IE 419 1 Work Design: Productivity and Safety Dr. Andris Freivalds Class #15.
31
IE 419 1 IE 419 Work Design: Productivity and Safety Dr. Andris Freivalds Class #15
-
Upload
kalyn-harrold -
Category
Documents
-
view
216 -
download
2
Transcript of IE 419 1 Work Design: Productivity and Safety Dr. Andris Freivalds Class #15.
IE 419 1
IE 419 Work Design:
Productivity and Safety
Dr. Andris Freivalds
Class #15

IE 419 2
IE 419 Work Design:
Productivity and Safety
Dr. Andris Freivalds
Class #15

IE 419 3
Basics of Basic MOSTOnly three activity sequences:
1) General Move• Movement of object freely through space• ½ of all work sequences
2) Controlled Move• Movement of object attached to another or
in contact with a surface• ⅓ of all work sequences
3) Tool/Equipment Use• 1/6 of all work sequences
IE 419 4
General Move - Basics• Has 4 subactivities:
1) A = Action distance (horizontal)2) B = Body motion (vertical)3) G = Gain control (i.e. GET cases A, B, C)4) P = Placement (i.e. PUT cases A, B, C)
• Grouped into 3 phases:1) Get – reach and gain control of object2) Put – move object to new location3) Return – distance walked back to
