
IGARSS 2011_AHMED GABER.ppt
29
ASSESSING THE POTENTIAL OF GROUNDWATER ASSESSING THE POTENTIAL OF GROUNDWATER RESOURCES WEST OF ASWAN, EGYPT, USING RESOURCES WEST OF ASWAN, EGYPT, USING ALOS/PALSAR POLARIMETRIC INFORMATION ALOS/PALSAR POLARIMETRIC INFORMATION Ahmed Gaber ( Ahmed Gaber ( ر ب ا د ج م ح أ ر ب ا د ج م ح أ) ) *, Magaly Koch **, Motoyuki Sato * *, Magaly Koch **, Motoyuki Sato * * Center for Northeast Asian Studies, Tohoku University, Sendai, Japan **Center for Remote Sensing, Boston University, Boston, MA, USA IGARSS 2011, 24-29 July, Vancouver, Canada [email protected]
Transcript of IGARSS 2011_AHMED GABER.ppt

ASSESSING THE POTENTIAL OF GROUNDWATER RESOURCES WEST ASSESSING THE POTENTIAL OF GROUNDWATER RESOURCES WEST
OF ASWAN, EGYPT, USING ALOS/PALSAR POLARIMETRIC OF ASWAN, EGYPT, USING ALOS/PALSAR POLARIMETRIC
INFORMATIONINFORMATION
Ahmed Gaber (Ahmed Gaber ( جابر جابر أحمد * Magaly Koch **, Motoyuki Sato **, Magaly Koch **, Motoyuki Sato ,*((أحمد* Center for Northeast Asian Studies, Tohoku University, Sendai, Japan
**Center for Remote Sensing, Boston University, Boston, MA, USA
IGARSS 2011, 24-29 July, Vancouver, Canada

Talk Outline
Research Background
Radar Polarization Transformation of ALOS/PALSAR
Radar Polarization Filtering
Preliminary results
Field Validation
Conclusion
2IGARSS 2011, 24-29 July, Vancouver, Canada

© Freeman et. al., 2007
Radar Penetration Capability in the Desert Areas
Research Background
3IGARSS 2011, 24-29 July, Vancouver, Canada

IGARSS 2011, 24-29 July, Vancouver, Canada
Research Background
© Freeman et. al., 2007
4

The penetration capability is based up on both the observational conditions (sensor)
and the medium characteristics (environmental conditions) , such;
The penetration depth is spatially dependent
Environmental conditionsSurface roughness
Moisture content
Dielectric constant
grain size
sand contaminants
Bulk density
Research Background
5IGARSS 2011, 24-29 July, Vancouver, Canada
Observational conditions Wavelength
Polarization
Incident angle

Objective
Evaluate the use of ALOS/PALSAR full polarimetric data to
delineate and image the near surface structures in the desert
environment west the Nile River in Egypt.
6IGARSS 2011, 24-29 July, Vancouver, Canada

Description of the Test Site
7IGARSS 2011, 24-29 July, Vancouver, Canada
ALOS/AVNIR-2
Barqa Hill
Nile
Riv
er
Nile
Riv
er

Radar Polarization Transformation of ALOS/PALSARRadar Polarization Transformation of ALOS/PALSAR
8IGARSS 2011, 24-29 July, Vancouver, Canada
© E. Pottier – J.S. Lee (2011)

