
IEEII TRANSAC1~1ONSON AUTOMATIC An Algorithm for Tracking...
12
IEEII TRANSAC1~1ONS ON AUTOMATIC CONTROL, VOL. Ac-24, NO. 6, DECEMBER 1979 843 An Algorithm for Tracking Multiple Targets DONALD B. REID, MEMBER, IEEE Abstract—An algorithm for tracking multiple targets In a cluttered algorithms. Clustering is the process of dividing the entire environment Is developed. The algorithm Is capable of Initiating tracks, set of targets and measurements into independent groups accounting for false or m[~clng reports, and groom sets of dSPeU&IIt ~or clusters~ Instead of solvin one lar e roblem a reports~ As each measurement Is received, probabilities are ~*uI~ted for ~ g g ~‘ the hypotheses that the measurement ~ f~ ~ IUM)Wfl ~ number of smaller problems are solved in parallel. Fi- in a target file, or from a new target, or that the measurement Is false. nally, it is desirable for an algorithm to be recursive so Target states are estimated from each such da*a-as.soclatloo hypothesis that all the previous data do not have to be reprocessed using a 1C~InlQn filter. As mere measurements are received, the probabill- whenever a new data set is received. ties of Joint hypotheses are calculated recursively using all available The a! onthm can easurements fro inforv~~Hn such as density of wiknown targets, density of false ~ g use m rn two ~.~er- probability of ietectlon, ami location ~rtainty. mis ~iciiing tecii- cut generic types of sensors. The first type is capable of nique allows correlation of a asurement with Its a based on sending information which can be used to infer the num- subsequent, as well as previous, data. To keep the number of hypotheses ber of targets within the area of coverage of the sensor reasonable, unlikely hypotheses are eliminated and hypotheses with similar Radar is an example of this type of sensor Tius type of target estimates are combined. To mlnhnlie CO put5tlOnal ~ sensor enerates a data set consistin of the entire set of targets and me airements Is divided Into dusters ~ g g one or more solved independently In an illustrative example of aircraft ~ the reports, and no target can originate more than one report algorithm successfully tracks targets over a wide range sf per data set (The terms “data set” and “scan” are used interchangeably in this paper to mean a set of measure- !. INTRODUCTION ments at the same time. It is not necessary that they come from a sensor that scans.) The second type of sensor does T HE SUBJECT of multitarget tracking has application not contain this “number-of-targets” type of information in both military and civilian areas For instance, ap- A radar detector, for example, would not detect a target plication areas include ballistic missile defense (reentry unless the target’s radar were on In this case, very little vehicles), air defense (enemy aircraft), air traffic control can be implied about a target’s existence or nonexistence (civil air traffic), ocean surveillance (surface ships and by the fact that the target is not detected Also, for the submarines), and battlefield surveillance (ground vehicles second type of sensor, individual reports are transmitted and military units) The foremost difficulty in the apphca- and processed one at a time, instead of in a data set The tion of multiple-target tracking involves the problem of multiple-target tracking algorithm developed here associating measurements with the appropriate tracks, accounts for these factors by using the detection and especially when there are missing reports (probability of false-alarm statistics of the sensors, the expected density detection less than unity), unknown targets (requiring of unknown targets, and the accuracy of the target esti- track initiation), and false reports (from clutter) The key mates development of this paper is a method for calculating the A number of complicating factors not considered in this probabilities of various data-association hypotheses With paper include nonlinear measurements, nonlinear dy- this development, the synthesis of a number of other namics, maneuvering targets (abrupt and unknown features becomes possible change m target dynamics), requirement for an adaptive In addition to the above data-association capabilities, algorithm (to account for unknown statistics), some the algorithm developed in this paper contains the desir- aspects of multiple sensors (problems of sensor configura able features of multiple-scan correlation, clustering, and tions, registration, and different types of mformation), recursiveness Multiple-scan correlation is the capability and time-delayed or out-of-sequence measurements The to use later measurements to aid in prior correlations first four factors have already been investigated exten- (associations) of measurements with targets This feature sively in the single-target case, and do not aid in illununat- is usually found in batch-processing or track-splitting ing the multiple-target problem The inclusion of the last two factors would greatly increase the scope of this paper. Manuscript received April 25, 1978; revised June 21, 1979. ~ In addition, the real-world constraints involved in imple- recommended by J. L Speyer, Chairman of the Stochastic Control menting this algorithm are not explicitly considered. Comnuttee. This WOrk was supported by the Lockheed “Automatic Multisensor/Muitisource Data Correlation” Independent Development References [IJ—[8] are the basic reference papers that 1~e author is with the Lockheed Paio Alto Research Laboratory Palo illustrate previously known techniques for solving the Alto, CA 94304. ‘ multiple-target tracking problem. The scope of each of 0018-9286/79/ 1200-0843$OO.75 © 1979 IEEE
Transcript of IEEII TRANSAC1~1ONSON AUTOMATIC An Algorithm for Tracking...

IEEII TRANSAC1~1ONSON AUTOMATIC CONTROL, VOL. Ac-24, NO. 6, DECEMBER 1979 843
An Algorithm for Tracking Multiple TargetsDONALD B. REID, MEMBER, IEEE
Abstract—An algorithm for tracking multiple targetsIn a cluttered algorithms. Clustering is the processof dividing the entireenvironment Is developed.The algorithm Is capableof Initiating tracks, set of targets and measurementsinto independentgroupsaccountingfor falseor m[~clngreports,andgroom setsof dSPeU&IIt ~or clusters~ Instead of solvin one lar e roblem areports~As eachmeasurementIs received,probabilities are~*uI~ted for ~ g g ~‘thehypothesesthat themeasurement~ f~ ~ IUM)Wfl ~ number of smaller problems are solved in parallel. Fi-in atarget file, or from a new target,or that themeasurementIs false. nally, it is desirable for an algorithm to be recursive soTargetstatesareestimatedfrom each such da*a-as.soclatloohypothesis that all the previous data do not have to be reprocessedusing a1C~InlQnfilter. As meremeasurementsarereceived,the probabill- whenevera new data set is received.ties of Joint hypothesesare calculatedrecursivelyusing all available The a! onthm can easurementsfroinforv~~Hnsuchas densityof wiknown targets,densityof false~ g use m rn two ~.~er-probability of ietectlon, ami location ~rtainty. mis ~iciiing tecii- cut generic types of sensors.The first type is capable ofnique allows correlation of a asurementwith Its a basedon sendinginformation which canbe used to infer the num-subsequent,aswell asprevious,data.To keepthenumberof hypotheses ber of targets within the area of coverageof the sensorreasonable,unlikelyhypothesesareeliminatedandhypotheseswith similar Radar is an example of this type of sensor Tius type oftargetestimatesarecombined.To mlnhnlie CO put5tlOnal ~ sensor enerates a data set consistin oftheentire setof targetsandme airementsIs divided Intodusters~ g g one or moresolvedindependentlyIn an illustrative exampleof aircraft~ the reports,andno target can originate more than one reportalgorithmsuccessfullytrackstargetsoverawide rangesf per data set (The terms “data set” and “scan” are used
interchangeably in this paper to meana set of measure-!. INTRODUCTION ments at the sametime. It is not necessarythatthey come
from a sensorthat scans.)The secondtypeof sensordoes
T HE SUBJECT of multitarget tracking hasapplication not contain this “number-of-targets” typeof informationin both military and civilian areas For instance,ap- A radar detector, for example, would not detecta target
