IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY 1 …coejgyi/pdfs/IEEE_CST_2012.pdf · hicle...
14
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination. IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY 1 On the Stability and Agility of Aggressive Vehicle Maneuvers: A Pendulum-Turn Maneuver Example Jingang Yi, Senior Member, IEEE, Jingliang Li, Jianbo Lu, Senior Member, IEEE, and Zhaodu Liu Abstract—We present a dynamic stability and agility study of a pendulum-turn vehicle maneuver. Instead of optimizing the con- trolled inputs to mimic expert human driver performance, we focus on understanding the stability and agility performance of the ve- hicle motion using professional racing car driver testing data. We propose to use the rear side slip angle, rather than the vehicle mass center side slip angle, as one state variable to obtain the precise stable region. A hybrid physical/dynamic tire/road friction model is used to capture the dynamic friction force characteristics. We also introduce the use of vehicle lateral jerk and acceleration in- formation as the agility metrics to compare maneuvering perfor- mance under the racing car driver and a typical human driver. The analysis and testing results show that during the pendulum-turn maneuvers, the professional driver operates the vehicle outside the stable regions of the vehicle dynamics to achieve superior agility performance than that under typical human driver control. Com- parison results also show that the racing car driver outperforms in both the traveling time and the agility metrics. It is ongoing work to design a control strategy for autonomous aggressive maneuvers by using the new stability and agility results presented in this paper. Index Terms—Aggressive maneuvers, agility, nonlinear dy- namics, vehicle control, vehicle dynamics. NOMENCLATURE A unit-vector set of the body-fixed moving coordinate system. A unit-vector set of the Frenet coordinate system along the vehicle trajectory. Curvature (signed curvature) of the vehicle motion trajectory. Manuscript received August 23, 2010; revised December 06, 2010; accepted February 16, 2011. Manuscript received in final form February 24, 2011. Date of publication March 24, 2011; date of current version nulldate. Recommended by Associate Editor K. Y. Pettersen. A preliminary version of this paper was presented in part at the 2009 ASME Dynamic Systems and Control Conference, Hollywood, CA, October 12–14, 2009, and the 2010 ASME Dynamic Systems and Control Conference, Cambridge, MA, September 13–15, 2010. The work of J. Yi was supported in part by the U.S. National Science Foundation under Grant CMMI-0856095 and by CAREER Award CMMI-0954966. The work of J. Li was supported by a Fellowship from the Chinese Scholarship Council. J. Yi is with the Department of Mechanical and Aerospace Engineering, Rut- gers University, Piscataway, NJ 08854 USA (e-mail: [email protected]). J. Li was with the Department of Mechanical and Aerospace Engineering, Rutgers University. He is now with the School of Mechanical and Vehicular Engineering, Beijing Institute of Technology, Beijing 100081, China (e-mail: [email protected]). J. Lu is with the Global Vehicle Dynamics, Driver Assistance, and Active Safety Research and Advanced Engineering, Ford Motor Company, Dearborn, MI 48121 USA (e-mail: [email protected]). Z. Liu is with the School of Mechanical and Vehicular Engineering, Beijing Institute of Technology, Beijing 100081, China (e-mail: [email protected]). Color versions of one or more of the figures in this paper are available online at http://ieeexplore.ieee.org. Digital Object Identifier 10.1109/TCST.2011.2121908 The front and rear tire forces in the wheel plane frame. The vehicle mass center velocities in the body frame. The vehicle mass center acceleration in the body frame. The vehicle mass center jerk in the body frame. Instantaneous jerk (acceleration) agility metric at location . Aggregated jerk (acceleration) agility metric over arclength . The front and rear tire angular velocities. The front and rear tire slip ratios. The front and rear tire slip angles. Vehicle’s yaw angle and yaw angular rate. Front wheel steering angle. Vehicle side slip angle. Vehicle side slip angle variable . The total mass of the vehicle. The mass moment of inertia of the vehicle system around the -axis at the mass center. The gravitational constant m/s . Distances between the front and rear wheel contact points and the vehicle mass center. Distances between the left and right wheel contact points and the vehicle mass center. I. INTRODUCTION E XTREMELY skilled human drivers such as professional racing car drivers demonstrate superior capability to con- duct seemingly unstable yet safe vehicle maneuvers. These ex- tremely aggressive maneuvers can be used for designing new active safety features to handle vehicles under unstable motion, particularly in emergency situations such as high-speed obstacle avoidance and skidding on icy roads. The unstable motion of a vehicle in these aggressive maneuvers is mainly due to the fact that the forces of certain tires reach or pass saturation (peak) points. The controlled utilization of the tire force capacity by expert human drivers improves maneuvering agility. The goal of this paper is to study dynamic stability and agility of these aggressive vehicle motions by professional drivers, particularly a pendulum-turn aggressive maneuver. Studying aggressive maneuvers of robotic vehicles has drawn attention in recent years. Most existing work however focus on unmanned aerial vehicles [1]–[6] and there are few reported 1063-6536/$26.00 © 2011 IEEE
Transcript of IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY 1 …coejgyi/pdfs/IEEE_CST_2012.pdf · hicle...

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY 1
On the Stability and Agility of Aggressive VehicleManeuvers: A Pendulum-Turn Maneuver Example
Jingang Yi, Senior Member, IEEE, Jingliang Li, Jianbo Lu, Senior Member, IEEE, and Zhaodu Liu
Abstract—We present a dynamic stability and agility study of apendulum-turn vehicle maneuver. Instead of optimizing the con-trolled inputs to mimic expert human driver performance, we focuson understanding the stability and agility performance of the ve-hicle motion using professional racing car driver testing data. Wepropose to use the rear side slip angle, rather than the vehicle masscenter side slip angle, as one state variable to obtain the precisestable region. A hybrid physical/dynamic tire/road friction modelis used to capture the dynamic friction force characteristics. Wealso introduce the use of vehicle lateral jerk and acceleration in-formation as the agility metrics to compare maneuvering perfor-mance under the racing car driver and a typical human driver. Theanalysis and testing results show that during the pendulum-turnmaneuvers, the professional driver operates the vehicle outside thestable regions of the vehicle dynamics to achieve superior agilityperformance than that under typical human driver control. Com-parison results also show that the racing car driver outperforms inboth the traveling time and the agility metrics. It is ongoing work todesign a control strategy for autonomous aggressive maneuvers byusing the new stability and agility results presented in this paper.
Index Terms—Aggressive maneuvers, agility, nonlinear dy-namics, vehicle control, vehicle dynamics.
NOMENCLATURE
A unit-vector set of the body-fixed movingcoordinate system.
A unit-vector set of the Frenet coordinatesystem along the vehicle trajectory.Curvature (signed curvature) of the vehiclemotion trajectory.
