
individually. During the next processing phase they are combined together to
obtain a best Kalman estimate. Figure 3.4.1 depicts this process.
The program sfilt uses a Kalman filter to process the various observation
information and the quality of the estimate is assessed (5.4.3). The programs
slnZrl, cmpZs9, and rlvsrl aid this assessment. The display programs qplot,
xqdlsp, and 9disp help to investigate the contents of gff files generated by
._^ v_1.., filter. '........ ' .......•,,y_,,ura, there w111 be various spikes and V1Olatlons of
different success criteria (e.g., 3-sigma residuals, excessive Ka!man edits,
etc.). These are manually correlated with possible causes and corrective
adjustments are effected when possible. This filter-evaluate-adjust process
continues until the user decides that no further refinements are merited.
At the conclusion of this phase, the best Kalman estimate of relative
trajectory has been obtained.
Kalman estimates tend to contain unrealistic spikes and also reflect
uncertainties due to looking at only one side of the data arc. A smoother
algorithm is used to remove the spikes and improve estimates by considering
both sides of the data arc. The smoother program smooth processes the results
of the best Kalman estimate. The results of this process are compared with
the Kalman estimate with the aid of the programs sln2rl, _2sg , and rlvsrl
and the various display programs. If there is a large discrepancy between the
smoothed and Kalman estimates further adjustments may be neccessary. When a
satisfactory smoothed estimate is obtained the program slnZrl extracts the
relative trajectory information from the smoothed solution.
At the conclusion of this processing phase the best estimate of relative
trajectory has been obtained.
3-9

II
r-I
C SIGMARATIOS
t
IT SMOOTH
EPH M
-TI
0!I
t
1
cM,2soIiRLVSLSLNERL
SFILT
_LV
Ts I
I
tI so,=io,,J
C KALHANEDITS
t
I I EXCESSIVE I
CMP2SGRLVSL
"_ C DEXTEANTBAsE_
IY
• ! CORRELATEi
r
SLN2RL
ADJUSTHENTS
Figure 3.4.1. Trajectory Estimation
3-10

3.5 PRODUCTS GENERATION
When suitable quality telemetry data and trajectory estimates have been
obtained, the output ancillary products are generated. Figure 3.5.1 depicts
the process for the Ancillary Data Products. The program pro(Ix is used to
compute the required parameters (5.5.2). The program qatape is used to read
the product tape and perform a check of its contents (5.5.3).
Other formatting programs such as stop, fiche, and mktape are available for
generating other products such as the SENSOR tapes and microfiche print.
Figure 3.5.2 depicts the process for creating the SENSOR tapes: the SIT
kOL,wOUR _fmpu_ Tape) and the _Lm I_LNbUR Environment Tape). The final report
is obtained by manually assembling various plots and tables obtained in
previous processing (5.5.5).
RELBET processing is done when all identified products have been delivered.
3-11

i!
I ANCILLARY
PRODUCTS
COMPUTA-TION
PRINT]
PRODX
FICH
MKTAPE
QATAPE
i
J
°y
QATAPE
C DATABASE
ASSEMBLE
DOCUMENT
Figure 3.5.1. Ancillary Product Assembly
3-12

iI
I COMBINEEPHEMSI
SENSORTAPE OUTPUTPROGRAM
STOP
ONLY IF RELATIVEEPHEMERIS NOTAVAILABLE
Figure 3.5.2. SENSOR Tape Construction
3-13

4.0 DESIGN OVERVIEW
The RELBET system was envisioned as a set of general purpose analysis tools
that would be flexible, easily integrated, and easily maintained. The result
is a design that stresses modularity, functionality, and commonality. Some
key feaures of the design and implementation are:
o Isolation of logic and data to well defined routines or blocks
o Data structuring via blocks of functionally related variables
o Extensive use of include directives to provide consistant context
o A common library of utility routines organized in functional modules
o A standardized binary file format that faci!!itates interprogram
interfaces
o A standardized input scheme (linput) that reflects data structuring.
In the following we expand the above and point out other general features that
might not be immediately evident from reading the source code or the
appendices.
4.1 BASIC PROGRAMSTRUCTURE
The RELBET System includes both binary and shell programs. The main criterion
for allocating whether logic occurs in a shell or binary program is that
binary programs should be both simple and functionally specific. Shell
scripts are used to tie together programs for more complicated applications.
Thus instead of providing a single program with multiple user options, say
different data type QA options, separate programs for each option are
provided. This approach has two major benefits. First the logic of a single
program is usually substantially reduced since it need only deal with a
particular case. Secondly the user is not restricted to the logic in an
executive when combining the various options together.
Thus one may identify two levels on which the programs are put together, i.e.,
integrated: that of shell programs and that of binary programs. The shell
programs integrate binary programs together and control specific applications
such as data stripping or product generation. The shell programs deal with
4-1

binary programs and particular files. At this level one mayview the files as
information objects and the binary programs as functions that change or filter
the files. Input text files provide the detailed user interface.
The majority of the compiled software for RELBET is written in HP FORTRAN 77
using BOX. The remaining is written in C or in FORTRAN using ratfor. These
programs make use of a library of utility routine modules. This means that the
programs share many routines and exhibit a large commonality in techniques.
Furthermore logic is generally isolated to a unique location rather that
duplicated in many locations. Data structuring and access is with a standard
set of blocks of functionally related variables and parameters. These blocks
are maintained in their separate files and are accessed with the compiler
include directive.
The binary programs generally consist of a driver and some specific routines
that access the standard utility routine library. To a large extent, common
blocks and context files pass information between the utility routines. To
use a metaphor, the utility modules provide interchangeable components, the
drivers provide a framework, and the comon and context files provide the
glue. Note that a given program generally does not use all modules although
some modules are heavily used, e.g., Files and Input. Also note that some
modules invoke routines from other modules so that there is a hierarchal
dependency among the modules.
4.2 RELBET STANDARD FILE FORMATS
The main method of passing large amounts of data between RELBET processors is
through the use of binary files with a standardized formats that are generi-
cally referred to as the RELBET format. This provides a standard consistant
mechanism for interprogram communication. There are actually two basic
formats: the gff (general format file), and the gb (general binary) format.
Both consist of a fixed size header record followed by data records. They are
more or less equivalent with the major differences envolving the use of
certain header parameters and the size of allowable records. Appendix I
discusses the file formats in detail. Routines in the Files directory provide
access to them. The files in the Parameters directory and the C header file
4-2

Gbfiles.h provide information on file related data structures. Refer to
Appendix I for additional information on specific 9ff file formats and to
Appendix III for information on the low level routines.
WARNING: In order to maintain consistancy and simplify maintenance, a
programmer should not access files directly.
NOTE: RELBET processors are not sensitive to the dictionary of frame
variables found on the file headers nor do they necessarily place the GFF id
in the header as do some versions of gff routines.
4.3 INCLUDE FILES
A standard set of files provide context, sizing, and design dependent
parameters such as type declarations, data flag values, and file formats. The
directory Parammters contains FORTRAN parameter statement blocks, and the
directory Linklib provides C header or ".h" files. The source uses "include"
statements to access them. Appendix II provides details.
The main vehicle for passing information between the various subroutines
making up FORTRAN and ratfor programs is through FORTRAN common. The common
blocks are contained in the directory Ntfcommon and include dimension, type
and commented definitions for each variable in the named common. Note that
the MTF utilities are available for their maintenance.
Many of the common blocks have defaults for some of the variables. These are
provided using FORTRAN data statements associated with each named common.
These data blocks appear in the block data subroutines associated with the
various programs and are in the directory Ntfdefault.
Many of the common blocks have user input available for some of the
variables. The common inputs are accessed by the user though a set of C
language routines in the directory Llnput. The interface calls between the
FORTRAN and linput routines are done on a variable by variable basis, and the
includes associated with the interface are under the directory Ntfinput.
4-3

The directory Parameters contains various "parameter" declarations. These
deal primarily with FORTRAN and ratfor file I/O routines. These versions are
basically copies of one another with appropriate changes.
The C language routines pass information to each other by the use of the data
structures and typedefs. The definitions of these objects are normally found
in header files (.h files) which are included in the C routines and are listed
under Linklib.
All the include files are contained in Appendix II.
4.4 SUBROUTINE MODULES
Modules group together routines with related functions such as coordinate
transformations or matrix operations. Routines unique to a given program
receive their own module. In general, a module is shared by many programs.
However, a particular piece of logic is isolated to a single routine. The
directories reflect the modular organization. Section 5.0 provides an
overview of the directories and the modules. Appendix III provides a synopsis
of the contents of the modules and the routines. It also provides a cross
reference between identifiers and modules. Appendix IV provides source code.
4.5 LINPUT INPUT SCHEME"
The linput input scheme provides a standard user interface. The mtf utility
mtfuser generates blocks of input parameters in the Mtfinput directory from an
associated mtf text file. The "xx" routines provide the interface between the
input text and the common blocks.
4-4

5.0 DIRECTORY STRUCTURE
The RELBET directory hierarchy structure is quite simple: a single master
directory with about 40 subdirectories. Each of these subdirectories contains
a group of closely related files. The basic benefit of this approach is that
it greatly simplifies relative pathnames for includes. For the purpose of
discussion, however, it is convenient to group directories as to their
contents or function. The directories accordingly fall into the following
major groups:
o Control Directories that contain executables and input data
o Program Directories that contain program unique code
o Context Directories that contain data structure information such as
common blocks and parameters
o Utility Directories that contain general purpose utility routines
5.1 CONTROL DIRECTORIES
These directories contain the executable binary programs, shell scripts, and
program maintenance directives and utilities.
Control
Make
Test
Tools
Manual
Pmanual
Executable and production shell scripts
Make directives used to recreate executables
Sample inputs and shell scripts
Maintenance tools
Program user manuals
Routine Manuals
5.2 PROGRAM DIRECTORIES
Table 5.1 lists those directories associated with particular programs or
executable objects. In general a program is matched with the directory
containing its driver and other routines specific to that application. Such
directories are referred to as program directories.
5-1

Table 5.1. ProgramDirectories
Directory
Downfor
Filter
Fich
Fman
Mktape
Noisanal
Numdis
Plot
Product
Qatape
Prg)ram Name
dwnfmt
rptost
sfilt
smooth
fiche
cmp2sg
eph2relfiledit
gbfcommkinit
obsnois
qaatt
qacoverqanois
qaranjmpqastar
qasvrdwt
read set
read-sit
rlvs-_l
search
slnZrl
stop
mktape
ddnois
gdisp
xcmpar
xqdisp
ascale
pl otx
prodx
qatape
Description
Downlist Formatter
Roll/pitch to shaft trunnionobservation convention
Kalman filer
Smoothing Filter
Create microfiche
Compare state difference to sigma
Convert ephemerides to relative trajectoryFile editor
Combine gff files
Make the init input blockPlace noise data on obs file
QA the attitude file
QA the data coverageQA the data noise
QA the range observationsQA the star tracker obs
QA the sensed velocityRead file then write file
Read SET file and print
Read SIT file and print
Compare relative trajectory filesExtract data from event data base
Strip relative trajectory from solution file
Create SENSOR output tapes
Create output UNIVAC tape
Compute obs data noise
General gff display
Compare two ephermeris files
State/Attitude Parameter Di splay
Auto scale
Graphic display of gff files
Special product generation
QA special product tape
5-2

5.3 CONTEXT DIRECTORIES
These directories contain text files which are "included" in FORTRAN or C
language routine by the compiler to provide context information and data
interfaces.
Mtf
Mtfcommon
Mtfdefaul t
Mtfinput
Parameters
Linklib
MTF master textfiles
Common declarations
Data statements for common blocks
linput interface calls for user inputs into common
blocks
FORTRAN and ratfor parameter declarations
Header (.h) files used by C routines
5.4 UTILITY DIRECTORIES
These directories comprise a library of general purpose utility routines.
They are used by various programs as opposed to the Program Directories whose
routines are not required by any other program. These directories generally
form packages of related routines and are accordingly synonomous with modules.
5.4.1 File Routines
Two sets of gff file routines are provided as well as a set of FORTRAN
interfaces to the gff routines are used to actually invoke the gff routines.
Gff
Gbfile
Files
FORTRAN routines modeled after the orignal gff
routines
C routines allowing more general access to creating
and processing of binary files used by Downfor and
Fman processors
The gff interface routines used by the programs
Kalman, Notsanal, Numdts, Plot, Product, and Smooth
5-3

5.4.2 Input Manipulation Routines
These directories are involved in the process of reading and preparing user
input for use by the processors.
Linput
Lists
Input
Prompts
The C routines which form the linput input scheme and
the interfaces with FORTRAN
The C routines which manipulate the data structures
used by linput
FORTRAN routines for preliminary processing and
display of inputs received through linput
FORTRAN routines related to menu generation
5.4.3 Math Routlnes
These directories provide general mathematical tools.
Coordinate Coordinate transformation routines
Interpolate Interpolation routines
Math Trig, matrix, vector, and quaternion routines
5.4.4 Propagation Routines
These directories contain routines for propagating vehicle trajectories.
Celestial
Force
Propagate
Compute positions of celestial objects
Compute forces on an orbiting body
Routines to initialize and drive the
process
propagation
5.4.5 Data Structure Manipulations
The routines in these directories manipulate various types of data or data
structures. They include C and FORTRAN routines.
5-4

Charutil
Dsputil
Message
Stacks
Time
Manipulate FORTRAN character strings
Gff file header frame data displays
Provide general display of character strings related
to warnings and other status messages
Routines to manipulate stack data structures
Routines for conversion and manipulation of time data
5.4.6 Observation Computation
This directory contains routines related to observation processing.
Kalman and Smoother filter programs need these routines.
Obs Observation computation routines
The
5-5

6.0 INSTALLATION AND MAINTENANCE
The delivery tape is a tape archival of a configured RELBET directory
installed on the TRW Houston System Services HPgO00 system configuration.
This installation reflects the system environment described in section 1.3,
Hardware�Software Environment, of this manual. The installation is geared to
maintaining configuration control and reflects a single user owner of all
files. The maintenance is supported by a variety of standard UNIX and TRW
utilities.
6.1 INSTALLATION
To install the delivery tape onto your system, you must read the delivery tape
into a directory with a proper user environment. Depending on your needs and
your system environment you may also need to reconfigure the user environment
and device access.
6.1,1 Crea¢t n_ a RELBET Raster Ot rectory
All files on the tape are owned by user Relbet be]onging to group Relbet. The
examples in the User's Manual and all the shell programs assume that the
directory /users/Relbet/Master/Control is included in the environment variable
PATH. To use the maintenance tool include /users/Relbet/Naster/Tools/Abs in
PATH. The login shell should be sh.
6.1.2 Reading the Deltver_f Tape
The delivery tape is a 1600 bpi 9 track tape created from a configured Master
RELBET directory using the UNIX tape archival utility tar. It was created
with the command
tar cvf /dev/tapeO *
6-1

while in the master RELBET directory. You can use a procedure similar to the
following to to read the tape into your master own RELBET directory.
cd luserslRelbetlMaster
#assign tape
mt -t IdevltapeO few
tar xvf /dev/tapeO
#release tape
#rewind
#read tape
6.1.3 Tatlortn 9 the System to Your Environment
The delivered version may not reflect your system environment so that it may
be neccessary to make a few alterations before proceeding. The most likely
candidates are display devices and maintenance tools.
6.1.3.1 Graphic Otsplay Device Configuration
The delivery version of the graphics display program plotx uses the DISSPLA
graphics library with devices configured for the HP150 terminals and the
HP9872B plotter. The make directives assume the DISSPLA library is contained
in the directory lusrlliblDisspla.
6.1.3.2 Tools Configuration
The directory ToolslAbs contains links to executables for various code
generation and documentation utilities. The source for these is found under
the directories in Tools. Note that this directory uses multiple links to
executables and documentation. You may need to reconfigure the line and page
length controls for the text formatters depending upon your line printer.
These controls are mostly found as arguements in shell scripts such as the f_
programs.
6-2

6.2 MAINTENANCE
The RELBET System was designed to be built and maintained using a variety of
UNIX and TRW developed tools. The following provides an overview of their
application. Look in Tools/Manuals for further information.
6.2.1 Configuration Control
The system is delivered with all source under sccs cntrol with a base version
of 4.1. The tools under the Tools directory are also under sccs control, but
with a base version of 1.1. As delivered only the system owner (user Relbet)
can alter these files with programs such as delta. This scheme is designed to
support a strict configuration control.
6.2.2 Recreatln 9 Programs
The directory Make contains directives for the UNIX makeprogram.
new executable run make with the appropriate directives.
To create a
6,2,3 _difytn 9 Comon. Input. Default, etc., Blocks
The system was designed to use the MTF (Master Text File) utilities to create
and maintain information associated with blocks of related variables. To
alter one of these objects, modify the associated MTF file, found in Mtf, and
run the appropriate reformatting program:
mtf blk
mtf_npt
mtf data
mtf user
generates FORTRAN common code
generates linput invocations for input
generates FORTRAN data statements
generates user manual entries
Refer to the documentation section below for how to generate cross references.
6-3

6.2.4 Documentation
Listings may be obtained with the shell program src]ist. Note that this shell
uses the program bxp rather than the standard bllst program which expands all
includes.
Manual entries are generally available in the 1_man format for reformatting
into the nroff/man format. Program manuals must be manually produced.
Routine manuals may be automatically generated using the programs bcmanuals,
boxstrip and cstrlp. Cross references may generated with procedures like
those outlined in the shell scripts mtfcmntoc and mtfnpttoc.
6-4

APPENDIX I
FILE FOPJ_J_TS
I-i

TABLE OF CONTENTS
1.0 INTRODUCTION .....................................................
Page
I-1
2.0 EXTERNAL FILES ...................................................
2.1 DOWNLIST CCT ................................................
2.2 RELBET PRODUCT FILE .................................... ,....
2.2.1
2.2.2
2.2.3
SENSOR
SENSOR
Binary Data Products File ............................
Output Contents ......................................
Parameter Groups .....................................
INPUT TAPE ...........................................
ENVIRONMENT TAPE (SET) ...............................
I-i
I-I
I-2
I-2
I-5
I-5
i-II
1-14
3.0 INTERNAL FILES ...................................................
3.1 GENERAL FORMAT ..............................................
3.2
3.3
3.4
3.5
3.6
3.7
3.8
3.9
3.10
3.11
3.12
3.13
3.14
3.15
3.1.1 Format Compatibility .................................
3.1.2 Overall File Format ..................................
3.1.3 RELBET Data Frame Formats ............................
3.1.4 File I/O Packet ......................................
3.1.5 File Header Format ...................................
3.1.6 Dictionary Format ....................................
SENSED VELOCITY FILE ........................................
ATTITUDE FILE ....................... ........................
OBSERVATION FILE ............................................
EPHEMERIS FILE ..............................................
IMU ATTITUDE FILE ...........................................
IMU SENSED VELOCITY FILE ....................................
SOLUTION FILE ...............................................
RELATIVE TRAJECTORY FILE ....................................
PLOT DISPLAY FILES .........................................
COAS MATRIX FILE ...........................................
STAR TRACKER MATRIX FILE ...................................
SUPPLEMENTARY SIT FILE .....................................
ENVIRONMENT FILE ...........................................
QA FILES ...................................................
1-17
1-17
1-17
1-17
1-18
1-19
1-22
1-23
1-25
1-25
1-25
1-26
1-26
1-27
1-27
1-28
1-28
1-30
1-30
1-30
1-31
1-31
I-ii

TABLE OF CONTENTS (Continued)
3-16 SENSOR FILES ...............................................
Page
1-32
4.0 TEXT FILES ....................................................... 1-35
5.0 DATA BASE FILES ................................................... 1-36
REFERENCES ....................................................... 1-37
I-iii

1.0 INTRODUCTION
The RELBET System uses a variety of files for interprogram communication.
files may be grouped into four categories:
o External data files that provide system input or output
o Internal files used by the System to communicate between programs
o Display files generated by the System
o Data base files.
The
2.0 EXTERNAL FILES
These are files with specific formats and are treated as foreign by the RELBET
System. They include input and product data files.
INPUT
OUTPUT
Downlist CCTs
RELBET Product TapeRELBET Microfiche Text
SENSOR Input Tape (SIT)
SENSOR Environment Tape (SET)
2.1 DOWNLIST CCT
The Downlist File contains on-orbit observation data and time-tags associated
with various on-board sensors. By collecting and reformatting these data
RELBET constructs files for sensed velocities, attitudes and observations as
well as ephemerides for the Orbiter and target vehicle. The format of this
tape is described in the CCT Interface Control Document, reference 1 at the
end of the Appendix.
I-1

2.2 RELBET PRODUCT FILE
The program prodx generates the RELBET Special Products File. It utilizes
trajectory and attitude information from input standard format files to
produce data product files containing various parameters over a specified time
interval. Output includes print describing the input and processing status.
Options include tape, binary, and formatted data product files.
2,2.1 Btnar7 Data Products File
The user has the option to generate a binary data products file corresponding
to the RELBET Ancillary Data Products described in Reference 2 at the end of
this Appendix. This file is tape or mass storage according to the user
assignment. This multi-record file has the following general format:
First Record:
Second Record:
Succeeding Records:
END OF FILE
Identifier record
Dictionary record
UNIVAC binary data records
The first record has a fixed length of 26 UNIVAC single precision words. The
dictionary and data records all have the same length; however, this length
varies depending on the particular parameters desired. Table 2.2.1 depicts
the overall file format.
The file identifier record provides the user with information to identify the
file contents. The format is shown in Table 2.2.2. The first twelve (12)
words constitute a generic identifier message. The thirteenth word is the
alphabetic "SPEC" which identifies the data as a special BET product. The
next twelve integer words specify the time period in Greenwich Mean Time (GMT)
covered by the data records. The last word is an integer defining the number
of parameters in the dictionary.
I-2

Table 2.2.1. File Format
RECORD
1
2
3
C
INFORMATION
Tape Identifier
Parameter Dictionary
Data
Monotonically
IncreasingTime
Data
I-3

Table 2.2.2. File Identifier Record Format
SINGLE
WORD
NUMBER
1
m
i2
13
14
15
16
17
18
19
20
25
26
DEFINITION
48 character
identifier messageflight no., dataetc.
SPEC
tape start GMT(first data record)
tape stop GMT(last data record)
number of parameters
in dictionary
YR
MO
DAY
HR
MIN
SEC
YR
SEC
TYPE
alphabetic (single)
alphabetic (single)
integer (single)
integer (single)
integer (single)
I-4

The dictionary record format shown in Table 2.2.3 informs the user of the
available parameters and their relative location on the data records. The
first word is an integer defining the number of parameters in the
dictionary. The remaining N alphabetic words identify the relative locationof the value of the parameter.
The data record format shown in Table 2.2.4 provides the double precision
parameter data in a format where the value for a parameter is in the
corresponding word location of that parameter symbol in the dictionary
record. Note that the first word constitutes a last record flag.
2.2.2 Output Contents
A formatted Data Products file will be generated at user option. This file
contains the same parameters at the same frequency as the binary data products
file. It consists of a dictionary description followed by displays of each
output record.
2.2.3 Parameter Groups
The ancillary parameters are divided into 17 groups with the option to include
or omit each group. These parameter groups are described in Table 2.2.5.
Note that the continuation flag (entry 1, dictionary name CONTINUE) is always
included. Although any subset of these 17 groups may be selected, a fatal
error will result if none are chosen or sufficient input information to
compute parameters is not provided.
I-5

Table 2.2.3. Dictionary Record Format
DOUBLE
WORD
NUMBER
1
2
3
N+I
VARIABLE DEFINITION
N = No. of parameters
in dictionary
Symbol for parameter inlocation 2 on data
record (1st variable)
Symbol for parameter inlocation 3 on data
record (2nd variable)
Symbol for parameter inlocation N + 1 on data
record (Nth variable)
TYPE
integer (double)
alphabetic (double)
alphabetic (doubl e)
alphabetic (double)
Note: Value for
Variable no. 1 is the double precision word 2 on data record•
Variable no. 2 is the double precision word 3 on data record•
Variable no. N is the double precision word N + 1 on data record.
I-6

Table 2.2.4. Data Record Format
WORDNUMBER VARIABLE DEFINITION TYPE
1 ITYPE 0 = continuingrecords
I = last record
in file
Double
Precision
2 Value of parameter in Double
location 2 on dictionary Precisionrecord (1st variable)
3 Value of parameter in Double
• location 3 on dictionary Precision• record .
N + 1 Value of parameter in Doublelocation N + I on Precision
dictionary record
Note: N is number of parameters read from previous dictionary record.
I-7

Table 2.2.5. Special Products Parameters
VARIABLE
SET
Time, Greenwich mean (GMT)Orbiter onboard
Time, Greenwich mean (GMT)Ground - MCC UTC
Time, ground elapsed (GET)
State Vector, Orbiter, inAries mean of 1950
Cartesian coordinate
System
State Vector, Orbiter, in
free flyer LVLHCartesian coordinates
State Vector, Orbiter, in
free flyer UVWCartesian coordinates
Attitude, Orbiter, Euler
angles, body axis
with respect to OrbiterUVW coordinates
PARAMETER
GROUP
NAME
6
7
SYMBOL PARAMETER
SGMTY
SGMTMO
SGMTD
SGMTH
SGMTM
SGMTS
GMTY
GMTMO
GMTD
GMTHGMTM
GMTS
GETH
GETM
GETS
XM
YM
ZM
XDM
YDM
ZDM
SLVX
SLVY
SLVZ
SLVXD
SLVYD
SLVZD
SU
SV
SWSUD
SVDSWD
ALPHU
BETAU
PHIU
X
YZ
z
X
YZ
k
U
V
W
yaw
pitchroll
UNITS
yr
month
dayhr
min
sec
yrmonth
dayhr
min
sec
hr
min
sec
km
kmkm
kmlseckmlsec
kmlsec
km
km
km
kmlsec
kmlsec
kmlsec
km
kmkm
kmlsec
kmlsec
kmlsec
degdegdeg
I-8

Table 2.2.5. Special Products Parameters {Continued)
VARIABLESET
Attitude, Orbiter, Trans-
formation, Aries mean
of 1950 to body matrix
Attitude, Orbiter, quatern-ion, Aries mean of
1950 to body axes
Attitude, rate, Orbiter,
angular velocities and
total rate, body aboutAries mean of 1950
Cartesian coordinates
Look angle, and angle rates
orbiter body to free
flyer
Range, and range rate,between vehicle
reference points
Simulation Flag
State Vector, free flyer, inAries mean of 1950
Cartesian coordinates
State Vector, free flyer, inAries mean of 1950
Cartesian coordinates
relative to Orbiter
PARAMETER
GROUP
NAME
9
10
11
12
13
14
15
SYMBOL PARAMETER
All
A12
A13
A21
A22
A23
A31
A32
A33
Q1
Q2
Q3Q4
YDOTB
PDOTB
RDOTBTDOTB
AZ
EL
RAZ
REL
RANGE
RRATE
PSIM
PMX
PMY
PMZPMXD
PMYD
PMZD
PRMX
PRMYPRMZ
PRMXD
PRMYDPRMZD
matri x
elements
row
ordered
scalar part
vector
rate about z
rate about yrate about xtotal rate
yaw
pitch
yaw rate
pitch rate
range
range rage
X
YZ
Z
X
YZ
Z
UNITS
n°d°
n.d.n.d.n.d.n.d.n.d.n.d.n.d.n.d.
n°d°
n.d.n.d.n.d.
deg/secdeg/secdeg/secdeg/sec
deg
deg
deg/sec
deg/sec
km
kmlsec
n.d,
km
km
km
km/sec
km/sec
km/sec
km
km
km
kmlsec
km/sec
kmlsec
I-9

Table 2.2.5. Special Products Parameters (Continued)
VARIABLESET
State Vector, free flyer, inOrbiter UVW Cartesian
coordinates
State Vector, free flyer, inOrbiter LVLH Cartesian
coordinates
PARAMETER
GROUP
NAME
16
17
SYMBOL PARAMETER UNITS
PU u km
PV v km
PW w km
PUD _ km/sec
PVD _ km/sec
PWD _ km/sec
PLVX x km
PLVY y kmPLVZ z km
PLVXD _ km/sec
PLVYD _ km/sec
PLVZD _ km/sec
1-10

2°3 SENSOR INPUT TAPE
The program stop (Sensor Tape Output Processor) generates two files in the
Sensor Input Tape (SIT) and Sensor Environment Tape (SET) formats. These
formats are described in reference 3 at the end of this Appendix. Both are
input for the SENSOR program. The SIT file contains relative observation,
attitude, sensed velocity, and vehicle state information. Each record has
length of 80 integer words and consists of 59 parameters and one unused
position per record. Table 2.3.1 describes the format and also provides
associated units and data types. Note that single precision and integer data
displace one integer word and double precision data displaces two integer
words.
1-11

Table 2.3.1. Data Format for Sensor Input Tape
PARAMETER SOURCE/ ENG.
DESCR IPT ION M/S ID UN ITS
1. Year vgow4749C Years
2. Month " Months
3. Day " Days
4. Hour " Hours
5. Minute " Minutes
6. Seconds " Seconds
7. GMT Time " Seconds
8. M50 Shuttle - x VgOH4277C-79C Feet
9. - y " Feet
10. - z " Feet
11. - _ VgOL4281C-83C Feet/Sec
12. - _ " Feet/Sec
13. - _ " Feet/Sec
14. COAS Data Good Flag vgox4849X --
15. COAS Horizontal Measurement vgou4847C Radians
16. COAS Vertical Measurement VgOU4848C Radians
17. RNDZ Radar Angles Flag vgox4901X --
18. RNDZ Radar Roll vgou4893C Degrees
19. RNDZ Radar Pitch V9074894C Degrees
20. RNDZ Range Flag VgOX4899X --
21. RNDZ Range Measurement VgOU4895C Feet
22. RNDZ Range Rate Flag VgOX4900X --
23. Rate Measurement VgOU4896C Feet/Sec
24. Star Tracker Data Good Flag vgox4835X --
25. Star Tracker Horiz. Meas. vgou4833C Radians
26. Star Tracker Vert. Meas. V90U4834C Radians
27. Nay. Powered Flight Flag VgOX4264X --
28. MSO Accum. - x VgOL8927C-29C Feet/Sec
(CG ref.)
RECORD RECORD
LOCATION TYPE
I I
2 I
3 I
4 I
5 I
6 I
7 D
9 D
11 D
13 D
15 D
17 D
19 D
21 I
22 S
23 S
24 I
25 S
26 S
27 I
28 S
29 I
30 S
31 I
32 S
33 S
34 I
35 D
1-12

Table 2.3.1. Data Format for Sensor Input Tape (Continued)
-E
MSO to Body Quaternion
al
n
il
DA Threshol d
DAP Jet Flag
Unused
Star Tracker Matrix
II
SOURCE/
M/SID
vgou4254C
V90H4287C-89C
II
ml
VgOL4291C-93C
U
II
V95U0873C-76C
n
ii
||
VgOA4747C
V90XS185X
vgou4920C-28C
LI
|!
II
Star Tracker Time-tag
COAS Matrix
II
vgow4837C
vgou4857C-65C
ml
u
n
COAS Time-tag vgow4853C
Rendezvous Radar Quaternion V90U4829C-32C
PARAMETER
DESCRIPTION
31. Current Orbiter Mass
32. M50 Target - x
33. - y
34. - z
35.
36.
37.
38.
39.
40.
41.
42.
43.
44.
45.
46.
47. "
48. "
49. -53.
54.
55.
56.
57. "
58.
59. -63.
64.
65.
6 • n n
67e 1' II
68. " "
69. Rendezvous Radar Time-tag V90W4841C
ENG. RECORD
UNITS LOCATION
Slugs 41
Feet 43
Feet 45
Feet 47
Feet/Sec 49
Feet/Sec 51
Feet/Sec 53
-- 55
-- 56
-- 57
-- 58
Micro g sec 59
-- 61
-- 62
-- 63
-- 64
-- 65
-- 66
67-71
Seconds 72
-- 74
-- 75
-- 76
-- 77
78-82
Seconds 83
-- 85
-- 86
-- 87
-- 88
Seconds 89
RECORD
TYPE
D
D
D
D
D
D
D
S
S
S
S
D
I
I
S
S
S
S
S
D
S
S
S
S
S
D
S
S
S
S
D
1-13

2.4 SENSOR ENVIRONMENT TAPE (SET)
Each record has length of 104 integer words and contains 64 downlisted
parameters and one unused space ordered as specified in Table 2.4.1. The
table also provides associated units, and data types. Note that single
precision and integer data displace one integer word and double precision data
displace two integer words.
1-14
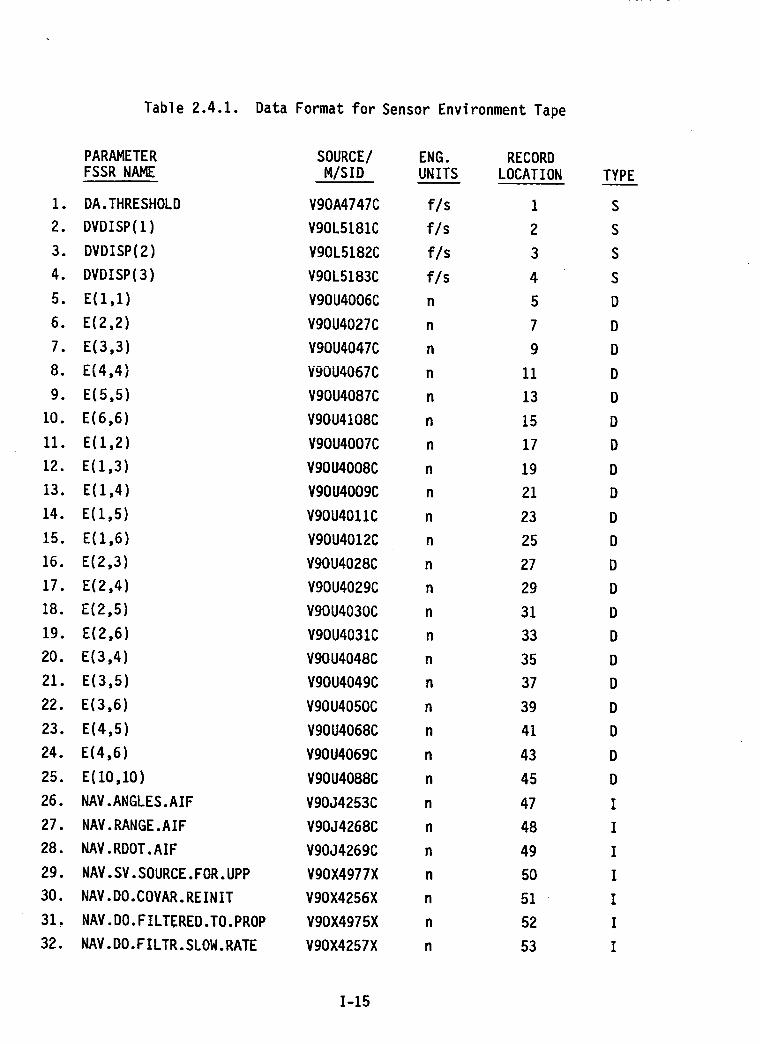
Table 2.4.1. Data Format for Sensor Environment Tape
io
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21.
22.
23.
24.
25.
26.
27.
28.
29.
30.
31,
32.
PARAMETER SOURCE/ ENG. RECORD
FSSR NAME M/SID UNITS LOCATION
DA.THRESHOLD V90A4747C f/s 1
DVDISP(1) VgOL5181C f/s 2
DVDISP(2) V90L5182C f/s 3
DVDISP(3) VgOL5183C f/s 4
E(1,1) vgou4006C n 5
E(2,2) V90U4027C n 7
E(3,3) vgou4047C n 9
E(4,4) vgou4067C n 11
E(5,5) V90U4087C n 13
E(6,6) vgou4108C n 15
E(1,2) vgou4007C n 17
E(1,3) VgOU4008C n 19
E(1,4) VgOU4009C n 21
E(1,5) V9OU4011C n 23
E(1,6) vgou4012C n 25
E(2,3) VgOU4028C n 27
E(2,4) vgou4029C n 29
E(2,5) vgou4030C n 31
E(2,6) vgou4031C n 33
E(3,4) vgou4048C n 35
E(3,5) vgou4049C n 37
E(3,6) VgOU4050C n 39
E(4,5) vgou4068C n 41
E(4,6) VgOU4069C n 43
E(10,10) VgOU4088C n 45
NAV.ANGLES.AIF vgoj4253C n 47
NAV.RANGE.AIF vgoj4268C n 48
NAV.RDOT.AIF vgoJ4269C n 49
NAV.SV.SOURCE.FOR.UPP vgox4977X n 50
NAV.DO.COVAR.REINIT vgox4256X n 51
NAV.DO.FILTERED.TO.PROP vgox4975X n 52
NAV.DO.FILTR.SLOW.RATE vgox4257X n 53
TYPE
S
S
S
S
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
I
I
I
I
I
I
I
1-15

Table 2.4.1. Data Format for Sensor Environment Tape (Continued)
PARAMETER SOURCE/ ENG. RECORD
FSSR NAME M/SID UNITS LOCATION
33. NAV.DO.ORB.TO.TGT VgOX4258X n 54
34. NAV.DO.OV.UPLINK vgox4260X n 55
35. NAV.DO.PROP.TO.FILTERED vgox4976X n 56
36. NAV.DO.TGT.TO.ORB vgox4259X n 57
37. NAV.DO.TV.UPLINK vgox426AX n 58
38. NAV.MEAS.ENABLE vgox4262X n 59
39. NAV.MM.CODE vgoJ4263C n 60
40. NAV.PWRD.FLT.NAV vgox4264X n 61
41. NAV.RR.ANGLES.ENABLE vgox4273X n 62
42. NAV.ST.ENABLE vgox4274X n 63
43. REND.NAV.FLAG vg3x6220X n 64
44. T.CURRENT.FILT vgow4749C s 65
45. TFOFF V90W4960C s 67
46. TFON vgow4959C s 69
47. T.ORB.STATE.UPDATE V94W3727C s 71
48. T.TV.STATE.UPDATE VgOW4939C s 73
49. V.FORCE(1) VgOU4956C LBF 75
50. V.FORCE(2) VgOU4957C LBF 76
51. V.FORCE(3) vgou4958C LBF 77
52. UNUSED 78
53. T.LAST.FILT.TLM vgow4285C s 79
54. R.FILT.TLM(1) VgOH4277C f 81
55. R.FILT.TLM(2) VgOH4278C f 83
56. R.FILT.TLM(3) VgOH4279C f 85
57. V.FILT.TLM(1) VgOL4281C f/s 87
58. V.FILT.TLM(2) VgOL4282C f/s 89
59. V.FILT.TLM(3) VgOL4283C f/s 91
60. R.TV.TLM(1) V90H4287C f 93
61. R.TV.TLM(2) VgOH4289C f 95
62. R.TV.TLM(3) VgOH4289C f 97
63. V.TV.TLM(1) V9OL4291C f/s 99
64. V.TV.TLM(2) VgOL4292C f/s 101
65. V.TV.TLM(3) VgOL4293C f/s 103
TYPE
I
I
I
I
I
I
I
I
I
I
I
D
D
D
D
D
S
S
S
I
D
D
D
D
D
D
D
D
D
D
D
D
D
1-16

3.0 INTERNAL FILES
The Internal Files provide the communication between programs in RELBET.
RELBET creates these files as outputs from various programs. User editing is
possible through the editing processors. All internal files are in internal
units (meter, kilogram, second, radian). Internal inertial coordinates are
Aries mean of 1950 Cartesian, although other systems may be used for file
storage or display.
3.1 GENERAL FORMAT
Internal RELBET files share a common overall
followed by data records that are called frames.
format consisting of headers
3.1.1 Format Compatlblllt_
The RELBET internal files are generally compatible with the gff format
described below and in reference 2. However some differences do occur.
Two sets of file routines exist in RELBET called the gff and gbfile
routines. The gff routines manipulate files as specified in reference 4. The
gbfile routine support the basic design of the so called gff files, however,
they do not utilize the dictionary records though space is allowed for
compatibility, and they do not set the program name/version number parameter
hcver on the header record. In fact the gbfile routines being written in C do
not use the IOP (I/O packet at all). Thus non-RELBET processors which read
gff files may not be able to read files created by the gbfile routines.
3.1.2 Overall File Format
A gff file is defined by its format. There are two definition tables in the
file, the header and the dictionary. The header provides file information and
the dictionary provides data information. Following the header and dictionary
is the data itself. Below is a diagram of a gff file.
1-17

Record
1,n
n+l, n+5
n+6
n+7, n+7+m
n+7+m+l
Description
Header (n = number of header records)
Dictionary
*beg
data frames (m = number of data records
*end
All records have the same record length. The user selects the record length
by determining the required (or useful) length of a data frame. The Header
must contain a fixed number of information words; therefore, the number of
records needed for the Header is a variable.
By the nature of its structure, the Dictionary consists of 5 records. The
record immediately preceeding the string of data records is filled with the
work "*beg", and the last record is filled with the work "*end".
3.1.3 RELBET Data Frame Formats
Frames are of a fixed length for a given file, but the length may vary between
file types. Although frame formats vary from file type to file type, they are
composed of a fixed format header portion and a data portion. The standard
frame header format is as follows:
IntegerWord
1-2
3
4
Type Contents
DP Time-tag
CHAR*4 Frame ID
I Edit status
The formats of the data portions are discussed under the individual files.
noted above the Begin and End Frames contain fill data:
As
"*beg" and "*end" respectively.
1-18

3.1,4 File ]/0 Packet
The file I/O packet, iop, is a gff communication table used by both input and
output routines. This table carries pertinent file data across read/write
interfaces. Table 3.1.4.1 defines the 41 integer words in lop.
Table 3.1.4.1. I/O Packet Contents
Word Label _ Description
1 pname c72
19 punit i
20 pfrmsz i
21 phdrsz i
22 pcrec i
Name of gff file to create or open.
Pname is a user-defined input to the open routines,gfnew and gfopen.
Unit number on which to open the gff file.
Punit is a user-defined input to the open routines,gfnew and gfopen.
Record length.
This will be the record length in integer words of the
gff file records. The record length will also be storedin the file header. The header will be broken into
records of this length and written to the gff file. The
record length is a user-defined input to the create
routine, gfnew. When the file is reopened, the openroutine, gfopen, will check the header for the record
length and then open the file with the proper recordlength.
Number of header words.
The number of header records is a constant and is, at
this time, 90 words. This parameter is here to prevent
hard coding of the header size in the various gffroutines. The number of header records is also stored
in the file header. Phdrsz is set in the open routines,
gfnew and gfopen.
Current record number.
Pcrec points to the current record in the gff file.
When writing to the file, pcrec points to the last
record written. When reading from the file, pcrecpoints to the last record read. Pcrec is always
current, regardless of which gff routine was last
used. The record number is not affected by the displayroutines.
1-19

Word
23
24
25
26-27
28
29-33
Label
prwfl g
pnrec
pstat
ptoff
ptype
pbdate
Table 3.1.4.1. I/O Packet Contents (Continued)
Type
i
Description
Read/write status.
Prwflg defines the r/w ability of the file where a value
of one is read only, and a value of two is read/write.
When the file is being created by gfnew, the rwflg isset by the routine to a value of two. When the file is
reopened with gfopen, the rwflg is a user-defined
input. Any dependent on the value of the r/w flag.
Number of records in the gff file.
Pnrec is always current.
Error code returned from the gff routines.
Pstat can contain two types of error codes - system i/o
errors and gff errors. If the error is a system error,the error code will be a 900 number. If the error is a
gff error, the error code will be negative.
The possible gff errors are:
1. trying to access within the dictionary or the header2. trying to access past the end of file
3. file does not have write permission4. invalid time requested
dp Time offset.
All timetags (timetags are assumed to be the first
parameter in the data frame) stored in the gff file arestored in seconds since base time. The base time of the
file is stored in the header. The base time of one gff
file does not have to be the same base time of any othergff files used in a program, and it does not have to be
the same as the program base time. The time offset is
the difference between the program base time and file
base time (tbase (prog) - tbase (file)). Upon writing a
record, the timetag will be converted from seconds since
program base time. The time offset is computed in theopen routines, gfew and gfopen.
c4 File type.
The file type is a user-defined, four characteridentifier used to identify the type of data in thefile. It is an input to the create routine, gfnew, andis also stored in the header.
i(5)
1-20

Table 3.1.4.1. I/O Packet Contents (Continued)
Word
34-35
36-37
38-39
40
41
Label
pbsec
pstrt
pstop
pnhrec
pndict
Type Description
dp Base date.
dp
dp
The base time is stored in 5 integer words and one dpword. The integer words are the year, month, day, hour,
and minute; the dp word is the seconds. All timetagsstored in the file are stored as seconds since the base
date. See the entry for ptoff for further
information. The base date is a user-defined input to
the open routine, gfnew.
Start time.
This is the time of the first data record. The start
time is defined when the *end frame is written to the
file (gff routine gfend) and when an existing gff fileis opened. If a gff file is changed, the start time is
not guaranteed to be correct until the *end frame iswritten. The start time is stored as seconds since file
base time and is also stored in the file header.
Stop time.
This is the time of the last data record. The stop timeis defined when the *end frame is written to the file
(gff routine gfend) and when an existing gff file is
opened. If a gff file is changed, the stop time is notguaranteed to be correct until the *end frame is
written. The stop time is stored as seconds since file
base time and is also stored in the file header.
Number of header records.
The header is 90 words of data and is written to the
file "pfrmsz" words at a time. If the last record is
not full, it will be garbage filled. There are routineswhich read and write the header. The number of header
records is computed from phdrsz and pfrmsz (nhrec =
int(hdrsz/frmsz + .5)) in the create routine, gfnew.
This is stored in the header. See phdrsz for moredetails.
Number of dictionary records.
The number of dictionary records is a constant 5
words. This parameter is here to prevent hard coding inthe various gff routines. The number of dictionaryrecords is also stored in the file header. Pndict is
set in the open routines, gfnew and gfopen.
1-21

3.1.5 Ftle Header Format
The file header consists of a set of records, each of which has the same word
length as the data records. The header contains 90 (integer size) words plusas many fill words as are needed to complete the last header record. Table
3.1.5.1 summarizes the 90 integer words in the header.
Table 3.1.5.1. Header Contents
Word Labe_____lType
1 hnhrec i
2 htype c4
Description
Number of header records.
See iop - pnhrec for a description.
File type.
See iop - ptype for a description.
3-4 hcdate c8
5-8 hcver c16
9-34 hcdes c104
35-36 hudate c8
37-40 huver c16
Creation data.
When a gff file is created, the currect data is stored
as the creation date in the form yy/mm/dd.
Program used for creation.
The program name and version number which created the
gff file, along with the version of the gff library is
stored. The suggested form is "name-ver/gff-ver", where
name is the name of the program (6 characters max) and
ver is the version in the form Vn.m (Ex: trjpro-v2.2/gffl.0). The program name and version are user
inputs to the create routine, gfnew, and the gff library
verion is defined by the gff library in gfnew.
Creation description.
The creation description is a user-defined input to thecreate routine, gfnew.
Update date.
Each time a gff file is reopened with a r/w status, the
current date is stored as the update date. When thefile is created, the update date is the same as the
creation date. The update date is established in the
close routine, gfcls.
Update program name and version.
See HEADER - hcver for a description.
1-22

Word Label Type
41-66 hudes c104
67-71
72-73 hbdate
74-75 hstrt
76-77 hstop
78 hnrec i
79 hfrmsz i
80-90 hspec i
i(5)
dp
dp
Table 3.1.5.1. Header Contents
Description
Update description.
Each time a gff file is reopened with a r/w status, theupdate description is stored. When the file is created
the update description is set to the creation
description. The update description is established inthe close routine, gfcls.
File base date.
See iop - pbdate, pbsec for a description.
S_ar_ time.
See iop - pstrt for a description.
Stop time.
See iop - pstop for a description.
Number of data records in the file.
When the *end frame is written to the file, the number
of data frames is computed and stored. This value will
be correct as long as no new data records are written
after the *end frame. New data frames appended to the
file will automatically overwrite the *end frame, if one
exists. Note that this is not exactly the same
parameter as the lop parameter pnrec. In the iop, thisparameter is the total number of records, whereas, inthe header, it is the number of data frames. Hnrec isset when the *end frame is written.
Record length.
See iop - pfrmsz for a description.
File specific block.
These 11 words are extra header space in case the user
feels the need to put more in the header. The gff
library only recognizes its existence; it does nothing
with the information. The block is a user-defined inputto the create routine, gfnew. It can have variables of
any type stored within.
3.1.6 Oicttonar_ Format
The dictionary contains the definition of each parameter in the
records. The definition is defined as the name of the parameter, its
data
1-23

dimension and type, and its length if the variable is character.
there records are not set with the gbfile routines, however,allocated for them.
Note that
space is
The dictionary is written to the gff file when the file is created by theroutine gfnew. The dictionary is input into gfnew in the following format:
character*20 dict(frmsz)
where frmsz is the number of words in a record. Each dict(n) is the entry for
a single parameter, and each entry is in the form "ndtl", where
n is the parameter name (8 characters),
d is the dimension of the variable (Ex: 3 or 3,3) (8 characters),
t is the variable type (i,l,r,c) (I character), and
l is the length of the variable if t=c (3 characters).
The dictionary is stored in the gff file transposed. The routine gfdict
returns the dictionary in the c*20form. The dictionary is contained in
exactly five records in the gff file. Each dictionary entry (dict(n)) uses
one word from each of the five records, such that
rec 1-2 contain the name from each entry,
rec 3-4 contain the dimension of the variable,
rec 5 contains the type and length of the variable.
Figure 3.1.6 shows the relationship between the user-defined dictionary and
the file dictionary.
rec#
diet(1)
diet(2)
dici(,)
! Z
n ...... ÷
file
3 t 4 I 5 IId ...... + 1;1-+
II
II
II
I I I
Figure 3.1.6. User/File Dictionary Relationship
1-24
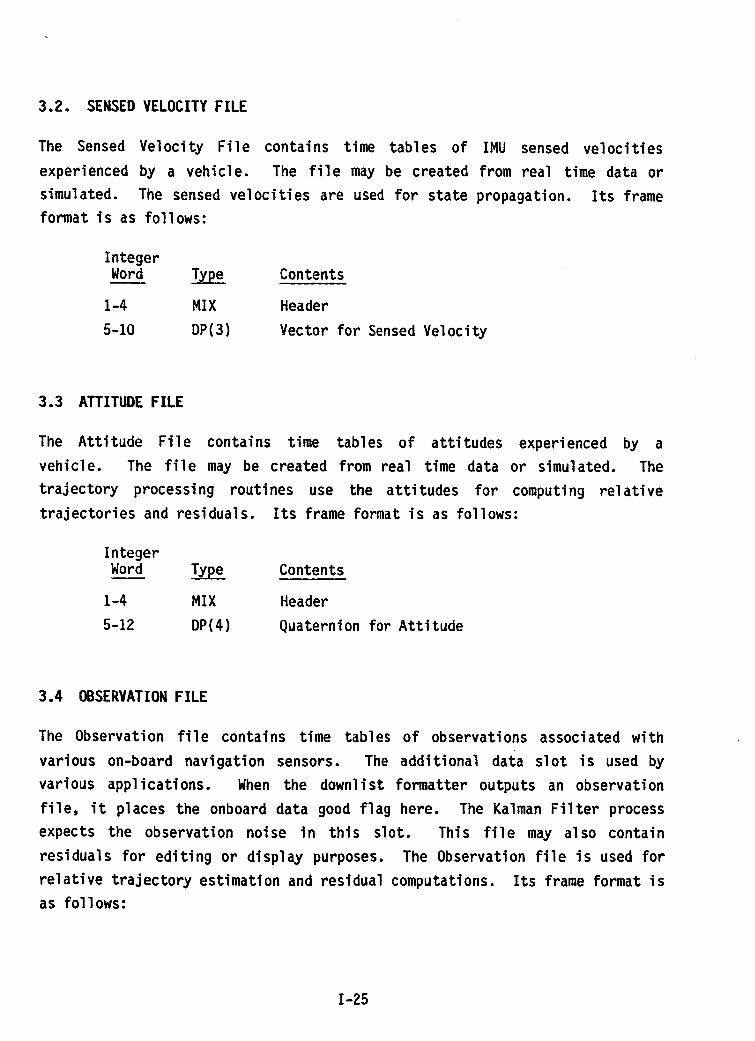
3,2. SENSED VELOCITY FILE
The Sensed Velocity File contains time tables of IMU sensed velocities
experienced by a vehicle. The file may be created from real time data or
simulated. The sensed velocities are used for state propagation. Its frame
format is as follows:
IntegerWord
1-4
5-10
Type Contents
MIX Header
DP(3) Vector for Sensed Velocity
3.3 ATTITUDE FILE
The Attitude File contains time tables of attitudes experienced by a
vehicle. The file may be created from real time data or simulated. The
trajectory processing routines use the attitudes for computing relative
trajectories and residuals. Its frame format is as follows:
IntegerWord
1-4
5-12
Type Contents
MIX Header
DP(4) Quaternion for Attitude
3.4 OBSERVATION FILE
The Observation file contains time tables of observations associated with
various on-board navigation sensors. The additional data slot is used by
various applications. When the downlist formatter outputs an observation
file, it places the onboard data good flag here. The Kalman Filter process
expects the observation noise in this slot. This file may also contain
residuals for editing or display purposes. The Observation file is used for
relative trajectory estimation and residual computations. Its frame format is
as follows:
1-25