plication areas include ballistic missile defense(reentry unless the target’s radar were on In this case,very littlevehicles), air defense(enemy aircraft), air traffic control can be implied about a target’s existenceor nonexistence(civil air traffic), ocean surveillance (surface ships and by the fact that the target is not detected Also, for thesubmarines),andbattlefield surveillance (ground vehicles secondtype of sensor,individual reportsare transmittedand military units) The foremost difficulty in the apphca- andprocessedone at a time, instead of in a dataset Thetion of multiple-target tracking involves the problem of multiple-target tracking algorithm developed hereassociating measurements with the appropriate tracks, accounts for these factors by using the detectionandespecially when there are missing reports(probability of false-alarmstatisticsof the sensors,the expecteddensitydetection less than unity), unknown targets (requiring of unknowntargets,and the accuracy of the target esti-track initiation), andfalse reports (from clutter) The key matesdevelopmentof this paper is a method for calculatingthe A number of complicating factors not consideredin thisprobabilities of variousdata-associationhypothesesWith paper include nonlinear measurements, nonlinear dy-this development, the synthesis of a number of other namics, maneuvering targets (abrupt and unknownfeatures becomespossible change m target dynamics),requirement for an adaptive
In addition to the above data-associationcapabilities, algorithm (to account for unknown statistics), somethe algorithm developedin this paper containsthe desir- aspectsof multiple sensors(problems of sensorconfiguraable features of multiple-scan correlation, clustering, and tions, registration, and different types of mformation),recursiveness Multiple-scan correlation is the capability and time-delayed or out-of-sequencemeasurementsTheto use later measurementsto aid in prior correlations first four factors have alreadybeen investigated exten-(associations)of measurementswith targets This feature sively in the single-targetcase,anddo not aid in illununat-is usually found in batch-processing or track-splitting ing the multiple-target problem The inclusion of the last
two factors would greatly increasethe scopeof thispaper.Manuscript receivedApril 25, 1978; revised June 21, 1979. ~ In addition, the real-world constraints involved in imple-
recommendedby J. L Speyer,Chairman of the StochasticControl menting thisalgorithm arenot explicitly considered.Comnuttee.This WOrk was supportedby the Lockheed “AutomaticMultisensor/MuitisourceDataCorrelation” IndependentDevelopment References [IJ—[8] are the basic reference papers that
1~eauthoris with theLockheedPaio Alto ResearchLaboratoryPalo illustrate previously known techniques for solving theAlto, CA 94304. ‘ multiple-target tracking problem. The scopeof each of
0018-9286/79/1200-0843$OO.75 ©1979IEEE

844 IEEE TLkNSACrI0NS ON AUTOMATIC CONTROL, VOL. AC-24, ito. 6, DECEM~EJti~
AlgorithmCharacteristics
Reference
1 2 3 4 5 6 7 8
Multiple Targets No No Yes Yes Yes Yes Yes YesMissing Measurements Yes Yes Yes No Yes Yes No YesFalse Alarms (e.g.. Clutter Yes Yes Yes No Yes Yes Yes YesTrack Initiation No No No No Yes Yes No YesSensor Data Sets (e.g..Number-of-Targets Yes Yes Yes No Yes Yes No NoInformation)
Multiple-Scan Correlation Yes No No Yes Yes No Yes YesClustering No No Yes No No No No NoRecursive (i.e., Filter) Yes Yes Yes Yes No Yes Yes No
these papersis summarized in Table 1. In addition, therearea number of good papers incorporated into and refer-encedby these eight references which are not repeatedhere. A more comprehensivesetof papers is included inthe recent survey paper by Bar-Shalom [9]. The algorithmdeveloped in this paper includes all the characteristicsshownin Table I.
Reference [1], by Singer et a!., is the culmination ofseveralprevious papersby the authors. In this reference,they develop an “N-scan filter” for one target. Whenevera set of measurementsis received, a set of hypotheses isformed as to the measurementthat was originatedby thetarget. This branching processis repeatedwhenever a newset of measurementsis received so that an ever-expandingtree is formed. To keep the number of branches to areasonable number, all branches which have the last Nmeasurementsin commonarecombined. A simulation oftheir filter was included in the paper. The significantfinding of their simulation was that, for N= 1, the N-scanfilter gavenear-optimalperformance. This is significant inthat the concept of track-splitting hasbeen immediatelydiscountedby others as being too expensive.
In [2], Bar-Shalom and Tse also treat a single targetwith clutter measurements.They develop the “probabilis-tic data association” filter that updates one target withevery measurement, in proportion to the likelihood thatthe target originated the measurement.The filter is subop-tinial in that track-splitting is not allowed (i.e., it is anN= 0 scanfilter). In [3], Bar-Shalom extendsthis filter tothe multiple-target case.He separatesall the targets andmeasurementsinto “clusters” which canthen be processedindependently. He then suggests a rather complicatedtechnique to calculate the probability of each measure-ment originating from each target. Compared to his tech-nique, the derivation in this paper reduces to a relativelysimple expression,asdiscussedin Section IV.
In [4], Alspach applies his nonlinear “Gaussian sum”filter [101 to the multitarget problem. His conceptsaresimilar to those above; however, it should be noted thathis filter is not optimal in that the density function he istrying to estimate “does not containall the informationavailable in the measurementssinceat eachstagethe stateof the target giving rise to the nth measurementis condi-tioned on only the nth measurement...”and not all
measurementsup to this stage. This paper is unique j~estimating the type of target (a discrete state) as well a.sthe target’s continuous-valued states.
Reference[5], by Sittler, was publishedaheadof its timeand is included here eventhoughit is ten yearsolderthanany of the other basic references. By using very simple
processes,Sittler illustrated most of the major Conceptsinmultitargettracking. In addition to track initiation, fal~alarms,andmissingmeasurements,he includedthe possi-bility of a target ceasingto exist (track termination),afactor not covered in this paper. This possibility results inseveral otherconcepts, such as track status. If data arebeing receivedthat eliminatethe possibility of the trackbeingdropped, then the track status is defined to be good.
In [6], Stein and Blackman implement and modernizemostof the conceptssuggestedin [5]. As in [5], theyretainthe conceptof trackdropping,as well as track initiation.and derive two gates around each target. In their im-plementation, they choose a suboptimal sequentialmethod of processing the data. As each set of data isreceived,only the most likely assignment of targets andmeasurementsis selected.
In [7], Smith and Buechler very briefly present abranching algorithm for multiple-target tracking. Bycalculatingthe relativelikelihood of each branch, theyareable to eliminate unlikely branches. In calculating thelikelihoods, they assumethat eachtarget is present(~D=
1) and do not account for false-alarm statistics. Moreseriously, however, they apparently allow a target to beassociated with every measurement within its gate. Ifmeasurementsarewithin severalgates,this leadsto setsofdata-associationhypothesesthat are not mutually exclu-sive.,On the otherhand,thead hocprocedureof eliminat-ing brancheswhose estimatesare less than a specifieddistanceawaypartiallyremediesthis problem.
In [8], Morefield solvesfor the most likely data-associa-tion hypothesis (as opposedto calculating the probabili-ties of all the data-associationhypotheses).He doesso byformulating the problem in the framework of integerlinearprogramming;as such,it is an interestingapproach.His algorithm is basically a batch-processingtechnique.Even thougha recursiveversion is included,it does notguaranteeoptimality over several time intervals as thebatch-processingversion does.
For the remainderof this paper,it is assumedthateachtarget is represented by a vector x of n statevariableswhich evolveswith time accordingto known laws of theform
x(k+ 1)=4)x(k)+rw(k) (I)
4) = the statetransition matrixr= the disturbancematrixw= a white noise sequenceof normal random
variableswith zero meanand covarianceQ.
TABLE ISCOPE OF CURRENT PApuasP4MULTIPLE-TARGET TRACKING
where

MULUk’Lt~LA.Kt.iEIS 845
These state variables are related to measurementsz~ccotdingto
z(k)Hx(k)+v(k) (2)
H = ameasurementmatrixo= a white noise sequenceof normal random’
variableswith zeromeanandcovarianceR.
If the measurementscould be uniquely associatedwitheach target, then the conditional probability distributionof the statevariables of each target is a multivariatenormal distribution given by the Kalman filter [11]. Themeani and covarianceP of this distribution evolve withtime betweenmeasurementsaccordingto the following“time update” equations:
1(k+ l)=4)1(k~
F(k+ l)=4)P(k)4)T+rQr~T
Whena measurementis received,the conditional mean~and covarianceP are given by the following “measure-ment update” equations:
~(k) = 1(k)+ K[ z(k) — 111(k)]
fi(k)= ~~~iHr(HFHT+R)~HF
K= PHTR ~.
