Hybrid Systems Modeling, Analysis and Control · Radu Grosu Vienna University of Technology Hybrid...
50
Radu Grosu Vienna University of Technology Hybrid Systems Modeling, Analysis and Control Lecture 11 Constraint Satisfaction Using Interval Approximation
Transcript of Hybrid Systems Modeling, Analysis and Control · Radu Grosu Vienna University of Technology Hybrid...

Radu Grosu Vienna University of Technology
Hybrid Systems Modeling, Analysis and Control
Lecture 11 Constraint Satisfaction
Using Interval Approximation

Linear Classifiers with Hard Threshold x 2
: sur
face
-wav
e m
agni
tude
x1: body-wave magnitude
−Linear: A hyperplane. E.g. − 4.9 + 1.7x1 − x2 = 0
−Explosions: − 4.9 + 1.7x1 − x2 > 0
−Earthquake: − 4.9 + 1.7x1 − x2 < 0 Decidable!
! eartquake • nuclear explosion
Decision boundary: Surface that separates two classes

Polynomial Constraints
Theorem (Tarski 1949): The first-order theory of real-closed ordered fields is decidable.
Proof: FOT (R, ≤ ,+,×) admits quantifier elimination.
x2 + y2 − 1 = 0 ∧ y − x2 = 0
x
y

Polynomial Constraints
Theorem (Tarski 1949): The first-order theory of real-closed ordered fields is decidable.
Complexity: ExpExp in # alternations, Exp in # vars
x2 + y2 − 1 = 0 ∧ y − x2 = 0
x
y

What About Certificates?
Certificate: Satisfying valuation (solution) Quantifier-free case: Eg. x2 = 2
Question: How to represent the solution?
−Linear case: Rational numbers. Eg. 3x = 2 ⇒ x = 2 / 3
−Polynomial case: Real algebraic numbers (unintuitive)
−Non-polynomial case f(x) = 0: An approx algorithm
Given: desired precision k ∈NReturns r ∈Q: ∃x. |x − r| ≤ 10−k ∧ f(x) = 0

What About Certificates?
Certificate: Satisfying valuation (solution) Quantifier-free case: Eg. x2 = 2
Question: How to represent the solution?
−Linear case: Rational numbers. Eg. 3x = 2 ⇒ x = 2 / 3
−Polynomial case: Real algebraic numbers (unintuitive)
−Non-polynomial case f(x) = 0: An approx algorithm
Given: desired precision k ∈NReturns r ∈Q: |f(r)| ≤ 10−k

Non-Polynomial Constraints (NPC)
What about: FOT (R, ≤ ,+,×,sin) ?
−Undecidable: A Would allow encoding of polynomial diophantine equations (PDE)
f(x,y) > 0
f(x,y) < 0
x
y
−PDE: Known to be undecidable (Matiyasevich, 1970)

Fixing Precision of NPC
x
y
f(x,y) < 0
f(x,y) > 0
What about: FOT (R, ≤ ,+,×,sin) ?
Exponential: In the number of boxes!

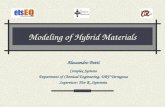
Top-Down Algorithm
x
y
f(x,y) < 0
f(x,y) > 0
What about: FOT (R, ≤ ,+,×,sin) ?
Top-Down Algorithm
x
y
f(x,y) < 0
f(x,y) > 0
What about: FOT (R, ≤ ,+,×,sin) ?

Top-Down Algorithm
x
y
f(x,y) < 0
f(x,y) > 0
What about: FOT (R, ≤ ,+,×,sin) ?

Top-Down Algorithm
x
y
f(x,y) < 0
f(x,y) > 0
What about: FOT (R, ≤ ,+,×,sin) ?

Top-Down Algorithm
x
y
f(x,y) < 0
f(x,y) > 0
What about: FOT (R, ≤ ,+,×,sin) ?

Top-Down Algorithm
x
y
f(x,y) < 0
f(x,y) > 0
What about: FOT (R, ≤ ,+,×,sin) ?
Infinite precision: May not terminate!