IntegerWord Type Contents
I-4 MIX Header
5-6 DP Additional Data
7-8 DP Measurement
9-10 DP Residual
3.5 EPHEMERIS FILE
An Ephemeris File contains the inertial trajectory for a vehicle. This file
may be created from real time data or generated by simulation. Vehicle states
are interpolated from this file. Its frames have the following format:
IntegerWord
1-4
5-10
11-16
Type Contents
MIX Header
DP(3) Position Vector
DP(3) Velocity Vector
3.6 IMU AI'rITUDE FILE
The IMU Attitude File is used by the IMU processor to generate a selected or
average attitude file. It has the following format:
Integer
Word Type
1-4 MIX
5-12 DP(4)
13-20 DP(4)
21-28 DP( }
29-36 DP(4)
37-38 I(2)
Contents
Header
Quaternion IMU-I
Quaternion IMU-2
Quaternion IMU-3
Quaternion Selected
Source of Selection (spare)
1-26

3.7 IMU SENSED VELOCITY FILE
The IMU Sensed Velocity File
selected or average sensed velocity file.
is used by the IMU Processor to generate a
It has the following frame format:
Integer
Word Type Contents
I-4 MIX Header
5-10 DP(3) Vector IMU-I
11-16 DP(3) Vector IMU-2
17-22 DP(3) Vector IMU-3
23-28 DP(3) Vector Selected
29-30 I(2) Source of Selection (spare)
3.8 SOLUTION FILE
The Solution File contains such information as current solution state
estimates and statistics. This file is an optional product of the Trajectory
Processing processors. Frame lengths may vary from file to file depending on
the options exercised by the processor, however, frame length is fixed in a
given file. The solution has the following format:
IntegerWord
1-4
5-4+2S
5+2S-4+2S+D
Type
MIX
D
DP(C)
Contents
Header
Solution Vector
Lower Triangular Covariance by Rows
Where
S = Solution size
D = S(S+1)/2.
1-27

3.9 RELMIVE TRAJECTORY FILE
The Relative Trajectory File contains relative trajectory information.
the following frame format:
IntegerWord
I-4
5-16
17-28
Type Contents
MIX Header
DP(6) Fiducial State
DP(6) Relative State
It has
3.10 PLOT DISPLAY FILES
Table 3.10.1 summarizes the various options for output parameters from the
program xqdisp. Here 0 designates the first vehicle or orbiter state vector,
T the second vehicle or target state vector, and A the attitude of the first
vehicle. All groups consist of six parameters. The coordinate systems are
defined in the Engineering Manual (Reference 9, Section 2.0).
Plot file parameters are in internal units. For printed displays, the user
may specify up to three systems of units for length, velocity, angle, time,
mass, force, and acceleration. Parameter groups will be displayed in each of
the specified systems of units. The record format for these files is as
follows:
IntegerWord
1-4
5-16
Type Contents
MIX Header
DP(6) Coordinates
1-28

Table 3.10. I. Parameter Groups
NUMBER ID OBJECT COORDINATES
1 SXYZ 0 M50 Cartesian
2 SELT 0 M50 Elements
3 SUVW 0 Target UVW
4 SLVH 0 Target LVLH
5 SSHL 0 Target Shell
6 TXYZ T MSO Cartesian
7 TELT T M50 Elements
8 TUVW T Orbiter UVW
g TLVH T Orbiter LVLH
10 TSHL T Orbiter Shell
11 TBOD T Orbiter Spherical
12 IREL T-O M50 Cartesian
13 EREL T-O M50 Elements
14 APYR A MSO Euler Angles
15 AUVW A Orbiter UVW Euler Angles
16 RPRM T-O Range and Rate Magnitudes
REQUIREDINPUTS
0
0
O,T
O,T
O, T
T
T
O,T
O,T
O, T
O, T, A
O,T
O,T
A
O, A
O, T
In column 5,
A indicates orbiter attitude needed
0 indicates orbiter trajectory needed
T indicates target trajectory needed
1-29

3.11 COAS NATRIX FILE
This file contains frames of body to MSO rotation matrices time-tagged by the
time of each COAS observation. Its frame format is as follows:
IntegerWord
1-4
5-22
Type Contents
MIX Header
DP(9) Components of Matrix by rows
3.12 COVARIANCE FILE
This file contains th UVW referenced sigmas associated with some filter
estimate of some relative trajectory.
Integer
Word Type
1-4 MIX
5-16 DP(6)
17-28 DP(6)
Contents
Header
Sigmas for Base State
Sigmas for Relative State
3.13 BIAS FILE
This file contains the bias solutions and associated sigmas computed by one of
the filters.
IntegerWord
1-4
5-A
A+I-B
Type Contents
MIX Header
DP(S-12) Bias Solutions
DP(S-12) Bias Solution Sigmas
where s is the solution size
A = 4 + (S-12) *2
B = A + (-12) *2
1-30

3.14 RESIDUAL FILE
This file contains information from the Kalman filter as shown below:
Integer
Word _ Contents
I-4 MIX Header
5-6 DP Edit Status (-1 or 1)
7-8 DP Observation Value
9-10 DP Residual Value
11-12 DP Residual Sigma
13-14 DP Bias Value
15-16 DP Bias Sigma
3.15 QA FILES
The following files are created by the various QA processors:
The Attitude Angular Acceleration File
Integer
Word Type Content
I-4 MIX
5-10 DP(3)
11-12 DP
Header
Angular Accel erati on
Magnitude
The Sensed Acceleration File
IntegerWord
i-4
5-10
11-12
Type
MXI
DP(3)
DP
Content
Header
Sensed Acceleration
Magnitude
1-31

The Master Noise File
IntegerWord Type
I-4 MIX
5-6 DP
7-8 DP
9-28 DP(IO)
Content
Header
End time of interval (Begin time is timetag)
Average value of observation
Value of moise associated with various order of
divided difference
The Selected Noise File
Integer
Word
1-4 MIX
5-6 DP
7-8 DP
9-10 DP
Content
Header
End time of intervals (Begin time is timetag)
Average value of observation
Selected value of noise for time interval
The Star File
Integer
Word Type
1-4 MIX
5-6 DP
7-8 DP
9-10 DP
Content
Header
Inertial Azimuth Angle
Inertial Elevation Angle
Angle between the previous pointing vector and
current pointing vector
3.16 SENSOR FILE
This file contains downlist information needed to create the SENSOR tapes.
1-32

IntegerWord Type Content
1-4 MIX Header
5-6 DP gmt
7-8 DP COAS Data Good
9-12 DP(2) COAS Angles
13-14 DP Radar Angle Data Good
15-18 DP(2) COAS Angle
19-20 DP Radar Range Data Good
21-22 DP Radar Angles
23-24 DP Radar Range Rate Data Good
25-26 DP Radar Range Rate
27-28 DP Star Tracker Data Good
29-32 DP(2) Star Tracker Angle
33-34 DP NAV Power Flight Flag
35-40 DP(3) Sensed Velocity
41-42 DP Mass
43-50 DP(4) Attitude
51-52 DP Sensed Acceleration Threshold
53-54 DP NAV DAP Jet Flag
55-72 DP(9) Star Tracker Matrix
73-74 DP Star Tracker Timetag
75-92 DP(9) COAS Matrix
93-94 DP COAS Timetag
95-102 DP(4) Radar Quaternion
103-104 DP Radr Timetag
105-110 DP(3) DVDISP
111-152 DP(21) Meters of Covariance
153-188 DP(18) NAV Flags
189-192 DP(2) TOFF/TON Flags
193-196 DP(2) Update Flags
197-202 DP(3) V force
Note for more details on contents see section 2.4.
1-33

4.0 TEXT FILES
Various units are used for display. Depending on the processor, the user may
select up to four different units for short (TERM) display, nominal (OUT)
display, detailed debug (BUGS), and graphic (PLOT) display. Details as to
format and access of these displays depends upon the processor.
1-35

5.0 DATA BASE FILES
The text files described here are generally output by the qa processors. They
share a common format which allows them to be merged, sorted, and searched by
various UNIX and RELBET processors. Each line of text contains at least four
fields separated by white space.
Field 1
Field 2
Field 3
Field 4
- Timetag (begin time of some event in GMT seconds)
- Primary key word (alpha) usually denoting data type
- Secondary key word (alpha) usually denoting type of event
- Duration of event in GMT seconds
The remaining fields are defined per processor output (see program manual
entries).
1-36

REFERENCES
1. "Interface Control Document for ODRC Computer Compatible Tapes," CSC-
1921, G. E. Hubacek/CSC, February 1984.
2. "RELBET Product Description (Update/May 1985)," TRW Report No.
85:W482.1-57, B. P. Huysman, L. A. Pieniazek, 15 May 1985.
3. "Sensor Tape Production Manual," TRW Report No. 86:W482.1-60, J. K.
Knoedler, 3 June 1986.
4. "HP General File Format (GFF) User's Guide," TRW Report 39107-H-21-
UX-OO, D. Campbell, 14 December 1984.
1-37

APPENDIX II
CONTEXT FILES
II-i

0
£
J _
)

O.
E
i
L
:E
rY
L
{n
LOeO
O_
0
(_
(J
n
¢-(- E" -- c-
.C (- • . .E {3. -- .E.E. ,.E._.E._- • >, .E.E.E
O_ .E -- .E. X , L} ° {_ .IJ f- _ (- , • • _ _)E • mr • ,(n]l)'om • • ,.Em_+' n C
._ _.E _ ,.E 0 _ 0_ _- 0 (0"_-_-_ _ • _ {0 c" _.E._

r-.E r- .E
.E .E • ..E £L .E
0_ .E .E .E-_ .E _- • :_ .E (- .C:E _;_. _'>_ .u .c_- _- ....• • • _ _ U'_ In • . .£::: G)_._ 0 E
_._-_ (" L _ J_.O.O.O.O _" _ _-_._ G) Q)'_ _ _0_
'_" "_ '_" 0 0 _n _ "_ _r '_ "_" _" 0 _ '_- _ _ 0 0 0 0 0 ,_- 0
0
00000000000000_000000000
UUUUUUUUUUUUUUUUUUUUUUUU
IIIlllllllllllllllllllll
Illlllllllllllllllllllll
OLLLLLLLLLLL_LLLLLLLLL_LL_lllllllllllll|llllllllll
IIIII1111111111111111111
_LLLLLLLLLLLLL_LLLLLLLLLL_tlllllllllllllllllllllll
IIIIIIIIIIIIIIiiit111111
___0___0__

O_(0
O.
r
r-
O)
nn
LO
oO
0
U0
Q
I---_ E .... E ....7- _1---_ 0 Q)._ 0 Q) 7-
I (_ e_- E E_-- E E I
0 Q) _ -_ F- _- ._ I-- I-- (:3
.__ O0 r'7 O0 w r7 rn w 0 LU
I-- (_ • Q) • (_ _ 0 l--
n.,i ._ o o o o o o o m
E C E E E E E E E u,-
"(3 L L L L L L L L "P "_C a) G) • Q) • O} (_ _) _,-'0
-_ x X x X X x X X _ O)


O)O..C
ira-.(2COoOO_I.D°.
0
0
II)Q
nn llO C) •
.... Ob .- _- _ • '" 0
oc'r 0 _- _- _- _ _- ,-_ _ _ _- m _- _- u.m
C C C _- C C C C _- C C C C C C C C _- C_-_. L (- L L L L L L L L L I. L L L L ._ -_ ._
x x X x x x X X X X X X X x x x x Qb _ _

I
E)
LU
=E
4-
(-4-
=m
E
"0C
0 "-_0
m E
4,J
_ c I"
L * r"
"0 '_ I_C
E
o_
. I:_ * G) ....
+' _- I-- I-- _1 -_
: (OUJ O. _ Z I--E (/_1-- t.U LU (:D L.
OE_ _ M U. U
II _ _ E-- _ I._
O •-_ _w Z L .- m . Z - I _EL _P' "-._-- L :3 E ILl LUJ WLU UJ
L _ C >,0,,_ "_ O-- 0 _E ,i-_l,- =E:E =E l--
'+- .w .w , _ -w O • C E 0 _" O_ 3E,_ q-
• E C E Z "0 .- -- "0 T "007-O e C_" ...... @ • "0 L
6-;
E 0 k- _-_E -- =E _ ,'-,,-_ ......
•-_,. o= .... _;®-.. _-zo .... "6_C - ""
£).. L. uJ :E I-- w >_>, "0 -I-' w i,u LU .,H ._ .t.._ 0.. £),. L U.. I:L L
-_ -_ -J E _ :3 V_ -w -i_ :3 _ D _ -_ _ .J _ .J _ _ _ .- -. -_ -_ -_ -.
O 0'_ 0 E O=E E E O O 00 EE _=£_[ E C C 000 O 00> > U_'_ "O'r _--'0"0"0"0-... O "r O .... > > > > > >
L £. L L L L
XXXXX XXXXXXXXXX XXX XXX XXX XXX

(N
O.
(1.
E
t--
o3O_
..
0
0r_
L _ L L_ 0
_ _ I
>>> >>>
CCC CCC C _
LLL LLL "_ "_'_
XXX XXX _ _
_0___

0 "_ "_ -J 0
I ZZ'_ I(./3 _ _ .l.J (/3
(,,3 -0 L n 0"3
J I_ ._IZ -I_ -I_ -_ Z
O) c- C C C_-
._ X X X _ Q)

03(:L
C
Lf-
£0O0
0
('9
0
000
_*_* ** U.O U
* * _ UO._. U.OU O*UU ''_ 'X.
O'U' '. __ X'_X.X.XOXX _LLL "_L'_
X'_X'_,'_'_ _LL_ L_
"_'_LX_L *LL_ _
L_ U_L&_ ELE_EQE_EE ,LL_ _ UL L
I* EE >X_X E *_O_L_ * XX X
O EEEEEEE E>_L L_
I
ooooooo __ 000
CCCC_C CC_C _C_LLLLLL LLLLL L_L
XXXXXXX XXXXX XXX
__0___0_
*O_ U* OOO_O .OO. O.,
,O.OL_,LO.LL_ ,OOLO ,_00
000_0_0__O_OO>_O0_OO
* • • O > * • > O • > >>* > @ _> _>
O _ >* * > * *
g -2 "" .._ ...._0 _ _ _>___0_
__ _ _---_
_'_O__N_>>_>>>>L>>LO** >>** ** >** >_
I
000000000000<
C_CC_CCC_CCC_LLL_LLLLLLLL-_'_
XXXXXXXXXXXX_
_@_0__

L_I
t-O(2
UI
C0
C
fl-
(JI
.0E
I/]
(JI
_30"0
U
C
n>,
4..,
0 W0
En
e" >,W
tJ U
"_ 22_- U U
_" .._" _
n _ L _3
+, ,_. 0 r.- .._, ._,
E C:3 E 0
.,,-, r" C C
c-O_j
.°
ZD
_3Z
LLI
ILl _J_(D LU> I _3
_- I
',' _)
OF POOR QU_LIT'y
___0___

O-
c"
oO
O_
0
U
0
4-J
X
t- 0
0
.-U I._ _- .,W
0 _ L "_- JO "_ l_..LI- (" _i- _, D] J,_
0 CJIL _.- f- f-
•--I r" -C -C .C C._-' .-
IJ-
.p,
U
L4_(B

OF POOR QUaLiTY
r-_ o cEl o_ J3 .Q o)
.... 0) .- L _-. (0 _) .-
-O _ .Q G) _ El I-- I r_
• • u_ .-- L ..J -J ,-J 0 O; r_ G)
O.C _" 0 L L L 3 _ L _ _ L _ .E L
.Q .Q .Q .Q r _ .C .Q r_.E _ e8 .Q .Q L .Q .C
C C C C E E E C E C E E E C E C CL L L L L L L L L L L L L L L L L
X X X X X X X X X X X X X X X X X
___0___0___0

_J 0(- U
0 _
• _ f _'_0 i C
_. f.- L_.. _ _-. 0
r" 0 r) . 3
_ 4.. rj [_(n O O03 (" _..wE
(.,) c c t-- ._
> __rv Oh- 0
07 "on, Ow E IECrY* O* O*
LO _w_Z_Z_O0
O_c- c- C
-. * _ _ "{3
0
0(D

OR_Ci;_Z_L i_C_. i ¸
OF.. POOR QUALITY
L
0u,_
eE •
U_-O.
•_ eE(- no ¢o_: X
ee A
m cel.- L u_
_ ,LL
L . _,N-"0:3-'(
C _- Ln L,4-0 "_e_e; """_ (" (- CO _-
0 JO_- E
0 0_, 13",,e -_ = t--_--E "0_-- +X 0
-_ • 6) I--
L _ .E U) "0 _ •• e+,._ D >,E
; _)u)+_ -- 4,-, E
.1_ L L e • e _
-_ "r _- D .
"_ "m O O D _ E _
"0"0= • _._ .E E
_ C q- 0 e)_- OJ _ •u_ _- _ o) E.E JOE "0._ q--
• 0 u) _ • o_ e ..-_ L
-_. .C.l_ "0 _ q..l-_ W_-- _) :_'_ C • C=E
"O.C.Q Lt.n _) 0"0 e,,_• E-_ L ®rn (n*_ Z
-O +_ (0 q- ¢[ 0 C O= OI--O1L .E "_ O.'_ _: _ t-- +_
0 oe _- 0 _:
L c" u) e.Q _ e _ +,1-- L (])
,.i- "_ _'0 _:_ 0 • _ {:)..eL _-_ q-_ O1C E
u} u).F, e 3 C-- _e D C._ 0_- "0 e'_ 0 X
E • .E .O _ (/) L O.O)_ 0 _ul Ol I_D_
E I-- _ (/) 0 I/} _, L
_._._ E _''_ _ I-- _ I-- _-
O0 O0_0_°_0_
4-
D
.0
.pX
e
_W_E_
e_eeeeeeEEEEEEEE C
• p-pip.p.p.p.plp ip

I1)0"1
o.
c"
G0l-"O.cn0/
I,oc0O_
ol
0
000
0__0__0_0_____00_
0 _ _ W NW
_IIII_I_II_I__I_
.le
g-
O_0
t-
O v,_0
m 0r" N
gc
.E %33__ 000_
mooooooooo
*NNNNNNNNN
_O _O
0 w w w
IIiIIIIIIIIIIIIIIZ\ JJJJJJJJJJJJJJJJJJ
OO00000000000OO000CCC_CCC_C_C_CC_

c" c" c-•_ °_
000
N N N
_, _ T,
_ w
5" LL_ >-e¢" i:1. rn
"r "r "r
,..1 .._1 ,._1
_r- t-
g"l _ 11"1

"TO0
E.D
1.0oo
o,I
0
011)
_0
0
0__w
om
v
0 oo
w
E m_
L _
_ mv
0 D O0
_ w_
00_
AAA
NN
mm
w
N
_0___0 _

OF POOR QUALITY
E
r"
"0 •O_ InE v)
Lm'O
_0
3• C
• C4_E _ E
C * m
_-I11 E r-0_'- _¢_
_r_ E
u) q-- O. ql.O"r _ 0 I 0
I L _" "0I- "0 G) w ._ a_
I.- _ ..J E
H "_ _ (.9 0 _--J 0 (_ "'_ q-'P
E 0} (- (" Z __- iZU U(_ {/1
4_
* 00,)
,.0 N
x0 &"
r" .... _l'-* ..E r" .= ,...- (./1
,, E:-_ .-_ OZ
.J _._Z0 _" ,-
I e_
I _ _ (_ " II- ,_ IZ m _-0 "_ • 4" "_ 0E3 _ __ _) J (:3
l C{_Z I
u') _*Z I
.j u,.. i.... "0 .j
Z -_ -J (_ +_ ZL_ OZr E
>(_ O-_
E r C E q-Eq-1_ L C L L _'P
xxxx 6) 0 O)
___0___0___0

O.
.C
0
CO
0
0
0
O_03_OELE
I I__E
_LLL_LL_
__1
EEEEEECCE
XXXXXXXXX

ORIGINAL PA_3_ t3
OF POOR QUALITY
>.
0._ (24w .P _.
.x In _E (,.) (_ 0,.OO.Q O
-w r_ {nO "_JD+ _ •
X+' _EOE O"0 E 0L L L
_0_0,_ %,_
"0 0e L -¢,-' (DL _ C(D 4.., L---
30 C,-C Q..- O
•- O- {D Q_-w
LU NI-- e) O
L.U _ • I"- q,-:D 0OXD 'eI(M {- G) (-
w- E £Lu)
I.U ---..__ U;D 3 O t'rJ._0 (0 (_ 73
v U (_',30>,>'0<[ _ 4w iI_C_- .D D. m
_,9,- G) X CON _- Io= c
OC_ t U -w._ 0u',O X -_: 0 - (n 3 +' {J
r_ _- c O X..D _ u) 03tri-
O .0 E El,- 0-_ C O._ L [,. [.. u') _J ,_,-' -_ (D
+_.E.E.C E E C .X (_ EZO_0 U (2 O "-- '_ "-,-',,. O -w D
_nx o
"0 0 -I-.'
O.
-..

0
m • z
o
U
a

U
I{nE
OU
0
UED
O
IC
0
4-,
U q_E In
(_ OO
5 _
I _- U U e) ]
Q) * ..n C
O '-_ 3_ L L Z'O
Z L i_ .-
O n _ L :_ :D 0 u-.O .... E
_--"-- 0--_:G) L "_ -J _0 C
• {J E E _l_J --I .... (_> -'O -e --I
O --; O-J.J > _) * _) _-J _).J E
_0 J _JJ'P_ Z"-J EJ L
E d) UJ • "' "' n LD "' uJ ®D n U I:).U_-_ :D ¢lu--_U +_ U 4-'
C _ >, I IC 0 .E IC IC I X"_ ,-_ -I_ O. _.._ _ U O. -_ _. "_ n •
___0___0___0_

b_tO
O.
c
tm
In
In
E
00
0
(o
0
0
00
__0___0_

.b
_J3
QJ
IJ
LUU
I

n
.E
(/)
£.
(DoOO_
r_
0
l'o
0
L)0
rn
0___0___
J
Z
r,, .-J'O t'_
n C Et- 0 n.... n >
; E E C E q- _-
{_ _. £. L. _, -_-_u
-_ X X X X • "0 _)
0___0__

___0

Q)OI
_0o..
,.,C
0;5
4_
L
£00O
D'-
0°,
0
0
___0__

fD
(q .-.... O0 _ 4_
Q}_ ,-In "- • • L.
"_ c_ _ E_ D 0 E_
_ _ _ .1_ _ I'_ _ 211--_- 0 0 D +_ D _ D 0 _ D w+_ _-- 0 C 0 0 O-- C 0 _n
q.0
>,

0,.
r-
e
SE
o0
0..
0
0
D0
U
___0___0_

qt• 4t
.It 4t
t
e .It
4t(.
4_m
-E
4Jr"
_- "_ o09 • .I-,
4:; _ • O
ffi4)
LLOO_4aUU
_-q- O-- x _-
e-
@r"
U
EffiL
E
(.(013.
(9
O)ffi
E
(.ffi
E_ _ O. (9 II) _0 O. _O t- O r'.. U U r-- _ r.- O) t-- _- r- _- r- q- .Q
_ X • Z _ Z _ Z ",- Z Z _. Z',--- Z • Z • Z > Z • Z > ZXe O q- O _- O _- O >_ O 1;)12. O. O -- O q- O L (:3 L O L O
E _._ u_ Q) ul _ In _) In -_ v) Q) u_ _) Q) in In In _.. In U In U In U In
_- ._.O_ n, U ,..v U rv U ,,v 13 rv 0 "vo0 rv 0 rv 0 rv 0 rv 0 _ 0 r,,
E • C _ E U _" U • U C U E _ _ :3_ C_ _ _ _,
_ E ._ ..I L L -- _) L ..J (_ r.. ..J'O L, .J r,. _j --_- ..1"13 ,J (_ ..J (_ ...J _ ...I _
_. _ O._ ;:) 1:I..IC: "-_ _ r" --j .C ;:) q- JC _O.._ :3 ,,._ 4-, _ O -" :::) q- .I-, ::3 _ ::3 ._ ;3 _ "_
•" '_ "_- 0 0 0 0 _D _D _ (0 (D (D _O U
_ • _ (D _ (D 4J (D _ (D + • r-O_ 0_01 r-O) r-O) 1",-01 t,-01 _- 01 E
UUUUUUUUUU UUU UUU UUU UUU UUU UUU UUU UUU UUU UUU UUU U

¢0c;-
r- E
E-.D
_ L
.I2 EL ¢'_ -
_ E
_E
LU _LE
-U-03 E
m in m_
¢.- ® 4_
E O_ E C E _ E O. E IZ E U E U E U E U E L -_ U_1 _ _ £_ _ _ _ _ _ _ _ _ U_E
0 0 4-' _ _ _ _ _ _ _ ¢_ r-- _Z _ Z O. Z Z _ Z _ Z +-' Z _ Z ,'-' Z -_ Z ._ ¢)0 0 0 x 0 _ 0 0 0 @ 0 @ C) @ 0 • 0 @
(n rO _ _ ._ _ _ _ L L L L _ _. L L E_ U_ _ _ _ _ _ _ _ _ _ _ _ • _ E "EU UJ _ LU _ ,,, L LU U _U U LU O. LU _ UJ D. UJ Q. U_ O. _r_J_ E
n, n, n, rv I/) r., rv r., l_ rv n, X (_ ltl 4_
m-® = '; =,_= ==® =_o =co = ; = '; = '; m ; oL_ ,_E O ¢" E O-_ E O q- E O _ E O L E O1_ E O_ E O1) E O E E O _) E =EI_ O
_ O_ L.O _-J0 O._ O n On O_ O_ _-_ U _ _-
UU UUU UUU UUU UUU UUU UUU UUU UUU UUU UUU UUUUUUU

D.
ZXX
0
sO
0
a
E
m
UUUUUU
_0___0_
c0UE
d
if)
× g× "_
_ X _×
_ 0 _0 -o "g _2
C C
0 UO UOU O0
__0_

.G:* U ** X** X*
* _*
C0
L0
U UU
L
D. .w
_ "0 "0 c
r. u u,,w u
L L
> 0 • D.
"0 0 "0 "0
Q. U Q U
* U* _ C L tn m 0
UL0
m U@ @U L0L
0
C
>, LU ,-, _
L 0
D. _ Um U
E _
.Dr
0O C@ >,L O
L0_ C
_ L
U
_ dL LD. +' U
L "_ L "0 L0 _- 0 CO 0 O *O
I/_ L L -_ _ DO• L 4-' UOU _
_- • _ 0L I:L _ L O_) t'-" O) O -
c ,_ _ _ L L 8 O L I_ 4-' L>. _. D 0_ E _ E O C C O Eo E o O D _- :3 o _ L O f0 O D
f0 C U r- O _ @ 0 O I/_ O x C
UU
* E* _ _ _ _ 0 _ 0 _ _ 0 _ +_ _ 0 _ 0 _ _ 0 Z_-* E * _u 0 _ "' O_ '" 0 w 0 "' O_ '" 0 "' 0 "' 0 "' 0 "' O_ "' 0 0 3
* * _ U _ L _-_/_ _-_ _-_"_ 0 _.0 _- _-_/_ _-*"_ .0 _'_ _'_ O C
* • * U £" O U U C O r` U @ O c U _ O C U c- O _ U c*_* U_- O U O U O U O O U U
(/) * I/_*
O O O U U U O O O U O O O O O U O U t) O O O U O O O U t) U O U O O U O U U O O O U O O

UU xU xx Ex
0
O C C
_ UUUUUUU
U
a

0
EL14-
r"
aeat"
C0OxX
Z0
=E0(J
O
00 U
xX
E
U0
°_
UUUUUUU

O)
r,
XX
t,DOO
O_
0
U
Q
X_ X _
_0_
E _ C__ 0 _
_ 0
UUUUUUUUU
f-
O0L
_m
E0 InL C",I
d"0
"0 .0
Q) x _ "0
n• Z.O
X _ r
X X • _ _"0 _ _ _- uJ._ Q)
RI RI _.r,," 0 r,,.p, _ "0 tm
_ _ w t" 0
Z _" Z x4- O_ >
_ _0
U UUU UUU UU
r0
0 _ 4"._ ._ _ .,_
t- c" _ U-_ L (_ X
c- _•_ r ,_
_ X
0 0 ×X
II II
_ Z
.0
UUU U U
0___0_
m
m
x _-
O0
c g
UUUUUUU
__0_


* E*
* X
XE _
_ * O*
E *C
x _ * E*
X _ * E** 0 *
_ * U*
0 ._ *_*
UUUUUUOUU
O
@
U O U O U U O U O U ro U o o o O U rO U o U U U o U U o o
0___0___0_
EE L
(3.
X _-
× ;
1-" I'-
UUUUUUU
__0__

UUC
L
UUUUUU
,N-
•1_ -K-
•_ ,N-
-'x- U "_
•N- "_ *
•x- 0 '_
_ 0"_
UUU
"0
D.
CI.
W.Q
0
4,.,
UU
r-
e..4_
0
0U
&.
l-1
_e e"
U 0 0
4JU
ut
_= I U
3_
0 _ 4o
e-
t- C I-
UU UUUOUUU
___0___0--_

a.
r-3
xx
tpooo_
0
U
@
C
L
m
UUUUUU
•K- ._
.15
.N-
• I*
_ q- .x-
*3=*
4(-
-_" O_
* .O _
•_- E .N-• O*
4(- ._
UUU
L
4o
E 0_- E0 E
0O
e-_ LO •
_ m
O C_ q- I!1
EO_
e-4o
O U
tl- _ L
_- c"
"r._ U
4o
O 0
O_
C C
0 0L L
m
C C
q. q-X XX X
O -O0 _ 0
E 0L EOE_- 0
U
_ C
_ C
O W
L,'-OC
"_O._r'OU
T_U
C _ L
_ oo q-
UUU U UU
__O
4_
O.C
10
OOO O
E {" • 0
_) [1 0 c_ 0
>,_- 18
E O _3 _
0 0 ,,'-' I_ _)_ ._ 0 Er- E
0 0 ._ _-
UL _- E _ 0 L
_ _- I/) L _4 _
L L _ O.Cm_c 0_- O Um _F-_C _"
0 • O 11) _ ,-_ m_--_ n
0_4 a _ EL 0 _U_N ._ L _ E • 0 I/)O.C I_
0 _ m U_DD EL 3 L _ L c C "0 C'O/_ E
L nc E n • D_ 0-_ Cw Q) _) E E E _ n" U _D _ __u N O) D Q) _ D E LU C _).O C" 4-,
Z _ .C O. ¢" ¢" Z _ _ _ _-_ E _ a_ _ _ _ f. O
",.-" E "-" _-_O -_'EL
UUUUUUUUUUU UUUUUUUUUU

6ET =_ mO) U
O_ • _ O.D E r" _.
.c a) 0 13 f. _ _..Q _-
(U E U In
13 OC +,(0 q- _ -_LW 0 0 "0 O _
c'_ 0 C_ c" "0 4,J I,. L 0 N _-
I_ _.. .h' C C "l' D*' U_ "t3
.7:=;"; .- o®_ ®o.,- ,;o" =.- ®®'; =® ,L Q.O to _ _ .. ¢" ¢'-" _.EX ¢-
:3 q- l0 0 _'_- > _3 _ _ _-_(_ C _-_ I_ O_ +_-_ _'0
'_._' .w _ W O0 E L :_ C m _ C _ > _'0_ • W 0 _ W
®..w N 0 E L_'O O E ® w 0 _-- o.o .-_ w-_ m _ _ I'_-
•_ E _ D C: "_ Q) _ q- _ • O C _)_ _ "_ "0
t-q.. E C'_ E t'" "_ O f3 O II bd_- E LU.C D/_ E LU _ X O__ 0 0-_ _'_ I +" _ ¢- _ @ _ +-' 0 _*' 0 U (5 0)_ _ Z _
m*_W.cL m_. • , I1)(- "O _'_ U _'_ H _ ("]O,u ",," "O _ "_ (" 0"0
_ _ O.C _J c L C _- @ _ > L 0 r" C
UUUUUUUUUUUUUUUUUUU UUUU UUUUUU UUUU
C
E
U0
UUUUUUU

@
o.
mID
mi=c"
Xx
o_O_
O
UQ)th
__0_
U0
Z
Ii
ci
m 0
in >E C
0
• U
@1 0 '4-
•_.D 0
It)+-,
_ e- c
0 "_
I1 0
c m E
c U "0
L _ E I _U_ _ E m
D E I E
m x "0 4-'Q_ Z E
_- (D
C
c C c
UU OO UU O O UU O
C@
__0_ __0_


• P .
X •X _
_ UUUOUUU
U
D
4- *X*X *
v" .U*O*
C *
E*E*O*
U*
g_U U
Q-
.6/
O_
4-* L
_ DE _
_ _ _ 0
_CO _0 _3U_ Z _ Z
_C _ _
U UUU UUU UUU UUU
0___0 _
@
_ _ 0
* C C C N L
0 _ 0 _ 0U O
_EL _L _0
_0 _CO _U_c_ Z_ Z
OOO OO
__0_
O]
_ L
_- _- E
-- L L®
_ _ O_.1 L L 4-I-- -_ ry _ ,n,'
iJ _)4- uJ 4-, _- UJ 0.),,¢ #= ?..0_ (,.0 0)'00£_ L Q_C c cu_O
_ c" 0 _- _ 0 _- 3 UT _. Z _- Z
_'E r-.. r-e_O._ D- c ELm
U UU U O U OO
__0__
.p ..
E EE •
_ E C N0 _ 0
_C 0 _D 0 _ D_ Z _ Z
_E _'-
U UUU UUU O
_0__
L

_0___0___0_ _
>,
_ O
g
C _) N LD _ D 0
r c __
L _uD L uJ D 00 I-- 0 I- U
_- Z _ _1... Z _-
E _'_ _J>C >in
C mD _D
UU UUU UU
_ _ o
_ >
> _ _ = _E 0 0 • E L
> _ > _ _
_CL _DL _DO _EL
_ Z_ Z_ _ C_
• E _ _ LE
_C _ _D LC
U UUU UUO UUU UU
_0__
L
n,I,U
I,- CZ D
4_L
O U
_0___0__mO000000000_

L0
O L.1_ 4,JU
_ L 4_
_ > L L
'1o N L
X L '" O_ 00 _- _U_- Z
C0 D LD
•_ OO UU
C_
Q 0
C 0 _-_ _0 _ 0 m _ • _
3 D D D 0 _
_EO _-_0 _o _ __ ZC_ Z_ ZL Z-_
_E _ _ Eo_ oc o_ _m_ mD mD C
U UUU UUU UUU UUU UUU
• EE
C c"
_ N N
o'1_>
D f- f-
E'O >__EE_-
r" t'- .
N Q) _) .i-'D N N
D e" c
E_>• EE -
_" C E
X N N _)x _ D N
Z "e_" -
X u,.
x __eO0
"O "O
UUU UUUU
_0___0___0___

x
xO g)0
C Cg) g)
OOUUUOU

ak
4_
4_
.ZC
a_ X* X
I_ C * Un _ * 0
C * C
X O) * EX _ .W-E
_ O¢O _- * U
L _ L
UOUUUUUU
U
O
4_
4(-
.IF4__F
* :3._ n
.i_ Lu 03
.#- uJ
.k- F- _-"_ Z
O0 000
C0
C _
E n _)
•_ C _ _. on O.
ne ry c" n_ 3 ne U)w _) LU _ uJ 0 u.I _
I.iJ -_ LU L LU L UJ_I-_ I- 0 t.- 0 I-- o,-Z Z_- Z_- Z
c C: C
UUU UO0 UOU 000
_" EL0LL
L0 C
x ,._
4.-C O.
0
C _0 0 .D
> 4.o =
•_ 0 _ __ 0
d " _ dL _
_Lc_ c d
C_Ol_ __ O_ .i_
L._'O v) .0
• .C_ LC 0
• _ O O _) -_ c- _ L
_) OE nr" x 0')n_ L_ L _ ev c D _ x _mLUO 0)_LL laJ_ x
EI-- _ _ 0 _ I-- _-_ _ oZ _- C O. Z _- _E 0
C_O0 _ _I _
U U U U UU U UU U UUUUUU
_0___0___0___ 0___

C C C0 0 0
In _ In0 • 0 @ 0 •
L _ L. _ L E0 _ 0 _ 0
In m In
UUU UUU UUU
c_
q-Lxx
oo
o
UQIO
L
_0U _
O
• Lo
_ L
C _
C__U
• E_
U >_
_ 0 _ E
U U _
C _ .
_ L L._-_ _ _C
U
UUUUU UUU
_0_
EO)
UUU
LnO0
UU
EE_O>
E c-
Z ._:
_£1.0
4_1" 0
00_-p r
UCI_OLC
U_
_CE
0_0
_10 _r
0 L L -_'O. OOE_
O_
WUU _.
>. >.c _e" e- U_
_ >
UUUUU
C_m o. ro:3 _) _) Io .E
.C 0._ 0 .E C (0
OCL OL
.E_ I/) E in
>(0_ EE:3
x 000. E
_) 4"* .C •>. I/) f" m .I-' m
E.cm • E'OE
O_OX'04- _ _q.._
C_JO .C_.C
_ I/_ IZ 0) 0.0)_ I/) I/) E _4a
_X _ _
"t_X 0J X_- • _00
I/) 0) "P _l E (- L L
_.t-, , _ O) N O.O. _OL LE_-_ U O C00X _ _
,E 4a I/_ _ O_ _ _ _._UJ O_ _ E.I-* UJ u,.. __,_ 4- _ _ _ _ _ >
n_O _o0 _O)_
I/)4-' O. JE • m _-v)_.
OOOOOOO OOO
m
D
> •> __ 4- E
e>_ L
_ _ _ r _0
v) Z _ E 4-0- O0 • _
O_ • _ O:_ .
£L• £i m • 0 -
r_ _ _ _0 _
_ In O_E .,w _. "E L_ O
"_'O. _ _ _C >,>_
r "Or _ _I_ 0O_ X C O CC_m m _ mvJ _O
Io'- _ O _" 0 • +-' C,_,•_ 4.- x _._• _C _'0"_ _ .'0
CO.O_ 4- _> _ _ _ L_ .-_
m o •_ _ _ O 0
.C _).C E_ +.'In _ _) _ I/] In 0
O _ c" t_ _. C +• "_ C C m m_ +_ 0) _'_ D _--_"1_ 3 0 C_I _ _) (N ._'
+_ -, -P -I_ .1_ ._ .1_ E (_ O L. O 4_ L El+ a _ X L_ _X'_
I/) L E _--- _. (- "- (/] N _Z L") Nr_ X 0 E E4-' E EELQ) E_ • O >,_) >, _ >, _ E_.. Q)_ E_. OL 0}_ L O._ x r _ x O) X _ 4- X E E >,C _-
_) (0 uJ 4- 04- uJ.0_ • w _ _- uJ D _-_ _ I/) 0.._ u4 _ E
I_ O O :_ r _ m _) m O m U 0 X In X
:_ JO _m L _ C X _ E {0 m _ m E x _ _ >.m
UUU UUUUUU UUUUU UUU UUUU UUUU UUU
c_
_XXE EE'_N C
-J E
Lu I/)
X
N

0%
Q.
q-
L0%xX
tpooO_
0
a
_0__
UUU
i. 0%{3X 4-
x _U •0 _
C C• •
0__ _O_W_OO___O_mmmm___o000000000_

>
L
X q-
x _U _
0 _
"g ,_
I- c
UU UUUUU

o.
C
Xx
tOGoO_
0
ID
U
a
___0___0_


e,
xx
0
ID
U

E
E
L
UUUUUU
•)F .1_
•1_ 45•N. .]$
4(.
.N.
*
•M. .x-
•K. *k
.15
4(-
45 ._
-K* .IF-K- .K-
X "_
X
0_ O_
[.)
UUU
Q) m E
O_Lu _
• m 0
f_ t-+a 0 _,t- U L
m r
11(_ CL+" Eq,.- E
C _ O E IB r,.) _
>, E • _OO ._
_) +" Z • L _ Q),4- E
E W Q) t.u 4-,,.-.-._q- E
'" J:: "' O) (0 .....r,,,p q.. ..J_ E_ _o3 ZUJ 0_- _n n ___ _ C]
Z ¢" O_u_ _ (_ _ =E
Q) c" • W E E E ¢" ¢-
U UUO UUUUUUUU
m
Ex u,.,.
× ;U _
1" I'-
U UUOUOU
___0___0___0 _

n
Exx
0
U
_ X _x
_ _ U_
"_ _ 0
UUUUUUUUU
c0
mC
E
LO
D
• _ O_ N- 4-'
.io
L _ L
L nO
O
_ CE _ 0
.Or" ._ r- _.
m L _ 3 E_ _- E
x r _ c-_ E.DLL E c+_ E E
U_ _ _ _ UJ_ O UJ C E_EE _ . _ _ _ -_uJ _ _ w _ _ u_ _) uJ E xI.- C r I..- _ i-.- a)-_ I.- :3 ¢IZ Z _ Z_J_ Z E E
CC
O OO O OO O UUU O O
0___0__
43
0
C0
_3
m
U0L
0O.
0 _-
O.
- _.O"OEO
E C
Ul _,O11 C0 ._ E 0n X L
C _
O Z EO _-_ _
_ X
C
U U U
"0
OOLO.
c_
O
E-
C E_E • E
E n,•_ ILl4-
_ _0X "'
EO Z_
® E
OOO OOO
C
Z'_
0..c"
0
0 O._-x,,_ x
C
UJ L LU-_
UJ _ D.
Z_ ZO_
0 I_
c"
O0L_*
0EO
GE
"10C
.io
,ioe-
LL
U
4- LL4- OU _
r_
LU L
I--U r
E_
r"0
ODL4offlt-oO
L
C
L0
•_ L
Z •
O L_ 0
"'EE
Oct"
.on
UUU UUU UUU UUU UUU
O___O___O _

I/]
E
UO
"Of,.00
L
¢-4-,
c"
133
E
qJ GJ 0 0E_ E _)
Z f- Z OO O
(_, 4-, (/T _)_-_ • U
LO _fv L c_, L
0 _. (_
LU uJ..I _J ..J q- _flO E nn _- "0•-_ -n o
"0 E_c- _ a)• _'0
UUU UU
c
X
t-inE
X
I=
.LI..
_0_EX_
E
4-, C
C E
4at-
_ E
t-
_ L_ U
_.Q 4_ mE 11. m mx x _ EX E
"_ • X _,-4a X 4-,
Z_ EO O ._
t- _"
U UUUUUUU
_0___0_

Q) XO_ tO *
X *
E *× _ *X _ _:
_ UUUUUUU
U
Q
-R t[-
•# ,i_•i- tl.
t(-
.ifX(0 .)(-E.X-X ,x-X .w-
,w-
U.wO*
,,w-aO._
(-.O.x-
E*O*U*
U U
ul
O)..C O)> _) .C_x> _U(0 >'_ E_ ('-4::: x
0 O) x
L 14JCO0) (..0_ Z,,,r_ "'0 0
x
U UUU UUU
>C
>x
t=
×
× _
xx _E
U W0 _
o_
(- r-
UU UUU UU
0___0__

UE
E
L
UUUUUUU
4¢
4_
4F
4_
U_
E_X -N-X "N"
"N-"-'"N"
0"_
r_-X-*
O_
E_0"_"U-N-
,N-
•Io ,1__'J *
U U
L
>
"" 0
O
* 0 ._ r_ (0 > E _ ._
cu_ > _ X EI-- _). r_ L ev _) _ X 4-_'_ _ _ uJ 0') x
_'U _JO U.l_ 0 __
"I- O) Z Z _ 0
0 0 0 ._ q-..00 _ "0 "0 "D
O UUU UUU UOU OOOUUUU
_ _ __ _0_ _ _ _0___ 0

@¢3
o.
t-O0EXX
CO
O_
0
ID
UO
C00E
E
L
UUUUUU
C00EXX
00
5c-oEE0U
L
gU
C _
w_ E
* _ 0 L* _ E 0* L E
* _ C 0* 0 0* 0 _ 0
* m m* _ _ L 0* L @ 0
* E _ C E* • L _* _* _ • C* • _
* 0 _ • E* 0 • _
L E > __ • _ _ -* 0 _ 0 _ 0 0 _ m* 0 • 0 0 0 0 • _ C* E E E 0 E _ C 0* _ • _ _ E > O _ O* E L _ U _ L L 0 E
* Z _ Z • Z 0 Z C E* 0 0 D 0 0 0 0 m* _ _ _ _ _ 0 _ 0 _
* & _ & 0 _0 _C O_ x E* _ _ _ _0 _ _ _ X* _ "- w _o _ ._ _ _ x* _ > _ _ _ • _ C_ _ _ L_ Z E* _ _ _ • _ • E _ 0-_-_ _ _ 0 0* _ D L D_ D_-_ D O _ L _ C _ O •* O E_ O_ _ 0_ O EOO Z_L _ 0
* O0 OE O_ _0_ OE* O0 0._ O_ c_ OD _
EE E_ E_ "_E@ EC C CO @
UU OUU UUU UUU UUUU UUU UUUUUUU
_0___0___ 0


0')
Q..
"0
XX
0
lID
U
>
t-OU"(3
Uif)
,io
m "(3
"(3 N×
. ×
m O
C
U U
"O
fflE
E
P
"(3C_J
UUUUU
0 _ (_1_"

E
E
L
UUUUUU
r_oo
EE
c-X _-
× _U •0 _
n __
l- e"
UUUUUUU
_0___0___0__

O_
o.
N
Cxx
0
ID
U
Q
* 0
.w
* * GI
: =* L L_
. r-. ;.. E
* X* _ C"N * _ _-" E 4- 4-
* "_ "_ _ 0
c * O* c_ I'-
_- *.0- 4- _ n- E
E * C* n, :3 _- c* 0_- Lu _ _j _
4., ,_ _u _ __ _ _- _ 0
UU UU UUUUUU UUU UU UU UUUUU UU UUU UU UUU U O UO U UUUU UUUUUUUU UUUU

XL L L t- U] X4-0 D'_ CO G)_ O U n_
tw L rv_ rv._ILl L_J_ LU
UJ_ UJ LU_k--_ l-..l_ ;.-._Z_- ZC Z_-
I_ O n
UUU UUU UUU
4-,0
(Z
UJ
Z

O_
o.
N
Cxx
o
U
NN
CX 4--
x _.xU •0 _
-g ,_
C r
UU UU U U U
0___0__


__ r0 _0> >-_L 0 C
_ L_) -_._ _r_
0Z
L 0 O"0
X 0 D
f_ ._
_ 4o
_J
_ "70
4o l_ L
• 0
000 U
_0_
0
O"
0J_
E
U
L
C10
LO.
L
X
0Z 00 O.
_ _ X
.J U) Zm O
e_ U 0
r"
>
UO UUU
ffl
00Xx ._
U •
0 _
"0 "_t- t"
UUUUUUU
__0__

L
UUUUUUU
@
if*X *X
U*O_
n.
O*E*E*
U*
U U U 0 U U U UU 0 U U U 0 0 UU U UU U U UUU 0 U U OU
O
O.
O.xX
Z
0
O.xx
E
O OJ0
"g ,_
i-- c
UUUUUOU

O%
xEEQ.X×
0
U
X
_X__X_
X *
E * U**0-
*_*
_ x
>, O.
d o x_- E XE × E
x_J_ x m= nE_ X D.::=_ "_ XD._ x +,
> > Z E.3 0._XX _E 0
_E E 0 _
C C
i= E C C
U UUU UUUUUUU
0___0_

CL
E
@
L
UUUUUU
ak"E-
4_
"X- ',_
•N- ,_
',IF-X- "K-
•X- "_
L
X akX ak
45
• O*
ak
• O*• E _• E*
• O*U 4_
. +,_*
UUU
@L
U)
t-O
_a
ELO
4_
L
0 0'*- O. C
r_ 0 0 X
E U
On
O UUUUUUU
EL
C
C@
@@
S
U
C
,2C
C
4-,C
X×
0U
C L
_- ELnX 4-X
E
O @
0
"g ,_
t- I-
UUUUUUU

0L
0
× _x _
_ L
_ UUUUUU
U
Q

00EQ.
EL
.CQ.
L
U
0
_ LL m
_ _E4." 0e" .e"_ Q.,Io
C O.
,.., _ Q t"E N _
_ O.
QI > e"
C: _ In 0 - 0,.U • L_ O. 0
> _ _ D-Q) 0 c.O. ty L X > L O.
O. cO X _ O.
G) w X "_U ,.J m Z - E
I-- 0 "_ _'_ 3E _ UZ_ O_a_ - 3E _- 0
C E • *0 Q. "D "0
> t- m t- C
OU UUU UUU UUUOOUU
_0___0__

;>*L*U
*X*X
LU *U_ *0
U *g
X _ *E*0
_ UUUUUUUU
U
_0__
_- O- 0000 _- 0000 _- O-_ WZO_O- Z O- Z _L
0 l/) A II V H 4_ _ V A n H _) "_ 0
C E L _ '-" " -- _ > Z ZZ f.-
_0 O-_D Uu_OU U u_
UUUOOOO UO UOUUU UUO
_0___0___0_
W 0L CqL0 _-_O
L
r"
0.0E>,
L0
U U
E0L
E0U
.
C_
_C
_C
"_m
_C
_ _ _0
UUUU UUU
0
C
_e
¢Y
Z
__0__