Manuscript received August 23, 2010; revised December 06, 2010; acceptedFebruary 16, 2011. Manuscript received in final form February 24, 2011. Dateof publication March 24, 2011; date of current version nulldate. Recommendedby Associate Editor K. Y. Pettersen. A preliminary version of this paper waspresented in part at the 2009 ASME Dynamic Systems and Control Conference,Hollywood, CA, October 12–14, 2009, and the 2010 ASME Dynamic Systemsand Control Conference, Cambridge, MA, September 13–15, 2010. The workof J. Yi was supported in part by the U.S. National Science Foundation underGrant CMMI-0856095 and by CAREER Award CMMI-0954966. The work ofJ. Li was supported by a Fellowship from the Chinese Scholarship Council.
J. Yi is with the Department of Mechanical and Aerospace Engineering, Rut-gers University, Piscataway, NJ 08854 USA (e-mail: [email protected]).
J. Li was with the Department of Mechanical and Aerospace Engineering,Rutgers University. He is now with the School of Mechanical and VehicularEngineering, Beijing Institute of Technology, Beijing 100081, China (e-mail:[email protected]).
J. Lu is with the Global Vehicle Dynamics, Driver Assistance, and ActiveSafety Research and Advanced Engineering, Ford Motor Company, Dearborn,MI 48121 USA (e-mail: [email protected]).
Z. Liu is with the School of Mechanical and Vehicular Engineering, BeijingInstitute of Technology, Beijing 100081, China (e-mail: [email protected]).
Color versions of one or more of the figures in this paper are available onlineat http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TCST.2011.2121908
The front and rear tire forces inthe wheel plane frame.The vehicle mass center velocities in thebody frame.The vehicle mass center acceleration in thebody frame.The vehicle mass center jerk in the bodyframe.Instantaneous jerk (acceleration) agilitymetric at location .Aggregated jerk (acceleration) agility metricover arclength .The front and rear tire angular velocities.
The front and rear tire slip ratios.
The front and rear tire slip angles.
Vehicle’s yaw angle and yaw angular rate.
Front wheel steering angle.
Vehicle side slip angle.
Vehicle side slip angle variable .
The total mass of the vehicle.
The mass moment of inertia of the vehiclesystem around the -axis at the mass center.The gravitational constant m/s .Distances between the front and rear wheelcontact points and the vehicle mass center.Distances between the left and right wheelcontact points and the vehicle mass center.
I. INTRODUCTION
E XTREMELY skilled human drivers such as professionalracing car drivers demonstrate superior capability to con-
duct seemingly unstable yet safe vehicle maneuvers. These ex-tremely aggressive maneuvers can be used for designing newactive safety features to handle vehicles under unstable motion,particularly in emergency situations such as high-speed obstacleavoidance and skidding on icy roads. The unstable motion of avehicle in these aggressive maneuvers is mainly due to the factthat the forces of certain tires reach or pass saturation (peak)points. The controlled utilization of the tire force capacity byexpert human drivers improves maneuvering agility. The goalof this paper is to study dynamic stability and agility of theseaggressive vehicle motions by professional drivers, particularlya pendulum-turn aggressive maneuver.
Studying aggressive maneuvers of robotic vehicles has drawnattention in recent years. Most existing work however focus onunmanned aerial vehicles [1]–[6] and there are few reported
1063-6536/$26.00 © 2011 IEEE

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
2 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY
work of studying aggressive maneuvers of ground vehicles. Thisis partially due to the challenges of modeling, sensing, and con-trolling the complex tire/road interactions on which motion ofground vehicles heavily depends. In [7], [8], trail-braking andpendulum-turn cornering maneuvers by rally-racing drivers arestudied and an optimization approach is formulated to parame-terize the driver’s behavior. A complementary study [9] of thework in [8] considers steady-state properties of the corneringmaneuvers and concludes that understanding and control of ag-gressive vehicle maneuvers are challenging.
Motion stability is one of important characteristics for ag-gressive maneuvers. In [10], longitudinal stability under purelybraking maneuvers is analyzed through tire slip dynamics. Thelateral stability analyses in [11]–[14] consider the vehicle yawrate and mass center side slip angle dynamics under assump-tions of a constant longitudinal velocity and zero tire slip ra-tios. Due to the coupling between the longitudinal and lateraltire/road friction forces, in [15] we consider the influence ofthe tire slip ratios on lateral vehicle stability. It is shown thatincreasing tire slip ratio reduces the stable region of the ve-hicle motion. During aggressive maneuvers, vehicles are run-ning under rapidly changing conditions and we shall considerthe transient motion stability. Therefore, we use a hybrid phys-ical/dynamic friction model in [16] to capture the dependenceof friction forces on various running conditions.
Pendulum-turn maneuver is a high-speed sharply corneringstrategy that is used by racing car drivers [7], [17]. The maneu-vering strategies during the pendulum turn include not only thecoordinated and optimized actuation among braking/tractionand steering, but also coordinated forces distribution amongfour tires and along longitudinal/lateral directions at each tire.We take pendulum-turn cornering strategy as one example tostudy aggressive maneuvers. Instead of optimizing the con-trolled throttle, braking and steering inputs to mimic the humanperformance [7], [8], we focus on fundamentals of vehiclemotion stability and agility of the aggressive maneuvers.
The rationale for this study is twofold. First, from testing dataof pendulum-turn maneuvers, we observe that even under twodifferent sets of coordinated braking/acceleration and steeringactions, the vehicle motion can be qualitatively similar. There-fore, we shall take a different viewpoint to understand under-lying dynamic properties that represent these aggressive maneu-vers. Second, most existing safe vehicle controllers (e.g., [18],[19]) assume that the vehicle motion should be kept within thestable region of the vehicle dynamics. However, as we will showlater in this paper, the testing data of the professional racingcar driver demonstrate that the vehicle is often operated outsidethe stable regions of its dynamics for superior agility perfor-mance. Therefore, understanding the stability and quantifyingagility of the vehicle motion by these expert drivers will providethe knowledge for designing new vehicle control strategies. Al-though the testing data are from pendulum-turn maneuvers, theapproaches and analyses in this paper can be applied to otheraggressive maneuvers.
The main contributions of this paper are the new stabilityresults and the new agility metrics for aggressive vehicle ma-neuvers. We propose to use the rear side slip angle to preciselycapture vehicle stability. We analyze and demonstrate the new
modeling framework. We also analyze the coupled longitudinal/lateral vehicle motion stability with consideration of compre-hensive operating conditions, while most existing work neglectinfluences of tire slip and dynamic load-shifting on vehicle sta-bility. The comparisons of racing car driver testing data and typ-ical human driver simulations reveal that the unstable drivingstrategies are employed by racing car drivers and thus can beused for designing new superior-agility vehicle controllers. Wefor the first time use the lateral jerk and acceleration informationof the vehicle motion as the agility metrics to quantify the ve-hicle maneuver performance. The new agility metric is inspiredby the work in [6], [20]. We extend the developments in [6] byconsidering the vehicle motion characteristics, and also providean analytical interpretation for the experimental results in [20].The results presented in this paper also complement the devel-opments in [7], [8] by providing a dynamics-oriented analysisframework for aggressive vehicle maneuvers.
