
HOMOTOPIES AND DEFORMATION RETRACTS THESIS
69
A181 HOMOTOPIES AND DEFORMATION RETRACTS THESIS Presented to the Graduate Council of the University of North Texas in Partial Fulfillment of the Requirements For the Degree of MASTER OF ARTS By Villiam D. Stark, B.G.S. Denton, Texas December, 1990
Transcript of HOMOTOPIES AND DEFORMATION RETRACTS THESIS
A181
HOMOTOPIES AND DEFORMATION
RETRACTS
THESIS
Presented to the Graduate Council of the
University of North Texas in Partial
Fulfillment of the Requirements
For the Degree of
MASTER OF ARTS
By
Villiam D. Stark, B.G.S.
Denton, Texas
December, 1990
Stark, William D., Homotopies and Deformation Retracts.
Master of Arts (Mathematics), December, 1990, 65 pp., 9
illustrations, references, 5 titles.
This paper introduces the background concepts necessary
to develop a detailed proof of a theorem by Ralph H. Fox
which states that two topological spaces are the same
homotopy type if and only if both are deformation retracts
of a third space, the mapping cylinder. The concepts of
homotopy and deformation are introduced in chapter 2, and
retraction and deformation retract are defined in chapter 3.
Chapter 4 develops the idea of the mapping cylinder, and the
proof is completed. Three special cases are examined in
chapter 5.
TABLE OF CONTENTS
Page
LIST OF ILLUSTRATIONS
CHAPTER
1. Introduction . . . . . . . . . . . . . . .
2. Homotopy and Deformation . . . . . . . . .
3. Retraction and Deformation Retract . .
4. The Mapping Cylinder .. . . . .
5. Applications . . . .
REFERENCES . . . .a .. ..a 0. ... 0 ...
iii
. .0 . a. 0. . . . . . . .a . .a iv
1
. 10
. 25
45
65
LIST OF ILLUSTRATIONS
Page
FIGURE
Illustration of a Homotopy ...
Homotopy for Theorem 2.6 . .
The Comb Space ...... .
Transitivity of Homotopy . .
The Mapping Cylinder
Function Diagram for Theorem 4.5
The Homotopy "r"
Special Inverse
Homotopy for Theorem 5.11 .
4
8
18
. . .22
. 26
. . .31
. . .37
. . .50
. . .61
iv
1.
2.
3.
4.
5.
6.
7.
8.
9.
CHAPTER I
INTRODUCTION
The purpose of this paper is to introduce some concepts
which can be used to describe relationships between
topological spaces, specifically homotopy, deformation, and
retraction. These concepts can also be used to characterize
an equivalence relation on the class of topological spaces.
Another topological space called a mapping cylinder is the
tool used. The idea of a mapping cylinder is described by
R. H. Fox in his paper "On Homotopy Type and Deformation
Retracts"', and this article provided the motivation for,
and much of the material in this paper. The theorems and
definitions quoted are from this paper unless otherwise
noted.
The fundamental idea of this paper., that of homotopy,
is introduced in chapter 2. The concept of homeomorphism
can be thought of as a relationship between spaces. Then
the question arises as to whether there is a more general
relationship between two spaces which are not homeomorphic.
One more general categorization of topological spaces,
homotopy type, is described in chapter 3. The purpose of
1R. H. Fox, "On Homotopy Type and Deformation Retracts,"Annals of Mathematics 44 (January 1943): 40-50.
1
2
Fox's paper is to give a proof of his theorem which states
that two spaces belong to the same homotopy type if and only
if they both can be homeomorphically imbedded in a third
space of which both are deformation retracts. The concepts
of deformation and retract are defined in chapter 3. A
generalized method of constructing this third space uses the
concept of a mapping cylinder which is introduced in chapter
4. In chapter 5 some special cases are described. The
concept of a space being inessential relative to a subset is
defined, and several theorems are proved. Special homotopy
and special homotopy inverse are defined, and a relationship
between them is described. Then E-homotopies are defined
and several results are shown.
The major result of this paper is to construct, or
reconstruct in detail, the proofs of the theorems of Fox's
paper using a more precise notation. Additional theorems
have been added to provide the background necessary to
explicate his results.
CHAPTER II
HOMOTOPY AND DEFORMATION
Throughout this paper the terms "map" or "mapping"
refer to a continuous function from one topological space to
another. If there is a question as to whether a map is
continuous, it will be referred to as a function until its
continuity is established. The notation used generally
follows that used in Willard's General Topology.2
Definition 2.1: Mappings f and g from a space A into a
space D are homotopic, written f ~ g, if and only if there
is a mapping from A x [0,1] into D such that for all a E A
6(a,0) = f(a), and 6(a,1) = g(a). The map 6 is a homotopy
between f and g.
From this definition one can see that a homotopy can be
thought of as a collection of maps 6t: A - D for every
t f [0,1]. The notation "t" will refer to a map from A
into D for a particular t e [0,1], and the notation " (a,t)"
will refer to a map from A x [0,1] into D, but it should be
clear that for every t E [0,1] 6t(a) = 6(a,t). It is often
helpful to think of the parameter t as time. Thus for the
homotopy , if 60 = f and 6, = g then the collection of
2Stephen Willard, General Topology (Reading, Mass.:Addison-Wesley Publishing Co., 1970).
3
4
t's for t c [0,1] can be thought of as a kind of
"continuous transformation" of f into g over time.
It is always important to maintain the distinction
between a function and the set which is the image of the
function; however, when a concept is illustrated
geometrically the symbol for a map and the symbol for its
image are sometimes interchanged for the sake of simplicity.
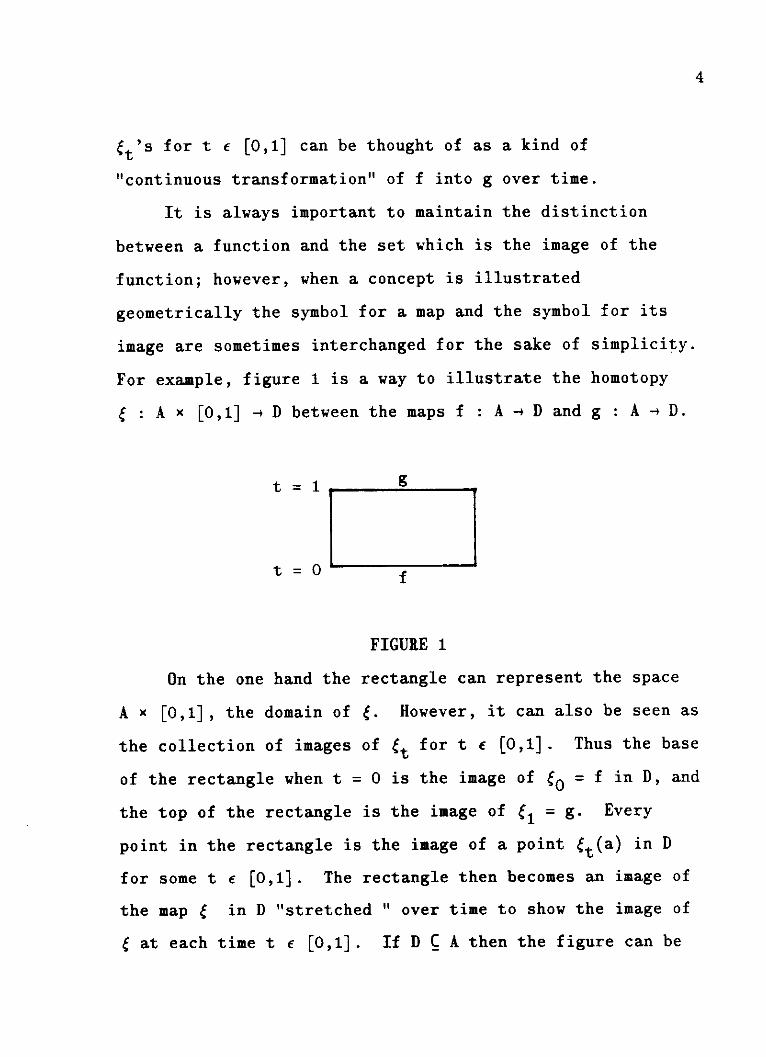
For example, figure 1 is a way to illustrate the homotopy
: A x [0,1] -+ D between the maps f : A -+ D and g : A -4 D.
t=1 g
t0 f
FIGURE 1
On the one hand the rectangle can represent the space
A x [0,1], the domain of 6. However, it can also be seen as
the collection of images of t for t E [0,1]. Thus the base
of the rectangle when t = 0 is the image of 60 = f in D, and
the top of the rectangle is the image of 6, = g. Every
point in the rectangle is the image of a point 6t(a) in D
for some t E [0,1]. The rectangle then becomes an image of
the map ( in D "stretched " over time to show the image of
6 at each time t E [0,1]. If D C A then the figure can be
5
seen both ways with the image of 6 superimposed on its
domain. For greatest clarity both the domain and the range
of-a homotopy can be shown. However, since the domain of a
homotopy is usually clear from the written description, only
its image is usually represented.
Just as 6 can be seen as a collection of maps 6t for t
e [0,1], the homotopy can also be seen as a collection of
maps 6a :[0,1] - D, and this notation will also be useful.
The proof of a simple theorem about homotopies will
illustrate some of the ways homotopies can be used to
generate a new homotopy.
Theorem 2.2: Homotopy is an equivalence relation on
the set of maps from one space to another.
Proof: Let F be the set of maps from a space A into a
space D.
Suppose f c F. f ~ f by the homotopy 6 :A x [0,1] - D
defined by (a,t) = f(a) for every t E [0,1]. Thus homotopy
is reflexive.
Suppose f ~ g by the homotopy 6 : A x {0,1] - D. Then
6(a,0) = f(a) , (a,1) = g(a), and 6(a,t) E D Va E A. Then
by substituting (1 - t) for t, 6(a,1 - 0) = 6(a,1) = g(a),
and 6(a,1 - 1) = 6(a,0) = f(a). Thus g ~ f. Therefore
homotopy is symmetric. The notation "(r)" will be used to
indicate that the homotopy, 6 is reversed by substituting
(1 - t) for t.
6
Suppose f ~ g by the homotopy , and g ~ h by the
homotopy A. Define a map : A x [0,1] - D by:
((at) = E(a,2t) for t E [0,1/2]
A(a,2t - 1) for t c [1/2,1]
Thus C(a,O) = (a,O) = f(a) , C(a,1) = A(a,1) = h(a). Since
C is defined in terms of continuous functions, to show that
C is continuous it is sufficient to show that the definition
is consistent where the different parts overlap. Thus
C(a,1/2) = 6(a,1) = g(a) = A(a,0). So C is continuous and
therefore a homotopy between f and h. Therefore homotopy is
transitive.
Therefore homotopy is an equivalence relation on the
set of maps from one space to another. 0
Definition 2.3: A path in a space A between points a0and a1 is a map p : [0,1] - A such that p(0) = a0 and
p(1) = a1 .
Lemma 2.4: Suppose ( : A x [0,1] - D is a homotopy
between 60 and 61. Then for every a E A there is a path in
D between 6(a,0) and 6(a,1).
Proof: Let a be a member of A. Define a function
Pa :[0,1] -4 D by pa(t) = 6(a,t). Thus p a(0) = (a,0) and
Pa(1) = 6(a,1). Notice that pa =a. Therefore pa is
continuous. 0
7
Definition 2.5: If A C D, then a deformation 6 is a
homotopy between the identity on A, idA, and a map
g : A -4 D. Thus 6 A x [0,1] -4 D where 6(a,O) = a and
6(a,1) = g(a) for all a E A. The set g(A) is called a
deform of A, and A is said to be deformable in D into g(A).
If A = D, one simply says that A can be deformed into g(A).
If g(A) is a singleton set then 6 is a contraction of A.
Theorem 2.6: If A can be deformed into B then a
mapping f of A into A is homotopic to the identity on A if
and only if f restricted to B, written fIB, is homotopic to
the identity on B.
Proof: Suppose A can be deformed into B. Let
f : A - A be any mapping of A into A. Since A can be
deformed into B, then B C A and there is a homotopy 6
between the identity on A and some mapping g : A -4 A where
g(A) C B. Thus 6 : A x [0,1] - A such that 6(a,0) = a and
6(a,1) = g(a) Va E A.
Suppose idB B by the homotopy n. Then
1 :B x [0,1] -1 B such that 17(b,0) = idB(b) = b and
(b,1) = fIB(b) Vb E B. It needs to be shown that
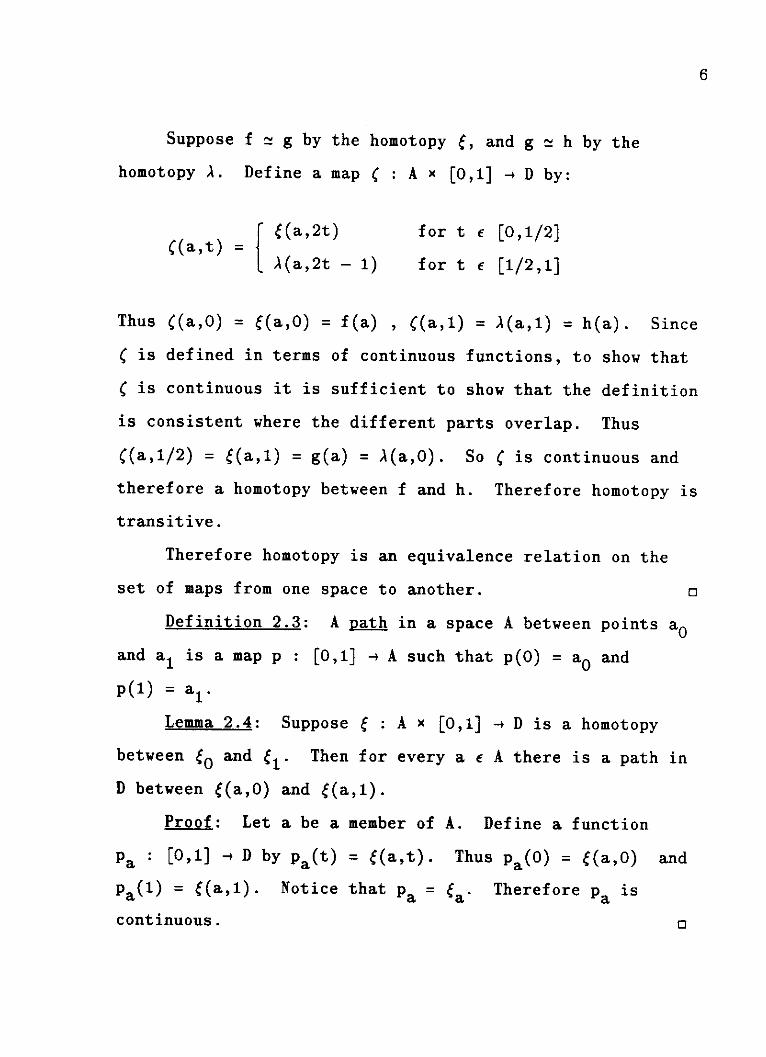
idA ~ f. Define ( :A x [0,1] -+ A by:
((a,t) = IThus the map ((a,0)
((a,1) = f(6
1
2/3
1/3
t =0
6(a,3t) for 0 < t < 1/3
r(6(a,l),3t - 1) for 1/3 < t < 2/3
f(6(a,3 - 3t)) for 2/3 t < 1
= 6(a,O) = idA(a) = a, and the map
(a,0)) = f(a).
f (A)
FIGURE 2
8
f(6(r))
f (B)
f (B)
77
6(A x {1})
g(A)
S
id

9
In order to show that C is continuous it is sufficient
to show that C is consistent at t = 1/3 and t = 2/3, since C
is defined in terms of continuous functions. The map
((a,1/3) = 6(a,3(1/3)) = 6(a,1) = g(a) E B, and g(A) = B.