EGE
a) ,'-'.O
.Q)• I/)
.JO
E•" _om
U_O
c L c-O 00_
q- U f_
•_ r"L OUOO _U_,- Q-Q.W
_ 4._ L E
_ _- E'_
r" Q. _m 0 _ •
10 .. N C
'_ O0 _ _ 4-'
Q._) _) C C: -J N C
_ 0 0 _.C._ _" _ __) O UOOC._U n > (nr'W _)L ..._
OO OO O O O U O 0 O OO
43 >,X
L
• O r" E L
E C O E N
:3 m L _ In
_ O m E (l.
E r" "0 'In L C _'
O.0 "_ 0 In
r _ 0 O_ >-_
0 _ "" _ 0 0 e_ _._ C
W _-- _ N _) > C_),.C N _l _ E • L_ >
_'_ _ _N 4"_ > _ > X _ t" O_ > L
I1 C _ (" O "OD._ X - cr
_.0 Lu _ LU "- _ _ x_"0'_ _ m _ > 0 t_ _- O_ Z u E
uJ w m_- Z O _ Z (_ _) r,.. =E O
_ 0 _ O_ --
•Q.Q Ilia D._ D__ {" C C
OUU OUU OOO OOOO OOOOOOO

L
O
XX
¢0GO
O_
0
,t-
ID
U
Q
* @
_ X __ X _
L
U * U*
_ O*
_0_
L * L*
UUUUUUUUU
_ _ _ C _ _ C
_ E_ _0 _ _ _ _ X
U
_ _ EX X O_ _ _
_c
Z _ _ Z_ _ E Z E w 0 _m _ D Z Z Z 0 Z o
L E E E E E E E C LL L L L L L L L _ _ _ X
O _ _ _ _ _ _ _ O _ _
O UUU OOO OOO OOO OOO UUU OOO UUU UUU UUU UUU U

0 D 0 m
ETO
r" mI1:4o ¢Y D e¢ D
uJO _ mCI-- U I--'_ I---_Z Z r" Z
_ 0
U
.CL)
C
@L
OO UUU OOO UUU OOO UUU UUU OOO UOU OOO OOO UUUUUU UUUUUU

O.LU
XX
O
U
O
U._'O
4-aL_
_ U _O0"E
",: 4-
×_UEO_
E._,_EX ×_e'r-vO'O"
4,J . .
"0 t" C
.(-,_
U
X
4o ._
=g O" IJ" O"
LL
UU O"
XX
E
U0
-g ..
UUUUUU
_0_

,i$
E
5¢--
4-'C
(:i
&L
O.O"
&3>10ElO"

E *X _ *X _ *
0 _ *
_ UUUUUUU
U
,II-
X *X *
U*0_+
n.
C*O*
O*U*
uu
0 _
_ n 4-
L X _"
uJ 4- X
I.-- _ U Ill
_ t" e"
U UU U UUU UUUO
0___0_


CN
W
O.
ELO.
XX
O_
0
;/
ID,r-
0II1
>
x
E_LC
E_
>,4-'10
_C _L Z:
L U
E_O_E
_ID f.
cE _ "_OEL L _'
_ID_-
U_0
r_
r
0000
_0
O.
IJInIZ
E
C
,io
0
&
Eo
E
_ _. × _m ×_- z _
• 0
0 C C
O0 000000U
___0

*x_
XX
X _
L *0.
E * C*
•_ _ 0
L
UUUUUUUUU

O.5_
XX
0
;/
ID
X_ X_
L _ O_
_ _ E__ _ E_
4-C Q;"_ E
ED'-
tO
r,,,_0
T
D.
E
m O)C C
E
L.
4->,
_ 0E E
"P' • Z _ "_E _ _.
O • _t" tn L
_ o
_ _ _J _r_ n, Q) Q) X
O _ '"rE_..0 ._i _ (_ Z
n, 0 _n (:3
0 • _
U UOU UUU UU
0___0 _
.i _-I_ In
xXE
0
"g ,_"0 _C E
__0


*C
*X_X
_ *0
C
x _ *EX _ *E
*0
_ L _
O _ *_
_ UOUUUOUU
* L* O
* _ C
* 0 mC
* O0 _ 0* X X* _L _L
* _E _E
* _ _C
* _E _E* ZD Z_* _E _E
_ _ ×* E E
OU UUU U
_ "O
(_ • -_ _ N _ _ t_
O _ L L L _O _O
-_ "0 -_ _) _ _) _ C: _ C
UJ UJ LU _ LU i_ LU LU
UJ ;.U _ kl.I _,_ UJ_ UJ L QJ L_- _ _- 0 _- _- _- _ _- _Z'_ Z> ZL ZL ZX ZX
0 _ _0 CO L _ N _ ¢_;
L0
C
0
""0r_ It:
_E
O _'_
Z Z'_"O O O •
_ w_ ku4 o
'_ c C
UU UUU UOU UUU UOU UUU UUU UUO UUU U
r-
In
N
L
.XL
L
d0U
E_
d_noOmX L
E -15
_cc •
XX -
i-
IgO -
OU

C
m
X
×U0
C CW W
UOUUUUU
_0_

EL
XX
tOoOO_
0
U
EL
E
L
UUUUUU

L
(-
EL LO O
L "O_3QJ (o L LO_ O O
+J_aJ{- UL L
L L
L WOO
E U U
"13"O
UU UU
c_
4_
LW
_jl__
w.Or,.
'10
U U
U
C
O
C _
c _°_ _
U mE
L _O
E_ _ E• _ E _m m _ _
X _ m×
L _ XX
_ _ O _
UU UUUUUUU
_0___0_

E
E
× _X _
_ L
0 _
_ UUUUUU
U
O
t*
.x. E .x.-
_k X .1(-
.1(- _' -N.
.1(. U ._* O*
*..0,
"_ 0 -.x.-
.x. E ._.-
* U .1(-
UUU
O___O _
E
m
m
6L
E
E 5m _ D.
X n mX m
_. X "4-X
_ 0 _
g c
U UUUUUO 0
__0


(N
03
_0r,
i-
XX
COO_
O
ID
U
Q

>
E
L
UUUUUU
4(-.IFaj..II-
.K.,E-
41-
a_
-K-*
'_ X._- ×
U
Oak
"_ O
-_ E-_ O** U4(-
_ 4a
UU
.R4_
-R
,11-
,II-
U
n,-.. >..D m4,1
_ Z _
11
0 C_. u,- X I/_DCw- _ X q-
LU LU O) XCgO'_ _ Z Eu_ rno 0 -'£
5 5 _
U _ U U OU U U U UO UU U
___0___0__

Q.
E
X
(D
O
(D
UQ)Q
UE
UUUUUU
C
COO.I/)
L OO"13O
"Or"
(/)EOL
c"+''O
.C._4-'
O"O U
mn
U OO,,_I/)I/)l/)
_',EO
r- o
E
_r-LE._ L
r"
UJ _
Z_r"
r"
U
O_
E
1-4.0
LO
@
L
C_0LO.
C
q-0
0
UO
O
8
._
I¢1
k--Z
UUUU
O U
"0 '_E "_'E_ 0 _ 0
4o ...1 ,.J __ '<'O "_'O
._ 4o 4o
UUU UUU UUU U
'0L0U EW 3c C
U
W U"0
o
4-U r,U C.
C"0 '_
f-a _
O .,eU m
L iL _
_ Ur-
c O E UO "_ U E>_ _- _ E "_O O X _ 4.-'
uJ U X -w_ Z ELU'O O _"
Z_ s_ 0
c
_0___ 0___

>13c"
4.=
013r@
13
r
4=,
11
4_
> (n
c _
CA _ CA _
uJ E uJ .w E -_rv L ev X _ +ar_ _ _ x
l.t.l _ x .l_
UUU UUU UUUUUUU

_X*X
0 *U_ *0
*0X _ *EX _ *E
*
_ UUUUUUUU
U
_ o
* - _ o
* _ E Z
* • E _ _ _'_
* _ _ -_ _ _ _ -_ ._* Z_ Z_Om 0_* _UU _ L
* 3D E_ EE* _ _E "_'_
_0___0_
n.w
m,-_ .0
_'_ Ec_ 0
+ • 0
P- ffl
D _ O_
0 DC_ _.reW
E• t_
u) In 0
LO.C "0U.I-' _)
f.._ L
(_ 0m m UE.C . u)LU0) O_m@ "_ _. E "_
-_ L I/)Ect_ m
®u,.. _ t"'_¢"- Q) v,..,
- - "' ";2
4_._ >, _)EEJ_ 4a L
L4a_ O. Ee
I/) "P _I- ._ ",_-I __- • O -I_ E 0 .0 _
O" 0)_ a E :3 _) IZL E
uJ-_ O ,,, L "O E uJ (_(._ L I/) E >_ -.I q- I/) _ .J.Oi.u 0.@ U I:O _) • cOt--- -- _ C ::3 >_ L In D _)
O" E U .,'-' O 4-,
L 30..E _ .Eq- I/)1/)4-'I/) In
> _ ZU_
• ttU LO_
UUUUUUUU OOO
__0_
mZ_ Z Z
0 0ME _
_D _0 _0_-_ _
O_ O_ O0OC O_ 0
0 _ E
UU UUUUU UUU UUU UUU U
__0 ___0__

F
J
4_
60L
_r&_U
"O In'lOO
"O In _ 13.0
C _ L
_ ¢" C.) 4"_+ "_ O'_ q- q-L • C 0.._.".*, ,,, '*'_ _- OIO .(-' :3 ¢'-_ n,._ x._ 0 +.'
•_ 0 O. :3 :_ X 4-' .ry r,' c" 0 n,'w- 0 0 _ - X W-LU _) UJ O "' A LU _.Q. O'_ x ,_,C','3> E3-_ A _ >_ ,--I O O Z _ E
Z'O Z O_ Z_-_ 0 =E 0
UU UUU UUU UUU UUU UUUUUUU
_0___0___0_

_0
_X*X
_ _ *0
X • *Ex _ _E
_0
_ UUUUUUUU
U
Q
Jl-
4_,w
•_ 4o
• 0
• ZO
• I.u 0
• o.
• I.u 0• ._I r• nn _>
•_ 0
• >
. r"• 0
OU
ZO Z_ ZO_ O0 OL
O_ UO __0 _'_ _O
_ _'_ _0
_L OX 0
O E
UUU UUU UUU U
_0___0_
>c"
U
U
InI/}
X 'FaX _-Xz
_E O_E 00
UU UUUUUU U
__0_

N
mD
* * E E
* _ W G)
* * >, u3 m
u) In u3* * "O C
* : "_ E _ E i* * In >,
* * 0 c L
. : _- g o
* • o ® _ ® _ x* _ (J _ _. _
* * _I 0 ;_ _ _-_-_
. .p
* >_* _ OJ W O 0 I0 C W'OU
* X* O _, "00 _ _ ,_ I/] Z -_ ".-'_ :3
* C * n, _ _ _- n, _, _- E _- _- 0 _- 0 0 _. X _-
* _* -_ 0 L 0 r''O C m O m O U, u "13
* _* U 0 "(3 _
UUUUUUUUU O UU UU UU U UUU UUU UU OO UUUUUUU OOO UUUU

X
X
X _ *
_ UUUUUUU
U
a
@ *
•N *
•1_ tl-
tl-
@
X*U*
X*x
O*
.Q*
O*
O*
U*
U U
0 L _L_ 0
Z Z Z Z_
0 0 0 OL
"_ 0
OE QU Q_ O_
L •
L L o 0 L (_ L"0 -_ 100 LE tO_ m m _L
•_ • 0Z I_ Z Z O Z 0 Z _ Z Z >, Z+'0 L {D CD • {D +_ (D • (:3 (D'c-' 0 O
{/)_ {/i (/) _/I_ _n _ _ (_ (;I> ¢_I_-
U E _JL _ _ U L U C U U_ U ELu _ "' • _" _.. uJ _J • w L w O "' 0
n (_ _._ n nO _- • a._ _.-- {1.+-'
-J _ "4-' -J E -- _:_ .J L .J .J L --I_
U UUU UUU UUU UUU UUU UUU UUU UUU UUU UUU UUU U
0___0_ __0___0 ___0__

_0___0___0_

Q)
Q.
4_E>X
X
tO
O0
.v-
O
E
>
@
Z
L
m
OOOOOO
,K,
•_ E -K-•_ >.__ X__ X _
• 0-_-
•_ O*
-_ 0"_
4_
U
6
J
11
4_
4oE>
Z0
L_,H
n_O.
LM
rn
0
O O
@
L
@
o
E
OX_
EO
C
o
;=
OE0
_0
m_> E>
_00_
@ EO00 >
-_ XE_._ x"_E_ X_N
_'_L_ Z
"_E_O00_'_Em_
_-_
EO
>_
OOO00000
E >>X _-X -_
E
00
"g ,_
C E
_0___0__

* 0. 4.s
* _ 0 0
* X* _
4'
* U* _C O.
_- . o. r,, ._,, L
E * C* _0 m,* O* 0 w
* E* r,,,_* O* _.Q I--
_- * U* "ri= Z
L . L . mm * _* >
UUUUUUOUUU OO O0 O0 O0 UU
*' Zo_,f.. _=
xxE
,XO0
-g ,.
c" c"

_x*
_ O_
E _ _
E _ C_
• _ E_
EE
X u,..
E
0
'ID "0
t- ¢-
(.) 0 fO 0 0 0 0 0

f_
"a"a
CO0.o
U
E
LI.
L
4_
UUUrO UU
* .E-
4_ -IF
•K- ,K-•K. I_ ,,E
_ X'_•_ X'_
*_*
•_- E *
UU_
X _X _
E
O0
0___0_
00
E
L
UUUUUU
•K- 46
44- _
,N-
•N- _-
_ O*U *XX .N-
•_ U ,x-
"_ 0-_
•x- ,CI ._
-_ 0 *
UUU
,_-C'¢
LO_OC_LO
I_LO
O_-
CO
r:
_ °_
4o 4_
r 00 O
(.)X _-X -_
E
U0
(.- _-
U_UUUUU

® E
LCL
EL
_ L
0 _o.
'_" UUUUUU
U
@ *
• .N
• @
• Ee
X• X*
*(.1.
*J_*
, c'. x
• O* X
• O* U
• O* 0
. "g• L*
• 4..,. f-
UU UUUUU
_0_
EL
O."0
11-
4-
"(3C
m
UU UU U

L
U_UUUU
i+
(J
e-4+
W_X
X
U
O_
c_
O_E_E_
O_
f,.._
U U
O_
_ O_
0_
._
_._ e-c _
X 4-X .ca
U W0
"g ,_
r- (.-
W ®
_UUUUUUU
___0___0_

0..Q)T_"O
"0
oO
O00
U
0
r_
X# X_
Ill
X 4-X -_'
E
0
"0 10
c C
0__

L
L
W
UUUUUU
L
_ X _
X
_ O'_
•_ +_ ._ 133 _1_
"_ E _ 11_ O _. t')'_
UUUU
Lc"
XX
U
0
"OC
Ut_O
_0___0
D_
4_E
w-
C®
UUUUU

L E _
.0
_ UUUUUUU
U
0
-IF
4_
-iF
,)F
XX
UO
.Q
4_
c
OEE
OU
4_
4_
U
00
o
o
oLO to
-0 _ _ --0 • - -
0 _ • _ _00_
0 _ I:_ _ _ _c 0
CI+ _ >,2_ O _ >,:_O_-,X X c_ X X X Q._
UU
L
C
UOU
_0___0_

>
X _1-X ._
E
O @0
e- t-
_u _o o oou

,e-
Q..
4.a
r"
510
¢D00
O0
Oo.
¢D
U
L
UUUUUUU
•E- .,K-
,1_ 4F
ak .,_a/,.
a/. 4_
4-_
C *
X *
X *
,_ .,x-
UO*
0 * XE* EE * ._
0 * OU * 0
4° ,1_ II-L "_"
_* _ "0
U UU U UUU UUUU
_0__

__@0___0 _

Q)
0')
r,
m
E
"0
EDoo
o00
_" U
(J
r,,
_X__ X _
E *C__0_
"_ _ 0
UUUUUUUU
EEX 4.-
v
0 _
C C
U U L) U Cl t) U U 0
_0__
C

X
E
E
L
UUUUUU
a/. ak
a_ .R
-K- -M-
.IF
. ?,4F 4_
t
X .N-
•N- _ .N--N- E .N-.N- X .N-_ X'N-
•x- .lg
•_ U "x-"_ 0"_
'_- C t(-
•_ E _-'_ E_
OUU
X
_ X
X O) X _-
> X -wC E
C CW W
___0___0

_J
UIn
"0
_DCO
O00..
ID
U
E_
UIn
E
L
U U UU UU
_" X'_
•X U_
"_ 0 _
'_ 0 "X-
UUO
>
r
0
4oQ.
[,,UIn
"(3
0
0
O._m
-,-,04-'
"0 "0 "0
U
0U
EX
E
U W0
UUUUUUUU
0___0 _

C0
0E
E
L
UUUUUU UUU
CC 0
0 00 EE
X× _E
U W0 _
l'- e-
UUUUU_
___0__

O..
E
C"O
"O
(.gCO
01
¢0
O
_" r,3
O
r',,
_®._ E _
_ C_X
_ X_
* _ E
_ C_ X_ O_ X
* S __ O__ O_ 0
O00000000_UO
__0_
E
C
4-
o_
4,-
C
00000

N
C
E
L
UUUUUUU
.IF
_t
4+
$+
.R
N
q-rxx
£J
O
JD
"(3
C
OEEO
(3
,io
U
_t
4(-
t+
t+
,I+
,)+
4(-
0
IN
O4
N_'_ N
•h' q- c
C XD X
E.X
4-_ O
"(3 "(3t- C
U (.) U 0 U U (.) U (,)
___0___

C_ n0
n
Xl E0
_ 4o
0
tl
a
L
_OUUU
•I, .1_
•_ .x-
• X_
• X _
v .
• U*• O*
• _* X• O* x
• O* U
• U* 0
t* L t*
_0_
0
_3
W
UU_OU

C
L
E
L
UUOOUU
-K-•N- .W-
:k -N-
•N- .W-
-N- -N-
.K-
.X-
'N- -N-
•N, -K-
•W- .X-
•K- "X-•N- L -N-•N- t_ .N-
•_ X "N"_ X'N"
-_ U "N-
•_ 4-' ,X-•N- _ *
•x- E ._
"_ 0"_
UO0
O_O0
_0 _ x
C C
___0___0_

o.
EL0LCL"0"0
I,,0O0
O00°.
I,D
U
E_
0L
E *
L _
UUUUUU
-N- .1_
•w ,1_
•1_ 4(-
•x* ,_
0"_
XX
U_O_
.w
C0 _+E_
O_
4o .I(-
U U
0
xx
U0
.0
"0{,,-
UUUU
0_
0f.O.
q-
"0
QJ
UOOOU

> *L *
U *
_ *
L _
UUUUUUU
_4_4
* _ ,'0_3
.1_ * oO , •
-i_ • "0 "t3
._ * -oooo* ._3"0
. : _'.>. _4ddU * • , ,
U _o. gdd -
* • • • 0
* . . >
_* C _J O _3r
C * 0. O0O0_O._ X _-0 * _0"0 _3 _3 _ X
E* -_ . • .0. EE* cq (_ C%1 __
U _- a_ • " "'_ 0
cO* "0 "0
UUU UUUUUUUU
___0___0_

0
C0
E
L
0
OOOOOO
U
O
•E- ,E-
.,E. ,N-
.IF
•IC- ._,K,-
• Q) ,Irr
_k X 4_• X_'_- 4#
_ "I0 *
E "_
UUO
,,.CO
CC •
•'0 t- X
o'_ _
e- c-
oclooouoo
0___0

L
E *
L
UUUUUUU
[L*
> *X *
vU*O*
JD*
• E L
C:: ,,w- X0 * XE-w. EE -w .._
0 _ O O_O* 0
L t*
UUUUUUUUUU
___0__

0%
a.
X
tm
"0"0
lOO001
O0
0
(0,I.-
U
O)D
* ** .
,w .w
.I_ .w
._ .w-
.I+ .N-
-N-
.x- .I(-
X
"_ X __ X ._
tl. 0 _
"_ 0 _
_ _ 0 _
0
6
0
O_.
_ XX C1
D C LO+ _ __0._ Xc_ X
1- r
O_W__O

L
E
L
UUOUUU
•w- X•w- X 41,•N- .N-
# _.' .TW-_ U'W"• O'N""N" _ "W"
"W" ¢'_ "N"
"N" ,'_ ',W-
•_ "0 "N"4+
• - E.N
UUU
t*
-I+
0
O.
L ."_ XC ×
_ C
U U U U U U (.1U U
___0___

>0U
>0U E
0 m
U_UUUU
U0
.E-
4(.
•IF ,_4F
.E .E-
.E
•N- 0 {_ U-X-
_" X .M-.K- X _
•_ O_
._ r-_•_ 0 _
_ 0"__ O.K-
UUU
60 _
_ B
6 o
B _O,
0
.._-_
o ;6 o_0 *0 _
-_-m_ O_O. -.0.._0 00_
• _0_ ....0_. 00_• -.0 -_,
O_ O_ .__-0 -_ 00_
_eO_40_0- _
+_00_-._._.
0 _.I
> O0 C
_O0000 O0>_-0_ .... O*Om
0000__-_.-_
>> 00 UUInx R-
x _,¢
C C
0___0__

00
___0___0___0_

EL
EL
E
L
O°.
UUUUUU
U
Q
.K- ,_
.E- ,_
.E- .1_
•_ E_
._. X .,_
•_ X -,x,-
• U-_-
• _* E•_- ,,_ * E L
• O-w X ,4-,
• E* E• E* _"
• O* 0
,o.w ¢- C
U UUUU U UU UU UU
_0__

E
E
L
UUUUUU
aX-"W-
41- *
"E-
"IF
"E-
•K- "K-
• E*
• 0,. "M"
XX -w-
.x- U ._
-_ ,.Q .K-
•K. 4.o .X,
* "O -_-
• O*• E*• E-X-
"_ O -K-• U'K-
O
o.2"0-O0
._1
E
_'_ X _-
ImlO E
•l.a .l.a 0
r'- t-• •
___0___0

c-
m
co
oo
o,.
u
r_
* X_* X_
E *C * X
* O_ x* E* E
* U* 0
L * L*
UUUUUUUUUUUUUUUUU
_0__

>
E
Z
L
UUUUUU
ak.E
4F.16
.x-
4_
?,4_
"K-"E-
X
* X
U
* 0
-K-
* 0
* E* E* 0
U
.N- f..
U U
0
-K-0
x> X 4-'
m E
U Q_
C C
UUUUUUUU

E
0 m *.o
OUUUUUU
0
0
•1_ .N
E*
X *
O*O*
n.
*
_0 *"0-
*t" .
0 *E*
O*U *
ill *
U 0
0
0 E
X _-
x
0
I- I-

E
L *
O_UUUUO
4(..)(.
4(-
; o
* o
E'_"
X *
U*
O*
n.
,t o .1_
C *
E*E*O*
ffl .*
UUU
0
O__ 0
,0_
_0__._ 0 __0 "_
UUUOUUUU
_0___0__

_)
0) _,-(0 0
o _
°_
lip u,.
0..
'_" 0
U
D
* 0 _*_
XX
* 0 *
UUU_UUUU
q-
u,. 00 _4,-'Xx _
U0
-g ,."_ "0
OUUOUUUUU
0__

*0-
* X *
E *C * X
* O* x
* E*
* O* U* O* 0
L *
UUUUUUUUUUUUU
II)
.to
@
C
@
UUUUU

m
E
L
°.
uuuuuu
u
D
.N- _ .N-
.N- X_Sr X .N-
e E
* U
U U
00 -
0.00
_UU x
_0___0_

×
L
UU_UUU
.+
4
tl_ t'N _
8o* ^: 8O* ..0 - -
O* (__
¢ .
40
_00 UO
X
X U¢b >>X _-X ._
0 Q;
0
W _
LIUtI_UU
___0___0_

cOO-
tOO0O_010
_DU
_D
>
E
L
U 0
*_* 0
* >** X* 0
X
* O*
*_*
*0- _ X
*E* > E*E*
* O* _ O
* _* _ _
* L *
* _* _
OOOUUUOU UUUUUUUU
(0 'Q" I_ ¢D _ O0 _0___

___0_'__0--_,_ ___

O0 0000 00000
0000 _ 000
_ _ L __ U U U U_U U U U U
_U U___ U U__
...... O0 - - -0000- - 00000
oooo ..TT_TTTT ..TYYY_
_ U UO__ U U __
U_ __ _ U _ _U U U U L_ EEEEE
EEEE
X _ C C_ _ C C _ C _C C C _C C CC C CC C _
_ UU UU UU U U UUU UU UUU UUU UU U D
UUUUUUU UUUUUUU

XX
E
U0
L L
W _
OUUUU
OO
L L
Or-e -_UU
UO0
- OO
-L L
Oe-e -',-' U U
Uwg
- lIE
_ U_E
C f" _
•to 4_ 4.s
UUU
U CI U
X _-X 4_
E
U
t" ¢--
OUUUUU
___0__

UX
; _ ×U _C • U_ _ 0
_ L L
.o_ OUUUO
U
Q
0
0_._
c" .K- _
7_.
-(" L
0_1"
UcO
_g'8"_" 0UU -
UU'_"
c- e- l"
4o 4o ._o
mmm
OU
0 U0x
× _U W0 _
&l u,.
t'- f-
UUUI.IUUU
_0__
C0O
E
L
UUOO
C0U××
,xU0
.O
4.,,I/'J
U
0
L
,,CU,'-.
0
. r-U
O-
f,_ •1_
U
t- ,__
_c_ UU_
t-.
c C._ ._.io ,Io
U U
U U U
cc 00 UUX .-
,.eU •0 _
3 ,-
c C
t}UUUUU
___0__

.e-
a. "0 i_'Z3x
m _ xE
C • U
_ L L
_ 4.,' ,_
_" UU UO U
U
O0
t-'_"U U
;bC_Ln
O0
C" I-U U
×.1:1
c" t-
._o 4o
m _
U 0
UU U
_0
cO_0 4-.,
tO "0"0x
xU0
-g ,_
l- c
UU_ LIUU
0
_ 0X 0
_ × _• U E_ 0 _
L L
UU UU U UUUOUUU OU
___0_

0
L
U
0
L
c-U
C_O.
L E
E _ X C _L _ X "_
E _ X_ X
_ • -
_ UUUUUUU UUUUUUU
U®

___0__

Q.
®
q-c-¢-
oOO_
O_0..
(D
U
r_
0 0 0 0 0 0 0 0 0
LO0 LO0 LO0 LO0 LO0 LO0 LO0 LO00 0
_ L L: L L: L L: L L: L L: L L: L L: L L LO0 LO0:
_U U_U U_U U_U U_U U_U U_U U_U U U _ _ U _ _
_______UU_UU_
7>>
000000000000000000000000 ......
u u L _ L L U L L U _ U U U L U U L U _ U U _ _000000_
UUUUUUUUUUUUUUUUUUUUUUUU__
______ O U O O U O _
E_ • E_ • E_ • E_ _ E_ _ E_ _ E_ _ E_ _ L L U _ _ _--_CN_CN_N_CN_CN_CN_CN_CNE_E__C__C__C_C_C_CN_CN _
JJCdd_CCJd_dCCC4ddCJJdd_ ......
_ _N_CN_CN_CN_CN_N_GN_CN_CN_N---- _ C3DCDDC3DCD3C3DCDDC3DC3_CD3CD3_
O _______ E0
_ UUUUUOUUUUUUUUUUUUUUUUUUUUUUUUU _L L
m _ m m
OOOOOOO OOOOOOO

XX
E
U0
L L
UUUUUUU
0
OOLO
L L_L
UU_U
b_Sb
0000
LLLL
UUUU
_N_O_L_E_
d_d_N_O
_E_
UUUU _ _
C _
UUUUUUU
___0__
O_
ZO_t-t-
c0O_
O
_t
0
r_
oL r,-O_
t'O.l_ L O
U
O- 0 -0
L - LO L
c'Or" L_
_U_
_U E_01
n. _Z) n
•l-'"W 4-_.la'_-_ X 4-
O _"
4"L U O O O O _ 4.-
OO UU UUU UU OO UUU
___0___

LL
XX
E
U0
UUUUUUU
L
4oE
UUUUUUUUUUUUUUUUUUUUUUUUUUUUUU
c" C
UUUUUUU

o.
>
L
t"r
0O
Oo.
U
a
", 0 0"-,
_', L L_
L U U f-
-_OO
L .1: r" e-• U U U
- EEE>LL L
L 4_ ,1_ 4-o
> EE E_ L L L
x _ _ r _ L
E 4.a.m-,4..,+., X 4-
03 U ,_ m_ m E
,,- ,_ .... o° _°'4a UUU U _ 4-
UUUUUUU UUUUUUU
___0__

E
W
UUUU
P_
0vi.
U
0
U
4a
C
L
C
"_ _ "EX _ °_
4-, X
-_ _ ×U _0 -_
L
W _
UUU UU
4_
0
.poE
W
r-
UUUUU
___0_'_

D.
CC
00
0..
U
0
__0___0 _

m
E
L
OUUU
EXX
o
0
o
0
0
_p
"O
0
L
f-
U
E
£
E
•_ x 4-x -_
E
_ .u "_ ;2
r- C
UU OUUUUUU
___0__

_m
Q.
tOEEE
_PoO
0°,
Ua)O
000000
LLLLLL
OUUUOU
000000
LLLLLL
UUUOOU
_3XXLE"-_U'-_EE_
_._ _
_3XXLE_'_ • _0__ E E_
E __ _X ECCECE _ EX ........ _ E
ewwwww xE
_ OUUUOU _L L
_ C E
UUUUUOU UUUUOOU
___0___0

t""U
.
0
¢..¢0
U
OJ:>c"
X >X C
EEX CX -_
E
U m0
_ L
U_UUUUU U
XX
EEXX
E,,eU0
C rW m
UUUUUU
___0__

Um u•_ m
E EU _ X
C • U
_ L L
O m m
_ UUUUU
O
A
O
f" L L
_f'.C_UU
OOO
L L L
t- e" t-UUU
_m f-
"_ O +"
d,2;I1)>_
O._
C CC
4o ,io 4_
m m m
UUU
UU
UU In
E
,IgU •O _
"g ,_
C e-
UUUUUUU
_0__

O0 0
L _-0 _-0
t'.C L.C LU U (_U_
O0 -_ -
UUI_U__._ c_ r
r- I-_O, _0 O- 0-O000_EEOELD_O>OEEE_E
_E .6 .000013OOOOL
C EEOEO0 C _'_E > E0 0 EE_ L ¢- r-E O c- 0
E '_'-" "--_ 0 0_- X C c £_C t- O E4_ X _ "_ " "_ "_ E
•I-' .o-' 0 0 0 0 U .Q _-L L
•W +, _" r"
OOOOOOO UOUUUUU
___O___

D.
E(..C
aO
m0oo
,r-
(D
U
Q
"0
mE
E
a)
q.
L
.i_In
UU
"0
Exx
U0
4.J
ffl
UUU UUU
m EEXX
E
O0
C C
UUUUUU
_0_

E
C _ _ E
C EX _ CX C
E XX
L L
o _ C C
UUUUUUUUUUUuUU
___0_
o.
N
CCC
_I_00
O_0
,q.
O
0
0 0
_-0 O0 L
rLOLLO._
O0 -00 -"L
LLOLL. O r
UU_U U_.
-...,,_ U _. _. U 4,a
E O.- "0 C- "__ O X L_4_ Lt- u,- U) O L O 4a_-_ O_ n_-
Enx'o_-_ON • 0 _ L_ 0_'_
N C_'-O0 L_ L
_" 4- 141
4' X "_ -_ "_ -_ -_ -_ _ ("E 4.-' ._ 4-_ 4-_ 4-. ,,I-. 4-_ X u.-
0 v-- U
_ _ f_4-, U UUUU U U _ _-
L L
U U U U U UU U U U UU UU
___0___0_

L
C LX _x
E XX
U E
L
UUUUUUUUOUOUOU
___0_

.00Ct-"
0o.
.,,..
I.D
U
CI
0 _0 _X _ 0x 0
E XX
_ 0 _
UUUU_UUUUUUUUU

×0 E0
_ L
_ _ C C
W m _ _
UUUUUUUUUOUOOU
___0_

L
t-O
L
O
r"U
XEEQ.
¢)
0.
XEED.CC
(D00
O_0
UQ)0
x EE X EE E _ X
E X E_ E E
x G E
E _ X
U _ EO
L
_ C C
UUUUUUU UUUUUUU
___0__

O0
L L_ c-• _UU
• -O0
L L t-t-
• 0_ E
_0_ C_ O _
. o f,..laG) O QJ I_O)00 "0 E
•1a (_ _ I_ l.C: 4-, nO 0J4-L C: _ U.C f" 4_
4- X C C: C C: _.. I:_•Ia X ._ -_ -_ ._ C)
•,-' .,-' o_uu _ _-L c
,,_ 4-' C r"
UUUUUUU UUUUUUU

a.
CL0LO.C
COO_
O_0o,
CD
U
C_
O0 000 0 O0
L L L L LO LO L L
_ r'O C C c L f- L.C cO O--- O O U _ O _ O O
-.._ _ _.._.-.. O _. O_.
_c_ U c_ c_l c_ _ c_ "_ c_l _
00- 000 -0 -00
L L -L L LO LO L L
c" c 0 t- t- t" L r- L c r-U U.-_ O O O _ U _ O U
_'_ _1"_'_ U'_. U_.'_
0 U I_E _-_'_ E_L,L _- (_ L 0 _ Q)_ (" 0
r_ O..Q (1 _.. _.. _ Q._n 0.'0- - U_ - - il- il-
il
0 I1 > _ U'O.C E L _ _ > _L 0 _- ilil_lilr_ (lO. ilil_ ilil _. Cl 0
4- X r- r- c C c- C r- c- C c- r" __ O.
E 4-
_ 0 ,,e
_ O U O O O U U O O U U £) _-L L
_ c c
U U UU U UU U U UU UU U
___0___0__

___0___0__

o.
L
UCTCr
¢Doo
O_0°.
U
LL
UU L
X U
_ × _×_ x
W U_ 0 _
0
L L
UUUUUUUU
L
UO"
u_4_E
u_
c-
UUUUU
0_

C
E
L
UUUU
mr".c UU_
.
-0
L r"fO Ur'_
qjr-
O.m
-Oi-
I)J EIrm cO1 c W
X C C _X _-_
4-J 4-p X _-
Eo
== oU
L
•_ r" r
UUU UUUUUUU
___0__

r,
.Q
CC
Go
0
O
a
JD
O"
L
t_
U U
4-
xx
00
-g
L
Xx
E
UO
C C• W
UUUUOU
0_

___0___0 _

X0% O.
r, L
X 4-
C" E5_
C
4-O0
L
O
U
Q
0
LO t-
LO r
t'-- L _
i.-- 0 •__-Q.Uio (.- ._ L
X L t" _K:). _ L U¢-
X t" _ ("X _
_" O) O) O)
0
_ U IJU
4om
UUUUU
Xx
C LLXX
E
00
C C
UUUUUUU
__0__

W
LL
X
×
0
UUUUUUU
0
0_-0
L.C L
,.C _ .C
m
-O0
OL_-
L t- I"_UU
• _ f',
q- 4o 4_
C_C
_-CC
.FJ 4.J ._
UUU
0
(3. L
× _
0
C C
O0 UU UOU

@ >0
> _-0
fflc @t- _
_ L
0 _
'_" U U
ID
U
_0 __0
O_L
LU_
°00
OLL
_UU
-00_UU
._6_00_UU
U > 0
x CCC U mx .... _ _
U _ E
uuu _
UUUUU UUUUUUU
__0__

___0___0__

O_
ELO.
c-
O0O_
O_0oo
U
r_
___0___

E
L
UUUU
E
O.
xx
U0
U U U
P_
oom
L L u
u u-_o
L L f"
t'- r" _UU_
I1) 0 ._L 4o t'__- 13. W
L ,l-a .__,- O. O.
C¢"C
U(.)U
E
× q-
× _
C C
¢OUUUUUU
_0__

c
rt-
Go
0.,
O
r_
0
L L L t" LO0 L L
t- t- _ L L t- rUU U_U _ UU
000 LO - -00
L r._ _. c" LO0 L r..
UUU_U_ UU
_'_ 0"_ O U_
r r 0 _'0"_ ×.0
E 1_ _- C _ _____
ecoc_ - -xd
c" E'O.w L C ,.,'.X__ _'
X C CC Cr C CC_ D
'_'_'4"4"_4-' '_'_"_'_"I'_"I-__-' X 4--
E
_ o o.o o o o o o u n __L L
_ r r
U UU U O UU OO UU UUU
___0___0_

0
L
O__UL_
UO
"0
OL
L_mU
U_
>>
E _ X __ x
0
L L
UUUUUUU UUUUUUU
___0__

C_
UE
c
Oo°
U
UE
4o
q-
E
,ha
U U U U
UE U
E "_
x _
0
L
C C
UUUUUUUUUU
Ul _D t'- _0 _0_

___0___0_

Q.
u,.4-0
c
0°.
0
D
__0___0_

0X 0× ×
L
_ _ C C
UUOOUUUUOUUUUU
___0_

O)
cc
_)oOO_
O_0oo
tO9-
UO)Q
0 0 .-, 0","--'-" 0 ,-' 0L L _ L,w.
U U..C U c
O0 - - -
000
_r"LLL
_ u'J._ N N
I_ >, _, >, U UI/) I/J I/) I/) I/) I/)
_- x C cC C C u) D
',m "_ 0° __®
4.-, _ UUUUU _ 4-L L
UUUUUUU UUUUUUU
___0___

___0___0___

$L
?-U
0
L
t)
e->
0%
O.
>CC
O_0
U
a
>
i,h.
4,-,In
U CI
4-1C>xx
U0
qr
,4o
UUU
>
U
>>X _
O0
C C
UUUUUU
0__


CO
U L OL m ¢-E U _ O 13
13 0 _ L 3
° E U _ L "0
0 C
4-' _t "0 0 _ U _'Oq-_ > L 0 "0 C N L
E 0 (_ ¢- _ _- __ (_ _- ,_ _ _" i/)(o _ c- _ E _ O _) c- L (- EO r_L ¢" O._ t- __
• L r L t- f" L _) (" L "_ (D /_ L L ¢" L E ¢- L _) t- L.O ¢" L t- L 4_ c" L ¢- L I_
0 t-- "_ L II 4_ _ -I-' ,_. II _ _,. II (_ 4-_ _. _ ,_. II '_ ._ 4-_ £.. I_ ,I-' _ II 4-' c il +" _-
E _)'0 m "O > 0 "0 0 _.. L c" _ _ >, "0L1D_ _ O O_ OO _ E C m _ _ 3
L ¢'O O O OO OO O U O O O O O
U U
L0U
L
L
00"0t'.-
U r _
U
"0"0
EE
E
t_ _, ('N._
CL _ • •0 L O.L_ 4-' >,U
2L
r'-U¢0
"OL0
4-,' _ E
n • O_D _- 0
O.
li ¢. _" (.} 00"0i_ 0 II 0 I,
@'00 "0 _I.-"_D_ mDUU_O
"0 -_ O. '0 "--, O. _.,-., C_m_ mm 0
.E L .L L..C L (" {.._
D_E'D _ D_E_- _E
•_ _. Ii (_ .I_ L ii 4=, _. iiC_ .E C _ C _
"DO II >30 m 3.C_ 4:: .C
O U U U
60IILe>
Le4:>.._34:: _.
eL ._eO_Ee._ LC
13C

tN
tPGO
@
"0O.
G)t_
D.
u,.
_3
0
tDcOO_
O_
Z_o.r,
0 ._- e,ICN Ol q_l
NN
IXOIX,, "C Un 0.0.
G) G)@CC C
tO _ LO (,p
•-J U I-- u_
3n, _- 0
rCC t-
@
0
_m_mmzzo
cccc_c_c
0o.to
0@0
0__

E
r-
E
4_
[.13 O_@ C_
(II.D _I_- 0"O
f) O_o
c'4-_ L-I-'
_E
EQ.'OL
@ I0 "(3
c 00 33
l/) L
n _ 01.0 @
0 :3 _" --_
0 _o_3 _" .
OO O _
0 (/) _) L N N L_
c O.L _) O.L E O.L'O
O L4_ L Laea L L+a _)
O_E O _E O_E
II 'I-'[..II "I_ _.. _ _"c- _ c- _ N r- _ N
• E cL L "(3
£. L@ 0 r'-
L _ f- (/)0 _ 10
r- L 0c. O _ U
_L P_c_l 0 P_c
II (1_ II _ _1 II 0N_) O_) . _
L L_ E _
_n.c o @ C _ _- O O c E
c- _)r- £2 _ r-D.L&_ Q.L 4a _.Lo D.L_
_) E 0J r a) E @_L4_ _ L4_ _ L4_ _ L4_+a
O_E O_E I/) O1E O_E + a
f..- "I=; _= 11 4"_ [. 4=_ _. II
r- _ "(3 Lr- t- _- c-
Q. o _ 0. O.
o o o o U
• 0_ _ O. _._._O._O O O O0
O O
II II n II Ii

en
EL
n
O.
_0co
0
I=-
Ud)G_
O).X0
O.
0
lZ@a
0
U
L _ q-o _- - d
® - ,,- _ -- o o4-' u,. _ _ 0 t'- 0
= ^ _® _ _ o_i -_ _L C,,I IW _'0 _" > I,n ¢Da, ' I"- _f.. L iq I_ II "_ II _ li li "_ li (_ II >
E O _) (/) L 4a O L 4_ _ L +a O L a_a (/) L 4_ O L ae_ f_ L 4_ O
c O.U _ _D_E 0) O_E'_ _E _) _E'_ _E ® _E _ _E _)
O _.E O. +a L 4-' L 4_ L 4_ L 4_ L a_ L +a Lf... L. II C • li (=" (_ II (" (_ ii f- (_ il _" _ |I {" (_ II C" _ II
eeoc.= z: ._ 4. _ _ m m
• _0._ _ _ _ _ In _ 0 0
_nOOO O U O O O O O2£n_
O O
q.
LO4_U0)
L4-,
II > II
In4-'
O L L L
L .I-o ffl L 4o
OIE_ OIE
,i,-° L 4-' L
L
U "Or"

L0
U
>
0
Z _
ffl _t..
4o t,,- _ CI1 00,,--E_
L C _
0 _.E Q) O)L _O')E
E r.. II C_
LQ.__+'*0D._ I/)
_ I/'J Uq.
uu _

a)ol
Q.
b_)(J(..)boN
EaO L
nL
,_" 1D0 r"
U
a

APPENDIX III
SUBROUTINE NANUALS
III-i

APPENDIX III SUBROUTINE MANUALS
This appendix provides manual entries for each subroutine file in the RELBET
System. These serve as a quick reference _o the subroutine function
descriptions and provide definitions of the calling arguments used. The
manual entries are organized according to the directory names of the
associated code.
The entries follow a format standard to UNIX. As appropriate, they contain
the following sections.
NAil: Names of all externally accessible identifiers followed by a briefdescription of the package.
SYNOPSIS: A quick summary of how to invoke the relevant functions andparameters. Includes types and arguments.
DESCRIPTION: A functiona] description of what the functions do and whatthe options are
OPTIONS: Description of the options when they are suitable for inclusionin the DESCRIPTION.
FILES: The files are used or assumed by the application.
EXAMPLE: Annotated examples of how to use the application.
COI_ENTS: Miscellaneous coments. For example, rationales for thedesign or functions may appear here.
BUGS: Known problems.
DIAGNOSTICS: Warning and error messages, debug options.
SEE ALSO: References to related applications.
AUTHOR: The name of the responsible programmer.
III-1

ROUTINE CROSS REFERENCE
NAME FILE DIRECTORY
Add_GNList
BaseCalTime
BaseTime
Begin
CurSysTime
End
Error_Count
File
FileBaseTime
Frame3
GBeginTime
GDelTime
GEndTime
GMTday
GMTsec
GNLgetName
GetCurTime
HBtoHS
HStoHB
Help
db BaseTime
LBeginTime
LDelTime
LEndTime
MakeTimeLine
Make GNLIST
NTBLCK
,NTCLOSE
NTEOF
NTFILE
NTOPEN
,NTREAD
NTRITE
iNTRW
"gnam I ist.c"
"BaseT ime. ¢"
"fileio.c"
"search. c"
"syst ime. c"
"search. c"
"S t at_msg, c"
"search. c"
"gbhead. c"
"f rame3d, c"
"BaseT i me. c"
"BaseT me.c"
"BaseT i me. c"
"syst ime.c"
"syst ime. c"
"gnaml st. c"
"syst ime. c"
"gbHBuf Move. c"
"gbHBufMove. c"
"search. c"
"BaseT me. C"
"BaseT me.c"
"BaseT me. c"
"BaseT ime. c"
"timel nes. c"
"gnaml st.c"
"nt ran c"
"ntran c"
"ntran c"
"ntran C"
"ntran c"
"ntran c"
"ntran C"
"ntran c"
Message
Time
Gbfile
Fman
Time
Fman
Message
Fman
Gbfile
Coordinate
Time
Time
Time
Time
Time
Message
Time
Gbfile
Gbfile
Fman
Time
Time
Time
Time
Message
Message
Product
Product
Product
Product
Product
Product
Product
Product

ROUTINE CROSS REFERENCE (cont'd)
NAME FILE DIRECTORY
NTRWRL "ntran.c" Product
Prime id "search.c" Fman
Radius "search.c" Fman
Save Str_Buf "str store.c" Message
Second id "search.c" Fman
StatErrExit "stat_msg.c" Message
Stat Msg "stat_msg.c" Message
Time "search.c" Fman
UNVOUT "unvout.c" Mktape
UVW Cart "uvw.c" Coordinate
Warning_Count "stat_msg.c" Message
a121q "aijkq.b" Coordinate
a123q "aijkq.b" Coordinate
a131q "aijkq.b" Coordinate
a132q "aijkq.b" Coordinate
a212q "aijkq.b" Coordinate
a213q "aijkq.b" Coordinate
a231q "aijkq.b" Coordinate
a232q "aijkq b" Coordinate
a312q "aijkq.b" Coordinate
a313q "aijkq.b" Coordinate
a321q "aijkq.b" Coordinate
a323q "aijkq.b" Coordinate
a32t36 "a32t36.b" Product
• cnvrt "acnvrt.b" Math
adbl2i "acnvrt.b" Math
addANLitem "anlists.c" Message
addefile "stat_msg.o" Message
addptr "ptrlists.c" Message
aero "aero.b" Force
aerror "ingrss.b" Message
ai2dbl "aonvrt.b" Math
ai2rl "acnvrt.b" Math
aijkq "aijkq.b" Coordinate
amenu "amenu.b" Prompts

ROUTINECROSSREFERENCE(cont'd)
NAME FILE DIRECTORY
ang2 "ang2.b" Math
angle_rate "qaatt.c" Fman
append "lists.c" Lists
arctan "arctan.b" Math
arl2i "acnvrt.b" Math
arshft "arshft.b" Math
ascale "ascale.b" Plot
automx "automx.b" Plot
awarn "ingrss.b" Message
berrop "stat_msg.c" Message
binop "linput.c" Linput
bldout "getout.b" Downfor
bsearch_timeline "timelines.c" Message
bwarn "stat_msg.c" Message
c2shl "c2shl.b" Coordinate
car "lists.c" Lists
cart "cart.b" Coordinate
cbody "cbody.b" Force
chugs "xcoas.b" Obs
cdr "lists.c" Lists
cdrag "cdrag.b" Force
cdtojd "cmpdat.b" Time
center "center.b" Files
char2i "arshft.b" Math
cinit "xcoas.b" Obs
clas "clas.b" Coordinate
clsfil "obtfil.b" Downfor
clsout "getout.b" Downfor
cmp2sg "cmp2sg.c" Fman
cmpdat "cmpdat.b" Time
cmvbit "cmvbit.b" Product
coash "xcoas.b" Obs
coasv "xcoas.b" Obs
combine "obsnois.c" Fman
comptw "comptw.b" Product

ROUTINE CROSS REFERENCE (cont'd)
NAME FILE DIRECTORY
cons "lists.c" Lists
constm "constm.b" Celestial
cover file "qacover.c" Fman
,cros "mx3ops.b" Math
ctio "tio.b" Prompts
cvprop "cvprop.b" Filter
Icyldr "cyldr.b" Force
datime "datime.b" Message
days "days.b" Time
days "timedate.c" Time
dayslbc "timedate.c" Time
daysxx "_aysxx.b" Time
dbl2i "arshft.b" Math
dbshft "arshft.b" Math
dciph "_ciph.b" Prompts
Idciphr "dciphr.b" Prompts
ectprt "dctprt.b" Gff
ddna "ddna.b" Noisana]
ddnois "ddnois.b" Noisanal
delout "getout.b" Downfor
dfdata "dfdata.b" Downfor
dfnput "dfnput.b" Downfor
dhms "dhms.b" Time
div "linput.c" Linput
dkal "dkal.b" Filter
_number "lists.c" Lists
Jollar "dollar.b" Charutil
dpfmt "dpfmt.b" Qatape
Jplot "dplot.b" Plot
Jprod "dprod.b" Product
Jprop "dprop.b" Propagate
_rpst "drpst.b" Fman
_smth "dsmth.b" Filter
Jspxq "dspxq.b" Numdis
Jtio "tio.b" Prompts

ROUTINE CROSS REFERENCE (cont'd)
NAME FILE DIRECTORY
dvalue
dvdt
dwnfmt
dxcmp
dxqdsp
dxset
eb2asc
edit frame
egrss
eph2_in
eph2re]
eq
err code
err_hpcode
etsec
euler
fetchbits
fgbprt
fi]e2io
file_size
fileinfo io
fileio
fprtCurTime
fprtFinish
fprtStars
fprtTimeLine
fprtarray
fprtctime
fprtdate
fprtgnlist
fprthms
fprtsec
freeGBF
freeplist
fskip_lines
lists.c" Lists
"dvdt.b" Propagate
"dwnfmt.b" Downfor
dxcmp.b" Numdis
dxqdsp.b" Numdis
dxset.b" Product
"eb2asc,c" Downfor
"filedit.c" Fman
"ingrss.b" Message
"mkinit.c" Fman
"eph2re].c" Fman
"lists.c" Lists
"stat_msg.c" Message
"stat_msg.c" Message
"timedate.c" Time
"euler.b" Coordinate
"ibmcvt.c" Downfor
"gbprtd.c" Gbfile
"file2io.c" Gbfile
"sln2r].c" Fman
"fileinfo io.c" Gbfile
"fileio.c" Gbfile
"systime.c" Time
"stat_msg.c" Message
"prt_uti].c" Message
"timelines.c" Message
"prtarray.c" Math
"timeprint.c" Time
"timeprint.c" Time
"gnamlist.c" Message
"timeprint.c" Time
"timeprint.c" Time
"gbopen.c" Gbfile
"ptrlists.c" Message
"prt_util.c" Message