The rest of this paper is organized as follows. We first reviewbasic vehicle and tire models in Section II. We then discuss thevehicle stability and agility metrics in Section III. We focus theexperimental testing study in Section IV. We present the sta-bility and agility comparison results in Section V before con-cluding the paper in Section VI.
II. VEHICLE DYNAMICS MODELING
A. Vehicle Dynamics Models
Fig. 1 shows the schematic diagram of the vehicle model. Weconsider a planar motion of the vehicle system. Without lossof generality, we consider a motion in which the front wheel isbraking and the rear wheel is in traction as shown in Fig. 1.1 Itis straightforward to obtain the motion equations of the vehiclesystem as follows [21]:
(1a)
(1b)
(1c)
where we use notation and for thesteering angle and the frictional forces ,
, . We define the variable, and for the front and rear wheel slip angles,
we obtain the estimates
(2)
Using and its derivative and (1), we obtain
(3a)
(3b)
(3c)
where yaw angular rate .
1For other cases, we shall obtain the same equations by defining the positive(negative) tire/road traction (braking) forces.

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
YI et al.: ON THE STABILITY AND AGILITY OF AGGRESSIVE VEHICLE MANEUVERS 3
Fig. 1. Schematic of vehicle model.
We consider the dynamics of rear side slip angle . From (2),we obtain . Pluggingthe dynamics (3) into the above equation, we have
(4)
The main difference of the dynamics (4) with vehicle sideslip angle dynamics (3b) is the influence of the steering angle. This can be clearly seen from (2) that the steering angle has
a direct relationship with the side slip angle (i.e., ) through(and therefore front tire forces), while such influence rela-
tionship is not directly shown in calculation. Because of thisconsideration, in industrial practice, the rear slip angle , ratherthan side slip angle , is typically used as a specification to char-acterize the stability of the vehicle motion. We use as onestate variable to study vehicle stability.
Remark 1: By neglecting the longitudinal dynamics andusing small angle approximations with (constant),from (3) we obtain the same nonlinear vehicle lateral dynamicsin [11]–[13], [18] as follows:
(5a)
(5b)
Similarly, if we consider a small angle approximation to (4) withfor vehicles such as the Ford Explorer
testing vehicle with parameters shown in Table II, we obtain thesimplified dynamics of as
(6)
Comparing (5a) and (6), we clearly see that the front tire lateralforce directly affects dynamics, while it has no directinfluence on dynamics.
B. Tire/Road Friction Modeling
Vehicle motion heavily depend on tire/road friction forces.The tire/road friction forces are related to longitudinal slip ratiosand normal loads at each tire. For the front and rear wheels, thelongitudinal slip ratios are defined as
respectively. We use the kinematics relationshipin the above calculation. Due to the lateral and longitudinal
accelerations, the load shifting can be obtained as
where and . We define the longitu-dinal load shifting variable as the ratio (in percentage) ofthe total shifting load due to longitudinal acceleration andthe vehicle weight, namely
We use the hybrid physical/dynamic friction model in [16]to capture the complex tire/road friction forces. The hybridphysical/dynamic model takes advantages of both physical andLuGre dynamic friction models. The model uses the physicalmodel-based contact patch partition, while the steady-statebristle deformation and stress/force distribution on the contactpatch is calculated by the LuGre dynamic friction model. Be-sides preserving the attractive properties from both physical anddynamic friction models, an additional advantage of the hybridmodel is its property of bridging the LuGre model parameters,which are difficult to measure and obtain, with the measurablephysical model parameters. The hybrid model captures thevelocity dependency and longitudinal/lateral coupling effectsof the friction forces in a compact form. In [16], we also use thehybrid model to resolve unrealistic results of non-zero bristledeformation (stress) at the trailing edge of the contact patchthat results from a typical LuGre dynamic friction model.
Assuming a zero tire camber angle and a rectangular contactpatch with a size of (length) and (width), we setup acoordinate system shown in Fig. 2. We partition the contactpatch into an adhesion region and a sliding region
, where a critical length . We define ,, and let denote the normal load on the
tire. We consider a parabolic contact pressure distribution (perlength) , where
is the maximum pressure, the total normal force, and . The distributed
LuGre dynamic model for the tire/road friction is given as
(7a)
(7b)

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
4 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY
TABLE IHYBRID PHYSICAL/DYNAMIC FRICTION MODEL PARAMETERS
Fig. 2. Schematic of tire motion kinematics and contact patch geometry.
where is the deformation of the bristle at location andtime , , , , and are the bristle elastic stiff-ness, viscous damping coefficient, and sliding damping coeffi-cient per unit length, respectively. For relative velocity
, we have ,where is the Stribeck velocity, and are Coulomb andstatic friction coefficients, respectively. We use a dimension-less variable in (7) to repre-sent the effect of the normal load on the bristle deformation.Let and
. The longitudinal friction forceat the steady state is then [16]
(8)
where is the solution of for a given .For the 2-D case, the distributed LuGre friction model is sim-
ilarly obtained and the steady-state forces are obtained as [16]
where , and is the solutionof ,
, is the magnitude of the
relative velocity, and .Fig. 3 shows an example of the steady-state friction forceas functions of longitudinal slip with zero slip angle and
25 m/s. The hybrid friction model parameters for Fig. 3are obtained by comparing with experimental data and validatedin the CarSim simulation.2 These model parameters are listed inTable I. We also compare the predictions of the hybrid phys-ical/dynamic friction model with the “magic” formula [22] asshown in Fig. 3 under various normal loads. Clearly, the hybridmodel predicts the friction forces accurately.
2[Online]. Available: http://www.carsim.com/
Fig. 3. Comparison of longitudinal force � of the hybrid physical/dynamicmodel with the “magic” formula under various normal loads.
Remark 2: Due to the page limit, we only show the predictionsof the longitudinal frictionforcesbyusingthehybridphysical/dy-namic friction model and the “magic” formula under zero tire slipangle. We have conducted comparison studies under nonzero slipangles and the two models predict the similar performance [15].A more comprehensive comparison study for a similar LuGredynamic friction model has also been reported in [23].
III. VEHICLE MANEUVER STABILITY AND AGILITY
In this section, we first define the vehicle maneuver stabilityand discuss how to determine the stability under a set of givenvehicle motion states. We then discuss the maneuver agility andpresent several agility metrics.
A. Maneuver Stability
We define the vehicle maneuver stability as follows.Definition 1: The vehicle maneuver stable region is defined
as the domain of attraction of the nonlinear dynamical systems(3c) and (4) ( and as the state variables) under the givenvehicle motion and inputs. The vehicle maneuver is stable ifthe vehicle motion states at that time are located within the ma-neuver stable region.
