I Dynamic Analysis of the Afterbody of a Ship—Toward ... · PDF filedetermination of the...
16
io THE SJ3CIETV OF NAVAL ARCHITECTSAND MARINE ENGINEERS ~,%.. ,,tc,$ One WorldTradeCenter, Suite1369,New York,N,Y.10048 $’ ‘+ PaPer tobe Presentedatthe SIMPVib,Wk,n5yrnPos{”m 41! ~ Arlington, v..,October1&17, 1978 z ~ ?+, ~ “% JO w .ss.~ I } Dynamic Analysis of the Afterbody of a Ship—Toward! a Successful Correlation Between Analytical and Experimental Results J.-L. Armand, Member, and P. Orsaro, Visitor, Institut de Recherches de la Construction Navale, Paris O. Robert, Visitor, Althsom-Atlantiq ue, St, Nazaire, France ABSTRACT Calculations for predicting propeller- induced ship vibrations at the design stage involve the determination of four essential factors: rigidity, mass, damping and excitation, which the paper reviews separately. It is concluded that, although complex structural models yield a good approximation of the rigidity as well as the structural mass of the ship, there is on the other hand a lack of fundamental knowledge of added mass, damping and excitation forces? and that this defi- ciency is being filled by simplified methods which are often questionable. However, where it is possible to deter- mine the added masses with reasonable approximation, a mass-rigidity model of the structure will permit the reliable determination of the ship! s natural frequencies and modes . Also, difficulties inherent to any full-scale measurement are pointed out, and serve to partly explain poor corre- lations between calculations and measu- rements as have been recently reported in the literature. It is concluded that prediction of the actual vibration behaviour of a ship under service conditions is not possible at present. However, the response of the structure to a single vertical force of given intensity applied at the proper location, for arbitrarily-chosen viscous damping, can simulate, within the approxi- mations introduced, the results of a full-scale exciter test, and may allow potentially dangerous frequencies to be recognised so as to permit a reliable choice of the number of propeller blades. The actual case of a 122,000 cubic meters LNG carrier is studied in detail, and serves to highlight some of the problems encountered at the computational as well as the experimental level. INTRODUCTION Vibration of ships is an ever-present problem, which has in the recent past received more and more attention. The increase in the flexibility of ship structures has been accompanied by an increase in the propulsion power, result in high vibrational levels with various adverse effects both upon the structure and equipment of the ship and upon the comfort of passengers and crew. AlthouQ much research has gone into the developm of mathematical models and the use of sophisticated computer programs for dynal analysis of these models, there are stil: grey areas , the neglect of which can lea, to disastrous errors in prediction. It is the p“i-pose of this paper to review the various assumptions introduce< in analytical models used for the studv of prop> ller-indu=ed vibrations, and t; show their influence on the final results of the calculation, but also to stress some of the difficulties inherent to any full-scale experimental verification. Imprecision in the measured data cannot be avoided due to various factors, and result in hardly convincing correlations, even for the most sophisticated mathemati models and the most carefully planned and recorded experiments. Progress in this domain is dependent on a better knowledge of all the assumpti involved both for the analytical model an the experimental apparatus. The case of a 122,000 cubic meters LNG carrier, for which both extensive calculations and measurements have been conducted, serves to illuminate the above remarks. THE MATHEMATICAL MODEL The dynamic analysis of any linear elastic structure, be it represented by a highly sophisticated finite element model or a simple spring-mass system, generally consists of two steps. -First, the eigenvalues and corres- ponding eigenmodes of the system are calculated from the sole knowledge of the stiffness and inertia (mass) charac- teristics of the system, since it is common (and justified) practice to neglect the effect of damping on the free vibration behaviour within the .+ - assumption of linearity. -The response of the system to any given excitation i~ then computed ~~ 1.!- 1 —.. .-.—
Transcript of I Dynamic Analysis of the Afterbody of a Ship—Toward ... · PDF filedetermination of the...

io THE SJ3CIETVOF NAVAL ARCHITECTSAND MARINE ENGINEERS~,%..,,tc,$ One WorldTradeCenter,Suite1369,New York,N,Y.10048
$’ ‘+ PaPertobePresentedat the SIMPVib,Wk,n5yrnPos{”m
41!
~ Arlington,v..,October1&17, 1978z ~?+, ~
“%JO
w .ss.~
I} Dynamic Analysis of the Afterbody of a Ship—Toward!
a Successful Correlation Between Analytical andExperimental ResultsJ.-L. Armand, Member, and P. Orsaro, Visitor,Institut de Recherches de la Construction Navale, Paris
O. Robert, Visitor, Althsom-Atlantiq ue, St, Nazaire, France
ABSTRACT
Calculations for predicting propeller-induced ship vibrations at the designstage involve the determination of fouressential factors: rigidity, mass, dampingand excitation, which the paper reviewsseparately. It is concluded that, althoughcomplex structural models yield a goodapproximation of the rigidity as wellas the structural mass of the ship, thereis on the other hand a lack of fundamentalknowledge of added mass, damping andexcitation forces? and that this defi-ciency is being filled by simplifiedmethods which are often questionable.However, where it is possible to deter-mine the added masses with reasonableapproximation, a mass-rigidity model ofthe structure will permit the reliabledetermination of the ship! s naturalfrequencies and modes .
Also, difficulties inherent to anyfull-scale measurement are pointed out,and serve to partly explain poor corre-lations between calculations and measu-rements as have been recently reportedin the literature.
It is concluded that prediction ofthe actual vibration behaviour of a shipunder service conditions is not possibleat present. However, the response ofthe structure to a single vertical forceof given intensity applied at the properlocation, for arbitrarily-chosen viscousdamping, can simulate, within the approxi-mations introduced, the results of afull-scale exciter test, and may allowpotentially dangerous frequencies to berecognised so as to permit a reliablechoice of the number of propeller blades.
The actual case of a 122,000 cubicmeters LNG carrier is studied in detail,and serves to highlight some of theproblems encountered at the computationalas well as the experimental level.
INTRODUCTION
Vibration of ships is an ever-presentproblem, which has in the recent pastreceived more and more attention. Theincrease in the flexibility of ship
structures has been accompanied by anincrease in the propulsion power, resultin high vibrational levels with variousadverse effects both upon the structureand equipment of the ship and upon thecomfort of passengers and crew. AlthouQmuch research has gone into the developmof mathematical models and the use ofsophisticated computer programs for dynalanalysis of these models, there are stil:grey areas , the neglect of which can lea,to disastrous errors in prediction.
It is the p“i-pose of this paper toreview the various assumptions introduce<in analytical models used for the studvof prop> ller-indu=ed vibrations, and t;show their influence on the final resultsof the calculation, but also to stresssome of the difficulties inherent toany full-scale experimental verification.Imprecision in the measured data cannotbe avoided due to various factors, andresult in hardly convincing correlations,even for the most sophisticated mathematimodels and the most carefully plannedand recorded experiments.
Progress in this domain is dependenton a better knowledge of all the assumptiinvolved both for the analytical model anthe experimental apparatus. The case ofa 122,000 cubic meters LNG carrier, forwhich both extensive calculations andmeasurements have been conducted, servesto illuminate the above remarks.
THE MATHEMATICAL MODEL
The dynamic analysis of any linearelastic structure, be it represented bya highly sophisticated finite elementmodel or a simple spring-mass system,generally consists of two steps.
-First, the eigenvalues and corres-ponding eigenmodes of the system arecalculated from the sole knowledge ofthe stiffness and inertia (mass) charac-teristics of the system, since it iscommon (and justified) practice toneglect the effect of damping on thefree vibration behaviour within the .+ -assumption of linearity.
-The response of the system toany given excitation i~ then computed ~~
1.!-1
—.. .-.—