Robust Constraints
Real CPS (biology/engineered): Satisfy robust properties
−Satisfiability: Does not change under perturbations
c2
! eartquake • nuclear explosion
c1
x1: body-wave magnitude
x 2: s
urfa
ce-w
ave
mag
nitu
de

Robust Constraints
Constraint ϕ is robust iff
Real CPS (biology/engineered): Satisfy robust properties
−Satisfiability: Does not change under perturbations
x2 ≤ 0 ⇒ x2 ≤ −0.00001 −Not robust:
x2 ≤ 1 ⇒ x2 ≤ +0.99999 −Robust:
−Constraint distance: d(ϕ,ϕ') ! (ϕ ≡upto cst c
ϕ') ? c : ∞
−There is an ε such that
−For all ϕ ' with d(ϕ,ϕ') ≤ ε
ϕ and ϕ ' are equi-satifiable

Quasi Deciadable Problems
A problem is quasi decidable iff:
−There is an algorithm that
−Correctly checks satifiability and −Terminates on all robust instances
Theorem (Ratschan 2002):
−FOT (R, ≤ +, ×, exp, sin, ...) is quasi decidable
Assumptions:
−All variables are bounded (in some interval)
−Shortcut: f = 0 ≡ (f ≤ 0 ∧ f ≥ 0)
Implementation: http://rsolver.sourceforge.net

Not Quasi Deciadable Problems
Theorem (Clarke/Gao 2011):
−δ-Satisfiability is decidable
x
y
f(x,y) < 0
f(x,y) > 0
δ do not know

Algorithm: Quantifier-Free Conjunctive
Box (hyper-rectangle): Cartesian product of intervals
−Given ϕ: Conjunction of ≤ using +, ×, exp, sin
Uses algorithms for both sat and unsat: Why?
−Due to undecidability failure to prove sat
−Box B: Providing an interval for each variable
Quasi-Satisfiability Algorithm
−Decide: Sat or Unsat
−Does not imply unsat and vice versa −Later on can use information from each other

Search for Sat
Satisfiability: Statement over one valuation −Good search method: Suffices
−Local search examples: Newton-type methods
−Iteratively refine the grid
−Local search: Start from this points
x
y
f(x,y) < 0
f(x,y) > 0
−Approximation errors: Floating-point rounding OK

Search for Unsat: Branch and Bound
Non-Satisfiability: Statement over an uncountable set
−Symbolic representation: Necessary
S = test(ϕ,B) if (S = unsat) return S else
−Use: test(ϕ,B) ∈{unsat, unknown}
let B = B1 ∪B2 non-overlapping
Algorithm BB(ϕ,B): Either returns unsat or runs forever
if (BB(ϕ,B1) = BB(ϕ,B2) = unsat) return unsat
Can be interleaved: With satisfiability test

Test for Unsat
Works recursively: On the structure of ϕ −Special case: One single equality
−Input: f(x1,...,xn) = 0, B = intervals (I1,...,In)
{f(x1,...,xn) | x1 ∈I1,...,xn ∈In} ⊆ [f] (I1,...,In)
if (0 ∉[f](I1,...,In)) return unsat else unknown
Compute: [f] (I1,...,In), an inclusion of f, s.t:
Example:
x × y + 1 = 0
x ∈[2,3], y ∈[4,7] B = ([2,3],[4,7])
[2,3] [4,7]
x y
[8,21]
[×] [1,1]
[9,22]
[+]
1

Interval Arithmetic: Addition
Function [+] on intervals [a,a] and [b,b] is an inclusion:
[a,a] [+] [b,b] =
∅ if [a,a] = ∅ ∨ [b,b] = ∅[a + b,a + b] otherwise
⎧⎨⎪
⎩⎪
Example:
[8,21] [+] [1,1] = [9,22] [8,21] [1,1]
[9,22]
[+]
Proof: + does not have any local minimum Corners suffice