workstation, not for hands
IE 419 5
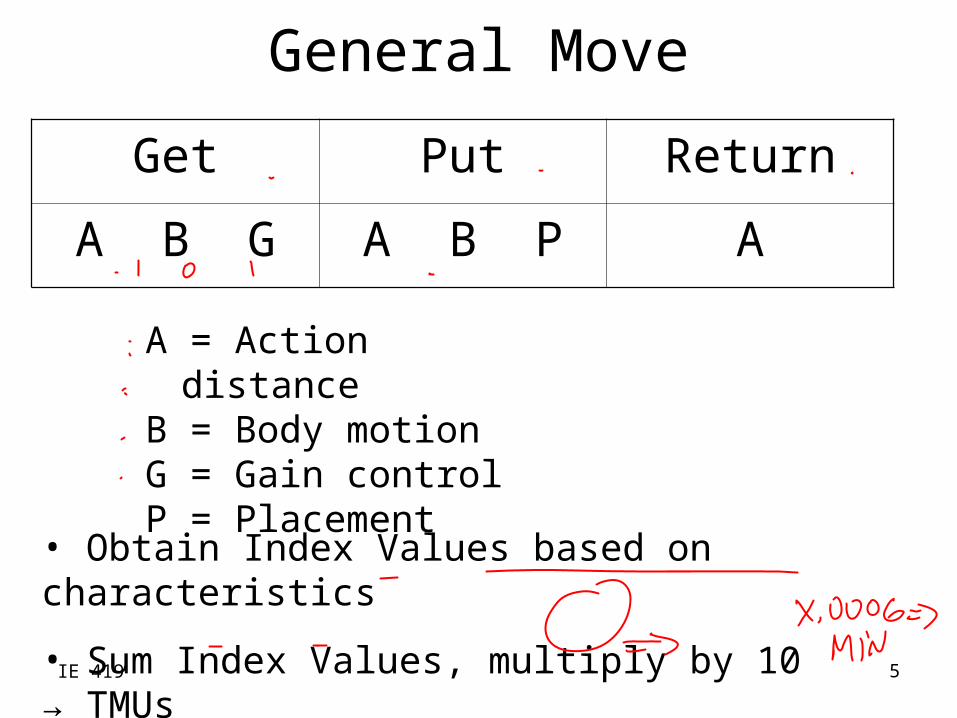
General Move
Get Put Return
A B G A B P A
A = Action distance B = Body motionG = Gain control P = Placement
• Obtain Index Values based on characteristics
• Sum Index Values, multiply by 10 → TMUs
IE 419 6
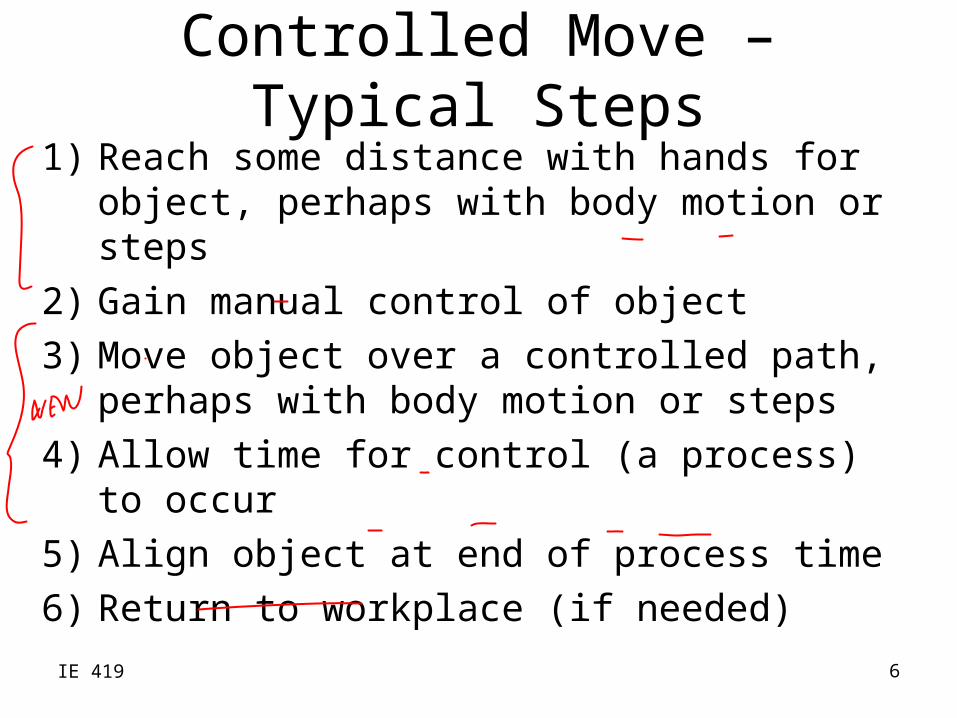
Controlled Move – Typical Steps
1) Reach some distance with hands for object, perhaps with body motion or steps
2) Gain manual control of object
3) Move object over a controlled path, perhaps with body motion or steps
4) Allow time for control (a process) to occur
5) Align object at end of process time
6) Return to workplace (if needed)
IE 419 7
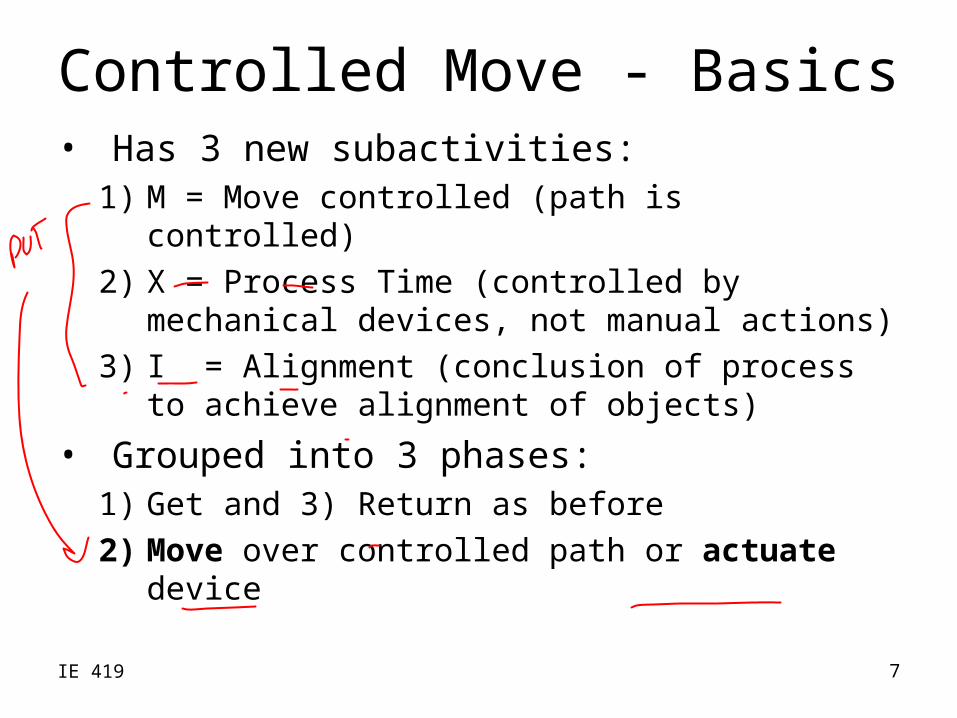
Controlled Move - Basics• Has 3 new subactivities:
1) M = Move controlled (path is controlled)
2) X = Process Time (controlled by mechanical devices, not manual actions)
3) I = Alignment (conclusion of process to achieve alignment of objects)
• Grouped into 3 phases:1) Get and 3) Return as before
2) Move over controlled path or actuate device