II. OVERVIEW OF THE ALG0IuTH1A
A flow diagramof the tracking algorithm is showninFig. I. Most of the processing is done within the foursubroutines shown in the figure. The CLUSTR subroutineassociatesmeasurementswith previous clusters. If two ormore previously independent clUsters are associatedbe-causeof a measurement,then the two clusters are com-bined into a “super cluster.” A new cluster is formed for.anymeasurementnot associatedwith a prior cluster. Aspart of the initialization program, previously knowntargets form their ownindividualclusters.
The HYPGEN subroutine forms new data-associationhy-pothesesfor theset of measurementsassociatedwith eachcluster. The probability of eachsuch hypothesisis calcu-lated and target estimatesare updated for eachhypothesisof eachcluster.
Both the cj..usi’a and RYPGEN subroutinesuse the RE-DUCE subroutine for eliminating unlikely hypothesesorCombininghypotheseswith similar target estimates.Oncethe set of hypothesesis simplified by this procedure,Uniquely associatedmeasurementsare eliminated from thehypothesis matrix by the MASH subroutine. Tentativetargets becomeconfirmedtargetsif they were the uniqueOrigin of the eliminnied measurement.
Receive New J~taSet
Perform Targel TimeUpdate
III. H’~i’omEsmsGENERATIONTECHNIQUE
The basic approach used in this paper is to generate asetof data-associationhypothesesto account for all possi-ble origins of everymeasurement.The filter in this papergeneratesmeasurement-orientedhypotheses,in contrast to
(4) target-oriented hypothesesdevelopedin [2] and [3). In thetarget-orientedapproach, every possible measurement islisted for each targetand vice versa for the measurement-oriented approach. Although bothapproachesare equiv-alent, a simplerrepresentationis possiblewith the target-oriented approach if there is no requirementfor trackinitiation. However, with a track initiation requirement,themeasurement-orientedapproachappearssimpler.
L~tZ(k) ~ {Zm(k), m=l,2,---,Mk) denotethe set ofmeasurementsin datasetk; ZR ~ (Z(l),Z(2),. . . ,Z(k))denote the cumulativeset of measurementsup throughdataset k; ~
2k ~ ~ i=l,2,- - ik) denote the setof all
hypothesesat the time of data setk which associatethecumulativesetof measurementsZ” with targets or clutter;and f~m denote the set’ of hypothesesafter the mthmeasurementof adatasethasbeenprocessed.As a newset~of measurementsZ(k + 1) is received,‘a new set ofhypotheses~k+ I is formed as follows: ~2°isinitialized bysetting (~O= ç~k~A newsetof hypothesesa” is repetitivelyformedfor eachprior hypothesis~27’— andeachmeasure-ment Zm(k + 1). Each hypothesisin this new set is thejoint hypothesisthat fl7’ ~‘is true and that measurementZm(k+ I) came from targetj. The valueswhich j mayassumeare0 (to denote that the measurement is a falsealarm), the value of any prior target, or a value onegreaterthan the current number of tentative targets(todenote that the measurementoriginated from a new
where
I InitIalIzatIon
IA priori targetsREDUCE
Reduce number~]hypotheses byeltn,jnationorcombination.
CLUSTRForm new clusters.Identifying which targets I*nd measurementsareassociatedsith eachcluster.
RYPGEP~
Form new set of hypo-theses, calculate theirprobabilities, and per—form * targetmeasure-ment update for eachhypothesisof etchcluster.
MASH
Simplify hypothesis matrixof eachcluster. Transfertentative targets with unityprobability to confirmedtargetcategory. Createnewclusters for confirmedtargetsno longer in hypo-thesis,matrix.
(3)
Return fornext data set
F~top DFig. I. Flow diagramof multiple-targettrackingalgorithm.

84 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. AC-24, NO. 6, DECEMgg~~
target).This techniqueis repeatedfor everymeasurementin the new data set until the set of hypotheses~I”~~=~ is formed.
Beforeanew hypothesisis created,the candidatetargetmust satisfy a set of conditions. First, if the target is atentativetarget,its existencemustbe implied by the priorhypothesisfrom which it is branching.Second,acheck ismadeto ensure that each target is not associatedwithmore than one measurementin the current data set.Finally, a target is only associatedwith ameasurementifthe measurementlies within the gate or validation regionof the target. If I and P are the meanandcovarianceofthe target estimatefor the prior hypothesis~ then thecovarianceof v = Zm — HI is given by
B=HPHT+R (5)
and the measurementZm lies within an “i~-sigma”valida-
tion region if
(Zm — H1)TB ~(Z~ I11)<ij2.
Note that the validation region also dependson themeasurementssince R is included in (5); however, forsimplicity, it is assumedthat all observationsin the samedatasethavethesamecovarianceR.
The representationof the hypothesesas a tree and asstoredin the computeris shownin Fig. 2 for a representa-tive cluster of two targets and three measurements.Forthe example,the prior targetsarenumberedI and 2, andthe new tentative targetsare numbered3, 4, and 5. Thethreemeasurementsin the data set are numbered11, 12,and 13. Notice, for example, that if target 2 is alreadyassignedto either measurement11 or 12, abranchassign-ing it to measurement13 will not be formed since it IS
assumedthat one target cannot generate more than onemeasurementifl a data set The set of hypothesesisrepresentedin a computerby atwo-dimensionalarray,the“hypothesismatrix” which hasa row for eachhypothesis,and a column for each measurement.The entry in thearray is the hypothesizedorigin of the measurementforthat particularhypothesis In programmingthe automatichypothesisgenerationroutine,a simplification of the hy-pothesismatrix occursif ‘the “prior hypothesisloop” isplacedinside the “measurementloop.” In this case,thehypothesis matrix at one stage is just a subset of thehypothesismatrix for the next stage as shown in thefigure. This follows the numberingschemefor hypothesesusedin [1].
Althoughthere may be many hypothesesin a cluster, asfar as each target in the cluster is concernedtherearerelatively few hypotheses.As an example, the clustershown in Fig. 2 has 28 hypotheses;however, as far astarget 1 is concerned,it only hastwo hypotheses:either itis associatedwith measurement11 or it is not associatedwith any measurement.Similarly, targets2, 3, 4, and 5have 4, 2, 2, and 2 target hypotheses,respectively.A
Target
~,easuremest
Configuration of MegetsandmeasurementS0 example clubtlr
Origin of Measurement(ii) (12) (ii)
ii *y_~__0
/ N/N
(6) /~t~o
/~
Fig. 2.
After 3Metsuremeets
After 2Measurements
After I
Mea surement Trr21011
Li0i Ii
Ii1°
_____I0~i 4
12 0 5305025
)l 2 53 2 5
II 4 5~I 4 512 4 5
Hypothesismatrixin csmputer
Hypotheses represenMdas branches Of a tree
Representationof hypothesismatrix.
“hypothesisrelationshipmatrix” is createdfor eachtarget,listing thoseclusterhypotheseswhich correspondto eachtargethypothesis.Alternative target statesare then esti-mated for each target hypothesisand not each clusterhypothesis.The targetestimatesfor each hypothesisarecalculatedby usinga Kalmanfilter. Theconditionalprob-ability distribution‘for the targetstatesis thenthe sum ofthe individual estimatesfor eachhypothesis,weightedbythe probability of eachhypothesis
IV. PROBABILITY OF EACH HYPOTHESIS
The derivation for determining the probability of eachhypothesis dependson whether the measurementsarefrom a type 1 sensoror type 2 sensor.A type 1 sensor iS
one that includesnumbers-of-targetstype inforfliatlon ~well as informationon the locationof eachtarget.All themeasurementsin suchadatasetare consideredtogether.In addition, an estimateof thenew targetdensitymustbemaintainedto processmeasurementsfrom this tYPC ofsensor.A type 2 sensorsendsonly positive reports.Onemeasurementata time is processedfor this typeof senSofand the new target density is not changedafter eachreport.