The above maneuver stability definition is similar to these in[11]–[13], [18] but we here use instead of as one statevariable. Moreover, we use the hybrid physical/dynamic fric-tion model in Section II-B for stability analysis and calculation.Fig. 4 shows some properties of the dynamics. Fig. 4(a)illustrates the stable region of dynamics with steeringangle . We observe the following facts from the phaseportraits: 1) there exist one single stable point (at origin) andtwo symmetric unstable saddle points under zero steering angle.A stable region is around the stable equilibrium; 2) when thesteering angle is non-zero, the stable equilibrium is no longer

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
YI et al.: ON THE STABILITY AND AGILITY OF AGGRESSIVE VEHICLE MANEUVERS 5
Fig. 4. (a) Yaw rate versus rear slip angle � � � phase portraits underzero steering angle � � �. (b) Equilibria trajectory when the steering angleis changing. The circles “�” show the stable equilibria and the empty squares“ ” show the unstable saddle equilibria. The bifurcation point starts at the firstsolid square point as indicated with critical steering angle � . The (unstable)equilibria of the systems then follow the solid square points “ ” afterwards.
at origin and indeed, it moves towards to saddle point #1 asshown in Fig. 4(a). At a critical steering angle , the stableequilibrium will merge with the unstable saddle equilibrium andthen there is no stable region. This bifurcation phenomenon oc-curs also for dynamics [11]. Fig. 4(b) further showsthe trajectory of the equilibria under the change of the steeringangle . In Fig. 4(b), we plot the stable equilibria (solid circles),saddle equilibria (empty squares), and unstable equilibria (solidsquares) after the bifurcation occurs (at the first solid square).The critical steering angle is around 3.3 degs.
Remark 3: The stable regions of the vehicle motion shown inthis section are numerically computed from nonlinear systems(3c) and (4) ( dynamics). It is possible to obtain thefurther analytical stability results shown in Fig. 4 by using (5)and (6) with a piecewise linear model for lateral tire/road frictionforces [24]. The detailed analysis is out of the scope of this paperand we will report in the future work.
Fig. 5. Phase portraits of � � � for two slip values and zero steering angle� � �. (a) � � � � � and a large stable region around the origin. (b)� � � � ��� and a significantly reduced stable region.
B. Maneuver Stability Analysis
The complexity of vehicle stability analysis comes from sev-eral sources. First, many kinematic and kinetic variables affectfriction forces and , . These variables includethe tire slip ratios , slip angles , steering angle , andtire normal load , etc. Capturing the dependency of fric-tion forces on all of these variables into one mathematical modelis challenging. Second, the nonlinear function relationship be-tween and and aforementioned variables are compli-cated. The coupling effect between and further increasesthe complexity of the dynamical systems. In the following, wefirst illustrate the dependence of the maneuver stability on ve-hicle operating conditions and then discuss how to determinethe stability at any given set of vehicle motion states.
Due to the coupling effects, the longitudinal tire slip ratioaffects the maneuver stability. Fig. 5 shows the phaseportraits under two slip ratios with and .The phase portraits clearly show that under non-zero slip ratiosthe stable region around the equilibrium point

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
6 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY
Fig. 6. Four example plots of stable/unstable regions changing with (a) steering angle �, (b) vehicle longitudinal velocity � , (c) tire longitudinal slip � � � �
� , and (d) longitudinal load shifting �� . The stable regions are the 3-D areas between the two surfaces in each figure.
becomes much smaller [see Fig. 5(b)] comparing with the caseof zero slip ratios [see Fig. 5(a)]. Fig. 6 further shows the stableregions of dynamics under changing steering angles ,longitudinal velocities , slip ratios , and longitudinal loadshifting . In Fig. 6, any points in the 3-D regions above thetop surface and below the bottom surface are unstable, whilethose points in the regions between these two surfaces are stable.In each sub-figure of Fig. 6, we vary only one variable and fixother three variables. The nominal values of , , and arezero and for , the nominal value is 25 m/s.
We summarize the observation from these plots as follows: 1)changing steering angle from zero will make the stable regionasymmetric around the origin ; see Fig. 6(a).Moreover, up to the critical steering angle , bifurcation oc-curs and therefore the stable region is a closed volume in thestate space; 2) increasing vehicle velocity will reduce the stableregion [see Fig. 6(b)]; 3) as we illustrated in Fig. 5, the longitu-dinal tire slip has significant influence on the stable region. Thisis further demonstrated in Fig. 6(c) that increasing slip ratiowill reduce the stable region; and 4) from Fig. 6(d), vehicle de-celerating (i.e., changing ) will reduce the stable region dueto the dynamic load shifting.
To determine stability at any arbitrary vehicle operating state,we first compute the stability surfaces shown in Fig. 6 and thendetermine where the vehicle operating point is located relativeto the stability surfaces. If the vehicle states are located in thestable region between the stability surfaces, then the motion isstable; otherwise, it is unstable. If the stability surface does not
exist, then the vehicle motion is unstable. We use this computa-tional approach to determine the vehicle stability.
Remark 4: In Fig. 6(c) we show the stable region under thesame front and rear slip values (e.g., ) for presenta-tion convenience and easy visualization of stability surfaces.For testing and CarSim simulation of aggressive maneuvers, thefront and rear tire slip ratios are not the same and we use the ac-tual front and rear slip ratios to calculate the stable regions. Weconsider the tire friction forces under the actual slip ratios in(3c) and (4) to compute the stable regions.
C. Maneuver Agility and Agility Metrics
We borrow the agility concept for aircraft maneuvers [25].We define the vehicle maneuver agility by the physical proper-ties of the vehicle which relate to its ability to change, rapidlyand precisely, its motion path or heading axis and to its easeof completing that change. The definition of maneuver agilityhere is comprised of vehicle maneuverability (i.e., the ability tochange magnitude and direction of the velocity vector) and con-trollability (i.e., the ability to change the maneuver state throughrotation about the center of gravity by a change of control power,etc.) The maneuver agility defined here can be considered as anextension to driving qualities.
To quantify agility performance for aggressive maneuvers,we use: 1) lateral jerk (the derivative of acceleration vector)magnitude and 2) relative lateral acceleration (defined as theratio of the lateral acceleration magnitude and the maximum ac-celeration). The former metric is an absolute agility quantity and

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
YI et al.: ON THE STABILITY AND AGILITY OF AGGRESSIVE VEHICLE MANEUVERS 7
the latter is to quantify relative maneuver agility. Note that bothmetrics can be calculated in short-time scale to quantify the tran-sient agility or longtime scale (e.g., 10-20 s) as functional agilitymetrics for any particular aggressive maneuvers.
