ICRA ’07 Space Robotics Workshop A Form Based Control Algorithm for Reducing the Complexity of an...
12
ICRA ’07 Space Robotics Workshop A Form Based Control Algorithm for Reducing the Complexity of an Attitude Control System at ICRA 2007 Space Robotics Workshop April 14, 2007 Cleveland State University / Industrial Space Systems Lab Northrop Grumman Space Technology Brian Fast Dr E. [email protected]
-
Upload
lesley-elliott -
Category
Documents
-
view
219 -
download
5
Transcript of ICRA ’07 Space Robotics Workshop A Form Based Control Algorithm for Reducing the Complexity of an...
ICRA ’07 Space Robotics Workshop
A Form Based Control Algorithm for
Reducing the Complexity of an Attitude Control System
at
ICRA 2007 Space Robotics Workshop
April 14, 2007
Cleveland State University / Industrial Space Systems Lab
Northrop Grumman Space Technology
Brian Fast Dr E.

ICRA ’07 Space Robotics Workshop
Problem Description• System Characteristics and ObjectiveSystem Characteristics and Objective
– Investigation complexity related to a Investigation complexity related to a flywheel based power/attitude control flywheel based power/attitude control system system
• System Architecture ConsiderationsSystem Architecture Considerations– Hardware constraintsHardware constraints
• Packaging limitationsPackaging limitations• Mounting tolerancesMounting tolerances
– Software constraintsSoftware constraints• Computation complexityComputation complexity
• Performance MetricsPerformance Metrics– Complexity of the systemComplexity of the system
• Algorithm & tuningAlgorithm & tuning– Development timeDevelopment time The focus of this work is to demonstrate that The focus of this work is to demonstrate that
a well designed control algorithm can a well designed control algorithm can dramatically reduce: the hardware dramatically reduce: the hardware
constraints, the time to test and debug, and constraints, the time to test and debug, and the cost to develop a system.the cost to develop a system.

ICRA ’07 Space Robotics Workshop
Benefits & ObjectivesBenefits & Objectives• Increased life time Increased life time
compared to batteriescompared to batteries• Improved system Improved system
characteristics characteristics – state of chargestate of charge
• Increased charge and Increased charge and discharge capabilitiesdischarge capabilities
• Dual use system Dual use system – power and attitude power and attitude
controlcontrol• Reduces the need for Reduces the need for
propellant propellant for attitude controlfor attitude control
NASA-GRC

ICRA ’07 Space Robotics Workshop
A Three Degree of Freedom Satellite Attitude Control System
• Four reaction wheels Four reaction wheels mounted in a tetrahedron mounted in a tetrahedron configurationconfiguration
• Assumptions: Assumptions: – Imaging spacecraftImaging spacecraft– Camera is mounted at the Camera is mounted at the
bottom of the spacecraftbottom of the spacecraft– Global reference frame is Global reference frame is
at the bottom of the at the bottom of the satellitesatellite
– Reaction wheels are not Reaction wheels are not mounted in the global mounted in the global reference framereference frame