get,achisti-;terare
:ob-rio1
by
ichare
isas
£hCiet.beof
InC
sortCli
p,EID ALGORITHM FOR TRACKING MULTIPLE TARGETS ‘ 847
A. Type3 Sensor Assignment: The specific sourceof eachmeasurementwhich has been assignedto be from some previously
Let p,k denotethe probability of hypothesis~ given known target.measurementsup through time k, i.e., .
Also, it is worth noting that the pnor hypothesis~ -
pk ~e(~zk). (7) includes information ‘as to the number of previously
knowntargetsN~.(g) within theareaof coverageof theWe mayview l2~as the joint hypothesisformed from sensor.This numberincludesanytentativetargetswhose
the prior hypothesis~ —‘ and the associationhypothesis existenceis implied by that prior hypothesis,as well as thefor the currentdatasets~.The hypothesis4~involves the confirmed targetsfor that cluster. However,accordingtohypotheticalassignmentof everymeasurementin thedata the currentdata-associationhypothesis,only NDT of thesesetZ(k) with a target.We maywrite a recursiverelation- targetsaredetectedby the sensor.ship for P,” by use of Bayes’equation It is assumedthat the number of previously known
targetsthat are detectedis given by a binomial distribu-Ink — I ~“ ‘-~s’i— p(7,’z,\ ok — I tion, the numberof falsetargetsfollows a Poissondistrib-
‘1
Vh ‘~‘°J/— I. ~. I ‘‘Vh’g g ution and the number of new targets also follows a
P(’Ph ~ — I) P(~2~-‘) (8) Poissondistribution Wtth theseassumptions,the proba-bility of the numbersNDT, Nm.., andNNT given £2~ is
wherefor brevity we have droppedthe conditioningonpastdatathroughdata setk—i. The factorc is anormal- P(NDT,N,,.,NNTI~2~’)izing factor found by summingthe numeratorover thevalues of g andh. The first two termson the right-hand = ( ~‘~‘ )p~bnr(1 i’D) NDT) (10)side(RHS) of the aboveequationwill now be evaluated. ~The first termis the likelihood of themeasurementsZ(k), X FN,,,.( ~ V) FN,J~(I3NTV)given the associationhypothesis,andis given by
whereMK
P(Z(k~12~“i’h) = II 1(m) (9) PD= probabilityof detectionrn—I fl5-1.=densityof falsetargets
where ‘ I3
NT= density of previously unknown targets
f(m) = I / V if the mth measurementis from thathavebeendetected(i.e., theF,, termclutter or a new target hasalreadybeenincludedin it)
= N(Zm — HI, B) if the measurementis from a F5(X)= the Poissonprobability distributionforconfirmed targetor a tentativetarget whose n events when the average rate ofexistenceis implied by the prior hypothesis eventsis A
I The total numberof measurementsis given by
V is the volume (or area)of the region coveredby the illMK—NDT+N~.+AYNT. ‘sensor and N(x,P)_denotes the ‘normal distribution
exp[— fx ~‘P- ixj/~/(2,r)h3)P) The values of x and B Of the MK measurements,therearemanyconfigurations[through (5)] arethoseappropriatefor the prior hypothesis or ways m which we may assignN0~of them to prior
I targets,N~.of them to falsetargets,andNNT of them toThe secondterm on the RHS of (8) is the probability of new targets The numberof configurationsis given by
acurrent data-associationhypothesisgiven the prior hy- ~‘ ~ ‘‘M N ‘~ — N — Npothesis~ Eachcurrentdata-associationhypothesis~J’h f K f K DT ( K DT FT
associateseach measurementin the data set with a \ N~~/\ NFT / \ NNTspecific source;as such,it includesthe following informa- The probability of a specific configuration, given NDT,ion. Nm., andNNT, is then
Number: The numberof measurementsassociatedwith ,,j,” ~. ~Is~%...owigurationDT’~ ~ NTthe prior targets N~~(h),the numberof measurementsassociatedwith false targetsN~.(h),and the numberof = 1 . (12)
measurementsassociatedwith new targetsNNI.(h). ( ~ \ ( Mg — ~Configuration: Those measurementswhich are from \NDT)~ N~.
Previouslyknown targets,thosemeasurementswhich arefrom false targets, and those measurementswhich are For a given configuration, there are many ways tofrom new targets. assign the NDT designatedmeasurementsto the NTGT

8481’
IEEE TRANSACrIONS ON AUTOMATIC CONTROL VOL. AC-24, NO. 6, DECEM~ER1979
targets.The numberof possibleassignmentsis given by
NTGT!(NTGT—NDT)L
The probability of an assignmentfor a given configura-tion is therefore
(NTGT—NDT)!P(Assignment~Configuration)= . (13)
NTGT.
Combining these last three equationsand simplifying,we find that the probability of
P(ti/hl~7~~ NFT!NNT!
x P~’°~(l—
X F~.r(I3FrV)FNNT( PNTV)
Substitutingthis and(9) into (8), we find that
pk=! NFT!NNT! pNorIl .....p ~(Niv~Nor)D ‘S° DIX.
x FN~.(I3
fl.V)FN(flNTV)
NDT
X[llN(Zm_H1~B)] VNNNT~
wherefor easeof notation the measurementshave beenreorderedso that the first NDT measurementscorrespondto measurementsfrom prior targets.Substitutingfor thePoissonprocesses,the dependenceon V is eliminated!Simplifying andcombining constantsinto c, we finallyhave
pk_ !pllDr(l...... PD)(NrGT_NoT)I3;:rpI3;P
X{llN(Zm_HX_~B)JP5k~~I.(16)
This equationis the key developmentpresentedin thispaper.It is similar to (12) in the paperby Singer,Sea,andHousewright[I], exceptit hasbeenextendedto the multi-ple-targetcase.They haveaslightly differentapproachinthat theyareonly concernedwith sensorreturnswithin atarget validation region. If this approachis extendedto themultiple-targetcase(as suggestedby Bar-Shalomin [3]),considerabledifficulty ensuesin the derivation.Also, byconsideringareaoutsidevalidation regions,we now havea trackinitiation capability.
This equationis used iteratively within the hypothesisgenerationroutine to calculate the probability of eachdata-associationhypothesis.Although it appearscom-plicated,it is relativelyeasyto implement.If all thepriorhypothesesare first multiplied by (1— PDY”rGT, then as abranchis createdfor eachmeasurementandits hypothe-sized origin, the likelihood of the branch is found by
either multiplying the prior probability by eitherf3,,., ~or P~N(Z,,,— Hi,B)/(l — ~D) as appropriate.Aftersuch branchesaregeneratedthe likelihoodsare thenfor-malized~
Concurrentlywith the abovecalculations,a calculatjo~of I3N~ the densityof new (i.e., unknown) targets, isperformedwhenevera data set from a type 1 sensorisreceived.The densityof new targetsPNT dependsUponthe numberof timesthe areahasbeenobservedby a type1 sensorand the possibleflux of undetectedtargetsintoand out of the area.
The developmentof this paperhas implicitly assumedthat the probability distributionof the targetstatewouldbe given by or approximatedby a normal distributi0~after one measurement.If the measurementvector con.tainsall the targetstatevariables,thenthe initial stateandcovarianceof a target are given by x= Zm and P R.
~l4’ However, in generalthis will not be true but the normal‘ / distributionassumptionmight neverthelessbe made.For
example, if the target state is position and velocity andonly positionis given in the measurement,thenthe veloc-ity might be assumedto benormallydistributedwith zeromean and a standarddeviation equal to one-third themaximum velocity of the target.
If the measurementsor other factorsare such that the‘15’ assumptionof a normal distribution after onemeasure-‘S ~‘ ment is not agood assumption,thenappropriatemodifi-
cationswould haveto be madeto the gatecriterion, thehypothesisprobability calculationsand the Kalmanfilterequations.As an example, consider the casewhereNtargets on aplane surface,generatetwo setsof line-of-bearing(LOB) reportseachcontainingexactly N LOB’s(i.e., F,,= 1, fl~.=O).The LOB’s intersect in N2 points,correspondingto the N real targetsandN2 — N “ghosts.”Sinceall thestatisticaldegrees-of-freedomin themeasure-mentsare necessaryjust to determinelocation, thereareno additionaldegrees-of-freedomremainingfor correlat-ing oneLOB with another.Therefore,in this case,thereisno gatecriterion for theseconddataset andeachof theN2 pairsareequally likely.
