I-1 I. Concepts and Tools n Mathematics for Dynamic Systems l Differential Equation l Transfer...
48
I-1 I. Concepts and Tools Mathematics for Dynamic Systems Differential Equation Transfer Function State Space Time Response Transient Steady State Frequency Response Bode and Nyquist Plots Stability and Stability Margins Extensions to Digital Control
-
date post
21-Dec-2015 -
Category
Documents
-
view
216 -
download
3
Transcript of I-1 I. Concepts and Tools n Mathematics for Dynamic Systems l Differential Equation l Transfer...
I-1
I. Concepts and Tools Mathematics for Dynamic Systems
Differential Equation Transfer Function State Space
Time Response Transient Steady State
Frequency Response Bode and Nyquist Plots Stability and Stability Margins
Extensions to Digital Control

I-2
A Differential Equation of Motion
Newton’s Law:
A Linear Approximation:
( ) ( , ( ), ( ), ( )) ( )y t f t y t y t w t bu t
( ) ( ) ( ) ( )TKy t y t w t u tJ J

I-3
Laplace Transform and Transfer Function
2
( ) ( ) ( )
( ) ( ) ( ) ( )
( )( )
( ) ( )
T
T
Tp
Ky t y t u t
J J
Ks Y s sY s U s
J J
Y s KG s
U s s Js
0( ) ( ) stY s y t e dt

I-4
State Space Description
1 2
1 1
2 2
1
2
( ) ( ) ( )
,
0 1 0
0
[1 0]
T
T
Ky t y t u t
J J
x y x y
x xuK
x xJ J
xy
x
1
2
0 1 0,
0
[1 0], D=0
T
xLet x
x
x Ax Bu
y Cx Du
with
A B K
J JC

I-5
From State Space to Transfer Function
1( ) ( )
=( )
p
T
G s C sI A B D
K
s Js

I-6
Linear System Concepts
States form a linear vector space Controllable Subspace and Controllability Observable Subspace and Observability The Linear Time Invariance (LTI) Assumptions Stability
Lyapunov Stability (for linear or nonlinear systems) LTI System Stability: poles/eigenvalues in RHP

I-7
A Motion ControlProblem
LOAD
DRIVE
PULLEYASSEMBLY
J L
J D
N L
N D
N PD
N PL
WL0
r
r WL
M WL
r WDO
WDr
M WD
TD
J P
L
D
LT
B L L
DDB
B TRL
L
LLT J TR
L
LTRLJ
EQUIVALENTMODEL

I-8
L T TT J B
L D TT T gr
L T
D T T
grTF
T s J s B
D CS S A TT v K K K
( ) L S A T T
pCS T T
K K K grG s
v s J s B
From Differential Eq. To Transfer Function