IE 419 8
Controlled Move
Get Move/Actuate Return
A B G M X I A
A = Action distance B = Body motionG = Gain control M = Move controlledX = Process TimeI = Alignment

IE 419 9
MOST - Controlled Move

IE 419 10
Ex #2 - Controlled Move
Get Move/Actuate Return
A1 B0 G1 M1 X10 I0 A0
A1 = Reach to lever (within reach)B0 = No body motionG1 = Gain control of leverM1 = Move lever (< 12 in.) to engageX10 = Process time of ~3.5 secI0 = No alignmentA0 = No return
Engage a feed lever on a milling machine.
∑IV = 1+1+1+10 = 13, 13x10 = 130 TMUs

IE 419 11
Controlled Move - Parameter IndexingMove Controlled (M)
• M1 one stage ≤ 12 in
– or press button/switch/knob
• M3 one stage > 12 in
– or push/pull with resistance – or seat/unseat– or high control– two stages ≤ 24 in
• M6 two stages > 24 in
– or with 1-2 steps
• M10 3-4 stages
– or 3-4 steps
• M16 6-9 steps
• Extended values
Note: Applies to feet also, Ex. Push pedal > 12 in → M3
IE 419 12
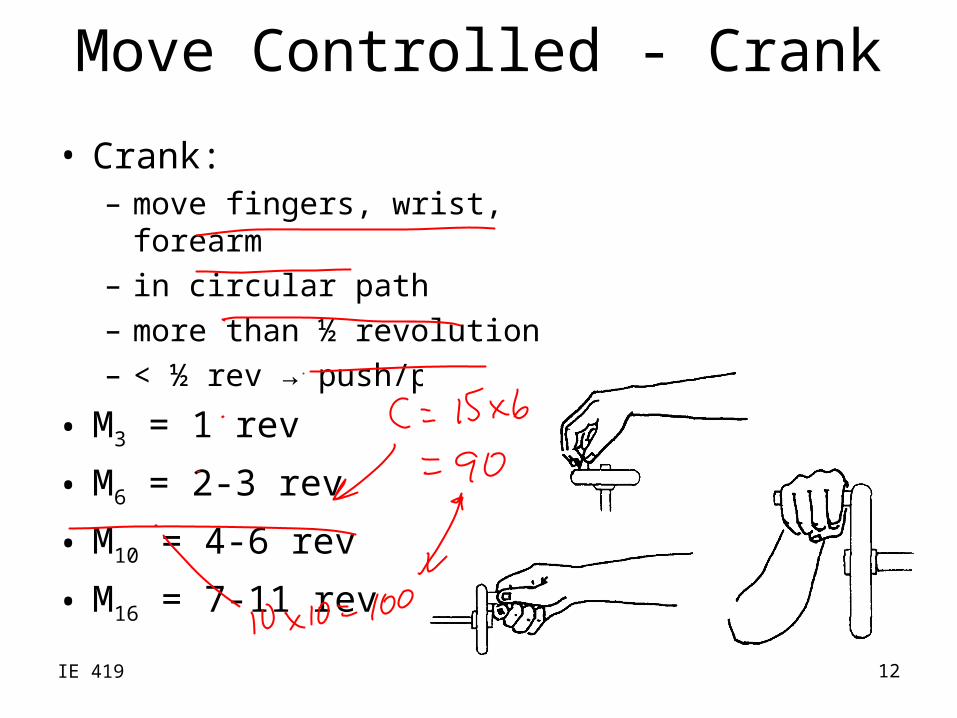
Move Controlled - Crank
• Crank: – move fingers, wrist, forearm– in circular path– more than ½ revolution– < ½ rev → push/pull/pivot
• M3 = 1 rev
• M6 = 2-3 rev
• M10 = 4-6 rev
• M16 = 7-11 rev