B. Type2 Sensor
To calculatetheprobability thata single measuremeuitfrom a type2 sensoris from a false target,a previoUSlYknown target, or a new target, let us assumethat it IS
selectedat randomfrom a setof NDT + NFT+ N~-pOSS’ble measurements,wheretheprobabilityof NDT, N~1.,andNNT is given by the RHS of (10). For a given Nnr NFT’andNNT, the probability of the measurementbeing fromclutter, aprevioustarget, or a new target is given by theratio of NFT, NDT, and NNT to their sum. Given that ameasurementis from someprevioustarget,theprobabilitYit is from a particular target is l/N~0~.FinallY, thelikelihood of the measurement,given the target Wh1Coriginatedit, is 1 / V if it is from a falseor new targetE”N(Z,,, — Hi, B~)if from a previoustarget.
Combining theseeffects, the likelthood of the meaSU~

RKID: Ai.ooRrnlM FOR TRACKING MULTIPLE TARGETS 849
ment-given ~ NFT, and NNT is given by
e(Ml =JINDT,NFT,NNT)
V,
= NDTN(z_HxB)NTGT
~=—, j=NTGT+l.
V
1~j<N~~
(17)
The unconditional likelihood of the measurementisfoundby taking the expectedvalue of (17), namely,
j=0
N0~=N N(Zm~HXL,,B~,)
TGT= PDN(Zm- 1 ‘~j<N~~.
= =13
NT’ j = N~+ I. (18)
If theselikelihoodsarenormalized,oneobtainsthe proba-bility for each possibleorigin of the measurement.Theimplementationis the sameas for (16) exceptthat onlyone measurementat a time is processedfor .a type 2sensorandthereareno (1 — PD) terms.
V. HY~omEsisREDUCTION TECHNIQUES
The optimal filter developedin the previoussectionrequires an ever-expandingmemory as more data areprocessed.For this reason,techniquàsareneededto limitthe numberof hypothesesso thatapracticalversioncanbe implemented.The goal is an algorithmwhich requiresaminimum amountof computermemoryandexecutiontime while retainingnearlyall the accuracyof the optimalfilter. All the hypothesesmaybe consideredas branchesof a tree: the hypothesis reduction techniquesmay beviewed as methodsof either pruning thesebranchesorbinding togetherbranches.
A. Zero-ScanAlgorithms
A zero-scanfilter allows only onehypothesisto remainafter processingeachdata set.The simplestmethod(andthatprobablymostrepresentativeof currentpractice)is tochoosethemost likely dataassociationhypothesisandusea standardKalmanfilter to estimatetargetstates.This isstrictly a pruningoperation.An improvedvariationof thisis to still choosethe maximum likelihood hypothesisbutto increasethecovariancein the Kalmanfilter to accountfor the possibility of miscorrelations.Another approach,developedin [2] and[3] anddenotedthe probabilisticdataassociation(PDA) filter, is equivalentto combiningall thehypothesesby making the targetestimatesdependon allthe measurements.
B. Multiple-ScanAlgorithms
In multiple-scanalgorithms,severalhypothesesremainafter processinga data set. The advantageof this is thatsubsequentmeasurementsare used to aid in the correla-tion of prior measurements.Hypotheseswhoseprobabili-ties are increasedcorrespondto the casein which subse-quent measurementsincreasethe likelihood of that dataassociation.The simplesttechniqueis againto prune allthe unlikely hypothesesbut keepall the hypotheseswith aprobability abovea specifiedthreshold.In [I], an N-scanfilter for the single-targetcasewas developedin whichhypothesesthat have the last N datascansin commonwere combined.A remarkableconclusionof their simula-tion was that with N only equal to one, near-optimalperformancewasachieved.
An alternative criterion for binding branchestogether(i.e., combining hypotheses)is to combinethosehypothe-ses which have similar effects. Generally, this criterionwould correspondto the N-scancriterion, but not always.If hypotheseswith the last N datascansin commonarecombined, then hypothesesthat differentiate betweenmeasurementsin earlier scansare eliminated.Examplescan be conceived[121 in which it is more important topreserve earlier rather than later hypotheses.For thisreason,this paperusesthe criterion of combining thosehypotheseswith similar effects concurrently with thecriterion to eliminate hypotheseswith a probability lessthan a specified amount a. For two hypothesesto besimilar, they must havethe samenumber of tentativetargetsandthe estimatesfor all targetsin eachhypothesismust be similar, i.e., boththe meansandthe variancesofeachestimatemust be sufficiently close. The meanandcovarianceof the resultingestimateis a combinationoftheindividual estimates.
C. Simplifying the HypothesisMatrix andInitiating Confirmed Targets
By eliminating hypotheses,as in the previoussection,the numberof rows in the hypothesismatrix is reduced.This reductionmayalsoallow us to reducethe numberofcolumns in the hypothesismatrix. If all the entries in acolumn of the hypothesismatrix are the same,then thatmeasurementhasaun queorigin andthat columnmaybeeliminated. This simple procedureis the only techniqueused to simplify the hypothesismatrix of eachcluster. Iftheuniqueorigin of the measurementis a tentativetarget,then thattarget is transferredto theconfirmed targetfile.In other words, the criterion for initiating a new con-firmed targetis thata tentativetargethasa probabilityofexisting equal to one (after negligible hypotheseshavebeendropped).Oncethe hypothesismatrix hasbeensins-plified as muchas possible,manyof the confirmedtargetsfor thatclustermayno longerbe in thehypothesismatrix.Thesetargetsmay then be removedfrom that clustertoform new clustersof their own. In this way, clustersaredecomposedand preventedfrom becomingever larger

850 IEEE TRANSACrIONS ON AUTOMATIC CONTROL, VOL AC-24
, NO. 6, DEC~ER197g
arid larger through collisions. The featuresin this para-graph havebeenincorporatedinto the MASH subroutine.
VI. CLUSTER FoIu~1AnoN
If the entire set of targets and measurementscan bedivided into setsof independentclusters[31, then a greatdeal of simplification may result. Insteadof one largetrackingproblem.a numberof smallertracking problemscan be solved independently.Since the amountof com-puter storageand computationtime grows exponentiallywith the number of targets, this can have an importanteffect in reducingcomputerrequirements.If every targetcould be separatedinto its own individual cluster, theserequirementswould only grow linearly with the numberoftargets.
A clusteris completelydefinedby specifyingthe set oftargetsandmeasurementsin the cluster, andthe alterna-tive data-associationhypothesis(in the form of the hy-pothesismatrix) which relatesthe targets and measure-ments.Included in this descriptionis the probability ofeachhypothesisanda targetfile for eachhypothesis.
As part of the program initialization, one cluster iscreatedfor each confirmed target whose existence isknown a priori. Each measurementof the data set isassociatedwith a cluster if it falls within the validationregion [(6)] of any target of that cluster for any priordata-associationhypothesisof that cluster. A new clusterif formed for each measurementwhich cannot beassociatedwith any prior cluster. If any measurementisassociatedwith two or more clusters,then thoseclustersarecombinedinto a “supercluster.”The set of targetsandmeasurementsof the superclusteris the sum of those inthe associatedprior clusters.The numberof data-associa-tion hypothesesof the superclusteris the productof thenumber of hypothesesfor the associatedprior clusters.The hypothesismatrix, probabilities of hypotheses,andtargetfiles mustbecreatedfrom thoseof their constituentprior clusters.
It canbe verified that the probabilitiesof a set of jointhypothesesformedby combining two or moreclustersisthe same whether calculatedby (16) for the combinedclusters,or by multiplying the probabilitiescalculatedbythis equationfor eachseparatecluster. This property, infact, was oneof the factorsfor choosingthe Poissonandbinomial distributions for describing the number oftargetsin (10).