ROUTINE CROSS REFERENCE (cont'd)
NAME FILE DIRECTORY
fvalue "lists.c" Lists
gbclose "gbopen.c" Gbfile
gbdPead "gbio.c" Gbfile
gbdwPite "gbio.c" Gbfile
gbfcls "gbfio.c" Gbfile
gbfcom "gbfcom.c" Fman
gbfdfc "gbfio.c" Gbfi]e
gbfnew "gbfio.c" Gbfile
:gbfopn "gbfio.c" Gbfile
gbfops "gbfio.c" Gbfile
gbfphead "gbpPtd.c" Gbfile
gbfree "gbopen.c" Gbfi|e
gbfwPt "gbfio.c" Gbfile
gbnew "gbopen.c" Gbfile
gbopen "gbopen.c" Gbfile
gbphead "gbpPtd.c" Gbfile
gbpo8 "gbio.c" Gbfile
gbread "gbio.c" Gbfile
gbrhead "gbhead.c" Gbfile
gbtime "gbtime.c" Gbfi|e
gbtoff "gbhead.c" Gbfile
gbwhead "gbhea_.c" Gbfile
gbwPite "gbio.c" Gbfile
gdisp "gdisp.b" Numdis
gdspop "gdspop.b" Numdis
genout "genout.b" Downfor
gerroP "iegrss.b" Message
iget "get.b" Files
get next frame "file2io.c" Gbfile
get_rate table value "ratetable.c" Message
getangle "qastar.c" Fman
aetbit "getbit.b" Oatape
aetbits "eb2asc.c" DownfoP
aetbits "unvout.c" Mktape
)etdat "getdat.b" Downfor

ROUTINE CROSS REFERENCE (cont'd)
NAME FILE DIRECTORY
gethdr
getin
germ
getnxt
getout
getrnp
getspg
gfcls
gfdict
gfemsg
gfend
gff_in
gffdsp
gfnew
gfopen
gfread
gfrhdr
gftime
gftims
gfwhdr
gfwrit
gmenu
gndsp
grfnpt
gsempty
gsfree
gspeek
gspoke
gspop
gspush
gwarn
harm
hdrprt
hms2ds
hms2sec
"gethdr.b"
"initlinput.c"
"getm.b"
"getnxt.b"
"getout.b"
"getrnp.b"
"getspg.b"
"gfcl S. b"
"gfd ict. b"
"gfemsg. b"
"gfend. b"
"filedit.c"
"gffdsp.b"
"gfnew.b"
"gfopen.b"
"gfread b"
"gfrhdr b"
"gftime b"
"gftims b"
"gfwhdr b"
gfwrit b"
qxmenu b"
gndsp.b"
"pltnpt b"
"gstack c"
"gstack c"
"gstack c"
"gstack c"
"gstack c"
"gstack.c"
"iegrss.b"
"harm.b"
"hdrprt.b"
"hms2ds.b"
"timedate.c"
Downfor
Linput
Force
Filter
Downfor
Celestial
Product
Gff
Gff
Gff
Gff
Fman
Gff
Gff
Gff
Gff
Gff
Gff
Gff
Gff
Gff
Prompts
Numdis
Plot
Stacks
Stacks
Stacks
Stacks
Stacks
Stacks
Message
2orce
Gff
Time
Time

ROUTINE CROSS REFERENCE (cont'd)
NAME FILE DIRECTORY
hptou5
i2char
i2dbl
i2real
ibmcvt
ibshft
icshft
ident
ident3
iegrss
imatQ
imatq
imove
imzero
infmt
ingrss
initin
inumber
invrs
iopprt
ioschk
irot
isatom
isdnumber
isearch timeline
isfunction
lisinumber
issymbol
itio
ivalue
,ivshft
livzero
r!ixatm
ixbias
ixcon
"hptouS.b"
"arshft.b"
"arshft.b"
"arshft.b"
"ibmcvt.c"
"arshft.b"
"ioshft.b"
"mxops.b"
"mx3ops.b"
"iegrss.b"
"qnops.c"
"qtnops. b"
" imove. b"
"mxops. b"
"infmt.b"
ingrss.b"
initlinput.c"
lists.c"
invrs.r"
iopprt.b"
ioschk.b"
"qtnops,b"
"lists.c"
"lists.c"
"timelines.c"
"lists.c"
"l i sts. c"
"1 ists.c"
"tio.b"
"lists.o"
"arshft.b"
"arshft.b"
"ixatm.b"
"ixbias.b"
"ixcon.b"
Product
Math
Math
Math
Downfor
Math
Gff
Math
Math
Message
Math
Math
Qatape
Math
Oatape
Message
Linput
Lists
RELBET/Filter
Gff
Message
Math
Lists
Lists
Message
Lists
Lists
Lists
Prompts
Lists
Math
Math
Input
Input
Input

ROUTINECROSSREFERENCE(coni'd)
NAME FILE DIRECTORY
ixdata
ixdprmixerth
ixfile
ixgnrlixgraf
ixgravixinitixkal
ixmasixmax
ixmisc
ixmoon
ixnflz
ixprnt
ixprop
ixqcrv
ixqgen
ixqprm
ixrpst
ixscov
ixsen
ixsprm
ixsptm
ixsun
ixsvbi
ixtime
ixtoff
ixusys
ixvcx
ixvnt
j2c
j2ymd
jdtocd
jmpcomp
"ixdata.b"
"ixdprm.b"
"ixerth.b"
"ixfile.b"
"ixgnrl.b"
"ixgraf.b"
"ixgrav.b"
"ixinit.b"
"ixkal.b"
"ixmas.b"
"ixmax.b"
"ixmisc.b
"ixmoon.b
"ixnflz.b
"ixprnt.b
"ixprop.b
ixqcrv.b
ixqgen.b"
ixqprm.b"
ixrpst.b"
ixscov.b"
ixsen._"
ixsprm.b"
ixsptm.b"
ixsun.b"
ixsvbi.b"
ixtime.b"
ixtofi .b"
ixusys.b"
ixvcx.b"
ixvnt.b"
"j2c.b"
"j2ymd.b"
"cmpdat.b"
"qaranjmp.c"
Input
Input
Input
Input
Input
Input
Input
Input
Input
Input
Input
Input
Input
Input
Input
Input
Input
In )ut
In )ut
In )ut
In )ut
In )ut
In)ut
In)ut
Input
Input
Input
Input
Input
Input
Input
Time
Time
Time
Fman

ROUTINE CROSS REFERENCE (cont'd)
NAME FILE DIRECTORY
ju12cal
juldate
jultime
kalman
krelo
kreloc
lax
length
lgfac
Igint
linit
linput
lint
lintin
:locate
ilrntrp
llrntrp
Isearch timeline
Ismin
1st
lstfnd
m2qsub
main
main
main
main
main
main
main
main
E
main
main
!main
main
main
"timedate.c"
"time,ate.c"
"timedate.c"
"kal man. b"
"krel o. b"
"krelo.b"
"lax. D"
lists.c"
lgint.b"
lgint .b"
lists.c"
linput.c"
lint.b"
lintin.b"
lists.c"
1 rntrp, b"
"relntrp.c"
"timelines.c"
"I smin. O"
"lst.b"
" 1 st fnd. b"
"m2qsub.b"
"cmp2sg.c"
"eph2rel.c"
"fiche.c"
"filedit.c"
"gbfcom.c"
"mkinit.c"
"obsnois.c"
"qaatt.c"
"qacover.c"
"qanois,c"
"qaranjmp.c"
"qastar.c"
"qasv.c"
Time
Time
Time
Filter
Filter
Filter
Coordinate
Lists
Numdis
Numdis
Lists
Linput
Interpolate
Interpolate
Lists
Interpolate
Interpolate
Message
Math
Coordinate
Charutil
Math
Fman
Fman
Fich
Fman
Fman
Fman
Fman
Fman
Fman
Fman
Fman
Fman
Fman

ROUTINECROSSREFERENCE(cont'd)
NAME FILE DIRECTORY
main
main
main
main
main
main
main
makeDate
makeGBData
makeGBF
makeHMS
makeTime
make gstack
makeplist
match
matq
matq
member
mkinit
mktape
mmxchk
mnthnum
moonup
moopos
msgdsp
mshft3
mshift
mt
mtran
mtran3
mtxm
mtxm3
ml:xv
mtxv
mtxv3
"rdwt.c" Fman
"read_set.c" Fman
"read sit.c" Fman
rlvsrl.c" Fman
search.c" Fman
sln2rl.c" Fman
stop.c" Fman
timemake.c" Time
gbmake.c" Gbfile
gbmake.c" Gbfile
timemake.c" Time
timemake.c" Time
"gstack.c" Stacks
"ptrlists.c" Message
"match.b" Downfor
"qnops.c" Math
"qtnops.b" Math
"lists.c" Lists
"mkinit.c" Fman
"mktape.b" Mktape
"mmxchk.b" Plot
"timedate.c" Time
"moopos.b" Celestial
"moopos.b" Celestial
"msgdsp.b" Message
"mx3ops.b" Math
"mxops.b" Math
"matrix.c" Math
"mxops.b" Math
"mx3ops.b" Math
"matrix.c" Math
"mx3ops.b" Math
"matrix.c" Math
"mxops.b" Math
"mx3ops.b" - Math

ROUTINE CROSS REFERENCE (cont'_)
NAME FILE DIRECTORY
mult
mvmul
mvmu13
mx3ops
mxadd
mxm
mxmc
mxmt
mxmt3
mxmul
mxmul3
mxops
mxv
mzero
mzero3
ndfnit
ndfnpt
ndhead
ndnflz
ndpage
newGBF
newoell
newcell
newpg
ngrss
nil
nitout
nkal
nlist
nnois
normq
nplot
nprod
nprop
nrmlzq
"linput.o" Linput
"mxops.b" Math
"mx3ops. D" Math
"mx3ops.b" Math
"mxops.b" Math
"matrix.c" Math
"matrix.c" Math
"matrix.c" Math
"mx3ops. D" Math
"mxops.b" Math
"mx3ops._" Math
"mxops.b" Math
"matrix.c" Math
"mxops.b" Math
"mx3ops.b" Math
"ndnflz.b" Dsputil
"ndnflz.b" Dsputil
"ndhead.b" Dsputil
"ndnflz.b" Dsputil
"nOpage.b" Dsputil
"gbhead.c" Gbfile
"linput.c" Linpu:
"newcell.c" Linpu-:
"msgdsp.b" Messa£'e
"ingrss.b" Messag_
"lists.c" Lists
"getout.b" Downeor
"nkal.b" Filter
"linput.c" Linput
"nnois.b" Noisanal
"qnops.c" Math
"nplot.b" Plot
"nprod.b" Product
"nprop.b" Propagate
"nrmlzq.b" Math
C

ROUTINE CROSS REFERENCE (cont'd)
NAME FILE DIRECTORY
nrpst "nrpst.b" Fman
nsmth "nsmth.b" Filter
nstrng "nstrng.b" Charutil
nxcmp "nxcmp.b" Numdis
nxqdsp "nxqdsp.b" Numdis
nxtnd "nxtnd.b" Dsputil
nxtnd "nxtnd.b" Product
obcls "obout.b" Filter
oboode "obcode.b" Obs
obest "obest.b" Filter
obout "obout.b" Filter
obread "obread,b" Files
obtfil "obtfil.b" Downfor
obwrit "obwrit.b" Files
opnout "getout.b" Downfor
opnprp "opnprp.b" Propagate
out bias "sln2rl.c" Fman
out coy "sln2rl.c" Fman
out tel "sln2rl.c" Fman
pchrat "xradar.b" Obs
pcpt "pcpt.P" Filter
pdsp "tpdsp.b" Message
pitch "xradar.b" Obs
plotx "plotx.b" Plot
pltnpt "pltnpt.b" Plot
pmenu "qxmenu.b" Prompts
pred "pred.b" Filter
printrecord "read_set.c" Fman
print_record "read_sit.c" Fman
prodx "prodx.b" Product
prpnpt "prpnpt.b" Propagate
prt3mat "prtarray.c" Math
prt3tmat "prtarray.c" Math
prt3vec "prtarray.c" Math
prtANList "anlists.c" Message

ROUTINE CROSS REFERENCE (cont'd)
NAME FILE DIRECTORY
prtANLitem "anlists.c" Message
prtCurTime "systime.o" Time
prtFinish "stat_msg.c" Message
prtStars "prt_util.c" Message
prtarray "prtarray,c" Math
prtctime "timeprint.c" Time
prtdate "timeprint.c" Time
prthms "timeprint.c" Time
prtin "prt_input.c" Linput
prtseo "timeprint.o" Time
pscls "psout.b" Filter
psout "psout.b" Fi]ter
pstrz "tpdsp.b" Message
ptbl "ptbl.b" Filter
putT2 "unvout.c" Mktape
putchr "unvout.c" Mktape
putexp "putexp.c" Lists
pwr "linput.c" Linput
q121a "qijka.b" Coordinate
q123a "qijka.b" Coordinate
q131a "qijka.b" Coordinate
q132a 'qijka.b" Coordinate
q212a 'qijka.b" Coordinate
q213a 'qijka.b" Coordinate
q231a "qijka.b" Coordinate
q232a "qijka.b" Coordinate
q2Crv "q2crvz.b" Plot
q2CrVZ "q2crvz.b" Plot
q2draw "q2draw.b" Plot
q2ecrv "q2crvz.b" Plot
q2fnsh "q2grph.b" Plot
q2grph "q2grph.b" Plot
q21egn "q2crvz.b" Plot
q2lsto "q2crvz.b" Plot
q2msub "q2msub.b" Math

ROUTINE CROSS REFERENCE (cont'd)
NAME FILE DIRECTORY
q312a
q313a
q321a
q323a
q_pop
q_push
qanois
qatape
qcxq
qcxq
qdevin
qdevrl
qdot
qijka
qintp
qintrp
qpintx
qplot
qplt2d
qpxget
qrlptn
qrot
qslptn
qtnops
qtoim
qtom
qvirot
qvrot
qwntrp
qxmenu
qxq
qxq
qxqc
qxqc
qxstuf
"qijka.b" Coordinate
"qijka.b" Coordinate
"qijka.b" Coordinate
"qijka.b" Coordinate
"gstack.c" Stacks
"gstack.o" Stacks
"qanois.c" Fman
"qatape.b" Oatape
"qnops.c" Math
"qtnops.b" Math
"qdevin.b" Plot
"qdevin.b" Plot
"qnops.c" Math
"qijka.b" Coordinate
"qnops.c" Math
"qintrp.b" Interpolate
"qpintx.b" Plot
"qplot.b" Plot
"qplt2d.b" Plot
"qpxget.b" Plot
"qslptn.b" Plot
"qrot.b" Math
"qslptn.b" Plot
"qtnops.b" Math
"qtnops.b" Math
"qtnops.b" Math
"qnops.c" Math
"qnops.c" Math
"qwntrp.b" Interpolate
"qxmenu.b" Prompts
"qnops.c" Math
qtnops.b" Math
"qnops.c" Math
qtnops.b" Math
qxstuf.b" Charutil

ROUTINE CROSS REFERENCE (cont'd)
NAME FILE DIRECTORY
qxvalu
range
ranrat
read_set
read_sit
rea12i
ref in
rel in
rl2beg
rl2end
rlback
rlbwds
rlcls
rlcntr
rldsp
rledit
rlfill
rlfrnt
rlfwds
rlhdsp
rlmidl
r'lnew
rlntrp
rlopen
r pdsp
r_readIrltime
rlvsrl
_rlwrit
rrmefile
irmptrI
Irmxm
rmxmc
rmxv
rmzero
"qxvalu.b"
"xradar.b"
"xradar.b"
"read set.c"
"read sit.c"
"arshft.b"
"filedit.c"
"mkinit.c"
"rlfill.b"
"rlfill.b"
rlfill.b"
rledit.b"
rlcls.b"
rlcntr.b"
rldsp.b"
rledit.b"
rlfill.b"
"rlfill.b"
"rledit,b"
"rldsp.b"
"rlmidl .b"
"r lnew. b"
"rlntrp.b"
"r I open. b"
"rldsp.b"
"rlread.b"
"rltime.b"
"rlvsrl.c"
"rlwrit.b"
"stat_msg.c"
"ptrlists.c"
"rmatrix.c"
"rmatrix.c"
"rmatrix.c"
"mxops.b"
Charutil
Obs
Obs
Fman
Fman
Math
Fman
Fman
Files
Files
Files
Files
Files
Files
Files
Files
Files
Files
Files
Files
Files
Files
Interpolate
Files
Files
Files
Files
Fman
Files
Message
Message
Math
Math
Math
Math
OF PO0.'4 _-!.i/: :

ROUTINE CROSS REFERENCE (cont'd)
NAME FILE DIRECTORY
roll "xradar.b" Obs
rolrat "xradar.b" Obs
rot "qtnops.b" Math
rotate "rotate.b" Celestial
rptost "rptost.b" Fman
rrrfile "qaranjmp.o" Fman
rst "rst.b" Coordinate
rtangl "rtangl.b" Obs
rtio "tio.b" Prompts
rtntrp "relntrp.c" Interpolate
rtntrp "rtntrp.b" Interpolate
runkut "runkut.b" Propagate
rvprop "rvprop.b" Propagate
rvshft "arshft,b" Math
rvup "rvup.b" Propagate
rvzero "arshft.b" Math
sclset "sclset.b" Plot
s_arch "search.c" Fman
seo2hms "timedate.c" Time
secnds "secnds.b" Time
sensed vel "qasv.c" Fman
setDate "timemake.c" Time
setHMS "timemake.c" Time
setMaxErr "stat_msg.c" Message
setTime "timemake.c" Time
setin "initlinput.c" Linput
setq "linput.c" Linput
sfilt "sfilt.b" Filter
sfinit "sfinit.b" Filter
sfout "sfout.b" Filter
sftrat "xradar.b" Obs
shaft "xradar.b" Obs
shoxq "dspxq.b" Numdis
sign "sign.o" Math
skip_lines "prt_util.c" Message

ROUTINE CROSS REFERENCE (cont'd)
NAME FILE DIRECTORY
smmul3 "mx3ops.b" Math
smooth "smooth.r" Filter
snoise "snoise.b" Filter
solrad "solrad.b" Force
spfmt "spfmt.b" Qatape
sphdr "sphdr.b" Product
sprtctime "timeprint.c" Time
sprtdate "timeprlnt.c" Time
sprthms "timeprint.c" Time
sprtsec "timeprint.c" Time
star_track "qastar.c" Fman
starz "msgdsp.b" Message
std_time "timedate.c" Time
stinit "xtrack.b" Obs
stm "stm.b" Filter
,stmrv "stmrv.b" Filter
stop "stop.c" Fman
stprop "stprop.b" Filter
strsave "strsave.c" Lists
strstore "strstore.c" Lists
sub "linput.c" Linput
sum "linput.c" Linput
sunpos "sunpos.b" Celestial
sunup "sunpos.b" Celestial
leuperg "superg.b" Propagate
svalue "lists.c" Lists
svelbs "svelbs.b" Force
Isvftch "svftch.b" Force
svmul "mxops.b" Math
svmul3 "mx3ops.b" Math
svntrp "svntrp.b" Interpolate
symbol "lists.c" Lists
!symxv "symxv.b" Math
tangle "tangle.b" Obs
l_aperd "taperd.c" Downfor

ROUTINE CROSS REFERENCE (cont'd)
NAMEFILE
DIRECTORY
,,tblchk.b" Produottblchk
,,tblook.b" ForcetbloOk
,'tpdsP.b" Messagetdsp
tenrnd ,,temrnd. D" Math
test_print ,,qastar. C" Fman
,,filedit.c" Fmantext_in
"tio.b" Promptstio
"tpdsp.b" Messagetpdsp
,'tpdsp.b" Messagetpstrz
,xtrack.b" ObstraCkh
,'xtrack.b" Obstrackv
,'xra_ar.b" Obstrnion
,,xradar.b" Obstrnrat
,,tstep.b" Propagatetstep
,'tpdsp.b" Messagetstrz
,,twobod.b" celestialtwobod
"uax.b" Coordinateuax
udpfmt ,,udpfmt.b" Product
.uinfmt. D" Productuinfmt
,,linput.c" Linputunop
,,uspfmt.D" Productuspfmt
"ust.b" coordinateust
usub ,,linput.C" Linput
,,uvw2m.b" Filteruvw2m
uvwlVh ,,uvw_Vh.b" coordinate
.uvwmat.b" coordinateuvwmat
"mxopS.b" Mathvadd
.vector. C" Mathvadd
.mx3Ops.b" Mathvadd3
.vector. C" Mathvaddto
,,va_dat.b" Downforvaldat
"vector.C" Mathvdist
,,mxops.b" Mathvdot
,'vector.C" Mathvdot
vdot3 ,,mx3ops.b" Math

ROUTINE CROSS REFERENCE (cont'd)
NAMEFILE DIRECTORY
ORIGINAL PAGE ES
OF POOR QUALITY
vfadd
vfaddtO
vfmul
vliSt
vlrest
vnorm
vnorm3
vntfch
vrS$
vrunit
vset
vshft3
vshift
vsub
vsUD
VSUb3
vunit
vunit3
vzerO
I/_=er°vzero3
I wndang
write_fi_e
wrtOut
xlDlnk
(blank
<cmpar
XCOaS
xdsp
:×dsp2
'LxfBdmP
xi2chr
_xnth
xqdatz
xqdsp
"vector.C" Math
,.vector.C" Math
"vector,C" Math
"linput.C" Linput
"vlrest,b" Filter
"mxopS.b" Math
,'mx3ops.b" Math
.vntfch.b" Force
"vector. C" Math
"vectOr • C" Math
"vector. c" Math
,,mx3Ops .b" Math
,,arshft.b" Math
,,m×ops.b" Math
,,vector.C" Math
,,mx3ops.b" Math
"mxops.b" Math
,,mx3opS.b" Math
,,arshft.b" Math
,,vector.C" Math
"mx3opS.D" Math
"wndang.b" Force
"rdwt.c" Fman
-getOut.b" Downfor
,,qxstuf.b" Charutil
"qxstUf.b" Charutil
.xcmpar.b" Numdis
,'xcoaS.b" ODs
"msgdsp.b" Message
"msgdsp.b" Message
,,xf8dmp.b" Dsputil
,,xi2chr.D" Charuti]
,,×nth.b" Charutil
,,xqwtmz.b" Prompts
,,xqdsP.b" Numdis

ROUTINE CROSS REFERENCE (cont'd)
NAME FILE DIRECTORY
xqdspl
xqdsph
xqkmpl
xqkmp2
xqkmpt
xqtime
xqwget
xqwint
xqwtmz
xradar
xtrack
yesno
ymd2j
yyback
yybgin
yycrank
yyerror
yyestate
yyextra
yyfnd
yyin
yyinput
yyleng
yylex
yylineno
yylook
yylsp
yylstate
yymatch
yymorfg
yyolsp
yyout
yyoutput
yyprevious
yysbuf
"dspxq. b"
"dspxq.b"
"xqkmpt. b"
"xqkmpt. b"
"xqkmpt. b"
"xqwtmz. b"
"xqwget. b"
"xqwget. b"
"xqwtmz. b"
"xradar. b"
"xt rack. b"
"yesno. b"
"ymd2 j . b "
lex. C"
lex. c"
le x. C"
i npu t. c"
1ex. C "
Iex C"
lex c"
lex C"
1ex c"
lex c"
Iex c"
lex c"
lex c"
" l ex c"
"lex c"
" I ex c"
" 'ex C"
" 'ex C"
" ' ex C"
" ex C"
" ex C "
" ex. C "
Numdis
Numdis
Numdis
Numdis
Numdis
Prompts
Dsputil
Dsputil
Prompts
Obs
Obs
Prompts
Time
Linput
Linput
Linput
Linput
Linput
Linput
Linput
Linput
Linput
Linput
Linput
Linput
Linput
Linput
Lin)ut
Lin)ut
Lin)ut
Lin)ut
Lin)ut
Lin)ut
Lin)ut
Lin)ut

ROUTINE CROSS REFERENCE (cont'd)
NAME FILE DIRECTORY
yysptr
yysvec
yytchar
yytext
yytop
yyunput
yyvstop
zutek
" I ex. c"
" lex.c:'
" I ex. c"
"1 ex. c"
"lex.c"
"I ex. c"
"I ex. c"
"zutek. b"
Linput
LinDut
Lin3ut
Lin3ut
Lin3ut
Lin3ut
Lin3ut
Force

TRWHoustonSystemServices 1 - (printed i2/18/86)

constm.b(3) (Celestial) constm.b(3)
NAME
constm
SYNOPSIS
subroutine constm (soia,to]d,snew,tnew,part)
double _recision so]_ (6)
aoubie precision toi_
aouPie precision snew (6)
_ouole precision tnew
aou#ie precision part (6,6)
DESCRIPTION
constm
Computes a state transition matrix using mean conic approximatioR.
sold
tolc
sne_
tnew
Dart
o)d state (input)
time of olo state input
new state (input)
time of new state input)
;a-t_al of nev., state w_tn respect tc new state (outDut_
TRW Houston System Services 1 - (printed 12/18/86)

getrnp.b(3) (Celestial) getrnp.b(3)
NAME
ge_np
SYNOPSIS
subroutine getrnp {Oate,aates,caetut,trnp,rnp,hangle)integer date (5)
double precision Cotes
double precision caetut (2)
double preo;sion trnp
double precision rnp (3,3)
double precision bangle
DESCRIPTION
getrnp
Computes rnp matrix at given calendar date.
date
_ates
cdetu_
trnp
rnp
year-month-day-hour-minute of Dose date (input)
seconds of base date (input)
ju! man ephermis to julian universal conversion constants (input)
time af_en base date (in seconds) for rnp matrix (incur)
rotation nutation precision matrix (output)
_qangle hour' angie [output)
TRW Houston System Services - 1 - (printed 12/18/86)

moopos.b(3) (Celestia]) moopos.b(3)
NAME
moopos, moonup
SYNOPSIS
subroutine moopos (t,r)
Ooubie precision t
doubie precision r (3
entry moonup
DESCRIPTION
moo_os
Computes the moon position by interpolation from the ephemeris file created
by moonup.
t current time (input)
r moor, position at current time (output)
moonu_
Creates moon ephemeris Dased om xxmoon parameters.
TRW Houston System Services 1 - (printed 12/18/86)

ORIGINAL PAG_ IS
POOR QUALITY
rotate.b(3) (Celestial) rotate.b(3)
NAME
rotate
SYNOPSIS
subroutine rotate (Dj_,deltat,cqetut,np,rnp,rascm)OOUDle precision b3_
qouble precision aeltat
aoubie precision cOetut (2)
CouPle precision np (3.3)
double orecision rnp (3,3)double precision rasom
DESCRIPTION
rotate
Analytically generates the true hour angle of greenwich, the precession,nutation, precession-nutation, and geographic transformation matrices for
the earth. All matrices are referenced to a base coordinate frame defined
by the mean equator and vernal equ_no× of the earth at the epoch 1950.0.
_eltat
cdetu=
mD
rnp
bjd = base julian date
oe!ta in hours from Dase julian date
ar_'ay of COnStants used in determiningephemeris time ano universal time
nutatior;-precesslo_ matt _>(
rctatlon-nut_tloR-precesslon matrix
tne difference #etween
rascm greenwich mear hour angle
TRW Houston System Services 1 (printed 12/18/86)

sunpos.b(3) (Celestial) sunpos.b(3)
NAME
sunpos, sunup
SYNOPSIS
subroutine sunpos (t,r}
_oubie precision t
ooubiE precision _ (S)
entry sunup
DESCRIPTION
sunpos
Computes the sun position by interpolation from the ephemeris {ile
by sunup.
t current time [input)
r sun pos_tio_ at current time (output)
sunup
Creates SUm ephemeris b_sed on xxsun paramesers.
created
TRW Houston System Services 1 - (printed 12/18/86)

twobod.b(3) (Celestial)
ORIGINAL PA_ '_
OF POOR QUALITY
twobod.b(3)
NAME
twobod
SYNOPSIS
subroutine twobo_ (mu,tau,x,y)
oouole precision mu
douDle precision _a_doubte precision x (6)
aouble precision y (6)
DESCRIPTION
twobod
Propagates a vector using Goodyear's two universal variable scheme.
mu gravitational parameter (input)
tau time step (input)
initial state (input)
final state (output)
TRW Houston System Services 1 (printed 12/18/86)

dollar.b(3) (Charutil) dollar.b(3)
NAME
dollar
SYNOPSIS
suorout_ne dollar ix,ix)
integer i>:
cr, aracter_l × (ix)
DESCRIPTION
dollar
Fills f_nal blank cflaracters of input string wit_ dollar signs. Inpu_ lx
is _nae× of character to start at, returns 1st nonDiank or non dollar signindex in 1×. Note that last characte _ is always a Oollar sign.
1x length of string (input/output)
character string (input/output)
TRW Houston System Services 1 (printed 12/18/86)

ORIGINAL PAG_ _
OF POOR QUALITY
lstfnd.b(3) (Charuti]) lstfnd.b(3)
NAME
lstfnd
SYNOPSIS
subroutine lstfnd (x.list.lx,ilist)
_nteger ilist
_ntege_ lxcharacter-1 x (lx_
chaPacter*l list (lx,i] ist)
D_SCRIPTION
lstfnd
Searches list for entry x. The searc_ begins at the end (entry i11st), andcontinues to the beginning. On return i_ist is thus the last index of the
list with the name x or else O, in which case there were no entries found.
il ist length of list on input, inOex of item on exit(input/output)
ix length of an entry in Dytes (input)
search item (input)
] 1St list to search (input)
TRW Houston System Services 1 - (printed 12/18/86)

nstrng.b(3) (Charuti]) nstrng.b(3)
NAME
nstrno
SYN0PSIS
subroutine nstrng (numDer0string)
integer number
character_7 strin_
DESCRIPTION
nstrngConverts an integer to a character string wi_h the orooer suffix.
number input integer
string output string
COMMENTS
The number is limltec oy 0 < numDer < 32687.
TRW Houston System Services 1 - (printed 12/18/86)

ORIQNAL p_,_ ...._-_'_4 i ¸ °_
OF POOR QUALITY
qxstuf.b(3) (Charutil) qxstuf.b(3)
NAME
qxstuf, xDlank, xlblnk
SYNOPSIS
subroutine qxstuf
integer l
¢haracter_1 p (!)
integer il
_1,p.il)
entry xblank (l,Di
entry xlblnk (!,p,il}
DESCRIPTION
qxstuf
Sets character array to blanks and finds first nonblank in string.
1
P
il
xb I a ni,,
ie_gtn of character strin 9
character s_r_ng to be blanke_
inaex to non blank
Sets clqarscte_ array to DlanKs.
xlblnk
Finos 1st non Dian< _n string.
TRW Houston System Services - 1 (printed 12/18/86)

qxvalu.b(3) (Cnarutil) qxvalu.b(3)
NAME
_xvalu
SYNOPSIS
suoroutine _xvaiu [1,p, il)
integer
character-_ _ (1_
integer ii
DESCRIPTION
axvalu
Conve_ts s_ring tc _mteger.
length o? character string (input)
chanacter string to be deciphemeo (input)
il inaex to non blank (output)
TRW Houston System Services 1 - (printed 12/18/86)

xi2c_r.b(3) Charutil)
oRIGINAL PAGE IS
OF POOR QUALITY
xi2chr.b(3)
NAME
xi2chr
SYNOPSISsubroutine xi2chr (1.p)
integer l
character-!2 p
DESCRIPTION
xi2chr
Converts integer to Character
length of character string [output)
character string to be blanked (input)
TRW Houston System Services - 1 - (printed 12/18/86)

xnth.b(3) (ChaPuti]) xnth.b(3)
NAME
xnt_
SYNOPSIS
subroutine xnth (_,ntm)
_nteger ic_aracte_2 nth
DESCRIPTION
xnth
Obtains 2 oharacter ordinal strin# from an integeP.
integer (_nout)
nth oPdinal stPimg (output)
TRW Houston System Services 1 - (printed 12/18/86)

oRIGINAL PAGE ISOF PoOR QUALITY
aijkq.b(3) (Coordinate) aijkq.b(3)
NAME
aijkq, a121q, a123q, a131q,a313q, a321q, a323q
a132q, a212q. a213q, a231q, a232q, a312q,
SYNOPSIS
subroutine aijkq (alpha,q)
_oubte precision alpha (3)
double #recision q (4_
entry a121q (alpha,q)
entry a123q (alpha,q)
entry a131q (alpha,q)
entry a132q (alpha,q)
entry a212q (alpha,q)
entry a213q (alpha,q)
entry a231q (alpha,q_
entry &232q (alpha.q)
entry a312q (alpha,q)
entry a313o (alpha,q}
entry a321q (alpha,q}
entry aS23q (alpha,Q}
DESCRIPTION
aijkq
Converts eu_er' ang)es To quaterniom elememts.
aipha eu]er angles in sequence.l:rol],2=pi_ch.3=yaw (input)
q quaternion elements generated from the eu)er sequence (output)
a121q
Performs a roll-pitch-roll to quaternion operation..
a123q
Performs a roll-pitch-yaw to quaternion operation,
a131q
Performs a roll-yaw-roll to quaternion operation.
a132q
Performs a roll-yaw-pitch to quaternion operation.
a212q
Performs a pitch-roll-pitch to quaternion operation.
a213q
Performs a pitch-roll-yaw to quaternion operation.
TRW Houston System Services 1 - (printed 12/18/86)

aijkq.b(3) (Coordinate) aijkq.b(3)
a231qPerformsa pitch-yaw-roll to Quaterniomoperation.
a232qPerformsa pitch-yaw-pitch to quaternion operation.
a312qPerformsa yaw-roll-D_tch to quaternion operation.
a313qPerformsa yaw-roll-yaw tel quaternion operation.
a321q
Performs a yaw-pitch-roll to quaternion operation.
a323q
Performs a yaw-pi_cm-yaw to quasermioR operation.
TRW Houston System Senvices 2 - (printed 12/18/86)

c2shl.b(3) (Coordinate)
ORIGINAL PAGE IS
OF POOR QUALITY
c2shl.b(3)
NAME
c2shl
SYNOPSIS
subroutine c2shl (×,y,s]double precision x (6)
double brecision y _6)double precision s 16)
DESCRIPTION
c2shl
Obtains modified shell coordinates frop. _wo Cartesian vectors.
reference vehicle state (input
target vehic]e state (input)
modifie_ stnell coordinates
(output)r, artier of x,y,z.xoot,yaot,zaot
TRW Houston System Services 1 - (printed 12/18/86)

cart.b(3) (Coordinate) cart.b(3)
NAME
cart
SYNOPSIS
subroutine cart (mu,c,x)
double precisior_ muaouble precision c [6)
aouble Drec_mion x (E)
DESCRIPTION
cart
Converts clas_cal elements to cartesian elements.
mu gravitational parameter (input)
c classical elements in following order
1 semimaoor axis or semilatus rectum (if parabolic)
2 eccentricity3 incl inetlom
4 ascending noae5 arguement of perigee
6 true anomaly [input)
× car_esiam bositlop and veioc]ty (output)
COMMENTS
if ecce;qtr_oity is one, the orm_t is assumec to me #araoolic ano the first
eiement _s treateo as the semilatus rectun: rat_er tna_ the semlmajor a×!s.
TRW Houston System Services 1 (printed 12/18/86)

clas.b(3) (Coordinate)
ORDINAL PAGE ISOF POOR QUALITY
clas.b(3)
NAMEclas
SYNOPSIS
subroutine clas (mu,x,c)
double preoisio_ mu
double precision c (6)
double precision x (6)
DESCRIPTION
clas
Converts cartesian elements into classical elements.
mu gravitational parameter (input)
classical elements in order:
1. semimajor axis Or semilatus rectum
2. eccentricity3. inclination
4. ascen_indlng node5. arguement of perigee
6. true anomaly (output)
car-cesiar_ state ( input':
TRW Houston System Services 1 (printed 12/18/86)

euler.b(3) (Coordinate) euler.b(3)
NAME
euler
SYNOPSIS
subroutine euler {Kop,n.atpha,q,rmat)
integer KoD
integer r
_ouble pmecision _ipn& (3)
double precision q (4)
double precision rmat (3,3)
DESCRIPTION
euler
Expresses e rotation as a sequence of euler angles, a set of quaternion
elements, and a set of transformation matrix elements. Given one of these,
euler generates tIRe other two. It must De told the input type and the
requ_re¢ euler angle sequence.
kop the input type ...
= euler angles
2 = quaternion
3 = transformatlon matrlx
tne eu]er seouence (three a_its), where ...
1 = _o!i
2 : p_tCr_
3 = ya_
e._. 132 =rol], yaw Dltcr,
alph_
rm_=
the euler angles which oescri_e the rotatlor,, they may be either
the input or an output.
the quaternion which aescribes the rotation.it may be either the
inDut or am output
the transfor.m&t_or matr._× which aescriDes tne rotation, it may be
eit_e _ the input or ar_ outDut.
TRW Houston System Services 1 - (printed 12/18/86)

ORIGINAL PAGE IS
OF POOR QUALITY
frame3d.c(3) (Coordinate) frame3d.c(3)
NAME
Frame3 - forms orthogana! frame from 3 Oimensiona] vectors x,y,z.
SYNOPSIS
lnt Frame3(frame.×.y)
double _frame,_x,_y;
DESCRIPTION
Frame3
forms orthogana] frame from 3 dimensional vectors x,y,z. The X axis !s
along x, the Z axis along x cross y and the Y completes the triad. A ! is
returnea if x anOy are not perpendicular and the frame is trivialized.
Else a 0 is returned. The axes vectors are stored in orOer X,Y.Z.Interpreted as a matrix stored by rows, the frame ts thus the
transformation that takes coordinates in the frame definimo t_e vectors xand y to the coorainates in the frame they de_ine.
TRW Houston System Services 1 (printed 12/18/86)

lax.b(3) (Coordinate) lax.b(3)
NAME
lax
SYNOPSIS
subroutine lax (s,m,omega)
double precision s (6)
double precisiom m (3,3)
aoubie precision omega (3)
DESCRIPTION
lax
Computes LVLH axes _ive_ e geocentric cartesian state as
s input state vector in geocentric cartesian coordinates
m rotation matrix. This rotates inertial to LVLH (output)
fowl : unit (V x R) × Z
row2 = Z x X
row3 = - unit (R)
omega velocity correction vector (Ve_ x Pos/(r x r))(output)
TRW Houston System Services 1 (printed 12/18/86)

]st.b(3) (Coordinate)
ORIGINAL PAGE I$
OF POOR QUALITY
]st.b(3)
SYNOPSIS
subroutine 1st (xi,xo,lm,omega}
aouble precision xi (6)
_ouble precision xo (6)
double precision ]m (3,3)
double precision omega (3)
DESCRIPTION
1st
Computes tvlh state giver inertial state anc inertial to lvlh matrix.
xi input inertial state
xo output tvlb state where
PosO = In • Posi
veto = i#,- (Yell • Posi × omega)
lm transformation matrix from inerti_l tc lvlh coordinates
omega veiocit_ correc_io_ vector (input)
TRW Houston System Services 1 - (printed 12/18/86)

qijka.b(3) (Coordinate) qijka.b(3)
NAME
qijka, a121a, q123a, q131a,
q313a, q321a, q323aa132a, g212a. q213a, q231a, q232a, q312a,
SYNOPSIS
subroutine qijka (q,aip_a)
double precision q (4)
double precision atpne (3]
entry q121a (q,alp_a)
entry q123a (q,alpha)
entry q131a (q,alpha)
entry q132a (q,alpha)
entry q212a (q,alDha)
entry q213& (q,alpha)
entry a231a (q,alona)
entry G232a (q.a)pna_
entry a312a [q,alpha_
entry a313a (q.aiphz _
entry q321a (q,a]pna)
entry O323a (q,a]pha)
DESCRIPTION
qi3ka
Converts quarern_or eieae_=s in_c euler ang]e e]ements.
q quaternion (lnbu_)
alplqa euler angies loutput) 1=ro]] ,2=p_tcn,3=yaw generatea
quaternion
q121a
Performs a ro]l-pitch-rol] operation.
from the
q123a
Performs a roll-pitch-yaw operation.
q131a
Performs a roll-ya_-rclq ooeration.
q132a
Performs a roll-yaw-pitch operation.
q212a
Performs a pitch-roll-pitch Operation.
q213a
Performs a pitch-roll-yaw operation.
TRW Houston System Services 1 - (printed 12/18/86)

ORIGINAL PAGE I_
OF POOR QUALITY
qijka.b(3) (Coordinate) qijka.m(3)
Q231a
Performs a pitch-yaw-roll operation.
q232a
Performs a pitch-yaw-pitch operation.
q312a
Performs a yaw-rol]-pitch oDeratiotq.
q313a
Performs a yaw-roll-yaw opera_ion.
q321a
Performs a yaw-pitch-roll operation.
q323a
Performs a yaw-pitch-yaw operation.
TRW Houston SystemServices - 2 - (printed 12/18/86)

rst.b(3) (Coordinate) rst.b(3)
NAMErst
SYNOPSISsubroutinerst (xl,x2,xb)doubleprecision xl (6)doubleprecision x2 (6Jooubleprecislomxb (24)
DESCRIPTIONrst
ComputesPelative sta_e_.xl state one (input)x2 state two (inbut.)
Outputbuffer is xl, xl-x2, x20x2-xl.
xb state buffer (output)
TRWHoustonSystemServices 1 - (printed 12/18/86)

uax.b(3) (Coordinate)
ORIGINAL PAGE IS
OF POOR QUALITY
uax.b(3)
NAME
uax
SYNOPSIS
subroutine uax (s,m)
double precision s (6)
double precision m (3,3)
DESCRIPTION
uax
Computes u,v,w axes, g_ven.a geocestric cartesian state.
s input state vector in geocentric cartesian coordinates
m rotation matrix. This rotates cartesis to UVW (output)rowl = unit (Pos)row2 = _ x U
row3 = uffit (Pos x Vel)
TRW Houston System Services 1 - (printed 12/18/86)
ust.b(3) (Coordinate) ust.b(3)
NAME
us_
SYNOPSIS
suDroutine ust (xi,xo,um)
OouP]e precision xi (6)
oou_te precision xo (6)
Ooub)e precision um (3,3)
DESCRIPTION
ust
Computes uvw state given relative
matrix,
xi inertial state (input)
xo uvw state (output)
um
inertial
transformation matrix from inertia]
state aria inertial to uvw
to uvw coordinates (input)
TRW Houston System Services 1 (printed 12/18/86)

OR!G!I',IALP:'_ IC
OF POOR QUALITY
uvw.c(3) (Coordinate) uvw.c(3)
NAME
UVW Cart - UVW coordinates
SYNOPSIS
oouble *UVW Cart(UVW.Xtrgt.Xbase )
double ,=UVW,*XtPgt,w:XPase;
DESCRIPTION
UVW Cart
R_turns pointer to UVW position and velocity cf target with respect to a
base state (position, velocity), tf UVW is null. a iocal Puffer is used
for the coordinates, otherwise the space indicated by UVW is used.
TRW Houston System Services 1 (printed 12/18/86)

uvwlvh.b(3) (Coordinate) uvwlvh.b(3)
NAME
uvwlvh
SYNDPSIS
subroutine uvwlvh (xu,w,xl)
double precision xu (6)
doubie pmecisior, w
double precision xl (6)
DESCRIPTIONuvwlvh
Computes lvlh coordinates from uv_ lNfo
xu uvw COOrdinates (input)
w angular rate of local vertical frame (input)
xl lvlh state (outDut)
TRW Houston System Services 1 - (printed 12/18/86)

ORIGINAL PAGE |S
OF POOR QUALITY
uvwmat.b(3) (Coordinate) uvwmat.b(3)
NAME
uvwmat
SYNOPSIS
suDroutine uvwmat (x,m,r,w)
OouDle precision x (6)
oouble precision m (3,3)
Oouble precision rOoumle precision w
DESCRIPTION
uvwmat
Computes uvw to inertial matrix.
x inertial state (input)
m uvw to inertial metmix (output)
coll: unit(Pos)
col2 = toll x co13
Co13 = unlt(Pos x V)
r radius of vehicle(input)
w an#ular rate of local vertical
(output)
_r_me norm( Pos x Vel )/(r • r")
TRW Houston System Services 1 (printed 12/18/86)

efdata.b(3) (Downfor) _fdata.b(3)
NAME
dfdata
SYNOPSIS
block aat_ dfaata
DESCRIPTION
_faa_a
Intializes common blocks.
TRW Houston System Services - 1 - (printed 12/18/86)

dfnput.b(3) (Downfor) dfnput.b(3)
NAME
dfnDut
SYNOPSIS
subroutine dfnput (status
integer status
DESCRIPTION
dfnput
processes the inputs
status the input process ng error flag
TRW Houston System Services 1 (printed 12/18/86)

dwnfmt.b(3) (Downfor) dwnfmt.b(3)
NAME
dwnfm_
SYNOPSIS
program awnfmt
DESCRIPTION
dwnfmt
Drives the eownlist processing.
awnfmt < Input file > Output_fiie
Fi]es BUGS and OUTPUT are also created at execution level
and aa_itional summary print.to contain debug
TRW Houston System Services - I (printed 12/18/86)

eb2asc.c(3) (Downfor) eb2asc.c(3)
NAMEeb2asc,getbits - routine to convert ebcdic to ascii
SYNOPSIS
eB2asc(strngl,strng2,m)
int _strngl;
int *strng2;int _m;
getbits(w,s,n)
int n;int s;
unsigned w;
DESCQIPTION
em2asc
routine to convert eDcdic to ascii
strngl string of characters to be convert
strng2 str_ng of characters (output}
m number of characters tc De convert
inDU_
_npu_
getbits
return {right adjusted) the n-bit f_eld of w tnat begins at position s
n numoer of bits (inout )
s begin postlon (input)
w ,workiog_f_er _O_tlOUt}
TRW Houston System Services 1 - (printed 12/18/86)

genout, b(3 ) (Downfor) genout, b(3)
NAME
genou'E
SYNOPSIS
subroutine genout (file)
integer file
DESCRIPTION
genout
Builds the nominal file frames and recor¢ buffers and directs the output
file construction.
file the output file aesiglq£tion used for looping
COMMENTS
1.
5.
All data frames to all output files depend on the organization of the
data ids.
The data is expected to De containeo on the CCT _ eitner 36 Pit or 72
b_t woPd lengths.
0nly data for which the CC T actress table has non-zero emtries will be
processed.
TRW Houston System Services 1 (printed 12/18/86)

get,at.b(3) (Downfor get,at.b(3)
NAME
getdat
SYNOPSIS
subroutine getaat (recfnd)integer recfnd
DESCRIPTION
getaat
Obtains parameters for orbiter CCT aown]ist tape and cal]s a subroutinereformat into the internal files.
to
recfnd flag indicationg Oata scan records found(ouzput)
COMMENTS
1. The subroutine gethdr will have already found the first fedora of the
first aata scan so that the cot is currently positioDed at thebeginning of the second record.
5. The begin scan will be _etermined b_ the input timbeg whic_ will be
comparea to the time-tag v_lues founQ in e_c_ scan ]n or_er to flnQ
the scan from which _ata processing may begin.
The end scaT_ will be determined Dy the in.Lit t_menc whic_ wil! be
comDaPeQ to the t_me-tag values founo Jr, each sca_ 1_ order to fine
the scar lr: wniClq _&_ processing will end.
TRW Houston System Services 1 (printed 12/18/86)

gethdr.b(31 (Downfor) gethdr.b(3)
NAME
gethdr
SYNOPSIS
subroutine gethdr
integer recfnQ
(recfnd)
DESCRIPTION
getndr
Reads the headers off of t_e _ownl ist CCT
msid's to De processed.
recfnd the recor_ status flag
to obtain information on the
TRW Houston System Services 1 - (printed i2/18/86)

getout.b(3) (Downfor)
ORIGINAL PAGE ISOF POOR QUALITY'
getout.b(3)
NAME
getout, opnout, nitout, bldout, delout, wrtout, clsout
SYNOPSIS
subroutine getout (datld,file,fnam,frmid.frmsta.hdrid,
recsta,unitid,wrdfrm)
OouDle orecision dtim
integer datid
integer file
character fnam
character*4 frmid
integer frmsta
character hdrid
integer recsta
integer unitid
integer wrdfrm
entry opnout (file.fnam,n_rid.wrdfrm,recsta!
entry nitout (frmid,file)
entry bldout (_atio,fite,frmsta)
entry de]out (¢atid.file)
entry wrtout [fi;e,recst&)
entry c!sodt (f4]e,r'ecsta)
DESCR!PTION
getout
Builds frames, deletes frames, :col leers
records to file.
¢_im da_ scan time
_atio loop counter on tne data i_ relative current fi]e
flie the output file aesignatiom
fnam the character file name of the output file
frmid dummy variable
frmsta the frame status flag
hdrid the character type of output file
recsta the record status flag
unitid the unit number associated witl_ ct_rrant file
wrdfrm the number of words per frame-excluding the 4 heaaer words
opnout
Opens all output files amd writes header recoras. Stores copypacket for each output file.
nitout
Initializes frame buffer.
frames into recor, d_ and wriCes
of i/o
bldout
TRW Houston System Services 1 (printed 12/18/86)

getout.b(3) (Downfor) getout.b(3)
Builas frame buffer.
aelout
Deletes current frame losates next vallo entry ir _a_e seauence.
wr%out
Writes frame to recora.
clsout
Closes output files.
COMMENTS
1.
3.
All data frames to all output files aeDend on the organization of thedata ids.
The aata is expecte_ to De containeC om the OCT in either 36 bit or 72
pit wore lengths.
Only data for which the CCT actress table has nor_-zero entries will be
Dr'ocessed.
TRW Houston System Services 2 - (printed 12/18/86)

ibmcvt.c(3) (Downfor) ibmcvt.c(3)
NAMEiomcvt, fetonbits - routine to convert IBMDPdata to HPDPOata
SYNOPSIS
ibmcvt(buf,n,type)int _Puf;
int _n;
int *type;
fetchbits(x,p,k)
unsigned x:
int p;int k;
DESCQ]PTION
iDmcvt
C routine to convert IBM DP aata to HP DF _at_
Duf array containing numoer to convert
n no. entries it, array
type type of conversiot3 0 - sp ; i - as,
fe_cRcirs
function to get K-Pits from word(r_g_t a53ustifled)
x working location(output)
p begin position (input)
k nu_er'o{ Pits finout)
ORIGINAL PAGE ISOF POOR QUALITY
TRW Houston System Services 1 (printed 12/18/86)

match.b(3) (Downfor) match.b(3)
NAMEmatch
SYNOPSIS
subroutine match (msfnd}
integer msfnd
DESCRIPTION
match
Matches msid's from the current header record to the namel_st _nputs
associated with desired output file. For each matcheO msid fill _ a table
indexed by internal ordering to provide the numoer of data samples, address
relative the data scan of _he first sample in the sca;q.
msfnd current count of matched m/sid's
TRW Houston System Services 1 (printed 12/18/86)

oPtfil,P(3) (Downfor) obtfil.P(3)
NAME
oDtfil, clsfi]
SYNOPSIS
subroutine obtfil
ORIG_AL P;.GE IS
OF POOR QUALITY
entry clsfi!
DESCRIPTION
obtfil
Drives the process whioh will accumulate the aata
write them to files.for OU_.DUt frames and
clsfil
Closes all files.
COMMENTS
1.
5.
All da_a frames to all output giles _epend or the or_anizatio_ of tme_ata i_s.
Tme _ata is ex_ecte_ to be containe_ or the CC] lr either 36 bit or 72
bit word lengths.
O_l,/ _$a for, wnicr the CST.aOo;-esY table ha_ non-zero, entries w;:_ Deorocesse_.
TRW Houston System Services - 1 - (printed 12/18/86)

taperd.c(3) (Downfor) taperd.c(3)
NAMEtaperd - buffer input routine for tape
SYNOPSIS
taDerd(buf,n,unit)int *buf;int *n;
int *unit;
DESCRIPTION
taperO
reaO tape info routine
bur buffer(output)
n number of worOs(input)
unit tape drive unit(input}
TRW Houston System Services 1 - (printed 12/18/86)