1) Lateral Jerk Metric: Consider the vehicle motion trajec-tory shown in Fig. 1. In the Frenet frame, the jerk of the vehicleis calculated as [6]
(9)
where are the tangent, normal, and binormal vec-tors, respectively, and and are the curvature and torsionof the trajectory, respectively. Note that non-negative curvature
in (9), and the signed curvature for coun-terclockwise turns and for clockwise turns.
For planar vehicle motion, torsion , (9) becomes
(10)
where is defined as axial agility andis defined as curvature agility [25]. To transform the
formulation (10) into the vehicle body frame, we need to find outthe relationships between the Frenet frame and the body frame,which depends on the trajectory turning directions as follows:
(11)
where function for and for. Plugging (11) into (10), we obtain
We define the magnitude of the lateral jerk as the transient agilitymetric , namely
(12)
and the functional agility (over a distance ) as
(13)
As an alternative to (12), we can use vehicle kinematics tocalculate the agility metric . We denote the vehicle’s ac-celeration in the body frame as attime and location . It is straightforward to obtain the jerkvector in the body frame as
(14)
and therefore
(15)
We show that the formulation (14) is the same as (12) and there-fore the agility formulations (12) and (15) are equivalent.
Proposition 1: The jerk formulations (12) and (14) are equiv-alent.
Proof: See the appendix.Remark 5: To see a physical interpretation of the agility
metric , we consider a case of a circular trajectory,namely, . If we further consider a constant longitudinalvelocity, , then (12) becomes .This calculation implies that a larger side slip angle (e.g.,
Fig. 7. Vehicle trajectory of a pendulum-turn maneuver from racing drivingexperiments.
maneuvers by racing car drivers) will produce a larger lateraljerk, namely, large agility. When the side slip angle is small(e.g., maneuvers by typical human drivers, ), then (12)becomes and a linear relationshipis established between and rate of curvature, namely,
. Such a proportional relationship has been reportedin [20] by the experiments without analytical justifications.
Remark 6: It is interesting to notice that in [20] the lateraljerk is shown proportional to the longitudinal acceleration
from the experimental data. The lateral jerk informationis then used in [20] as a critical variable and an indicator forintegrated longitudinal/lateral motion control by human drivers.From the agility calculation in (12), we show that the lateraljerk is a combination of the axial and curvature agilities. Indeed,the agility is the inner product of the jerk vector and theunit vector along the velocity direction in the body frame. Theagility metric (12) thus captures the coordinated and combinedaxial/curvature agilities of vehicle motion.
2) Relative Lateral Acceleration Metric: We define the ratioof the magnitude of the lateral acceleration and the max-imum lateral acceleration as a relative acceleration agility metric
(16)
The use of is to quantify the motion agility of utiliza-tion of the tire/road friction capacity. The metric onlyquantifies the absolute motion agility and does not indicate theutilization of the limits of tire/road friction capacity. Therefore,we introduce to complement the agility metric .For example, during low- (friction) driving maneuvers, the ratechange of cornering acceleration is usually smaller than that inhigh- driving. This leads to a small , and canstill be large to indicate relative high agility. Hence those twoagility metrics together provide better characterization than ei-ther of them alone. Similarly, we define an accumulated func-tional metric over a distance as
(17)
IV. PENDULUM-TURN MANEUVERS: EXPERIMENTS AND
CARSIM SIMULATIONS
In this section, we first present the pendulum-turn maneuverexperiments. We then compare the CarSim simulation resultswith experimental results of the pendulum-turn maneuver.

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
8 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY
Fig. 8. Testing data at four tires. (a) Longitudinal friction forces � . (b) Lateral friction forces � . (c) Normal loads � . (d) Tire slip ratios �. (e) Tire slip angles� and vehicle side slip angle �. (f) Vehicle pitch and roll angles.
A. Pendulum-Turn Maneuver Experiments
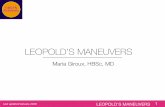
The pendulum-turn maneuver experiments were conductedat the Ford research facilities by professional racing car drivers.Fig. 7 shows the vehicle trajectory for a sharp pendulum turn.The testing vehicle is a Ford Explorer SUV and the vehiclewas instrumented with various sensors. Since we do not haveaccess to GPS positioning data, we use an extended Kalmanfilter to estimate the vehicle’s position information by fusing
the acceleration information with the velocity measurements[26]. From the collected sensor measurements and vehicleparameters provided by Ford, we calculate the tire slip ratiosand angles and then estimate the friction forces at each tireusing the hybrid physical/dynamic friction model discussed inSection II-B.
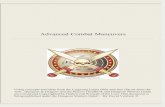
Fig. 8(a)–(c) show the three-directional tire/road frictionforces at four tires. Fig. 8(d) and (e) show the longitudinalslip ratios and tire slip angles, respectively. The vehicle pitch

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
YI et al.: ON THE STABILITY AND AGILITY OF AGGRESSIVE VEHICLE MANEUVERS 9
Fig. 9. Racing car driver input data. (a) Steering angle � and yaw rate � . (b) Normalized throttle/braking actuation.
Fig. 10. Comparison of simulation results and testing data. (a) Longitudinal/lateral velocity � �� . (b) Longitudinal/lateral acceleration � �� . (c) Yawrate � . (d) Vehicle side slip angle � and tire slip angles � and � .
and roll angles are shown in Fig. 8(f). The driver steering,braking/traction inputs, and the vehicle yaw rate are shown inFig. 9. The vehicle motion variables such as longitudinal/lateralvelocity and accelerations are shown in Fig. 10.
During the pendulum-turn maneuver, the driver first usedcounter-steering at the beginning of the turn around 4
s [see Fig. 9(a)] and then a “throttle blip” action was takenduring the turn, namely, an applied throttle command around
6 s in between two braking actions around 5 s and6.5 s, respectively; see Fig. 9(b). At the same time when
the throttling was applied, the driver turned the steering tothe cornering direction aggressively and turned it back around

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
10 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY
TABLE IITESTING VEHICLE PARAMETERS
9 s after the second brake command. It is interesting tonote that the driver took advantage of dynamic load shiftingand wheel locking as shown in Fig. 8. For example, the driverused braking and locking the front wheels (around 7.5 s)to generate: 1) a large longitudinal deceleration and 2) a largelateral acceleration [see Fig. 10(c)]. This driving strategy shiftsthe normal load between not only the front and rear tires butalso the left and right tires; see Fig. 8(c) for large normal loads
at front and rear right tires with small normal forces at frontand rear left tires. The load shifting can also be observed fromvehicle pitch and roll angles shown in Fig. 8(f). As a resultof load shifting and rapidly changing [see Fig. 8(d)] and[see Fig. 8(e)], large lateral tire/road frictions are generated atright-side tires, while very small forces at left-side tires [seeFig. 8(b)]. Thus, it produces a large vehicle side slip angle[see Fig. 8(e)] and increases agility around 8 s.