VII. EXAMPLE TO ILLUSTRATE FILTERCHARACTERISTICS
A simple aircraft tracking problemfrom [1] waschosenfor illustrating and evaluating the filter derived in theprevioussection.The stateof the aircraft is its positionandvelocity in the X andY directions.Measurementsofpositiononly are taken. Eachdimensionis assumedinde-pendent,with identicalequationsof motion,measurementerrors,andprocessnoise, i.e.,
1 0 TO 0 00 1 0
000
T 00’ 11 0
00’1
A. Track Initiation
In the first example.a set of five measurementsat fivedifferent times is used to illustrate track initiation. Forthis example. there are no initially known targets, theinitial density of unknown targetsis 0.5, the density offalsereportsis 0.1, the probability of detectionis 0.9, andboth the processandmeasurementnoisehavevariancesof0.04.The five measurementsareshownas trianglesin Fig.3. The most likely hypothesis after processing eachmeasurementis that there is one target. The estimatedposition,velocity, andIa errorcircle of thetargetfor thathypothesisis also shown in the figure. As expected,theestimatedpositionateach time lies betweenthe previouslyprojectedposition and the measuredposition. After thefirst measurementis processed,thereis a5/6 probabilitythe measurementcamefrom a targetanda 1/6 probabil-ity it camefrom a falsereport,since the relativedensitiesare initially 5:1. The probability thereis atleastonetargetincreaseswith every measurementto 99 + percentafterfive measurements,at which point a confirmed target iscreated.Thereis an interestingeffect afterfour measure-mentsareprocessed.The most likely hypothesisis that allfour measurementscaine from the sametarget (p= 88percent);the secondmost likely hypothesisis that the firstmeasurementcamefrom a falsereport,andtheremainrigthree measurementscame from the same target (p = 4percent).Both of these hypothesesdeclarethat thereisone target, andsince the estimatedstateof the target inboth casesis nearly equal the two hypothesesare auto-maticallycombined.
B. Crossing Tracks
In the next example.we examinethe capability of thefilter to processmeasurementsfrom two crossingtargets.One target starts in the upper left corner and movesdownwardto - the lower right while the othertarget st3Xt~in the lower left corner and movesupwardto the upPerright corner.The existenceof just one of the targetS IS
known a priori. The set of measurementsand the targetestimatescorrespondingto the most likely hypothesisashown in Fig. 4. The first two measurementsatthe top 0the figure areprocessedas in the trackinitiation examPlesand the first two measurementsat the bottom Øj~C
processedas a trackmaintenanceproblem.At k3, how-ever,the two clusters“collide” andasuperclustermade0
A Thisboth clusters and both measurementsis form~
H=Il 0 0 ~1[o 1 0 oj’rqT 01
0 qTj’ R=[~ 0]. (19)

gaip: ALOORrF}Thx FOR TRACKING MULTIPLE TARGETS 851
1 2 3x
4 5 6
Fig. 3. Exampleof track initiation.
(~)(. i K -~ SCAN NUMBER K .
83% PROBABILITY ~. INITIALLY KNOWN TARGETTHAT TARGET txtsis A. MEASUREMENT
,-~ ~ ERROR ELLIPSE~ PROJECTED LOCATION
ESTIMATEDLOCATION K-6
N. /K’SN /
SEPARATE CLUSTERS SEPARATE CLUSTERS~ K -4
~K5
• /K.3
• 2 ONE SUPERCLUSTER
K - ie’~%PROBABILITY THAT MEASUREMENT CAME FRONt
PRIOR TARGET K - 7I I I
0 1 2 3 4 5 6x
Fig. 4 Exampleof crossingtracks
collision is due to the fact that one of the hypothesesinthe top clusteris that the top measurementat k = I wasfrom atarget,but the nextmeasurementwas from clutterSinceweassumedaninitial variancein velocityof 1 0, theabove targetcould haveoriginated the measurementat(3.2,2.9).After the measurementsareprocessed,however,this possibility is so remote that it is ehnunatedAftereliminating all the othernegligible hypothesesat k = 3, thesuperclusteris separatedinto two•clusters,correspondingto the two targets.To processthe two measurementsatk=4, the superclusterhas to be formed again. At thistime, the tentativetarget in the top of the figure becomesa confirmedtarget. Two hypothesesremainafter process-ing the measurementsat k=4; that the lower targetOriginated the lower measurementand the higher targetOriginated the higher measurement(p1= 60 percent) orVice versa(p2= 40 percent).The measurementsat k = 5aresuchthattheyreducethedifferencein probabilitiesofthesetwo hypotheses(to p1 = 54 percent,p2= 46 percent).
This is onecasein which later datadid not helpresolveaprior data-associationhypothesis;in fact, the ambiguitywas increased.At k =5, the data-associationhypothesesatk= 4 are the most significant andare preserved.(If theN= 1 scan filter criterion was used, the hypothesesatk= 4 would havebeeneliminated.)By the time measure-ments at k = 6 are processed,the difference in the hy-pothesesat k 4 is no longer importantsince the targetestimatesare now sosimilar. Fromthenon, we havetwoseparatetrackmaintenanceproblems.
C. High Target Density
The last exampleillustratesthe difficulty of associatingmeasurementsinto tracks~for amorecomplicatedarrange-ment of measurements.This exampleis a single run fromthe MonteCarlo programdescribedin the nextsection.Inthis examplethere are five real targets, the existenceoffour of them is initially knownby the filter The a priorilocation and velocity estimatesof these four targetsaswell asmeasurementsfrom thefirst six scansareshowninFig 5 Both the measurementnoiseandthe processnoiseare relatively large (q= r = 040) The data points areshowngroupedaccordingto themaximumlikelihooddataassociationhypotheses(exceptas notedbelow). In addi-tion, thereare approximately15 otherfeasiblegroupingsof targets that are also possible arrangements.Asmeasurementsare processed,the probabilities of thesedifferent groupings change.For example, at scan 4 themost likely hypothesis is that measurement19 isassociatedwith target 1 andmeasurement18 is associatedwith target2; however,on scan5 andsubsequentscans,anothàhypothesisbecomesthe most likely andreversesthis assignment.The one targetunknownby the filter isbeingformedby measurements2, 8, and 14. Evenat scan4 whenthereis only onemeasurementfor either target 3or the new target, the most likely• hypothesisis thatmeasurements2, 8, and 14 area new targetandmeasure-ments 5, 10, 16, and 20 are from target 3 At scan5,however,the most likely hypothesisis that measurements2, 10, and 14 (as well as 23) arefalse, and that measure-ments5, 8, 16, and20 areassociatedwith target3 At scan6 the likelihood that measurements2, 8, 14, 23, and 30form a new target is increasedandby scan7 it is part ofthe mostlikely hypothesisThis targetdoesnot becomeaconfirmed target until scan9 In eachcase,the generalgrouping of measurementscorrespondsto one of theactualtargets.
VIII. Mowrn C~oSEMULATION
The independentfactors affecting filter performanceinclude both filter characteristics(e.g., the filter criteriafor eliminating or combining hypotheses)and environ-mentalvariables,suchas targetdensity/3~-.,.,measurementaccuracyR, targetperturbancesQ, falsereport densitiesfi~,anddatarate T, ‘
3D~
Y
SCAN NU~BERMEASUREMENTERROR ELLIPSE
3 - ~ PROJECTED LOCATION. ESTIMATED LOCATION
(\ fbi IC) ~
2- ~
K2
1a 83% probability of 1 tarqetfbi 89% pro0ability of I or 2 taroetsId 94% probability of I or more tarqetsIdi 99% probability of 1 or more taraets 188%that all 4 measurements are
from same taroet: 4% that first meas. is false and last T are fromO same tarqefl
le) Il~%probability that tarqet exists (98% that last meas. :ame fromtarget: 1% that last meas. came from new taroet: 1% that last meas.came from false target)
Y
1
6
5
4
3
2

852REID: A
II
to
9
a
4
IEEE TRM4SACTIONSON AUTOMATIC CONTROI VOL. AC-24, NO. 6, DECEM~L9~
1 2 3 4 5 6 7 8 9 10 11 12 13
Fig. 5. Tracking in a densetargetenvironment.