ORIGINAL PAGE IS
OF POOR QUALITY
valdat.b(3) (Downfor) valdat.b(3)
NAME
valdat
SYNOPSZS
subroutine valaat (relcyc,pointr)
integer bointr
integer reicyc
DESCRIPTION
valdat
Finds data associated with various msid's at addresses specified in the
table constructed _n match. Converts data to internal units and constructstable.
pointr the pointer to the current scan in nbuf
relcyc tne relative cycle number currently being Drocessec
COMMENTS1.
2.
AlX data frames to el] output files dePena on the organ_zat_o_ of thed_a i_s.
The asts is expected to be cont_nec on tne CCT _n e_ther 3E bit oP ?2
bit word iengtns.
Oniv data for w_]c_ the Q_T adopess _able _as nor_-zer, o_em_P_eT _,i_; De
p_ccesse¢.
TRW Houston System-Services 1 - (printed 12/18/86)

ndnead.b(3) (Dsputi]) ndhead.b(3)
NAMEndheaO
SYNOPSISsubroutinenOhead(u,ir,t,x,e)inSegeruinteger lrdoubleprecision tcnaracter-4xinteger e
DESCRIPTIONmdhead
Promptsinput of format page ]ayOut.
u
ir
t
X
e
display unit
current recora (output)
time tag (input/outputS,
frame ia (output)
edit fla 9 (output)
TRW Houston System Services (printed 12/18/86)

ORIGINAL PAGE IS
OF POOR QUALITY
ndnflz.b(3) (Dsputil) ndnflz.b(3)
NAME
ndnflz, ndfnpt, ndfnit
SYNOPSIS
subroutine ndnflz (nf,stat,tbegin,tend,t,dt)integer nf
integer stat
double precision tbegindouble precision tend
double precision tdouble precision dt
entry ndfnpt (nf,stat)
entry ndfnit (nf,tbegin,tend,dt,t,stat)
tena
t
dt
ndfnpt
DESCRIPTION
n_nf]z
Sets up input files for numeric display.
nf number of files needed (input)
star status flag - set negative if error encountered (output)
toegin begin time (input)
enQ time (input)
time tag (input)
time step (input)
Sets uo inout files for numeric disolay.
ndfnit
Initltial lzes input files to begin time amd _pts b_se _i!e options.
COMMENTS
File 3 is assumed to be an attitude file.
TRW Houston System Services 1 - (printed 12/18/86)

ndpage.b(3) (Dsputi]) ndpage.b(3)
NAMEndpage
SYNOPSISsubroutinenOpage
DESCRIPTIONnQpage
Checksif newpageis needed,if so then newpagenumberwritten.
TRWHoustonSystemServices 1 - (printed 12/18/86)

ORIGINAL P.&.GE [8
OF POOR QUALITY
nxtnd.b(3) (Dsputil) nxtnd.b(3)
NAME
nxtn¢
SYNOPSIS
subroutine nxtnd (t,dt,nstep,tend,done]
double p_eoision t
oouble precision dt
integer nstepdouD]e precision tend
integer done
t
at
nstep
tend
Oone
COMMENTS
DESCRIPTION
nxtnd
Sets next output time either _ro_ a base file (bfopt non-zero}, or Pyspecified time step dt (bfopt:O), done _s set to ! it pest eno time tend,
else set to O. if nstep > O, then edit status is not checked. If bfopt >O, then base file is position to next unediteO poimt.
next time (input/output)
step size (input)
step for running off base file (input}
stop time (input)
Cone _1_ 9 (outout}
Base file data must be less than 100 _,oras.
TRW Houston System;Services - 1 - (printed 12/18/86)

xfBdmp.b(3) (Dsputil) xf8dmp.b(3)
NAME
xf8dmp
SYNOPSIS
subroutine xfSdmp (pfmt,u,iop,ir)
integer pfmt
integer u
integer ioD (40)
integer Jr
DESCRIPTION
xfBdmp
ProviOes octa] Oump of standard fi]e format recor¢
format.
in
pfmt format f]ag: - means 130 col, else 80 (input)
displa2 unit (input)
_op i/o packet [input/output)
ir current record (input)
BO or 130 column
TRW Houston System Services (printed 12/18/86)

ORIGINAL Pt"_GE IS
OF POOR QUALITY
xqwget.b(3) (Dsputil) xqwget.b(3)
NAME
xQwget, xqwint
SYNOPSIS
subroutine xQwget (t,xl,x2,Q,w,s)
OouDie precision t
aouble precision xl (6)double precision x2 (6)
double precision q _4)
oouble precision w (3)
integer s
entry xqwint
t
xl
x2
W
s
xqwi r_t
DESCRIPTION
xqwgetObtains trajectory and attitude information from files._nttiaiize time buffer ana snouia be ¢alieO upon emtry.
oesired time (input)
first state (output)
2no state (output)
attitude quaternion (output)
ancular velocity (output)
status word: set to -I if error encountered (output]
Initial izes time buffer.
Entry xqwin't
TRW Houston System Services I - (printed 12/18/86)

fiche.c(3) (Fich) fiche.c(3)
NAMEmain- generatea tape whichcan be read by the fich reader
SYNOPSIS
void main(argc,argv)
int argo;char ,argv[];
DESCRIPTION
main
generate a tape which can be read Py the rich reader-. The format of the
tape is 9-track, 1600 bpi, ASCII, 132 character fixed length records. Theprogram fiche can generate a multi-reel file. However, the fiche processor
will treat each tape as an individual file. It reauires three user inputs
which are put on the command line.
usage : fiche file run_i_ tape_Orive wherefile - name of print file to put on the tape
tumid - Univac type runid 660???taoe drive - C, or 1
TRW Houston System Services 1 - (printed 12/18/86)

OF POOR QUALITY
center.b(3) (Files) center.b(3)
NAME
center
SYNOPSZS
subroutine center (iop,tget,t,x,n,nrec,status)
integer ioD (_}
_ou_le precision tget
CouPle precision t (2)
double precision x (n,2)
integer n
integer nrec
integer status
DESCRIPTION
center
Returns Qata bracketing a given time.
lop
tget
t
x
n
_rec
i/e packel (insu:/output).
given time (input).
bracketing times (input/output),
_a%a associated _ith t (input/output).
numbe _ pC.do.Die pPeo}s3o!q data word_ per frame (1;qbu_).
record number (input/output).
status i/e statu_ f)ag (output).
TRW Houston System Services - 1 - (printed 12/18/86)

get.b(3) (Files) get.b(3)
NAME
get
SYNOPSIS
subroutine get (iop,fintrp,tget,t,x,status)integer, iOD (_)
oouoie precision tgetdouble precision t (2)
double precisioR x (*)
integer status
DESCRIPTION
getInteruolates data to desired time using routine fintrp.routine must be of the form:
f intrp( t 1 ,xl, t2,x2, t,x)wne rt.e
t! = first time
xl = data associated with tl
t2 = second time
x2 : aata associated wltm *_'
t : uesirec time
x : interpolated data at t (outDu_l
lor_ i/e packet ( input/output)�
t_oet time tag of oeslrec pos..vel, t input..
t oracketing time tags used (output).
x data interpolated to desirea time (output).
status i/o status (output).
The interpolation
TRW Houston System Services - 1 - (printed 12/18/86)

thread.b(3) (Files)
ORIGINAL PAGE IS
OF POOR QUALITY
obread.b(3)
NAME
obread
SYNOPSIS
subroutine obrea_ (iop.nrec,t,id,ed,obias,obs,res,status)
integer iop (_)
integer nrec
double precision t
character id
integer ed
double precision obias
double pPecision oDs
_ouble pPecision Pes
integer Status
DESCRIPTION
oDread
_ELBET rea_ interface to GFF routines.
ioD
nrec
ld
ed
obias
Pes
s_a_us
i/o packet (input/output)
desired record number (input)
time tag (output)
frame io (output)
edit status (cutout)
observation bias (output)
observation _output)
resiaual (cutout)
i/0 statu_ (output)
TRW Houston System Services 1 - (printed 12/18/86)
obwrit.b(3) (Files) obwrit.b(3)
NAMEobwrit
SYNOPSISsubroutineobwrit (iop,nrec,t,id,ed,obias.obs,res.status)integer io_ (_1_n_egernrecdoubleprecision tcharacter idinteger e_doubleprecision obiasdoubleprecision obs
Ooubie precisio_ res
integer status
DESCRIPTION
obwriT
RELBE7 wr_e interface To GFF routines.
iop
nrec
t
id
ec
obias
ODS
res
status
i/o becket (input/ou_pu=}
desired record number (_nput)
Time tag (inDut)
frame id (inDuti
edit status (inDu_'
observation bias (inDut)
observatlon (input
resiOual (_nput)
i/o status [cutout
TRW Houston System Services (printed 12/18/86)

rlcls.b(3 (Files) rlols.b(3)
NAME
rlcls
SYNOPSIS
subroutine mlcls (lop,status)integer iop (*)
integer status
DESCRIPTION
rlcls
Closes GFF file of st_n_ar_ RELBET type.
iop i/o packet (input/output).
status i/o status (output)
TRW Houston System Services - 1 - (printed 12/18/86)

rlcntr.b(3) (Files) rlcntr.b(3)
NAME
rlcntr
SYNOPSIS
subroutine rlcntr (iop,tm,n,rec,t,e.stat)
integer ioD (-)
double precision tm
integer n
integer rec (n)
oouble precision t (n)
douole precision e (_)
integer stat
ORIGINAL PAGE IS
OF POOR QUALITY
DESCRIPTION
rlcntr
Centers array of unedite_ points from RELBES GFF about a desired time tm.
The t_mes anO recoras of the points are returne_. Warning messages areissuec _f the amray cannot be centered because an ena of file _s
encountered. Error Messages are issue¢ if not enough points are found. Theroutine assumes that tne times have been initi_llzed on the first call so
that the last time _n the array is less than tne first time, or was
lniti_iize: by first calling rlmidl.
iom i/c packao_ for file (input)
_pd _esireo time (inout_
numbe_ of frames im output arr_y(input_
rec recoros corresoonding to entries in e (input/output)
array of time tags for entries [input/output)
array Duffer for entries (input/output)
sTa_ status fla9: >=0 is oood, -1 is eof. e is error Ioutput)
TRW Houston System Services - 1 - (printed 12/18/86)

rldsp.b(3) (Files) rlasp.b(3)
NAMErldsp, rtpdsp, rlhdsp
SYNOPSISsubroutine rlasp (p,u)integer p (45)integer uentry rlpdsp (p,u)
entry rlhdsp (p,u)
DESCRIPTIONrldsp
Displays input/output packet to specified unit.i/o packet (input)
display unit numoer(input)
rlpdspDisplays i/o packet info suchas unit, type, name,size anOtime span.
rlh_SpD_sDlaysi/o _cket informat_ol_suchas unit.span,_;ze. creatiom andupCateaates.
_yDe. _ame, iheaaer, time
TRWHoustonSystemSePvices - 1 - (printed 12/18/86)

rle_it.b(3) Files) rledit.b(3)
NAME
rledit, r!fwds, rlbwas
SYNOPSIS
subroutine rledit (iop,rec,t,fia e,etat)
integer _op (_)
integer rec
aouDle preclsiotq t
character lid
double precision e (-)
integer star
entry rlfwds (iop,rec,t,fid,e,stat)
entry rlbwds (iop,rec,t,fid,e,stat)
DESCRIPTION
riedit
Entr_es to obtain next unediteo frame.
file _!
lop
rec
f_d
e
s_aT
rlfwds
Note that status: -I
e_it value for OKay < -10 for. error
for end of
i/c package for file (input)
records corresponding to entries in e (input/output}
a_ra_ o_ time ta_s for entries (inDu_/outmut)
frame iQ (Input/output)
arra}, buffer for entries (input/output)
szatus flag: >=0 _s gooo, -1 is eof, e _s e_ror (output]
Reaos forwarc to. the next frame or the eric o_ file.
Plbwas
Reads backward to tt_e nex_ frame or the beginin_,
ORIG_i_,k:_.,,'.',-'_,-,..,.._S
OF POOR QUALITY
TRW Houston System Services - 1 - (printed 12/18/86)

rlfil
OR:C_AL PR,_E 18
OF POOR QUALITY
.b(3) (Files) rlfill.b(3)
NAME
rlfill, rl2end, rlbaok, rl2beg, rlfrnt
SYNOPSIS
suDpoutine rlfill (iop,n. iep,fnd,rec,t.e,stat)
double precision e (_)
integer fnointeger, iep
integer iop (*)
integer n
integer Pet (n)
integer star
double precision t (n)
entry rl2end (iop,n, iep,fnd,rec,t,e,stat)
entry rlPack (iop,n,fnd,rec,t,e,stat)
entry rl2Peg (iop,n, iep,fnd,rec,t.e,stat)
entry rlfrnt (iop,n,fnO,rec,t,e,stat)
DESCRIPTIONrlfi:]
Entry points for filling up frame arrays o • unedited points: rlbacP and
rl2eno attempt tc fi]l entries ir_ array after sDecified inoex. I{
unsuccessful rlfrnt ano mlDack error exit. ]f unsuccessfu_ r!2enc and
r12oe_ move t_e array all the way tc the end or front respect]vel_' ano
reset the index iep to the new start or end index note that the numPer of
length of eac_ entry in the;array must De the same as the frame tengtt_ or.
am error will occur. Index use and start is as follows: Input rl2ena:
iep=start of _ata, filling starts at _ep+fnd+l rl2Deg: iep:,current 1stindex, filling starts:at iep-I output rl2end iep=current 1st inOex, filled
from iep to n rl2beg iep=current last index, filled from I to iep PlfPntfi!_ed from n to R-fnd r_DaCk fil led fro_ 1 to fnd
s
fnd
iep
iop
n
rec
stat
t
rl2end
array Duffer for entries (input/output)
number of points founo (input/output)
pointer to end of e (input)
i/o package for file (input)
number of entries to be found (input)
recoras corresponding to entries in e (input/output)
-status flag: >:O is good, -1 is eof, e is error (output)
array of time tags for entries (input/output)
Attempts to ',:ill entries in array from iep to n.
rlback
Attempts to fill entries in array at fnd+l.
rl2Peg
Attempt_ to fill entries in array from 1 to iep.
TRW Houston System Services - 1 - (printed 12/18/86)

rlfill.b(3) (Files) rlfill.b(3)
rlfrnt
Attempts to fill entr_es in array from n to n-fnd
TRW Houston System Services 2 - (printed 12/18/86)

rlmidl.b(3) (Files)
OF poOFl t%!_:JJT¥
rlmidl.b(3)
NAME
rlmial
SYNOPSIS
subroutlne rlmldl (iop,tm,n,fnd,rec,t,e,stat)
integer lop (_)
OOuuie precision t_
integer n
integer fnd
integer rec (n)
double precision t (n)
double precision e (*)
_nteger stat
DESCRIPTION
rlmldl
Centers an array, of frames about a desired time from scratch.
lop i/c package for file (input)
_m aesire_ time (input)
number of entries to be founa(inou1)
fn_ number of points found[input/output)
r.e_: recorCs Cor,_es,'oonditqo tc_' er]tries i;_ e( input/outDu_ :
array Of time tags for entries(inPut/output)
array buffer _or entries (input/output)
star status flag: >:O is good, -1 is eof, e is error(output)
TRW Houston System Services 1 (printed 12/18/86)

rlnew.b(3 (Files) rlnew.b(3)
NAME
rlnew
SYNOPSIS
subroutine rlnew (iop,name,type,unt,naata,status)
integer iop (_)character name
character typeinteger unt
integer ndata
integer status
DESCRIPTION
rlnew
Opens a new GFF file in accordance with the standard RELBET usage.
lOP
name
type
unt
ndata
i.,o packet (outcut).
file name (input).
file type (input).
unit number (input).
numPer of douDle precision data items in frame (input /.
status i/c status (outsut).
TRW Houston System Services 1 (printed 12/18/86)

rlopen._(3) (Files)
K_ _t ._. _t_l :_,_
OF POOR QUALITY
rlopen.b(3)
NAME
r I open
SYNOmSIS
subroutine riopen (iop,name,unt,uze,status)
integer lop i-:)character name
integer unt
integer uze
integer status
DESCRIPTION
rlopenOpens a old GFF ?ile in accoraance wltlq the standard RELBET usage.
iop i/o packet (output
name file name (input).
unt unit numDer (input
uze use flag (input).
stetu5 1/'o s_at_5 _outD_t
TRW Houston System Services - 1 - (printed i2/18/86)

rlread.b(3) (Files) rlread.b(3)
NAMErl_ead
SYNOPSI_
subroutine rlread (iop,nrec,t,id,ed,data,status)integer io# (_)
lnteger nrecdouble precision t
character id
integer ed
double precision data (*)
integer status
DESCRIPTIONrlread
RELBET read from GFF files.
IOF-, i/o packet (lnDut/OUtpUt) .
nrec aesireo recora numDer (input).
time tag (output).
id frame ic {output].
eC ec_ status [output).
Oat_ OU_DU! aata from frame _output}.
status i/o status (output).
TRW Houston System Services 1 - (printed 12/18/86)

rltime.b(3) (Files)
ORIGINA.L p_,_: tS
OF POOR OUALITY
rltime.b(3)
NAME
rlt me
SYNOPSIS
subroutine rltime (iop,t,nrec,status)
integer, io_ (_)
double precision t
integer nrec
integer status
DESCRIPTION
rltime
RELBET interface to GFF routine gftime. Returns recordfirst record or end o? file ann big time tag (+- te30).
lop i/o Packet (input/output).
time tag (output).
nrec oesireo recoro number (input),
status ;/'o status (output).
Oirectly before
TRW Houston System Services - 1 - (printed 12/18/86)

rlwrit.D(3) (Files) rlwrit.b(3)
NAME
rlwrit
SYNOPSIS
subroutine rIwrit (iop,nrec,t,id.ed,data,status)
integer io# (_)
intege _ nrec
aoubie precision tcharacter 15
integer ed
oouble precision aata (-)
integer status
DESCRIPTION
rlwrit
RELBET write to GFF files
ioo 1/o packet (input/output).
nrec aeslreO record numoer input).
time _ag (input).
frame io (_nput).
e_ e_it status _ _nDut).
da_a uat& froF_ frame (inpu=
status i/o status (output).
COMMENTS
Differs fro_ gfwrit in that writing past the end of the file _s not anerror, even if aDpen_ mode is not speci{ied and cannot write to header.
TRW Houston System Services (printed 12/18/86)

ORIGINAL PAG_ IS
,OF POOR QUALITY
Cvprop.b(3) (Filter) cvprop.b(3)
NAME
Ovprop
SYNOPSIS
subroutine cvprop (tolO,xolo,tnew.xnew.cov)
_ouPle precision tol_
_ouPle precision ×ola (nso])
_ouD!e precision tnew
douDle precision xnee (nsol)
_ouble precision coy (nsol,nsol)
DESCRIPTION
predict covariance
cvprop_oi_
xoid
tnew
xnew
COV
O1_ time (input).
ola state (input)
new _ime (input).
ne_ state (input}.
cova_iance input/output}.
TRW Houston System Services (printed 12/18/86)

dkal.b(3) (Filter) dkal.b(3
NAMEdka!
SYNOPSISblock _ata dkal
DESCRIPTIONdkal
This block data routine initializes the commonusedby this program
TRWHoustonSystemServices 1 - (printed 12/18/86)

asmth.b(3) (Fi]ter) dsmth.b(3)
NAMEdsmth
S'¢NODSISblock _ata dsmth
DESCRIPTIONdsmth
This block aata routine initial izes the common usea by this program
TRW Houston System Servto,es - 1 - (printed 12/18/86)

getnxt.b(3) (Filter) getnxt.b(3)
NAME
getnxt
SYNOPSIS
sumroutine getnxt (tnxt,pob,ob,obtyp,ooslg,pstoD)
Oouole precision OP
cnaracter_4 obtyD
_ouOle precision obsig
double precision tnxt
DESCRIPTION
ge_nxt
get next time for sequential filter.
ob
obtyp
oDs]g
tnxt
observation (output).
observation type (output).
observation sigma (OUtDUt). flag tO telt
{output). flag _o tell if stop tlme (output}.
t_me of observation (output).
of observation _ime
TRW Houston System Services - 1 - (printed 12/18/86)

kalman.b(3) (Filter)
OR|G|N-_L PAGE IS
OF pOOR QUALITY
kalman.b(3)
NAME
kalman
SYNOPSIS
suDroutl
double
douDie
double
double
double
double
double
double
Qouble
double
ne kaiman (t,x,c,ob,y,aydx,v,eacrit,r,redit,uwterm))recision t
3recision x (nsol)
_recision c (nsol,nsol)
3recision ob
)recision y
)recision dydx (nsol)
)recision v
)recision edcrit
)recision r
)recision uwterm
DESCRIPTION
kalman
kalman
t
x
c
o_
Y
_ydx
v
filter.
current time (input).
state vector (inPut).
covaP_ance (_nbut/output).
_pue obser.va=lo_ (lnDu_.
computed observation (input).
partials of observation w.r.t, state (input).
residual variance (input).
e_crit e_lt cr_te_om (input).
residue; (output). residual edit flag (output).
uwterm the uderweighting term
TRW Houston System Services 1 - (printed 12/18/86)

krelo.b(3) (Filter) krelo.b(3)
NAME
krelo, kreloc
SYNOPSIS
subroutine krelo (t,x)
Oouble precision tdouble precision x (12)
entry kretoc
DESCRIPTION
krelo
kalman relative filter traj output routine for seauentlal filter
t filter time (input).
x filter state (input).
kreloc
close output file
TRW Houston System Services - 1 - (printed 12/18/86)

invrs.r(3) (RELBET/Filter) invrs.r(3)
NAMEinvrs
SYNOPSIS
subroutine invrs (n.a.ai,eps)
integer n
Oo_ble precision a(n.n)
doubie precision ai(n.n)
Qoubie precision eps
DESCRIPTION
invr$
matrix convert routine for smooth
n dimension of matrix
matrix to De inverted (input).
ai(n.n) inverted matrix (output).
eps th*esho)d for singularity (input).
TRW Houston System Services - 1 - (printed 12/18/86)

nkal.b(3) (Fi]ter) nka].b(3)
NAMEnkal
SYNOmSIS
suDrou_ine nkal
DESCRIPTION
nkal
This subroutine fetches the user inputs for the
this program
oommom D]ocks neeoeo by
TRW Houston System Services - 1 - (printed 12/18/86)
I
L__

nsmth.b(3) (Filter) nsmth.b(3)
NAME
nsmth
SYNOPSIS
subroutine nsmth
DESCRIPTION
nsmth
This subroutine fetches the user inputs for the common blocksthis program
neeOed by
TRW Houston System Services 1 (printed 12/18/86)

obest.b(3) (Filter) oDest.b(3)
NAME
obest
SYNOPSIS
subroutine ODeSt (t,x,obtyp,obsig,y,dydx,v,e,nob)
double precision e
double precision t
Ooubie precision x (nso])
character*4 oDtyp
double precision obsig
douD]e precision y
double precision dydx tnsol)
double precisiom v
integer nob
DESCRIPTION
obest
observat_o_ estimate for sequential filter.
edit criterion (output)
t time (input).
x state (tnDut).
obryD observatiom tyoe (input).
obSig ouservat_or slgma (input].
estimated observatiom (output).
dyox bartia)s of observations w.r.t, state (output).
variance of observation (output).
nOZ observation number.
TRW Houston System Services 1 - (printed 12/18/86)

obout.b(3) (Filter) obout.b(3)
NAME
obout, obcls
SYNOPSIS
subroutine obout (t,obtyp,redit,ob,r,v,o,pv)aouble precision t
character_4 obtyp
double precision obdouble precisiom r
aouble precision v
double precision b
double precision by
entry obc]s
t
obty#
ob
r
v
b
bv
obcls
DESCRIPTION
obout
ou:put routine for sequential filter
filter time (input).
frame i_ of current obs edit status of observation
oOservation val_
resiclual value
value of residual variance
solution bias
bias variance
ClOBe OLJTpUI g]le
TRW Houston System_:Serviees 1 - (printed 12/18/86)

Dcpt.b(3) (Filter) pcpt.b(3)
NAMEpcpt
SYNOPSIS
subroutine pcpt (p,c)
double #recislor_ p [nsol,nsol)
aouDie pr'eoislon c (nsol,nso_)
DESCRIPTION
pcpt
per{oPm operation ph]*c_Bhitr'anspose.
p state transition matrix [input).
c covaraince (input/output).
TRW Houston System Services 1 - (printed 12/18/86)

pred.b(3) (Filter) pred.b(3)
NAME
pred
SYNOPSIS
subroutine preO (t,x,c,tnxt)
double precision t
douole Preci$io_ × (nsol)
double precision c (nsol,nsol)
double Drecision tnxt
DESCRIPTION
pred
predict state, covariance at next time for sequential filter.
t old time (input/output).
x state (input/output).
c covariance (input/output).
tnxt next time (input).
TRW Houston System Services 1 - (printed 12/18/86)

psout.b(3) (Fi]ter) psout.b(3)
NAME
psout, pscls
SYNOPSIS
suOroutine psout (t,x)
aoubie precision t
_ouDle precision x (12)
entry DSCIE
DESCRIPTION
psoutoutput routine for sequentia_ filter
t filter time (input).
× filter state (input).
pscls
clost outDut file
TRW Houston System Services 1 - (printed 12/18/86)

ptbl.b(3) (Filter) ptbl.b(3)
NAMEptbl
SYNOPSISinteger function ptbl (t,tblcouplepmecisiontaouoi_precisio_ tb_ (*)
DESCRIPTIONptb]
Returnsa pointer to a time ncreaslngtable to the entry with the maximumtime tag at or before _ given time. Sentinal time tags are expectegat thebeginning anaend of the table, less tnan andgreater than, respectively,any expected time tag.
aesire_ time (input).
tbl time increasina taDl: im_J÷_
TRW Houston System Services 1 - (printed 12/18/86)

sfilt.b(3) (Filter) sfilt.D(3)
NAMEsfitt
SYNOPSIS
program sfil_
DESCRIPTION
sfil%
RELBET Kalman filter ariver
TRW Houston System Services - 1 - (printed 12/18/86)

sfinit.b(3) (Filter) sfinit.b(3)
NAMEsfinit
SYNOPSIS
subroutine sfin_t (t,x.c)
douDle precisior_ t
oouble precision × (nsol)_ouDle precision c (nsoi,nsol)
DESCRIPTION
sfinit
initialize sequential filter
t initial time (output).
x initial state (output).
¢ initial cova_iance (output).
TRW Houston System Services I - (printed 12/18/86)

sfout.b(3) (Filter) sfout.b(3)
NAME
sfout
SYNOPSIS
suDroutine sfou_ (:,x,c,pstop
oouble precision t
aouole precision x (nsol)
Qouo]e pPecisio_ C (nso_.nsol
DESCRIPTION
sfout
output routine for sequential filter
t filter time (input).
x filter state (input).
c covariance matrix (input). stoD flag (input).
TRW Houston System Services (printed 12/18/86)

smooth.r(3) (Filter) smooth.r(3)
NAME
smooth
SYNOPSIS
subroutine smooth (infil,outfil,cpfreq,cnrec)
cheracter*T2 infil
oharacter_72 outfi_
character-72 cpfreqcharacter.72 cnrec
DESCRIPTION
smooth
relbet smoother
infil input file name
outfil output file name
c_freq print frequency
cnrec number of recoras
TRW Houston System Services I - (printed 12/18/86)

snoise.b(3) (Filter) snoise.b(3)
NAME
snoise
SYNOPSIS
subroutine sno_se (to]Q,tnew,c)
aouDle precision _old
aoub]e preclSlO_ tnek'
double precision c {nsol ,nsol)
DESCRIPTION
snoise
a_d state noise to covariance for reIDet sequential fi]_er
tola last time (input).
tnew new time (input).
covariance lnpu_/outDut).
TRW Houston System Serv ces (printed 12/18/86)

stm.b(3) (Filter) stm.b(3)
NAMEstm
SYNOPSIS
subroutine stm (pni,told,xold,tnew,xnew)
double p_ecision phi (nsol,nsol)
douPle precision tola
double pmecisioP xol_ (nsol)
double precision tnew
double precision xnew (nsol)
DESCRIPTION
stm
state transition matrix
phi
toia
xold
tnew
xnew
state transition matrix (OutDut).
Pegin time (input).
state at old time (input
eno time (input).
state at hey,' time (inpu_
ORIGINAL PAGE IS,OF' POOR
" QUALITy
TRW Houston System Services 1 - (printed 12/18/86)

stmrv.b(3) (Filter) stmrv.b(3)
NAME
stmrv
SYNOPSIS
suProutine stmrv (pni,dt,xola,xnew)
double precision dt
double preclsio_ phi (5,6)
double precisio_ xnew (6)
double DPecision xolo (6)
DESCRIPTION
stmrv
State transitio_ matrix fop position and velocity' iB orDita] motion
dt
phi
xnew
xold
delta time (input).
state transition matrix (output).
next pos_:ion and velocity (input).
last position and velocity (input).
TRW Houston System Services - 1 (pPinted 12/18/86)

stprop.b(3) (Filter) stprop.b(3)
NAME
s_prop
SYNOPSIS
subroutine stprop (tola,t,x)
double precislO_ told
_ouble orecisloN t_ouble precision x {nsol)
DESCRIPTION
stprop
state propagation
toi_ old time (input).
t new time (input).
x hey, state (input/output).
TRW Houston System Services 1 (printed 12/18/86)

uvw2m.b(3) (Filter uvw2m.b(3)
NAME
uvw2m
SYNOPSIS
subroutine uvw2m (c)
aouDle precision c (nsel,nsol)
DESCRIPTION
uvw2m
this routine rotates uvw coordinates to m50
the full sotution state oovariance
TRW Houston System Services 1 - (printed 12/18/86)

vlrest.b(3)
OF POOR ,;;:ALFI'y
(Filter) vlrest.b(3)
NAME
vlrest
SYNOPSIS
subroutine v)rest (t,obtyp,ob,v)
double precision t
character*4 obtypdouble precision ob
double precision v
DESCRIPTION
vlrest
lrbet3 variance estimate for sequential filter.
and range bias
t
obtyp
ob
V
time (input).
observation type (input).
the actual observ&tion of range (input)
variance of observatiom (output
for range, range rate,
TRW Houston System Services - 1 - (printed 12/18/86)

cmp2sg.c(3) (Fman) cmp2sg.c(3)
NAME
main. cmo2sg - comoare relative difference to compute_ sigmas
SYNOPSIS
main(argc,argv)
int argo;
char -_argv:
char _cmD2sg(framel,frame2a,frame2b)
char _framel;
char _fra_e2a;
char *freme2b;
DESCRIPTION
main
cmp2s 9 reads in two files including a relative trajectory difference
file ano a file containing tme computeO sigmas associated with
some filtering process in the same frame format as a relative
trajectory file
-r__ indicates file name of relative tra_ file
-c__ inoicates file name of sigma oata =i!e-t i_ time tnres_ol: of comoariso_ ( default 1s
S ln_icatin_ tnat 3-sigma is _ gooooomoarison)
NOTE: Output text files are CMP_POS for position info
and CMF_VEL for velocity i_fo
cmp2sgframel
the current frame from Relative difference file 1
f rame2F. the frame from relative s_gm& file 2 <= time of framel
frame2b the frame from relative sigma file 2 > _ime of frame1
TRW Houston System Services 1 (printed 12/18/86)

drpst.b(3) (Fman) drpst.b(3)
NAME
arpst
SYNOPSIS
block aata drpst
DESCRIPTION
arDst
This block aata routine initializes the common used by this program
TRW Houston System Services - i - (prinSed 12/18_86)

eph2rel.c(3) (Fman) eph2rel.c(3)
NAME
main, eph2rel
file as cutout
reads two ephemeris files and creates relative trajectory
SYNOPS[S
main(argc,argv)
int argc;
char =_argv;
char _eph2rel (framei,frame2a,frame2b)
double *frame1;
oouble _frame2a;
double _frame2b;
DESCRIPTION
main
eph2re% reads two ephemeris files ann creates a relat!ve trajectory file
output. The first ephemeris file is tne Oase file name. The second
ephemeris_file2 is the file to _e interpolated for the relative portioR of
the frame. The output relative trajectory file is assigned the name of
ephemeris file REL.
TRW Houston System Services 1 - (printed 12/18/86)

filedit.c(3) (Fman) filedit.c(3)
NAME
main, text_in, gff_in, ref_in, edit_frame - gff file editor
SYNOPSIS
int main(argc,argv)
int argc:
char *_argv;
char -text_in(inframe,infile)
char *inframe;
char _infile;
char _gff_in(inf_aAme,refe_ence,end)
char _inframe;char _referenoe;
char _end:
char *ref_in(reference,infile)char *reference:
char _infile;
char *edit_frame(imframe,reference)cha_ _inframe:
char *reference:
DESCRIPTION
the following parameters are set by command line arguments
main
Filedit reads i_ one of two edit sources to be useo to east a
specified file depending uo_r_, certain D_ogram dependentcmiTerior,.
Mu!tIDie frame _ds can be specifieO _c _n_ic_te the framesto be edited
USAGE:
filedit <-a__><-c><-t__><-c__><-p__><-f__><-o__><-h__><-i__><-j__>
where
-a__ Provides the edit value to be applied.Zero is the same as default.
Negative input indicates editted framesare to be uneditted.
Positive input indicates uneditted
frames are to be editted.
..When used with -c indicates that onlyframes bearing the, specified edit va_ueare effected.
Default is 999
-t Indicates file name wherein edit in_ervais
a_-e specified by two text fields :The first field should be begin time
The second field is an end time of editinterval
Frames associated with specified (<-p>)frame_ids are editted witt_in text inputtime intervals
Default is to process whole file
-c Indicates that the edit process willchange the edit status of all frames
TRW Houston System Services - 1 - (printed 12/18/86)

filedit.c(3) (Fman) fitedit.c(3)
gff_ininframe
possessingthe desired edit value inputusing the <-a> option or defaulte¢ to 999.For examplein the default case frameswith 999 receive -999 if the proper editcriterion are met. In this usage
negative values may be used with <-a>.
The object is to undo a previous edit
operation or redo a previous operation.
This option can be used with both <-t>
and <-f> options and has the same purpose
-o indicates file name of gff file to be editedIf unused or same as the reference file name
tnen the reference file is to be edited.
-p__ indicates list of frame_ids to be effectedon the file to be editted
-f _noicates file name of reference gff filewhose frames are used in edit criterion
of input fiie frames.If same as the f_ie to be edite_ file name
then the reference file is to be edited.
-h indicates criterion for edit to be
_eterminec fron, frames on the reference file
necessary only if -i__ option soecifiedin which case _ oouoie D_ec_slon value
_s expected w_cr, is treatec as a sort
of threshold tc be _nterperteo as
ignored if -i option not used
-i im_icates frame pos source of e_it criterionfor frames on the reference file.
if not specified edit status portion assumed
and target frames will be editted if theedit status is set to edit
of the sDecif_e_ frame of input fileinteger input expected which indicates aoubte
precision looatiom on data portiom of ÷tame
-g__ _naicates frame i¢ source of edit criterionfor frames on the reference file
(only one allowed).
Ignored if reference file is to be edited.
-j__ indicates the type of test use_ to compareinput thresho.d with reference file frame
information as criterion for edit,
:0: aDs(frame info) >: aDs(threshold)
>0: frame info >: threshold<0: frame info <: threshold
ignored if -i option not used
NOTE: if the frame bein_ testedwas a valid frame before the test
then the results of the test will
change the value of the edit statusflag in some cases even i_ the result
shows valid data, however in thiscase the frame will still be valid.
current frame from file 1 the file to be editted
TRW Houston System Services - 2 - (printed 12/18/86)

filedit.c(3) (Fman) filedit.c(3)
reference the comparison frame from file 2 <: inframe
end not used
this function edits the input frame on the basis of
reference file which has the greatest time-tagtime_tag and returns the output frame
the frame from the
<= to the input frame
ref inr_ference the input frame from the reference file
infile unused
this functiop edits the reference frame based on info in the
reference frame and returns the output frame
edit framein_rame
input frame to be eOitted
reference the reference frame
this function examines the reference frame to Oetermine the edit status ofthe input frame and returns the output frame
TRW Houston System Services - 3 - (printed 12/18/86)

gbfcom.c(3) (Fman) gbfcom.c(3)
NAMEmain.gbfcom- mergefiles
SYNOPSIS
main(argc,argviint argc;char _argv;
void gbfcom(out_name,base_name,mergename)char -out_name.-basename,,merge_name;
DESCRIPTION
main
gbfcom reads two files an_ performs a merge using the first
input file as a Pase file and the second file as a mergef_ie ie., if two frames with identical frame ids occur at
the same time then the base file frame is discarded an_
the mer#e file frame used the new fiie _s create¢ inthe first argument
Usage: gbfcom out inl in2
TRW Houston System Services - 1 (printed 12/18/86)

mkinit.c(3)
OF POOR Q_jAL[TY
(Fman) mkinit.c(3)
NAME
maim, tel_in, eph2_in, mkimit -
rel traj file
creates text file from two traj files or a
SYNOPSIS
main(argc,argv)
int argc;
char _argv;
char _rel_in(framel,p_char)char _framel;
char *p_char;
char _eph2 in(framel,frame2a,frame2b)double *frame1;
double _frame2a;double _frame2b_
char _mkinit(time,base.target)
double _time,_base,_target;
DESCRIPTION
ma_n
mklnit rea_s two trajectory =i%es Cr one rela_ive Trajector>'
file a_d writes out te×_ _o De used for imit l_DUt _nput
TRW Houston System Services 1 (printed 12/18/86)
nrpst.b(3) (Fman) nrpst.b(3)
NAMEnrpst
SYNOPSISsubroutinenrpst
DESCRIPTION
nrpst
This sucroutine fetches the user inputs for the common blocks neeOed bythis program
TRW Houston System Services - 1 - (printed 12/18/86)

obsnois.c(3) (Fman) obsnois.c(3)
NAME
main, combine -
fiieobsnois merges the obs data with the noise data into one
SYNOPSIS
int maln(argc,argv)
int argc:
char _argv;
char *combine(frame,frame2,frame3)char _frame;
char _frame2;
char _frame3;
DESCRIPTION
main
obsnois merges observation _ata and noise data into one file.
data is stored in the first location of obs data. Usage:
combineframe
obsnois obsfile noisefile
The noise
The output file _s a binary file with OF< attacned to the firs_ input=iie. (obsfile). ",_ any, of tne input fives is unavailable . an errormessage is generated.
Note: User needs to run oDsnols repeatly for each frame id until all of
the desirable types are complete_. The output fi}e is the inputfile for the next run. For example:
We iqave tme following :
oPsnois fBobs Obs_c_nols_Na
The output file is feobs_ON. For tfqe next fur,. we will have
obsnois fBoDs_0N 0bs_ddnols_ND
Now the output file is feob5 ON ON.
the current frame
frame2 the beginning of the bracket frame
frame3 the.end of the bracket frame
merges the obs data with the noise data. The noise data is stored
in the fi#st location of the data portion.
TRW Houston System Services 1 - (printed 12/18/86)

qaatt.c(3) (Fman) Qaatt.c(3)
NAMEmain. angle rate - Generatesangular accelerationand gff file.
SYNOPSIS
int maln(argc,argv)
int argo;
chap _argv;
char _angle_rate(frame,Dtr)
chap _ptr;
chap *frame;
magnitude text summary
DESCRIPTION
ma]n
Qaatt provides output te stdout documenting attitude files
Usage:
qaatt <-e><-b > filel .....
where -e is the maximum acceptable angular acc magnitude(default . 10)
-b is the mlmlmum angular aoc to determine an event_aefault .OO05_
Tne potions ape parseo and the appropriate variao!es are set.
If a file is unavailable, a_ error message is generated.
:dart creates an output gff with the angular acceleration vector aDO
magnitudebetween the two input angular Pates:
the frame ld fop _is file is "attr." Also, for an T point > e and any
point > D, a record is written to stdout containing time,"attr","valid"or
"edit", duration .and magnitude.
angle_Pa_ecomputes angular rate and documents
ptr character Do!PreP,not used
frame current frame of data
TRW Houston System Services 1 - (printed 12/18/86)

ORIG,,_..,. _" "c
OF POOR QUALITY
qacover.c(3) (Fman) qacover,c(3)
NAME
maim, cover file - Generates a coverage history summary
SYNOPSIS
int main(argc,argv)
in_ argo;
Char =*argv;
char *cover_file(frame.ptr)
char *ptr;
char *frame;
DESCRIPTION
main
qacover provides output to stdout summari_in@ the coverage of a specifieo
data type from a gff file, Usage:
qacover <-I ><-f > file1 .....
where -t is the minimum time gap for lost oata[default 30s)
-f frame id [default no Check on frame id)
The obt]ons are Garsed and the appropriate variables are set. The files
are parsee arc output text _s written untO! the last file has beer
Processed. i# & file 1s unavailable, an e_ror message 1s generateo ano
the next file is processed. The output text contains the s_ar, t time Of
the interval, tne ÷tame iG, Oata indicator _ va! i_.lost Or e¢_=], t_
ouratiom o _ the interval alq¢ the number of points in the iste_vz_.
cover file
generates coverage history
ptr character pointer, not use¢
fram_ CU!'l_is;qt Oa_- ,'=rarn_
TRW Houston System Services - 1 (printed 12/18/86)

qanois.c(3) (Fman) qanois.c(3)
NAME
main, qanois -
graphicgenerate textfi!e for noise statistic and binary file for
SYNOPSIS
int ma_n(argc,argv)
int argc:
char -_argv;
char -qanois(frame,ptr)
char _rame;
char *ptr;
DESCRIPTION
main
qanois p_ovides output to stOout documenting noise statistics for obs
gff file and binary file for graphic. The input is from Odnols. Usage :
Qanois <-f ><-_ ><-q><-m >inputfilewhere -f is the frame ia
-i is the index tc difference table to use for
noise souroe[defau!t 6tn number )
-q__ is the auantlzat_on valueoefault see above
-_ is the m_nin, um number of points acceotabie for
noise oons_oerarlom (default see above)
The options are parseG and the appropriate variables are set.
If & file is unavailaoie, an error message _s generated. The outputtext has the following format:
Begin_time Data type "noise" duration quantized average_obs number ofof_noise value measurement points interval Ex: 1000.0aran noise 384.0 .01 50.0 90 1384.0 dramnoise 768.0 .02 90.C; 180
Interpretation:
At 1000.0 Range date noise average .01 meters for 384.0 seconds
with an average range measurement of 50 meters and a total of90 observation marks
etc...
The output binary file used the following naming convention
Inputfile_name plus suffix N plusfirst letter of the frame i_ desired
The frame of the output binary file is described as follows
Standard header where edit status indicates number of pointsin the noise interval
The data portion of frame provides the following infOEnd time of noise interval
Average value of observation
Computed noise selected by Index
Note: User needs to run qanois repeatly for each frame id until all of
the desiraPle types are finished.
the following defines depend on the format of the input frame
qanois
TRW Houston System Services 1 - (printed 12/18/86)

qanois.c(3j (Fman) qanois.c(3)
frame
ptr
current frame of data
character pointer, not useo
TRW Houston System Services 2 - (printed 12/18/86)

qaranjmp.c(3) (Fman) qaranjmp.c(3)
NAME
main, rrrfile, jmpcomp
difference history
SYNOPSIS
int main(argc,arg\,)
int ergo;
char _*argv;
char _rrrfile(frame)
char _frame;
char _jmpcomp(frame,ptr)
char *ptr;
char _frame;
Generates a radar range versus range rate
DESCRIPTION
main
aaranjmp provides output to steout documenting jumps in range compared w_tn
range compute¢ from range rate. The follovJ_ng intervals are aocumented.
If range is <= Rbound; !_ <= _ife < 3030 <: diff
> RPound: 30 <: _f_ < 7070 <= di_f < 100
10C' <: di_f
Usage:
qaranjmp <-r><-g> file1 .....where: -r is Roounc (oefaul_ 6000 meters)
-#__ _s ma×_mu_ aqlowable gap for computation ofof jump in range (Uefault 50 seconds)
The options are parsed and the appropriate variabies are set.
1; a file is unavailable, e,- er:_or message is generated.
An _nterim gff file is cPeateo v,'it_ tne same name as the _npu= fiiesuffixed with Rd. Th_s {lie contains a recoPc with the range and
range rate in one record and no other observations. This file can be
removeO after program execu=iom: it has e frame io of "rand".
For each point that falls ir, the previously defined interval a record
is written to stdout containing start time of interval, "jump", "range"
duration of interval, and magnitude of the jump.
rrrfile
creates a range and range rate obs file
frame current frame of data off obs file
jmpcomp
computes interval of range jump
otr character pointer, not used
frame current frame of data from r/rr file
TRW Houston System Services 1 - (printed 12/18/86)

qastar.c(3) (Fman) qastar.c(3)
NAME
main, star_track, getangle, test_print - Star Tracker obs history
SYNOPSIS
in_ main(argc.argv)int argo:
char x_argv;
char *star track(frame,framel,frame2)
char _frame:
char *frame1._frame2;
char _getangle(frame,infile)char *frame;
char _infile;
double *now;
aoubte angledouble *end;
hi(nosy,angle,end)
DESCRIPTION
m_in
Qastar prov_oes ou_out to s_out mumm_izln§, _ne star observations on
art oDservatior, file. Usage.
qastar <-p><-y><-i__><-u__><-t ><-q__> obsfile <attfile>where -p use the gff cre_te_ from previous run of
aastar {name input via obsfile) to
recompute printed output (attfile not used).where -y use the Y star tracker instead of the Z.
where -l___ Oefines _he Oelta angle reflecting t_e low
nolse thre_iqoio set_inc_ fo_ spotting s%ars
v;here -u__ oefines the oel_a angie re_lect_ng tt_e mior,
noise threshold setting for spotting starswhere -t oefines maximum time difference allowable
oetween input ouaternionE and observations
An input observation file( oDsfiie) and attitude file( attfile) aperequired
inputs (except when using the <-p> option, see above.
The Z star tracker is assumed unless the -y option is requested.The options are parsed and the appropriate variables are set.
Output text is written for each interval where two consecutiveobservations
are fixed on the same inertially fixed object. This interval isaccumulated.
The text includes the following information: time of beginning,
"star",'iedit",duration of interval,
average angle over the interval. An output gff file is created with the
name the same as the input obs file plus the suffix cT The data onthe
_ite is:time of the end of interval, "star",mode,azimuth,elevation andangle.
NOTE: The angle placed on each frame is the angle between the pointingvectors represented by the previous valid frame and the current frame.
star track
de_ermines star obs
frame current data from obs file
TRW Houston System Services 1 - (printed 12/18/86)

qastar.c(3) (Fman) qastar.c(3)
frame2 current aata from attitude file that sDanframe
ge_angleframe current data from _nertial star tracker angle gff file
infile not used
retrieves the _nertial pointin# angle difference
test_print
now
angle
end
time tag of current vector
angle measure Detween last inertial
point_ng vector and current vector
time tag of last vector
this function tests the angle tolerance for printe_ output
TRW Houston System Services 2 - (printed 12/18/86)

qasv.c(3)
ORIGL_,,A,. P,-_,,,.._ !,3
OF POOR QUALITY
(Fman) qasv.c(3)
NAME
main, sensed_vel - Summarizes the sensed velocity file and creates a sensed
acceleration file
SYNOPSIS
int main(argc.argv)
int argo;
char =*argv;
char =sensed.vel(frame,ptr)
char *ptr:
char _frame;
DESCRIPTION
_ain
qasv Drov_oes output to stdout documenting e_ited sensed velocities and
DuPn interva!s. Usage:
qasv <-e><-b > file1 .....
where -e is the maximum acceptable sensed acceleration
(default IOO_
-t is the mimimum burn sensed acceleration
(default ,OO3S9)
Tne options are carseC and the appPODriat% variables are set. Tiqe f4les
are Da?seo anG OUTPUT Text is written until the iasz fi_e has Dean
the next file is Drocessed. A gff file is generated containing thesensed
acceleration vectors and the magnitude of the sensed acce]eration al
limes
of events. • The frame id for this file is "sacc."
For each point >e or >b a record is written to stdout containing start
time. "val]c" or "edit", "sacc'. delta time, arc magnitude of the sensed
acceleration. The intervals ar._ not accumuiatee
sensed_vel
computes semse_ accel. & documents interval
ptr pointer, not used
frame current data for file
TRW Houston System Services - 1 - (printed 12/18/86)

rdwt.c(3) (Fman) rdwt.c(3)
NAME
main, write file - write a subset of a file with user specified frame
and time
id
SYNOPSIS
ink maim(argc.argv)
int argc;
char =*argv;
cmar ,write_file(frame,ptr)
char- *ptr;
char ,frame;
DESCRIPTION
main
QOwt read in a file ana write to the file with user specified frame
time. Usage:
rdwt <-f ><-b__><-e> filewhere -f frame io iaefault no cneck on frame Id
-b oegin time (def&ult to file begiq time}
-e end time (default to file end tlme_
The ootions are barmen and the approDr,ate variables are set.
is D_med and O_tDut bima_y f_ie _ written. If inDu_ fi_e 1s
unavailable, an error message _s generated.
write file
D_r pointer, not usec
frame current frame write to a file _,ritr user specigied time
frame io
and
Tr_e file
and
TRW Houston System Services 1 - (printed 12/18/86)

read_set.c(3) (Fman) read_set.c(3)
NAME
main, read_set, print_record -
taOe output processor
reads SET file which is output from sensor
SYNOPSIS
main(argc.argv)
int _rgc;
char *_argv;
void read_set()
char _print_record(time,count)double time;
int _count;
DESCRIPTION
main
read set reads in _ b_nary file create_ by the stop processor
am¢ provides a printe_ output option over a specif#ed
_Ime sDan
-f indicates file name of SET fiie
-b indicates beg_n time in #m= seconds,
-e indicates last t_me im gmt seconds
-p__ indicates print frequency oDtior_Nonpositive means first ano last only
TRW Houston System Services 1 - (printed 12/18/86)

read_sit.c(3) (Fman) read sit.c(3)
NAME
main, read_sit, print_recoro - Pead the SIT Oat8 output by stop
SYNOPSIS
main(argc,argv)
int argc:
char _aPgv;
void read sit()
char -print_record(time,count)
double time;
int _count;
DESCRIPTION
main
read_s_t reads in a binary file create_ oy the stoo processor
and provides =-, printed output opt#on over a speoi÷ie¢
time span
-f in¢icates file nnme of SIT file
-b__ indicates beoin time ir gmt seconds
-e indicates lest =_me in gm: seconcs
-S irlolcetes Driqt freauencv OO_lor:
Nonpositive me_ first anc last omi_
TRW Houston System Services - I (printed 12/18/B6)

rlvsrl.c(3) (Fman) rlvsrl.c(3)
NAME
main, rlvsrl
SYNOPSIS
mai n(argc, argv)
int argc;
char _argv;
char _rlvsrl(frame!,frame2a,frame2b)_ouble _framel;
aoubte _frame2_;
double *frame2#;
DESCRIPTION
main
rlvspl reaos two relative trajectory files and determines thediference between states in UVW coorainates
TRW Houston System Services 1 (printed 12/18/86)

rptost.b(3) (Fman) rptost.b(3)
NAMErptost
SYNOPSIS
program rptost
DESCRIPTION
rptost
Converts roll/pitch to shaft/trunnion reference.
TRW Houston System Services - 1 - (printed 12/18/86)

search.c(3) (Fman) search.c(3)
NAME
File, Time, Radius, Begin, End. Prime_id, Second id, HelD. main,gff fiie procor
search -
SYNOPSIS
FILE _File;
double Time,Radius,Begin,End;
char *Prime _d[],*Second_id[];
int Help;
int main(argc,argv)
int argc;
char _argv;
void search()
DESCRIPGION
main
this program extracts intervals of Oesired info frames from the text files
produce0 D'> the PelDet qa processors _hePe the frames Rave irle genera] foreas follows:
time-tag(number} ID[string) INFO_TYPE(string) our'ation(numPer) number ...
the information used on each frame comes from the f_rst three fields out
the complete frame is read im and output if applicaD]e
invoke this function:
searcr_ -_ -_ -_ -r
where:
-b -e -P . . . -s ..
-h - indicates help option which displays primary andoependent labels available for extraction
The use of this option precludes all o_hers
-f - indicates the fie name of the input text file
-t - is the origin tine of interest
-r - is the radius about the origin which encioses the timeinterval of interest
-b - is the begin time of the specified interval of interest-e - is the end time o c the specified interval of interest
-p - indicates the lis: of frame IDs desired
-s - indicates the 1 is: of INFO TYPEs desired associatedwith the list of /Ds
TRW Houston System Services 1 - (printed 12/18/86)

sln2rl.c(3) (Fman) sln2rl.c(3)
NAMEmain,out_tel, out_coy, out_bias, file_size
SYNOPSIS
int main(argo.argv)
_nt ar,gc;char -_argv;
char -out rel(inframe)
char _inf_ame;
char =out_cov(inframe)char _inframe;
char _out_bias(inframe)char _inframe:
int file size(file id)
char ,,fiTe_id;
DESCRIPTION
main
slr,2ri r-eaas an arbitrary sizeo (nsol ; solution file outpul b\
elther the kaimar or smoothin£ filter ano genersTes
relative trajectory files for soiutlOr s_ales- Covarianoe file in tne form of UVW relative trajectory files
where the noise sigmas re#rese_ting the base statesolution and relative state solution ir, UVW o_
the base solution state are presenteo as a 12- elementvector an¢ the bias sigmas follow
bias solution _ile containing the bias solution for as many
obs solveo fo_ pe _ _r_mesin2ri <-r > fiiel <-c > file2 <-D > file3 <-n > nsol
<-s > file4
where -r indicates create the rel traj-c indicates create the covariamce soln file-b indicates cmeate the b_as soln file
-n is the s_ze of the solution vector
(default 16)
-s is the input solution file
TRW Houston System Services (printed 12/18/86)

stop.c(3) (Fman) stop.c(3)
NAME
main, stop - sensor tape output processor
SYNOPSIS
main(argc,argv)
int argc;
char =*aPgv;
char _stop(framel.frame2a,frame2b)
chap *frame1;
char _frame2a;
char _frame2b;
DESCRIPTION
main
stop reads in two files including a relative trajectory file
and a sensor data file which is created by the downlist
program specifically fop the purpose of writing two
binary files of SENSOR input data calle_ SIT are SET
-r _ inoicates file name of relative zraj f3]e
-S__ indicates file name of sensor oata file
frame2a
frame2b
the current frame from Sensor file 1
the frame from relative traj f41e 2 <= time o_ frame_
the frame fpoRi relative traj file 2 > time of framei
TRW Houston System Services - 1 - (printed 12/18/86)

aero.b(3) (Force) aero.b(3)
NAME
aero
SYNOPSIS
subroutine aero (rv,rvt,rsun,rnp,a)
aouble precision rv (3)
Ooubte precision rvt (6)
double precision rsun (3;
double precision rnp (3,3)
double precision a (3)
DESCRIPTION
aerc
Executive for eerooynamic effects on m50 acceleratiom an_ boay angutaracceleration.
rv
rvt
rsu_
rnp
m50 position of vehicle vector (input)
true of Gate state (input)
m50 position of sun vector (input)
mSO to true of date matrix (input)
m50 acceleration (ouput)
TRW Houston System Services (printed 12/18/86)

choky.b(3) (Force) cbody.b(3)
NAME
cbody
SYNOPSIS
subroutine cboay (mu,r,a)
double precision mu
_ouDie precision r (3)
aouPle precision a (3)
DESCRIPTION
cbody
Computes central bogy acceleration.
mu gravitational parameter (input)
position relative to central Dory
accelaration (output)
input)
TRW Houston System Services - 1 (printed 12/18/86)

cdrag.b(3) (Force) cdPag.b(3)
NAMEcarao
SYNOPSISsubroutineodrag [w,ad,f)doubleprecision w (3}douDieprecision ad_oubleprecision f (3)
DESCRIPTION
cdra9
Computes constant area _rag force.
w wind in body coordinates (input)
ad density of atmosphere (input)
f drag force (output)
TRW Houston System Services - 1 - (printed 12/18/86)