B. CarSim Simulation and Comparison
To reproduce the vehicle motion and compare with othertypes of human driver models, we simulate the vehicle motionby using the CarSim simulation package with the steering,throttle and braking actuation of the racing car driver as inputs.Table II lists some parameters for the testing vehicle. We usethe hybrid physical/dynamic tire/road friction model in thesimulation with parameters listed in Table I. Fig. 10 shows anexample of the CarSim simulation comparison results of thelongitudinal and lateral velocity/acceleration, yaw rate, and tireand side slip angles. The simulation results in general matchwell with the testing data. We observed the similar matchingresults for other motion and force variables.
The above validated simulation results confirm that we canuse the CarSim vehicle and hybrid tire/road friction model to ac-curately predict vehicle motion and therefore to compare perfor-mance of the professional racing car drivers with other humandriver models.
V. COMPARISON STUDY: RACING CAR DRIVERS AND TYPICAL
HUMAN DRIVERS
In this section, we compare the maneuvering performance ofthe racing car driver and a typical human driver on the sametrack shown in Section IV. We first discuss the human drivermodel that is used for comparison and then we focus on themaneuver stability and agility comparisons.
A. Human Driver Models and Comparisons
We take a typical human driver model in [27] for comparisonstudy. The human driver model in [27] is built on an optimal pre-view control mechanism for path-following and has been vali-dated with experiments and implemented in CarSim. To use thishuman driver model, the longitudinal vehicle velocity profile
has to be provided as one input. We generate the longitudinalvelocity profile by using the method described in [28]. The ve-locity profile given in [28] is designed for modeling racing cardrivers and therefore can be considered as a fast velocity pro-file by human drivers. The generated velocity profile incorpo-rates lateral acceleration limits , vehicle braking limit,as well as longitudinal acceleration limit . Given thecoupling between longitudinal and lateral accelerations, we usethe magnitude of maximum longitudinal acceleration asthe parameter to capture aggressiveness levels of human drivers.
Fig. 11(a) shows the simulated vehicle trajectory underthe human driver model with 3 m/s , whileFig. 11(b) and (c) show the comparison results of rear slipangles and yaw rates by the racing car driver and the humandriver model. It is interesting to notice that under a typicalhuman driver, the rear side slip angle is much smaller (max-imum less than 5 degs) than these by the professional racingcar driver (maximum around 25 degs) though the maximummagnitudes of the yaw rate are comparable. This observationis consistent with the agility analysis discussed previouslyand also supported by the agility metric calculations shownin Section VI. We also note that with a higher (e.g.,
3 m/s ), the vehicle performs a similar trend of asthose by the professional driver, with a counter-steering actionaround the location 100 m .
B. Maneuver Stability Comparisons
We consider the motion stability at any instantaneously time.We analyze the local stability of the nonlinear systems (3c) and(4) around the any operating point as discussed in Section III-A.
Fig. 12 illustrates the stability of the vehicle motion duringthe pendulum-turn maneuver. In Fig. 12, we plot the 3-D trajec-tory of the vehicle yaw rate versus rear slip angle overtime. At each pair of , we calculate and determine thestability of vehicle motion at that given set of vehicle motionstates. For unstable points, we also use different symbols (i.e.,stars or triangles) to indicate whether there exist stable regionsat that moment. Fig. 13 illustrates the stability of the vehiclemotion under the human driver model. We use the same plot-ting notations as those in Fig. 12 under two values: 1.5and 3 m/s .
Comparing the results shown in Figs. 12 and 13, we findthat: 1) for the 1.5 m/s case, the vehicle is understable motion throughout the entire maneuver [see Fig. 13(a)]and 2) the increased 3 m/s brings the unstable mo-tion during short durations at aggressive turning points of thetrajectory [see Fig. 13(b)]. The reason for existence of these un-stable motions is due to large decelerations around these loca-tions, which indeed produces large load shifting on the frontand rear wheels and thus reduces the stable region as showed inFig. 6(d). We also observe these stability facts by the compar-ison results shown in Fig. 11(b) and (c).
It is clearly shown in Figs. 11–13 that the professional racingcar driver often operates the vehicle outside the stable regionsof the vehicle dynamics, while the typical human driver insteadcontrols the vehicle within the stable regions. This observation

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
YI et al.: ON THE STABILITY AND AGILITY OF AGGRESSIVE VEHICLE MANEUVERS 11
Fig. 11. CarSim simulation results under the human driver model. (a) Vehicle trajectory with with � � 3 m/s . (b) Comparison results of rear slip angles� . (c) Comparison results of vehicle yaw rates � . The shape and color of each data point indicate the stability result at that moment; see Fig. 12’s caption forexplaining these data points in details.
Fig. 12. Trajectory of the � � � and motion stability of racing car drivertesting results. The empty circles “ ” indicate that the motion at that moment isstable; the empty triangular points “�” indicate that the motion is unstable andthere does not exist stable region, while the solid star points “�” indicate thatthe motion is unstable but there exists a stable region in � � � plane.
provides new knowledge about how the racing car drivers con-trol the vehicle during these aggressive maneuvers. The newknowledge is in contrast to the existing yaw stability controllersuch as the design in [18] and [19] in which the vehicle sta-bility control is restricted only to stable regions of the vehicledynamics. Running vehicles in unstable regions is an advanceddriving skill by racing car drivers as we observed in the pen-dulum-turn maneuvers.
C. Maneuver Agility Comparisons
We compare the maneuver agility metrics of the racing cardriver and the typical human driver. Table III lists the compar-ison results for both the travel time and agility metrics cal-culated by (13) and by (17). We estimatefrom the experimental data and use it in calculation.
From Table III, we first notice that the testing data and theCarSim simulation results of the racing car driver are consistentin both travel time and the agility metrics and . Second,the larger used in the race car model to generate the ve-locity profile, the shorter travel time and larger agility metrics
and . It is clear that the racing car driver outperformsthe typical driver in both the travel time and the agility met-rics. The main reason for such a difference is that the racingcar driver uses the pendulum-turn maneuver strategy to obtainhigher lateral velocities/accelerations and larger side slip anglesthan those under the human driver control. Therefore, the mag-nitude of the vehicle velocity is much larger than that under thehuman driver model, which results in a shorter travel time.
Fig. 14 further illustrates the agility comparison results forthe transient agility metrics [see Fig. 14(a)] and[see Fig. 14(b)], and the relationship between and[see Fig. 14(c)]. From Fig. 14(a) and (b), we clearly see thatthe instantaneous agility metrics and by racingcar drivers (both testing data and CarSim simulation results) aremuch larger than those by the typical human driver model, par-ticularly at locations of large trajectory radii (i.e., from 100to 160 m) because of large side slip angles and large curvature

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
12 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY
Fig. 13. Trajectory of the � � � and motion stability of a simulated human driver with maximum longitudinal accelerations: (a) � � 1.5 m/s and (b)� � 3 m/s . The stability labels for each data point are the same as those in Fig. 12.