Also, C(a,1/3) = r(6(a,1),3(1/3) - 1) = n(6(a,1),O) =
n(g(a),O) = idB(g(a)) = g(a). The map C(a,2/3) =
n(6(a,1),3(2/3) - 1) = n(g(a),1) = f|B(g(a)), and
n(g(A),1) = (B),1) = fIB(B) = f(B). And C(a,2/3) =
f (6(a,3-3(2/3))) = f (6(a,1)) = f (g(a)) = fjB(g(a)). Thus C
is consistent at t = 1/3 and t = 2/3 and is therefore
continuous. Therefore C is a homotopy between idA and f(A).
Conversely, suppose f ~. idA by the the homotopy (.
Thus 6 : A x [0,1] -+ A and 6(a,0) = a and 6(a,1) = f(a).
Since B C A, 61B : B x [0,1] -+ A such that (b,0) = b, and
6(b,1) = f(b) = f|B(b) Vb E B. Therefore 61B is a homotopy
between idB and fjIB'
CHAPTER III
RETRACTION AND DEFORMATION RETRACT
The concept of a retraction is related to both
set-theoretic topology and algebraic topology. In
set-theoretic topology there are several generalizations of
Tiezte's Extension Theorem which use this notion.3 In the
following material two of these extension theorems will be
used without proof, and in this paper the use of the concept
will be confined to the set-theoretic applications.
Definition 3.1: A subset B of a space A is a retract
of A if and only if there is a mapping r : A - B such that
rIB = idB. The map r is called a retraction of A into B,
and one says A is retractable into B.
Definition 3.2: A retract D of a space A is a
deformation retract if and only if a retraction r : A - D is
homotopic to idA by some homotopy,6. The retraction r is
then called a deformation retraction and the homotopy S is
called a retracting deformation.
Theorem 3.3: The subset B of a space A is a
deformation retract of A if and only if B is a retract of A,
and A is deformable into B.
3Karol Borsuk, Theory of retracts (Warszawa, Poland:PWN - Polish Scientific Publishers, 1966), 5.
10
11
Proof: Suppose B is a deformation retract of A. Then
by the definition there is a retracting deformation
6 : A x [0,1] - A such that 6(a,0) = a and 6(a,1) = r(a)
for some retraction r : A - A such that r(A) = B. Thus B is
a retract of A, and A is deformable into B.
Conversely, suppose B is a retract of A and A is
deformable into B. Since B is a retract of A, then there is
a map r : A -+ B such that rIB = idB. Then clearly
rIB ~ idB. Since A is deformable into B then by theorem
2.6, r ~ idA. Thus B is a deformation retract of A. o
As an example of a retract which is not a deform,
consider the unit circle,S1, in the plane along with the
point (0,0). Let A = S1 U {(0,0)} with the subspace
topology. The constant map k : A - A such that k(a) = (0,0)
is evidently a retraction of A into {(0,0)},but A is not
deformable into {(0,0)}. Just suppose there was such a
deformation 6 : A x [0,1] -4 A. Then 60 = idA and 61 (A) =
{(0,0)}. By lemma 2.4, for a point x of S there is a path
from 60 (x) = x to 61(x) = (0,0) in A. This is clearly a
contradiction. Therefore A is not deformable into {(0,0)}.
Definition 3.4:4 A closed subset X0 of a Hausdorff
space X is a neighborhood retract in X if and only if Xo is
a retract of some open subset of X containing Xo.
4ibid., 14.
12
Notice that every retract of X is a neighborhood
retract in X, since the space X is a neighborhood of every
subset in X. But not every neighborhood retract is a
retract. Borsuk gives the following example.5 Let Sn-1 be
na sphere in n-dimensional Euclidean space, Rn. The set,
Rn minus the origin, Rn - {O}, is a neighborhood of Sn-1
Define a map r : n - {0} _Sn-1 by r(x) = x/I|xII , where jjxjj
is the distance of x from the origin. Then r is a
retraction of Rn - {O} onto Sn-1. Then Borsuk cites a proof
of the fact that Sn-1 is not a retract of Rn given by
Hirsch. 6 Hirsch's proof relies on theorems from algebraic
topology and is beyond the scope of this paper.
Definition 3.5:7 An absolute neighborhood retract,
abbreviated ANR, is a separable, metrizable space which is a
neighborhood retract of every separable, metrizable space
which contains it as a closed subset.
Thus an ANR is a separable, metrizable space A such
that for every separable, metrizable space E which contains
A as a closed subset, there is an open neighborhood U of A
in E and a map r: U - A such that rA = idA.
5ibid., 12-14.6Morris V. Hirsch, "A Proof of the Nonretractability
of a Cell Onto Its Boundary," Proceedings of the AmericanMathematical Society 14 (1963): 364-365.
7Ralph H. Fox, "A Characterization of AbsoluteNeighborhood Retracts," Bulletin of the American MathematicalSociety 48 (1942): 271-275.
13
Theorem 3.6: If 6 is a deformation of an ANR, A, and B
is the set of fixed points of 61, then there is a homotopy C
between idA and 61 such that the points of B are fixed under
each of the maps 6t for 0 < t < 1.
Proof: Let A be an ANR, : A x [0,1] - A be a
deformation, and B be the fixed points of 6,. Thus 60 = idA
and B C 61 (A) such that Vb E B 6 1(b) = b. Define a function
7 : (A x {0} U B x [0,1] U A x {1}) x [0,1] - A by:
j((a,0),u) = a for 0 < u < 1 and a EA
)(a,t/u)for 0 < t < u <1 and a c B
t a for 0 u <t <1 and a EB
((a,1),u) = 6(a,1) for 0 < u < 1 and a e A
Here the "time" variable for 6 is t and u for 77.
To show that V is continuous it is sufficient to show
that the definition is consistent where the parts overlap.
The first line and the second line of the definition of n
overlap when t = 0 and a E B. Then i((a,0),u) = a for
0 < u < 1 and f(a,0/u) = 6(a,0) = a for 0 = t< u < 1, and
a E B. Thus when t = 0 the definition of i is consistent.
Lines two and three overlap for members of B when 0 < t = u
< 1. Then from line two j(a,t),u) = 6(a,t/u) = 6(a,1) = a,
since a E B and B is the set B of fixed points of 6,. This
14
agrees with line three. Line three and line four overlap
when t = 1 and a E B. By line four n((a,1),u) = 6(a,1)
which equals a if a e B. Thus lines three and four agree.
Therefore n is a homotopy between no and nj.
Notice that for u = 1, when t = 0, nl(a,O) = a = 6(a,O)
Va E A. And n1(a,t) = 6(a,t/1) = 6(a,t) Va E B. When t = 1
n1(a,1) = 6(a,1) for all a E A. Thus V, and 6 agree for
0 t< 1. But 6 is a map from A x [0,1] into A; so 6 is an
extension of nj from the set
{(A x {0}) U (B x [0,1]) U (A x {1})} to the set A x [0,1].
Claim: The set {(A x {0}) U (B x [0,1]) U (A x {1})}
is closed in A x [0,1]. For brevity call this set S.
Since A x {0} and A x {1} are each the product of A
with a closed set,{0} and {1} respectively, they are both
closed in A x [0,1].
Sub claim: The set of fixed points of 61 B is closed
in A.
Suppose x is a limit point of B and x 0 B. Since A is
an ANR, a separable,metrizable space, A is 2nd countable and
thus also 1st countable. Since x is a limit point of B,
there is a sequence of points of B, {bk}, which converge to
x. Since 6 is continuous, 61({bk}) = { l(bk)} is a
sequence in 61 (A) C A which converges to 6 1(x). But 6,(bk)
= bk for every k, since bk is in B. So the sequence {bk}
converges to 61(x). Therefore 61(x) = x. This implies x is
15
a fixed point of (j and x is in B. Therefore B contains all
of its limit points and is closed.
Thus B x [0,1] is closed in A x [0,1]. Therefore the
set S is the finite union of closed sets and is closed in
A x [0,1].
Borsuk's Theorem as generalized by Dowker states "Let C
be a closed subset of a space X and f and g two homotopic
mappings of C in an arbitrary absolute neighborhood retract.
Then if there is an extension F of f over X there is also an
extension G of g over X, with F and G homotopic."8
In our case C = S which is closed in A x [0,1], the
space X in our case. The maps f and g are n and no'
respectively which map S into A, an ANR. Then since there
is an extension of 77 to A x [0,1], namely 6, there is also
an extension of no to A x [0,1]. Call this extension (, and
by the theorem 6 ~ C. Thus C : A x [0,1] - A such that (IS
= no. Now when t = 0, C(a,0) = n 0(a,0) = a Va c A. So C0
= idA. When t = 1 ((a,1) = n 0(a,1) = 6(a,1). So (1 = 61.
Therefore C is a deformation of A into 61 (A). Furthermore,
((bt) = V 0(b,t) = b Vb e B for 0 ( t ( 1. So the points
of B are fixed under each of the maps, Ct for 0 < t < 1. 0
Suppose A and a subset B are ANR sets.
8Witold Hurewicz and Henry Wallman, Dimension Theory(Princeton: Princeton University Press, 1941) 86.
16
Theorem 3.7a: The set B is a deformation retract of A
if and only is there is a retracting deformation 6 of A onto
B such that the points of B are fixed under each tfor
0 < t< 1
Theorem 3.7b: The set B is a deformation retract of A
if and only if there is a deformation 6 of A onto B such
that t(B) C B for 0 < t < 1.
Proof of version a: Suppose there is a retracting
deformation ( of A onto B such that the points of B are
fixed under each 6t for 0 < t < 1. It follows from the
definition that B is a deformation retract of A.
Conversely, suppose B is a deformation retract of A by
the deformation 6 : A x [0,1] -+ A such that 60 = idA and
61(A) = B and 611B = idB. Then B is the set of fixed points
of 6 . By theorem 3.6 there is a homotopy ( such that (t(b)
= idB for 0 < t < 1 and C is a retracting deformation of A
onto B.
Proof of version b: Suppose B is a deformation retract
of A. Then by the paragraph above there is a retracting
deformation C from A onto B such that (t(B) = idB , and
therefore (B(B) C B for 0 < t < 1.
Conversely, suppose there is a deformation 6 of A onto
B such that 6t(B) C B for 0 < t 1. Then 60 = idA and
61(A) = B. So 601B = idB and 6t1B g B for every t. The map
61B is a homotopy between 601B and 61|B' Since B is an ANR
17
and contained in A, by definition it is closed in A. Since
A is an ANR it is metrizable and therefore normal. By the
Borsuk-Kuratowski Theorem which says, "If V is a closed
subset of a normal space,Z and X is an AR-set (ANR-set),
then every continuous map of V into X can be extended to Z
(to a neighborhood of V in Z)".9 Thus 6 01B can be extended
to A. Call this extension r. So r : A - B and rIB = 60=
idB. Therefore r is a retraction of A onto B. By theorem
3.3, B is a deformation retract of A. o
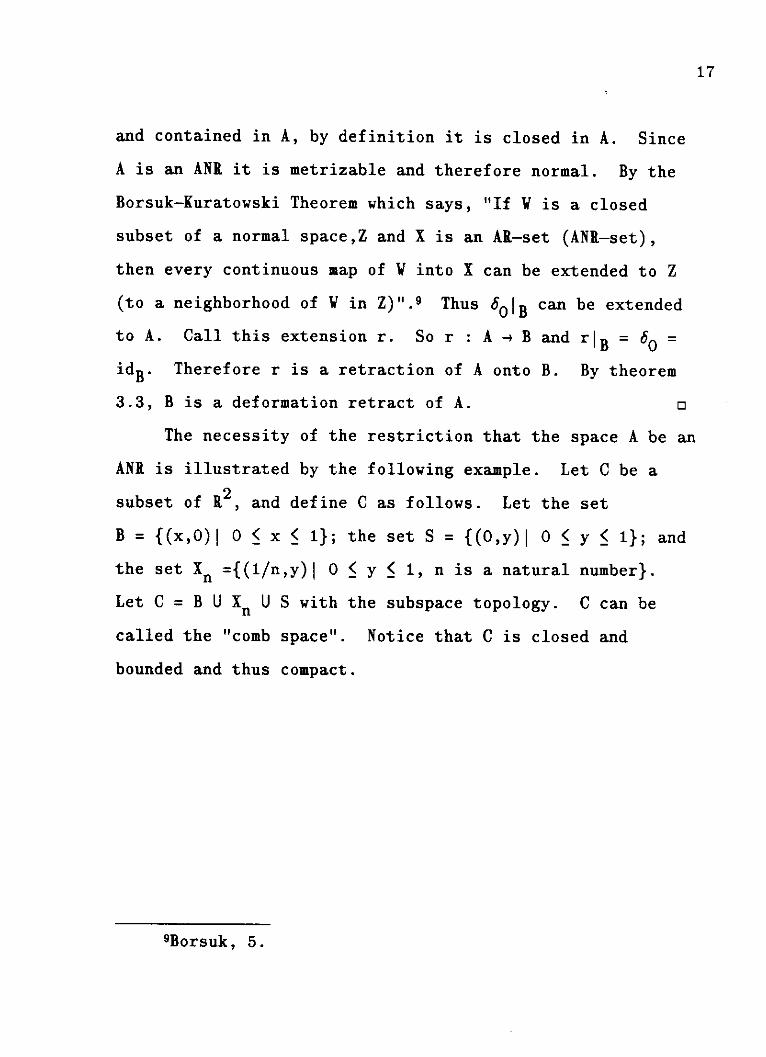
The necessity of the restriction that the space A be an
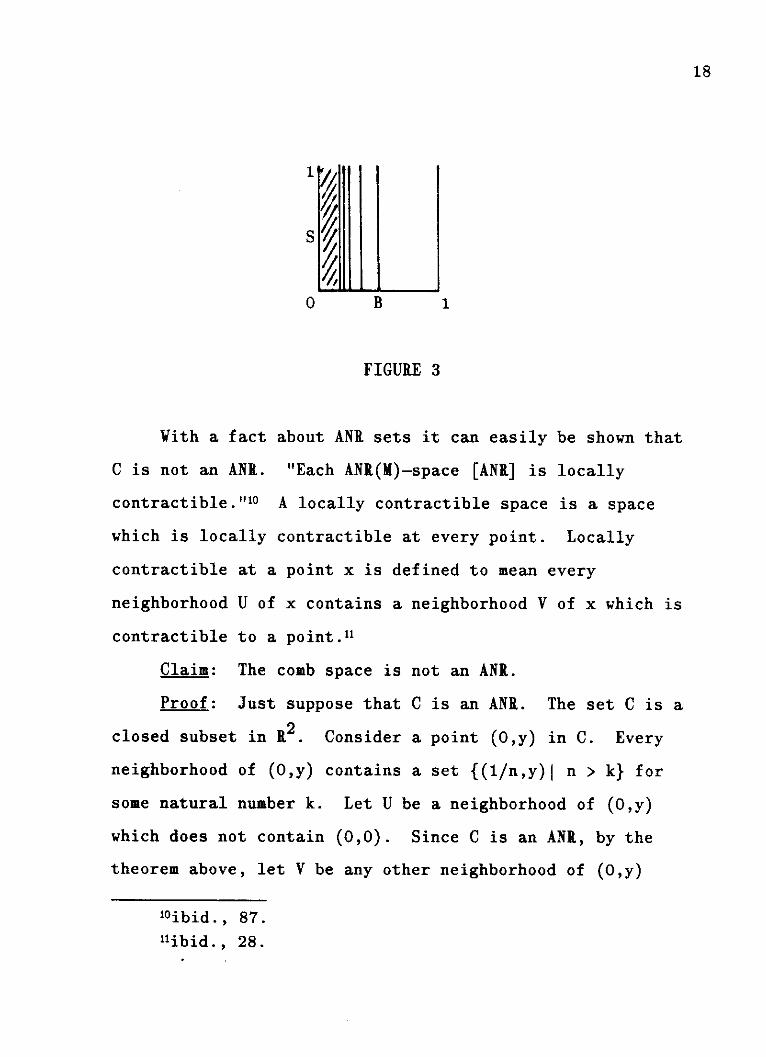
ANR is illustrated by the following example. Let C be a
subset of R2 , and define C as follows. Let the set
B = {(x,O)j 0 < x < 1}; the set S = {(0,y)j 0 < y 1}; and
the set Xn ={(1/n,y)j 0 < y 1, n is a natural number}.