ICRA ’07 Space Robotics Workshop
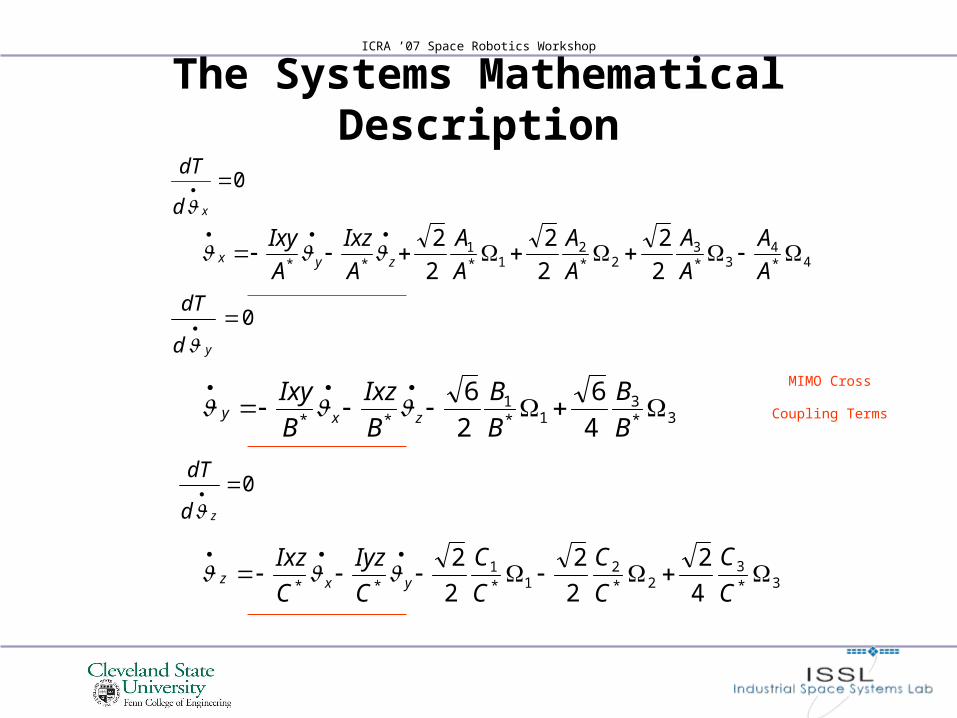
The Systems Mathematical Description
4321 TTTTTTKE p
Tpppp wIwT2
1
zyxpw
IzzIyzIxz
IyzIyyIxy
IxzIxyIxx
I p
Tnnnn wIwT2
1
1111 4
2
2
3
2
2
2
2zyxw
222 2
2
2
2zyxw
33334
2
4
6
2
2zyxw
zyxw 44
4,3,2,1;
00
00
00
n
C
B
A
I
n
n
n
n
ICRA ’07 Space Robotics Workshop
The Systems Mathematical Description
0
xd
dT
4*4
3*3
2*2
1*1
** 2
2
2
2
2
2
A
A
A
A
A
A
A
A
A
Ixz
A
Ixyzyx
0
yd
dT
3*3
1*1
** 4
6
2
6
B
B
B
B
B
Ixz
B
Ixyzxy
0
zd
dT
3*3
2*2
1*1
** 4
2
2
2
2
2
C
C
C
C
C
C
C
Iyz
C
Ixzyxz
MIMO Cross
Coupling Terms
ICRA ’07 Space Robotics Workshop
A General Form of a Problem
The ability to systematically design a control algorithm to account for complex The ability to systematically design a control algorithm to account for complex system dynamics will dramatically speed up the development time and reduce system dynamics will dramatically speed up the development time and reduce
the number of hardware constraints. By approximating the system dynamics the the number of hardware constraints. By approximating the system dynamics the algorithm is capable of compensating for unknown and time-varying parameters, algorithm is capable of compensating for unknown and time-varying parameters,
nonlinearities, and the cross coupling terms in MIMO systems. nonlinearities, and the cross coupling terms in MIMO systems.
)()()(
tbutfdt
tydn
n
)()(
)( tbudt
tydtf
n
n
)()()()(
tbutwtgdt
tydn
n
ICRA ’07 Space Robotics Workshop
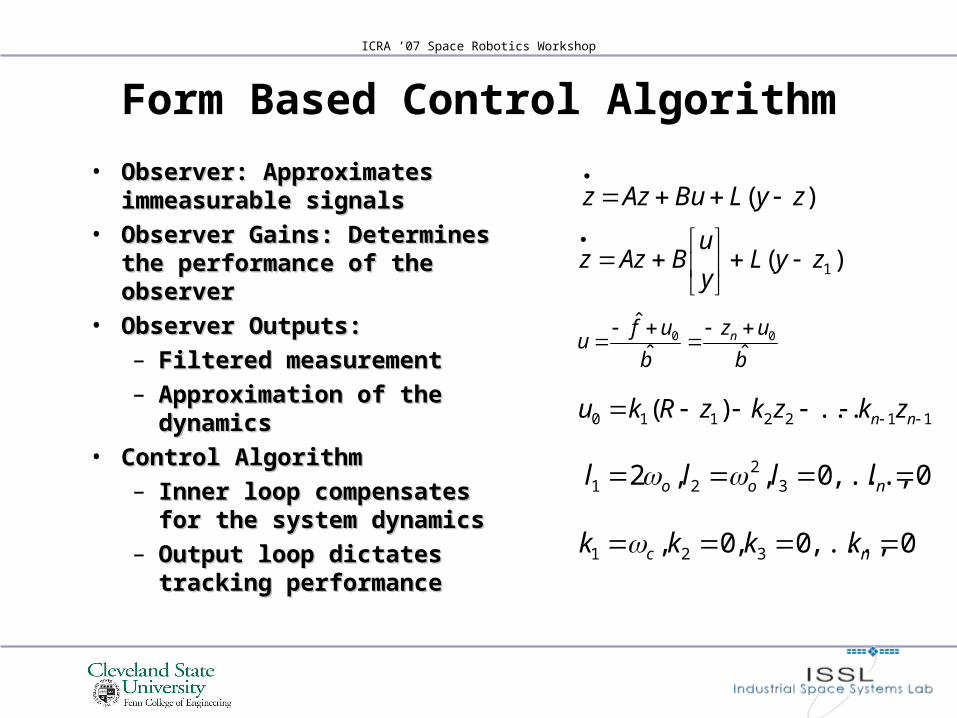
Form Based Control Algorithm
• Observer: Approximates Observer: Approximates immeasurable signalsimmeasurable signals
• Observer Gains: Observer Gains: Determines the Determines the performance of the performance of the observerobserver
• Observer Outputs: Observer Outputs: – Filtered measurementFiltered measurement– Approximation of the Approximation of the
dynamicsdynamics• Control AlgorithmControl Algorithm
– Inner loop compensates Inner loop compensates for the system dynamicsfor the system dynamics
– Output loop dictates Output loop dictates tracking performancetracking performance
b
uz
b
ufu n
ˆˆ
ˆ00
)( zyLBuAzz
1122110 ...)( nn zkzkzRku
)( 1zyLy
uBAzz
0,...,0,,2 32
21 noo llll
0,...,0,0, 321 nc kkkk