Radar Polarization Transformation of ALOS/PALSARRadar Polarization Transformation of ALOS/PALSAR
9IGARSS 2011, 24-29 July, Vancouver, Canada
© E. Pottier – J.S. Lee (2011)
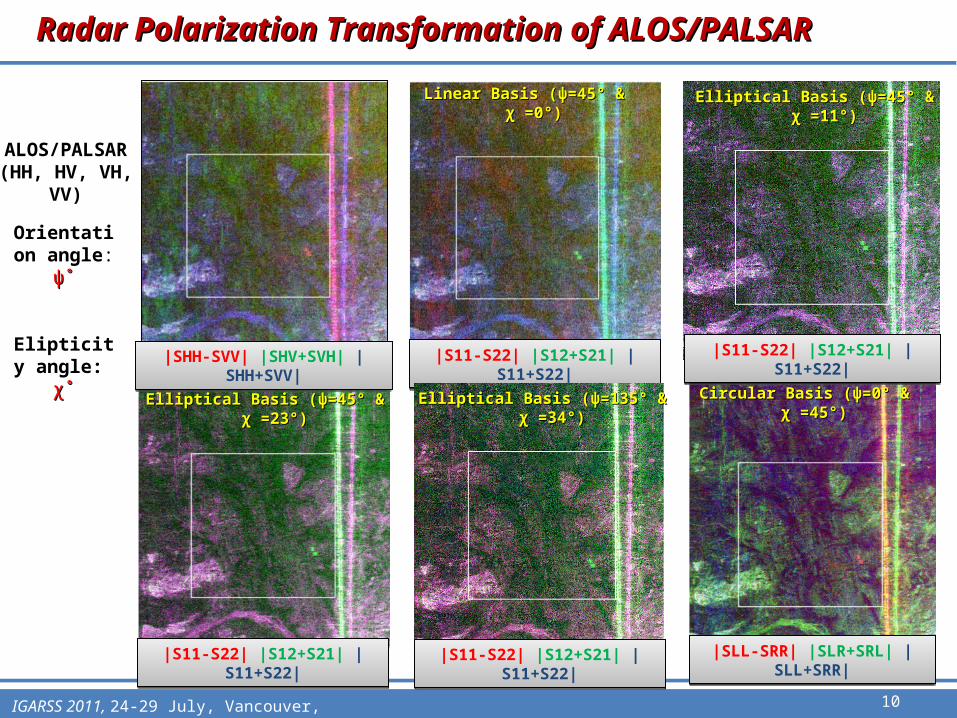
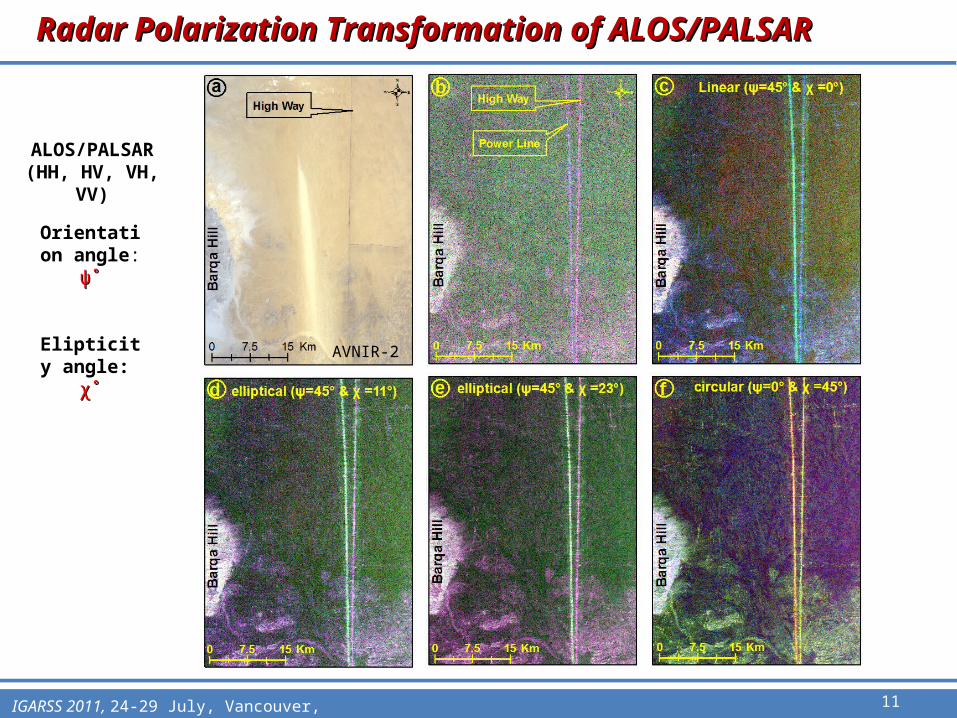
Radar Polarization Transformation of ALOS/PALSARRadar Polarization Transformation of ALOS/PALSAR
Orientation angle: ψ˚ψ˚
Elipticity angle: χ˚χ˚
ALOS/PALSAR(HH, HV, VH, VV)
10IGARSS 2011, 24-29 July, Vancouver, Canada
|SLL-SRR| |SLR+SRL| |SLL+SRR||SLL-SRR| |SLR+SRL| |SLL+SRR|
|SHH-SVV| |SHV+SVH| |SHH+SVV||SHH-SVV| |SHV+SVH| |SHH+SVV| |S11-S22| |S12+S21| |S11+S22||S11-S22| |S12+S21| |S11+S22|
|S11-S22| |S12+S21| |S11+S22||S11-S22| |S12+S21| |S11+S22|
Linear Basis (Linear Basis (ψψ=45° & =45° & χ χ =0°) =0°)
Elliptical Basis (Elliptical Basis (ψψ=45° & =45° & χ χ =23°) =23°) Circular Basis (Circular Basis (ψψ=0° & =0° & χ χ =45°) =45°)Elliptical Basis (Elliptical Basis (ψψ=135° & =135° & χ χ =34°) =34°)
|S11-S22| |S12+S21| |S11+S22||S11-S22| |S12+S21| |S11+S22|
Elliptical Basis (Elliptical Basis (ψψ=45° & =45° & χ χ =11°) =11°)
|S11-S22| |S12+S21| |S11+S22||S11-S22| |S12+S21| |S11+S22|
Radar Polarization Transformation of ALOS/PALSARRadar Polarization Transformation of ALOS/PALSAR
Orientation angle: ψ˚ψ˚
Elipticity angle: χ˚χ˚
ALOS/PALSAR(HH, HV, VH, VV)
AVNIR-2
11IGARSS 2011, 24-29 July, Vancouver, Canada

