[IEEE 2013 14th International Carpathian Control Conference (ICCC) - Rytro, Poland...
4
Free vibration control of a cantilever MR fluid based sandwich beam Mateusz Romaszko AGH University of Science and Technology Faculty of Mechanical Engineering and Robotics Cracow, Poland [email protected] AbstractThe subject of the paper is vibration control of a cantilever beam with magnetorheological (MR) fluid. Based on the results of identification and energy analysis, a simple semi- active vibration control algorithm for free vibrations of the beam based on switching the system equivalent stiffness between two distinct values was proposed. The algorithm was realized by controlling the current supplying the electromagnet. The MR fluid contained in the beam was activated by a magnetic field and under the impact of magnetic field enables the changing of its stiffness and damping properties. The free vibrations of the beam were investigated for constant current and current varied according to the assumed control algorithm. Keywords: cantilever beam, MR fluid, vibration, control I. INTRODUCTION Magnetorheological fluid (MRF) is a suspension that consists of: ferromagnetic particles and carrier liquid. Iron particles are the size of a few microns. MRF exhibit the ability to reversibly change from linear viscous liquids (when there is no magnetic field) to semi-solids when exposed to magnetic field. The change from one state to another takes a short time order of milliseconds. Therefore MRF are excellent for applications where strong dynamic features are required. In conventional mechanical structures the globally distributed stiffness and damping characteristics of the system are fixed parameters which cannot be easily changed or controlled. The introduction of MRF to such systems as beams [1,2], plates [3], shells, etc. enables the changing of their stiffness and damping properties under the action of a magnetic field. It allows to change/control the parameters of the system. With appropriate control of current supplying the electromagnet inducing external magnetic field strength vibration can be reduced and undesirable resonance can be eliminated. In this paper, a switched stiffness control strategy is proposed for free vibration suppression of three-layer cantilever beam with MRF. Past research in vibration control using variable stiffness also proves that such concept can be effective [4,5,6]. A single-degree-of-freedom (sdof) system is considered here to demonstrate the concept. In the first place an algorithm has to be developed for controlling the current in the electromagnet coil so that properties of MRF (stiffness and damping) can be varied under the action. The analysis of motion is mostly associated with discretization of a continuous system [7,8] and the control strategy is developed based on the modal control approach. II. EXPERIMENTAL SET-UP The examined object is a three-layer beam filled with MRF. The structure of the beam is shown in Fig. 1. The beam is formed by two aluminum strips l= 400 mm in length, b= 30 mm in width and h 1 = 2 mm in thickness and the MRF (type 132DG manufactured by Lord Corporation [9]) layer, filling the space between the strips. The MRF is sealed by a spacer g= 1.5 mm in width and h 2 = 2 mm in height made of the silicone rubber [10,11]. The beam vibrates in a magnetic field produced by an electromagnet the photograph of which is presented in Fig. 2. On both poles of the electromagnet coils have been wound, each consisting of 442 turns, made of copper wire 1 mm in diameter. There is a 20 mm distance between the poles of the electromagnet. The poles are 40 mm wide and 80 mm long. b l h 1 h 2 g Aluminium layers MR Fluid Rubber seal Figure 1. Structure of the beam Figure 2. View of the electromagnet 978-1-4673-4490-6/13/$31.00 ©2013 IEEE
Transcript of [IEEE 2013 14th International Carpathian Control Conference (ICCC) - Rytro, Poland...
![Page 1: [IEEE 2013 14th International Carpathian Control Conference (ICCC) - Rytro, Poland (2013.05.26-2013.05.29)] Proceedings of the 14th International Carpathian Control Conference (ICCC)](https://reader042.fdocuments.us/reader042/viewer/2022020408/575095b91a28abbf6bc44c46/html5/page/1.jpg)
Free vibration control of a cantilever MR fluid based sandwich beam
Mateusz Romaszko AGH University of Science and Technology
Faculty of Mechanical Engineering and Robotics Cracow, Poland
Abstract�—The subject of the paper is vibration control of a cantilever beam with magnetorheological (MR) fluid. Based on the results of identification and energy analysis, a simple semi-active vibration control algorithm for free vibrations of the beam based on switching the system equivalent stiffness between two distinct values was proposed. The algorithm was realized by controlling the current supplying the electromagnet. The MR fluid contained in the beam was activated by a magnetic field and under the impact of magnetic field enables the changing of its stiffness and damping properties. The free vibrations of the beam were investigated for constant current and current varied according to the assumed control algorithm.