ICRA ’07 Space Robotics Workshop
Simulation Results3DOF Satellite Attitude Control
0 2 4 6 8 10 12 14-50
0
50
100Angular Position
x [d
eg]
0 2 4 6 8 10 12 14-50
0
50
100
y [d
eg]
0 2 4 6 8 10 12 14-50
0
50
100
Time [s]
z [d
eg]
0 2 4 6 8 10 12 14-2
0
2
4Position Error
x E
rror
0 2 4 6 8 10 12 14-2
0
2
4
y E
rror
0 2 4 6 8 10 12 14-2
0
2
Time [s]
z E
rror

ICRA ’07 Space Robotics Workshop
Simulation Results3DOF Satellite Attitude Control
0 2 4 6 8 10 12 14-50
0
50
100Angular Position
x [d
eg]
0 2 4 6 8 10 12 14-50
0
50
100
y [d
eg]
0 2 4 6 8 10 12 14-50
0
50
100
Time [s]
z [d
eg]
2 4 6 8 10 12
1000
1500
2000
Wheel Velocity
w1
[rpm
]
2 4 6 8 10 12
-1000
-500
0
w2
[rpm
]2 4 6 8 10 12
0
1000
2000
w3
[rpm
]
0 2 4 6 8 10 12 141498
1500
1502
Time [s]
w4
[rpm
]

ICRA ’07 Space Robotics Workshop
Algorithm Summary & Conclusions
• Generates a good approximation of the system Generates a good approximation of the system dynamicsdynamics– Approximates unknown parameters, states, Approximates unknown parameters, states,
disturbances, and coupling between MIMO systemsdisturbances, and coupling between MIMO systems• Requires minimal information about the plantRequires minimal information about the plant• Mathematically elegantMathematically elegant
– Increased confidence in the designIncreased confidence in the design– Good for computationally starved systems or Good for computationally starved systems or
systems which require a large control frequency systems which require a large control frequency – Parallel nature allows multiple processes to be Parallel nature allows multiple processes to be
controller simultaneously controller simultaneously • Constraints Constraints
– The available control effort is large enough to The available control effort is large enough to perform the desired operationperform the desired operation
– The system does not have a large time delayThe system does not have a large time delay

ICRA ’07 Space Robotics Workshop
Problem Summary & Conclusions
• Flexibility when designing the system architectureFlexibility when designing the system architecture– More flexibility packaging the system by not More flexibility packaging the system by not
having to be as concerned about the specific having to be as concerned about the specific alignmentalignment
• Decreased development timeDecreased development time– Less system parameters to identifyLess system parameters to identify– Accounts for cross coupling termsAccounts for cross coupling terms– Systematic approach to improving the Systematic approach to improving the
performanceperformance• Minimal computational overheadMinimal computational overhead