Radar Polarization FilteringRadar Polarization Filtering
Optimal Polarization Contrast Enhancement (O.P.C.E) method (Kostinski, and Boerner, 1987)
12IGARSS 2011, 24-29 July, Vancouver, Canada
Buried fracturesSurrounding the fractures

Radar Polarization FilteringRadar Polarization Filtering
The Proper Polarization State of Buried Fracture Imaging
iteration = 8
Final Contrast = 2.153422e+000
Optimal Transmit Polarizationg0 = 1.000000e+000g1 = 9.928611e-001g2 = 1.098681e-002g3 = 1.187688e-001
Optimal Receive Polarizationh0 = 1.000000e+000h1 = -9.832537e-001h2 = -1.133955e-001h3 = 1.426660e-001
Initial Contrast = 1.047321e+000
Buried fractures (Svv) and surrounding (Shh)
13IGARSS 2011, 24-29 July, Vancouver, Canada

Radar Polarization FilteringRadar Polarization Filtering
Polarization filtering effect: (a) before, and (b) after applying the O.P.C.E
14IGARSS 2011, 24-29 July, Vancouver, Canada

Preliminary resultsPreliminary results
(a) ALOS/AVNIR-2, and (b) ALOS/PALSAR processed image
10 km 10 km10 km
(a) (b)
15IGARSS 2011, 24-29 July, Vancouver, Canada
Ephemeral river
Ephemeral river
Ephemeral river
Bar
qa
Hil
l
Bar
qa
Hil
lB
arq
a H
ill

Field ValidationField Validation
Very dry soil moisture with values 0%, 0.3%, 0.6% and the maximum value is 1.7%
1) Measuring the soil volumetric moisture using (TDR)
16IGARSS 2011, 24-29 July, Vancouver, Canada
Field ValidationField Validation
εr = 3.04
The low moisture content and low RMS height are providing good The low moisture content and low RMS height are providing good
conditions for RADAR to penetrate relatively deepconditions for RADAR to penetrate relatively deep
The average hRMS = 0.01 cm
17IGARSS 2011, 24-29 July, Vancouver, Canada
Soil moisture with values 0%, 0.3%, 0.6% and the maximum value is 1.7%

Field ValidationField Validation
Acquiring GPR survey using 270 MHz shielded antenna
21 GPR profiles were surveyed
18IGARSS 2011, 24-29 July, Vancouver, Canada