IE 419 13
Controlled Move – Process Time
Index Value Seconds Minutes0 No process time
1 0.5 0.01
3 1.5 0.02
6 2.5 0.04
10 4.5 0.07
16 7.0 0.11
330 124 2.06

IE 419 14
Controlled Move – Alignment
• Line up to a point(s)• Single eye focus
• I1 to one point in single correcting action
• I3 to two ≤ 4 in apart
• I6 to two > 4 in apart
• I16 with precision
IE 419 15
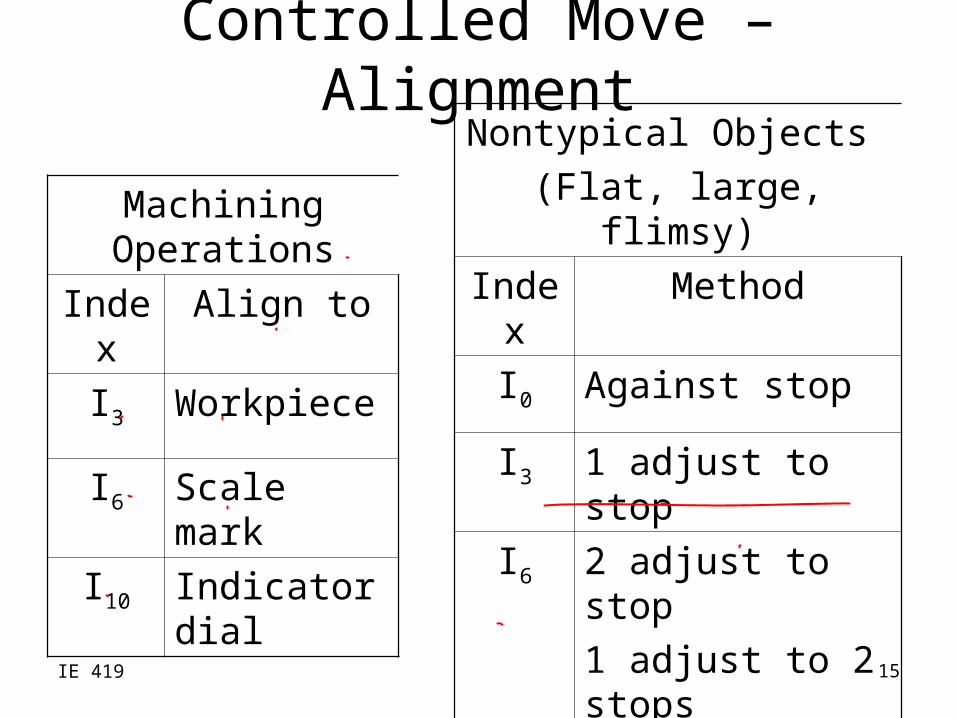
Controlled Move – Alignment
Machining Operations
Index Align to
I3 Workpiece
I6 Scale mark
I10 Indicator dial
Nontypical Objects
(Flat, large, flimsy)
Index Method
I0 Against stop
I3 1 adjust to stop
I6 2 adjust to stop
1 adjust to 2 stops
I10 3 adjust to stop
2 adjust to line