I-9
( ) S A T T
pT T
K K K grG s
s J s B
Transfer Function model of the motion plant
( )p
KG s
s Js
I-10
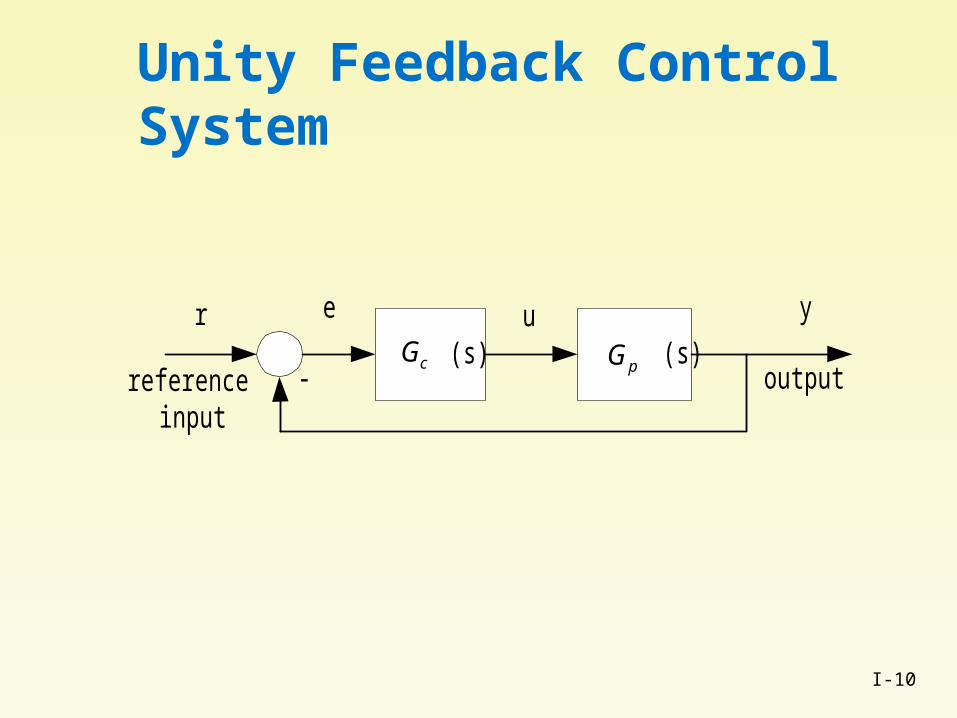
Unity Feedback Control System
(s)-
(s)r ye
referenceinput
outputpGcGu

I-11
Common Nonlinearities

I-12
Linearization

I-13
Time Response
I-14
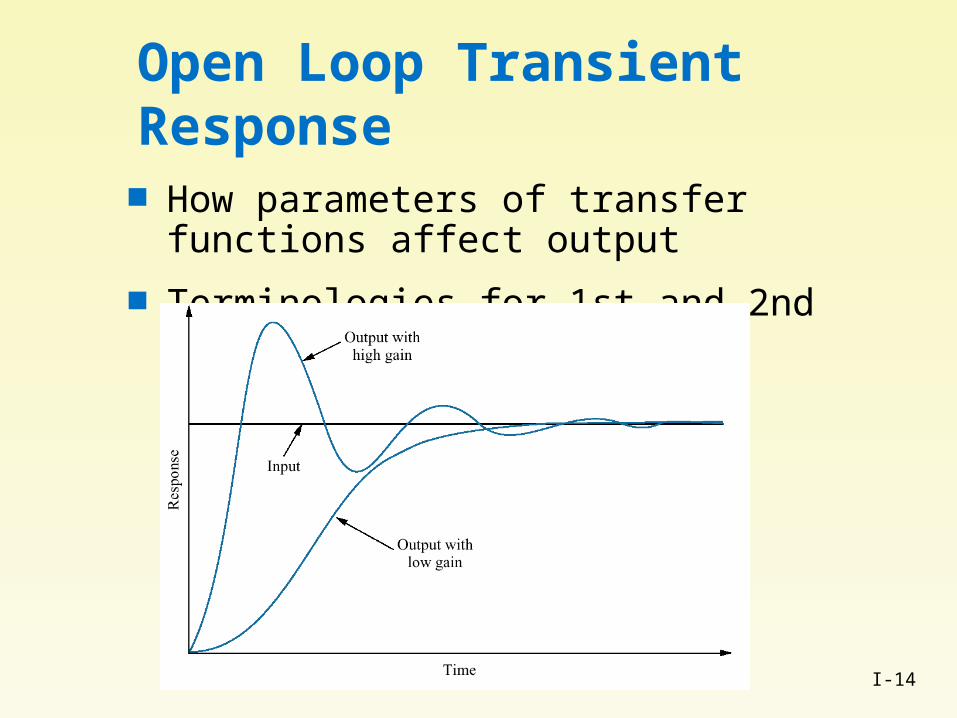
Open Loop Transient Response
How parameters of transfer functions affect output Terminologies for 1st and 2nd order systems