using the mode superposition procedure,requiring a knowledge of the excitingforces as well as of the damping charac-teristics of the system.
Onl>- in case one follows the aboves:eps , which involve a knowledge of the;:iffness. inertia. damuine characteristicso: the s~-stem as well a; o~ the excitingforces applied to it, can one attach avalue to the maximum displacement oracceleration of a given point of thestructure under service conditions.
On the other hand, knowledge ofthe stiffness and inertia characteris-tics of the system is sufficient toobtain the eigenfrequencies and eigenmodesof the structure and to reasonablysimulate the results of an exciter testcovering any given frequency range,provided that reasonable values forthe damping factoT in each mode havebeen assumed, and taking into accountthe fact that the magnitude and directionof the exciting force is in such a caseknown with a good pTecision.
We will show in what follows thatthe latter approach is the only oneto be reasonably undertaken consideringour present knowledge of the four factors :stiffness, inertia, damping and excitingforces, which we will now study separa-tely.
1. Stiffness
During the recent past, the finiteelement method of analysis has rapidlybecome a very popular technique for thecomputer solution of complex problemsin structural mechanics. Basically, themethod can be understood as an extensionof earlier established analysis techni-ques, in which a structure is representedas an assemblage of discrete truss andbeam elements. The same matrix algebraprocedures are used, but instead oftruss and beam members, finite elementsare employed to represent regions ofplane stress, plane strain, axisymmetric,three-dimensional , plate or shell beha -viour.
A three-dimensional finite elementmodel of the complete ship structureusually consists of membrane elements,and invol”es a considerable extent ofstructural lumping to account for theextreme complexity of the actual shipstructure. Examples of models usedin static analysis are presented byRoeren (1), together with an extensiveliterature survey of pioneering papersUp to 1969. More recently, modelsused in dynamic analysis may be foundin the papers by Volcy et al. (2),Johannesen et al. (3), Ris~(4) ,Kavlie and Aas~d (5), among others,some of these authors presentingextremely elaborate models involving
thousands of degrees of freedom. A commonfeature to all the models used is that theaft part of the ship is represented usinga fine mesh, which gets progressivelycoarser, the fore part being representedeither by a simple beam or a crude three-dimensional prismatic model.
Increasing use of data generationprocedures linked to sophisticated graphicaldevices has nermitted to considerably reducethe actual t~rne iivoived in building’ themodel as well as to diminish the risk oferrors , leading to ever precise models.It is therefore only fair to state that,at the present stage, correctly evaluatingthe stiffness of a ship structure is onlya matter of mmputational effort, and thatmost actual models yield quite satisfactoryknowledge of the stiffness factor.
In the case of a 122,000 cubic metersLNG carrier, the complete ship structurehas been idealised “sing a three-dimensionalfinite element model of the afterbody(aft peak, engine room and superstructures) ,which is progressively connected to a two-dimensional model of the fore part througha transition part; the fore part is assumedto behave as a tw-dimensional structureby reason of its slenderness.
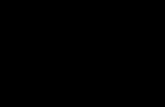
The complete structure is made up ofsix sub-structures. Fig. 1 depicts modelsof the aft peak and of the engine roomso as to give an idea of the fineness ofthe mesh used.
As we are solely interested insymmetrical vibrations, neglectingtransversal and torsional modes, onlyone half of the ship has been considered,and appropriate boundary conditionsprescribed in the centerline and forthe model of the fore part to take thecondition of symmetry into account.
The conmlete model consists of:2193 element; (beams and membrane elements)608 nodes1717 degrees of freedom.
For the solution of the eigenvalueproblem, the model has been reduced to353 dynamic unknowns by static condensationtechniques.
2. Mass
Tbe inertia characteristics of thesystem consist of
i/the structural mass, which isautomatically computed at the elementlevel and then distributed among thenodes once the density and the iross -sectional area (beams) or equivalentthickness (stiffened or unstiffenedplates] have been given. It is easy tocheck that the structural mass distributionalongship obtained in this manner coincideswith that given by the bull mass curve,
M-2
&––j.
‘i

Fig. 1: Beam and plate model of the aft peak and of the engine roomused for the dynamic analysis of a 122,000 cubic mete=sLNG carrier.
familiar to every naval architect.
ii/the mass of equipment and machi -
~’;h~~!n~sm~~~~~e~t the same location.Into the model In the
iii/the deadweight, consisting ofcargo, fuel , water, stores , ballast andso on, also entered in the”form of point(lumped) masses distributed among the nodeslocated on the boundaries of the compart-ments to which these items are located.
iv/the added (hydrodynamic) mass :the influence of the hydrodynamic pres-sure on the submerged surface of thevibrating hull can be taken into accountthrough an additional mass term in theusual equations of motion of the structure,as was first shown by Lewis (6) andLockwood Taylor (7). This mass term,which takes into account the effect ofimmersion, is known as the added (virtual)
mass of the entrained water. Itsimportance should not be underestimated,as is too often the case.
The classical approach consists individing the ship hull into sections,each with uniform cross-sectional area,around which the flow of water is assumedto be two-dimensional . Correctionsallowing for three-dimensional effectsare then introduced through the so-calledreduction factor J, defined as the ratiobetween the kineti’ energy of the exactthree-dimensional flow and the kineticenergy of the approximate two-dimensionalflow, known only approximately and subjectedto empirical corrections.
It has now become obvious (8) thatsuch an approach, valid for the firstfew modes of vibration of the hull girder,for which the cross-section may safely beassumed to remain undeformed, is not
L-M-3