Let C = B U Xn U S with the subspace topology. C can be
called the "comb space". Notice that C is closed and
bounded and thus compact.
9Borsuk, 5.
18
SY/
0 B 1
FIGURE 3
With a fact about ANR sets it can easily be shown that
C is not an ANR. "Each ANR(M)-space [ANR] is locally
contractible."10 A locally contractible space is a space
which is locally contractible at every point. Locally
contractible at a point x is defined to mean every
neighborhood U of x contains a neighborhood V of x which is
contractible to a point."
Claim: The comb space is not an ANR.
Proof: Just suppose that C is an ANR. The set C is a
closed subset in R2 . Consider a point (0,y) in C. Every
neighborhood of (0,y) contains a set {(1/n,y)l n > k} for
some natural number k. Let U be a neighborhood of (0,y)
which does not contain (0,0). Since C is an ANR, by the
theorem above, let V be any other neighborhood of (0,y)
1 0ibid., 87."ibid., 28.
19
contained in U which is contractible to a point. By lemma
2.4 there is therefore a path in V from every point to the
contraction point. But there cannot be a path to the
contraction point from (0,y) and (1/n,y), since (0,0) 0 V.
Therefore C is not locally contractible and thus not an ANR.
0
Claim: The comb space,C, is deformable into S so that
every point (x,y) is mapped to the point (0,y). Thus the
points in S are mapped to themselves.
Define a map 6 : C x [0,1] -+ C by:
(x,(1-4t)y) for 0 < t < 1/4
(x+(4t-1)(y-x),0) for 1/4 < t < 1/2
((3-4t)y,0) for 1/2 < t < 3/4
(0,(4t-3)y) for 3/4 < t < 1
When t = 0, 6((x,y),0) = (x,(1-0)y) = (x,y). From line
one of the definition 6((x,y),1/4) = (x,(1-1)y) = (x,0), and
from line two 6((x,y),1/4) = (x+(1-1)(y-x),0) = (x,O). From
line two 6((x,y),1/2) = (x+(2-1)(y-x),O) = (y,O), and from
line three 6((x,y),1/2) = ((3-2)y,0) = (y,0). From line
three 6((x,y),3/4) = ((3-3)y,0) = (0,0), and from line four
6((x,y),3/4) = (0,(3-3)y) = (0,0). When t = 1 6((x,y),1) =
(0,(4-3)y) = (0,y). Therefore 6 is a deformation of C into
S. Furthermore, 61I5(Oy) = (0,y); so 611S = idS.
20
Therefore S is a deformation retract of C.
Claim: There is no retracting deformation of C into
S that satisfies the condition that the points of S are
fixed under each t E [0,1].
Proof: Just suppose there is a retracting deformation
C x [0,1] - C such that at'S = ids for all t E [0,1].
Let U be a basic open neighborhood of the point (0,1) E S.
Since by lemma 2.4 (1/n,1)(t) is a path from (1/n,1) to
61(1/n,1), for every natural number n, 6(1/n,1) = (0,0) for
some t E [0,1]. Let to = inf{tj t o (1/n,1) = (0,0), and n
is a natural number}. Then inf{d(6to(1/n,1),(0,0))I n is a
natural number} = 0. Let U be a neighborhood of 6to(0,1) =
(0,1) with radius < 1/2. Let V be any neighborhood of (0,1)
such that Cto(V) U. The set V contains a set
{(1/n,1)I n > k} for some natural number k. Since
inf{d(6to(1/n,1),(0,0))} = 0, there is a natural number n
such that d(6to(1/n,1),(0,0)) < 1/2 then d(6to(1/n,1),(0,1))
> 1/2 and 6to (l/n,l) to(V). Thus 6to is not continuous.
This contradicts the supposition that 6 is a retracting
deformation. Therefore there is no retracting deformation
of C into S such that the points of S remain fixed for all
t E [0,1].
Therefore the restriction in theorem 3.7a that the
space A be an ANR is necessary and by the proof it is
sufficient.
21
If P is the set {(0,1)}, then C can be deformed into P
by adding a retracting deformation of S into P to the
retracting deformation 6 in the previous example. Then P is
a deformation retract of C. But by a similar argument used
in the first example there is no retracting deformation
: C -+ P satisfying the condition in theorem 3.7b that
t(P) C P for all t E [0,1]. Thus the restriction that the
space A be an ANR is also necessary in theorem 3.7b.
Definition 3.8: Two spaces A and B are said to belong
to the same homotopy type if and only if there are maps
f A -B and g : B - A such that fg = idA and gf = idB.
Claim: Homotopy type is an equivalence relation on the
class of topological spaces.
Proof: For any space A define f and g to be idA*
Since idA composed with idA equals idA, idAidA ~ idA. Thus
A is the same homotopy type as itself, and homotopy type is
reflexive.
Suppose the space A is the same homotopy type as the
space B. By the definition B is also the same homotopy type
as A. So homotopy type is a symmetric relation.
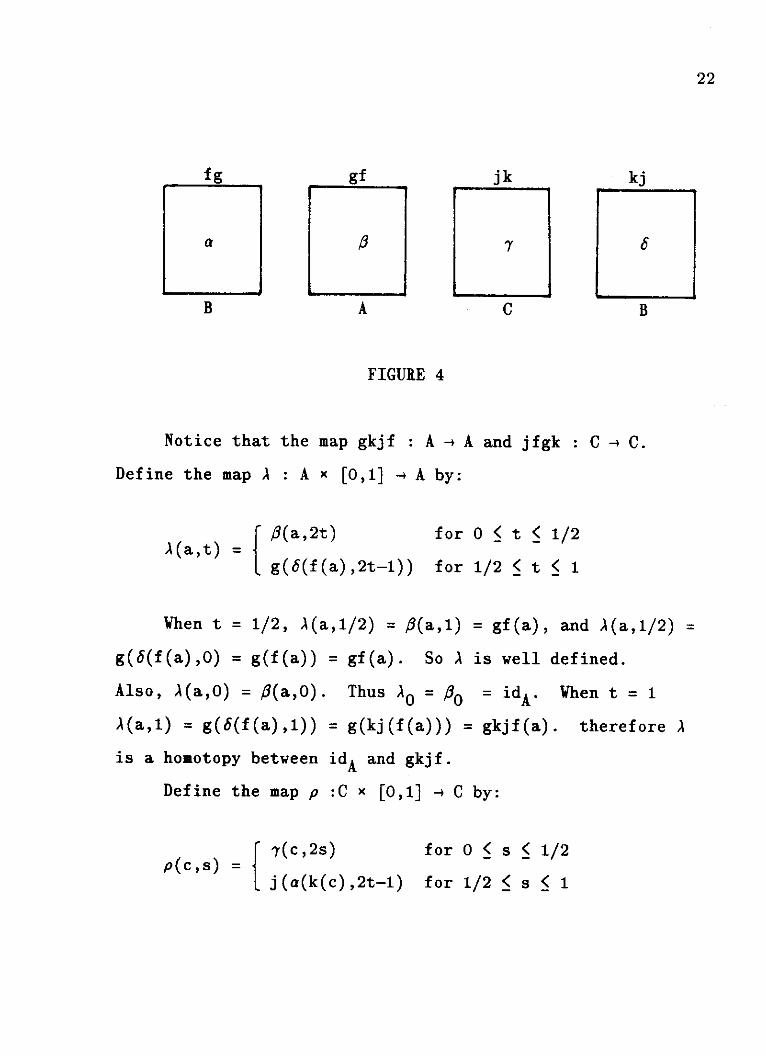
Suppose that the space A is the same homotopy type as
the space B, and B is the same homotopy type as the space C.
Then there are maps f : A -4 B and g : B - A such that
fg ~ idB and gf ~ idA. Also there are maps j : B -4 C and
k : C -4 B such that jk ~ idC and kj ~ idB'
22
fg
a
B
gf
OE
A
jk
7
-C
kj
6
B
FIGURE 4
Notice that the map gkjf A - A and jfgk C -4 C.
Define the map A A x [0,1] - A by:
A I(a,2t) for 0 ( t < 1/2
g(6(f(a),2t-1)) for 1/2 ( t ( 1
When t = 1/2, A (a,1/2) = 0(a,1) = gf (a) , and A (a,1/2) =
g(6(f(a),0) = g(f(a)) = gf(a). So A is well defined.
Also, A(a,0) = 8(a,0). Thus A0 =3 = idA. When t = 1
A(a,1) = g(6(f(a),1)) = g(kj(f(a))) = gkjf(a). therefore A
is a homotopy between idA and gkjf.
Define the map p :C x [0,1] - C by:
p (c,2s) for 0 < s < 1/2p(c,s) =ko
,j(a(k(c),2t-1) for 1/2 < s < 1
23
When t = 1/2 p(c,1/2) = 7(c,1) = jk(c), and p(c,1/2) =
j(a(k(c),O)) = j(k(c)) = jk(c). Thus p is well defined.
Now when t = 0 p(c,0) = 7(c,O); so p0 =70 = idC. When
t = 1 p(ci) = j(a(k(c),1) = j(fg(k(c))) = jfgk(c).
Therefore idC ~ jfgk by the homotopy p. Since jf : A -+ C
and gk : C - A, C and A are the same homotopy type.
Therefore homotopy type is a transitive relation, and
thus homotopy type is an equivalence relation on the class
of topological spaces.
Notice, in the special case when g = f- that ff'-
f- f = idB. Then ff~1(B) = B which implies that f is an
onto function. Since ff~t (a) = a for all a e A, f-is a
one-to-one function. And since f and f~ are both
continuous, f is a homeomorphism between A and B.
Thus the partition of the class of topological spaces
resulting from homeomorphism is a refinement of the
partition resulting from homotopy type.
Definition 3.9 If maps f : A - B and g : B - A are
such that gf ~ idA, then g is a left homotopy inverse of f,
and f is a right homotopy inverse of g. A two-sided
homotopy inverse of f is a map g which is both a left and
right homotopy inverse of f.
Therefore the spaces A and B are the same homotopy type
if and only if there is a map f from A into B that has a
two-sided homotopy inverse.
24
Theorem 3.10 Suppose A and B are topological spaces.
If a map f : A - B has both a right and a left homotopy
inverse, then f has a two-sided homotopy inverse.12
Proof: Let L and R be a left and a right homotopy
inverse of f, respectively. Define g = LfR. Then
fg = fLf. Since L is a left homotopy inverse of f,
Lf ~ idA. So fg fidAR = fR. Since R is a right homotopy
inverse of f, fg ~ fR ~ idB. Thus fg ~ idB, and g is a
right homotopy inverse of f.
Similarly gf = LfRf ~ LidBf = Lf ~ idA. Thus g is also
a right homotopy inverse of f, and therefore g is a
two-sided homotopy inverse of f.
12Ralph H. Fox, : "On Homotopy Type and DeformationRetracts," Annals of Mathematics 44 (January 1943):43. Theauthor credits M. M. Day with the idea for this proof.
CHAPTER IV
THE MAPPING CYLINDER
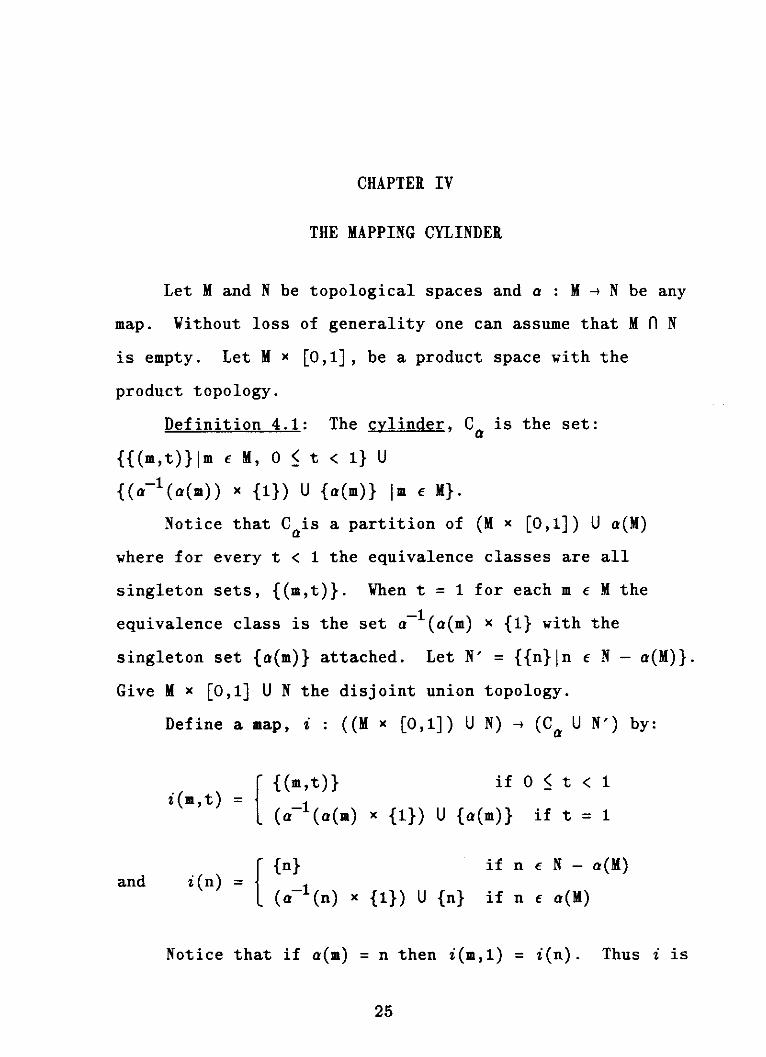
Let M and N be topological spaces and a : M - N be any
map. Without loss of generality one can assume that M f N
is empty. Let M x [0,1], be a product space with the
product topology.