Keywords: cantilever beam, MR fluid, vibration, control
I. INTRODUCTION Magnetorheological fluid (MRF) is a suspension that
consists of: ferromagnetic particles and carrier liquid. Iron particles are the size of a few microns. MRF exhibit the ability to reversibly change from linear viscous liquids (when there is no magnetic field) to semi-solids when exposed to magnetic field. The change from one state to another takes a short time �– order of milliseconds. Therefore MRF are excellent for applications where strong dynamic features are required. In conventional mechanical structures the globally distributed stiffness and damping characteristics of the system are fixed parameters which cannot be easily changed or controlled. The introduction of MRF to such systems as beams [1,2], plates [3], shells, etc. enables the changing of their stiffness and damping properties under the action of a magnetic field. It allows to change/control the parameters of the system. With appropriate control of current supplying the electromagnet inducing external magnetic field strength vibration can be reduced and undesirable resonance can be eliminated.
In this paper, a switched stiffness control strategy is proposed for free vibration suppression of three-layer cantilever beam with MRF. Past research in vibration control using variable stiffness also proves that such concept can be effective [4,5,6]. A single-degree-of-freedom (sdof) system is considered here to demonstrate the concept. In the first place an algorithm has to be developed for controlling the current in the electromagnet coil so that properties of MRF (stiffness and damping) can be varied under the action. The analysis of motion is mostly associated with discretization of a continuous
system [7,8] and the control strategy is developed based on the modal control approach.
II. EXPERIMENTAL SET-UP The examined object is a three-layer beam filled with MRF.
The structure of the beam is shown in Fig. 1. The beam is formed by two aluminum strips l= 400 mm in length, b= 30 mm in width and h1= 2 mm in thickness and the MRF (type 132DG manufactured by Lord Corporation [9]) layer, filling the space between the strips. The MRF is sealed by a spacer g= 1.5 mm in width and h2= 2 mm in height made of the silicone rubber [10,11]. The beam vibrates in a magnetic field produced by an electromagnet the photograph of which is presented in Fig. 2. On both poles of the electromagnet coils have been wound, each consisting of 442 turns, made of copper wire 1 mm in diameter. There is a 20 mm distance between the poles of the electromagnet. The poles are 40 mm wide and 80 mm long.
b
l
h 1h 2
g
Aluminium layers MR FluidRubber seal
Figure 1. Structure of the beam
Figure 2. View of the electromagnet
978-1-4673-4490-6/13/$31.00 ©2013 IEEE
![Page 2: [IEEE 2013 14th International Carpathian Control Conference (ICCC) - Rytro, Poland (2013.05.26-2013.05.29)] Proceedings of the 14th International Carpathian Control Conference (ICCC)](https://reader042.fdocuments.us/reader042/viewer/2022020408/575095b91a28abbf6bc44c46/html5/page/2.jpg)
Free vibration control of the cantilever MRF based sandwich beam is tested in the experimental setup shown schematically in Fig. 3. The electromagnet�’s position is defined by distance ym between the beam attachment point and the centre of the electromagnet coil. The electromagnet is supplied with current i from a power amplifier. The measuring and control system consists of: a PC computer and I/O card RT-DAC4 (INTECO Ltd), supported by MATLAB/Simulink. A laser sensor (SENSOPART FT50RLA) is used to measure the displacement z of the beam�’s end point P. The power amplifier was used to generate a magnetic field and control its strength. Two modes of amplifier operation are available: the voltage mode and the current mode with an analogue PID controller embedded. The amplifier incorporates sensors for measuring the output signal u and the current i in the electromagnet coil.