TABLE IIIPERFORMANCE COMPARISON BETWEEN RACING CAR DRIVER AND HUMAN DRIVER WITH TWO DIFFERENT MAXIMUM LONGITUDINAL ACCELERATIONS
� (IN m/s )
Fig. 14. Comparison of agility metrics under the racing car driver and the typical human driver model. (a) Instantaneous agility metric � ��� at location ����.(b) Agility metric � ��� at location ����. (c) Agility metric � versus � .
agilities at those locations. The racing car driver also utilizes alarge friction capacity since are large at many locations;see Fig. 14(b).
It is of an interesting observation that the calculated is al-most in a linear relationship with as shown in Fig. 14(c).It is also noticed that there are some differences between thetesting and CarSim simulations for and calcula-tions shown in Fig. 14(a) and (b). These differences could bepartially due to that the calculation of the agility metrics aresensitive to any variation in vehicle motion estimation. Anal-ysis and study on these observations need further investigationsas future work.
VI. CONCLUSION
We presented dynamic stability and agility analyses ofhuman-controlled aggressive vehicle maneuvers. We used the
hybrid physical/dynamic friction model to capture complextire/road interactions, and used the rear slip (rather than vehicleside slip angle) to precisely capture the vehicle stable regions.We also used the vehicle lateral jerk and the relative lateralacceleration to define a metric to quantify the maneuver agility.From testing data of a pendulum-turn maneuver by professionalracing car drivers and comparisons with high-fidelity humandriver simulations, we found that racing car drivers controlthe vehicle in the unstable regions of the vehicle dynamics toachieve superior agility performance. The presented stabilityand agility results provide new knowledge to design human-in-spired control systems that are different with the existingcontrollers in which the operation of vehicle maneuvers isstrictly restricted within the stable region of vehicle dynamics.We are currently developing new human-inspired controllersfor unstable yet safe aggressive maneuvers.

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
YI et al.: ON THE STABILITY AND AGILITY OF AGGRESSIVE VEHICLE MANEUVERS 13
APPENDIX
To prove the equivalence of (12) and (14), it is enough to showthat they are both equal to a common value.
We first write the vehicle acceleration, where is the turning
radius at location and and arethe vehicle linear velocity and the turning angular velocity,respectively. Note that angular velocity is not the same as thevehicle yaw rate because of the existence of the side slipangle (of the vehicle velocity vector in the body frame;see Fig. 1). With the above formulation for , we rewrite (12)as follows:
(18)
In the last step of the above derivation, we use thefact and
. From (18), we obtainan alternative set of formulations to obtain axial and curvatureagilities as
(19)
Without loss of generality, we consider the case the vehicletrajectory turns counterclockwise (i.e., ) such as the oneshown in Fig. 1. From the relationship between the body frameand Frenet frame, we have . From (12) and (19),we obtain the longitudinal jerk as
(20)
and the lateral jerk as
(21)
To see that formulation (14) produces the same andas (20) and (21), we first write velocity
. Then we obtain the acceleration vector
and further the jerk vector
(22)
Note that and and thus, ,, , and
. Plugging these formulations into
(22), we then obtain the same expressions as those in (20) and(21) for and , respectively. This completes the proof ofProposition 1.
ACKNOWLEDGMENT
The authors would like to thank Prof. P. Tsiotras of GeorgiaInstitute of Technology and Dr. E. Velenis of Brunel Universityfor sharing the testing data. The authors would also like to thankfour anonymous reviewers of the preliminary conference paper[29] and three anonymous reviewers of this paper for their con-structive suggestions.
REFERENCES
[1] V. Gavrilets, E. Frazzoli, B. Mettler, M. Piedmonte, and E. Feron, “Ag-gressive maneuvering of small autonomous helicopters: A human-cen-tered approach,” Int. J. Robot. Res., vol. 20, no. 10, pp. 795–807, 2002.
[2] E. Frazzoli, M. Dahleh, and E. Feron, “Real-time motion planning foragile autonomous vehicles,” AIAA J. Guid., Control, Dyn., vol. 25, no.1, pp. 116–129, 2002.
[3] V. Gavrilets, B. Mettler, and E. Feron, “Human-inspired control logicfor automated maneuvering of miniature helicopter,” AIAA J. Guid.,Control, Dyn., vol. 27, no. 5, pp. 752–759, 2004.
[4] P. Abbeel, A. Coates, M. Quigley, and A. Ng, “An application of re-inforcement learning to aerobatic helicopter flight,” in Advances inNeural Information Processing Systems, B. Schölkopf, J. Platt, and T.Hoffman, Eds. Cambridge, MA: MIT Press, 2007, vol. 19, pp. 1–8.
[5] P. Abbeel, “Apprenticeship learning and reinforcement learning withapplication to robotic control,” Ph.D. dissertation, Dept. Comput. Sci.,Stanford Univ., Stanford, CA, 2008.
[6] G. Avanzini, D. de Matteis, and L. de Socio, “Analysis of aircraft agilityon maximum performance maneuvers,” J. Aircraft, vol. 35, no. 4, pp.529–535, 1998.
[7] E. Velenis, P. Tsiotras, and J. Lu, “Modeling aggressive maneuvers onloose surface: The cases of trail-braking and pendulum-turn,” in Proc.Euro. Control Conf., 2007, pp. 1233–1240.
[8] E. Velenis, P. Tsiotras, and J. Lu, “Optimal properties and driver inputparameterization for trail-braking cornering,” Euro. J. Control, vol. 14,no. 4, pp. 308–320, 2008.
[9] E. Frazzoli, “Discussion on ‘Optimality properties and driver input pa-rameterization for trailing-braking cornering’,” Euro. J. Control, vol.14, no. 4, pp. 321–324, 2008.
[10] B. Olson, S. Shaw, and G. Stépán, “Stability and bifurcation of longi-tudinal vehicle braking,” Nonlinear Dyn., vol. 40, no. 4, pp. 339–365,2005.
[11] E. Ono, S. Hosoe, H. D. Tuan, and S. Doi, “Bifurcation in vehicle dy-namics and robust front wheel steering control,” IEEE Trans. ControlSyst. Technol., vol. 6, no. 3, pp. 412–420, May 1998.
[12] D.-C. Liaw, H.-H. Chiang, and T.-T. Lee, “Elucidating vehicle lateraldynamics using a bifurcation analysis,” IEEE Trans. Intel. Transport.Syst., vol. 8, no. 2, pp. 195–207, Feb. 2007.
[13] S. Shen, J. Wang, P. Shi, and G. Premier, “Nonlinear dynamics andstability analysis of vehicle plane motions,” Veh. Syst. Dyn., vol. 45,no. 1, pp. 15–35, 2007.
[14] V. Nguyen, G. Schultz, and B. Balachandran, “Lateral load transfereffects on bifurcation behavior of four-wheel vehicle system,” ASMEJ. Comput. Nonlinear Dyn., vol. 4, no. 4, 2009, Paper #041007.