Definition 4.1: The cylinder, Ca is the set:
{{(m,t)}Im E M, 0 < t < 1} U
{(a~ (a(m)) x {1}) U {a(m)} Im E M}.
Notice that Cais a partition of (M x [0,1]) U a(M)
where for every t < 1 the equivalence classes are all
singleton sets, {(m,t)}. When t = 1 for each m E M the
equivalence class is the set a~ (a(m) x {1} with the
singleton set {a(m)} attached. Let N' = {{n}jn E N - a(M)}.
Give M x [0,1] U N the disjoint union topology.
Define a map, i : ((M x [0,1]) U N) - (Ca U N') by:
{(mt)} if 0 < t < 1
i(m,t) = I (- ) i0t~(a (a(m) x {1}) U {a(m)} if t = 1
and =1n{n}1 if n E N-a(M)
(a~ (n) x {1}) U {n} if n e a(M)
Notice that if a(m) = n then i(m,1) = i(n). Thus i is
25
26
well-defined and onto the set Ca U N'; so i-'(Ca U N') is a
partition of (M x [0,1]) U N. Give Ca U N' the quotient
topology, Qi, induced by i. Then i is a quotient map, and
A C (Ca U N')is a member of Q i if and only if
i~ (A)nf (M x [0,1]) and i~ (A) f N are both open because
A x [0,1] U N has the disjoint union topology.
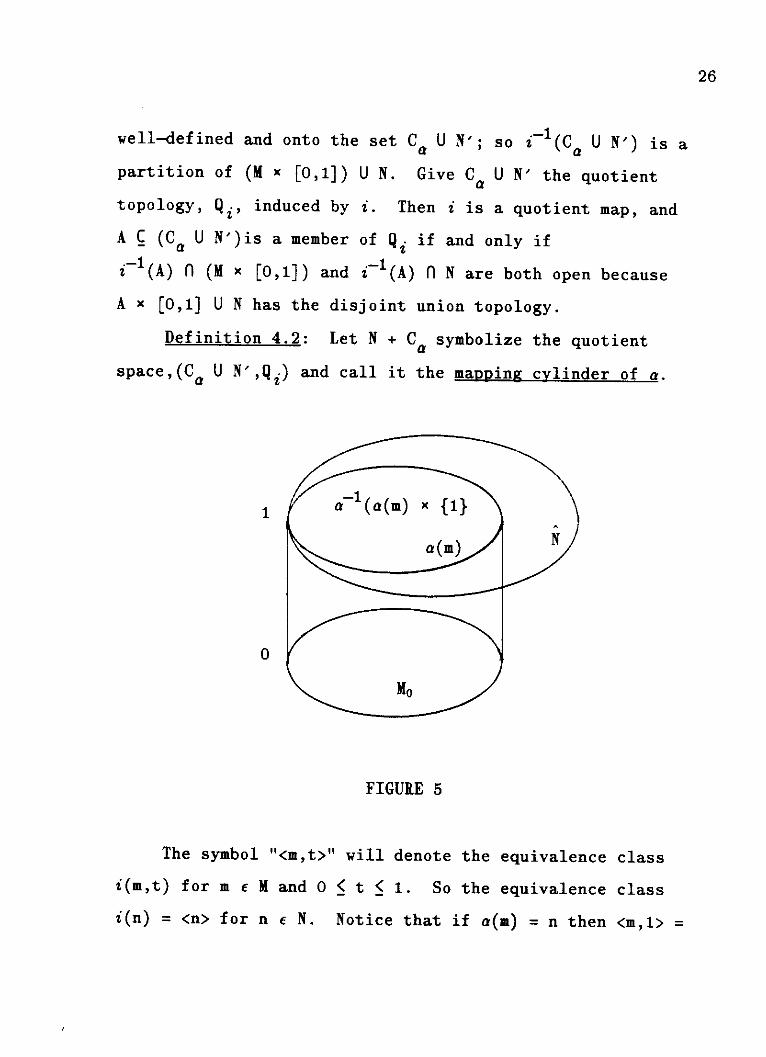
Definition 4.2: Let N + Ca symbolize the quotient
space,(C. U N',Qi) and call it the mapping cylinder of a.
a(m)N
0
FIGURE 5
The symbol "<m,t>" will denote the equivalence class
i(m,t) for m c M and 0 < t < 1. So the equivalence class
i(n) = <n> for n E N. Notice that if a(m) = n then <m,1> =
27
<n>. Thus N + Ca = {<m,t>I m f M,0 < t < 1} U {<n> fn E N}.
Let N denote the set {<n>In E N} =
{(a~ (a(m)) U {a(m)}j me M} U N'. Thus N Q N + Ca, and N
is the "top" of the mapping cylinder. Let Mo denote the set
{<m,0>| m E M}. So MO C N + Ca , and MO is the "base" of
the mapping cylinder. For each t e [0,1], the notation
1<M x {t}>" will denote the set {<m,t>I m e M}. Hereafter,
the symbol "t" will be reserved for the elements in the
interval [0,1] used to define a mapping cylinder and some
other letter, s or u, will be used for the elements of other
images of the unit interval. The set Ca , a subset of
N + Ca , can be described several ways: Ca = {{(mt)}|m e M,
0 t < 1} U {(a~1(a(m)) x {1}) U {a(m)} m e M}
= {<m,t>I m e M, 0 < t < 1} U {<n>| n e a(M)}
= {<mt> m e M, 0 < t < 1}.
Notice that il(M x [0,1]) U a(M) is the projection
function of the decomposition of (M x[0,1]) U a(M) since
i(a(m)) = <a(m)> and i(m,t) = <m,t> for all m e M and
0 < t < 1. However, i|M x [0,1] is not the projection
function of the decomposition of M x [0,1] since <m,1>
contains the element {a(m)} e N as well as the set
a~ (a(m)) g M x [0,1].
Lemma 4.3: Each map i1M x {t} for 0 < t < 1 is a
homeomorphism from M x {t} onto <M x {t}>.
Proof: Let t e [0,1). The image of i 1M x {t} is the
28
set <M x {t}> = {<m,t>I m E M} = {{(m,t)}j m E M}. By the
definition of i, iM x {t}(m<t) = m,t>. thus ZiM x {t} is
one-to-one and onto.
Let U be open in <M x{t}>. Then Uc, the complement of
U in <M x {t}>, is closed. Thus there is a closed set V in
Ca such that Uc = v la <Mx {t}>. Then Vc is open in C., and
Vc fM x {t}>=U. So i-1(U) = i-(Vcfa<M x {t}> =
i-(vc) fl i-(<M x {t}>). But i- (<M x {t}>) = M x {t}.
Since i is continuous i l(Vc) is open in M x [0,1]. Thus
i- - i-(vc) l (M x {t}) is open in M x {t}. Since U C
<M x {t}>, zi (U) = i-1|M x {t}(U). Since i is one-to-one,
1 <M x {t} =IM x {t}, SOiM x {t'(U) =
which is open in M x {t}. Thus flM x {t} is continuous.
Now let U be open in M x {t}. Then Uc is closed. Then
there is a closed set V in M x [0,1] such that V fl Mx {t} =
Uc, and U = Vc f M x {t}. Since iJM x [0,1] U a(M) is the
projection map for Ca 'M x [0,1] U a(M)(Vc) is open in Ca'
Since Vc C M x [0,1], iM x [0,1] U a(M)(c) =
tIM x [0 ,1](V) . so IM x [0 ,1](U) =
IM x [0. 1](Vc n M x {t}) = iM x [0 ,1](Vc) n
IM x L0,1](M x {t}) = iM x[0,1 ](Vc) a <M x {t}> which is
open in <M x {t}>. Since U C M x {t}, tiM x [0 1](U) =
IM x {t}(U) So IM x{t}(U) is open. Thus iJM x{t} is
an open map. Therefore iJM x {t} is a homeomorphism. o
The set Ca-._N={<m,t>I m e M, 0< t < 1} is also a
29
subset of N + Ca* Observe that since i(mt) = <m,t> for
every m E M and t E [0,1), then ill x [0,1) is continuous,
one-to-one, and onto. If U is an open set in M x [0,1),
then ijm x [0,1)(U) = {<m,t>I (mt) E U}, and
i| 1x [0, 1 )({<mt>I (m,t) E U}) = U. So i|m x [0,1) is an
open function. Therefore ilj x [0,1) is a homeomorphism
from M x [0,1) onto Ca-N.
Notice that Ca-N is the complement of N in N + C a* Now
i~ 1(C -N) = {(m,t)j n e M, 0 < t < 1} = M x [0,1) which is
open in M x [0,1] U N. Therefore Ca-N is open and N is
closed in N + Ca'
Define a map, h: X -+ X x {0} for any space X by
h(x) = (x,0) Vx e X where X x {0} is contained in the
product space, X x [0,1] and has the subspace topology.
Thus h is a homeomorphism between X and X x {0}. Then ,for
example, iMoh is a homeomorphism between M and Mo.
Lemma 4.4: The map 'IN is a homeomorphism from N ontoA
N.
Proof: The map 'N maps N into N by:
f<n> if n EN - a(M)
<a= (n) x {1} U {n}> if n e a(M)
Since each n is mapped onto a singleton set containing
itself unioned with a~1(n) if n e a(M), then 'IN is

30
one-to-one and onto its image.
Let U be an open subset of N. Since i is continuous,
i~ (U) is open in N U (M x [0,1]). Since N and M are
disjoint, ii(U) fl N is open in N. But i~ (U) l N =
ZIN (U); so 'N is continuous.
Now suppose U is an open set in N. Then iIN(U)
{<n>j n E U}. i~ ({n> n E U} = {a (a(m) x {1}j a(m) c U}
U {nj n E U} = (a-1 (U) x {1}) U U. Since a is continuous,
a~ (U) x [0,1] is open in M x [0,1] ; so a- (U) x {1} is open
in M x {1}. Thus iIN(U) is open in the image ofilN.
Therefore 'IN is an open function.
Therefore 'IN is a homeomorphism.10
Theorem 4.5: Let f X -4 Y and 6 X - Z be maps
defined for topological spaces X,Y, and Z. Then there is a
map g Y - Z such that 0 ~ gf if and only if Oh-2i~ |X0 can
be extended to Y + Cf.
31
Y + C
fT /
0 Oh-1 i-1
~X1z/
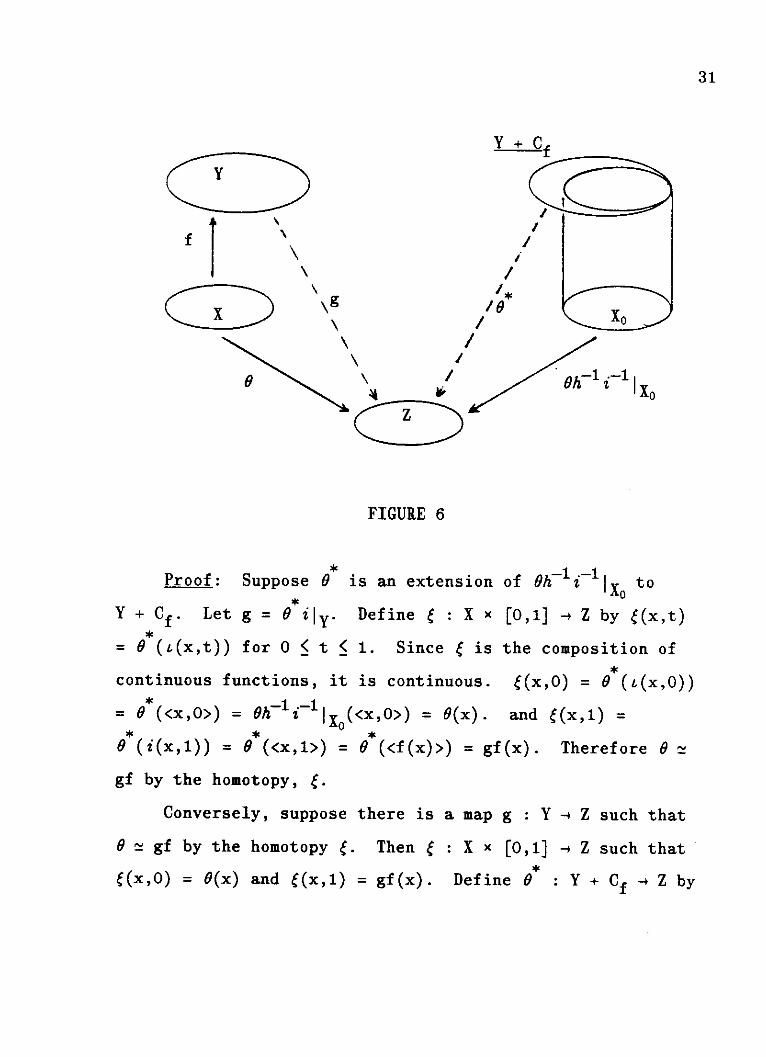
FIGURE 6
Proof: Suppose/0 is an extension of xh- i~1 X0 to
Y + C f. Let g= Oily. Define 6 : X x [0,1] -+ Z by 6(x,t)
=0 (L(x,t)) for 0 < t < 1. Since 6 is the composition of
continuous functions, it is continuous. 6(x,O) = 0 (L(x,0))
= * (<x,0>) = h-1 i-1|XO(<x,O>) = O(x) . and 6(x,1)=
0 (i(x,1))0 (<x,>) = 0 (<f(x)>) = gf(x). Therefore 0~
gf by the homotopy, 6.
Conversely, suppose there is a map g : Y Z such that
Y ~ gf by the homotopy 6. Then : X x [0,1] -+ Z such that
0(x,) = 0(x) and (x,) = gf(x). Define d :Y + C -+ Z by

32
0 (<x,t>) = 6t(x) for <x,t> E Cf, and 0*(<y>) = g(y) for <y>
EY.
Notice that if y = f(x), then 0((<y>) = g(y) = gf(x) =* *
6(x,l) = 0 (<x,1>). Therefore 0 is well defined.
Let V be an open subset of Z.. The set i-10*~1 (V) =
{(xt)I ((x,t) E V} U {y1 g(y) E V} = 1(V) U g'(V).