Controlalgorithm
Matlab/Simulink
Windows
Multi I/O board
z
Measurement and control system
i
Poweramplifier
zuiic
ym
P
Laser sensor
Electromagnet Beam
Figure 3. Schematic diagram of the experimental setup
III. SWITCHED STIFFNESS VIBRATION CONTROL CONCEPT Switched stiffness vibration control method can be best
explained by taking a sdof mass-damper-spring system as shown in Fig. 4. The governing equation is simply given by
( ) ( ) ( ) ( ) 0mx t dx t k t x t( ) ( ) ( )mx t dx t k t( ) ( ) ( )) ( ) (( ) ( )( ) (( ) (1)
where x(t) is the system output, m is the mass, d is the damping and k(t) is the stiffness. The switched stiffness method is a semi-active vibration control method, where the energy of the system is dissipated by changing the values of the spring stiffness. The spring is assumed to possess a step-variable stiffness setting in the sense that it can be switched between two distinct values: high stiffness value kH and kL low stiffness value. The high stiffness state is used when the system is moving away from its equilibrium such that the potential energy stored in the system is maximized The maximum potential energy at maximum mass displacement is simply
m
k(t)d
x(t)
Figure 4. The sdof mass-damper-spring system with variable stiffness
2max0.5
maxp HE k x . The spring is switched to low the stiffness state when the system has reached its maximum stored potential energy. At this point (xmax), the stiffness is switched to low value and kept at this value until mass reaches the equilibrium point again. The loss in potential energy can be given as
2 2 2max max max
1 1 12 2 2p H LE k x k x kx (2)
where H Lk k k . The decrease in potential energy given by (2) will consequently result in a decrease in converted kinetic energy, thereby introducing energy dissipation in the system. The stiffness is then switched back to the high value when the system moves away from its equilibrium, thus switching stiffness from low to high in a periodic manner to gradually dissipate system total energy. A heuristic control law was suggested to essentially switch the beam's stiffness values through a hard switching or on-off (relay) control. The control law is based on the position z of the beam's free end with respect to the equilibrium state (beam is not deformed). The control law can be stated as:
For numerical simulations, the spring stiffness value is changed in such a way that the potential energy is dissipated at maximum deflection, resulting in the �“step-down�” of total system energy, and hence, reducing the displacement as shown in Fig. 5. The amount of dissipated energy over a particular period is proportional to the difference between high and low values ( k). When the stiffness is switched as per control law given in (3), it results in significant vibration suppression.
In most cases, the free vibrations of a cantilever beam involve the first mode. Accordingly, the beam displacement is given by the formula [12]:
( , ) ( ) ( )w y t y z t (4)
where (y) is the vibration mode and z(t) is the displacement of the beam's free end (Fig. 6). The equation of the beam's vibration can be reduced to the following differential equation
( ) 0( ) 0
H
L
K t K for zzK t K for zz
0z0z
(3)
2013 14th International Carpathian Control Conference (ICCC)312
![Page 3: [IEEE 2013 14th International Carpathian Control Conference (ICCC) - Rytro, Poland (2013.05.26-2013.05.29)] Proceedings of the 14th International Carpathian Control Conference (ICCC)](https://reader042.fdocuments.us/reader042/viewer/2022020408/575095b91a28abbf6bc44c46/html5/page/3.jpg)
x
a)
x.b)
kH
kL
c)
t
Ener
gy
d)
Figure 5. Illustration of the stiffness switching concept for a sdof system
where coefficients M, D, K stand for the modal mass, damping and stiffness, respectively. As the interaction between the magnetic field and the beam with MRF give rise to the change of the beam's damping and stiffness, there is a possibility for controlling those parameters such that the vibration amplitude should be reduced as quickly as possible. Switched stiffness vibration control concept can be implemented through the control of magnetic field which causes the change of the MRF properties. The idea of switched stiffness was demonstrated using a sdof (Fig. 4).
y
w(y,t)
l
z
z(t)
(y)
Figure 6. The sdof mass-damper-spring system with variable stiffness
IV. EXPERIMENTAL VERIFICATION OF SWITCHED STIFFNESS CONCEPT
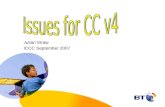
The setup for testing the vibrations of sandwich beams with MRF and the system for controlling the current supplying the electromagnet are now used in testing the effects of control action in accordance with the control algorithm (see section 3) on the reduction of beam�’s free vibration. Before the algorithm can be used in practical applications, further tests are required to find out how variation of current flowing in the electromagnet coil should affect the beam�’s stiffness. This relationship shown in Fig. 7 is based on research data described in [7] for electromagnet's position ym= 40 mm. The effectiveness of the control algorithm can be evaluated based on the plots of the beam�’s end displacement (Fig. 8). With control (solid black lines), the beam�’s end displacement tends to decrease faster than in the case when no current flows through the electromagnet
coil (solid gray lines, low stiffness KL). However, the displacement decrease more slowly than in the case when the electromagnet coil is supplied with current i=2 A (dotted lines, high stiffness KH). Controlling the magnetic field causes not only variations of the beam�’s modal stiffness K but the change of modal damping D too.
Fig. 9 presents the plots of the beam�’s end displacement, the current ic predicted by control algorithm and the current i flowing in electromagnet coil. The current flowing in electromagnet coil differs from the predicted value due to the dynamic behaviour of the control system and the power-supply.