[15] J. Yi and E. H. Tseng, “Nonlinear analysis of vehicle lateral motionswith a hybrid physical/dynamic tire-road friction model,” presentedat the ASME Dyn. Syst. Control Conf., Hollywood, CA, 2009, PaperDSCC2009-2717.
[16] J. Yi, “On hybrid physical/dynamic tire-road friction model,” presentedat the ASME Dyn. Syst. Control Conf., Hollywood, CA, 2009, PaperDSCC2009-2548.
[17] T. O’Neil, “Rally driving manual,” Team O’Neil Rally School and CarControl Center, Dalton, NH, 2006. [Online]. Available: http://www.team-oneil.com/
[18] T. Chung and K. Yi, “Design and evaluation of side slip angle-basedvehicle stability control scheme on a virtual test track,” IEEE Trans.Control Syst. Technol., vol. 14, no. 2, pp. 224–234, Mar. 2006.
[19] C. G. Bobier, S. Joe, and J. C. Gerdes, “Sliding surface envelope con-trol: Keep the vehicle within a safe state-space boundary,” presentedat the ASME Dyn. Syst. Control Conf., Cambridge, MA, 2010, PaperDSCC2010-4144.

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
14 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY
[20] M. Yamakado and M. Abe, “An experimentally confirmed driver lon-gitudinal acceleration control model combined with vehicle lateral mo-tion,” Veh. Syst. Dyn., vol. 46, pp. 129–149, 2008.
[21] U. Kiencke and L. Nielsen, Automotive Control Systems. New York:Springer-Verlag, 2000.
[22] H. B. Pacejka, Tire and Vehicle Dynamics, 2nd ed. Warrendale, PA:SAE International, 2006.
[23] W. Liang, J. Medanic, and R. Ruhl, “Analytical dynamic tire model,”Veh. Syst. Dyn., vol. 46, no. 3, pp. 197–227, 2008.
[24] J. Yi, Y. Zhang, and D. Song, “Autonomous motorcycles for agile ma-neuvers: Part I: Dynamic modeling,” in Proc. IEEE Conf. DecisionControl, 2009, pp. 4613–4618.
[25] M. Innocenti, R. Jouty, and J. Beck, “Airframe agility: Flight me-chanics,” Advisory Group for Aerosp. Res. Development (AGARD),Tech. Rep. AGARD AR-314, 1994, pp. 18–35.
[26] J. Yi, H. Wang, J. Zhang, D. Song, S. Jayasuriya, and J. Liu, “Kinematicmodeling and analysis of skid-steered mobile robots with applicationsto low-cost inertial measurement unit-based motion estimation,” IEEETrans. Robot., vol. 25, no. 5, pp. 1087–1097, Sep. 2009.
[27] C. C. MacAdam, “Application of an optimal preview control for sim-ulation of closed-loop automobile driving,” IEEE Trans. Syst., Man,Cybern., vol. 11, no. 6, pp. 393–399, Jun. 1981.
[28] F. Braghin, F. Cheli, S. Melzi, and E. Sabbioni, “Race driver model,”Comput. Structures, vol. 86, pp. 1503–1516, 2008.
[29] J. Li, J. Yi, Z. Liu, and J. Lu, “On the dynamic stability and agility ofaggressive vehicle maneuvers: A pendulum-turn maneuver example,”presented at the ASME Dyn. Syst. Control Conf., Cambridge, MA,2010, Paper DSCC2010-4032.
Jingang Yi (S’99–M’02–SM’07) received the B.S.degree in electrical engineering from ZhejiangUniversity, Hangzhou, China, in 1993, the M.Eng.degree in precision instruments from TsinghuaUniversity, Beijing, China, in 1996, and the M.A.degree in mathematics and the Ph.D. degree inmechanical engineering from the University ofCalifornia, Berkeley, in 2001 and 2002, respectively.
He is currently an Assistant Professor with the De-partment of Mechanical Engineering, Rutgers Uni-versity, Piscataway, NJ. His research interests include
autonomous robotic systems, dynamic systems and control, mechatronics, au-tomation science and engineering, with applications to biomedical systems, civilinfrastructural and transportation systems.
Dr. Yi is a member of the American Society of Mechanical Engineers(ASME). He was a recipient of the NSF CAREER Award in 2010. He currentlyserves as an Associate Editor of the ASME Dynamic Systems and ControlDivision and the IEEE Robotics and Automation Society Conference EditorialBoards. He also served as a Guest Editor of the IEEE TRANSACTIONS ON
AUTOMATION SCIENCE AND ENGINEERING.
Jingliang Li received the B.S. degree in automotiveengineering from Beijing Institute of Technology,Beijing, China, in 2006. He is currently pursuingthe Ph.D. degree with the Department of Automo-tive Engineering, Beijing Institute of Technology,Beijing, China.
During 2009–2010, he was a visiting Ph.D. studentwith the Department of Mechanical and AerospaceEngineering, Rutgers University, Piscataway, NJ.His current research interests include vehicle engi-neering, vehicle dynamic systems and control.
Mr. Li is a student member of the American Society of Mechanical Engineers(ASME).
Jianbo Lu (M’97–SM’09) received the Ph.D. degreein aeronautics and astronautics from Purdue Univer-sity, West Lafayette, IN, in 1997.
He is a Technical Specialist with the Researchand Advanced Engineering, Ford Motor Company,Dearborn, MI. He worked at Delphi Corporationfrom 1997 to 2000 and joined Ford Motor Companyin 2000. His research interests include ground/spacevehicle dynamics and control, semi-autonomous/au-tonomous systems, and active safety systems. Heholds 60 U.S. patents, many of them were imple-
mented in millions of vehicles.Dr. Lu was a recipient of the Henry Ford Technology Award. He currently
serves as an Associate Editor for the IFAC Journal of Control Engineering Prac-tice and the IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, and heis on the editorial board of International Journal of Vehicle Autonomous Sys-tems.
Zhaodu Liu received the B.S. degree in mechanicalengineering from Hefei University of Technology,Hefei, China, in 1982, and the Ph.D. degree inmechanical engineering from the University ofBelgrade, Yugoslavia, in 1994.
He is currently a Professor with the Department ofVehicular Engineering and the area Head of the De-partment of Vehicle Information and Technology atBeijing Institute of Technology, Beijing, China. Hisresearch interests include vehicle system dynamics,vehicle safety devices design, and mechatronics.
Dr. Liu is a member of the Society of Automotive Engineers (SAE) of Chinaand a member of the National Technical Committee on Operating Safe Tech-nology and Testing Equipment for Motor Vehicles of Standardization Adminis-tration of China (SAC/TC364). He currently serves on the editorial board of theJournal of Automotive Engineering of China and the Journal of Beijing Instituteof Technology.