I-15
Basis of Analysis

I-16
First Order Transfer Function
( )
1
1
aG s
s a
s
I-17
Pure 2nd Order Transfer Functions
2
1( )
2 1
: damping ratio, : natural frequency
1: overdamped
1: underdamped
1: critically damped
0 : undamped
n n
n
G ss s
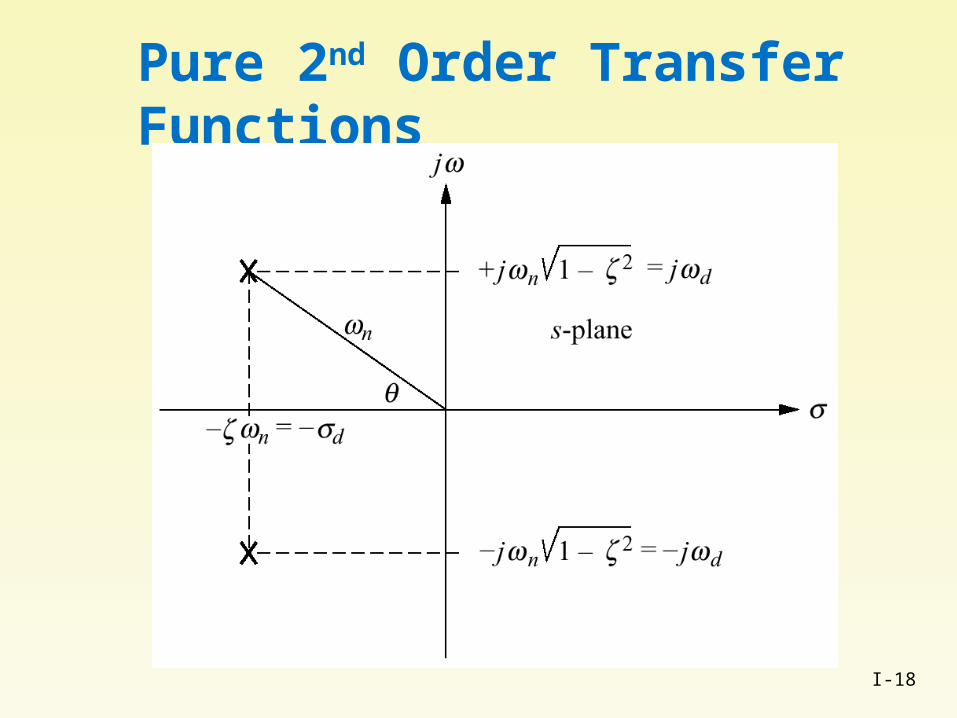
I-18
Pure 2nd Order Transfer Functions