0 2 4 6 8 10170
172
174
176
178
180
I [A]
K [
N/m
]
Figure 7. MR beam modal stiffness K vs. current i in the electromagnet coil
0 0.5 1 1.5 2-10
-5
0
5
10
t [s]
z [m
m]
Figure 8. Experimental response of the beam�’s end
0 0.5 1 1.5 2-10
0
10
z [m
m]
a)
0 0.5 1 1.5 20
1
2
i c [A]
b)
0 0.5 1 1.5 20
1
2
t [s]
i [A
]
c)
Figure 9. Displacement of the beam�’s end a), current predicted by algorithm b), current in the electromagnet coil c)
( ) ( ) ( ) 0Mz t Dz t Kz t( ) ( ) (Mz( ) ( ) () ( )( ) (( )( ) (5)
2013 14th International Carpathian Control Conference (ICCC) 313
![Page 4: [IEEE 2013 14th International Carpathian Control Conference (ICCC) - Rytro, Poland (2013.05.26-2013.05.29)] Proceedings of the 14th International Carpathian Control Conference (ICCC)](https://reader042.fdocuments.us/reader042/viewer/2022020408/575095b91a28abbf6bc44c46/html5/page/4.jpg)
V. CONCLUSION The concept of switched stiffness was explained using a
simple sdof system. The structure of the three-layer cantilever beam with MRF was demonstrated. The experimental setup, its equipment and the structure of the electromagnet producing magnetic field were described.
Applications of MRF in the sandwich beam allows the beam�’s vibration to be actively reduced through the control of magnetic field acting upon the beam. The proposed algorithm for controlling the current supplying the electromagnet utilises the changes of the stiffness and damping coefficients to effect the fast reduction of the vibration amplitude. The purpose of this research was to determine whether the change of the beam�’s stiffness induced by variations of magnetic field can be sufficiently large to be effectively used in vibration reduction algorithms. Results show that application of a stiffness control algorithm to vibration reduction is ineffective due to concurrent changes of damping coefficients, decreasing the efficiency of the control algorithm. A simple algorithm whereby magnetic field is generated by the maximal current supplying the electromagnet seems to be a better solution for vibration reduction. One has to bear in mind, however, that this algorithm consumes more power than the switching algorithm.
Further work concerning new effective algorithm should focus on stiffness control algorithms admitting only slight modifications of the effects of variations in the damping coefficient.
ACKNOWLEDGMENT This work is supported by AGH University of Science and
Technology under research program No. 15.11.130.485.
REFERENCES
[1] M. Yalcintas, D. Dai, �“Magnetorheological and electrorheological materials in adaptive structures and their performance comparison�”, Smart Materials and Structures, vol. 8, pp. 560-573, 1999
[2] K.D. Weiss, T.G. Duclos, M.J. Chrzan, L.C. Yanyo, US Patent 5,547,049, 1996
[3] J. Snamina, �“Energy dissipation in three-layered plate with magnetorheological fluid�”, Solid State Phenomena, vol. 177, pp. 143-150, 2011
[4] P.L. Walsh, J.S. Lamancusa, �“A variable stiffness vibration absorber for minimization of transient vibrations�”, Journal of Sound and Vibration, vol. 158, pp. 195-211, 1992
[5] A. Ramaratnam, N. Jalili, �“A switched stiffness approach for structural vibration control: theory and real-time implementation�”, Journal of Sound and Vibration, vol. 291, pp. 258-274, 2006
[6] M.A. Franchek, M.W. Ryan, R.J. Bernhard, �“Adaptive passive vibration control�”, Journal of Sound and Vibration, vol. 189, pp. 565-585, 1995
[7] M. Romaszko, M. Wegrzynowski, �“FEM analysis of a cantilever sandwich beam with MR fluid based on ANSYS�”, Solid State Phenomena, in press
[8] J. Snamina, B. Sapi ski, M. Romaszko, �”Modeling of a sandwich beam incorporating magnetorheological fluid using FE method�”, Engineering Modeling, vol. 8, no. 38, pp. 185-192, 2010
[9] MRF-132DG Magneto-Rheological Fluid Typical Properties, Lord Inc. http://www.lord.com
[10] J. Snamina, B. Sapi ski, M. Romaszko, �“Vibration parameter analysis of sandwich cantilever beams with multiple MR fluid segments�”, Engineering Modeling, vol. 12, no. 43, pp. 247-254, 2012
[11] M. Romaszko, S. Paku a, B. Sapinski, J. Snamina, �“Vibration parameters of sandwich beams with two types of MR fluid�”, Mechanics and Control, vol. 30, pp. 151-156, 2011
[12] B. Sapinski, J. Snamina, M. Romaszko, �”Experimental results of forced vibrations of the beam with magnetorheological fluid�”, Technical Transactions, issue 2, year 108, 1-M, pp. 215-222, 2011
2013 14th International Carpathian Control Conference (ICCC)314