Since both 6 and g are continuous, i~ 20 (V) is open in
Y U (X x [0,1]). So by the definition of the topology on* 1 *Y + Cf, 0 ~(V) is open in Y + Cf. Therefore 0 is
continuous.
Now 0*XO(<x,O>) = 6(x,0) = 0(x) =0h' i-1 Xo(<x,0>).
Therefore 0 is an extension of h-'i'I|X from Xo to
Y + Cf .
Theorem 4.6: Let X,Y, and Z be spaces and 0 : X - Z as
in the previous theorem. Suppose g is a map from Y into Z.
Then there is a map f : X - Y such that gf ~ 0 if and only
if iO is homotopic in Z + C to a map, (i0'), from X into
YO. Note that 0' must be a map from X into Y.
Proof: Suppose i0 ~ iO' in Z + C by
SXx [0,1] - Z + C such that C(x,0) = iO(x) EcZ C Z + C
and C(x,1) = iO'(x) E YO Z + C . Define a map
w : Yo x [0,1] - Z + C by W(<y,0>,s) = <y,s> for 0 < s < 1
So w(<y,0>,0) = <y,0> or wo = idy, and w(<y,o>,1) = <y,1>.
Now each <y,1> E Z and for each y E Y, g(y) e <y,1>; so
<y,1> = <g(y)>. Thus w1 = ig. Therefore w is a homotopy
33
between idy and ig in Z + Cg. Since wo = idyo, then
woiO' =iO'. Consider w1iO' X - Z + C . Notice that
wiO"' (x) = wi(<O'(x),0>) since 6'(x) E Y. And wi(<z0'(x),0>)
= igO' (x) . Thus wiiO' = igO' . Also f or 0 ( s < 1
Ws(iO'(x)) = ws(<O'(x),0>) = <'(x),s>. Define
F : X x [0,1] -+ Z + Cg by F(x,s) = w siO'(x). Then F(x,O) =
w0iO'(x) = iO'(x) e Yo, and F(x,1) = wiO'(x) = igO'(x) E Z.
So F is a homotopy between iG' and igO' in Z + C .g
Claim: The map iG is homotopic to igO'.
Define : x [0,1] -+ Z + C by:
xs) =f((x,2s) for 0 < s ( 1/2
F(x,2s - 1) for1/2 < s < 1
Then 6(x,0) = ((x,0) = iO(x) , and (x,1) = F(x,1) =wii9'(x)
= igO'(x). Since 6(x,1/2) = ((x,1) = iO'(x) and also
6(x,1/2) = F(x,0) = woi9'(x) = iG' x), 6 is continuous and
is a homotopy between iG and ig9' in Z + C .
Claim: The map 0 is homotopic to gO'.
Define 6 : Z + C -+ Z by 6(<z>) = z and 6(<y,t>) = g(y)
Let U be open in Z. The set i-16-1 (U)
= i~'({<zz> z E U} U {<y,t>j y e g~1(U), 0 < t < 1})= {zI Z E U} U {(Y,1)I y E g1(U)} U
{(y,t) ) y ( g(U) 0 t< 1}= U U { (y, t)I Y C g~1 (U),) 0 < t <I 1} = U U (g~1 (U) x [0,21] ).
34
Since g is continuous, g~1 (U) is open, and thus 61 (U) is
the union of open sets in Z + C . Therefore 6 is
continuous.
Then the composition 66 : X x [0,1] - Z is continuous.
Also 66(x,0) = 6(iO(x)) = 6<0(x)> = 0(x), and
66(x,1) = 6(ig0'(x)) = 6(<g0'(x)>) = gO'(x). So 6 is a
homotopy between 0 and gO'. Let f = 0'. Therefore 0 ~.. gf.
Conversely, suppose there is a map f : X - Y such that
gf ~ 0 by some homotopy. Reverse that homotopy to define
6 : X x [0,1] -4 Z such that 6(x,0) = 0(x) and 6(x,1) = gf(x)
Define w : Yo x [0,1] - Z + C by w(<y,O>,s) = <y,s>. So
o = idYO and w1 = ig. Now the map, i6 : X x [0,1] -4 Z + Cg
is continuous. Also, i6(x,0) = i(0(x)) = <0(x)> E Z, and
i6(x,1) = igf(x) = <gf(x)>. Recall the map, h :Y - Y x[0,1]
such that h(y) = (y,0) is a homeomorphism. Thus igf =
wlihf. Since w Yo x [0,1] - Z + C and ih(f (x)) E Yo, then
woihf ~ wihf. But woihf = idYOihf = ihf : X - Yo. Define
A : X x [0,1] - Z + C by:
f=i6(x,2s) for 0 <s < 1/2
,x=w(ihf(x),2 - 2s) for 1/2 < s < 1
Then A(x,0) = i6(x,0) = iO(x) , and A(x,1) = w(ihf(x),0)
= ihf(x). When s = 1/2, A(x,1/2) = i6(x,1) = igf(x), and
A(x,1/2) = w(ihf(x),1) = igf(x). Therefore iO ~ ihf by the
35
homotopy A, and ihf : X -+ YO. 0
If the space Z in theorem 4.5 equals the space X, and 0
is the identity on X then the theorem becomes:
Theorem 4.5a: If f : X - Y, then there is a map
g : Y - X such that gf ~ idx if and only if idxh-'i-1 Xl can
be extended-to Y + Cf.
This gives a necessary and sufficient condition for X to be
the homeomorphic image of a retract of the mapping cylinder.
Corollary 4.7: Suppose f is a map from a space X into
a space Y. The set Xo is a retract of Y + C if and only if
the map f has a left homotopy inverse
Proof: Suppose Xo is a retract of Y + Cf. Then there
is a map r : Y + Cf -4 Xo such that rI. = id. Thus r is an
extension of idX from Xo to Y + Cf, and h1i~ I 0rIX 0 =
h1 i~ 1I|idXo = h~ = idXh' i17'XO. So h1i-Ir is
an extension of idXh'1i'I XO to Y + Cf. Then by theorem
4.5a there is a map g : Y - X such that gf ~ idX , and g is
a left homotopy inverse of f.
Conversely, suppose f has a left homotopy inverse, say
g. So g : Y -4 X such that gf ~. idX. Then by theorem 4.5a
id i~IX0can be extended to Y + Cf; call the extension r
Then r : Y + Cf -+ X where r I = idxh~Ii'IX Thus r is a
retraction and Xo is a retract of Y + Cf. 0
Lemma 4.8: Any mapping cylinder can be deformed into
its top.

36
Proof: Suppose f maps X into Y. Define a map
Y + Cf x [0,1] -+ Y + Cf by r(<x,t>,s) =
i(xt + s(i - t)) for all <x,t> E Cf and r(<y>,s) = <y> for
all <y> E Y. If f(x) = y then r(f(x)) = r(<x,1>,s) =
i(x, 1+ s(1 - 1)) = i(x,i) = <x,1> = <f(x)> = <y> =
r(<y>,s). Thus r is well defined. Also r(<x,t>,0) =
i(x,t + 0(1 - t)) = i(xt) = <x,t>, and r(<y>,0) = <y>. So
0= id Y + Cf Finally, 7(<x,t>,1) = i(x,t + 1(1 - t) -
i(x,1) = <x,1> E Y , and r(<y>,1) = <y> Thus r1(Y + Cf) = Y.
It remains to show that r is continuous.
Let U be open in Y + Cf.
Claim: Every point in r~1(U) is an interior point.
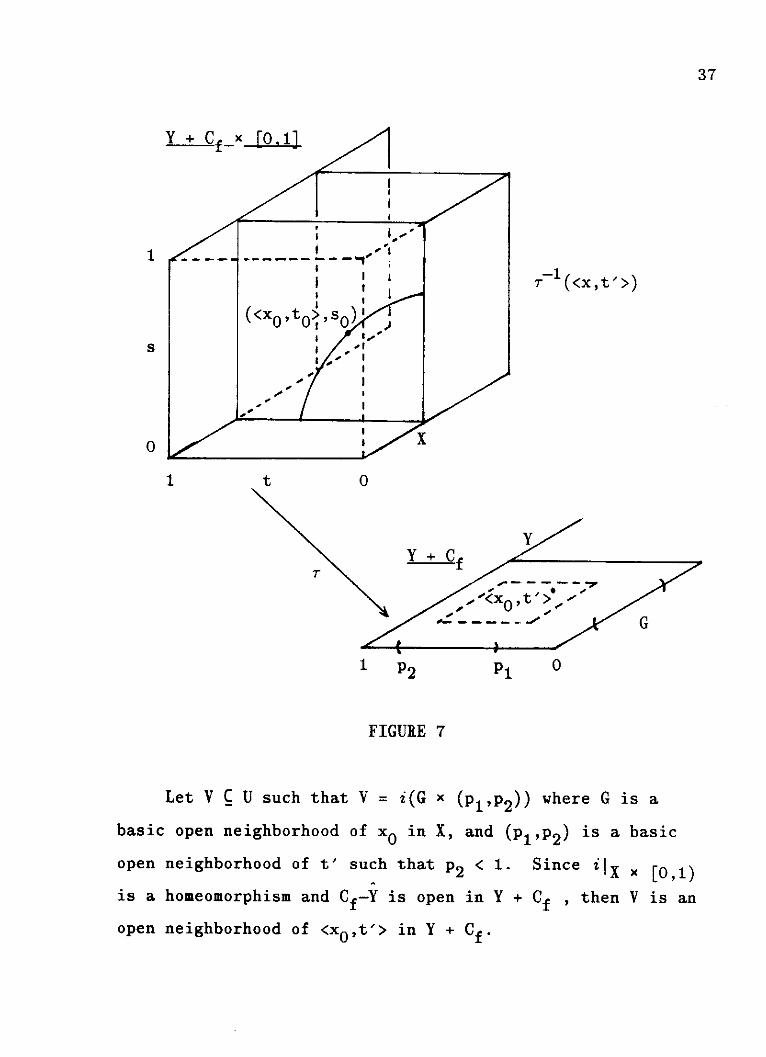
Let (<xo0 ,t0>,s0 ) E r'(U). Then r(<x 0,t0>,s0) ~~
<X0,to + s0 (1 - to> = Ox0,t'>, where t' = t0 + so(' - to)*
Case 1: Suppose t 0 < 1 and s0 < 16
Claim: The point t' E [0,1] is less than 1.
Just suppose t' =1= t0 +s 0 (1 - t0). If to # 0, then
s t0 1. But this is not the case. If t0 =0, then
1 = 0 + so(' - 0) and s0 = 1. Again, this contradicts the
hypothesis. Thus t' # 1; so t' < 1.
Y + C 2
1o . .
r- (<x,t'>)
;7x
7+C
<x00,t- - -- - - wn 4000 G
1 p2
FIGURE 7
Let V C U such that V = i(G x (p1,p2)) where G is a
basic open neighborhood of x0 in X, and (p1,p2) is a basic
open neighborhood of t' such that p2 < 1. Since jX x [0,1)
is a homeomorphism and Cf-Y is open in Y + Cf , then V is an
open neighborhood of <x0 ,t'> in Y + C,.
[o 3_1]
37
(<x 0 t >s -I
0
40~1000
de -
-4IdoI
. ~I-~---~ &
s
0
1 t 0
p10
I
eoeollo
38
Now r-1(G x {p2 }) = {(<x,t>,s)I x E G, t+s(1-t) = p2}.tQ + p
Choose t2 = -to+P . Thus t0 P 2 < 1. Since V is
open in Y + Cf, there is a p' such that t' < p' <p2 and
<xoP'>e U. So choose s2 such that so < s2 and
r(<x0 ,t2 >,s2) = <x0,p'> E V. Also r (G x {p1}) =
{(<x,t>,S) x E 0 ,t+s(1-t) = p1} so choose s I< s0 and
t < t0 such that r(<x0 ,t1 >,sl) = <x,p'> where p1 < p' < t'.
Let V = {(<x,t>,s)j x E G; s < S< <S2; t1 < t < t2}'
Then V = {<x,t> x c ox' t < t < t2} x (s,,s2) , or
i(G x (t1 ,t2)) x (s1,s2). Thus V is open in Y + Cf x [0,1],
and contains (<x0 ,t0 >,s 0).
Let (<x,t>,s) be a member of V. Then r(<x,t>,s)) =
<x,t+s(1-t)>. But x E G and t1 +s1(1-t) < t+s(1-t) <
t2 +S2(1-t2);so r(<x,t>,s) E V C U. Therefore V Q r 1 (U).
Case 2: Suppose t0 = 1. Then r(<x0 ,1>,s) = <x0 '1> for
every s E [0,1]. Then let V C Y + Cf such that V =
i(G x (p1,1]) where G is a basic open neighborhood of x0 in
X, and (p1l] is a basic open neighborhood of 1. Then V is
an open neighborhood of <xo 0 ,1> in Y + Cf. By the same
argument as above every point in r~1(U) is an interior
point.
Case 3: Suppose s0 = 1. Then t' = t + 1(1 - t) = 1
for every t E [0,1]. Then similarly every point in r-(U)
is an interior point.
39
Thus r~1(U) is open, and r is continuous.
Therefore r is a deformation of Y + Cf into Y. o
Hereafter the symbol "-r" will be used to denote this
deformation in any mapping cylinder.
When the space X is the space Z and the map 0 is the
identity on Y, theorem 4.6 becomes:
Theorem 4.6a: If g is a map from Y into Z, then there
is a map f : Z - Y such that gf ~ idz if and only if iidz is
homotopic in Z + C to a map from Z into Yo.
Using this theorem the following corollary yields a
necessary and sufficient condition for the mapping cylinder
to be deformable into its base.
Corollary 4.9: Let Y and Z be spaces and g : Y - Z be
any map. Then Z + C can be deformed into Yo if and only if
the map g has a right homotopy inverse.
Proof: Suppose Z + C can be deformed into Yo. Then
there is a deformation 6 : Z + C x [0,1] - Z + C such that
6(<y,t>,0) = <y,t>, and 6(<z>,0) = <z>. Thus 60 = idz + C g
Also 6(Z + C x {1}) = YO. For every s E [0,1] , the map
6s ilZ is the composition of continuous maps, and 6s maps
ij(Z), a subset of Z + C , into Z + C . Thus
6| : ilz(Z) x [0,1] -4Z + C such that 61i(ilz(Z) x {0}) =
61j(Z x {0}) = id% , and 61i(ilZ(Z) x {1}) = 61j(Z x {1}) Q
Yo. Thus 6bj is a homotopy between the map idz = iIgidZ =
40
iidz and the map 611ji1Z which maps Z into Yo. Therefore by
theorem 4.6a, there is a map f : Z - Y such that gf ~ idz;
so g has a right homotopy inverse.