. . . . . . . . . . ,.irh the refined three-dimensio-. .. . . . <::.::? elenent structural models whichL:e ;resently used to obtain the higherfrequencies of vibrational modes of interest,in the ~ange of the propeller blades fre-quency, in which deformation of the shipcross-section plays a paramount role.
A three-dimensional finite elementdiscretization of the fluid domain as wellaPPears tO be necessary in order to obtainaccurate values of the frequencies ofvibration in the range of interest.By using fluid elements with curvedboundaries so as to allow a perfectfit with the immersed pa-t of the hull,such as those first described by Zien-kiewicz and Newton (9), the connectionbetween water and the most complex structu-ral geometries is rather easy to describe.Since only one degree of freedom pernode (the dynamic pressure) has to beconsidered, the computer time neededfor the effective calculation of theadded mass matrix is negligible in compa-rison with the time required for thecomplete structural analysis (TO).
Fig. 2 shows the discretized modelof the water surrounding the hull of theLNG carrier already considered. Twenty-node isoparametric finite elements havebeen used.
The complete model of the liquiddomain includes 6 sub-domains and isentirely described “sing37Z twenty-node isoparametric fluid elements2229 nodes with one degree of freedomper node283 nodes in contact with the hull .
3. Damping
Contrarily to what has been saidabove concerning rigidity and mass, thepresent knowledge we have of dampingphenomena arising in complex structurescannot be satisfactorily nmdelled, asthere appears to be a nearly completelack of knowledge concerning this topic.
In the case of a structure as complexas a ship, distinction should be madebetween
rh; main sources of joint d;mp:working, slipping and fraving [ping cormreview of
d as hysteret!. ‘Hyste-i/the structural dampin , w lch is
commonly treateresis of the structural joints-is mu=hhigher than that of the shiD hull material
ing are-, ...e If Overlap -
lected elements. An exhaustive: hull damping of internal origin
may be found in a paper hy Betts et al. (1— 1).
Fig. 2: Finite element discretization of the water surroundinga vibrating LNG carrier.
M-4 -–

j.i/thecargo damping, of which evenless is known. The nature of the cargohas a majoi- influence on the damping.Damping of solid ca=go may be treatedas hysteretic, whereas damping of liquidcargo is of viscous type.
iiifthe hydrodynamic, or exte Trial ~
damping,, which may in turn be ‘onve -nlently dlv~ded into four components :water friction, resistance, radiationand generation of surface waves. Al Ifour components are considered to beof the viscous t~ue. It is to benoted that frequi;=y has a major influ-ence on the last three components.
Quantitative introduction ofdamping in a model is thereforeextremely difficult and whateversolution is finally retained can neverpretend to be all that satisfying.The above remark senres as a i“stifica -tion of the cu7rent rmactice. ”now.r–
universally accepted.
Only global damping is considered, andassumed to be of linear viscous type.It is introduced in the model throughthe so-called damping matrix.
The complete set of equations ofmotion of the complete struct”=e maynow be written in matrix form as
[M]ij+[C]4 +[K]q = Q(t)
equation in which
[If]:LS the mass matrix[C]is the damping matrixrKlis the stiffness matrix“q”is the vector of (unknown) nodal
displacementsQ(t) is the vector of (known) applied
nodal forces
Moreover, damping is assumed tobe proportional, an assumption whichresults in decoupling the set ofequations of motion (1) when the so-called normal coordinates r areintroduced. System (1) may then berewritten under the form of n inde-pendent equations , n being the totalnumber of degrees of freedom of thestructure,
(1)
fi+ 2 Li Ui fi + u: ri = Ri(t)
i=l, 2,...n (2)
Ci is the damping coefficient for the
i-th mode.
It can be shown that this assump-tion is valid if the damping matrix isa linear combination of the stiffnessand mass matrix:
c=c YK+OM (3)
Hylarides (12) assumes a viscousdamping which is proportional to thestiffness, i.e. lets B equal to zeroin Eq. (3).
In “sml practice, damping ischaracterized as a percentage ofcritical danmine for each mode. Thisis obviously’ no; a very good assumption,since it leads to a global value ofdamping which is the same everywherein the structure. Moreover, mostcomputations until now have consideredthe same value for this coefficient ineach mode, when it should be obviousthat modal damping cannot have the samevalue in vibrations of the hull eirderor in local vibrations of the su~e~struct”re,for instance.
The simplifying assumptions describedabove may seem quite arbitrary. However,it should be pointed o“t that, underour present state of knowledge of dampingphenomena, a more elaborate introductionof damping, e.g. via a full damping matrixobtained from experimental tests on similarships, wodd seriously increase the computa-tional effort without real comparableincrease in the precision of the solution.
Such assumptions are the reflect ofa compromise between a realisti’ model anda model whi=h can be apprehended on a com-putational level, a situation a=ising invarious modern disciplines. This philoso-phy may be endlessly discussed. We willonly conclude that the c“rre”t approachcannot entirely satisfy the engineer whois above all concerned about reliableresults. This engineer will wish thatmore research of both fundamental andapplied natu~e. be undertaken so aS to =,Jn-firm the val~d~ty of the linear viscousmodel. In case it is proven to bea good assumption, it will then be thetask of the researcher to characterizevalues of the damping coefficient invarious modes for ships of a comparablenature, a task which has yet to be under-taken.
4. Excitation
Since the determination of theresponse of the structural system to a givenexcitation requires knowledge of bothdamping and exciting forces, it is appa-rent by now that a prediction of thebehaviour of a ship under service conditionsor even a simple exciter test, i.e. thecomputation of displacements and accelera-tions at specified points of the sh, p, issimply unrealistic, no matter to what degreeof precision are the exciting forcesknown. On the other hand, it might alsobe said that comparison of the results ofcalculations and measurements yield, byidentification, for a given excitation,useful values of the modal damping coefficientswhich could be stored after they have beensorted according to ship type and modecharacteristics , therefore constituting
1.
LI
M-5