IE 419 16
Ex #3 - Controlled Move• A press operator moves a 4x8 ft. sheet of thin
gauge steel a distance of 14 inches. The sheet is aligned to two stops on opposite ends of the sheet (not necessary to reposition hands during alignment). The operator takes one step back to gain control of the sheet.
Get Move/Actuate Return
A3 B0 G3 M3 X0 I6 A0
∑IV = 3+3+3+6 = 15, 15x10 = 150 TMUs

IE 419 17
MOST - Controlled Move

IE 419 18
Ex #4 - Controlled Move• A material handler takes hold of a heavy carton
with both hands and pushes it 18 in. across conveyor rollers.
Get Move/Actuate Return
A1 B0 G3 M3 X0 I0 A0
∑IV = 1+3+3 = 7, 7x10 = 70 TMUs

IE 419 19
Ex #5 - Controlled Move• Using a foot pedal to activate the sewing
machine, an operator sews a stitch requiring 3.5 sec process time.
Get Move/Actuate Return
A1 B0 G1 M1 X10 I0 A0
∑IV = 1+1+1+10 = 13, 13x10 = 130 TMUs
IE 419 20
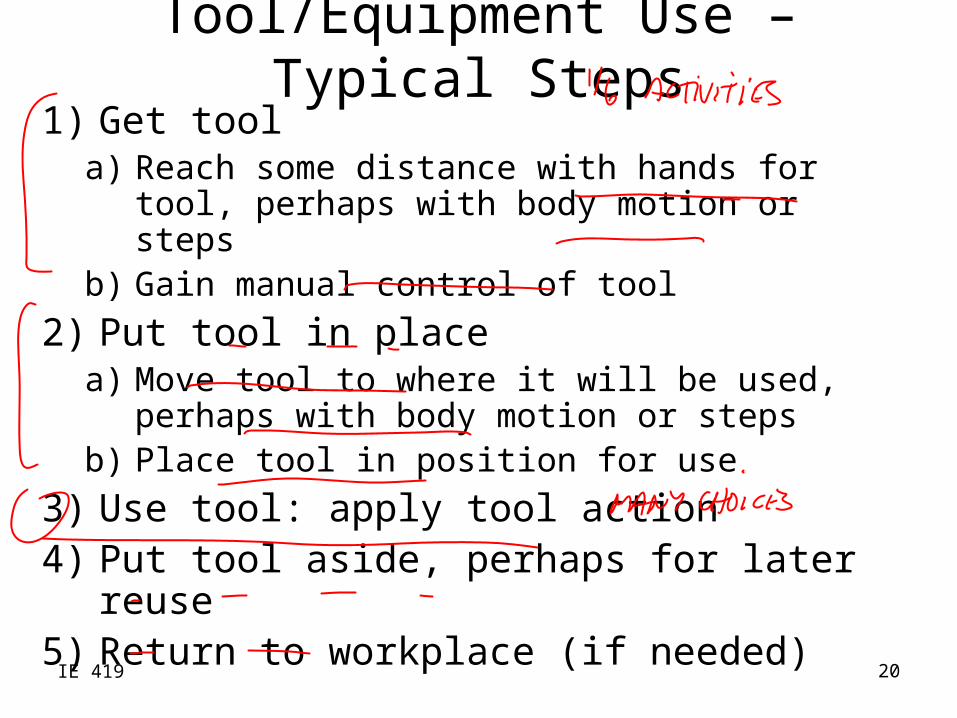
Tool/Equipment Use – Typical Steps1) Get tool
a) Reach some distance with hands for tool, perhaps with body motion or steps
b) Gain manual control of tool
2) Put tool in placea) Move tool to where it will be used, perhaps
with body motion or stepsb) Place tool in position for use
3) Use tool: apply tool action4) Put tool aside, perhaps for later reuse5) Return to workplace (if needed)