Conversely, suppose g has a right homotopy inverse,
say f. Then by theorem 4.6a, iidz is homotopic to a map,
say iG', which maps Z into Yo. Call this homotopy (. Thus
: i(Z) x [0,1] -. Z + C such that ((i(Z) x {0}) = iidz(Z)Ag
Z , and ((i(Z) x {1} = iO'(Z) = Yo. By lemma 4.8, Z + Cg
can be deformed into Z by the deformation r where
70 =idZ + C and r(Z + C ) = Z. Define
6: Z + C x [0,1] -. Z + C by:
6(cyt>,s)=Ir(<y,t>,2s) for 0 ( s < 1/2
((r1 (<y,t>,2s - 1)) for 1/2 < s I 1
and
r(<z>,2s) for 0 < s < 1/2
((r1 (<z>),2s - 1) for 1/2 < s ( 1
Notice that 6(<y,t>,1/2) = r(<y,t>,1) = <y,1>, and
6(<y,t>,1/2) = ((r1(<y,t>),2(1/2) -1) = ((r (<y,t>),0) =
((<y,1>,0) = <y,1>. Also 6(<z>,1/2) = r(<z>,1) = <z>, and
6(<z>,1/2) = ((rl<z>,0) = ((<z>,0) = <z>. Clearly, when
g(y) = z then 6(<z>,s) = 6(<g(y)>,s) = 6(y,1>,0. So 6 is
well defined. Then 6(<y,t>,0) = r(<y,t>,0) = r0(<y,t>) =
<y,t>, and 6(<z>,0) =r(<z>,0) = <z>. In other words, 60
41
idz + C . Also 6(<y,t>,1) = ((r (<y,t>),2(1) - 1) =
((<y,1>,1) by the definition of r. So 6(<y,t>,1) =
((<Y,1>,1) = ((<g(y)>,1) =((t(g(y),l) = to'(g(y)) E Yo.
Finally, 6(<z>,1) = ((7-1(<z>),2(1) - 1) = ((<z>,1) again, by
the definition of r. So 6(<z>,1) = ((<z>,1) = ((i(z),1) =
i0'(z) E Yo. Thus 61 (Z + C ) C YO.
Therefore 6 is a deformation of Z + C into Yo. 0
Theorem 4.10: There is a map f : X - Y such that X0 is
a retract of Y + Cf if and only if there is a map g : Y -4 X
such that X + C can be deformed into YO.
Proof: Suppose there is a map f : X - Y such that X0
is a retract of Y + Cf. By corollary 4.7, f has a left
homotopy inverse, say g. Then g : Y -a X such that gf ~ idX.
Thus g has a right homotopy inverse. Then by corollary 4.9
X + C can be deformed into Yo.
Conversely, suppose there is a map g : Y -i X such that
X + C can be deformed into Yo. By corollary 4.9, g has a
right homotopy inverse, say f. Then f : X - Y such that
gf ~ idx. Thus f has a left homotopy inverse. Then by
corollary 4.7, Xo is a retract of Y + Cf. 0
Theorem 4.11: Let X, Y, and Z be topological spaces
and 0 be a map from X into Z. There is a map f : X -4 Y such
that the map Oh~i|j1 which maps Xo into Z can be extended
to Y + Cf, the mapping cylinder of f, if and only if there
42
is a map g : Y -. Z such that iG is homotopic in Z + Cg, the
mapping cylinder of g, to a map from X into Yo.
Recall that X0 is the base of the mapping cylinder of f
and Yo is the base of the mapping cylinder of g. The map i
is the projection map for a mapping cylinder. Which
cylinder should be clear from the context. The map h is the
homeomorphism from any space M to M x {Q}. Its particular
domain and range should also be clear from the context.
Proof: Suppose there is a map f : X - Y such that
9h' i~ IXO can be extended to Y + Cf. By theorem 4.5 there
is a map g : Y -+ Z such that gf ~ 0. Then by theorem 4.6,
iG is homotopic in Z + C to a map from X to Yo.
Conversely, suppose there is a map g : Y -4 Z such that
iO is homotopic to a map from X to Yo. By theorem 4.6 there
is a map f : X -+ Y such that fg ~ 0. Then by theorem 4.5
0h' i_1'XO can be extended to Y + Cf.
Theorem 4.12: Suppose X and Y are topological spaces,
and f is a map from X into Y. Then X0 is a deformation
retract of Y + Cf if and only if f has a two-sided homotopy
inverse.
Proof: Suppose X0 is a deformation retract of Y + Cf.
By theorem 3.3, X0 is a retract of Y + Cf, and Y + Cf can be
deformed into X0. By corollary 4.7, since X0 is a retract
of Y + Cf, f has a left homotopy inverse. By corollary 4.9,
since Y + Cf can be deformed into Xo, f has a right homotopy
43
inverse. By theorem 3.10, since f has both left and right
homotopy inverses, f has a two-sided inverse.
Suppose, conversely, that f has a two-sided homotopy
inverse. Since f a left homotopy inverse, by corollary 4.7
Xo is a retract of Y + Cf. And, since f has a right
homotopy inverse, by corollary 4.9, Y + Cf can be deformed
into Xo. Then by theorem 3.3, Xo is a deformation retract
of Y + Cf
Theorem 4.13: Two topological spaces belong to the
same homotopy type if and only if they both can be embedded
in a third space, V, in such a way that their images are
both deformation retracts of V.
Proof: Let X and Y be two topological spaces. Suppose
X and Y belong to the same homotopy type. As a consequence
of the definition of homotopy type, there is a map f : X - Y
such that f has a two-sided homotopy inverse. Then by
corollaries 4.7 and 4.9, Xo is a deformation retract of
Y + Cf. Notice that Y is a retract of Y + Cf by the map
r :Y + Cf -+ Y where r(<x,t>) = <x,1> and r(<y>) = <y>. By
lemma 4.8, Y + Cf can be deformed into Y. Thus by
theorem 3.3, Y is a deformation retract of Y + Cf.
Therefore X and Y are homeomorphically embedded in Y + Cf
and both are deformation retracts of Y + Cf.
Conversely, suppose X and Y are embedded in a space V
such that the homeomorphic images of X and Y are both

44
deformation retracts of V. Then there is a deformation
6 : V x [0,1] -+ V such that 6(w,0) = w for all w E V, and
6(V x {1}) = Xo, and 611X" = idX. Notice also that
61|y : YO - Xo. There is also a deformation
A : V x [0,1] -+ V such that A(w,0) = w for all w E V, and
A (V x {1}) = Yo, and A 1 yO = idyO. Similarly,
A11O : XO YO
Define the homotopy, : V x [0,1] -4 V by
(wt) = A(6(w,t),t). Then 6(w,0) = A(6(w,0),0) =
A(w,0) = w. That is, 60 = idw. Also, 6(w,1) = A(6(w,1),1)
= A(61(w),1) = A1 61(w). In other words, 61 = A1 61 =
A IX01. Thus idV A i I X061 by the homotopy (. Therefore
idy0 = idiy0 = 1 1x061yo.
Similarly, define the homotopy ( V x [0,1] - V by
((wt) = 6(A(w,t),t). Then ((w,0) = 6(A(w,0),0) =
6(w,0) = w; so (0 = id- . Also ((w,1) = 6(A(w,1),1) =
6(Al(w),1) = 61 A,(w); so (1 = 611y A1. Thus idy = 61Iy0Ai
and idxo =611YOA 11xO. Therefore the map, 6iiy has a
two-sided homotopy inverse, namely, AiXo. By the
definition Xo and Yo are the same homotopy type, and thus
their homeomorphic images, X and Y, are the same homotopy
type.
CHAPTER V
APPLICATIONS
Definition 5.1: A space X is said to be inessential
relative to a subset B if and only if there is a deformation
of X into a proper subset D such that the points of B remain
fixed during the deformation.
Theorem 5.2: Let f : X -+ Y such that Y + Cf is an ANR,
and suppose f has a right homotopy inverse. If V is a
proper subset of Y + Cf containing X0 and k : Y -+ V such
that kfh- 1 X1 x ~ idyIl 0 , then Y + Cf is inessential
relative to X0.
Proof: Letf : X -+ Ybe a map such that Y + Cf is an
ANR and f has a right homotopy inverse.
Suppose V is a proper subset of Y +Cf which contains
X0 and k : Y -+ V is a map such that kfh'1i~I ~id1X'
Notice that by identifying V with Z in theorem 4.5 and
o with idX ih : X -+ V then k can play the role of g. Then
theorem 4.5 says: Given spaces X, Y, and V; the map
f: X -+ Y; and the map idX ih : X -+ V; then there is a map
k : Y -+ V such that idxoih ~ kf if and only if
(idxih)h- i- |XO = idX 0 can be extended to Y + Cf.
Since ijX0 and h are homeomorphisms, kfhFii 1
idVIX0 implies that kf ~ idVlXoih. Thus by the above
45
46
version of theorem 4.5, idyI = idX: Xo -4 Xo C V can be
extended to Y + Cf. Let A : Y + Cf -+ V be an extension; so
A| = idX. Since f has a right homotopy inverse, by
corollary 4.9, Y + Cf can be deformed into Xo. By theorem
2.4, A is homotopic to idY + Cf and there is a deformation
r such that no = idY + Cf and = A. Since Y + Cf is an
ANR, by theorem 3.6 there is a deformation 6 such that the
fixed points of A, namely X0, remain fixed for every 6 t
Therefore Y + Cf is inessential relative to X0. 0
Theorem 5.3: If f maps the ANR X into Y = {y} and X0
can be contracted in a proper subset of Y + Cf, then Y + Cf
is inessential relative to Xo.
Proof: Since Xo can be contracted in a proper subset
of Y + Cf , let V C Y + Cf be that set. Thus there is a
deformation p : V x [0,1] -+ V, and a point xc in Xo such
that p0 = idV and p,(Xo) = {xc} gXo. Clearly pIj0 = idXO.
Let k : {y} -4X be a map defined by k(y) = xc. Since fk
{y} -4 {y}, fk = idy, and fk ~ idy. Thus f has a right
homotopy inverse. Now kfh'i1IXO is a map from X0 into
{xc} so kfh~'i~ XO p1j XOSince pjXOI ~ 0|XO, then
kfhf'i-|X0 ~ idXO.
It only remains to show that Y + Cf is an ANR in order
to conclude from theorem 5.2 that Y + Cf is inessential
relative to Xo.
47
Notice that since Y = {y}, Y + Cf = Cf =
{<x,t>| x E X, 0 < t < 1}
Claim: The set Y + C, is an ANR.
Let E be a separable, metrizable space which contains
Y + Cf as a closed subset. Define a function
PI: Y + Cf -+ [0,1] by P1(<x,t>) = t. Let V be an open
subset of [0,1]. Then P i(V) = {<x,t>I x E X, t E V}. Now
i~ (<x,t>I x e X, t e V}) = X x V possibly unioned with Y if
1 E V. But X x V is a subbase element of X x [0,1]; so
i~ (<x,t>I x c X, t e V} is open in X x [0,1] U Y. Thus
P~ (V) is open in Y + Cf. Therefore PI is continuous.
Since E is metrizable and therefore normal and Y + Cf is
closed in E, then by Tietze's Extension Theorem13 P can be
extended to all of E. Call this extension Pj. Thus
Pj : E -+ [0,1] such that Pj|y + Cf = I
Define a function PX : Y +Cf -+ X by PX(<x,t>) = x.
Let U be an open subset of X. The set Pj1(U) =
{<x,t>l x E U, 0 < t < 1}. The set i~1P 1 (U) =
{(xt)j x E U, 0 < t < 1} U Y = ({xj x e U} x [0,1]) U Y.
Thus i~'(Px'(U)) is open in Y + Cf. Therefore PX is
continuous.
Since X is an ANR and Y + Cf is closed in E, then by
'3Stephen Willard, General Topology (Reading, Mass.:Addison-Wesley Publishing Co.,1970) 103.
48
the Borsuk-Kurotowski Theorem'4 Px can be extended to an open
neighborhood,W, of Y + C, in E. Call the extension Pj.
Thus P : V - Y + Cf such that PjIY + Cf = X
Define a function r :V - Y + Cf by
r(e) = <P'(e),Pf(e)>. Let U be an open subset of Y + Cf.
Then r 1(U) = {ei P(e) = x, Pf(e) = t for some <x,t> e U} =
{ei Pj(e) = x, O <t <l1 for some <x,t> e U}fl
{eij Pj(e) = t, x E X for some <x,t> E U} =
Pf'(U) fl Pj(U). Since both P' and Pf are continuous,
r~ (U) is the intersection of open sets and r is continuous.
Notice that if e E Y + Cf, then e is some <x,t>, and r(e) =
r(<x,t>) = <P(x,t>),P'(<x,t>)> = <x,t>. Thus ry + C
idY + Cf. So r is a retraction of V onto Y + Cf, and Y + Cf
is an ANR.
Therefore by theorem 5.2, Y + Cf is inessential relative to
X0. 0
Fox describes an interesting subclass of retracting
deformations, and shows a correspondence with a subclass of
two-sided inverses.15
14Ralph H. Fox, "A Characterization of Absolute Retracts,"Bulletin of the American Mathematical Society 48 (1942) 273.
15Ralph H. Fox, "On Homotopy type and DeformationRetracts," Annals of Mathematics 2, 44 (1943) : 47-48.
49
Definition 5.4: Let Y + Cf be the mapping cylinder of
f X - Y and p be the retraction of Y + Cf into Y defined
by p(<x,t>) = <f(x)> = <x,1> and p(<y>) = <y>. Then a
retracting deformation 6 of Y + Cf into Xo is special if and
only if in addition to the usual conditions:
6 : Y + Cf x [0,1] - Y + Cf such that 60 = idY + C f
61 (Y + Cf) = X0, and 61XO = idXO; 6 also satisfies the
following two conditions:
i) For every s E [0,1] 6s'X0 = idXO.
ii) For every x E X whenever t = s
p(6(<f(x)>,s)) = p(6(<xt>),1)
Here s is the deformation parameter, and t is the mapping
cylinder parameter.
Definition 5.5: A two-sided inverse, g, of the map
f : X -4 Y is special if and only if there are homotopies
F and G such that in addition to the usual properties,
F : X x [0,1] - X such that F0 (x) = x and F,(x) = gf(x),
G : Y x [0,1] -4 Y such that GO(y) = y and G1 (y) = fg(y), the
condition f(F(x,s)) = G(f(x),s) is satisfied.