some sort of a catalog of dampingcoefficients which could be used infuture calculations of similar shiptYDes An exciter test Drovides theid~al setting for such c;ri-elation.On the other hand, the situation isnot quite so simple when actualforces encountered during serviceconditions are to be considered.
For large, modern ships, thepropeller is the source of the mainexcitation forces. Since thepropeller works in an meven wake field,thrust and torque variations aretransmitted to shaft and bearings Atthe same time, propeller blade cavitationcauses large prkssbre fluctuations onthe hull . Although of the same origin,the fluctuating loading and the fluctua-ting hull surface pressures are of quitedifferent character and request differenttreatments for their computation as wellas for their introduction into themodel.
i/Dynamic loading on the propeller:its calculat~on lmvlies that of the nres -sure distribution ;n the pi-opeller”b~adeduring one full revolution for a givenpropeller geometry and a given hullwake field.
The traditional approach “sing theso-called lifting line theory has beenmodified into so-called liftingsurface methods featuring a soundermathematical basis , but still makingextensive use of correction formulaeand tables based an systematic modeltests.
Although some of the assumptionsintroduced are quite restrictive, suchmethods give reasonably accurate “al”esof the dynamic loading on the propeller.Integration of those yields the resultingforces and moments acting on the shaftingsystem, which are introduced into themodel at the nodes coinciding with thebearings.
ii/PTOpeller-induced hull surfacefressure: the Ioadlng on the propeller1s partly transmitted to the hull throughthe surrounding water. The main problemis that of finding the propeller-inducedhull surface pressure under the restrictiveassumptions made when calculating theloading on the propeller, since it hadbeen assumed that the pressure distribu-tion on a blade was not affected by thepresence of hull and water surface. Theintroduction of solid boundaries and afree surface will therefore chan~e thepressure field in a way to be pr~cisedin a quantitative manner.
Various analytical approaches havebeen proposed. Without going intodetails, it suffices here to referencethe works of Breslin and Eng(13) andVorus (14), both offering an elaborate
mathematical t~eatment of the problem.However, a numerical solution of thecomplete problem, in view of the extremecomplexity in shape of the aft part ofa ship as “en az of the nature of themixed boundary conditions, appears tobe very tedious b“t also very unreliable.This explains why the empirical approachvia the so-called solid boundary factorS is still very popular with naval archi-tects.
Although the amplitude of thepressure pulses decreases rapidlywith the distance from the source, thepressure forces from the propeller maystill be iIIIDOrtant‘e”enrelatively farfrom the pr~pelle~ plane. It sho;ldalso be remembered that the pressurepulses propagate with the velocity ofsound in water, and therefore thatpressure pulses at points away from thepropeller exhibit a phase shift with respectto the reference signal at the origin.
It may therefore be concluded thatthe present knowledge of propeller-inducedhull pressures is far from being satisfac-tory . The p=ecision cannot be comparedwith that obtained for the dynamic loadingon the propeller.
Even if the dynamic p=essu~e wereknown at each point of the surface of thehull , practical input of all this informa-tion at each node of the bull as well asprocessing the data to obtain the responseof the str”ct”re would represent a formi-dable, if not prohibitive, task. Theonly way to obtain the value of nodalforces is to integrate the pressure overportions of a complex surface. Theresulting dynamic loading “ill exhibitdifferent phases in different points,and practically the only way to obtainthe response of the str”ct”re is bysurimposing the individwil response toa single hzntmnic excitation appliedsuccessively to ea’h degree of freedomof the hull, leading to fantasticcomputation times.
By contrast, the response to thepropeller forces is easy to obtain.However, it has not been proven thatthe response to the propeller-inducedhull surface pressure is negligiblein comparison with the response to thedynamic loading on the propeller itself,and both contributions should beconsidered.
EXPERIMENTAL INVESTIGATIONS
The dynamic behavio”r of a linearstructure is completely described bythe transfer function or response ampli-tude operator concept.
Measurement of the transfer functionis well known practi’e. However , in thecase of a ship, it involves particularaspects d“e to the large size and complex i-ty of the structure considered.
M-6I
F=-__21..
1

These are:-choice of the exciter and of theexcitation type-choice of exciter location-choice of an experimental procedureinsuring the scientific quality ofmeasurements. Among various qualityfactors, attention has been mainlypaid to experimental results reproduc-ibility which has to be checked throughboth time and space variations.
Before any correlation study betweentheoretical and experimental data isundertaken, the experimental procedureshould allow for satisfactory checkingof basic theoretical assumptions.
Experimental procedure
i/Exciter and excitation
The large mass and stiffness of thestructure under investigation requiresa powerful exciter, the amplitude of theexciting force being preferably largerthan 20 kN (roughly 2 tons) in thefrequency range of interest.
Two different types of exciter havebeen used up to now by the shipyard incharge of measurement:
-hydraulic exciter: a large mass(5 tons) driven by a hydraulic jack upgenerates inertia forces. The motionof the mass is controlled by electronicdevices through a servo valve.
Advantages of this system arenumerous:-easy control of the excitation usinglow frequency signal generator-possibility of generating high excitationforces at very low frequency by increasingthe amplitude of motion-the time needed for a complete experimentcan be shortened bv usine random. whitenoise type, excita~ion aid by ob~ainingthe results through statistical analysisby digital signal processing.
However, the sophistication of theequipment designed for laboratory workis not adapted to sea trials environment;furthermore, when this type of exciteris used at sea, ship motion, and mainlyroll , can lead to difficulties as far asthe guiding system of the mass is concer-ned.
-unbalanced-mass exciter: a consta.nt-speed electric motor drives two unbalancedmasses through an electromagnetic clutch.This thyristor controlled clutch issuitable for electronic remote controlof rotation speed of the masses andtherefore of excitation frequency.
The excitation force is basicallysinusoidal, but a special remote controldevice allows slow frequency sweep overthe whole frequency range.
The gene=ated force is proportionalto the sqware of the frequency, and thestructure of the exciter is designed fora maximum load of 196 kN (roughly 20 tons) .The maximum frequency at which a force ofthis magnitude is generated is function ofthe unbalanced masses . Two differentsets of masses may be used. leading totwo different max’im”m freq~encies ,-that is14 Hz for large masses, 25 Hz for smallmasses.
This heavy duty type of excite= wasselected for the experimental analysispresented here though it is “ot suitablefor very low frequency excitation due tothe weakness (belo” 3 Hz) of the excitingforce leading to a poor signal to noiseratio.
This type of exciter has been develo-ped by Bureau Veritas; model E 20,000was used for this experiment.
ii/Exciter location
In order to excite most of thecalculated natural modes, it was decidedto locate the exciter at the extremeaft end of poop deck, the excitationforces acting vertically. Besides, thislocation is adapted to a rough simulationof actual propeller-induced surface forces,and the experimental analysis is thenexpected to supply actual criticalfrequencies of the structure as far aspropeller-excited vibrations are concerned.
In order to insure proper transmis-sion of exciting forces to the structure,the exciter is welded on the deck. Localreinforcements were also decided in orderto increase the local stiffness of thesupporting structure and eliminate localvibrations of a parasitic nature.
iii/Pick-ups location
Above 3 Hz, most of the mode shapesmay be reasonably identified by measuringthe vertical deformation of engine roomdouble bottom, of poop and upper deck, andthe fore and aft deformation of deckhousefront bulkhead. Fig. 3 shows the locationof the 14 selected pick-ups.
Fig. 3: Transducers location
M-7
L