I-19
Pure 2nd Order Transfer Functions

I-20
Terminologies
max% 100final
final
c cOS
c

I-21
Calculations
2( / 1 )% 100
4s
n
OS e
T

I-22
Pure 2nd Order Transfer Functions
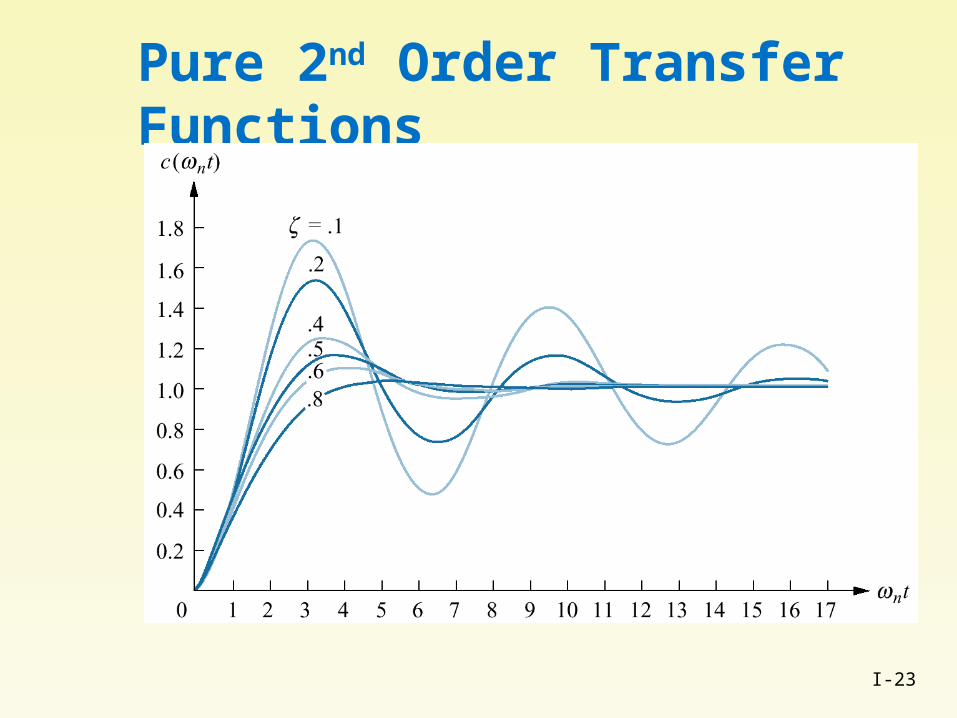
I-23
Pure 2nd Order Transfer Functions

I-24
Pure 2nd Order Transfer Functions

I-25
Steady State Response
Steady state response is determined by the dc gain: G(0)

I-26
Steady State Error
(s)-
(s)r ye
referenceinput
outputpGcGu
0( ) | ( ) |
( )( )
1 ( ) ( )
ss t s
c p
e e t sE s
R sE s
G s G s

I-27
Frequency Response: The MOST useful concept in control theory
Performance Measures Bandwidth Disturbance Rejection Noise Sensitivity
Stability Yes or No? Stability Margins (closeness to instability) Robustness (generalized stability margins)

I-28
Frequency Response
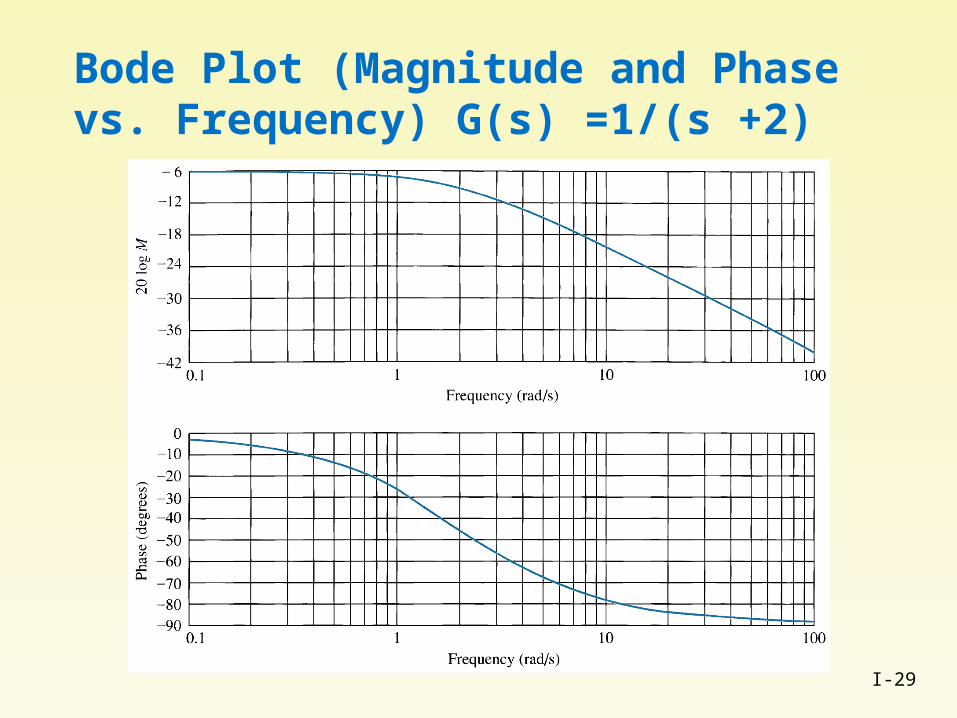
I-29
Bode Plot (Magnitude and Phase vs. Frequency) G(s) =1/(s +2)