IE 419 21
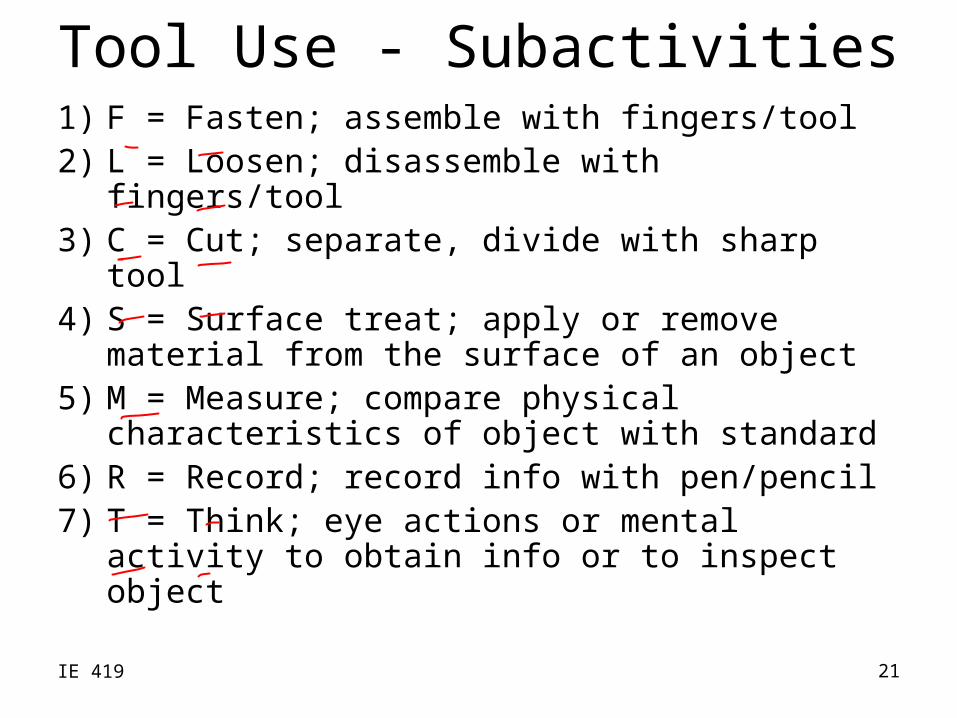
Tool Use - Subactivities1) F = Fasten; assemble with fingers/tool2) L = Loosen; disassemble with fingers/tool3) C = Cut; separate, divide with sharp tool4) S = Surface treat; apply or remove
material from the surface of an object5) M = Measure; compare physical
characteristics of object with standard6) R = Record; record info with pen/pencil7) T = Think; eye actions or mental activity
to obtain info or to inspect object

IE 419 22
Equipment Use - Subactivities1) W = Keyboard/Typewriter; use
mechanical or electronic data entry device
2) K = Keypad; use alphanumeric keypad such as on a PDA or telephone
3) H = Letter/Paper Handling; performance of various paper filing and sorting operations

IE 419 23
Tool/Equipment Use
Get Put in place
Use Put aside
Return
A B G A B P * A B P A
A = Action distance B = Body motionG = Gain control P = Placement

IE 419 24
MOST – Tool Use -1
ABG ABP – tool placement prior to use

IE 419 25
MOST – Tool Use 2

IE 419 26
Ex #6 – Tool Use (Fasten/Loosen)• Obtain a nut from a parts bin located within
reach, place it on the bolt, and run it down with seven finger actions.
∑IV = 1+1+1+3+10 = 16, 16x10 = 160 TMUs
Get Put in place
Use Put aside
Return
A1 B0 G1 A1 B0 P3 F10 A0 B0 P0 A0