Interval Arithmetic: Multiplication
Function [×] on intervals [a,a] and [b,b] is an inclusion:
[a,a] [×] [b,b] =
∅ if [a,a] = ∅ ∨ [b,b] = ∅ [min{ab,ab,ab,ab}, max{ab,ab,ab,ab}] else
⎧⎨⎪
⎩⎪
Example:
[2,3] [×] [4,7] = [8,21] [2,3] [4,7]
[8,21]
[×]
Proof: × does not have any local minimum Corners suffice
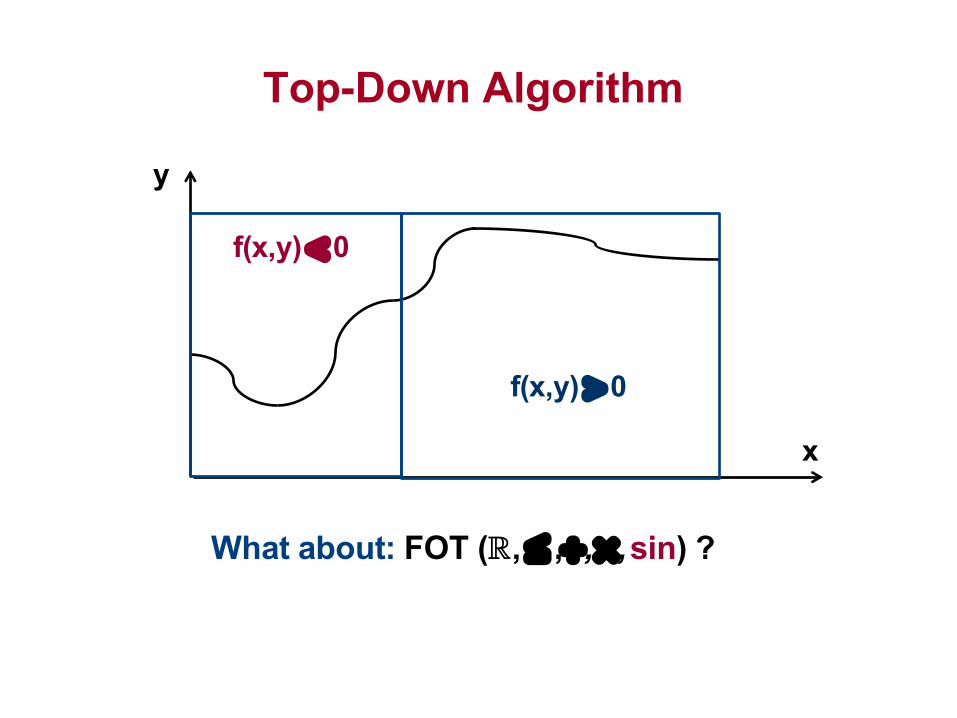
Multiplication Improved
Do we really need all corners?
b ≥ 0 0 ∈[b,b] b ≤ 0a ≥ 0 [ab, ab] [ab,ab] [ab,ab]
0 ∈[a,a] [ab,ab] [min{ab,ab}, max{ab,ab}] [ab,ab]a ≤ 0 [ab,ab] [ab,ab] [ab,ab]
Example:
[8,21] [+] [1,1] = [9,22] [2,3] [4,7]
[8,21]
[×]
−Observation: Fixed monotonicity in quadrants
−For: [a,a] = [0,0]∨ [b,b] = [0,0] return [0,0] else

Other Operations
What about exp, sin, cos?
−Observation: Exploit monotonicity!
Interval arithmetic: Given term t in vars x1 ∈I1,...,xn ∈In
[t](I1,...,In) =
Ii if t = xi
[c,c] if t = c
[s]([t1](I1,...,In),...,[tk ](I1,...,In)) if t = s(t1,..., tk )s ∈{+,×,exp,...}
⎧
⎨⎪⎪
⎩⎪⎪
Fundamental theorem of interval arithmetic:
−For a term e, its interval extension [e] is an inclusion.

Properties of Inclusions
Width of a box: w([a1,b1] × ... × [an,bn]) = max
i∈{1,...,n}| bi − ai |
−Thin: iff w(B) = 0 ⇒ w([f](B)) = 0 An inclusion [f] of a function f is:
where: f(B) ! {f(x) | x ∈B}, [A] ! [inf A, sup A]
−Convergent: iff ∀B1 ⊇ ... ⊇Bn.limn→∞ w(Bn) = 0 ⇒ w([f](Bn)) = 0
−Monotonic: iff B1 ⊆ B2 ⇒ [f](B1) ⊆ [f](B2)
−Optimal: iff [f](B) = [f(B)]
Theorem:
If f: Rn → R does not contain any variable more than once then [f] is optimal.