I-30
Polar Plot: imaginary part vs. real part of G(j) G(s) =1/(s +2)

I-31
Bandwidth of Feedback Control
-3dB Frequency of CLTF
0 dB Crossing Frequency (c) of Gc(j)Gp(j)
Defines how fast y follows r
(s)-
(s)r ye
referenceinput
outputpGcGu
( ) ( )( )
( ) 1 ( ) ( )c p
c p
G j G jY j
R j G j G j

I-32
Disturbance Rejection
(s)-
(s)0 y
outputpGcG
d
( ) 1
( ) 1 ( ) ( )
measures disturbance rejection quality
c p
Y j
D j G j G j

I-33
Noise Sensitivity
(s)-
(s)0 y
pGcG
n
u
noise
( ) ( )
( ) 1 ( ) ( )
( ) at high frequency
c
c p
c
U j G j
N j G j G j
G j

I-34
Nyquist Plot
Using G (j) to determine the stability of
-
r y( )G s
( )H s
( ) ( ) ( )
( ) : Sensor and Filter
c pG s G s G s
H s

I-35
The Idea of Mapping

I-36
Nyquist Contour
j
j
s j RHP

I-37
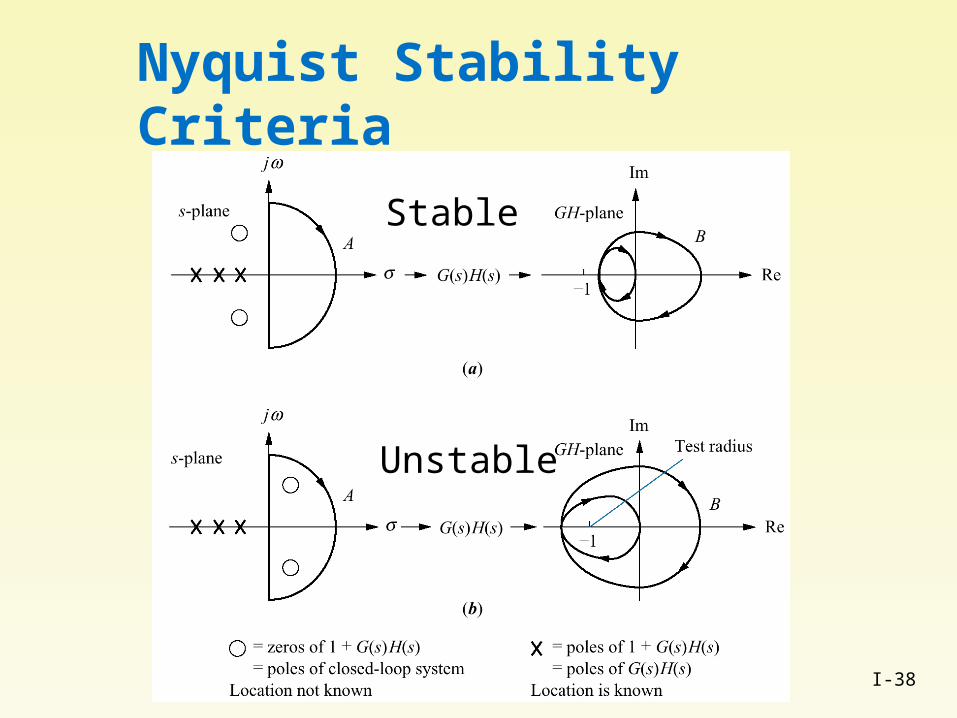
Nyquist Stability Criteria
Determine stability by inspection Assume G(s)H(s) is stable, let s complete the N-
countourThe closed-loop system is stable if G(s)H(s)
does not encircle the (-1,0) point Basis of Stability Robustness Further Reading: unstable G(s)H(s), # of unstable
poles
I-38
Nyquist Stability Criteria
Stable
Unstable
I-39
Stability Robustness
The (-1,0) point on the GH-plane becomes the focus Distance to instability:
G(s)H(s)-(-1)=1+G(s)H(s) Robust Stability Condition
Distance to instability > Dynamic Variations of G(s)H(s)
This is basis of modern robust control theory