iv/ Measuring equipment
Vibrations are detected by servo-~cce]. erometers delivering a loti impedance
signal with a sensitivity of 10U m [y-)
[g = gravity acceleration 9.91 m.s )The signals go through a multichannelamplifier that multiplies sensitivityby a factor 10 and their through low-pass filters with cut off frequency of32 Hz in order to eliminate high fre-quency noise . A multi-channel magnetic-tape recorder stores resulting experi-mental data.
In order to get a phase and frequencyreference of excitation force, a photo-cell delivers an electric pulse everytime unbalanced masses of the exciterpass through a known position, theangular position of which is refered toexcitation force maximum amplitude (= 0°phase reference) .
While measuring, this rpm pulsesignal is fed into a digital frequencymeter that gives a precise measurementof excitation frequency when pure si”u-so~dal testing, with step by step increaseof frequency, is carried out.
VI Measurement program
An extensive measurement program wasdecided in order to check theoreticalcalculation assumptions and reproducibil-ity of experimental data through varia-tions of excitation mode and experimentalconditions .
First, in order to measure a properinfluence of water added mass, all theexperiments ZIreto be carried out inopen sea with a depth of water helo” keellarger than 50m according to theoreticalcalculation conditions.
Previous similar experimental inves-tigations performed on the ~ame *hip inharbor alongside the quay and in open seahad already shown drastic change intransfer functions pattern.
- Checking of theoretical asswnptions :
The main theoretical assumption isthe linearity assumption which is equi-valent to the assumption of viscousdamping.
Though actual damping is presumablynot linear, small value of steel struc-ture damping should confirm the rightnessof this a~s.umption.
In order to check structural linearity,the experimental analysis was ..epeatedwith two different sets of unbalancedmass , the ratio of exciting forces at thesame f,.equency being 0.32. With tbe setof l<!rgemass med tbroughwt tbe eXpe-rimen!.al investigation, exciting forcereaches 20 tons at 14 Hz. With small mazs,
force is only 6.3 tons at 14 Hz.
For the linearity assumption to beacceptable the transfer function shouldbe similar in both cases.
The bydroelasticity problem is formulatedin such a way that there is no radiationcondition at infinity. In other words,surface wave generation is neglected andfluid dynamics is only described by asingle scalar pressure term.
As a consequence of this assumption,consist e!ltwith high frequency vibIationcompared to seakeeping vibration, thereshould be no effect of ship forward speedon added mass and so on structural transferfunction. Experiments are then to berepeated at maximum speed just after havingcut off shaft power, during tbe ship speed-ing down and once more with zero forwardspeed.
- Reproducibility of experimental data
The way experimental data reproducib-ility ‘an be guaranted is twofold :
* Time variations : measuring processis to be repeated in similar envi-ronmental conditions
* Space variations : measurements areto be carried out on two sister shipswhich are refered to as ship 1 andship 2 in the text.
Loading cunditi~ns of both ships areof premium importance for the results to becomparable .
For both ships, displacement and trimare similar:
Aft draft :10.5 m
Fore draft : 7.5 m
So that there is no change of wateradded mass distribution from ship 1 toship 2.
Fig. 4 : Water ballast weight distribution
M-% L