¢ylar.b(3) (Force) cyldr.b(3)
NAMEcylar
SYNOPSISsubroutine cyldr [wb,rho,fb)double#recision fb (3)aouD_eDrecision rho
_ouble precision wb (3)
DESCRIPTION
cyl_r
compute force an_ torque due to aerodynamic forces on a cylinder
fb drag force in body coordinates
rho atmospheric density
wD wind vetocity in body coordinates
TRW Houston System Services - 1 - (printed 12/18/86)

getm.b(3) (Force) germ.b(3)
NAMEgetm
SYNOPSISsubroutinegetm(t.m)doubleprecision tooubleprecision
DESCRIPTIONgerm
Fetchesmassfrom masstable.
t time massis desired (input)
m vehicle mass(output)
TRWHoustonSystemServices (printed 12/18/86)

harm.D(3) (Force) harm.b(3)
NAME
marm
SYNOPSIS
subroutine harm {rg,gg)
Oouble preclsion rg (3)
double precision gg (3)
ORIGINAL m,,_. IS
DE POOR qUALITY
DESCRIPTION
harm
Computes acceleration due to harmonic _e×pansion terms in gravitational
fiel_ of central body.
rg position vectcr of reference vehicles id earth-fixed COOrdinates(input)
gg acceleration in earth-fixed coordinates (output)
COMMENTS
Maximum 8tn Oe_ree, 8th order.
TRW Houston System Services 1 -- (printed 12/18/86)

solrad.b(3) (Force) sotrad.b(3)
NAME
solra_
SYNOPSIS
subroutine solrad (rv,rs,acc)
double precision rv (3)
aoubie precision rs (3)
oouDie precision ac_ (3)
DESCRIPTION
solraa
Computes acceleration due to solar radiatior, pressure.
rv mSO position of vehicle (input
rs mSO position of sun (input)
acc acceleration (output)
TRW Houston System Services 1 " (printed 12/18/86)

svelbs.b(3) (Force) svelbs.b(3)
NAME
svelbs
SYNOPSIS
subroutine svelbs (v,t,m,as)
integer v
_ouble brecision t
_oub]e precision m (3,3)
Oouble precision as (3)
DESCRIPTION
svelbs
Computes bias anO unbias of sensea acceleration.
vehicle id (input)
desired time (input)
DoOy to inertlal matrix (input)
as sensed acceleration (input/output)
TRW Houston System Services 1 (printed 12/18/86)

svftch.b(3) (Force) svftch,b(3)
NAMEsvftch
SYNOPSISsubroutinesvftch (ivloc, inc,tc,tnew)_ntegerivloc_nteger_=doubleorecision tcdoubleprecision tnew
DESCRIPTION
svftch
Computes sensed acceleration.
ivloc vehicle id (input).
inc step direction (input).
tc current time (input).
tnew next time (output).
TRW Houston System Services 1 - (printed 12/18/86)

tblook.b(3) (Force) tblook.b(3)
NAMEtblook
SYNOPSISsubroutine tblook (imx,ltb,tb,t,i)integer imxinteger ltbdouoleprecision tb [lib, lmx)doubleprecision tinteger i
DESCRIPTIONtblook
Finds first entry in a time increasing table that is at or before a giventime. The table is doubleprecison with the first slot the time, If allentries are after the time, an indexof zero is returned.
imx
ltm
_b
t
i
COMMENTS
max index to table (input)
aouole word length of taole entry (input)
table (input)
desired time [input)
index to t_ble (input/outPut)
The index must be _ni_i_tized to a value less tnan or equal to theindex value.
maximum
TRW Houston System Services 1 - (printed 12/18/86)

vntfch.b(3) (Force) vntfch.b(3)
NAMEvntfch
SYNOPSISsubroutinevntfc_ (v,tc,tnew)integer vdoubleprecision _cdoubleprecision tnew
DESCRIPTIONvntfch
Fetchesvent force of eachvehicle,
vehicle id (input)tc current time (input)
tnew newtime (input/output)
TRW Houston System Services 1 - (printed 12/18/86)

wndang.b(3) (Force) wnaang.b(3)
NAME
wndan9
SYNOPSIS
subroutine wnaang (w,ws,sb,cb,sa,ca)
_ouble precision w (3)
_ouPte precision WS
_ouble precision sb
double precision cD
double pre:ision sa
double precision ca
DESCRIPTION
wndang
Computes sines and cosines of sideslip and attack angles.
w
ws
sD
cb
Sa
Ca
wind in body coordinates(input)
wind speed(output)
sine of side siip angle(output)
cosine of side slip angle(output_
sine of angle attack(output)
cosine o_ angie attacK_o_tput)
TRW Houston System Services - 1 - (printed 12/18/86)

zutek.b(3) (Force) zutek.b(3)
NAME
zutek
SYNOPSIS
subroutine zutek (wb,rho,fb)
doubie preclsior_ w_ (3_
couple prec_slon rno
double precision fb (3)
DESCRIPTIONzutek
Computes aerodynamic force and torque using zuteck curve fit.
wb wind velocity in boay coordinates (input)
rho atmospheric density (input)
fb Orag force in oody coordinates (output)
TRW Houston System Services 1 (printed 12/18/86)

file2io.c(3) (Gbfile)
ORIGVT_AL m" _ IS
.OF POOR QUALITY
file2io.c(3)
NAME
file2io, get_next_frame - function for creating bracket times from
file.
second
SYNOPSIS
char-file2io(inframe,file_info)char _inframe;
char *file_info;
double _get_next_frame()
DESCRIPTION
file2io
inframe Oata frame of previouslly reaO gff
file infc file information of input gff
file2io sends the data frames which nave times Dracketting the time of t_einput frame time to the function specifiea in the input file structure.
Ne_e if no bracket interval available then nulls are sent. Warning: The
presence of static variables makes this function am unlikely canaiaate for
general use except for the purpose for which it was written. This purpose
_s to open and manipu!ate one fi]e pe-,e×ecution in _esDo;qce to pe_ng
invo_e¢ Dy fiteio
getnextframe
get the De×t frame , check first for end of file , check
frame id , check next for edit sTaTus if necessary
_ex= for proper
TRW Houston System Services I (printed 12/18/86)

fileinfo io.c(3) (Gbfile) fileinfo io,c(3)
NAME
fileinfo io - a gbf inout/output routine for recursive FILE_INFO structures
SYNOmSIS
char ,,filelnfo to{frame,file infol
char _frame:
char _file_info:
DESCRIPTION
fileimfc io
frame current frame from driver file
file info FILE INFO structure pointer see fileic.h
This routine enaDles the programmer to utilize the f_le_o process to oDtalneach frame from some input f_le and perform a mult_pie set of functions
each ef which result in a frame output tc _ soecific file. The output
process o = fiielo is not invoked. The power of this process is _n the
recurslve data structure FILE_INF0 (see fileio.h}.
TRW Houston System Services - 1 - (printed 12/18/86)

fileio.c(3) (Gbfile) fileio.o(3)
NAMEBaseTime,fileio - gff file input and output routine
SYNOPSIS
CALTIME BaseTlme:
int fileio( in file,out suffix,out size)struct FILE INF0 _in file;
char _out_s_ffix; --
int out_size;
DESCRIPTION
fi!eio
in file
out suffix
out size
structure aefining input file
suffix to be cateneatea to input file name for new file
size of output data recor, a:
if <0, same as input;
it =0, no output fiie;
if >0, output size.
file_o r'eaas a gff fiie ano creates a new gff file with datatrlat is # function of the _nput file at a subset of the time
points or, the input file.
TRW Houston System Services - 1 - (printed 12/18/86)
gbHBufMove.c(3) (Gbfile) gbHBufMove.c(3)
NAMEHStoHB,HBtoHS- movegbf header infor to and from buffer
SYNOPSIS
void HStoHB(_drbuf,gbf
GBFILE *gbf;char _ndrbuf;
void HBtoHS(gof,hdrbuf
GBFILEPTR gbf;chap *hdrbuf;
DESCRIPTION
HStoHB
shifts informatiom fr'om heaaer structure to buffer.
is set to the current aate in both structures.Tme uo_a_e Oate field
HBtoHS
shifts information from buffer to heaOer structure. The
record size, orig]rt, and time word pointer are also combuted
time offset
TRW Houston System Services 1 - (printed 12/18/86

gbfio.c(3) (Gbfile)
OF POOR QUALITY
gbfio.c(3)
NAME
gbfnew, gbfwrt, gbfopn, gbfcls.
FORTRAN and gPfile C routines
SYNOPSIS
gbfdfc, gbfops C interface between
void gbfnew(file,fname,hdri¢,joodes,wrdfrm,oate,dates,status)int _file;
char =fname;
char *hdrid;
char *joDdes;
int _wrdfrm;
int *date;
double *dates;
int *status;
void gbfwrt(file,dfrbuf,status)
int *file:
double _dfrbuf;
int _status;
void gbfopn(file,fname,status)
int -file;
char _fname;
int *S_US;
void gbfcl_(file.status}
int _fiie:
lnt _status;
void gbfdfc({i;e.dfrbuf,status)
lnt _fi]e;
double *dfrbuf;
int _status:
void g_fops(fnameJ
char _fname:
DESCRIPTION
gbfnew
file
fname
hdrid
jobdes
wrdfrm
_ate
dates
status
internal id
input file name
input header id
input, header tlescription
nQmber of bytes per frame
calendar base date- yr, mo, day, hr, min
seconds of base date
status flag
general new gbf create function
gbfwrt
genera] Write
TRW Houston System Serw{ces - 1 -(printed 12/18/86)

gbfio.c(3) (Gbfile) gbfio.c(3)
gbfopn
general open
gbfcis
general close
gPfdfcclose function for use with aownlist processor to close files
anO Olsp]ay header anO return begin/end times
then reope_
gbfoDs
open the file name for output display in place of stderr used if
the function gbf_fc above
accessing
TRW Houston System Services - 2 - (printed 12/18/86)

OR'_GINAL P,_,G-_ IS
OF POOR QUALITY
gbhead.c(3) (Gbfi]e) gbhead.c(3)
NAME
FileBaseTime, newGBF, gD_off, gbwhead,
heaOer operations
SYNOPSIS
gbrhead gbfi]e structure and
CALTIME FileBaseTime;
GBFILE _newGBF(name,size,tbyte,tbase,story,format)
int size,tbyte;
CALTIME *tbase;
char *name,*story,*format;
gbtoff(gbf)
GBFILE -gbf;
gbwhead(g_f)
GBFILEPTR gbf;
gbrhead[gof)
GBFILEPTR gDf;
DESCRIPTION
newGBF
forms new QDstruct_Jrear_8 sets input fields, Returns nu]7 pointe* isencounted
e_roP
gbtoff
set time offset for gbfile If re÷erence basetime is not set, it is setfile oasetime ant the time offset i5 null
tc
gbwhea_
writes neaOe_ _R_ormat_oR _toPed im current bu{fer t,? ÷_ ;e recorC
gbrhead
reads header recoro
TRW Houston System Services 1 - (printed 12/18/86)

gbio.c(3) (Gbfile) gbio.c(3)
NAME
gbpos, goread, gDwrite, gbdread, gbdwrite -
SYNOPSIS
i/o of gbfiles
gomos(gbf.rec]
GBFILE _gbf;
unsigned rec;
char _gb,'ead(gbf)
GBFILE _gbf;
int gowriteLgbf,data)
GBFILE -gbf;
char *data;
char *godread(gbf,rec)
GBFILE _gbf:
unslgne¢ Pec;
int gbdw_ite(gbf,rec.data)
GBFILE _gbf;
unE_gne_ rec:
Cha_ *oa_a;
DESCRImTION
gbpos
positions file pointer to desired record of referenced gbfile
goread
reaQs current recor_ of referenced gbfile and returns pointer, to _ata in
record. Pointer s_oul_ be recast by caller to desire_ record type. Errors
r'esu_: lrL lnval3o pointer value (0)
gbwrite
writes to current record of referenced gbfile returm_ng the number of the
bytes w*ittem. Note that the file is posec at the next record, errors
result in negative re_urn values.
gbdread
reaOs desired record of referenced gbfile an_ returns pointer to _ata in
record, pointer should be recast by caller to desired PeocrO type. errors
result in invalid pointer value (0)
gbdwrite
like gbwrite but the file is first positioned to the specified record.
TRW Houston System Services 1 - (printed 12/18/86)

gbmake.c(3) (Gbfile) gbmake.c(3)
NAME
makeGBF, makeGBData - gbfile structure allocations
SYNOPSIS
GBFILE _makeGBF(name
char _name;
char _makeGBData(gbf
GBFILE ,gbf;
DESCRIPTION
makeGBF
allocate space for GBFILE structure and set specified fields. Errors
result in null pointer being returned. FielQs are not set if pointers arenull
makeGBDa_a
_liocate space for GBFILE data Puffer. The size of a record is alsocompu_e_. If size is not a multiole of sizeof(lnt), the fields are reset so
tnat rsize = sizeof(in_)_int rsize. Errors result in null pointer beingretur_eG. Fields are not set if pointers are null
TRW Houston System Services - 1 - (printed 12/18/86)

gbopen.c(3) (Gbfile) gbopen.c(3)
NAME
gbclose, freeGBF, gDfree, gbopen, gbnew open, close and free of gbfiles
SYNOPSIS
voiC gbclose(gbf
GBFILEPTR gbf;
void freeGBF(gbf
GBFILEPTR gbf;
void gbfree(gbf)
GBFILEPTR gbf;
GBFILE _gbopen(name,mode)
char _name;
char _mode;
GBFILEmTR gbnewfname,size,tbyte.tDase,story,format,mode)
char _name;
char _mode;
int size;
int t_yte:
c_ar _story,_format;
CALTIME -toase;
DESCRIPTION
gbclose
closes file and updates header _f file ned e write key set
freeGBF
frees all space allocated to gbfstructure. WARNING dipe things may rappen
i _ file was not oDeneO with gbopen since it is assumeo that malloc was used
tc allocate space.
gDfree
closes file and frees all space allocate_ to it. WARNING dire tmings may
nappem if file was not opened with gbopen since it is assumed that ma!loc
was used to allocate space.
gbopen
name file path name
opens file specified by name with designated mode: read only read/write,
or append. File :_ust previously exist or error will result, returns
pointer to file Structure and assigns necessary Space such as buffer space
and space for the file packet. Read/write modes are:
P,R :read only (default)
b,B :read and write
a,A :append
errors return invalid pointer value (0) and are as follows: bad read/write
mode. unable to open file, unable to assign enough buffer space.
note that the file is positioned to the first record (record O) and ttqe
input buffer contains this record. NOTE only the first character of the
mode is considered and the default is read only.
NOTE: mode is type (char ,) not char, a null value (0) selects the
default.
TRW Houston System Services 1 (printed 12/18/86)

gbopen.c(3) (Gbfile) gbopen.c(3)
gbnew
name file path name
size record size in bytes
opens file specified by name with designated mode: read only read/write, or
append, file must oreviously exist or error will result, returns pointer
to file structure an¢ assigns necessary space such as buffer space andspace for the file #acket.
read/write modes are:
b,B =ream and write (_efault)
w,W = write only (causes error with #bclose)
errors return invalid pointer vaiue (O) an_ are as follows: bad read/write
mode, unaole to opem file, unable to assign enough buffer space,note that the file is positioned to the first record (record O) and t_e
input buffer contains this record. NOTE only the first character of the
mode is considered and the default is read/write.
NOTE: if the write on!y option is used, header records are not correoly
updated on closing _ne file. Invokin# gbclose or gbfree to close to willresult in am error.
TRW Houston System Services 2 - (printed 12/18/86)

gbprtd.c(3) (Gbfile) gbprtd.c(3)
NAME
gbfpheaa, fgbprt, gbpnead -
SYNOPSIS
vcid gbfphead(file,gbf)
FILE -file;
GBFILEPTR gbf;
void fgbprt(file,gbf)
GBFILEPTR g_f;
FILE _file;
void gbphead(gbf)
GBFILEPTR gbf;
display of abfile structures
DESCRIPTION
gbfphead
displays curren_ heaaer structure to specifiea f!le
fgbprt
aisplavs current header structure to specifiea file
gbpl_ead
disDI_V£ mesoer tc standaro out
TRW Houston System Services - 1 (printed 12/18/86)

gbtime.c(3) (Gbfile) gbtime.c(3)
NAME
gbtime - gb time
SYNOPSIS
char _gbtime(gbf,time)
GBFILE *gbf;double time;
DESCRIPTION
gbtime
positions file to last time before designated time and return pointer, todata in Puffer. If time before start of file, the first record is selected
(record number O) and if after the end time of the file, the last record is
selected. Errors result in an invalid data data pointer (0). The output
pointer snouio De recast to the data structure type by the calling
function, file search consists of binary search after checking that thetime is within _il_ bounds and an initial estimate of the desired record
record is obained by l_near interpolation
TRW Houston System Services 1 - (printed 12/18/86)

dctprt.b(3) (Gff) dctprt.b(3)
NAME
dctpr%
SYNOPSIS
subroutine dctprt (.lop,frame,out)intege_ ioo (_)
integer frame (_)
integer out
DESCRIPTION
_ctprt
Prints the dictionary from a GFF file.
iop i/o packet (input/output)
frame record buffer (input/output)
out print file unit number (output)
TRW Houston System Services 1 - (printed 12/18/86)

gfcls.b(3) (Gff) gfcls.b(3)
NAMEgfcls
SYNOPSISsubroutine gfclsinteger ioD (*)
integer stooutinteger filout
integer frame (_)
character dscrpt
character prgverinteger status
iop,stdout.filout,frame,_scrpt,prgver,status)
DESCRIPTION
gfcls
Closes a GFF file
iop i/o packet
steout stanQara output unit number
fi]out fi}e output unit number
frame frame buffer
dsorpt upaate oescripzion
prgver program name and version
status i/o status
TRW Houston System Services 1 (printed !2/18/86)

gfdict.b(3) (Gff) gfdict.b(3)
NAME
gfdict
SYNOPSIS
subroutine gfdlct ()op,frame,dict)
integer _op (-)
integer frame (_)character_20 diet (_)
DESCRIPTION
gfdictReturns the dictionary from the GFF file in _ usable form.
iop i/o packet
frame recora buffer (input/output)
diet dictionary (output)
TRW Houston System Services - I - (printed 12/18/86)

gfemsg.b(3) (Gff) gfemsg.b(3)
NAME
gfemsg
SYNOPSIS
subroutine gfemsg (xx,p,stQout,filout)
integer xx
integer p (_)
integer stdout
integer filout
DESCRIPTION
gfemsg
Displays error messages to time output file.
xx error type (inDput)
p i/o packet
stdout stanoard output unit number
filout file output unit number
TRW Houston System Services - 1 - (printed 12/18/86)

gfend.b(3) (Gff) gfend.b(3)
NAME
gfenQ
SYNOPSIS
subroutine gfend (iop.stdout,filout,frame,status)integer lop (*)
integer StdOUtinteger' fi]out
integer frame (_)
integer Status
DESCRIPTION
gfendUpdates the file header, and append the =end frame to the GFF file.
iop i/o packet(input/output)
stoout stanoard out unit number[input)
filou_ print file unit number(input)
frame frame buffer(input)
status 7/0 status{output)
TRW Houston System Services - 1 - (printed 12/18/86)

gffdsp.b(3) (Gff) gffdsp.b(3)
NAMEgffd$_
SYNOPSISsubroutine gff_sp (iop,out,frame._ict)
integer _op (*)
inteoer out
integer frame (*)
character dict (_)
DESCRIPTION
gff_spDisplays file information.
ioo i/o packet
out unit numoer of the output file
frame record Ouffer
Oict dictionary
TRW Houston System Services - 1 - (printed 12/18/86)

gfnew.b(3) (Gff) gfnew.b(3)
NAME
gfnew
SYNOPSIS
subroutine gfnew (1op,stoout,filout,name,unit,type,dscrpt,
prgver,f_ate,fsec,pdate,psec,frmsz,frame.spcblk.dic_,etatus)
integer iop (-)
integer stoout
integer filout
character name
integer unit
character type
character dscrpt
character prgver
integer foate (5)
_oubte precision fsec
integer p_ate (5}
oouble precision psec
integer frmsz
integer frame [frmsz)
integer spoolk (11}
character di:t (frmsz)
integer status
DESCRIPTION
gfnew
Creates _ new GFF file D_' doing the following: 1) Creates the i/c Docket
for GFF in_er-llDrar_, communications. 2) Creates the _ile header ano write
it to the GFF file. 3) Creates the _beg frame anQ write _t to the GFFfile.
iop i,,o packet (input/outpuT)
stdout standard output unit number (input)
filout print file unit number (input)
name file name (input)
unit GFF file unit number (input)
type file type (input)
dscrpt file description (input)
prgver program name and version
fdate file base date - ymdhm (input)
fsec file base date -sec (input)
b_ate program base date - vmdhm (input)
psec program base date -sec (input)
frmsz frame size (input)
frame output record (file output)
spcblk block of information particular to the file type (input)
diet input dictionary (input)
status i/o status (output)
TRW Houston System Services 1 (printed 12/18/86)

gfnew.b(3) (Gff) 9fnew.D(3)
TRW Houston System Services - 2 - (pPinted 12/18/86)

gfopen.b(3) (Gff) gfopen.b(3)
NAME
gfopen
SYNOPSIS
subroutine gfoben (iop,stdout.filout,name,unit,p_ate,psec,rwflg,
frame,s_atus)
integer iop (_)
integer st_out
integer filout
character name
integer unit
integer frame (*)
integer pdate (5)
double precision psec
integer rwflg
integer status
DESCRIPTION
gfopem
Opens an existing GFF file an_ set up tne i/o packet.
i0_
St¢OUt
fi]out
name
uni_
frame
pOa_e
pse:
rwf_g
_/o packet
standard output unit number
orint file Unit number
name of G m= file to ooen
unit mumber on which to open the GFF file
frame buffer.
program base Qate (ymdhm)
brogram base date [sec)
read/write flag
status i/o status
TRW Houston System Services - i - (printed 12/18/86)

gf read. b( 3 ) (Gf f ) gf read. b( 3 )
NAME
gfread
SYNOPSIS
subroutine gfread (iop,stdout,filou_,status,timtag,recnum)integer _op (_)
integer st_out
integer filout
integer status
double precision timtag
integer recnum
DESCRIPTION
gfread
Converts the timetag from brgram base time to file base timethe reoor_ number of the frame.
iop io packet
stdout standard output unit number
filout print file unit number
status OUtDUt status
timtaQ timetag
recnum curremt record number
and returns
TRW Houston System Services 1 - (printed 12/18/86)

gfrhdr.b(3) (Gff) gfrhdr.b(3)
NAME
gfrhOr
SYNOPSIS
subroutine gfrhor (hdr,iop,hdrsz,frame)integer ndrsz
integer nor (nOrsz)
integer iop (*)
integer frame (_)
DESCRIPTION
g{rhdr
Reads the neaOer from the GFF file.
hdrsz number of words in the header (input)
hdr header to de written to the GFF file (output)
iop 1/o packet
frame frame buffer
TRW Houston System Services (printed 12/18/86)

gftime.b(3) (Gff) gftime.b(3)
NAME
gftime
SYNOPSIS
subroutine gftime [iop,stdou_,filouz,time,_naex,status)
integer lop (_)
integer stdout
integer fi]out
doub}e precision time
integer index
integer status
DESCRIPTION
gftime
Returns the index of the first record whose time is less than the time
specified. If the time specified is past the end of file, then the index of
the last frame is returned, tf the time specified is before the beginningof the fi_e, t_en an error is returned.
lop
stdout
filout
time
index
i/o packet
standaro output unit number
print file unit number (output)
time to searcr, for (inPut/output)
in.e× the the record reauested (inout/output)
status error status (output)
TRW Houston System Services - 1 (printed 12/18/86)
gftims.b(3) (Gff) gftims.b(3)
NAME
gftims
SYNOPSIS
subroutine gftims iop,stdout,filout,timei.timeo,index.status)
integer' iop (-)
integer filout
integer stoout
double precision t_mei
double precision timed
integer index
integer status
DESCRIPTION
gftims
Returns the index of the first record whose time is less than the time
specifle_. If the time specified is past the end of file, then the index of
the last frame is returned. If the time specified is before the beginningof the fi}e, then a_ error is returned,
ion
filout
stoout
time!
timed
index
_/o packet
print file unit number
s_an_arO OutDu_ unit numbs _
D_o_raM _]me tc fln_ (inout)
fiie time founa (output)
index the the record requested (_nput/output}
status error status (output)
TRW Houston System Services 1 - (printed 12/18/86)

gfwhOr.b(3) (Gff) gfwhdr.b(3)
NAME
gfwhdr
SYNOPSIS
subroutine gfwhar (ndr,iop,harsz)integer hdrsz
integer hdr [harsz)
integer iop (_)
DESCRIPTION
gfwhdr
Writes the reader, to the GFF file.
hdrsz number Of words in the header [input)
hdn header to be written to the GFF file (output)
iop i/o packet
TRW Houston System Services 1 - (printed 12/18/86)

gfwrit.b(3) (Gff) gfwrit.b(3)
NAME
gfwrit
SYNOPSIS
subroutine gfwrit (iop,stOout,fiiout,sratus,timtag,recnum)
integer iop (_)
integer staout
integer filout
integer status
aouble precision timtag
integer recnum
DESCRIPTION
gfwrit
Converts the timetag from prgram base time to file base timethe recora number of tne frame.
iop io packet
staout stanoard output unit number
filout print file unit number
status ou:But status (output;
tiara# timetag (_nbut/outpu_]
recnum current record numbe _ (output/
and returns
TRW Houston System Services I - (printed 12/18/86)

hdrprt.b(3) (Gff) hdrprt.b(3)
NAME
hdrprt
SYNOPSIS
subroutine hdrprt (1o#,out)
integer iop (*)
integer out
DESCRIPTION
h_rprt
Prints the header record from an GPF file.
iop i/o packet
out output unit number
TRW Houston System Services 1 - (printed 12/18/86)
icshft.b(3) (Gff) icshft.b(3)
NAMEicshft
SYNOPSISsubroutine icshft (n,a,d)integer ninteger e (n)integer _ [n)
DESCRIPTION
icshft
Moves a word from location to another.
character to an integer.
n dimension of a and e (input)
a word to move from (input)
d word to move to (output)
This would typically be _rom a
TRW Houston System Services 1 - (printed 12/18/86)

iopprt.b(3) (Gff) iopprt.b(3)
NAME
iopprt
SYNOPSISsubroutine iopprt
integer out
integer ip (_)
(out,ip)
DESCRIPTION
iopprt
Prints tne i/o pa6ket.
out output unit num_er
ip i/o packet
TRW Houston System Services 1 (printed 12/18/86)

ixatm.b(3) (Input) ixatm.b(3)
NAME
ixatm
SYNOPSIS
Subroutine ixatm
DESCRIPTION
ixatm
Inout of common block xxatm,
TRW Houston System Services I - (printed 12/18/86)

ixbias.b(3) (Input) ixbias.b(3)
NAME
ixbia$
SYNOPSIS
subroutine ixbias
DESCRIPTION
ixbias
Input of common block xxbias.
TRW Houston System Services 1 (printed 12/18/86)

ixcon.b(3) (Input) ixcon.b(3)
NAMEixcon
SYNOPSIS
subroutine ixcon
DESCRIPTION
ixcon
Input o{ common block xxcon.
TRW Houston System Services - 1 - (printed 12/18/86)

ixdata.b(3) (Input) ixaata.b(3)
NAMEixaata
SYNOPSIS
suDpoutine ixdata
DESCRIPTION
ixdata
Input of common block xx_ata.
TRW Houston System Services 1 - (Drinted 12/18/86)

ixdprm.b(3) (Input) ixdprm.b(3)
NAME
ixdprm
SYNOPSIS
subroutine ixdprm
DESCRIPTION
ixdprm
Input of common block xx_prm.
TRW Houston System Services - 1 - (printed 12/18/86)

ixerth.b(3) (Input) ixerth.b(3)
NAME
ixerth
SYNOPSIS
subPouTine ixerth
DESCRIPTION
ixerth
Input of common block xxerth.
TRW Houston System Services - I - (printed 12/18/86)

ixfile.b(3) (Input) ixfile.b(3)
NAME
ixfile
SYNOPSIS
subroutine ixfile
DESCRIPTION
ixfile
Input of common block xxfile.
TRW Houston System Services - 1 - (printed 12/18/86)

ixgnrl.b(3) (Input) ixgnrl.b(3)
NAME
ixgnrl
SYNOPSIS
subPoutine ixgnrl
DESCRIPTION
ixgnrl
Input of common btock data.
TRW Houston System Services - 1 - (printed 12/18/86)

ixgraf.b(3) (Input) ixgraf.b(3)
NAME
ixgraf
SYNOPSIS
subroutine ixgraf
DESCRIPTION
ixgraf
Input of common olock xxgraf.
TRW Houston System Services - I - (printed 12/18/86)

i>'grav.b(3) (Input) i xgrav.t3(3)
NAMEixgrav
SYNOPSIS
subroutlne ixgrav
DESCRIPTION
ixgrav
Input of common block data.
TRW Houston System Services 1 - (printed 12/18/86)

ixinit.b(3) (Input) ixinit.b(3)
NAMEixinit
SYNOPSIS
Subroutine ixinit
DESCRIPTION
ixlnit
Input of common #lock xxinit.
TRW Houston System Services - 1 - (printed 12/18/86)

ixkal.b(3) (Input) ixkal.b(3)
NAME
ixkal
SYNOPSIS
subroutine ixkal
DESCRIPTION
ixkal
Input of common block xxkal.
TRW Houston System Servioes - 1 - (printed 12/18/86)

ixmas.b(3) (Input) ixmas.b(3)
NAME
ixmas
SYNOPSISsubroutine ixmas
DESCRIPTION
ixmas
Input of common block xxmas.
TRW Houston System Services - 1 - (printed 12/18/86)
L

ixmax.b(3) (Input) ixmax.b(3)
NAME
ixmax
SYNOPSIS
subroutine ixmax
DESCRIPTION
ixmax
Input of common block xxmax.
TRW Houston System Services 1 (printed 12/18/86)

ixmisc.b(3) (Input) ixmisc.b(3)
NAMEixmisc
SYNOPSISsuDroutineixmisc
DESCRIPTION
ixmisc
Input of common block xxmisc.
TRW Houston System Services - 1 printed 12/1B/86)

ixmoon.b(3) (Input) ixmoon.b(3)
NAMEixmoon
SYNOPSIS
subroutine ixmoon
DESCRIPTION
ixmoon
Input of common block aata,
TRW Houston System Services I - (printed 12/-18/86)
ixnflz.b(3) (Input) ixnflz.b(3)
NAMEixnflm
SYNOPSISsubroutine ixnflz
DESCRIPTIONixnflz
Input of commonblock xxnflz.
TRWHoustonSystemServices - 1 - (printed 12/18/86)

ixprnt.b(3) (Input) ixprnt.b(3)
NAME
ixprnt
SYNOPSIS
subroutine ixprnt
DESCRIPTION
ixprnt
Input of common biock xxprnt.
TRW Houston System, Services - 1 - (printed 12/18/86)

ixprop.b(3) (Input) ixprop.b(3)
NAMEixprop
SYNOPSISsubroutine ixprop
DESCRIPTION
ixproD
Input of common block xxprop.
TRW Houston System Services 1 - (printed 12/18/86)

ixqcrv.b(3) (Input) ixqcrv.b(3)
NAMEixocrv
SYNOPSISsuDroutineixqorv
DESCRIPTION
ixqcrv
Input of common b]ock xxqcrv.
TRW Houston System Services - 1 - (printed 12/18/86)

ixqgen.b(3) (Input) ixqgen.b(3)
NAMEixqgen
SYNOPSISsubroutine ixqgen
DESCRIPTIONixqgen
Input of commonblock xxqgen,
TRWHoustonSystemServices 1 - (printed 12/18/86)

ixqprm.b(3) (Input) ixqprm.b(3)
NAME
ixqprm
SYNOPSIS
subroutlne ixqDrm
DESCRIPTION
ixqprm
Inou_ of common block xxqprm.
TRW Houston System Services (printed 12/18/86)

ixrpst.b(3 (Input) ixrpst.b(3)
NAME
ixrpst
SYNOPSIS
subroutine ixrpst
DESCRIPTION
ixrpst
input for common block xxrpst.
TRW Houston System Services I - (printed 12/18/86)

ixscov.b(3) (Input) ixscov.b(3)
NAME
Jxscov
SYNOPSIS
subroutine ixscov
DESCRIPTION
ixscov
Input of common block xxscov.
TRW Houston System Services - 1 - (printed 12/18f86)

ixsen.b(3) (Input) ixsen.b(3)
NAMEixsen
SYNOPSIS
subroutine ixsen
DESCRIPTION
ixsen
Input of common block data.
TRW Houston System Services - 1 (printed 12/18/86)

ixsprm.b(3) (Input) ixsprm.b(3)
NAME
ixsprm
SYNOPSIS
subroutine ixsprm
DESCRIPTION
ixsprm
Input of common block xxsprm.
TRW Houston System Services - I - (printed 12/18/86)

ixsptm.b(3) (Input) ixsptm.b(3)
NAME
ixsDtm
SYNOPSIS
subrou$ine ixsDtm
DESCRIPTION
ixsptm
InDut of common block x×sptm.
TRW Houston System Services (printed 12/18/86)
ixsun.b(3) (Input) ixsun.b(3)
NAME
ixsun
SYNOPSIS
subroutine ixsun
DESCRIPTION
i×sun
Input of common block xxsun.
TRW Houston System Services 1 - (printed 12/,18/86)

ixsvbi.b(3) Input) ixsvbi,b(3)
NAME
ixsvbi
SYNOPSIS
subroutine ixsvbi
DESCRIPTION
ixsvoi
Input of common block xxsvbi.
TRW Houston System Services 1 - (printed 12/18/86)

ixtime.b(3) (Input) ixtime.b(3)
NAME
ixtime
SYNOPSIS
subroutine ixtime
DESCRIPTION
ixtime
Input of common block xxtime.
TRW Houston System Services 1 - ,(printed 12/18/86)

ixtoff.P(3) (Input) ixtoff.b(3)
NAME
ixtoff
SYNOPSIS
subroutine ixtoff
DESCRIPTION
ixtoff
Input of common block xxtoff.
TRW Houston System Services 1 - (printed 12/18/86)

ixusys.b(3) (Input) ixusys.b(3)
NAMEixusys
SYNOPSIS
subroutine iXUSyS
DESCRIPTION
ixusys
Input of common block xxusys.
TRW Houston System Services - 1 - (printed 12/18/86)

i×vcx.D(3) (Input) ixvcx.b(3)
NAMEi XVCX
SYNOPSIS
subroutine ixvox
DESCRIPTION
ixvcx
Input of common block xxvcx.
TRW Houston System Services 1 - (printed 12/18/86)

ixvnt.b(3) (Input) ixvnt.D(3)
NAME
ixvnt
SYNOPSIS
subroutine ixvnt
DESCRIPTION
ixvnt
Input of common block xxvnt.
TRW Houston System Services 1 - (printed 12/18/86)

lint.b(3) (Interpolate) lint.b(3)
NAME
lint
SYNOPSIS
subroutine lint (n.x,w,fac,z)
integer
double precision x (I
double p_ecision w
double precision fac 1)
double precision z
DESCRIPTION
lint
Lagrangian interpolation.
n order of the interpolation to De used (input)
x the table of known arguments (input)
w the argument to which the function value
[input)
table of lagrangian factors (input)
the interpoiatea value (output)
fac
z
COMMENTS
is _o be interpolated
ThE taDie Og lagranglan factors must have been initialize: b>& C&_] tc thesubroutine 1 intin.
TRW Houston System Services 1 - (printed 12/18/86)

lintin. D(3) (Interpolate) lintin.b(3)
NAME
lintin
SYNOPSIS
subroutine lintim (n,x,y,fac)
integer n
OouDle precision × (1)
Oouble orecision y (1)Oouble precision fac (t)
DESCRIPTION
l_ntir,
Initializes lagrangian factors for interpolation.
n
x
¥
fac
order of interpolation to be used (input)
table of known arguments of the function corresponding to y {input)
table of known vaiues of t_e function corresponding to x (input)
table of iagrangian factors (output}
TRW Houston System Services - 1 - (printed 12/i8/86)

lrntrp.b(3) (Interpolate) lrntrp.b(3)
NAME
Irntrp
SYNOPSIS
suDroutine ]rntrp (tl,xl,t2,x2,t,x)
aouble pr.eclsion tl
doub]e precision xl (6)
_ouPle precision t2
_ouble precision x2 (6)
double precision t
douDle precision x (6)
DESCRIPTION
lrntrp
LEAR interpolation method for position and velocity.
tl first known time (input),
xl known state at time tl (input).
t2 second knowm tlme [input}.
x2 known state at time t2 (input).
_esired time for in_erpoiation (input).
interpoia_e¢ state for. _lme I (OutDu=).
TRW Houston System Services I - (printed 12/18/86)

qintrp.b(3) (Interpolate) qintrp.b(3)
NAME
qintrp
SYNOPSIS
subroutine Qintrp (tl,ql,t2,q2,t,q)
double precision tl
oouble precision ql (4)doubie precision t2
double precision q2 14)double precision t
aouble orecision q (4}
DESCRIPTION
qintrp
Interpolates a quaternion from two input auaternions.
tl
ql
t2
q2
t
c,
time of attitude 1 (input)
_uaternion fo r interpolation (input)
time of at_i_uae 2 (input)
quaternlo_ for' interpolation (input)
time of desireo attituae I input)
att_tuoe auaterRiop (out#ut)
TRW Houston System Services 1 - (printed 12/18/86)

Qwntrp.b(3) (Interpolate) qwntrp.b(3)
NAME
qwntrp
SYNOPSIS
subroutine qwntrp (t,tl,ql,t2,q2,q,w)
double precision t
double precleiom tl
dOUDie precision q1 (4)
aouble precision t2
double precision Q2 (4)
double precision q (4)
double precision w (3)
DESCRIPTION
qwntrp
Interpolates a quaternion and rate from two _nput Quaternions.
t
tl
ql
t2
q2
w
t_me of desired attitude (input)
time of attitude 1 (input)
quaternior for _nterpolation (input)
time Of a%tituoe 2 [input)
quatern_om for _nterpolatlon (inDue)
a_l_ude oua_er_lon (output)
average angular rate (output)
TRW Houston System Services - 1 - (printed 12/18/86)

relntrp.c(3) (Interpolate) relntrp.c(3)
NAME
rtntrp, lrntrp -
SYNOPSIS
in_erpo]ation methods
ooubte -rtmtrp(t,x,tl.xl,t2,x2)double ±1:double *xl:
double t2;
double _x2;douole t;
double _x;
double -lrntrp(t,x,tl,xl,t2,x2)
double tl:
double *x!;
double t2;
double _x2;double t:
double _x;
DESCRIPTION
rtntrb
LEAR interDotatio_ method for- reiative sta_es
lrntrp
LagPangian ir}_erpo]_tion
TRW Houston System Services 1 (printed 12/18/86)

rlntrp.b(3) (Interpolate) rlntrp.b(3)
NAME
rlntrp
SYNOPSIS
subroutine rlntrp (iop,tm,n,rec,t,f,e0z,stat)
integer iop (_)
aouble precision tm
integer n
integer rec (n)double precision t (n)
double precision f (_)
double precision e (_)
oouble precision z in)
integer star
DESCRIPTION
rlntrp
Lagrang_an interpolation of RELBET GFF Centers n pt eDhem if neccessary
howeve * center routine must be initialized. This may be _one on the lnitlalca]i by setting the last time in the array is less than the 1st it may also
De done b_ a call to rlmidl.
lop _/o package for file (input)
tm deslreO time (input)
number of entries tc De found (input)
rec recorcs corresponaing to entr_es in e input/output)
array of tlme tags for entries
interpolation factors (input/output)
array buffer for entr'les (input/output)
interpolated value (length is same as file data frame length
(output)
star status flag: >=0 1s good, -1 is eof, e is error (output)
TRW Houston System Services 1 - (printed 12/18/86)

rtntrp.b(3) (Interpolate) rtntrp.b(3)
NAME
rtntrp
SYNOPSIS
suDroutine rtntrp (tl,xl,t2,x2,t,x)
double precision tldouble precision xl (12)
double precision t2
double precision x2 (12)
aouble precision %
double precision x (12)
DESCRIPTION
rtntrp
LEAR interpolation methoO for relative states.
tl
xl
t2
x2
t
x
first known _ime (input).
known state at time tl (input
secon_ known time (input).
known state at time t2 (input
desired t_me for interpolation [input).
interpolated state_ for time t (output).
TRW Houston System Services - 1 - (printed 12/18/86)

svntrp.b(3) (Interpolate) svntrp.b(3)
NAME
Svntrp
SYNOPSIS
subroutime svntrp (tl,vl,t2,v2,t,a)
_ouPle precision tl
aouble precision v_ (3)
aouo]e precision t2
oouDle precision v2 (3)
double precision t
douDie precision _ (3)
DESCRIPTION
svntrp
Interpolates acceleration from two sensea velocities.
tl
vl
t2
v2
t
known first time {input).
known first velocity (input).
Known secona time (input).
known secona velocity {input).
aesiPe_ time _nout).
aesire_ aoceler_t_or, toutDu_).
TRW Houston System Services 1 - (printed 12/18/86)

initlinput.¢(3) (Linput) initlinput.¢(3)
NAME
initin, setin, getin -
process
initialize
SYNOPSIS
void initin()
void setin(loc,name,dimtype)
char _]oc;char _name:
char *dimtype;
void getin()
the structure needed by the LINPUT
DESCRIPTIONinitin
initialize maximum memory allocation for INPUT structure array
setin
set the values for the ourren_ INPUT emtry and
positio_
increment _O next e_try
getir,
get the inputs froh tr, e user's stapdara i_ fi_e
TRW Houston System Services - 1 - (printed 12/18/B6)

lex.c(3) (Linput) lex.c(3)
NAME
yylen9, yymorfg, yytchar, yyin, yyout, yyestate, yylex, yyvstop, yycrank,
yysvec, yyto#, yybgin, yymatch, yyextra, yy] ineno, yytext, yylstate, yylso,
yyo!sp, yySbUf, yysptr, yyfn_, yyprevious, yylook, yyback, yyinput,
yyoutput, yyunput
SYNOPSIS
_nt _vleng;
int yymorf9;
lnt yytchar;
FILE *yyin,_yyout;
struoz yysv{ -yyestate;
yylex()
int yyvstop[];
struct yywork yycrank[];
Struct yysv_ yysvec[]:
_truct yvwork -yytoD:
struct yysvf *yybgin;
uchar yymetc_[];
uc_ar yyextra[];
int yyllneno;
Uther yytext[];
struct yySVf -yylstate[],--yylsp,''yyolsp;
uchar yysbuf[];
ucnar *yysptr;
int _yyfnd;
int yyprevious;
yylook()
yyback(p,m)int _D:
yyinput()
yyoutput(c)int c;
yyunDut(c)
int c;
DESCRIPTION
TRW Houston System Services - 1 - (printed 12/18/86)

]ex.c(3) (Linput) lex.c(3)
intend of yylex
yyextraUNISRC_ID@(#)2T.2 8_,/O2/26
yyolspchar yysDuf[YYLMAX]:
cha_-yysptr = yysbuf;
yyinDutthe following are only used in t_e }ex liDrary
TRW Houston System Services 2 - (printed 12/18/86)

linput.c[3) (Linput) linput.c(3)
NAMEnlist, vlist, linput, yyerror, newcell, setq, binop, unop, sum,sub,mult, ai\,, pwr
usuD,
SYNOPSIS
P CELL nlist,viist;
I input(input)
INPUT -input;
int yyerror(s)char ms;
P CELL newcell()
P CELL setqtn,v)
P CELL n,v;
P CELL b_nop(op.a,b)
P FUNCTION op;P CELL a,b;
P CELL unop(op,a)P FUNCTION o#;
P CELL a:
P CELL sum(a,#)
P CELL a,o;
P CELL sub(a,b)
P CELL _,b;
P CELL usub(a)
P CELL a:
P CELL mult(a,b)
P CELL a,b;
P CELL div(a,b)
P CELL a,b;
P CELL per(a,b)
P CELL a,D;
DESCRIPTION
linputL-input linput provides for L-input for other programs. The single input
is an array of type INPUT. INPUT is a structure of the form
{ char _name: char _loc; int dim; char -type}
name is the name as it should appear in the user's input, loc is e pointer
to where the input should be copiea at the eric of the input phase, aim isthe number of items to be stored, and type is the type of the data
(currenty "int", "double", "float .... char" or "string" or "string#").Note that for "string" types, dim is the number of strings, not the length
of the string however, for "string#" types the # is decoded as the lengthof the string and a test is made to verify that the input string is
consitent with the expected length. The final entry in the input array
should have a (char *)0 name.
TRW Houston System Services - 1 - (printed 12/18/86)