The probability or easeof making correctassociationsbetweentargetsandmeasurementsappearsto be a keyfactor in determining filter performance.As such, theprimary effect of many of the environmentalvariablesmentionedabove is in affecting this factor. The moredense the targets and measurementsor the larger theuncertaintyin their locations, the more difficult it is tomakethecorrectassociations.Thevariables~ fI,.,., andP~determinethe densityof measurementsaccordingto
flM—flFT~’D fliT
and the variancebetweenmeasurementsandeliminatedtargetlocations(justbeforean associationis to be made)is given by
If we makethe approximationthatP~i reachesits steady-state value as given by solving the Kalman filter equa-tions, then P11 can be related to q, r, and 1’. ~D alsoaffectsP11 by affecting the averagetime betweenmeasure-ments. In addition, the actual value of P~1would beaffectedby combininghypothesesso that the relationshipbetweenP11 and q, r, and T must be consideredanapproximation.
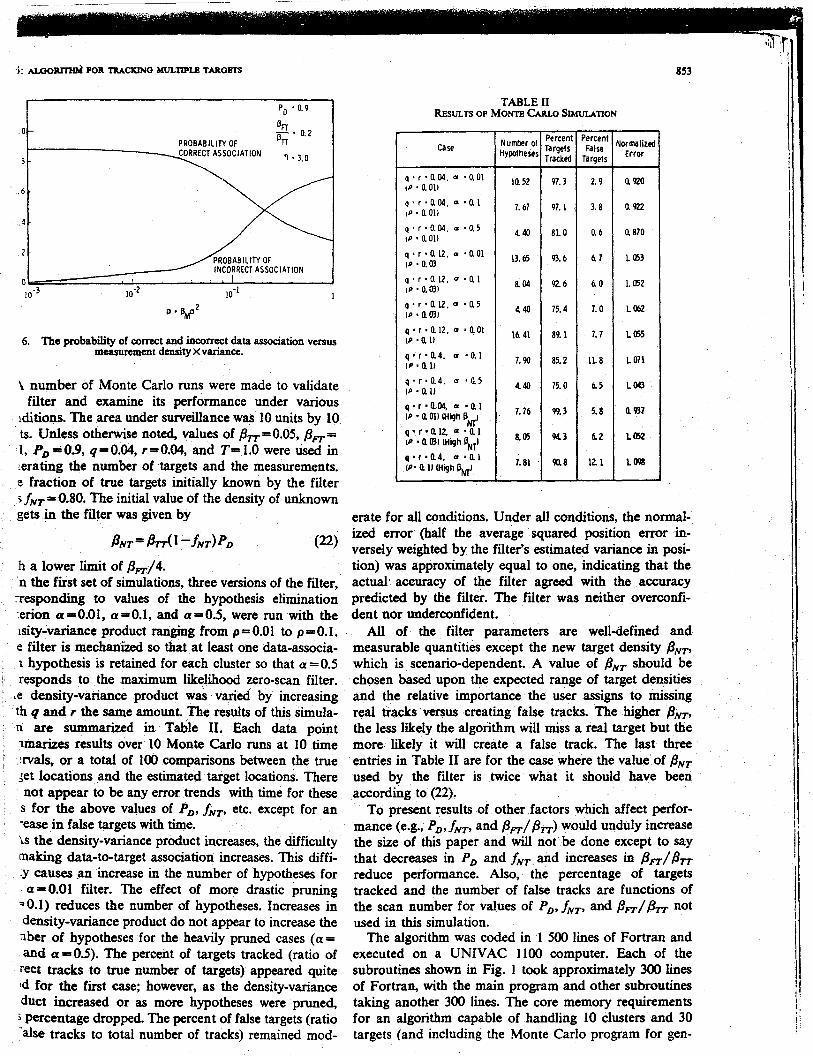
An indication of the increasingdifficulty of associationwith increasingtarget and measurementdensitiesanduncertaintiesis given by the associationprobabilitiesshown in Fig. 6. The figure shows the probability of not
associatingatargetwith ameasurement,andthe probabil-ities of associatinga targetwith ameasurementcorrectlyandincorrectly, as the density-varianceproductincreases.Thesecurvesmaybe viewedas the associationprobabili-tiesof anN = 0 scanfilter in processingonescanof targetinformationwhen the filter knows the numberof truetargetsand their prior locationsfrom the previous.scan,and uses the following associationrules: a target isassociatedwith the closestmeasurementwithin its validation region; if no measurementsare within validatiOn
(20) region (or such a measurementis assignedto anothertarget),thenno measurementis associatedwith the target.The curves do not reflect the performanceof any filterovermorethanonescan.
Thecurvesin Fig. 6 were generatedfor thecasewherea
(21) proportion ~D =0.9 of the true targets generatedameasurement,the relative densityof true targetsto falsemeasurementswas 5/I, andthe targetgatesizewasSinceonly 90 percentof targetsgeneratedmeasUrernea~~the probability of correctly associatinga target with ameasurementis no greater than 90 percent.As the den-sity-varianceproduct increases,this probabilitydecreases.An even worse condition is the relatedincrease~ntheprobability of incorrectly associatinga target and ameasurement.Incorrectassociationcanhavea cascad1~~~effecton tracking algorithmswhich do not account~orit.The probability a target is not associatedwith ameasurementis initially 10 percentfor this set of CO11Wtions and also decreaseswith increasingdensitY~Vah1~
A- 12
ATi
A6
\\\\\\
24 /
---
/3/
—----9,
27
o INITIAL POSITION AND VELOCITYESTIMATES FOR TARGET i.
~ MEASURiMENT m AT SCAN K.
Fig. 6.
Atthe IcondiUnits.0.01.generThe Iwasf.target
with
In I
correscriteridensitThe ILion hcorresThe t
both ~.
Lionsumminterv.targetdid ticruns Iincrea
As t
of ma.cuitythe a{crO.thede:nurnbe0.1 anCorrecgood Iprodutthis pe~f fals
3: ALGORIThM FOR TRACKING MULTIPLE TARGETS 853
numberof MonteCarlo runs weremadeto validatefilter and examine its performanceunder various
lditions. The areaundersurveillancewas 10 units by 10ts. Unlessotherwisenoted,valuesof 13
iT=°.°5
’ /3~.,.=~ ‘~D~0.9, q0.04, r=0.04, and T= 1.0 were usedin~eratingthe numberof targetsand the measurements.e fraction of true targetsinitially known by the filter~JNT 0.80. Theinitial valueof the densityof unknowngetsin the filter was given by
13NT= /3iT(l fNT)~J,
h a lower limit of fl~,/4.ti thefirst setof simulations,threeversionsof thefilter,~respondingto values of the hypothesis elimination:eriona=0.OI,a=0.l, anda=0.5,were run with theisity-varianceproduct rangingfrom p=0.Ol to p=0.1.e filter is mechanizedso that at leastonedata-associa-i hypothesisis retainedfor eachclusterso thata= 0.5respondsto the maximum likelihood zero-scanfilter.