Dependency Problem
Interval arithmetic forgets equality between variables:
[x − x]([-1,1]) = [x]([-1,1]) [−] [x]([-1,1])
Diff ways of writing the same exp, diff results:
[a × (b + c)](B) ⊆ [a × b + a × c)](B)
There are systematic methods for dealing with the dependency problem: [Neumaier 1990, Moore 2009]
[x × y + x]([1,2],[-1,-1]) = ([x]([1,2]) [×] [y]([-1,-1])) [+] [x]([1,2])
= [-1,1] [−] [-1,1] = [-2,2] ⊃ [0,0]
= ([1,2] [×] [-1,-1]) [+] [1,2]
= [-2,-1] [+] [1,2] = [-1,1] ⊃ [0,0]

Wrapping Effect
Rotation matrix:
At =cos(t) sin(t)−sin(t) cos(t)
⎛
⎝⎜
⎞
⎠⎟
Appears in several contexts especially ODE solving
Exponential blow-up
−Smaller t makes things worse
−In the limit box eplodes by a
−A factor of e2π ≈ 535 per revolution
Partial solution: Coordinate transfomations

Efficiency of Branch-And-Bound
Curse of dimensionality:
−Halving boxes in n-dim: 2n boxes
−Branching does not scale in problem dim
−Can one deduce more without branching?