1input.c(3) (Linput) linput.c(3)
newcell
The newcell function for lists. Currently newcell simply calls on calloc
when needed, and makes no attempt at reclaiming storage no longer needeC,
setq
assign value tG namelist
binop
D_nary operations
unop
unary operations
sum
sum
sup
difference
USUD
unary minus
mult
multiply
div
diVlOe
!_wr
power
TRW Houston System Services 2 - (printed 12/18/86)

newcell.c(3) (Linput) newcell.c(3)
NAMEnewceil
SYNOPSIS
P CELL newcell()
DESCRIPTION
newcell
allocate sDace
TRW Houston System Services I - (printed 12/18/86)

prt_input.c(3) (Linput) prt_input.c(3)
NAMEprtin - print the contents of the input blocks one variable at a time
SYNOPSIS
void prtln(ioc,name,dimtype)char _loc;char _name;char _dimtype;
DESCRIPTION
prtinprint the contents of the input blocks one variable at a time
TRW Houston System Services 1 - (printed 12/18/86)

lists. C(3) (Lists) lists.c(3
NAME
nil, linit, Cons, inumber, _number, symbol, isatom, isinumber, isdnumDer
issymbo3, isfunction, eq, car, car, ivalue, avaiue, fvalue, svalue, appeno,
member, length, locate
SYNOPSIS
P_CELL nil;
int llnit(cell alloc)P CELL (*cell alloc)();
P CELL cons(a,b)
P CELL a,b;
P_CELL inumbe_(n)
int n;
P CELL anumPer(d)
aouole d;
P CELL symbol(s)C_ar _s:
int isatom[p)
P_CELL p;
in_ isinumber(p)
P CELL p:
int isdnumber(p)
PCELL p;
int issymbo](Q)
PCELL D
int isfunct_on(p
P CELL D
int eq(pl,p2)
P CELL pl,p2;
P_CELL car(p)
PCELL p;
P CELL cdr(p)
P_CELL p;
int ivalue(p)
PCELL p;
double dvalue(p)
P CELL p;
P FUNCTION fvalue(p)
P CELL _:
char *svalue(p)
P CELL p;
P CELL append(x,y)
P_CELL x.y;
int member(x,1)
TRW Houston System Services 1 - (printed 12/18/86)

lists.c(3) (Lists) lists.c(3)
P CELLx,l;
imt length(l)P CELL1;
P_CELLlocate(x,l,m)P_CELLx,l.m;
DESCRIPTIONlimit
initialization
tomstomscell constructor
inumberinteger mumoercell constructor
dnumber
double mumoer cell constructor
symDol
symbol eel] constructor
isatom
preaicate is eel1 atom?
is_numoer
predicate is cell integer?
isdnumber
predicate iE cell _ubie
issymbol_redicate i_ cei_ svmbc!?
is{unction
predicate: is cell function?
eq
predicate: are atoms equal?
car
return car of list
cdr
return cdr of list
ivalue
return ivalue of cell
dvalue
return avalue of cell
fvalue
return fvalue of cell
svalue
return svalue of cell
append
append list to list
TRW Houston System Services - 2 - (printed 12/18/86)

putexp.c(3) (Lists) putexp.c(3)
NAMEbutex;
SYNOPSIS
int putexo(e)P CELLe:
DESCRIPTIONputexp
output exppession_nsymbolic fonm
TRWHoustonSystem Senvices - 1 - (printed 12/18/86)

strsave.c(3) (Lists) strsave.c(3)
NAMEstrsave
SYNOPSIS
char _s_rsave(s)char *s;
DESCRIPTION
strsave
save string s somewhere
TRW Houston System Services 1 (printed 12/18/86)

strstore.c(3) (Lists) strstore.c(3)
NAMEstrstore
SYNOPSIS
cha _ _strstore(t)char *t:
DESCRIPTION
stpstome
store strin_ uniquely in array
TRW Houston System Services 1 - (printed 12/18/86)

acnvrt.b(3) (Math) acnvrt.b(3)
NAMEacnvrt, ai2rl, ai2dbl, arl2i, adbl2i
SYNOPSISsubroutine acnvrt (i,v,ivl,rv!)integer 1integer iv1 (_)reai rvl (i)_oubleprecision v (i)entry ai2rl (i,ivl,rvl
entry ai2dbl (i,ivl,v)
entry arl2i (i,rvl,ivlentry adbl2i (i,v, ivl}
rv1
v
ai2rl
DESCRIPTION
acnvrt
Converts vector arrays of one type to another type.
i dimension inaexes (input)
ivl intege_ vectors (input/output)
teat vector {in#ut/outout}
OOUDle precision vectors (output)
Shifts inteaer vector to reai vector.
a_2oDi
Shifts integer v_ctor _o QO_Die precislor vec_o_ _.
arl2i
Shifts real vector to _nteger vector.
adbl2i
Shifts _ouble precision vector to integer vector.
TRW Houston System Servtces - 1 - (printed 12/18/86)

ang2.b(3) (Math) ang2.b(3)
NAMEang2
SYNOPSISaoubleprecision _unctionang2(x)aoubleDrecision x
DESCRIPTIONang2
Reducesanglesoutside the range-pi to pi into that range.
input angle in radianswhich is to be put into t_e rangeof -pipi.(input)
to
TRWHoustonSystemServices 1 (printed 12/18/86)

arctan.b(3) (Math)
OR,_, .,.......
OF poz;r:_ ,_,,bALiTY
arctan.b(3)
NAME
arctan
SYNOPSIS
double precision function arctan (a,b)
double precisio_ a
double precision b
DESCRIPTION
arctan
Returns zero if botl_ arguments are zero _nd cemPuzes datan2 otherwise.
input argument
b input argument
TRW Houston System Services - 1 (printed 12/18/86)

arshft.b(3) (Math) arshft.b(3
NAME
arshft, vzero, rvzero, ivzero, vshift, ivshft,
i2cnar, i2real, i2dD1, char21, real2i, db121rvshft, ibshft, dbsnft
SYNOPSIS
subroutine arshft (i,v,v2,v3,ivl,iv2,rvl,xv,rv2)
integer i
oouPle precision v (1)double precision v2 (i)
_ouble precision v3 [i)
integer iv! (i)
integer iv2 (i)
real rvl {i)
character_4 xv (i)
real rv2 (i)
entry vzero (i,v)
entry rvzero (i,rvl)
entry ivzero (!,iv1)
entry vshift (i,v,v2)
entry ivshft [i, iv1, iv2)
ewqtry rvshft
entry ios_ft
entry dbshft
entry i2char
entry i2real
i,rvl,rv2)
i, iv!, Iv2]
i,v2,v3)
i,iv1,xv)
i,ivl,rvl)
entry i2dDi (i,iv!,v)
entry char2i (i,xv, ivl)
entry real2i (i,rvl,ivl}
entry db]2i (i,v,ivl)
DESCRIPTIONarshft
Moves data between arrays of different types (no conversion).
i
v
v2
vS
iv1
iv2
rvl
xv
dimension index (input)
vectors (input/output)
_ouble precision vectors (input/output)
double precision vectors (output)
integer vectors (input/output)
integer vectors (input/output)
real vector (input/output)
character array (input/output)
TRW Houston System Services - 1 (printe_ 12/18/86)
arshft.b(3) (Math) arshft.b(3)
rv2 real vector (input/output)
vzero
Zeros the vector.
rvzero
Zeros the Pea] vector.
ivzero
Zeros the integer vector.
vshift
Shifts the double p_eclslor vector v into v2.
ivshft
Shifts t_e integer vector iv1 to iv2.
rvshft
Shifts the real vector rvl into rv2.
iDshft
Shifts an integer arr_> szartin_-a_ i-ast element.
dbshft
Shifts an oouble array starting at last element.
i2char
Shifts integer vector to character.
i2real
Shifts integer vector to real vector.
i2dbl
Shifts integer vector to doubte precision vector.
char2i
Shifts integer vector to character.
real2i
Shifts integer vector to real vector.
dbl2i
Shifts integer vector to double precision vector.
TRW Houston System Services - 2 - (printed 12/18/86)

lsmin.b(3) (Math) lsmin.b(3)
NAME
lsmin
SYNOPSIS
subroutine Ismin (n,a,w,invtol)
integer n
double pPecisio_ a (*)
dOUble precision w (-)
double precision invto]
DESCRIPTION
Ismin
Inverts positive definite
vector.
symmetric matrix s_ored
dimension of matrix (input)
positive definite symetric matrix stored as lower
( i nDut )
inverse of a (output)
invtol toieranoe for singularity (input)
as lower trlangular
triangular array
TRW Houston System Services - 1 (printed 12/18/86)

m2qsub.b(3)
OF POOR QUALITY
(Math) m2qsub.b(3)
NAME
m2qsub
SYNOPSIS
subroutine m2qsub (m,q)
aouble precision m (3,3)
aouble precision q (4)
DESCRIPTION
m2qsub
Converts a rotational matrix to a auaternion.
rotational matrix (input)
quaternion to be generated (output)
TRW Houston System Services 1 (printed 12/18/86)

matrix.o(3) (Math) matrix.c(3)
NAMEmxm,mxmc,mxv,mtxv, mt, mtxm,mxmt-
SYNOPSIS
double *mxm(a,b,c.a]m)
in_ dim:
double _a,_D,*c;
double _mxmc(a,b,c,dim)
int dim;
double _a _D,*C;
double _mxv(y,a,x,dim)
int dim:
double *y *a,*x;
double *mtxv(y,a,x,dim)
int aim;
OOUble _y _a,_x;
double _mt(a,m,dim)
int Oim;
double _mtxm(a,D,c. Oim_
in_ d_m:
double *mxm_(a.b,c,dim)
int dim;
Square matrix operations
DESCRIPTION
mxm
set a : b c, i.e., form matrix product of b and c arc saves _n a. Matrices
are assume¢ to be stored by ROWS not columns.
mxmc
form matrix product of b and cano save3 in a. Matrices are assumed to be
storeO by COLUMNS not rows
mxv
multiply vector x by square matrix a and store at y. (y : a x). Matrices
is assumed to be stored by ROWS not columns.
mtxv
multiply vector x by transpose of square matrix a and store at y. (y : a x
). Matrix is assumed to be stored by ROWS not columns.
mt
gets the transpose of matrix b and stores in matrix a; i.e a : bT
_txm
set a = bT c,i.e., form matrix product of b transpose and c and save in a.
Matrices are assumed to be stored by ROWS not columns.
mxmt
set a : bcT, i.e., form matrix product of b and c transpose and saves in
a. Matrices are assumed to be stored by ROWS not columns.
TRW Houston System Services 1 - (printed 12/18/86)

mx3ops.b(3) (Math)
ORIGINAL p,_,..q_ IS,OF POOR QU,qLITy
mx3ops .b(3)
NAME
mx3ops, mvmu]3, mtxv3, mshft3, mzero3, ident3, smmu]3, mxmul3, mtxm3,mxm_3, mtran3, vadd3, svmul3, vsub3, cros. vnorm3, vunit3, vzero3, root3,
vshft3
SYNOPSIS
subroutine mx3oDs
double precision ml (3,3)double precision m2 (3,3)
oouble precision m3 (3,3)
double precision vl (3)
double precision v2 (3)
double precision v3 (3)
double precision x
entry mvmul3 (ml,vl,v2)
entry mtxv3 (ml,vl,v2)
entry msnft3 (ml,m2)
entry mzero3 (ml)
e_try ioe_t3 (ml)
er_try smmu13 (x,ml,m2
entry mxmu13 (ml.m2.m3_
entry mtxm3 (ml,m2,m3
e_r_ m×mt2 (ml,m2,m3
entry mtran3 (ml,m2)
emmry vaadR (vl,v2,v3
entry svmul3 (x,vl,v2
emtry vsub3 (vl,v2,v3)
entry cros (vl,v2,v3)
entry vnorm3 (vl,x)
entry vunlt3 (vl,v2)
entry vzero3 (vt)
entry vdot3 (vl,v2,x)
entry vshft3 (vl,v2)
DESCRIPTION
mx3ops
Various 3 dimensional matrix and vector operations.
ml double precision matrices (i/o)
m2 double precision matrices (i/o)
m3 double precision matrices (i/o)
TRW Houston System Services 1 (printed 12/18/86)

mx3ops.b(3) (Math) mx3ops.b(3)
v!
v2
v3
x
mvmuI3
double precision vectors (i/o
douPie precision vectors (i,/o
double precision vectors (i/o
scalar (input)
Does vector and matrix multipl ication (V2=MI_V1)
mtxv3
Multiplies vector by transpose of matrix. (V2=transpose(M1)_Vl)
mshft3
Sets one 3x3 matrix equal to another. (M2=M1)
mzero3
Zeroes out a 3x3 matrix. (MI=O)
ident3
Chan#es a square matrix to a identity. (M!=I)
smmuIS
MultiDl_es a scala r my a 3x3 matrix. (M2=x*M1)
mxmul3
Does matrlx multiplication. (M3=MI_M2)
mtxm3
Does matrix mu_tiolication, first
(M3=_ranspose(M1)_M2)
mxmt3
Does matrix mLltiplication, second
(M3=Ml_transpose(M2))
mtran3
Does matrix transpose. (M2=transpose(M1))
vadd3
Does 3-vector addition. (V3=VI+V2)
svmu13
Does scalar and vector multiplication. (V2=×_V1)
vsub3
Does vector subtraction. (V3=Vl-V2)
eros
Computes cross product. (V3=VlxV2)
matrix Is
matrix is
transposed.
transposed.
TRW Houston System Services - 2 - (printed 12/18/86)

mx3ops,b(3) (Math) mx3ops.b(3)
vnorm3
Computes vector magnitude. (x=nor(Vl))
vunit3
Normilizes the vector. (V2=unit(Vl))
vzero3
Zeroes out each com#onent of a vector. (Vl=O]
vdot3
Computes the Qot product of a vector. (c:Vl*V2)
vshft3
Sets one 3-vector equal to another. (V2=Vl)
TRW Houston System Services 3 - (printed 12/18/86)

mxops.b(3) (Math) mxops.b(3)
NAME
mxops, mxmu!, mvmul, mtxv, mxadd, mshift, mTran,
iaent, vada. vsuD, vdot, vnorm, vunit, svmul
mzero. imzero, rmzero,
SYNOPSIS
suaroutine mxops
integer i
integer ]
integer p
real rml (i,j)
integer
double
double
double
double
double
double
aouble
doodle
double
double Drec]s
doubie )recls
entry mxmul
entry mvmul
entry mtxv (
entry mxaaa
en:ry mshif_
entry mtran
entry mzerc
],j,D,rml,iml,ml,m2.m3,m,mt,vl.v2.v3.x,v,mm)
iml (i,j
3recision ml (i,j
3recision m2 (j,p
3recision m_ (i,p
3recislon m (i.j)
3recision mt [j,i
3reclsion vl (j)
3recision v2 (i)
precision v3 (i)
precision x
1on v (i)
ion mm (i,j
i,j,p,ml,m2,m3)
i,i,m!,vl,v2)
,j,m,v2,vl)
_,j,ml,m,mm)
(i,j,m!.m)
i,j,ml,mt)
i,j,ml)
entry imzero (i,j,im!)
entry rmzero (i,j,rml)
entry ident (i,3,ml)
entry vadQ (i,v,v2,v3)
entry vsub (i,v,v2,v3)
enlry vdot (i,v,v2,x)
entry vnorm (i,v,x)
entry vunit i,v,v2)
entry svmul i,x,v,v2)
DESCRIPTION
mxops
Performs various matrix and vector operations.
i dimension index (input)
j dimension index (input)
TRW Houston System Services - 1 - (printed 12/18/86)

mxops.b(3) (Math) mxops.b(3)
P
rml
iml
ml
m2
m3
m
mt
vl
v2
v3
x
v
mm
mxmu I
dimension index (input
real matrix (output)
integer matrix (output
double precision matrices (input)
double precision matrices (input)
m3 double precision matrices (output)
double precision matrices (input/output)
double precision matrices (output)
double precision vectors (input/output)
double precision vectors (input/output)
double precision vectors (output)
scalar (output)
double precision vectors (incur)
double pr'ecision matrices (output)
Performs matrix mulzi#lication.
mvmul
Performs vector, mawr >: multiplication.
mzxv
Performs m_trix caicu _tion.
mxaad
Performs malrix a_dit_on.
mshift
Shifts a matrix.
mtran
Transposes a matrix.
mzero
Zeroes a double precision matr'x.
imzero
Zeroes an integer matrix.
rmzero
Zeroes a real matrix.
ident
Performs matrix identity ooeration.
TRW Houston System Services - 2 - (printed 12/18/86)

mxops.b(3) (Math) mxops.b(3)
vadd
Performs vector addition.
vsub
Performs vector subtraction.
voot
Performs _o_ product.
vnorm
Performs vector normal ization.
vunit
Performs vector unitization.
svmut
Performs vector mu]Tip_catiom by sca_er.
TRW Houston System Services - 3 - (printed 12/18/86

nrm]zq.b(3) (Math) nrm]zq.b(3)
NAME
nrm]zq
SYNOPSIS
subroutine nrmlzq (q)
doubie precision q (4)
DESCRIPTION
nrmlzq
Normalizes i/o quaternion q for rot and mat entry' points.
q quaternion 1o be normalized (input/output)
TRW Houston System Services - 1 (printed 12/18/86)

prtarray.c(3) (Math) prtarray.c(3)
NAMEprt3mat, prt3vec, 3rt3tmat, fprtarray, prtarray
SYNOPSIS
int prt3mat(m,dscp)
aouble _m;
char *dscp;
int prt3vec(\',dscp)double *v;
ct_ar _dscp;
int prt3tmat(m,dscp)
double *m;
chap _Oscp;
int fprtarray(fl,dim,r.ow length,fmt,a)FILE -fl :
int dim,row_lengttq;char _fmt;
double _a;
int Drtarra:/(di_,rov,_length,fmt.a)
int dim.row_length:char -fmm:couple _a:
DESCQIPTION
The Oescr_p_ion field dscp is printed as a string followed my 1 ne_t ine.
prt3mat
d_splay 3 by 3 matrix m to _taout in 21. 14e format
prt3vec
dlsolay 3 vector v to stdout in 21.14e format
prt3tmat
display 3 by 3 transformation matrix m to stdout. A fixed point format
used with the assumption t_at the matrix is normalized,
is
fprtarray
print double precision array of dimension dim to specified file.
row_length specifies the number of elements per line that are to be
printed. If row_length is negative, each row is preceed by a count of the
number of elements that have been thus far printed. A null value of
row_length results in 5 elements per row being printed, fmt specifies a
format with which to print a single element. If fmt is null, then the %159
format is used. Note that format should have a leading tab or spaceseparator.
prtarray
as fprtarray except to standard out <stdout>
TRW Houston System Services - 1 (printed 12/18/86)

q2msuD.b(3) (Math) q2msub.b(3)
NAMEq2msuP
SYNOPSISsubroutine Q2msub (q,qO,m)
double precision q (4)_oubte precision GO
oouble precisio_ m (3,3)
DESCRIPTION
q2msub
Converts a quaternion into a Potat*onal matri×.
quaternion to be conver_,ed (input)
qO positive part of q(1) (input)
rotational matrix to be maae (output)
TRW Houston System Services - 1 - (printed 12/18/86)

qnops.c(3) (Math) qnops.c(3)
NAMEqxq, acxq, qxqc, qintp,qua_ernionoperations
qvrot, qvirot, odor, imatq, matq, normq
SYNOmSIS
aouble _qxq(q3,ql,q2)
OUATERNION qS,_l,q2;
double -qcxq(q3,ql,q2}
OUATERNION q3,ql,q2;
double _qxqc[q3,ql,q2)
OUATERNION q3,ql,q2;
double _qintp(q3,t3,ql,tl,q2,t2)
OUATERNION q3,_1,q2;
doub]e tS,tl,t2:
aouole *qvrot(vout,q,v)Oouble vout[],v[];OUATERNION q;
double _;qv!rot(vOut,q.v}double vout[],v[]:
OUATERNIDN ¢;
double _qdot(oodtoouDle oqdt[];
OUATERNION q;
couple w[];
q,v'}
double _imatq(q,tOUATERNIDN q
ooubie t[)[]
double _matq q,t)
OUATERNIDN qaouble t[][]
double *normq(q)
OUATERNION q;
DESCRIPTION
qxq
forms quaternion product, Sets q3 equal to ql times q2.
qcxq
Sets q3 to ql conjugate times q2.
qxqc
Sets q3 equal to ql times q2 conjugate.
qintp
performs a linear interpolation between ql and q2 defined at
times tl and t2 respectively to get the quaternion q3 defined at t3.
qvrot
Sets vout = qc x v x q; rotates the input vector to the system definedthe quaternion q.
by
TRW Houston System Services 1 - (printed 12/18/86)

qnops.o(3) (Math) qnops.c(3)
qvirot
Sets vout= q x v x qc; rotates the input vector to the system defined bythe quaternion q.
aQot
w anguiar velocity in body coordinates
compute time derivative of quaternion
imatq
Given the inverse of the matrix transformation from F to G, compute the
quaterion of the transformation from F to G. Code converted directly from
the Pascal of the OrDital Flight Simulation Utility Software UnitSpecifications (S. W. Wilson).
matq
call imatq and conjugate the quaternion
normq
call !metq an_ conjugate the _uaternion
TRW Houston System Services - 2 - (printed 12/18/86)

qrot.b(3) (Math) qrot.b(3)
SYNOPSISsubroutineqrot (q,qO,v,x)doubleprecision q (4)doubleprecision qOaou_leprecision v (3)doublebrecision x (3)
DESCRIPTION
qrot
Performs rotations of quaternions.
q quaternion (input)
qO quaternionn (input)
v vector (input)
x vector (output)
TRW Houston System Services - 1 - (printed 12/18/86)
qtnops.b(3) (Math) qtnops.b(3)
NAME
qtnops, qxq, qcxq, qxQO, qtom, qtoim, rot, irot, imatq, matq
SYNOPSIS
subroutine Qtnops
douole precision m (3.3)
double precision q [4)
double precision qO
_ouble precision ql (4)
double precision q2 (41)
double precision q3 (4)
douPle precision v (3)doubte precision x (3)
entry qxq (q!,q2,q3)
entry aoxq (ql,q2,q3)
entry qxqc (ql,q2.q3)
entry qtom (q,m)
entry qtoim (q,m)
entry rot (q,v,x)
entry irot (q,v,x)
entry imat_ im,q)
entry matq (m,q)
DESCRIPTION
qtnoosPerforms various qu_ternion c_er_ions. _Deter_ines an orthogona] m_ri×
re#resem_e_ by a quatern_on. _r,_nsfor.ms the components o= _ vecto _ ilq onecoordinate syste_ to those in another coo_¢inate syste_ rotated with
respect to the first in a way defined by the verso_ q.
m ortnogonal matrix (output)
q quaternion (input)
qO local variable
ql quaternion (input)
q2 quaternion (input)
q3 quaternion (output)
v input vector (input)
x output vector (output)
qxq
Sets q3 equal to ql time q2.
qcxq
Sets q3 to ql conjugate times q2.
qxqc
TRW Houston System Services - 1 - (printed 12/18/86)

qtnops.b(3) (Math) qtnops.b(3)
Sets q3 equa] to qi times q2 conjugate.
Gtom
Converts q to matrix m.
qtoim
Computes matrix of inverse rotation represented by' q.
rot
Uses q to transform v to x.
irot
Uses conjugate of q to transform v to x.
imatQ
Converts matrix m to inverse quaternion q.
matqConverts matrix m to uuaternio_ Q.
COMMENTS
1) The impu_ quaternion must
or_honormai.
D£ normailzeo. 2) Input matrix must be
TRW Houston System Services - 2 - (printed 12/18/86)

rmatrix.c(3) (Math) rmatrix.c(3)
NAME
rmxm, rmxmc, rmxv - double array operations
SYNOPSIS
oouble *rmxm(a,b,c,rowb,colb,colc)
in_ rowb,colb,colc;
double *a,*b,*c;
double ,rmxmc(B,e,c,rowb,oolb,colc)
int rowb,colb,co]c;
dOUble _a.*b,*c;
double _rm×v(y,a,X,_lm)
int dim:
double *y.*a,*x;
DESCRIPTION
rmx_
set a = b c, I.e., form matrix product of b and c and saves in a.
are assumeQ to De Stored by ROWS Dot columns.
Matrtces
_m×mc
form matrix pPoauct of b and c snd,saves in a. Matrices are assumes To De
s_ored b_, CDLOMNS not rows
rmxv
set y = a y, i.e., form product of matrix _ an_ recto - b aDO save
_4atri× is
assumed to be s_ored by ROWS nOt columms.
i r! y.
TRW Houston System Services 1 - (printeO 12/18/86)

sign.c(3) (Math) sign.c(3)
NAME
sign - sign operation
SYNOPSIS
double sign(a,b)
_ouble a,P;
DESCRIPTION
sign
perform sign change operatiom
TRW Houston System Services - 1 - (printed 12/18/86)

symxv.b(3) (Math) symxv.b(3)
NAME
symxv
SYNOPSIS
suoroutine symxv (ds,dx,s,x,y)integer dsinteger dx
Oouble Drecision s (ds)
double precision x (dx)
double precision y (dx)
DESCRIPTION
symxv
Multiplies a symmetric matrix stored lower triangularly by rowsvector.
us dimension of array containing symmetric matrix (input)
Q× dimension of vector (input)
s array containing symmetric matrix: tower triangular portion storedby rows (input)
vector tc be multiplied (input)
times a
oroauct vector (output)
TRW Houston System Services 1 - (printed 12/18/86)

tenrnd.b(3) (Math) tenrnd.b(3)
NAMEtenrnd
SYNOPSISsubroutinetenrnd (place,x)integer piacereal x
DESCRIPTIONtenrnd
Roundsoff values.
place decimalplace in which to round.(input)
x value to round(input/output)COMMENTS
Roundssmall values to zero.
rounds to secon_ digit, etc
TRW Houston System Services - 1 - (printed 12/18/86)

vector.c(3) (Math) vector.c(3)
NAMEvadd, vaddto, vdist, vdot, vfada, vfadato, vsub, vfmui, vrss, vset,vrunit - double array operations
vzero,
SYNOPSIS
double -vadd(a,D,c,dim)
int dim;
double *a,'b,*O;
double _vaddto(a,b,dim)
int d_m;
double _,*b;
double vdist(a,b,dim)
int dim;double _a,*b;
double vdot(a,b,_im)
int dim;
double _a,_b;
doubie -vfadd(_,b,factor,c,dim)
Imt dim;
double _a,_b,-c,factor;
double _vfadato(&,fa¢1o_.b,di _!
int dim:
double *a,*b,factor;
double ,_vsub(a.b,c,dim)
int dim;
double _a,_b,_c;
_oubie _vfmul(&,f&:_or ;D.dim)
double _a,_b,faotor;
double vrss(a,dim}int dim:
double *a;
#ouble _vset(a,b,dim)
int dim;
double _a,*b;
double *vzero(a,dim)
int dim;double _a;
double vrunit[unit,a,b,dim)
int dim;
double *unit,_a,*b:
DESCRIPTION
vada
array addition: set a : b + C
vaddto
add array to array b, i.e. a = a+b.
TRW Houston System Services - 1 - (printed 12/18/86)

vector.c(3) (Math) vector.c(3)
vdist
returns the root sum square cr Euclidean distance between the double arraysa and b
vqot
returns dot product of a and b
vfad¢
set a = b + factormc
vfaddto
multiply array b by factor and add result to array a. i.e. , a = a + f_b.
vsub
set a = _ - C
vfmul
set a : factor*b
vrss
returns root sum square norm of a
vset
set array a equal to b
vzero
set array e equal to 0
vrunit
returns the root sum Square Or Euclidean ois=ante betweem tne double arrays
a and b and stores unit vector from a to b in unit.
TRW Houston System Services 2 - (printed 12/18/86)

an]ists.c(3) (Message) enlists.o(3)
NAME
addANLitem, prtANLitem, prtANList - Adress anO Name lists
SYNOPSIS
int aodANLitem(aaress,name)
char _a_ress,_name;
int prtANLitem(adress,string
char *e_ress,-string;
void prtANList()
DESCRIPTION
addANLitem
Ad_ entry to adress/name list
okay. Returns 0 if list is full
Returns item n_mber (starting at 1) if
prtANLitem
searches adress/name lists and displays name and adress to stdout. Returns
item number [starting at 1) if item founC, C if not. If str_ng is notnull, _hen the string is printed i_ front of the name followed Dv _ Colonand _ Space.
OntANList
a_sDia_ adress/'name lis_ _o stoout
TRW Houston System Services 1 (printed 12/18/86)

datime.b(3) (Message) datime.D(3)
NAME
datime
SYNOPSIS
subroutine datime (unit)
integer unlt
DESCRIPTION
datime
Displays processor name, version, date and time.
uni_ output unit (input)
COMMENTS
Input p_ocessor name must De less than 57 characters.
TRW Houston System Services 1 - (printed 12/18/86)

gnamlist.c(3) (Message) gnamlist.c(3)
NAME
GNLgetName, fprtgnlist, Make_GNLIST, Add_GNList - manipulation ofstructures
namelist
SYNOPSIS
char "GNLgetName(aoress,nlist)
GNL ITEM _nlist;chat *adress;
void fprtgnlist(file,nlist_dsop)FILE *fite;
GNL ITEM *nlist;cha_ *dscp;
GNLIST _Make_GNLIST(list.name,maxlength,items)GNLIST _list;
char. *name,_items;
int maxlength;
int Add GNLlst(adress,ascp,list)char _a_ress,.dsop:
GNLIST _l ist;
DESCRIPTION
GNLgetName
finO entry _n name!ist with given aoress ano return
name pointer is returneO if,entry not founo.tme name. Null (0)
fprtgnlist
display namelist to stdout. List is precee_e_ by aescription Cscp anaconsists of octal adress, name followed by newilne
Nake_GNLIST
initialize and set up a namelist of a_resses an¢ names. Space is altocate_
for the list structure list and the list Duffer items if the pointers are
null. Else the givem space is used. Errors result in a null pointer bein 2returned.
Acd GNList
a_d entry to Namelist.
full, -1 is returned.Returns current number of items in list, If list is
TRW Houston System Services 1 - (printed 12/18/86)

iegrss.b(3) (Message] iegrss.b(3)
NAME
iegrss, gwarn, gerror
SYNOPSIS
subroutine iegrss (p,stdout,filout)
character p
integer stdout
integer fi;out
entry gwarn (p,stdout,filout}
entry gerror (p,staout,filout)
DESCRIPTION
iegrssGwarn aria gerror display warnings and errors ana keep the count of warningsand errors encountered.
message string (input)
StOOUt uni$ for terminal prin_ (input)
filout uni: for print output (input)
gwarn
D_sDlays uarnin_ aria accummu]ates counts.
gerrorDisp]ays error message and accummu]a_es counts.
TRW Houston System Services - 1 - (printed 12/18/86)

ingrss.b(3) (Message) ingrss.b(3)
NAMEingrss, ngrss, awarn, aerror, egrss
SYNOPSIS
subroutine ingrsscharacter p
entry ngrss
entry awarn (p)
entry eerror (p)
entry egrss
DESCRIPTION
ingrss
Cor_ta_ns entry points that provloe for the start and stop of all RELBET
processors. Ingrss is a generic starting point for all routines. Itdisplays the processor name, version, and the current date ana time via a
call to the routine datime. It also reads the first input image thatspecifies the execution mode and the calling processor for the suoordinate
execution mode. Egrss is a generic stopoing point for relbet routines. It
displays a Termination message and schedules the _neexecution of thecalling or ocessor if the execution was in the subordinate mode. Awarn and
aerror disp]ay warnlrlgs and errors ano Keep T_e co_nl of warn!l_gs anderror_ e_counteT_eG.
message string (input)
ngrss
displays name and version tc terminal.
awarn
Dispi_yE warning anQ accummulates counts.
aerr'or
Displays error message and accummulates counts.
egrss
Displays termination messages.
TRW Houston System Services 1 - (printed 12/18/86)

ioschk.b(3) (Message) ioschk.b(3)
NAMEioschk
SYNOPSISsubroutine ioschk (u,ios,s)
integer u
integer iosinteger s
DESCRIPTION
loschk
Checks the i/o status Nora for a fi)e and sets status flag to O=okay,
-l=eof, -It=error. if eof or error is aetected, a message is sent toterminal and print displays.
u unit number.
ios i/o status wora from iostat clause.
OUtDUt status word: O=okay. -l=en_ Of file, -It=error
TRW Houston System Services 1 - (printed 12/18/86)

msgdsp.b(3) (Message) msgdsp.b(3)
NAME
msgdsp, xdsD, xdsp2, starz, newpg
SYNOPSIS
subroutine msgdsp {x,ul,u2)character x
integer- ul
integer u2
entry xdsp (x,ul)
entry xdsp2 (x,ul,u2}
entry starz (ul)
entry newpg (ul)
DESCRIPTION
msgdsp
Displays messages to mDecified units. Xdsp d_sDlay character string tospecified unit. X_sp2 disp]ays c_arac_er string to two units un]ess theyare the same. The string is up to a '$' or to 80 characters if no '$' is
encountered. Starz dlsp]ay asterisos and newog f] lps a page.
x
ul
u2
xdsD
string to aisp]ay (input)
1st disptay unit (incur)
2nd display unit (input)
Dispiays string x to unit u!.
xdsm2
Dis#i_ys s_ring x to u_-_t ui,u2.
star:
Dispiays a line of asteriscs.
newpg
Flips a page in display file.
TRW Houston System Services 1 - (printed 12/18/¢6)

prt_util.c(3) (Message) prt_util.c(3)
NAME
fskip_lines, skip_lines, fprtStars, prtStars -
SYNOPSIS
fskip_lines(fOes lines)FILE _faes;
int lines;
skip lines(lines
int l_nes;
fprtStars(fdes,nl ines)
FILE _fcies ;
int nlines;
prtStars{nlines)int nl_nes:
display utilities
DESCRIPTION
fskiD_i_nesski#s specified number of lines b\, Drint ne_'lines to faes
skip_linessent specified numoe _ of newiimes to stOou=
fprtStars
Prints nl ines og 60 stars followed by _ cr to specified stream
#rtStars
Prints nl ines og 60 stars followed by acr to stdout
TRW Houston System Services - 1 - (printed 12/18/86)

ptrlists,o(3) (Message) ptrlists.c(3)
NAMEaddptr, rmptr, makeplist, freeplist - maintainpointer lists
SYNOPSIS
int addptr(plist.ptr)
PTRLIST *pl ist;char -_tr.;
int rmptr(plist,ptr)
PTRLIST *pl ist:
char *ptr;
PTRLIST *makepl_st(max,list)int max;
char -_1 ist;
void freepiist(ptrlist)
PTRLIST _ptrlist;
DESCRIPTION
Removes arc adds entr_es to pointer 11st. It entr\ not in ! ist memove has
no effect. If entry _n 1 ist tnen ad¢ has no, effect, returns tt_e number of
remaining pointers _r_ the tist unless add would result in tne me;: Oeingexceeded _r wthicr case - I _s returned The end of the Iist is alw_v_ markedmy anu! i pointer and 4= these functions are use¢ to edit the ! _st there
will be no duplication, removes only remove the first occurence from thebeginning of the list and then slide other entries dow._
addp_.P
add ptr to plist ret-urning location of ptr in 1 ist list is searched from
oeginning until null poif-_ter, ol- deslred pointer is TcunC." ",h-= ptr' is addedis _her, e _s ,_oom arid skiD_ec i= _ireaQy there i _ 'mo noo_, thor: the !entr_ o_tr, e l is! is s-t t: tn: max and - i _s Petur'mec
rmptr
remove ptr to plist returning number of 14st elements left list is searched
from beginning until nul] or desired ptr found any remaining 1 ist elements
are then shifted down and the number of pointers remaining is returned
makepl ist
creates a pointer. 1 ist structure and returns a pointer to it. The 1 ist
storage is also allocated and the contents in the input list are stored in.
this 1 ist up to the designated maximum max. If the input 1 ist is a null
pointer then no initialization occurs. The new list structure thus has its
private 1 ist independent of tt_e input 1 ist. Errors result in a null 1 istpointer betng retuPlqed
f reepl ist
f_ees storage for structure Dtrl ist. Di re events may ,happen _f the
st._ucture was not made with maltoc or makepl ist value of 0 is alwaysreturned
TRW Houston System Services 1 (printed 12/18/86)

ratetable.c(3) (Message) ratetable.c(3)
NAME
get_rate_table_value - fetch value from rate table
SYNOPSIS
doubl_ get_rate table_value(time.table)Oouble time;
TIMELINE PTR table;
DESCRIPTION
get_rate_table valuefetch value From rate table.
start of table.
Value is interpolatea even if time is before
TRW Houston System Services 1 - (printed 12/18/86)

stat_msg.c(3) (Message) stat_msg.c(3)
NAMEStat_Msg, Error_Count, Warning Count, StatErrExit, fprtFinish, prtFinish,
err_hocode, err_ooae, berror, bwarn, addefile, rmefile, setMaxErr - statusmessage display utilities
SYNOPSIS
char Stat_Msg[];
int Error_Count;
int Warning_Count:
int StatErrExit;
void fprtFinish(fdesFILE xfdes;
void prtFinlsh(J
vo_ err_hpoode(f)
FILE _f;
VOid err_code(f)FILE _f:
voi¢ oerror(msg.oode
char _msg:int coae;
void bwarn(msg,ooae)
char _msg;
int code;
i_t adaefiie(file_
FILE _file:
int rmefile(file)
FILE -file:
int setMaxErr(err,warn,exfunc)int err,warn;
int (-exfunc)();
DESCRIPTION
Displays error and warning messages to files specified b/ a list ofdisplay files.
status
The message is used as a format in a call to fprintf so that the integercode may be incorporated _n the message. If the let characte_ of the
message is a semicolon ';' then the current system error code and its
description is also written. If the first character is a colon ':' the the
HP code errinfo is written a s well as the system code. In these cases the
initial letter is dropped. Messages are written to a list of files aefault
for which is stderr and stdout however they may be Changed by the functions
addefile and rmefile. A maximum of 3 files may be specified, other onesare ignored.
The function setMaxErr sets the maximum number of errors and warnings that
are issued before a call to a termination routine is made. Null or negativevalues (default) result in no max error count check. The termination
function Exit is specified by the call. A null value results in the
TRW Houston System Services 1 (printed 12/18/86)

stat_msg.c(3) (Message) star_meg.c(3)
routine MaxErrExit being used for the Exit.
fprtFinish
writes final message to specified stream. Message includes error and
warning counts,
prtFinish
writes final message to stderr
err_hpcode
displays HP error coQe errinfo(2) to file
err coae
d_splays system error code to file see errno(2) for aetails. The code and
description are both displayed.
berror
prints message to all the error displays and increments the error count
bwarm
Drints message to a_ 1 the error displays an_ increments the warning count
addefile
add tile to list of a_splay files, returns to%al numoer of _isplay files.-I returnec if file camnot De adde_
rmefile
remove file from display files, returns total mumoer of 01splay fi3es.
setMa×Er_
specifies the max error count and max warning count. The function exfunc
is _nvoked if counts exceeded. The default o{ Exit (exit] _s set if exfunc
is null.
TRW Houston System Services - 2 - (printed 12/18/86)

str_store.c(3) (Message) str store.c(3)
NAME
Save_Str_Buf storing strings
SYNOPSIS
char _Save_Str_Buf()
DESCRIPTION
Save Str Buf
stores contents of S_r_Buf and returns pointer to saved string. Allocatesroom for storage if neccesary.if room cannot be allocatea, then as mucm of
the string as possible is stored. Note that the last character of Str_Buf(at index Str Bur Size) is set to the null character. Thus a maximum of
Str_Buf_Size characters may be stored. The string is stored until a null
character is founa t_us the terminating nuil shoui¢ be included. A nullpointer is returned ie the string cannot be stored.
TRW Houston System Services 1 (printed 12/18/86)

timelines.c(3) (Message) timelines.c(3)
NAME
bsearch timel ine, Isearoh_timeline,fprtTimeLine - timeiine information
isearch timeline, MakeTimeLine,
SYNOPSIS
char _bsearch timel ine(time,timel ine)
double time;
TIMELINE _timeline;
char _lsearch timeline(time.timeline)
double time;
TIMELINE _timeline;
char _isearch timeline{index,timel ine)
int index;
TIMELINE _timeline;
TIMELINE *MakeTimeLine(timeline,table,n_items,time_byte,rec_size)
TIMELINE .-timeline;
char _table;
int n_items.time_byte.rec_size;
void fb_tTimeLine(timeline)
TIMELINE _tlmeiine;
DESCRIPTION
bsearoh tlmeline
performs binary search of time!ire table returning pointer to last entry
with a time less than or equal to the specified time. The current item
member of the timeline structure is set as a sloe effect. If time is
before initial entry, null pointer (0) is returned and the curremt item isset tO -1.
lsearc_ timeline
performs linear search of tlmellne table returning pointer to last entry
with _ time tess than or equal to the sbec!fied time. The search begins at
item indicate_ by Current item member. If this memoer is negative, a
binary search is conducted insteaQ. Error values and side effects are the
same as for bsearch time] ine.
isearch timeline
performs an inspection of timel ine table returning pointer
positioned at the input index from the beginning of the table.
begins at item indicated by the index. If this number is out ofthe table an error value is returned
to entry
The search
range of
MakeTimeLine
Sets up a timeline structure. If either the timel ine or table pointer is
null, them space 1s allocated via malloc and calloc. Th_s these structures
may _e freed. Errors result in null pointer being returned
fprtTimeLine
displays timel ire structure to stdcut
TRW Houston System Services 1 (printed 12/18/86)

tpdsp.b(3) (Message) tpdsp.b(3)
NAME
tpdsp, tOsp, posp, tpstrz, tstrz, pstrz
SYNOPSZS
subroutine tpdsp (msg)
character msg
entry tOsp (msg)
entry pOsp (msg)
entry tpstrz
entry tstrz
entry pstrz
DESCRIPTION
tpOsp
Displays messages to print and terminal units.
msg message string (input/output)
tOsD
Displays message to terminal unit.
pOsp
Dispiay message to nominal print unit out.
tpstrz
Displays string of asteriscs to terminal and print file.
_strz
Displays string Of aster_sos to termina3.
pstrz
Displays string of asteriscs to print file.
TRW Houston System Services 1 - (printed 12/18/86)

mktape,b(3) (Mktape) mktape.b(3)
NAME
mktape
SYNOPSIS
program mktape
DESCRIPTION
mktapeThis program prompts user for inputs required to process an hp9000 created
binary file with mixed type data words. Output is a univac FORTRAN V
readable tape in the same mixed order.
TRW Houston System Services 1 (printed 12/18/86)

unvout.c(3) (Mktape) unvout.c(3)
N&MEUNVOUT,getbits, put?2, putchr -
SYNOPSIS
UNVOUT(rec,fmt,bufout)
int _rec;
int _fmt;
int *Dufout;
getbits(x,p,k)
unsigned x;
in± p,k;
putT2(w,b,bo)
int _bo;
char *w,*b;
putchr(w,buf,pits)imt _bits;
char w,*buf;
routine to bui]d UNIVAC tape file
DESCRIPTION
UNVOU_
Routine to buil_ UNIVAC _e fi_e. _his routine _s m_hir_e _e_en_e_
rec array containing output Qata
fmt array containing output record specificatioms
bufout output Duffer
getb_ts
function to get bits
put72functiom to put 72 bits ir_ output buffer
define as char to e]iminate shift
putc_r
function to put character in output buffer
TRW Houston System Services 1 (printed 12/18/86)

ddna.b(3) (Noisanal dana.b(3)
NAME
dOna
SYNOPSIS
subroutine ddna (x,t,npts,maxord,aan)
double precision x (_)
douole precision t (_)
integer npts
integer maxord
double precision _dn (10)
DESCRIPTION
ddna
Variate divided difference noise analysl S,
x data (input).
t_mes for each datum (input).
npts number of elements in x,t [input).
maxora maximum order of differences to De used (input).
adn variate difference noise values u# to 1Orb order (OU_pUt}.
TRW Houston System Services - 1 - (printed 12/18/86)

ddnois.b(3) (Noisana]) ddnois.b(3)
NAME
ddnois
SYNOPSIS
program d_nois
DESCRIPTION
_nois
Driver for noise ana]ysis using variate divided difference.
TRW Houston System Services 1 - (printed 12/18/86)

nnois.b(3) (Noisanal) nnois.b(3)
NAME
nnois
SYNOPSIS
subroutine nnois (fnam.fnamo,noDs,obaray,obdelt)
DESCRIPTION
nnois
This subroutine fetches t_e user inputs for the common Plocks needed by
this program input file name output file name number of oDservations to
process array of frame ]ds array of time interval lengths w/r to obs type
to process for noise computation
TRW Houston System Services 1 (printed 12/18/86)

dspxq.b(3) (Numdis) dspxq,b(3)
NAME
_spxq. xQdspl, xqdsph, Shoxq
SYNOPSIS
subroutine _spxq (t,is,if,d,stat)
double precision t
integer _s
integer if
double precision d (6)
integer stat
entry x_dspl (star)
entry xqdsph (t)
entry shoxq (t,xpg, if,d,is)
DESCRIPTION
dspxq
Entry points for initialization ano performing xqdsp output.
time tag (input/output)
is scale option: l:lilvvv,2:Inaaaa.3:lvaaww.4=aaawww
l=leng,v=vel.a=ang.n=n.c ,w=ang rate [_nput)
if paramete _ i_dex(i_Dut/OU_DUt)
data buffer(input/output)
star status _lag (output)
x_dspl
Imitial izes compute flags and check for errors.
xqdSph
initializes Oisplay heading for parameter group.
shoxc
Performs output for xQKmpt.
where
TRW Houston System_Services - 1 - (printed 12/18/86)

dxcmp.b(3) (NumOis) dxcmp,b(3)
NAME
dxcmp
SYNOPSIS
block data dxcmp
DESCRIPTION
dxcmp
This block data routine initializes the commom use_ by this program
TRW Houston System Services l - printed 12/18/86)