.e density-varianceproduct was varied by increasingth q andr the sameamount.The resultsof this simula-a are summarized in Table II. Each data point‘marizesresultsover 10 Monte Carlo runsat 10 time~rvals,or a total of 100 comparisonsbetweenthe true
~etlocationsandthe estimatedtarget locations.Therenot appearto be anyerror trendswith time for theses for the abovevalues of PD, fNT’ etc. exceptfor an~ in falsetargetswith time. -
•~sthedensity-varianceproductincreases,the difficultytnaking data-to-targetassociationincreases.This diffi-:y causesan increasein the numberof hypothesesfora 0.01 filter. The effect of more drastic pruning0.1) reducesthe numberof hypotheses.Increasesindensity-varianceproductdo not appearto increasetheriber of hypothesesfor the heavily prunedcases(a=
anda= 0.5). The percentof targetstracked(ratio ofrect tracks to true numberof targets)appearedquiteId for the first case;however,as the density-varianceduct increasedor as more hypotheseswere pruned,percentagedropped.Thepercentof falsetargets(ratio
‘alse tracks to total numberof tracks)remainedmod-
TABLE IIREsuI.rsoeMo~raC~iu.oSIMUL&TION
Case Number 01HypothesesPercentTargetsTracked
P~centFalse
Targets
NormalizedError
r ~ff04 ~001.0.01)
10.52 97.3 2.9 0.920
g.r.004 a 11iID 0. ii) 7.67 97.1 3.8 0.922
• r P0.04 a ~0,5•11Oi) 4.40 81.0 0.6 0.870
q.r.0.12, a 0.01tP003
13.65 93.6 6.7 1.053
q.r.0.i2. 0.0.iID ~ 8.04 92.6 0.0 1.052
g.r.0.i2,a P0.5ID. 0.03) 4.40 75.4 7.0 1.062
q.r.O.i2, a .0.01(P •0.fl i6.41 89.1 7.7 1.055
q.r.0.4, a .0.1I~ 0. 11
7.90 85.2 11.8 1.071
q.r.0.4, a .1150.1) 4.40 75.0 0.5 1.043
q.r.0.04,a 0.1ID ~
0.OIItHl9hli~r~i)
7.76 99.3 5.8 0.937
q.r.0.i2~ a ~(P -0.151 tHigh
3NT~
8.05 94.3 6.2 1052.
q.r.0.4. a ~Q.1
(P.O.iIUhighb~1
17.81 90.8 12.1
—
L~
eratefor all conditions.Under all conditions,the normal-~22~ ized error (half the averagesquaredposition error in-“ / verselyweightedby the filter’s estimatedvariancein posi-
tion) was approximatelyequalto one,indicating that theactual accuracyof the filter agreedwith the accuracypredictedby the filter. The filter was neitheroverconfi-dentnorunderconfident.
All of the filter parametersare well-defined andmeasurablequantitiesexceptthe new targetdensity fiNT’which is scenario-dependent.A value of fiNT should bechosenbasedupon the expectedrangeof targetdensitiesand the relative importancethe user assignsto missingreal tracks versuscreatingfalse tracks. The higher I
3NT’
the lesslikely the algorithmwill miss a real targetbut themore likely it will create a false track. The last threeentriesin Table II are for the casewherethe valueof fiNTused by the filter is twice what it should have beenaccordingto (22).
To presentresultsof otherfactorswhich affect perfor-mance(e.g.,PD,fNT, and$~.//3~-,.)would undulyincreasethe size of this paperand will not be doneexceptto saythat decreasesin F1, andfNT and increasesin fl,-,~/fliTreduce performance. Also, the percentageof targetstrackedand the numberof false tracks are functionsofthe scannumberfor valuesof ~D’ JNT’ andflfl’/$iT notusedin this simulation.
The algorithmwas codedin 1 500 lines of Fortranandexecuted on a UNIVAC 1100 computer. Each of thesubroutinesshownin Fig. 1 took approximately300 linesof Fortran,with the main programandothersubroutinestaking another300 lines. The core memoryrequirementsfor an algorithm capableof handling 10 clustersand 30targets(andincluding the MonteCarlo programfor gen-
o Ph?2
6. Theprobabilityof correctandincorrectdataassociationversusmeasurementdensityx variance.
854 IEEE TRANSACTIONS ON AUTOMATIC coN~raoL,voL. AC-24, o.ao. 6, DECEM~J~~IEEE fl
eratingmeasurementsandevaluatingthe algorithm) wasapproximately64K words. Ten Monte Carlo runs of 10scanseachwere executedin 25—45s dependingupon theparticular case.To handlemoreclustersand targets,or toreducememory requirements,the clusterandtargetinfor-mation could be put on a disk file. However,disk accesstime would then cause a large increase in the overallexecutiontime of the program.
IX. CONCLUSIONS
This paper has developed a multiple-target trackingfilter incorporatinga wide rangeof capabilitiesnot previ-ouslysynthesized,including trackinitiation, multiple-scancorrelation,andthe ability to processdata setswith falseor missing measurements.The primary contribution is aBayesianformulation for determiningthe probabilitiesofalternativedata-to-targetassociationhypotheses,whichpermitted this synthesis. In simulations of a simpleaircraft tracking problem,the filter demonstratedits capa-bilities overawide rangeof targetdensitiesandmeasure-ment uncertainties.The filter provedto be robustto errorsin the given filter parameters(e.g., unknowntarget den-sity).
ACKNOWLEDGMENT
The authorwould like to thank Dr. H. R. Rauch,Mr.R. 0. Bryson,and the reviewersfor their helpful sugges-tions.
REFERENCES
El) R. A. Singer,R. G. Sea,andK. B. Housewright.“Derivation andevaluationof improvedtracking filters for usein densemulti-targetenvironments,” IEEE Trans. Inform. Theory, vol. IT.20, pp.423—432,July 1974.
[2] Y. Bar-Shalomand E. Tse, “Tracking in aclutteredenvfr0~~with probabilistic data association,” Automatica, vol.451—460, 1975.
[3) Y. Bar.Shalom. “Extension of the probabilisitc data assocja~j~filter in multi-target tracking,” in Proc. 5th Symp. onEstimation,Sept. 1974, pp. 16—21.
[4] D. L. Aispach, “A Gaussiansum approachto theidentification-trackingproblem,‘ Automatica,vol. 11, pp. 285~2%1975.
[5] R. W. Sittler, “An optimaldataassociationproblemin surveillantetheory,” IEEE Trans. Mi!. Electron., vol. MIL.8, PP. 125— 139Apr. 1964.
[6] J. J. Stein andS. S. Blackman,“Generalizedcorrelationof mui~.target trackdata,” IEEE Trans. Aerosp. Electron. Syst.,vol. AEs.Il, pp. 1207—1217,Nov. 1975.
[7) P. Smithand0. Buechler,“A branchingalgorithmfor discrin~at1mg andtracking multiple objects.”IEEE Trans. Automat.Cont,,vol. AC-20. pp. 101—104, Feb. 1975.
[8] C. L. Morefield. “Application of 0—I integer Programmj,j1~8tomultitarget trackingproblems,”IEEE Trans. Automat.Conir., vol.AC-22, pp. 302—311,June1977.Y. Bar-Shalom.“Tracking methodsin amultitargetenvironmeta.’.IEEE Trans.Automat.Conir., vol. AC-23,pp. 618—626,Aug. 1978,D. L. AlspachandH. W. Sorenson,“RecursiveBayesianestima.tion usingGaussiansums,”Automatica, vol. 7, 1971.R. E. Kalman,“A new approachto linear filtering andpredictionproblems,”J. Basic Eng., vol. 82-D, pp. 35—45, 1960.D. B. Reid, “A multiple hypothesisfilter for tracking moltipletargetsin a clutteredenvironment,”LMSC Rep.D-560254,Sept.1977.
Donald B. Reid (S’69-M’72)wasbornOn March29, 1941,.in Washington,DC. He receivedtheB.S. degreefrom the U.S. Military Academy,West Point, NY, in 1963 and the MS. andPh.D. degreesin aero& astronauticalengineer.ing from StanfordUniversity, Palo Alto, CA in1965 and1972, respectively.
From 1965 to 1969 heservedin theU.S. AirForce as an Astronautical Engineer in the6595th AerospaceTest Wing at VandenbergAFB andparticipatedin thetestingandlaunch
operationsof military spaceprograms.He wasamemberof thetechnicalstaffat the Institute for DefenseAnalysesin Arlington, VA, from 1972to 1976. Since July 1976 he has beena scientistwith the Palo AltoResearchLaboratoryof Lockheed Missiles & Space Company. Hiscurrentinterestsincludemultiple targettraëking,orbital rendezvousandstation keeping,systemidentification, andmilitary commandandcon-trol systems.
[9)
[10)
[Ii)
[12]
Abstjnonfin4....
fold. 1noedineln~ertlI
.wSvs
whertmaflilV. .vfromfundandthere
thatTh
trols,Cle
put—6givenoneapp)! -
for aorigirtern
provi-rnan~
Th
MarPaperNonlir
TheQueen


