1919IGARSS 2011, 24-29 July, Vancouver, Canada
A A’
B B’
C C’
ALOS/PALSAR

Application point of viewApplication point of view
Extracted faults from (a) official geologic map, (b) processed ALOS/PALSAR data and (c) density map of highly fractured areas (brown color)
20IGARSS 2011, 24-29 July, Vancouver, Canada

Application point of viewApplication point of view
SRTM-DEM, drainage patterns and watersheds surrounding Kom Umbo basin
21IGARSS 2011, 24-29 July, Vancouver, Canada

ConclusionConclusion Circular polarization information of PALSAR L-
band data has been used in this study to detect hidden fault structures striking in various directions.
The Optimal Polarization Contrast Enhancement (O.P.C.E) method which maximizes the ratio of backscattered strength between faults (targets) and the surrounding sedimentary material (clutter) clearly defined the fault zones.
Faults that are largely undetectable on optical images or on the ground were detected on satellite radar images and confirmed with GPR.
These highly fractured zones are possibly favorable zones for groundwater accumulation. 22IGARSS 2011, 24-29 July, Vancouver, Canada

23IGARSS 2011, 24-29 July, Vancouver, Canada

24

IGARSS 2011 24-29 July, Vancouver, Canada 25
Field Photographs;Field Photographs;

IGARSS 2011 24-29 July, Vancouver, Canada
Field ValidationField Validation
2) Measuring the surface roughness using the Pinemeter
The average hRMS was 0.01 cm across all sites, with a maximum of 0.2 cm (almost flat)
26

27
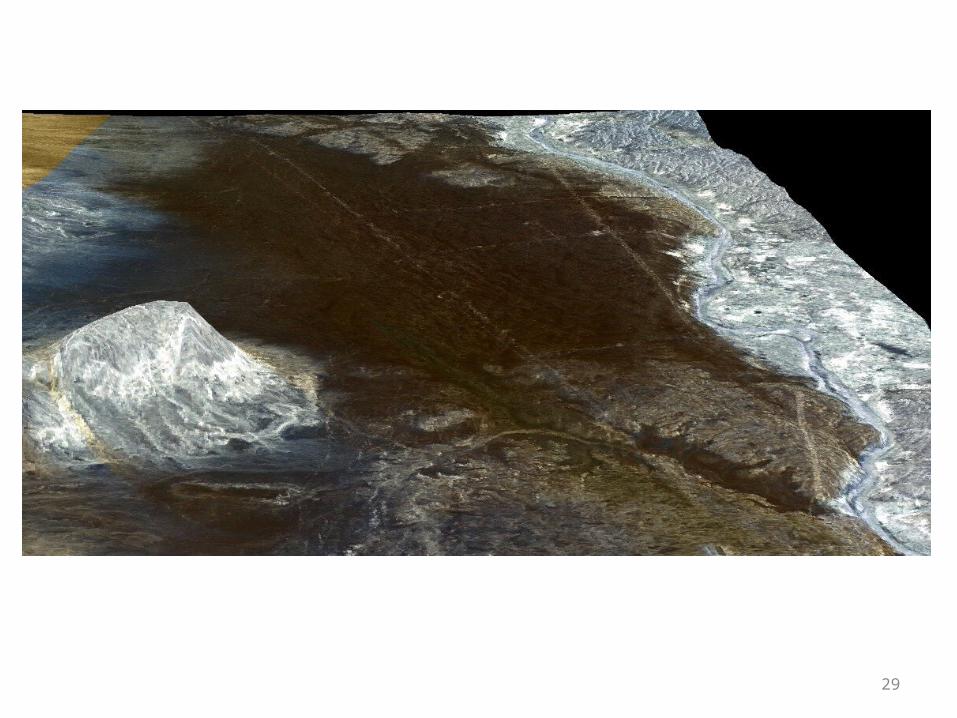
Hill shaded relief image has been generated from the SRTM Hill shaded relief image has been generated from the SRTM
Kom Umbo Kom Umbo

28
Geologic map of Aswan (2005)Geologic map of Aswan (2005)
29


