But, as shown Fig. 4, the waterballast weight distribution are notidentical :
In ship 1 all the cofferdams are emptybut the aft ballast is partly filled. Inship 2 the aft ballast is empty but coffer-dams are full. Nevertheless , the weightdistribution aftward of machinery roomfront bulkhead is the same for both ships.
These differences should lead tosmall modifications of the results.However, a fundamental similarity is tobe observed for theoretical predictionof ship vibration to make sense.
Ship 1 weight distribution correspondsexactly to theoretical calculation data.
- Variation of experimental procedure
Experimental invest igationswere car-ried out during official sea trials and thetime required by experiment was to beshortened as much as possible. This is,thereason why sine sweep excitation mode wasadopted. The automat ic sweeping rate ofthe exciter is about 1.4 Hz Der minute sothat a complete speeding up &r down of theexciter in the 3-1.1Hz range would lastabout 8 minutes while a pure sinusoidalexcitation mode with step by step chanf!ein frequency requires mo?e than in ho”;.However, such a step by step procedure wasperformed once in order to check that thetYPe Of excitation had no influence on theresulting transfer functions. AS .3matterof fact, due to presumably low dampingcoefficients (of the order of 1% of criticaldamping) it was felt that sweeping ratecould be too fast for low frequency reso-nance vibration to build up at maximumstationary amplitude.
AS the energy spreadover the structureis not constant in rhe frequency range ofinterest, a possible influence of sweepingmode, decreasing or increasing of excitationfrequency and force, was also to be checked.
Not to lengthen the sea trials program,the opportunity of carrying out experimentalinvestigations during mooring trials withship at anchor was taken. The calculatednatural mode shapes showing small deformationin the fore part of the ship, this proce-dure was considered acceptable if comparedto similar results obtained with shipdrifting along.
vif Data processing
It was performed by a digital proces-sing system programmed for random vibrationanalysis by Fourier transform.
The absolute value of transfer func-tions was obtained by dividing the ampli-tude of the signal at a considered freq”e”-cy by the known ampl itude of excitationforce at this frequency. For sine sweepexcitation the frequency resolution was
that of the data processor i.e. 0.16 Hz.
For pure sinusoidal excitation theresolution was selected aboard the shipat 0.1 Hz.
Between measuring period, the step bystep change in frequency was carefullycontrolled thanks to the digital frequencymeter.
The phase of transfer functions wasobtained in two steps :
First the absolute phase of a referencesignal with respect to excitation forcewas measured by analog means.
The vertical vibration at transom,close to the exciter, (pick up lV),wasselected as the reference point.
Then, the phase differences betweenall measuring points and the referencesignal were automatically obtained by thedata processor through cross spectmm cal-culations. The combination of both stepsleads to the absolute phase of all points.
Rather than providing the reader withcolumns of n“mbe=s, it seemed better toselect the significant results and to pre-sent them in graphical form.
J
Complete transfer functions are onlygiven for two characteristic points :v~rti~al vibration at transom (Iv) and 10n.g,tud,nal v>bration at wheelhouse deck (3L).
The behavior of other points is describecat resonance by means of mode shape typerepresentation.
Experimental data analysis
il Verification of theoretical ass”mpti.axand influence of experimental conditions
The linearity of structural response is,shown Fig. 5 whi=h represents absolutevalue of ship 2 reference point transferfunctions with the two different sets ofunbalanced mass. Both curves are almost iden-.tical except in the 8.5 - 9 Hz region whereslight discrepancies are noticeable. Anexplanation for these discrepancies will beproposed later.
As far as effect of forward speed onadded mass distribution is concerned, theobserved differences between experimental “results obtained with an average speed of12 knots and with the ship at rest are withifiexperimental accuracy. In the propellerinduced vibration frequency range, free s“r-face influence on added mass distribution isthen presumably negligible. L
So is the influence of mooring lineswhen the ship is anchored.
Regarding the influence of excitationmode, sine sweep or pure sinusoldal,on the

results, it seems that the slight observeddiscrepancies can be explained by the dif-ference in frequency resolution. For ins-tance, the finer resolution of pure sinu-soidal excitation mode can lead to theseparation of what was observed as i singlere; onance peak with sine sweep mode, inti
r
two adjscent peaks,
Fig. 5. Structural Linearity Check (Ship 2)
— Large unbalanced mass
----- Small unbalanced mass
ii/ Transfer functions analys is
Fig. 6 and 7 show reference point(vertical vibration at transom) and wheel-house (longitudinal vibration) transferfunctions. Continuous linescorrespond toship 1 while dotted lines describe ship 2dynamic behaviour.
As a general comment, it can be obser-ved that the dynamic response of both shipsare indeed comparable in amplitude andphase.
Before analysing thse curves in detail,the covered frequency range can be decmn-posed into four regions.
a- Below 4.25 Hz : due to the type ‘ofthe exciter, a low frequency exci-tation was poor but yet a typicalresonant figure is observed.
b- Between 4.25 Hz and 6.25 Hz : bothcurves show no significant dynamicamplification.
c- Between 6 .25 Hz and 10.25 Hz. : arather high density of resonantpeaks comes out.
d- Over 10.25 Hz : the vertical stern
M-10
,,.. .. . .. .
Fig. 6. Transfer FunctionVertical Vibration at Transom(point 1“V)
Fig. 7. Transfer FunctionFore L Aft Vibration at WheelhouseDeck (Point 3L)
.
.
——

response decreases steadily while thephase tends to 180”. .Thewheelhouseresponse still shows some small variationsbut the mean phase keeps on decreasingregularly.
Ship 1 shows a resonant peak at 3.85Hz. The corresponding dynamic deformationof the whole aft structure is given Fig. 8where the upper sketch corresponds to thecosine part and the bottom one to the sinepart. The vertical deformation of the hullis typical of a high order hull girder typemode with a mode located somewhere in therear part of main deckhouse. The longitu-dinal motion of deckhouse is a geometricalconsequence of hull deformation. The nonnegligible out of phase deformation shownon sine representation may be explained bya combination of two adjacent natural modes.Tnis is confirmed by the analysis of ship 2transfer function. As a matter of fact,ship 1 curves correspond to sine sweep ex-citation mode but ship 2 was investigatedby means of pure sinusoidal excitation andthe corresponding finer frequency resolutionshows two separated peaks at 3.9 Hz and 4.1Hz. As far as mode shapes are concerned,the former peak is similar to ship 1 defor-mation while the latter peak shows an impor-tant participation of deckhouse longitudi-nal motion (see Fig.9) .
~
&z=.:—.
--------..._-...------......______
#
. ----
Fig. 8.
-- -——_ .. ..—
Ship 1 - Structural Deformations
~
-4!!5+,.,”,,,’ -
4.1HZ1’
. ....._..._.’
—....
Fig. 9. Ship 2 - Structural Deformations
The difference in water ballast weightdistribution between ship 1 and ship 2 havevery little effect on the natural frequenciesbut the mode shapes show some variations. Sodo maximum amplitudes at resonance but theinfluence of excitation type on such a lowfrequency mode may be significant as saidearlier in the text.
In the middle frequency region (6.25 -10.25 Hz) several resonant peaks are shownon the graphs :
l!Q2Z.1 w
6.7 HZ 6.6 Hz
7.5 Hz 7.75 Hz
8.2 HZ 8.3 HZ
8.7 HZ
9.3 Hz 9.2 Hz
The modal deformation corresponding toship 1 resonances are given Fig. 10 through 13.
The firsttype verticalmoving aft as
.three .modes show hull girderdeformation with two nodesfrequency increases.
M-n