_xqdsp.b(3) (Numd_s) axQdsp.b(3)
NAME
dxqdsp
SYNOPSIS
block data Qxq_sp
DESCRIPTION
_xqdsp
This block data routine initializes the common used by this program
TRW Houston Systenl:.Services 1 - (printed 12/18/86)

gdisp.b(3) (Numdis gdisp.b(3)
NAME
gdisp
SYNOPSIS
program g_Isp
DESCRIPTION
gdis#
Executive for generic display.
TRW Houston System Services - 1 - (printed 12/18/86)
gdspop.b(3) (Numdis) gdspop.b(3)
NAMEgdspop
SYNOPSISsubroutine gdspop(stat,rec0count,d)integer starinteger recinteger countdouble precision d (0:200)
DESCRIPTION
gdspop
Solicits options for display of files by frames.
stat
mec
count
d
status word (i/o)
record number (input/output)
numDer of frames tc disDlay (input/output)
record data (output)
TRW Houston System Services - 1 - (printed 12/18/86)

gndsp.b(3) (Numdis) gndsp.b(3)
NAMEgnds#
SYNOPSIS
subroutine gn_sp (stat,i_z)
inseger Starinteger i_z (20_
DESCRIPTION
gndsp
Displays selected frames of a stamaard format file.
star status word (i/o)
idz iaz of parameters to display (input/output)
TRW Houston System Services - 1 (printed 12/18/86)

lgint.b(3) (Numdis) lgint.b(3
NAME
Igint, Igfac
SYNOPSIS
subroutine lgint (m,n,td,t,eval,f,z)
integer m
integer n
double precision eval (m,n)
double precislon f (m,n)
double precision t (n)
double precision td
double precision z (m)
entry Igfac (m,n,t,eval,f)
m
n
ev_!
f
t
td
z
lgfac
DESCRIPTION
191nt
iagrangian interpolation (lgint) of n m-vectors.
iengtn of each entry in double words
order of Interpolation(input)
a_ray ni_oint Duffer, (input}
array of i_terpola_on factors (_nput/outPut)
array of time tags for en_ries
desired time (input)
output array (output)
set Up Of factors
set up of factors (Igfac}
COMMENTS
if time tag is within 14 digits of span, the no interpolation output is set
to nearby point. Factors must be precompJted by lgfac or similar routine
TRW Houston System Services 1 (printed 12/18/86)

nxcmp.b(3) (Numdis) nxcmp.b(3)
NAME
nxcmp
SYNOPSIS
subroutine nxcmp
DESCRIPTION
nxcmp
This subroutlne fetohes the user inputs for the
this program
common blocks neeoe_ by
TRW Houston System Services - 1 (printed 12/18/86)

nxqdsp.b(3) (Numdis) nxqdsp.b(3)
NAME
nxqdsp
SYNOPSIS
subroutine nxq_sp
DESCRIPTION
nxqdsp
This Subroutine fetches the user inputs for the common blocks needed bythis program
TRW Houston System Services - 1 - (printed 12/18J86)

xcmpar.b(3) (Numdis) xcmpar.b(3)
NAME
×cmpar
SYNOPSIS
_rogram xcmpar
DESCRIPTION
xcmpar
ariver for comparison of trajectories, output may be 2 trajectories or
relative trajectory
TRW Houston System Services 1 - (printed 12/18/86)

xqdsp.D(3) [Numdis) xqdsp.b(3)
NAME
xadsp
SYNOPSIS
program xq_sp
DESCRIPTION
xqdsp
Driver for _isplay of trajectory and attitude information.
TRW Houston System Servtces 1 - (prtn_ed 12/18/86)

xqkmpt.b(3) (Numdis) xqkmpt.b(3)
NAME
xqkmpt, xqkmpl, xqkmp2
SYNOPSIS
subroutine xqkmpt (t,xl,x2,q.w,stat)
doub]e precision t
double precision xl (6)douo]e precision x2 (6}
doubie precision q (4)double precision w (3)
integer star
entry xaKmpl (stat]
entry xqkmp2 (t,xl,x2,q,w,stat)
t
×1
x2
o
w
star
xqkmp!
DESCRIPTION
xqkmpt
Computes aisplay and p]ot parameters for given time
_me tag (input)
1st vehicle state (input)
2nd venicie state (input)
£ttituoe Qu_ternion (inDu_)
attitude rate (input)
status flag (output)
Init_ai izes compute _lags and check for errors.
in xqCsp.
xqkmp2
Inilia_izes, computes, and displays required parameters.
TRW Houston System Services 1 (printed 12/18/86)

oPcode.b(3) (0bs) obcode.b(3)
NAME
oboode
SYNOPSIS
suProutine obcode (ham, ia,pxclud)cnaracter_4 nam
integer id
integer pxctud
DESCRIPTION
oDcode
Decodes frame id fop oPservation file and checks whether the oPser'vationhas been exc]uOeQ.
nam obs frame id (input)
id data type i0 (output)
pxclud exlcusion flag (output)
TRW Houston System Services 1 (printed 12/18/86)

rtangl.b(3) (Obs) rtangl.b(3)
NAME
rtangl
SYNOPSIS
subroutine rtangl (xtsi,ua,ub,g,gr,gv)
double precision xtsi (6i
double precision ua (3)_ouble precision ub (3)
double precision gdouble precision gr (3)
double precision gv (3)
xtsi
ua
UD
g_
gv
COMMENTS
DESCRIPTION
rtangl
Computes angles and partials for angle observations whose tangent is ratio
of the projection of a range vector onto two sensor axes. Such anglesinclude rendezous radar roll and shaft, and coos and startracker horizontal
and vertical angles, tan(g) = r_ua / r_ub
inertial target relative to sensor position and velocity(input)
first unit axis vector (input)
secono umit axis vector (input)
oDservatiom ang]e (output)
uartla_ of angie with respect tc target posit_on (output)
partial of angle with respect to target velocity (output)
1) Assumes that the partials are _nitialized to zero before the call to
this routine. 2) Assumes that the angle rates have oeen compensated for'
the anguiar motion of the obsePv_n9 vehicle. 3} The axes vectors must be
normalizeo ant nave the correct sense. 4) Thus they are not neccessarilythe unit vectors for the sensor.
TRW Houston System Services - 1 - (printed 12/18/86)

tangle.b(3) (Obs) tangle.b(3)
NAMEtangle
SYNOPSZS
subroutine tangle (xtsi,ua,ub,g,gr)
double precision xtsi (6)
QouD]e precision ua (3)
doubie orecision uD (3)
aouble precision g
double Drecision gr (3)
xtsi
ua
ub
g
gr
COMMENTS
DESCRIPTION
tangle
Computes angles and partials for angle observations whose tar_ent is ratio
of the projection of a range vector onto two sensor axes. Such anglesinclude ren_ezous radar roll and shaft, and coas and startracker horizontaland vertical angies, tan(g) = r_ua / r_uo
inertial target relative to sensor position and velocity input]
first unit axis vector (input)
second unit axis vector (input)
observation angie (output)
DartLa'l o; ang]e witR respect to target position (output
'}, Assumes tlqat the partials are initialized tc zero before *_== cell to
this routine. 2} T_e axes vectors must De normalized and have the correct
sense. 3) Thus _ne_. are not neccessarily the unit vectors for the sensor.
TRW Houston System Services - 1 - (printed 12/18/86)
xcoas.b(3) (Obs) xcoas._(3)
NAME
xcoas, COaSh, coasv, cinit, cDugs
SYNOPSIS
subroutine xooas (g,gr)
Ooub]e precision g
_ouble precision or (3)
entry ccas_ (g,gr)
entry coasv (g,gr)
entry clnit
entry cbugs
DESCRIPTION
xcoas
Computes coas eTlg]e observations and partials.
g angle observation (output)
gr partial of observalion with respect to the target inertial position
[output)
coas_
Comp_tes horlzon_a_ angle anO requireo partials.
coas\'
Com#ute vertical angle and required partials.
cinit
cPugs
Writes oebug information.
TRW Houston System Services (printed 12/18/86)

xra_ar.b(3) (Obs) xradar.b(3)
NAME
xradar, range, ranrat, shaft, sftrat, roll, rolrat, trnion, trnrat,
pohrat
pitch,
SYNOPSIS
suDroutine xra_ar (g,gr,gv)
_ouble precision g
double precision gr (3)
double precision gv (3j
entry range (g,gr)
entry ranrat (g,gr,gv
entry shaft (g,gr)
entry sftrat (g,gr,gv
entry roll (g,gr]
entry rolrat g,gr,gv
entry trnion (g,gr)
entry trnr_t (g,gr,gvl
entry pitctq {g,gr)
entry ponrat (g,gr,gv_
DESCRIPTION
xradar
Computes rendevous radar observations an_ partials,
Computesd observation (ou%Du_ I
gr partial of oDservation with respect to target vehicleposition [output)
gv part_al of observatio_ wit_ respect to target vehicle
velocity (output)
rangeComputes range.
inert i al
_nertial
ranrat
Computes range rate.
shaft
Commutes shaft.
sftrat
Computes shaft rate.
roll
Computes roll.
rolrat
Computes roll rate.
TRW Houston System Services 1 - (printed 12/t8/86)

xradar.b(3) (OOs) xradar.b(3)
trnion
Computes trunnion.
trnrat
Computes trunnion rate.
p_ch
Computes pi_ch.
pcnrat
Computes pitch rate.
COMMENTS
Assumes rates nave been compensated for observing frame angular motion.
TRW Houston System Services - 2 (printed 12/18/86)

xtrack.b(3) (Obs) xtrack.b(3)
NAMExtrack, traokh, trackv, stinit
SYNOPSISsubroutine xtrack (_track,g,gr)integer itrack_ouD_eprecision gdouble precision gr (3)
entry trackh (itraok,g,gr)
entry traokv (itrack,g,Dr)
entry stinit
DESCRIPTION
xtrack
Computes star _racker angle observations anQ partials.
itrack star tracker sensor ld (input)
g angle observation (output)
gr partial of observation wit_ respect to the target inertial position(output)
trackh
Computes hor_zonte! ang)e and reauireO partials.
traokv
Computes vertical a_gie a_d reQuire_ partials.
stinit
initial _zes.
TRW Houston System Services 1 (printed 12/18/86)

ascale.b(3) (Plot) ascale.b(3)
NAME
ascale
SYNOPSIS
Drogram asc_le
DESCRIPTION
ascale
Determines minima and maxima of specified parameters in specified files.
TRW Houston System Services 1 - (printed 12/18/86)

automx.b(3) (Plot) automx.b(3)
NAMEautomx
SYNOPSIS
subroutine automx
DESCRIPTION
automx
Sets minimum and maximum of axes based on parameter min//max.
COMMENTS
Considers only those curves thatape designated.
TRW Houston System'_ervices - 1 - (printed 12/18/86)
dplot.b(3) (Plot) dplot.b(3)
NAME
Oplot
SYNOPSIS
block Oa_a Oplot
DESCRIPTION
_plot
This block data routine initializes the common used by this program
TRW Houston System Services - 1 - (printed 12/18/86)
L_
mmxchk.b(3) (Plot) mmxchk,b(3)
NAME
mmxchk
SYNOPSIS
suDroutine mmxchk (i,ommx,mmx,rchck)
integer i
integer pmmx
real mmx (2)
real rchck
DESCRIPTION
mmxchk
Checks value against min/max.
_epenOing upon input f_ag.
mmmx
mmx
rchck
Value is omitted or set to min/max
delete flag (set to -1 if point deletes else left alone) (output)
min/ma× options for output parameters (input) 2:recomDute,_l=set to
within _nput m_nmax, -l:omit if outside input mlnmax,-3:clip if
outsiOe file minmax, else:set to file minmax last entry specifies
array of minimum and maximum values for output
parameters.(lnpu_/output)
test value for indeDenoent parameter [input/output) note that is ininternal un;ts.
TRW Houston System Services 1 - (printed 12/18/86)

nplot.b(3) (Plot) nplot.b(3)
NAMEnpiot
SYNOPSISsubroutinenplot
DESCRIPTIONnplot
This subroutinefetci_esthe user inputs for thetn_s program
commonblocks neeaed by
TRWHoustonSystemServices (printed 12/18/86)

plotx.b(3) (Plot) plotx.b(3)
NAME
plotx
SYNOPSIS
program plotx
DESCRIPTION
plotx
Main driver for graphlc routines.
TRW Houston System Services - 1 - (printed 12/18/86)

pltnpt.b(3) (Plot) pltn#t.b(3)
NAMEpltnpt, grfnpt
SYNOPSISsubroutineDltnpt
entry grfnpt
DESCRIPTIONpltnDt
obtain general inputs for plot routine and initialize various parameterssuchas labels, titles, axes. curves,timedefault, andparameterid.
grfnptobtain graph specific input
TRWHoustonSystemServices (printed 12/18/86)

q2crvz.b(3) (Piot) q2crvz.b(3)
NAMEq2crvz, a2crv, a2ecrv, o21sto, q21egn
SYNOPSISsubroutine q2crvz (ikurve,l,j)integer ikurveinteger jinteger i
entry Q2crv (ikurve)
entry q2ecrv (ikurve)
entry q21sto (ikurve,i,j)
entry q21egn (i)
DESCRIPTION
a2crvz
Entry points for 2d graphics. Sets up preliminaries for curve plot, finish
drawing curve, store legend information, and display legend.
ikurve curve index (input/output_
j numDer of cal }s for current curve.(lnput)
i current coumt oe how many times curve segment mas been drawr,(:nput]
a2orv
Set_ up preliminaries for curve plot.
q2eorv
Finishes Cra_,,inB curve.
q21sto
Stones legend information.
q21egn
Displays legend.
TRW Houston System Servi'ces 1 (printed 12/18/86)

q2draw.b(3) (Plot) q2araw.b(3)
NAMEq2Oraw
SYNOPSIS
subroutine a2draw (x,nx,imarK,nlbl,ncnt)
real x (1000,2)
integer nxinteger Imark
integer nlbl
integer ncnt
DESCRIPTION
q2draw
Entry points for 20 graphics. Specifies the curves, lines and nlabels.
buffer for values (input)
nx number of points in array (input)
imark mark options for blot curve (input/output)
nlbl label flag for plot curves (input) <0 means label every nth point
starting at I >0 means label every ntn point using file sequenceno.
ncnt current inoe× count &t beginning of curve (input/'outpu%)
TRW Houston System Services 1 - (printed 12/18/86)

q2grph.b(3) (P_ot) q2grph.b(3)
NAME
q2grph, q2fnsh
SYNOPSIS
suDroutine q2grph
entry q2fnsh
DESCRIPTION
q2grph
Entry points for 2d graphics. Specifies the genera] layout for the plot.
Sets an_ specifies the page size, grace area. suDplot area, i3eading, angles
x and y axes, ]aDe]s ...etc. Defines physical set up of Plot.
q2fnsh
Finishes uD a plot.
TRW Houston System Services - 1 - (printed 12/18/86)

qdevin.b(3) (Plot) qaevin.b(3)
NAMEqaevin, Qdevrl
SYNOPSIS
suDroutine qdevin
entry qcievr I
DESCRIPTION
Qdevin
Initializes and releases plot
qdevrlReleases aevise.
device.
TRW Houston System Services 1 - (printed 12/18/86)

qpintx.b(3) (Plot) qpintx,b(3)
NAMEqointx
SYNOPSISsubroutine qpintx (krv,stat)integer krvinteger star
DESCRIPTIONqpintx
initializes andfetches _ata for plotting.krv curve id (input)
stat file io status (input/output)
TRW Houston System Services - 1 - (printed 12/18/86)

qplot.b(3) (Plot) qplot.b(3)
NAME
qplot
SYNOPSIS
subroutine qplot
DESCRIPTION
qplot
Draws & plo$: broken out for segmentation purposes.
TRW Houston System Services 1 (printed 12/18/86)

qDlt2_.b(3) (Plot) qp]t2a.b(3)
NAME
qplt2d
SYNOPSIS
subroutine qplt2a
DESCRIPTION
qDlt2d
Initializes variables such
ana finishes up curves.as stop flag, terminal, curves, plotting array
TRW Houston System Services 1 - (printe_ 12/18/86)

qpxget.D(3) (P]ot) q#xget.b(3)
NAMEq_xget
SYNOPSISsubPout_neqpxget (x,pcont)real x (1000,2)integer Dcont
DESCRIPTION
qpxgetInitializes and fetches data fop p]otting.
x output array (output)
pcont status flag (input/output) o=]ast
nequest,<O eppoP
Pequest done,>O continue with
TRW Houston System SePvices 1 - (pPinted 12/18/86)

qslptn.b(3) (Plot) qslDtn.b(3)
NAME
qslptn, qrlptn
SYNOPSIS
subroutine qs]ptn (dotdsh)
integer dotQsh
entry qrlptn (dotash)
DESCRIPTIQN
qslptn
Entry points to set and reset line patterns,
dotdsn line type (input/output;
qrlptn
Finishes up drawing curve.
TRW Houston System Services - 1 - (printed 12/18/86)

sclset.b(3) (Plot) sclset.b(3)
NAMEsclset
SYNOPSIS
subroutine sclsetreal rmin
real rma×
real step
(rmin,rmax,ste_)
DESCRIPTION
sclset
Adjusts input rmin/rmax value to integralto give approx 10 steps form min to max.
rmin rminimum value (input)
rmax rmaximum value (input)
step step size (output)
steps. The step size is chosen
TRW Houston System Services - 1 - (printed 12/18/86)
a32t36.b(3) (Product) a32t36.b(3)
NAMEa32t36
SYNOPSISsubroutine a32t36(temp,ctemp)integer temp(3)integer ctemp(3)
DESCRIPTIONa32t36
Move 32 bits to 36 bits.
temp input buffer (input)
ctemp temporary buffer(output)
COMMENTS
Must not De compiled with range checking.
TRW Houston System Services - i - (printed 12/18/86)

cmvbit.b(3) (Product) cmvbit.b(3)
NAME
cmvPit
SYNOPSIS
subroutine cmvbit (n, ln, iw,ib,itemp,ow.oD)
integer n
integer in (3)
integer, iw
integer ib
integer itemp (3)
integer ow
integer ob
in
ib
item#
ow
ob
COMMENTS
DESCRIPTION
cmvbit
This is a compound version of getbit, which allows specification of ow and
oh, thus permitting restack of one array into another. This program extract
rl consecutive bits from the array in, beginning w_th the initial word iw
and initial bit ib, and store in the ow,ob portion of tne array 1temp. n
can be any number of b#ts, or 18, 36, or 72 for univac created records
itemp is treated as 32 bit wore for current appl ice, ions.
number of bits (input)
initial array (input_
initi_l worc (input}
initital bits (input)
temporary storage (output)
output worQ (output)
output bits (outDut_
Must not be _omDiied with range checking.
TRW Houston System Services 1 (printed 12/18/86

comptw.b(3) (Product) comptw.b(3)
N&ME
comptw
SYNOPSIS
subroutine comptw (rdata, itype,ktypes,kwor_s,num)real rdata (3)
integer_4 num (50)
integer*4 itype (50)
integer*4 ktypes
integer_4 kwords
DESCRIPTION
comptw
This subroutine computes the data types an_ the
written im eact_ data type.
rda_a Oata
mum numDem of Oata
1type types
ktyDes data types
kwords numDer Of woros
number of wor_s to be
TRW Houston System Services 1 - (printed 12/18/86)

aprod.b(3) (Product) dprod.b(3)
NAMEdproa
SYNOPSISblock data aprod
DESCRIPTION
dprod
This btock data routine initializes tne common used by this program
TRW Houston System Services - 1 - (printed 12/18/86)

axset.b(3) (Product) _xset.b(3)
NAME
axset
SYNOPSIS
subroutine dxset (sog,dx,np)
integer sog (20)character_80x (2OO)
integer np
DESCRIPTION
dxset
Forms dictionary for RELBET special products.
spg parameter group flags (input)
dx dlctionary Duffer (output)
n_ numDer of parameters in output (1+number of parameters)
TRW Houston System Services - 1 - (printed 12/18/86)

getspg.b(3) (Product) getspg.b(3)
NAMEgetspg
SYNOPSISsubroutinegetspg (dlndex,t,xl,x2,q,w,spg,d.count)integer count_ntegerdinaexdoubleprecision tdoubleprecision xl (6)doubleprecision x2 (6)doubleprecision q (4)
double precision w (3)
double precision d (200}
integer spg (20)
DESCRIPTION
getsP9Computes requiree RELBE] product Darameters
count
dinaex
t
xl
x2
q
W
d
spg
COUntflag (output
index for tracking intervals
_ime _ag (inDut)
1st vehicle state input}
2nd vehicle state input)
attitude quaternion (input)
attitude rate (input)
data Duffer (output)
parameter group fiags (input)
input
TRW Houston System Services 1 - (printed 12/18/86)
hptou5.b(3) (Product) hptou5.b(3)
NAME
hptou5
SYNOmSIS
subroutine hptou5 (iop, inrec,maxrec,npar)integer iop
integer lnrec (400)
integer ma×rec
integer npar
DESCRIPTION
hptou5
Writes the header record, dictionary record and data records on to the
tape. Output is a univac FORTRAN V readable tape in the same mixed order.
iop type of calls (input/output) 1 initialization call,open tape
_rive,and write header 2 _ictionary call 3 _ata call 4 wrap up call
inrec inout recor_
maxrec maxlmum record count(output)
npar number of oarameter$ (inbut)
TRW Houston System Services - 1 - (printed 12/18/86)

nprod.b(3) (Product) nprod.b(3)
NAMEnprod
SYNOPSIS
subroutine npro_
DESCRIPTION
nprodThis subroutine fetches the user
this program
inputs for- the common b!ocks neeaeQ by
TRW Houston System Services 1 - (printed 12/18/86)

ntran.c(3) (Product) ntran.c(3)
NAMENTCLOSE,NTEOF,NTFILE.NTOPEN,NTREAD.NTRITE,NTRW,NTRWRL.FORTRANca]lable routines that performvarious tape manipulations
NTBLCK
SYNOPSIS
void NTCLOSE(chanl,status)
int _chanl;
int _status;
void NTEOF(chanl,status)
int *chanl;
int -status;
void NTFILE(chanl,fcount,status)
int -chanl;int -fcount;
int _status;
void NTOPEN(chanl.drive,status)
int _cnanl;int _drlve:
long int -status;
void NTREAD(chani.nobvtes,buffer,sta_us,overf]ow)
int _chan!;
int -nobytes;char *buffer:
long int .status;
long *overflow;
vo i d NTRITE (cnanl , nooytes, buffer, status )int -chanl ;
int -nobytes;chap -buffer;
int -status;
void NTRW(chanl,status)
int _chanl ;
lnt xsta_us;
void NTRWRL(chanl,status)
int _chanl;
int -status;
void NTBLCK(chanl,fcount,status)
int _chanl ;
int *fcount;
int _status;
DESCRIPTION
These functions ape FORTRAN callable routines that perform various tape
manipulations. Tl_e FORTRAN calling sequence for NTCLOSE,NTEOF,NTRW and
NTRWRL is
call NAME(chanl,status)
where all the arguments ape inte#ems. The chanl is the file descriptor
obtained fnom a call to ntopen. If the request is performed successfully,
status returns a zero, othenwise status is positive and contains the system
error number (errno). If an error occurrs, an error message is printed onthe standard error device (stderr or unit 7). The FORTRAN calling
sequences for NTFILE,NTOPEN,NTREAD,NTBLCK,and NTRITE arecall NTFILE(ohanl,fcount,status)
TRW Houston System Services - 1 - (printed 12/18/-86)

ntran.c(3) (Product) ntran.c(3)
call NTOPEN(chanl,drive,status)call NTREAD(chanl,noPytes,buffer,status,overflow)call NTRITE[chanl,nobytes,buffer,status)call NTBLCK(chanl,fcount,status)
For detaii calling argumentsoescription, see individual function below.
Restrictions : maximumof 20 fiie oescriptors maybe openat any one timeinciuding
stdin (unit 5)stdout (unit 6)stderr (unit 7)
NOTE:the functions are designedonly for raw magnetic tape with 7970E tape
drive, files used : /dev/rmtl assumed.but no specific code in thisroutine.
NTCLOSE
tape file close routine.
NTEOF
write an end of file (EOF) mark on the magnetic tape.
NTFILE
position a tape file forward or backward over an end of file marks. The
FORTRAN calling sequence is call ntfile (chanl,fcount.status) where all the
arguments are integers. The number of EOF marks _c pass over is fcount,
where fcount positive implies fcreard, negative imol ies Backward motion.
NTOPEN
FORTRAN callable tame fiie ooem routine for multiple (i.e. two} tame _rivesfiles use¢ : /_ev,/rmtO /dev/rm_1
NTREAD
reams one physical block per col! where
status specifies error fla£ o_ actual count of worms transferred
nobytes specifies number of bytes to transfer;
buffer specifies pointer to user supplied buffer array;over_low specifies the Count of oytes ignored in OhyslCal.
restrictions :
I. fiie must be opene_ by a C coil to open().
2. user supplied Duffer must be a singly subscripted _nteger
a_ray large enougm to contain the largest physcia! blockS. _nvolves possibly macnine oependent code for HP-9OOQ & HP-UX
NTRITE
Write a record to tape. The user supplies the record to be written in the
integer array buffer, the number o = characters (bytes) to transfer in
nobytes, and the file descriptor oPtaine_ from a previous call to ntopen in
than1 The FORTRAN syntax is: call ntrite(chanl,nobytes,buffer,status)
restrictions: The user must supply a large enough buffer for the of bytes
to be transferred. At present, no internal error handling is provided. Forexample, upon encountering the end of tame, some fraction of the buffer is
written to tape. However, the tape is not backspaced to its originalposition.
NTRW
rewind the magnetic
NTRWRL
rewind and release the magnetic tape
NTBLCK
routine to position a tape file forward or backward over n physical blocks.The number of blocks to pass over is foount, where fcount positive implies
forward, negative implies backward motion.
TRW Houston System Services - 2 - (printed 12/18/86)

nxtnd.b(3) (Product) nxtnd.b(3
NAME
nxtnd
SYNOPSIS
suDroutine nxtn_ (t,dt,nstep,ten_,done)
double precision
ooubie precision dt
integer nstep
_ouDle precision tend
integer done
DESCRIPTION
nxtnd
Sets next output time either from a base file (bfopt non-zero) or by
specified time step dt (bfopt=O). Done is set to I if past end time tend,
else set to O. If nstep>O, them edit status is not checked. If bfopt>O,
them base file is position to next uneditea point.
next time (input/output)
dt step size (input)
nsteD step for running off base fite (input_
teno stop time (input)
Clone done fiag {output)
COMMENTS
Base fi_e _a_& must be _ess than 100 words.
TRW Houston System Services I - (printed 12/18/86)

prodx. P(3) (Product) pro_x.b(3)
NAME
prod×
SYNOPSIS
program prodx
DESCRIPTION
pro_x
Executive for RELBET tape proauct output.
TRW Houston System Services 1 - (printed 12/18/86)

sphdr.b(3) (Product) sphdr.b(3)
NAME
sphdr
SYNOPSZS
suDroutine sphar (u,x,r)
_nteger u
character_4 x (26)integer r
DESCRIPTION
sphdr
Displays header and record for RELBET DPF generation.
u display unit (input)
x header message (input/output)
r number of record
TRW Houston System Services 1 (printed 12/18/86)

tblchk.b(3) (Product) tblchk.b(3)
NAME
tblchk
SYNOPSIS
integer function tbichk (i,timtag,onoff)
integer i
oouDle precision timtag
integer onoff
DESCRIPTION
tDlchk
ChecKs _o see if $ime tag is ip tracking inserval.
i inOex (input)
timtag time tag (inPut)
onoff 1 if in tracking intervals (output) =-I not in tracking intervals
TRW Houston System Services 1 - (printed 12/18/86)

udpfmt.b(3) (Product) udpfmt.b(3)
NAME
udp{mt
SYNOPSZS
subroutine u_pfmt (temp,dDnew)
integer temD (3}
integer apnew (S)
DESCRIPTION
udpfmtConverts 64 bi_ HP9000 double precision word to ?2 bi_ UNIVAC.
temp input buffer
dpnew new storage variable (output)
COMMENTS
_ust not be compiieo wi_h range ¢hecK_ng.
TRW Houston System Services 1 - (printed 12/18/86)

uinfmt.b(3) (Product) uinfmt.b(3)
NAME
uinfmt
SYNOPSZS
subroutine uinfmt (input,int}
integer input (2)
integer int (2)
DESCRIPTION
uinfmt
Moves bits.
input input
int output location
COMMENTS
Must not be compiled with range checking,
TRW Houston System Services 1 (printed 12/18/86)

uspfmt.b(3) (Product) uspfmt.b(3)
NAME
uspfmt
SYNOPSIS
subroutine uspfmt [temp,spnew)
integer temp (3)
integer spnew (2)
DESCRIPTION
uspfmt
Converts 32 bit HP9000 single precision to 36 bit UNIVAC.
temp input storage
spnew output storage
COMMENTS
Must not be comDiied with range checking.
TRW Houston System Services 1 - (printed 12/18/86)

amenu.b(3) (Prompts) amenu.b(3)
NAMEamenu
SYNOPSISsubroutineamenu(niaz,xicz,idz)integer n_azcharacterxidz (niaz]integer ioz [niaz)
DESCRIPTION
amenu
Sets flags according to prompt menu.
nidz number of input variables (input)
xidz names of options [input)
i_z on/off flags _I on, -1 off (input/output}
TRW Houston System Services 1 (printed 12/18/86)

aciph.b(3) (Prompts) dciph.b(3)
NAME
dciph
SYNOPSIS
subroutine dciph (prompt,type,nv,iv,rv,av)
character prompt
character type
integer nvinteger iv (_)
real rv (*)
double precision _v (_)
DESCRIPTION
dciph
Read input character
numerical values.string and translates character
prompt display prompt (input)
type data type coOe (input)
nv number of values aes_re_(input
integer value array (inDut)
r"v
CIv oouble #recision value array (input/outout!
string input to
TRW Houston System Services - 1 - (printed 12/18/86)

dciphr.b(3) (Prompts) dciphr.b(3)
NAME
dcipnr
SYNOPSIS
subroutine aciphr (type,lx,xin,nv,iv,rv,dv.erf)
characte_ type
_nteger Ix
character_l xin (.t
integer nv
integer _v (_)
real rv (*)
doubie precision dv (*)
integer err
DESCRIPTION
dciphr
Redes input c_aracter string andnumerical values.
type
Ix
xir,
nv
i v
rv
dv
err
COMMENTS
translates character string input tO
asta type code (input)
length of string (input)
character array (_nput)
number of values desired (input)
integer value array. I input/output)
real value array (input/output)
acuD]e precis]oR value array (_nDut/output)
error/stop flag (output)
Input str_ng is considered to a max of 80 characters.
TRW Houston System Services 1 (printed 12/18/86)

qxmenu.D(3) (Prompts) qxmenu.b(3)
NAME
qxmenu, pmenu, gmenu
SYNOPSIS
subroutine qxmenu (nc,mnunam,np,pnmz,isel,xsel)
integer nccharacter_32 mnunam
integer np
character*8 pnmz (rip)
integer lse)character.:4 xsel
entry pmenu (nc.mnunam,np,pnmz,itei.xse]
entry gmenu (nc,mnunamonp,pnmz,itel.xse]
n_
Dnnlz
_se]
xsel
pmenu
DESCRIPTION
qxmenu
Solicits menu prompt from input list.
n¢ number of letters to check (input)
mnunam name of menu (input)
number of items in menu
names of p_-om_t items (imout}
selected id [output)
f_rs_ four' characters of seiecteo item (output)
Initiel izes count and selectlo_ index, display option menu ann
in_erpre= responsE.
choice ar_d
gmenu
ODteins menu input.
TRW Houston System Services - 1 - (printed 12/18/86)

tic.b(3) (Prompts) tic.b(3)
NAMEtic, ctio, itio, dtio, rtio
SYNOPSIS
subroutine tic (p,l,iv,av,rv.str)
character p
integer 1
integer iv (1)double precision _v (1)
real rv (l)
character str
entry ctio (p.l,str)
entry itio (p,l,iv)
entry dtio (p,l,dv)
entry rtic (p,l,rv)
P
1
IV
dv
rv
str
CtlO
DESCRIPTION
tic
Interactive terminal input/output.
prompt string (input)
number of values or length of string(input)
integer value array (input/output)
douole precision value array(input/output)
real value array (input/output)
string for input/output {lm#ut/outout )
Character entry point for aciph call.
itio
Integer entry point for dciph call.
dtio
Double precision entry point for aciph call.
rtio
Real entry point for dciph call.
TRW Houston System Services I - (printed 12/18/86)

xqwtmz.b(3) (Prompts) xqwtmz.b(3)
NAME
xqwtmz, xqdatz, xqtime
SYNOPSIS
subroutine xqwtmz (p,ymdnm,sec)
characte _ p
integer ymdhm (6)
doubie precision sec
entry xqdatz (p,ymdhm,sec)
entry xqtime (D_sec)
P
ymdmm
se¢
xqdatz
DESCRIPTION
xqwtmz
Interactive input of dates and times.
promp_ string (input�output)
year,month,day,hour minute (input/output)
seconds (input/output)
Obtains s date in year',month,Oay.hou_,m_nute.seconQ.
x_time
Obtains an time via hour,minute,second input.
TRW Houston System Services 1 - (printed 12/18/86)

yesno.b(3) Prompts) yesno.b(3)
NAME
yesno
SYNOPSIS
subroutine yesno [prompt,pyes)
character prompt
integer pyes
DESCRIPTION
yesnoPrompts for a yes or no input.
prompt prompt string(input)
pyes response flag: + = yes -=no (output)
TRW Houston System Services 1 - (printed 12/18/86)

aprop.b(3) (Propagate) dprop.b(3)
NAME
dprop
SYNOPSIS
block data dprop
DESCRIPTION
dprop
This block data routine initializes the common used by this program
TRW Houston System Services 1 - (printed 12/18/86)

Ovdt.b(3) (Propagate) dvdt.b(3)
NAME
Over
SYNOPSIS
subr'out_ne dvOt (t,rv,a)
oouDle precision t
OOUble precision rv (6)
doub)e precision a (3)
t
Pv
COMMENTS
DESCRIPTION
avdt
Computes acceleration for a vehicle.
current time (input)
vehicle position and velocity (input)
acceleration (output)
Vent force and start and stop _lmes must be Oetermine_ by' _river.
TRW Houston System Services 1 - (printed 12/18/86)

nprop.b(3) (Propagate) nprop.b(3)
NAME
nprop
SYNOPSIS
subroutine nprop
DESCRIPTION
nprop
This subroutine fetches the user inputs fop the common blocks neeaed Dythis program
TRW Houston SystemS_rvices 1 (printed 12/18/86)

opnprp,b(3) (Propagate) opnprp.b(3)
NAMEopnprp
SYNOPSISsuDroutlneopnprp(fatals)integer fata!s
DESCRIPTION
driver for opening the files neede_ for propagation
opnprp
fatals fatal error count (output)
COMMENTS
does not Incorporate full error checks
TRW Houston System Services 1 - (printed 12/18/86)

prpnpt.b(3) (Propagate) prpnpt.b(3)
NAMEprpnpt
SYNOPSISsubroutine prpnpt
DESCRIPTIONprpnpt
obtains input for the Dropagation module
TRW Houston System Services - 1 - (prin_,ed 12/18/86)

runkut.b(3) (Propagate) runkut.b(3)
NAMErunkut
SYNOPSISsubroutine runkut (t,dt,x)doubleprecision tdoubleprecision dt_oubleprecision x (6}
DESCRIPTIONPunkut
Uses4th order runge-kutta integrator to ppoDagateposition ant velocityone time step.
initial time (input/output)
dt total time step (input)position and velocity (iflput/output)
TRWHoustonSystem Services (printed 12/18/86)

rvprop.b(3) (Propagate) rvprop.b(3)
NAMErvprop
SYNOPSISsuDroutinervprop (tout,vehi_,trv)
double precision tout
integer venidaouble precision try (7)
DESCRIPTION
rvpropObtains a state vector at desired time by 1) interpolation. 2) runge-kutta
integration of input state. 3) supeP-g integration of input state.
tout required output time (input)
ve_iO vehicle i¢ (input)
try vehicle time, position, ve]oc3ty (_nput/output)
TRW Houston System Services 1 - (printed 12/18/86)

rvup.b(3) Propagate) rvup.b(3)
NAME
rvup
SYNOPSIS
subroutine rvup (c,s,u.ac,dr)
doubie precision c
doubie #recision s (6)oouble precision u (6)
doubie precision ac (3)
_ouble precision _r (3)
DESCRIPTION
rvup
Updates position and velocity
c time factor (input)
s input state array (inPut)
u upoated state array (output)
ac current acceleration (input)
dr save pos_t_om derivative linout)
TRW Houston System Services - 1 - (printed 12/18/86)

supergob(3) (Propagate) superg.D(3)
NAMEsuperg
SYNOPSIS
subroutine superg (nstep,tcur.s)
_ouDle precision hstep
aou_le _recision tour
_ouble precision s (6)
DESCRIPTION
superg
Super G integrator.
hstep current step size (input)
tour old time (output)
s state whose position and velocity are to De aovanceO (output)
TRW Houston System Services 1 - (printed 12/18/86)

tstep.b(3) (Propagate) tstep.b(3)
NAMEtstep
SYNOPSISsubroutinetstep (inc,iv,tend,tc,dt,tnew)
DESCRIPTIONtstep
Obtainsnext time for integratlo_ step.
TRWHoustonSystemServices - I - (printed 12/18/86)

apfmt.b(3) (Oatape) dpfmt.b(3)
NAME
dpfmt
SYNOPSIS
subroutine _pfmt
integer temp (3)
integer aDnew (2)
{temp.dpnew)
DESCRIPTION
Qpfmt
convert 72 bit unvi_c _p.to_64 hp
temp ap Duffer(input)
_pnew hp _p buffer foutput)
TRW Houston System Services 1 - (printed i2/18/86)

getbit.b(3) (0atape) getbit.b(3}
NAMEgetbit
SYNOPSISsubroutinegetb_t (n,in,lw,iP,itemp)integer ibinteger in [3)integer itemp (3)integer iwinteger n
DESCRIPTIONgetbit
extract mconsecutivebits from the array in, beginning with the initialword iw and initial bit ib, andstore in the fi.rst portion of the array
itemp.
records.
ib
in
itemp
iw
m is usually exoected to be 18, 36, or 72 for univac
itemp is treated as 32 bit word for current applications.
initial bit (input/output)
input array
temp buffer (outPut)
in4tia] woro (input/output)
created
oonsecutive bit (inDut/outDut)
TRW Houston System Services 1 (printed 12/18/86)

imove.b(3) (Qatape) imove.b(3)
NAMEimove
SYNOPSIS
subroutine imove (inbut,iwordl,ibitl,len, iout,iword2,ibit2)integer ibitl
integer ibit2
integer inout (-)
integer iwordl
integer iword2
integer len
integer lout {*)
DESCRIPTION
imove
This subroutine moves a field of bits from one position in the input arrayto another position in the output a-ray. The subroutine allows for the
input and output arrays to be the same array, and allows the source fieldto overlap the aestination field, by checking whether the move is to the
left (i.e. lower suoscripts) or to the right, and so starting the move atthe left or right, respectively. The fields may span word boundaries. The
user is Cautioned to i_entify the arrays by their" firs_ subscript, usingthe callimg arguments to define the positions Of interest within the
arrays, as tricker} may mefeat the program design with unpred_ctaOieresults. In common with all refmt utility routines, imove allows the user
to sbeci÷} the word length an_ integer nega£}ve number Conventions desired
for beth i_qDut arc output, whictq _neednot be the same. All internal
calculations are done using HP-9000 integer f32 b:t two's CcmD]ement)
worQs. However, the user may C_oose to reference the input to some other
computer, e.g. Univac 36 bit one's complement. In this way, _he users
orogram Can read Univac data using Univac subscr]pting.
ibitl bit position in inDut(iwordl) for start of move (internal &output,input & updted)
ioit2
input
1word1
Pit positior, i:q iout(iword2) for start of move (internal,input)
array of input data (internal,input)
subscript to input array using wrdlnl length words for startmove (internal,input)
iword2 subscript to output array using wrdln2 length words for
move (internal,input)
len no. of bits remaining to be transferred (internal,input)
iout array of output,data (output,computed)
COMMENTS
of
start of
All calculations of the beginning and ending bit positrons within the
arrays must result in integer numbers. For example using Univac input word
length (36 Pits per word), the max array size is 59,652,323 which defiesthe imagination! TNE USER IS RESPONSIBLE FOR PROTECTING AGAINST SUBSCRIPTS
OUT OF RANGE_! !! Several Fortran intrinsic functions whicn are not part ofANSi For'tram 77 are used by this program.
TRW Houston System Services - I - (printed 12/18/86)

infmt.b(3) (Oatape) infmt.b(3)
NAMEinfmt
SYNOPSISsubroutine infmt (temp,int)integer,temp(2)integer int
DESCRIPTIONinfmt
convert univac integer to _p integer
temp input _ufferint output buffer
TRWHoustonSystem Services 1 (printed 12/18/86)

qatape.b(3) (Oatape) qatape.b(3)
NAMEqatape
SYNOPSISprogram qataoe
DESCRIPTION
qatape
This program reads tne data product (binary) tape created on Univac. It
prints the first and last page if print is set to zero & prints every page
if print is set to 1. It prints every n records if print is set _o 2, This
program also creates a binary disc file(HP format) wren print is set to 3,
TRW Houston System Services 1 (printed 12/18/86)

spfmt.b(3) (Qatape) spfmt.b(3)
NAMEspfmt
SYNOPS!Ssu_rou_ine spfmt (temp,spnew)
integer temo (3)
integer spnew (1)
DESCRIPTION
spfmt
converts 36 bit univac so to 32 nit hp
temp tem_ buffer (input/output)
spnew single precision buffer (output)
TRW Houston System Services - 1 - (printed 12/18/86)

gstack.c(3) (Stacks) gstack.c(3)
NAMEgsPop,gspush,gspeek,gspoke,gsempty,gsfree, make_gstack,q_pop.stack operations
SYNOPSIS
q_push
char _gspop(stack)
P GSTACK stack;
char -gspus_(stack,block)
P_GSTACK stack;char ,olock;
char -gspeek(stack.offset)
P_GSTACK stack;int offset;
char _gspoKe(stacK,b]ock,offsez)
P_GSTACK stack;char _block;
int offset;
char _gsemoty(stack)
P_GSTACK stack:
char _sfree(stack)
P GSTACK stack;
P_GSTACK make gstack(stack,b_size,m block,buffer)P_GSTACK stack;
int D Siz6;
int m_biock;char _Duffer;
cmar -Q poptQueue)
P_OUEUE queue;
char ,__push(queue,btock)
P OUEUE Queue;char *clock;
DESCRIPTION
gspop
Pop the top block of stack. Return pointer found in top 3lock. Return null
pointer if stack is empty. Decrement block count and pc nter to top block.No blocks are moved, in particular top block.
gspush
Push block on top of stack, return pointer to new top, return nullif no room. increment pointer to top block and block count.
gspeek
To read contents of particular block in stack. Offset indicatesin stack,
>=0, displacement from top
< O, displacement from bottom.
Return pointer to start of requested block. Return null pointer if out-of-range.
gspoke
Place contents of block into stack replacing particular stack block.Offset indicates location in stack,
pointer
location
TRW Houston System Services - 1 - (printed 12/18/86)

gstack.c(3) (Stacks) gstack.c(3)
>:0, displacementfrom top< O, displacementfrom bottom.
Returr,null pointer if out-of-range, nonnull otnerwise.gsempty
Emptycontents of stack.Set top of stack to zero.error else return beginof stack
Returnnull pointer if
gsfreeFreealiocation for stack. Return nuil pointer
make_gstackb size block sizemblock maximumnumber Of blocks
buffer. pointer to where stack is to begin Create new stack
beginning at location indicated by buffer, having block
size of b_size, and maximum number of blocks m block,Return null stack pointer whem error. Return pointer to new
stack. If input for pointer to stack is nut! then space is
allocate_ according tc stack slze. IS onput for pointer to
char is null then space is allocated according to m blockanO b size.
q_popPop the front clock of queue. Re_urn pointer mo old front block. Return
null ooinmer if oueue 1s empty. Decrement block count. Ad3ust pointer tofroD_ O]OCK. NC blocks are moved, ir_ particular front block.
q_pusn
Push biook on top of queue, return pointer to new top, return nullif nO room. Increment pointer to tob block ano block count.
pointer
TRW Houston System Services - 2 - (printed 12/18/86)

BaseTime.c(3) (Time) BaseTime.c(3)
NAME
BaseCalTime, dD_BaseTime, GBeginTime, GEndTime,LEndTime, LDelTime - Base and time control
SYNOPSIS
GDelTime, LBeginTime,
CALTIME BaseCalTime;
double dD_BaseTime;
double GBeginTime;
double GEndTime;
double GDelTime;
double LBeginTime;
_oubie LEndTime;
double LDelTime;
DESCRIPTION
These parameters are urovi._ea with tme idea that GBeg_nTime _ GEndTime and
that the nom_na! Begin _nd Enc_ t_mes oafault to these vaiues. They prov_oe
a_aec safe_y in the c2se where BeginT_me and EndTime may De changed _uringexecution.
BaseCalTime
Time from which all t_mes are measured,
Assumed to be UT in Gregoria_ Calemd_r
JD BaseTimeJulian date of BaseCalT_me
GBeginTime
Global start time ir_ seconds from BaseCalTime.
No processing _s consiaered beyona this time
GEndTime
As BeginTime but at end.
GDelTime
Global Time step in seconds
These parameters are provided with the iJea that they specify working timespans. The EndTime _ay be _ess th_n the BeginTime for backwards timeprocessing. They should default to the Global times.
LBeginTimeStart time _n seconds from BaseCalTime.
LEndTime
As BeginTime but specifies end.
TRW Houston System Services - 1 - (printed 12/18/86)

cmpdat.b(3) (Time) cmpdat.b(3)
NAME
cmpdat, cdtojd, jdtoco
SYNOPSIS
subroutine cmpdat (date,djul)
douDie precision date (6)
double precision o]wl
entry cdtojd (date,djul)
entry jdtocd (djul,date)
DESCRIPTION
cmp_atDoes true calculations for: 1 Calendar date to Julian date. 2Gate to Ca]en_ar ¢ate.
Gate the calendar date- yr mo, day, rip, min, sec (input/output
djul julian Gate (assumed at noon) (input/output)
cdtojo
Converts a given ca!enOeP mate to its oorrespondin# Julian mate.
Julian
jdtocdConverts double
minute,seconds.Drecision 3ui_an date tc year,month,day,hour.
COMMENTS
Date must be before year 2000 and after 1984.
TRW Houston System Services 1 - (printed 12/18/86)

_ays.b(3) (Time) days.b(3)
NAMEOays
SYNOmSISsubroutine days (dv!,dv2,d)integer dvl (3)integer dv2 (3)integer d
DESCRIPTIONOays
Computesthe numberof naysbetweentwo calendardates.dvl date vector (y.m,d) for first date
dv2 date vector (y,m,d) for seconddate
numbero÷d_ysOiEferencebetweendatesCOMMENTS
1.2.
Algorithm worksfor years after 1582.
ZmDiementatiommssumesthzt yearsbetween0 an_ 200 ape relative,/ear 1900.
to
TRW Houston System. Servtees 1 (printed 12/18/86)
daysxx.b(3) (Time) daysxx.b(3)
NAME
dBysxx
SYNOPSIS
function daysxx (y,m)
integer y
_nteger m
DESCRIPTION
daysxxComputes leap-year correction to days.
y input year
m input month
TRW Houston System Services 1 - (printed 12/18/86)

dhms.b(3) (Time) dmms.b(3)
NAME
dhms
SYNOPSIS
subroutine dnms (t,dhm,sec)
doub]e precision t
integer dhm (3)
red] sec
t
dhm
sec
COMMENTS
DESCRIPTION
dhms
Converts a t_me in seconds to days, hours, minutes, seconds.
time tag (input)
days, hours, and minutes (output)
seconds (output)
Time tag must be in seconds.
TRW Houston System Services 1 - (printed 12/18/86)

hms2ds.b(3) (Time) hms2ds.b(3)
NAME
hms2ds
SYNOPSIS
subroutine hms2as (itime,te)
_nteger itime (3)
double p_eclsior_ te
DESCRIPTION
hms2ds
Converts hours minutes and seconds to double precision seconds.
1time integer hours, minutes, seconds (input)
te douPle precision seconds (output)
TRW Houston System Services - 1 - (printed 12/18/86)

j2c.b(3) (Time) j2c.b(3)
NAME
j2c
SYNOPSIS
subroutine j2c (t,jb,tv,sec)
double precision t
integer j_
integer t\' (5)
re&] sec
DESCRIPTION
j2c
Takes juiian base plus offset in seconds and gives
year,month,day,hour,min and real seconds.
lnDut time in seconds relative to base date
j_ Oase julian day' (input)
_v integer time vector. (y:m:d:h:m) input
sec Pea] seconds {output)
back integer
TRW Houston System Services - 1 - (printed 12/18/86)

j2ymd.b(3) (Time) j2ymd.b(3)
NAME
j2ymd
SYNOPSIS
subroutine j2ymd (jd,ymd)
integer jO
integer ymd (3)
DESCRIPTION
]2yma
Computes calendar year month day from universal
jd julian oate (input)
ymd year month day vector (output)
Julian date.
TRW Houston System Services 1 - (printed 12/18/86)

secnds.b(3) (Time) secnds.b(3)
NAME
secnds
SYNOPSIS
subroutine secn_s (datel,aate2,secs)
double precision datel (6)
double precision date2 (6)
double #recision sees
DESCRIPTION
secnds
Determines the difference in seconds betweetq two calendar times.
date1 1st date as double words (input)
date2 2nd date as double words (input)
secs seconds betweem the two dates (output)
TRW Houston System Services 1 - (printed i2/18/86)

systime.c(3) (Time) systime.c(3)
NAME
CurSysTime, GMTsec. GMTday, GetCurTime, fprtCurTime, prtCumTimetime
system
SYNOPSIS
CALTIME CurSysTime;
long GMTsec;
int GMTday:
CALTIME *GetCurTime()
void fprtCurTime(file)
FILE *file;
vole prtCurTime()
DESCRIPTION
Module fo_ ootaining current time as witnessed by system. The variables
CurSysTime, GMTsec, and GMTaay _esDectiveiy co_teln tiqe system GMT date.secons since 1970 and days since 1970. Tnese variables are set upon
calling the the 9unctlo_ GetCurTime. They are not uDaate_ otherwise an¢may accord_nal_ De ssale. Note _n par_outar that fortCurTime merely #Pints
what _s in CurSysTlme and aces no= uDaa&e the value.
GetCurTime
Sets external variable to curent GMT
pointer to the variable CurSysTimeas witnessed by system. Returns
fprtCurTime
Displa_ current system time in ful _ format. See fprtctime for details.
prtCurT1me
Display current system time in full format to stdout,
TRW Houston System Services 1 (printed 12/18/86)

timedate.c(3) (Time) timedate.c(3)
NAMEhms2sec, sec2hms,Std time, mnthnum-
dayslbc, days, etsec, jul2cal,
time format conversions
SYNOPSIS
double _ms2sec(hms)
HMSTIME _hms;
HMSTIME _sec2hms(nms,sec)
HMSTIME _hms;
double sac;
dayslbc{date)
CALDATE _date;
days(date,base)CALDATE *date,*base;
double etsec(to,from)
CALTI_E =to,=from;
doub!e ]ul2cal(]date,date)
aouble jdate;CALDATE _date;
aouDle jut_ate(date)CALDATE _oate;
double jultime(c)
CALTIME _c:
std time(time)CAL_IME =time:
mntnnum(month)
char _month;
]uldate, jultime,
DESCRIPTION
hms2sec
Return seconds specified by hms structure
sec2hms
Convert seconds to hour minute second format.
HMSTIME structure. Note no space is allocated.
Returns the pointer to
dayslbcNumber of days from OjanlBC using the Gregorian calendar. %CDates arevalid from 150ct1582 in Catholic countries [previous ,day was 40ctl5B2 in
old style) and from 14Sep1752 in Britis_ countries (US incluaed) (previous
day was 2Sep1752 O_d style)
daysNumber of days from base date to date Dates must be in Gregorian
calendar. Note that oay of week field is set in this computation.
etse¢
Returns elapsed time in seconds from CALTIME from to CALTIME to.
jul2cal
Converts input dulian date to calendar date, returning the number offractional hours left in the julian time. Note that whole julian dates
TRW Houston System Services 1 - (printed 12/18/86)

timedate.c(3) (Time) timedate.c(3)
occurat noonandcalendar dates are Gregorian.
juldateReturnsju]ian date in days. Date is assumeoto correspond to miOnightthus result is ju]ian date of midnight. Methodis to dadjulian date ofOjanlBCto numberof elapseOdays.
jultlmeReturnsjulian time in bays from calendar time. Note the time oortiom isincludedso that the time tag doesnot alwaysenowith a .5.
std timeE_sures_imeis in normalizedformat, ie, right month,Oar etc.the dayof the weekfieio is set in this normalization.
Note that
mnthnum
Returns number of month baseO on deciphering the characters in month.
Differences between upper anO lower case are ignored. Characters are
checkeO until a match is found , e.g jun or aP are june and april. If nomatch then 0 is returned
TRW Houston System Services 2 - (printed 12/18/86)

timemake.c(3) (Time) timemake.o(3)
NAME
makeT_me, makeHMS, makeDate setDate, setHMS, setTime -time structures
SYNOPSIS
CALTIME *makeTime(n)
int n;
HMSTIME _makeHMS(n)int n:
CALDATE _makeDate(n)
int n;
setDate(date,year,mont_,day
CALDATE -date;
int year,month,_ay:
setHMS(hms,hour.min,sec}
HMSTIME _hms;
int hour,min;double sec;
setTlme(t_me.vear,montn,_av.hour.mln.sec)C_LTIME ,_time:
ir_t year,month,aay:in_ _ou_.m_n;
double sec;
Allocate and set
DESCRIPTION
Create and
aiiocat_on
r,e_urned when errors are encou_tere¢.
makeTime
&!locates space for specif]eO number of CALTIME stpuctures.pointer to a C_LTIME structure.
makeHMS
Allocates space for specified number of HMSTIME structures.pointer to initial HMSTIME structure.
makeDate
Allocates space for specified number of CALDATE structures.
pointer to initial CALDATE structure.
setDate
Set Cate structure to specified values.
setHMS
Set HMSTIME structure to specific values
setTime
Set time structure to specified values.set.
initialize time structures, ca!leo is used for storagewhence structures Ria_ be fPeeo v;i:P; free. N_ll pointers are
Returns
Returns
Returns
Note that day of week is not set.
Note that day of week field is not
TRW Houston System Services 1 - (printed 12/18/86)

timeprint.c(3) (Time) timeprint.c(3)
NAME
fprtdate, sprtdate, prtdate, fprthms,
sprtctime, prtotime, fprtsec, sprtsec,information
sprthms, prthms, fprtct_me,preset - display formatted time
SYNOPSIS
void fpntdate(file,eate)FILE *file;
CALDATE *date;
void sprtdate(s,date)
char *s;
CALDATE *date;
void prtaate(date}
CALDATE *date;
void fprthms(fiie,hms)FILE _file;
HMSTIME *hms;
void sorthms{s.hms)
char *_;
HMSTIME -hms;
voio pmtnmslhms)HMSTIME _nms:
void fprtctime(file,time)FILE _file:
CALTIME _time;
void sprtctime(s,time)
char -s;CALTIME *tlme;
void prtctime(time)
CALTIME *time;
void fprtsec(file,sec)FILE *file;
double sec;
void sprtsecls,sec)
char *s;double sec;
void prtsec(seo)
double sec;
DESCRIPTION
No_e that the file print routines do not add newl ires nor do they flush tneprint buffers. The displays to stdout out do however.
fprtdate
Formatted print of date to file in Dayofweek Momthday, month year format.
sprtdate
Formatted print of date to file in Dayofweek Monthday, month year format.
TRW Houston System Services 1 - (printed 12/18/86)

timeprint.c(3) (Time) timeprint.c(3)
prtdateFormattedprint of date to stdout
fprthmsFormattedprint of hmsto file in hr:min:sec format.
sprthms
Formatted print of hms to string _n nr:mim:sec format.
prtnme
Formatted print of hms to st_out in hr:min:sec format
fprtctime
Formatted print of calendar time to specified file.
sprtctime
Formatted print of calendar time to specified string.
prtctime
Formatted print of calendar time to stQout
fprtsec
Formatted print of _ms to file in hr:min:sec format.
sprtsec
Formatted print of nms to strin# im hr:mim:eec format
Drtsec
Formatted print of rims to stdout _n hr:mi_:sec format
TRW Houston System Services 2 - (printed 12/18/86)

ymd2j.b(3) (Time) ymd2j.b(3)
NAMEymd2j
SYNOPSISsubroutineymd2j(ymd,jd)integer ymd(3)integer ja
DESCRIPTIONymd2j
Computesdulian universal date given calendar year,month,day.yma c_tenQar year month _ay (input) year is either calendar
calendar year- mod 1900
ja julian date (outDut)
year or
TRW Houston System Services 1 - (printed 12/18/86)






![Selection presentation ii_(final)[1]](https://static.fdocuments.us/doc/165x107/55822597d8b42a48108b4a77/selection-presentation-iifinal1.jpg)