Example
x − 99 = 0 ∧ y − 99 = 0, x ∈[0,100], y ∈[0,100]
x
y
100
100

Example
x − 99 = 0 ∧ y − 99 = 0, x ∈[0,100], y ∈[0,100]
x
y
100
100

Example
x − 99 = 0 ∧ y − 99 = 0, x ∈[0,100], y ∈[0,100]
x
y
100
100

Example
x − 99 = 0 ∧ y − 99 = 0, x ∈[0,100], y ∈[0,100]
x
y
100
100

Example
x − 99 = 0 ∧ y − 99 = 0, x ∈[0,100], y ∈[0,100]
x
y
100
100

Example
x − 99 = 0 ∧ y − 99 = 0, x ∈[0,100], y ∈[0,100]
x
y
100
100

Example
x − 99 = 0 ∧ y − 99 = 0, x ∈[0,100], y ∈[0,100]
x
y
100
100

Example
x − 99 = 0 ∧ y − 99 = 0, x ∈[0,100], y ∈[0,100]
x
y
100
100

Example
x − 99 = 0 ∧ y − 99 = 0, x ∈[0,100], y ∈[0,100]
x
y
100
100
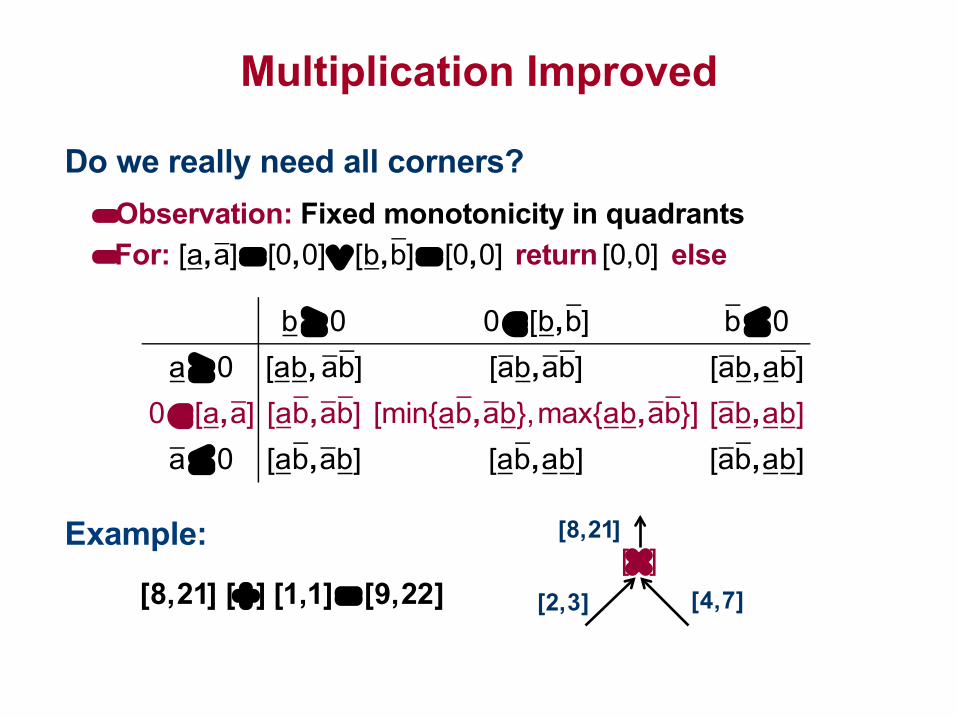
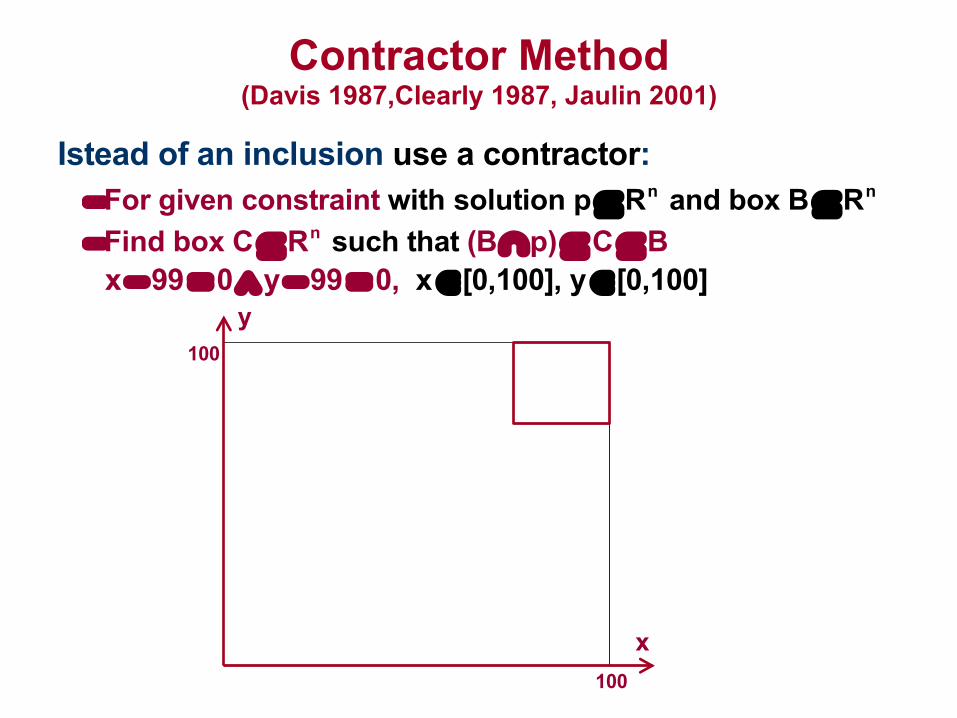
Contractor Method (Davis 1987,Clearly 1987, Jaulin 2001)
Istead of an inclusion use a contractor:
−For given constraint with solution p ⊆ Rn and box B ⊆ Rn
−Find box C ⊆ Rn such that (B∩p) ⊆ C ⊆ B
x − 99 = 0 ∧ y − 99 = 0, x ∈[0,100], y ∈[0,100]
x
y
100
100
Contractor Method (Davis 1987,Clearly 1987, Jaulin 2001)
x
y
100
100
Istead of an inclusion use a contractor:
−For given constraint with solution p ⊆ Rn and box B ⊆ Rn
−Find box C ⊆ Rn such that (B∩p) ⊆ C ⊆ B
x − 99 = 0 ∧ y − 99 = 0, x ∈[0,100], y ∈[0,100]

Contractor Method (Davis 1987,Clearly 1987, Jaulin 2001)
Istead of an inclusion use a contractor:
−For given constraint with solution p ⊆ Rn and box B ⊆ Rn
−Find box C ⊆ Rn such that (B∩p) ⊆ C ⊆ B
x − 99 = 0 ∧ y − 99 = 0, x ∈[0,100], y ∈[0,100]
A contractor ⌢p of a constraint p is called optimal iff:
−For every box B: ⌢p(B) = (B∩p)
−In practice: Optimal up to rounding