.
Q.!!u
%f!!!!t--....-.,..., ,.”
6.7Hz
u
4!% —.
SHIP 1 S!r., t”rol 0,’. ,”,.,;0”,
Fig. 10
*
&.....-............---,.. ,“,,,. ”
7.5Hz
~
4!%
..........--....
~
4!!!.%.--......----...........8,2HZ ,.4,,!..
~
&
Fig. 12
Qm!K
&............................*:_:. ,i..
9.3Hz&
a
.........
............SHIP 1 Str.ct.r.l ..1.,”.,;..,
SHIP 1 s,,.<,.,., D* farm.,; ...
Fig. 11 Fig. 13
.
I.?--- —

Ship 2 modal representations are verysimilar though maximum amplitudes may bedifferent (8.2 Hz) and though natural fre-quencies are slightly shifted. An explana-tion for these differences is to be foundin weight distribution variation from ship1 to ship 2.
Ship 1 9.3 Hz resonance peak is ratherwide and may well integrate several indi-vidual natural modes such as 8.7 and 9.2 Hzpeaks observed on ship 2.
Fig. 11, 9.3 Hz modal representationshows a more intricate dynamic behaviorwith opposite phase of main deck and engineroom double bottom deformation. Ship 2 showssimilar behavior at 9.2 Hz while at 8.7 Hzthe upperdeck deformation shows four nodesfrom deckhouse front bulkhead to transombut the phases between measuring pointsare far from the ideal 0“-180” figure ofpure mode shapes.
The fast decrease of stern dynamic res-ponse after 9.3 Hz is translated in phaserepresentation by a rather steady variationtoward opposite phase between response andexcitation. Yet the longitudinal weelhouseresuonse still shows some peaks after 9.3 Hz.Suci a dynamic behavior is-typical of alocal resonance of exciter supporting struc-ture. The resonance presumably takes placearomd 8.8 Hz. As a matter of fact, it indu-ces longer vertical motion of the exciter,modifying local damping characteristics insuch a way that overall dynamic behaviormay no longer be linear about 8.8 Hz. Itmust be recalled that such non linear itieswere observed oh Fig. 3. The main conse-quence of this unexpected local resonanceis to modify natural frequencies throughdynamic COUP1 ing effect but mainly to dras-tically change the intensity of excitingforcewhich is actually transmitted to themain structure. Because of the obviouslysmall damping characteristics of this localresonance, it induces presumably an increaseof actual excitation force in the 7 - 9 Hzfrequency range but a fast decrease over9 Hz.
As a consequence, experimental datamust be analysed with carefulness in thehigh frequency range. We can simply statethat there exist several natural modesover 9 Hz. Among these slightly noticeablemodes, one can mainly distinguish :
u w10.4 Hz 10.7 Hz
12.5 Hz 11.9 Hz
Corresponding mode shapes clearlyshow shear deformation of deckhouse, whilein the lower frequency range superstruc-ture behaviour was mainly of the rigidbody motion type.
Conclusions of experimental investigations
First,experimental data analysis hasled to some theoretical assumptions veri-fication.
The second aim of this important expe-rimental campaign was to establish the basis of acorrelation study with forced vibrationcalculations.
Because of local exciter supportingstructure resonance which cannot be predictedby calculations, because of a not fine enoughfinite element representation of this localstructure, the correlation will have to bestudied within unexpected limits. Nevertheless,for the correlation to be satisfactory, thefollowing precise characteristics will haveto come out of theoretical analysis :
a-
b-
c-
d-
satisfactory correlation with 3,9 HZdynamic amplification in both frequencyand amplitude with possible influence oftwo adjacent modes at 3.8S and 4 Hz. “
clear recomition of a 4.25 - 6 Hz fre-quency ran~e with no definite dynamicamplification
in the 6.5 - 9.5 Hz range the correlationwill be mainly focused on free vibrationanalysis (natural frequencies and modeshapes) . Because of the above mentionedlocal resonance, calculated forced vibrationresponse amplitude should be smallerthan measured ones.
In the 10.4 - 13 Hz frequency range ,freevibration analysis should give severalnatural modes with high deckhouse dynamicparticipation.
COMPAR1 SON BETWEEN CALCULAT IONS AND MEASUREMENTS
Using the mathematical model describedin the first part, a free vibration analysis~:~n~len carried out by solving the conven-
eigenvalue problem : 45 natural modeshave been found between zero and 20 Hz andall those within the range of interest forthe afterbody vibrations (6 - 15 Hz) aregiven in Table 1 with their description.
We can note that most of the modes arelocated in the afterbody with a more or lessimportant participation of the different parts :aft peak, engine room and superstructures.
At this stage of the analysis (freevibrations) , it is difficult to predict themost dangerous modes of vibration for thestructure but we can compare the naturalmodes by u,5ing the concept of generalisedmass (m.=$~ M.$.), associated with mode $iand pro~or+ionhl’ to the kinetic energyof vibration. Table 1 shows that the mode .at 10.253 Hz may be the most important afterthe (local) mode at 7.014 Hz.
From the set of natural modes, it iseasy to obtain the frequency response of thestructure by modal superposition procedure
M-13L-
1

<
Mode
number
1213
1415
1617
1819
2021
2223
242s26
2728
29
Frequency
(Hz]
7.014
7.304
7.404
8.280
8.616
9.089
9.796
10.029
10.2s3
10.602
11.404
11.798
12.925
13.373
13.472
13,628
14.190
14.749
TABLE I , xatural .Ode,
Description
vertical 1...1 (ER]
vertical local (TP) . vertical [HP]
vertical (.4p.ER.FPI
vertical (AP.ER.W
vertical and longitudinal (AJ.ER.S)
vertical (Ap.ER.FP)
lo.zic. dinal (AP.ER.S]
vertical local [FP)
vertical W+ERI. longitudinal[s)
longitudinal (AP+ER+S)
longitudinal (AP.ER+S)
vertical (Ap.ERI
longitudinal [AP.ER+FP)
rertical local (ERj
,ertical (FP)
longitudinal (s] . vertical [AP,ER)
.
+ ,,
A.P. - Aft peakE,R. = Engine r...s. = Supe, str”ct. re,F.P. = Fore Pa, tT.P. . Transition part
in order to simulate measurements withharmonic exciter. We have to introducedamping in the dynamic equations of motionhere, damping is assumed to be a fraction(1%) of the modal .critical value. Such arelatively low value of damping” has beenchosen because of the ballast conditionof the ship.
Fig. 14 - 15 show the frequencyresponse at transom (in vertical direction)
d at wheelhouse deck (in longitudinalrection) .
Generalised
.,,,(ton]
164.8256,
5962.
3777.3696,
5306,3035.
1539.511.797,
1486,4110.
3550.2758.
2584.1571.
326.1478.
Fig. 15 - Longitudinal a,=’elevation atwheelhouse deck
By correlation with measurements, theJ principal resonances can be immediatelydistinguished and are listed in Table 2. .
tl-14transom
I.&--- —