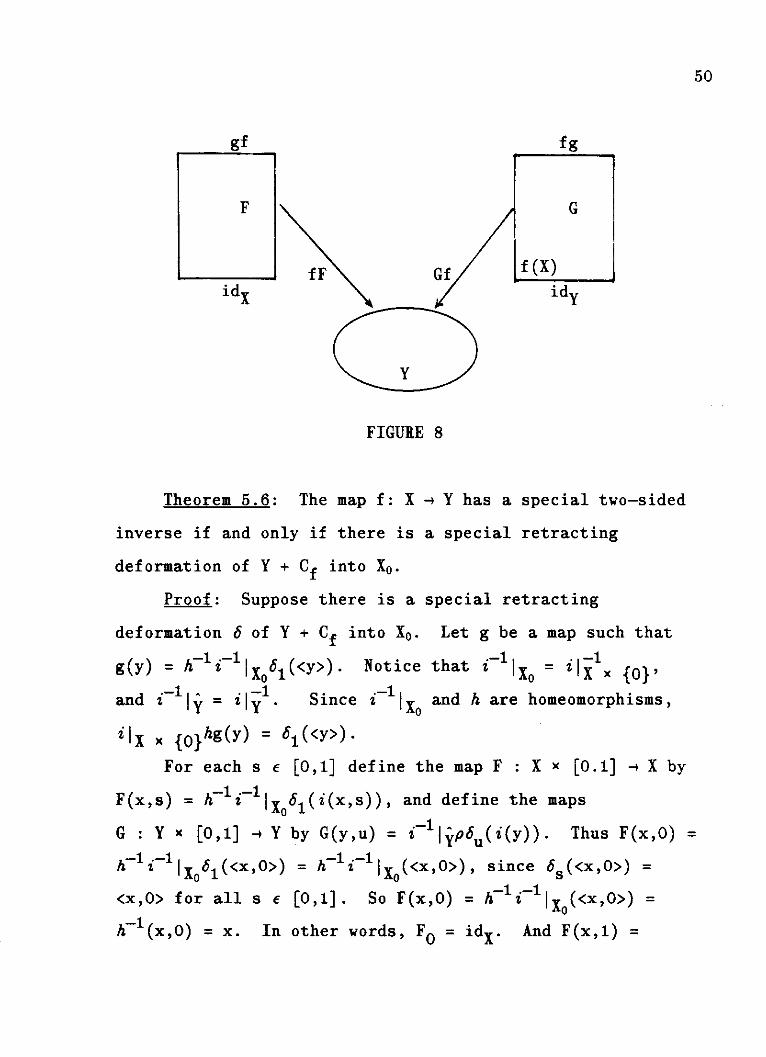
50
gf
F
idXfF Gf
Y
fg
G
f()idy
FIGURE 8
Theorem 5.6: The map f: X -+ Y has a special two-sided
inverse if and only if there is a special retracting
deformation of Y + Cf into X0 .
Proof: Suppose there is a special retracting
deformation 6 of Y + Cf into X0. Let g be a map such that
g(y) = h 1i~ X01(<y>). Notice that i~ -= x {o}'
and i_ j = ilj. Since i_1 X and h are homeomorphisms,
ijX x {0 }hg(y) =1<y>).
For each s E [0,1] define the map F : X x [0.1] -+ X by
F(x,s) = h-1C1X61(i(x,s)), and define the maps
G : Y x [0,1] -+ Y by G(y,u) = i'Ily6u(i(y)). Thus F(x,0) =
h~ i 1 IX061(<x,O>) = h'1i~xo(<x,0>), since 6s(<x,0>) =
<x,0> for all s E [0,1]. So F(x,0) = h-1i-I Xo(<x,0>) =
h~1 (X,0)= x. In other words, F0 = idx. And F(x,1) =
51
h~ i X61 (<x,1>) = h-1 i-1 IX61 (cf x)) = g(f(X))' So
F1 = gf. Also G0(y) = 0 p6 (<y>,0) = ijy1p(<y>) =
iJy (<y>) = y. So G = id . And G(y,1) = i l~ p6(<y>,1) =
iIl'p(i X x {0}hg(y)) since 6(<y>,1) = jX x {01 hg(y). So
G(y,1) = il|~1p(iX. x {0}(g(y),0)) = il~Iip(g(y),O) =
ijyj<f(g(y)> = f(g(y)). So Gi = fg. Then idx ~ gf by the
homotopy F, and idy ~ fg by the homotopy G. Therefore g is
a two-sided homotopy inverse of f. In additionhowever,
f(F(x,s)) = f(h-1 z I, 6 (<x,s>). Now f(h- i-1lX b1(<x, s>)
= f(h~ &'I(<x',s>) for some x' c X. The map
i- Y1p6(<xs>) = il-1p(<x',0>), for the same x' E X, so
i|~Y p6(<x,s>) = i|~1 (<f(x')>) = f(x'). Thus f(F(x,s)) =
il1 pol(<x,s>) for every s E [0,1]. Since 6 is a special
retracting deformation, p61(<x,s>) = p6s(<f(x)>). Thus
f(F(x,s)) = i l~ pI(<x,s>) = iIl~- p6s(<f(x)>) = G(f(x),s).Therefore g is a special two-sided homotopy inverse of f.
Conversely, suppose g is a special two-sided homotopy
inverse of f, and F and G are the homotopies satisfying the
condition f(F(x,s)) = G(f(x),s). Recall that Cf C Y + Cfand Cf = {<x,t>I x E X , 0 < t < 1} where f(x) E c<x,1> for
every x e X. Define a function : Cf x [0,1] -+ Cf by:
ihF(x,t(2u+1)); 0 < t < 2u/2u+1, 0 < u ( 1/2
(<x,t>,u)= <F(x,2u),t(2u+1)-2u)>; 2u/2u+1 (t< 1, 0 u 1/2
ihF(x,2t); 0 < t < 1/2, 1/2 ( u < 1
.g(f(x)), 2t-1)(2-2u)>; 1/2 < t< 1, 1/2 < u < 1
52
Line one and line two of the definition of 6 overlap
when t = 2u/2u+1 and 0 < u < 1/2. Then 1(<x,2u/2u+1>,u) =
ihF(x,(2u/2u+1)(2u+1)) = ihF(x,2u) = <F(x,2u),0>. Also
f(<x,2u/2u+1>,u) = <F(x,2u),(2u/2u+1)(2u+1)-2u> =
<F(x,2u),0>
Line three and line four of the definition of 6 overlap
when t = 1/2 and 1/2 < u < 1. Then 6(<x,1/2>,u) =
ihF(x,2(1/2)) = ihF(x,1)) = <g(f(x)),0>. And 6(<x,1/2>,u) =
<g(f(x)),(2(1/2)-1)(2-2u)> = <g(f(x)),0>.
When line two and three overlap u = 1/2. The condition
2u/2u+1 < t < 1 becomes 1/2 < t < 1. Thus when line two and
line three overlap t = 1/2 also. Then 6(<x,1/2>,1/2) =
ihF(x,2(1/2)) = <F(x,1),0> = <g(f(x)),0>. And
6(<x,1/2>,1/2) = <F(x,1),(2(1/2)-1)(2-2(1/2))> =
<g(f(x)),0>. Since <x,1> = <f(x)>, when 0 < u < 1/2
6(<f(x)>,u) = 6(<x,1>,u) = <F(x,2u),(1)(2u+1) -2u)> =
<F(x,2u),1> = <f(F(x,2u)> = <G(f(x),2u> E Y. When
1/2 < u < 1 6(<f(x)>,u) = 6(<x,1>,u) = <g(f(x)),(1)(2-2u)>.
Therefore 6 is well defined on Cf and is continuous. Thus (
is a deformation of Cf onto X0 .
For every <x,0> E Xo, (<x,O>,u) = ihF(x,2u) = <x,0>
for every u e [0,1]. Thus 6 is a retracting deformation
that satisfies condition i.
Claim: Condition ii is also satisfied by 6'.
Condition ii requires that p(M(<f(x)>,u)) =
53
p( (<x,u>,1)). If 0 < u < 1/2, p6(<ff(x)>,u) = p(6u(cx,1>)
<F(x,2u),1> = <fF(x,2u)>, and p6(<x,u>,1) = pihF(x,2u) =
p<F(x,2u),0> = <fF(x,2u)>. If 1/2 < u < 1, p6(<f(x)>,u) =
p(<g(f(x)),2-2u>) = <fgf(x)>, and p6(<x,u>,1) = p<g(f(x),0>
= <fgf(x)>. Thus whenever u = t p6(<f(x)>,u) = p (<x,t>,1).
Therefore 6 is a special retracting deformation of Cf into
Xo.
Since G and g are both defined for all of Y, the
definition for 6 can be extended to Y + Cf by:
S((<x,1>,u) for <y> e Cf
'(<y>,u) = <G(y,2u)> for <y> E Y - Cf, 0 < u ( 1/2
<g(y),2-2u> for <y> EY - Cf, 1/2 < u ( 1
Clearly 6' agrees with 6 if y = f(x). therefore 6' is
a retracting deformation Y + Cf onto Xo. 0
Definition 5.7: A homotopy 6 : X x [0,1] -+ M where M
is a metric space with metric d is called a c-homotopy if
and only if d(6(x,t 1), (xt2)) < E for every t1 and t2 in
[0,1] and every x in X. In particular,
d(6(x,0),6(x,1)) < E. If the homotopy is between maps f and
g, write f ~f g . If 6 is a deformation, call it a
e-deformation.
Definition 5.8: Let X and Y be metric spaces and
f : X -+Yand g : Y -+ X be maps such that gf ~ idX. Then g
54
is a left e-homotopy inverse of f and f is a right
e-homotopy inverse of g.
Theorem 5.9: Suppose X and Y are metric spaces. Then
a map f X - Y has a left E-homotopy inverse for every
E > 0 if and only if f is a homeomorphism, and for every
c > 0, idf(X) is E-homotopic in f(X) to a map extendable to
Y.
Proof: Let E > 0 be arbitrary. Suppose gE is a left
E-homotopy inverse of f. Then idXL~ gEf by a E-homotopy
f : X x [0,1] -4 X such that (6(x,O) = x , 6E(x,l) = gEf(x),
and for every t1 ,t2 c [0,1] and x e X d(6(x,t1 ),6(x,t2 )) < 6
In particular, for every x E X, d(6(x,0),6(x,1)) =
d(x,gEf(x)) < e.
Claim: The map f is one-to-one.
Let f(x1) = f(x2). By the hypothesis d(x,gEf(xl)) < E
and d(x2 )g f(x2 )) < E for every E > 0. Since f(xj) = f(x2)'
then d(x2 )gEf(x1)) < E. By the triangle inequality
d(xl,x2 ) < d(xl,g'f(x,)) + d(x2,g1f(xl)) < 2E for every
E > 0.
Just suppose x1 # x2 . Let d(x1 ,x2) =r > 0. Choose
c < r/2. Then 2E< r = d(x ,x2 ) < E. But this is a
contradiction. Therefore x 1 = x2 and f is one-to-one.
Clearly f is onto its image.
Claim: The map f is an open map.
Let U be an open subset in X and y0 be a member of
55
f(U). Let {yk- 4y0 be a sequence in f(X) which converges
to y0. To prove that f is an open map it is sufficient to
show that {yk} is eventually in f(U). Since f is
one-to-one, f~1 (yk) is a single member of X for every k, and
f 1 (y0) EU. Let E > 0 be chosen. Since f~1 (yk) E X, and
gE is a left e-homotopy inverse of f,
d(idX(fl(yk)),gcf(fl (yk))) = d(f- (yk),gE(yk)) ' E.
Similarly, d(f~ (y0 )gE(y 0)) < c. Since g6 is continuous,
g'(yk g(Yk)} is a sequence in X which converges to
g(y ). Thus there is a natural number NE such that Vn > NE
d(g'(yn),gE(y 0 )) < E. Therefore if n > NE
d(f~ (y0),f n(yn)) d(f-(yO),g'E(y0)) + d(g'(y0)g(Yn))
+ d(g(y nI n)) < 3E. Therefore the sequence {f- (yk)
converges to f-1 (y0) in X. Since f~ (y0) is in U which is
open in X, there is a natural number M such that Vm > M
f 1 (ym) is in U. So ff-(ym) = ym is in f(U). Therefore
{yk} is eventually in f(U), and f is an open map.
Therefore f is a homeomorphism.
Since gcf ~ idx and f is a homeomorphism, then
fgcff~l ~ fidXf'. But fidXf = ff-1 = idf(x) , and
fgEff1 = fgidf(X) = fg'f(). Thus fg|f() ~ idf(x) for
every E > 0. Clearly fgc|f() 9is a map that can be
continuously be extended to Y by fg*.
Conversely, suppose the map f : X - Y is a
homeomorphism and for every E > 0, idf(x )is E-homotopic to

56
a map extendable to Y. Since f is a homeomorphism, there is
no loss of generality to assume that X = f(X) or that X C Y
and that f = idX. For each E>0 let ge : Y -4X be the
extension of the map ge|f() which is e-homotopic to idX.
Thus glf(X) : f(X) -+ Y. But since f(X) = X,
gE f(X) X -+ X, and ge f()!~f idX. So for every c>0
there is a map (c : X x [0,1] -+ X such that (c(x,O) = x,
(x,1)=gc|f X (x), and for every x E X
d( '(x's1),66(xcs2)) < E for every s 1s2 in [0,1]. In
particular, d(x,gElf(X)(x)) < c. But since f = idX , for
all x c X f(x) = x. Thus (6(x,i) = gcf(x), and
d((x,sl),(xs2)) = d((f(x),s1),(f(x),s2 )) < E for all x E X.
Therefore idX ~E g!f, and gE is a e-homotopy inverse of f
for every E > 0.
Theorem 5.10: Suppose Y is a metric space and X is an
ANR. Then a map f X - Y has a left E-homotopy inverse for
every E > 0 if and only if f is a homeomorphism from X onto
f(X), and f(X) is a retract of Y.
Proof: Let X be an ANR and Y be a metric space.
Suppose a map f : X -+ Y has a e-homotopy inverse for every
E > 0. Since an ANR is a separable metric space, by
theorem 5.9, f is a homeomorphism and idf(x) is homotopic to
a map extendable to Y. Let 6 : Y -4 f(X) be an extension so
that idf(x ~I f(X). The set f(X) is closed in Y by the
57
same argument used in theorem 5.9 to show that f is an open
map. Also since f is a homeomorphism and X is an ANR, then
f(X) is an ANR. Then by the Borsuk-Dowker Theorem16 idf(x)
is also extendable to Y. Call this extension r; so r: Y
f(X) such that rlf(X) = idf(x). Therefore r is a retraction
and f(X) is a retract of Y.
Conversely, suppose the map f X - Y is a
homeomorphism onto f(X), and f(X) is a retract of Y. Then
there is a map r : Y - f(X) such that rlf(X) = idf(x). Then
clearly rlf(X) ~ idf(x )and r is an extension of rlfg) to
Y. Therefore by theorem 5.9, f has a left e-homotopy
inverse for every e > 0.
Theorem 5.11: Suppose that X and Y are metric spaces
and f X - Y such that Y + Cf is metrizable. The map f has
a right e-homotopy inverse for every E > 0 if and only if Y
is r7-deformable'into Cf-Y for every r > 0.
The term "ry-deformable" means that the deformation is a
it-homotopy. Recall that C, = {<x,t>I x e X, 0 ( t < 1}, and
<x,1> = <f(x)> for every x e X. Thus C-f=-Y
{<x,t>| x f X, 0 < t <1}.
Proof: Suppose f has a right e-homotopy inverse for
every E > 0, say gf. So for every E > 0, idy ~l fgE by a
homotopy ff : Y x [0,1] -4 Y where (f(y,0) = y, (f(y,1) =
'6Witold Hurewicz and Henry Wallman, Dimension Theory(Princeton: Princeton University Press, 1941), 86.