IE 419 27
Ex #7 – Tool Use (Fasten/Loosen)• From a position in front of an engine lathe, obtain
a large T-wrench located five steps away, loosen one bolt on the lathe with both hands, using five arm actions. Set aside T-wrench (within reach).
∑IV = 10+1+10+3+24+1+1 = 50,
50x10 = 500 TMUs
Get Put in place
Use Put aside
Return
A10B0G1 A10B0P3 L24 A1 B0 P1 A0

IE 419 28
MOST – Tool Use 3

IE 419 29
Ex #8 – Tool Use (Cut)• An operator picks up a knife from a bench two
steps away, makes one cut across the top of a cardboard box, and sets aside knife on the bench.
∑IV = 3+1+3+1+3+3+1 = 15,
15x10 = 150 TMUs
Get Put in place
Use Put aside
Return
A3 B0 G1 A3 B0 P1 C3 A3 B0 P1 A0

IE 419 30
Ex #9 – Tool Use (Surface Treat)• Before marking off a piece of sheet metal for a
cutting operation, the operator takes a rag from his pocket and wipes (5x) an oily film from the surface.
1+1+1+1+32 +1+1 = 38,
38x10 = 380 TMUs
A1 B0 G1 A1 B0 P1 S32 A1 B0 P1 A0
IE 419 31
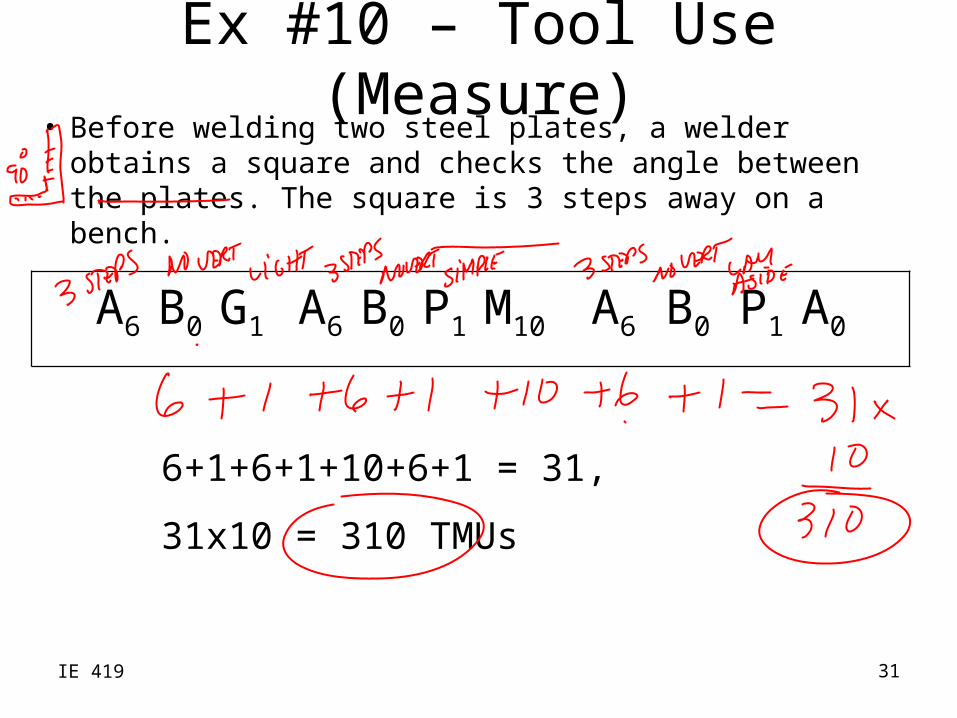
Ex #10 – Tool Use (Measure)• Before welding two steel plates, a welder obtains
a square and checks the angle between the plates. The square is 3 steps away on a bench.
6+1+6+1+10+6+1 = 31,
31x10 = 310 TMUs
A6 B0 G1 A6 B0 P1 M10 A6 B0 P1 A0