Computing Contractors: Sum
sum ! {(x,y,z) | x + y = z}
Contractor:
Need hull of projection to 3 axes within B = Ix × Iy × Iz
i π1(sum∩ Ix × Iy × Iz ) = Ix ∩ (Iz − Iy )
i π2(sum∩ Ix × Iy × Iz ) = Iy ∩ (Iz − Ix )
i π3(sum∩ Ix × Iy × Iz ) = Iz ∩ (Ix + Iy )
i s⌢um(Ix × Iy × Iz ) = Ix ∩ (Iz − Iy ) × Iy ∩ (Iz − Ix ) × Iz ∩ (Ix + Iy )
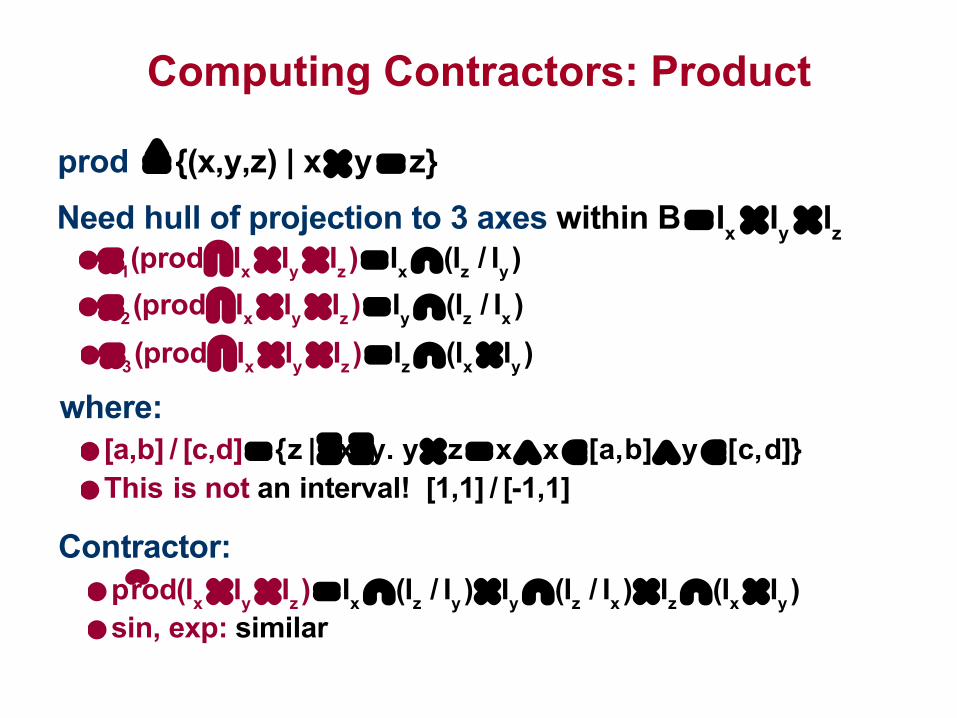
Computing Contractors: Product
prod ! {(x,y,z) | x × y = z}
where:
Need hull of projection to 3 axes within B = Ix × Iy × Iz
i π1(prod∩ Ix × Iy × Iz ) = Ix ∩ (Iz / Iy )
i π2(prod∩ Ix × Iy × Iz ) = Iy ∩ (Iz / Ix )
i π3(prod∩ Ix × Iy × Iz ) = Iz ∩ (Ix × Iy )
i [a,b] / [c,d] = {z | ∃x∃y. y × z = x ∧ x ∈[a,b]∧ y ∈[c,d]}
Contractor:
i p⌢rod(Ix × Iy × Iz ) = Ix ∩ (Iz / Iy ) × Iy ∩ (Iz / Ix ) × Iz ∩ (Ix × Iy )
i This is not an interval! [1,1] / [-1,1]
i sin, exp: similar

Contractors: Conjunction c1∧...∧cn
C = {c1,...,cn}
while (∃c ∈C. ⌢c(B) ≠ B) B =
⌢c(B)

Contractors: Conjunction c1∧...∧cn
C = {c1,...,cn}
while (∃c ∈C. ⌢c(B) ≠ B) B =
⌢c(B)

Contractors: Conjunction c1∧...∧cn
C = {c1,...,cn}
while (∃c ∈C. ⌢c(B) ≠ B) B =
⌢c(B)

Contractors: Conjunction c1∧...∧cn
C = {c1,...,cn}
while (∃c ∈C. ⌢c(B) ≠ B) B =
⌢c(B)
Termination? Optimal?

Contractors: Conjunction c1∧...∧cn
C = {c1,...,cn}
while (∃c ∈C. ⌢c(B) ≠ B) B =
⌢c(B)
Termination? Optimal? x − y = 0 ∧ x + y = 0

Contractors: Constraints with General Terms
Optimal?
Example: x × y + sin(z) = 0
i x × y = v1 ∧ sin(z) = v2 ∧ v1 + v2 = v3 ∧ v3 = 0
i Primitive constraints: x + y = z, x × y = z, sin(x) = x,...
i No,but at least as good as interval arithmetic
i RSolver implementation, dReal implementation



![[] Hybrid Self-Organizing Modeling org](https://static.fdocuments.us/doc/165x107/543c51adafaf9fe8338b4707/-hybrid-self-organizing-modeling-org.jpg)