Ei@iiiHcarried out at IRCN (Earadis (15), Orsero (16))
MEASUREMENTSCALCULATIONSand at BSRA (Catley and Norris (17)), amongother institutions.
(fc-fm)/fm (%1
4.4 %
6,6 %
9.5 %
TABLE 2 - Frequency of the principal peaks,obtained by experimsnt$ and cal-CU1.t,or.s.
With the ex=eption of these 3 modes, itis quite difficult to identify the cal-culated modes with measurements; this dif-ficulty can be explained by the fact thatthe measured response is a combination ofmodes and therefore is no longer a naturalmode of vibration. So, we will restrict thecorrelation to the only 3 principal modesof the afterbody.
The difference between measured accel-eration and calculated amplitude of responseappears to be significant due to the Ia’kof knowledge concerning dampmg.
However, we consider that it is now,and will be for a long time, quite impos-sible to predict the exact amplitude ofthe response but it is first of major im-portance to be able to detect the principalmodes of vibration which may be eventuallythe most dangerous for the vibratory levelof the ship.
CONCLUSIONS
The fluid finite element discretizationused enables us to deal, more accuratelythan the conventional approach, with thedynamic fluid-structure interaction whichplays a significant role in ship vibrations.
It is now possible to determine witha suitable accuracy the set of natural modesof a ship and particularly of the afterbodyin a frequency range (5 - 15 Hz) which wasnot accessible by calculation using conven-tional added mass.
Introduction of arbitrary but realisticdamping and unitary excitation in the dyna-mic equation of motion, permits to comparethe relative influence of the natural modeson the frequency response and thus to detectthe ,potentially dangerous modes of vibra-tions of the afterbody.
The first step (free vibrations) of aship dynamic analysis appears to be nume-rically apprehendable in a satisfactorymanner now. The next step (analysis of thevibratory level in service) still needsnumerous correlation studies between cal-culations and measurements by structuralidentification in order to better characte-rize parameters such as damping : a betterknowledge of damping should be the firststep in this direction. In this respect,extensive measurements campaigns have been
M-15
.

13.
REFERENCES
1. E.M.Q. Roeren, ??Finite E~enent
Analysis of Ship Structures”in Finite Element Methods inStress Analysis, edited by
Ho1and and K Bell,~ Trondheim, Tapi~ Forlag, 1969.
2. G.C. Volcy, M. Baudin andP. Morel , “Integrated Treatmentof Static and VibratoryBehaviour of Twin-Screw 553,000dwt Tankers,’’Trans. RINA 1978.
3. H. Johannesen, K.T. Skaar andH. smoge~i, l!vibr~ti~~~ of
I,ftPart of High Output Ships,!!PRADS Symposium, The Soc. ofNav. Arch. of Japan, Tokyo,Oct. 1977.
4. M. Risse, lfSchwingungsuntersuchungnacb der Methode der FinitenElementen, ” Hansa No. 22, 1974.
5.
6.
7.
8.
9.
10.
11.
12.
D. Kavlie and H. Aasjord, “Pre-diction of Vibration in theAfterbody of Ships,t!Norwe ianMaritime Research No.*
F.M. Lewis, ‘“The Inertia ofWater Surrounding a VibratingShip,’f _Trans. SNAME, 1929.
J. Lockwood Taylor, “Some Hydro -dynamical Inertia Coefficient s,”Phil. Ma.g., S.7, No. 9, 1930.
J.J. Jensen and-N. F. Madsen,,,AReview of Ship Hull Vioration,”
The Shock and Vibration Digest,April, May, June, JuIY, 1977.
O.C. Zienkiewicz and R.E. Newton,,,~oup~ed vibrations of a strucwreSubmerged in a CompressibleFluid,!! Symposium on FiniteElement Techniques at tbe Institutfur Statik und D~namik der Luft -und Raumfahrtkon; truktionen,University of Stuttgart, June10-12, 1969.
J.-L. Armand and P. Orsero,MA N~neXical Determination of
the Entrained Water in ShipVibrations,<, to appear inInt. Journal for Num. MethodsIn Englneermg.
C.V. Betts, R.E.D. Bishop andW.G. Price, **ASurvey ofInternal Hull Damping ,11Trans . RINA, 1976.
S. Hylarid$s, ‘rDamping inPropeller-Generated ShipVibrations,’g NSMB Report 468,Wageningen, 1974.
!.
5.
16.
17,
J.P. Breslin and K.S. Eng,1*AMethod f-ol’computing Propeller -Induced Vibratory Forces onShips,,, DTMB Report 2002, 1965.
W.s. Vorus, ,1A ~eth~d f~~
Analysing the Propeller-InducedVibratory Forces Acting on theSurface of a Ship Stern,”Trans . SNAME, 1974.
A, Pdradis, “Transport de gazliquifi6 de 120 000 m3 : mesuresde press ion et de vibrations ,“ IRCNRe?oTt 64177, 1977.
P. Orsero,’’Identification des coefficientsd’amortissement par corr~lation entre.c;~~uls et mesures, ” IRCN Report 7712-R,
D. Catley and C. Norris, “TheoreticalPrediction of the Vertical DynamicRes?onse of Ship Structures using FiniteElements and Correlation with ShipMobility Measurements ,“ BSRA TechnicalMemorandum No. 492, 1976.
ACKNOWLEDGEMENTS
Research described in this paper ispart of a project on Reduction of Propeller-Induced Vibrations directed by the Institutde Recherches de la Construction Navaleand partially financed by the FrenchSecretariat G6n6ral de la Marine Marchande.Cooperation from the Division ConstructionsNavales of Alsthom-Atlantique (the formerChantiers de l’Atlantique) for the experimen-tal part during the sea trials is gratefullyacknowledged.
i.
I
M-16
!!&---