58
fgE(y), and dy(((y,s1 ),(((y,s 2 )) < c for every si, s2 in
[0,1]. For each e > 0 define 66E: Y x [0,1] -* Y + Cf by:
(<y>u)=ti66(y,2u) 0 < u ( 1/2
i(g6(y),1-e(2u-1)) 1/2< u 1
Thus 6E(<y>,0) = ij((y,0) = i(y) = <y>; so 6= id.
And 66(<y>,1) = i(g6(y),1-E) = <g(y),1-e> E Cf- Y, since
g9(y) e X and E > 0. When u = 1/2, 6(<y>,1/2) = i(6(y,1) =
i(fg'(y)) = <fg'(y)>, and 66(<y>,1/2) = i(gE(y),1-E(0)) =
i(g'(y),1) = <g'(y),1> = <fgE(y)>. Thus 66 is well defined
and continuous for every E > 0.
Since Y + Cf is metrizable, call its metric dc. Let dP
be the metric in Y + Cf x [0,1] defined by
dp ((<qj>,sj),(2>,s2)) = d c(<ci>,<c2 >)2 + di(sl,s2
where <q> represents any element of Y + Cf, and d is the
usual distance in the unit interval. Similarly, let dx be
the metric in X x [0,1], and dY be the metric in Y. Let
17 > 0 be chosen.
Case 1: Suppose u1 and u2 are in [0,1/2]. Now for
every E > 0, dp (66(<y>,u1 ),6(6(<y>,u2 )) =
d( (i((y,2uj),i(66(y,2u2)). Since i is continuous, if
dy((6(y,2u1 ),(6(y,2u 2 )) ( E, then
dp (i(6(y,2u1 ),i((6(y,2u 2 )) < V for every q > 0. So for the
chosen V choose an e > 0 such that
59
d P(561(<y>,u 1),5 1(<y>,U 2)) *
Case 2: Suppose u1 and u2 are in [1/2,1]. Then
d, (6 5 (<y>,u 1 ), 6 '(<y>,u2 )) =
dP(i(gE(y),1-c(2u1 -1)),i(g'(y),1-c(2u2-1)) for every E > 0.
Notice that 1/2 < u < 1 implies 0 < 2u-1 < 1 which implies
1-E < 1-E(2u-1) 1. Thus
dX ((g'(y) ,1-e(2u,-1)) ,(g6(y) ,1-e(2u2l)
0 + (d1 (1-e(2u1-1)),(1-E(2u2-1))) 2 = (2e(u2-u))2 =
2E Iu2-u11 for every E > 0. Again since i is continuous,
choose c2 > 0 such that 2E2Iu2-u1 I< 2E211-01 < n. Then
d (62(<y>,u 1)),6 f2 (<y>,u2)) I-
Case 3: Suppose u1 E [0,1/2] and u2 E [1/2,1]. Since,
when u = 1/2, i(y,) = i(g(y)), then
d, (6(<y>,u1),6'(<y>,u 2)) =
d P( i f(y,2u,) ,i(g6(y) ,1-e(2u2-1))) i d P( i 6(y,2u1) , i 6(y ,1))
+ d, (i(gE(y),1-e(2u2-1)),i(gE(y),1)) for every E > 0. Now
from case 1 and case 2, d P(i6 1 (y,2u1 ),i6 1 (y,1)) +
d (i(g2(y),1-E(2u2-1)),i( 2(y),1)) < 2. So choose c3 so
that dP(6(<y>,u 1 ),6E(<y>,u2)) < 2n/2.
Choose E < min {EE 2E 3 }. Then
d, (6E(<y>,u1 ),6'(<y>,u2 )) < n. Therefore for every 77 > 0, Y
is q-deformable into Cf-Y by 6f.
Conversely, suppose that Y is n -eformable into Cf-Y

60
for every n > 0. Then for every E > 0 there is a map
61 :Y x [0,1] -+ Y + Cf such that 6'(<y>,0) = <y>,
61(<y>,1) E Cf-Y, and d P(6c(<y>,u1) ,67(<y>,u2)) < < In
particular, dp(<y>,6n(<y>,1)) < 1. Let E > 0 be chosen.
Define v : Cf-Y -4 X by v(<x,t>) = x. Suppose U is an
open set in X. Then V-1(U) = i{(x,t)I x E U, t E [0,1)} =
U x [0,1) which is open in X x [0,1]. So v-1(U) is open in
Cf-Y and v is continuous.
Define g Y -+ X by g'(y) = v(6'(i(y),1)).
Notice that since 6c(<y>) e Cf-Y, then 6c(<y>) =<x,t>
for some <x,t> E Cf-Y. Also by the definition of v, every
<x,t> E Cf-Y is equal to <v(<x,t>),t>.
Define A : Cf-Y x [0,1] -+ Y + Cf by A(<x,t>,u) =
<x,t+u(1-t)>. Notice that A is defined similarly to -r in
lemma 4.8, = riC- y; so A is continuous.
Define ( :Y x [0,1] -+ Y by:
v = (<y>,2v) 0 < V 1/2
SA (6c(<y>) ,2v-1) 1/2 < v < 1
61
{<f V6 (<y>)>|<y> E} = {<fgE(i(x))> y E Y}
{<v(<x,t>),1>I <x,t> = 66(<y>), <y> e }
A
{<w(<x,t>),t>l <x,t> = 6(<y>), <y> E Y}
66(Y)
6
id
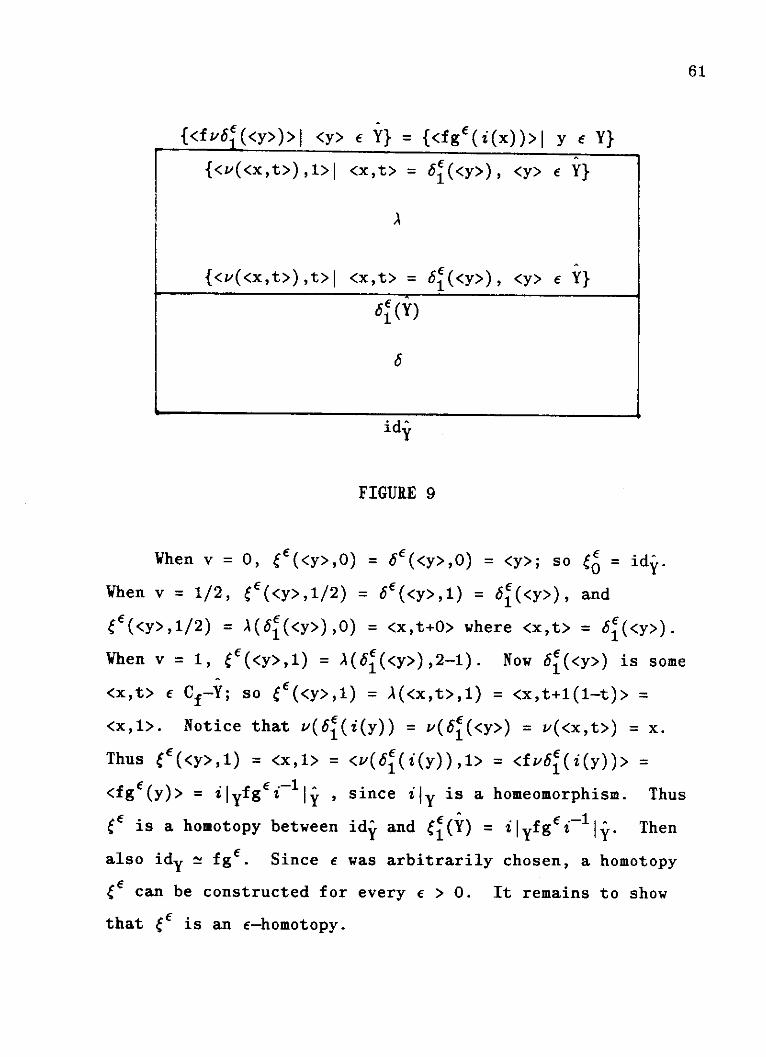
FIGURE 9
When v = 0, 6E(<y>,o) = 6E(<y>,o) = <y>; so = ide.
When v = 1/2, 66(<y>,1/2 ) = 6 (<y>,1) = 6(<y>), and
6 (<y>,1/ 2 ) = A(66(<y>),0) = <x,t+0> where <x,t> = 6(<y>).
When v = 1, ( (<y>,1) = A(66(<y>),2-1). Now 6(<y>) is some
<xt> E Cf-Y; so ((<y>,1) = A(<x,t>,1) = <x,t+1(1-t)> =
<x,i>. Notice that v(61(i(y)) = v(61(<y>) = v(<x,t>) = x.
Thus ((<y>,1) = <x,1> = <v(6(i(y)),1> = <fv6(i(y))> =
<fg6(y)> = ilyfgf i | , since ily is a homeomorphism. Thus
(E is a homotopy between id^ and ( (() = ilyfgi~11^. Then
also idy ~ fgE. Since E was arbitrarily chosen, a homotopy
C can be constructed for every e > 0. It remains to show
that 6E is an e-homotopy.
62
Case 1: Suppose vi and v2 are in [0,1/2]. Then
de 1 2)) = dc(6E((y> v)1(6E(<y>,'v2)) 'Case 2: Suppose v1 and v2 are in [1/2,1]. Then
de1 2)) = d1c(A61(y)v1),A6(y)v2))
Since A is continuous, for every 6 > 0 there is an 17 > 0
such that if dc(A67(1y>),vi),A(<y>),v<2)) <6, then
d1 112)d c~I(<>2v1 (6(<y>v2) < 77' So choose n such that
dc(A6q(<y>)v)'A6(<y>),v2)) ( 6.
Case 3: Suppose v. E [0,1/2] and v2 E [1/2,1]. Recall
that when v = 1/2, (e(<Y>,1/2) = 66(<y>,1) = A6(<y>),0).
Then d c(66(<Y>'vi) (<y>v2 )) dc(6(y>jvi),(<y>,1/2))
+ dc(66(<y>,1/2) ,((<y>,v2)) = d(6 6('y>,v 1),(6 C(<y>,l)) +
dc(Ab6(<y>),0),2A6(<y>),vj)). From case 2 there is an 17 > 0
such that d ( 2)) < e Choose n' such
that dc(6n (y>jv 1 ) ,(6 (<y>,1)) < e/2 and
dc(A6 (<y>),0),A67(<y>),vl)) < c/2. Then
dc(A6 (<Y>),v),A61( (<y>),v2)) C<. Choose 7 =
min {e,j,n'}. Then (7 is an e-homotopy.
Since i' I is a homeomorphism, by a similar argument
there is a 7' > 0 such that iY 7 / is an e-homotopy
between idy and fgC for any c > 0. 0
Theorem 5.12: Suppose X is a compact metric space; Y
is a metric space; and f : X -+ Y is a map such that Y + Cfis
metrizable. Then f has a two-sided e-homotopy inverse for
every e > 0 if and only if f is a homeomorphism of X into Y.
63
Proof: Suppose f has a two-sided e-homotopy inverse
for every e > 0.
Claim: The closure of f(X) is equal to Y.
Clearly T(XT C Y. Let y E Y. Let N be a basic open
neighborhood of y in Y. Then iN = ily(N) is an open
neighborhood of <y> in Y containing some basic open set G of
some radius, say p. By the previous theorem, Y is
E-deformable into Cf-Y; so for E = p there is a
6" : Y x [0,1] -+ Y + Cf such that 6(<y>,0) = <y>,
6P(<y>,1)fE Cf-Y, and dc(6P(<y>,s1 ),6P(<y>,s2)) < c. Since
6p(<y>) E Cf-Y, then 6P(<y>) is some <x,t> where t < 1. So
dc(<y>,<x,t>) < E. Since 6 is a homotopy, 6P : [0,1]-+(y>
Y + Cf is a path in Y + Cf from <y> to <x,t>. Furthermore,
the distance between any two points in this path is less
than p. Since 6P is continuous, there is some s e [0,1]
and some x' E X such that 6 y>(s) = <x',1> = <f(x')>, and
dc(<y>,<x',1>) < p. So <f(x')> E G. Now
f(x') E il~ (<f(x')>) g N; so f(x') E N. Therefore y is a
closure point of f(X), and I(X) = Y.
Since X is compact and f is continuous , f(X) is
compact. Since Y is a metric space, f(X) = TfXJ = Y. Then
idf(x) = idy; so idf(x) ~ idy for every E > 0. Then by
theorem 5.9, f is a homeomorphism from X onto Y.
Conversely, suppose f is a homeomorphism from X onto Y.
Then every y = f(x) for some x e X. Thus every <y> E Y can
64
be written as <f(x)> or <x,1>.
Let e > 0 be chosen. Define 6 Y: x [0,1] -+ Y + Cf by
6E(<ff(x)>,s) = <x,1-sE>. Thus 66(<ff(x)>,0) = <x,1-0> =
<x,1> = <f(x)>; so 6 = id'. When s = 1, 6E(<f(x)>,1) =
<x,1-E> E Cf-Y. Also dc(6E(<f(x)>,s1),6E(<f(x)>,s2)) =
dc6E(<x,1>,sl),6E(<x,1>,s2 )) dc(<x,1>,<x,1-e>) = 7 Thus
for every n > 0 Y is r-deformable into Cf-Y. Then by
theorem 5.11 f has a right E-homotopy inverse for every E >
0.
Since f is a homeomorphism from X onto Y, f(X) = Y and
idf(x) = idy; so by theorem 5.9, f has a left e-homotopy
inverse for every E > 0.
Let E > 0 be chosen, and let 16 be a left e-homotopy
inverse and rf be a right e-homotopy inverse of f. Define a
map ge = lfrE. Now fgE = flEfrE. Since l f ~, id x then
for some a > 0, flffrE is a-homotopic to fidXrE = frE.
Since fre ~, f idy , then flEfrE is a'-homotopic to idY for
some a' < 0.
Similarly, gf = lfrEf ~ lEidX =f'Ef idy. So
for p = min {7',a'} fgE ~ idX and g'f ~ idy. Therefore
gf is a two-sided p-homotopy inverse of f.
Then for every p > 0 there is some E > 0 such that ge
is a two-sided p-homotopy inverse of f. 0
REFERENCES
Borsuk, Karol. Theory of Retracts. Varsawa, Poland: PWN-Polish Scientific Publishers, 1967.
Fox, Ralph H. "A Characterization of Absolute NeighborhoodRetracts." Bulletin of the American MathematicalSociety. 48 (1942): 271-275.
. "On Homotopy Type and Deformation Retracts."Annals of Mathematics. (2) 44 (1943): 40-50.
Hurewicz, Withold and Henry Wallman. Dimension Theory.Princeton: Princeton University Press, 1941.
Willard, Stephen. General Topology. Reading, Massachusetts:Addison-Wesley Publishing Co., 1970.
65


