I-40
Gain and Phase Margins(-1,0) is equivalent of 0dbpoint on Bode plot
G(j)H(j)
G(j)H(j)|

I-41
Stability Margins:
Bode PlotNyquist Plot

I-42
Digital Control

I-43
Discrete Signals

I-44
Digital Control Concepts
Sampling Rate Delay
ADC and DAC Resolution (quantization levels) Speed Aliasing
Digital Control AlgorithmDifference equation

I-45
Discrete System Description
Discrete system
h[n]: impulse response
Difference equation
h[n]u[n] y[n]
0 0
[ ] [ ]N M
k kk k
a y n k b u n k

I-46
Discrete Fourier Transform and z-Transform
X(e j ) x[n]e j
n
X(z) x[n]z n
n
I-47
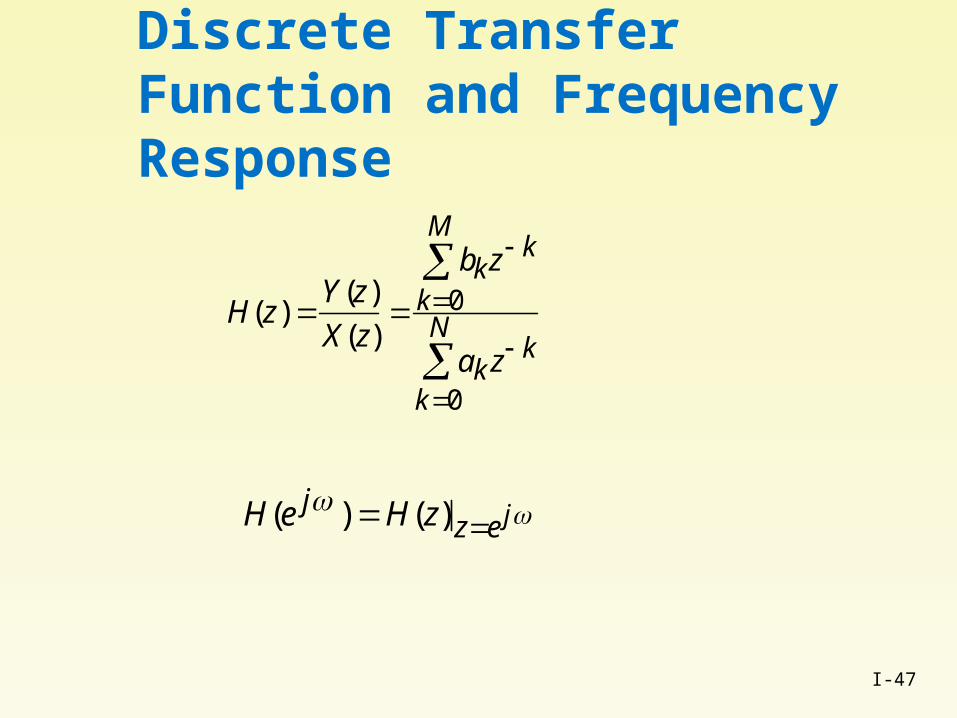
Discrete Transfer Function and Frequency Response
H(e j ) H(z) ze j
H(z) Y(z)
X(z)
bkz k
k0
M
ak z k
k0
N

I-48
Application of Basic Concepts to Previously Designed Controllers