Homing Missile Guidance and Control at JHU/APL SAE Aerospace Control & Guidance Systems Committee...
13
Homing Missile Guidance and Control at JHU/APL SAE Aerospace Control & Guidance Systems Committee Meeting #97 March 1-3, 2006 Uday J. Shankar, Ph. D. Air & Missile Defense Department 240-228-8037; [email protected]
-
Upload
kody-elliott -
Category
Documents
-
view
241 -
download
8
Transcript of Homing Missile Guidance and Control at JHU/APL SAE Aerospace Control & Guidance Systems Committee...

Homing Missile Guidance and Control at JHU/APLSAE Aerospace Control & Guidance
Systems Committee Meeting #97March 1-3, 2006
Uday J. Shankar, Ph. D.Air & Missile Defense Department
240-228-8037; [email protected]

UJS-SAE-030106
Unclassified
Abstract
This presentation discusses the GNC research at the Guidance, Navigation, and Control Group at the Johns Hopkins University Applied Physics Laboratory.
Johns Hopkins University Applied Physics Laboratory (JHU/APL) is one of five institutions at the Johns Hopkins University. APL is a not-for-profit research organization with about 3600 employees (68% scientists and engineers). Our annual revenue is on the order of $670m. The Air and Missile Defense Department is a major department of APL involved with the defense of naval and joint forces from attacking aircraft, cruise missiles, and ballistic missiles.
The major thrust of the GNC group is the guidance, navigation, and control of missiles. Our mission is to Integrate sensor data, airframe and propulsion capabilities to meet mission objectives. We are involved with GNC activities in the concept stage (design, requirements analysis, algorithm development), detailed design (hardware, software), and flight test (pre-flight predictions, post-flight analysis, failure investigation).
The Advanced Systems section within the GNC group is involved with several projects: boost-phase interception of ballistic missiles, discrimination-coupled guidance for midcourse intercepts, Standard Missile GNC engineering, Kill Vehicle engineering, integrated guidance control, swarm-on-swarm guidance, and rapid prototyping of GNC algorithms and hardware.
We discuss two examples. The first is the swarm-on-swarm guidance. This framework can be used to solve guidance problems associated with several missile defense scenarios. The second is the application of dynamic-game guidance solutions. This has applications in terminal guidance of a boost-phase interceptor and the discrimination-coupled guidance of terminal homing of a midcourse interceptor.
We discuss in more detail the problem of terminal guidance of a boost-phase interceptor. The problem is formulated and a closed-form solution is offered.

UJS-SAE-030106
Unclassified
Divisions ofThe Johns Hopkins University
School of Arts & SciencesWhiting School of EngineeringSchool of Professional Studies in Business & Education
School of Hygiene & Public HealthSchool of MedicineSchool of Nursing
Applied Physics Laboratory
Nitze School of Advanced International Studies
Peabody Institute

UJS-SAE-030106
Unclassified
Profile of theApplied Physics Laboratory
• Not-for-profit university research & development laboratory
• Division of the Johns Hopkins University founded in 1942
• On-site graduate engineering program in 8 degree fields
• Staffing: 3,600 employees (68% scientists & engineers)
• Annual revenue ~ $ 670M

UJS-SAE-030106
Unclassified
Air & Missile DefenseAdvancing Readiness & Effectiveness of US Military Forces
Key Programs:− Cooperative Engagement Capability
− Ballistic Missile Defense
− Standard Missile
− AEGIS
− Area Air Defense Commander
− Ship Self Defense
Critical Challenge 1: Defend naval & joint forces from opposing aircraft, cruise missiles, and ballistic missiles
Critical Challenge 2: Optimally deploy & employ multiple weapons systems to maximize defense of critical assets such as military forces, civilian population centers, airfields & ports in overseas theaters & in the United States

UJS-SAE-030106
Unclassified
• System concept trade studies• GNC requirements analyses• Algorithm research• Real-time distributed simulation
ConceptDevelopment
DetailedDesign
• Component modeling • 6 DOF development & verification• GNC algorithm development• Stability analysis• Flight control hardware testing • Evaluation of missile electrical systems• System performance analyses• Distributed simulation
GuidanceLaw
GuidanceLaw
OtherSensorsOther
Sensors
GPSGPS
Guidance &NavigationSolution
Guidance &NavigationSolution
Inertial Sensors
Missile
Seeker*Flight
ControlFlight
ControlAirframe/
Propulsion
MissileMotion
TargetMotion
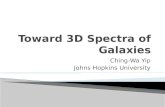
Homing Loop
Primary Responsibilities
Cooperative Efforts
* Primary responsibility for seeker dynamics and radome effects
Integrate Sensor Data, Airframe and Propulsion Capabilities to Meet Mission Objectives
• Intercept the Target• Maintain Stable Flight• Ensure Seeker Acquisition & Track• Minimize Noise and Disturbance Sensitivities
Integrate Sensor Data, Airframe and Propulsion Capabilities to Meet Mission Objectives
• Intercept the Target• Maintain Stable Flight• Ensure Seeker Acquisition & Track• Minimize Noise and Disturbance Sensitivities
Autopilot Loop
GNC Group: Roles
FlightTesting
• Hardware-in-the-loop• Preflight performance prediction• Post-flight evaluation• Failure Investigation

UJS-SAE-030106
Unclassified
GNC Group: Current EffortsStandard Missile
• SM-3 Development– INS/GPS analysis– Flight control improvements– 21” Standard Missile
• SM-6/Future Missile Studies– Inflight alignment– GNC studies
• Flight Test– 6 DOF replication– Failure investigation– Hardware fault insertion
Threat Launch Point
Predicted Intercept Point Uncertainty Basket
Radar Track
Terminal Homing• Optimize KV fuel usage• Satisfy hit requirements
Flyout Guidance• Fixed-interval guidance• Minimize KV handover errors
despite highly uncertain PIP
Intercept Point Prediction• Uncertain boost profile and
temporal events
Boost-Phase Intercept Studiesand GNC Algorithm Research RV, Booster, ACS,
Jammer, Decoys, …
Contain Likely RV Objects within
FOV
Maneuver to Keep Likely
Objects Within Divert
Capability
Discrimination-Coupled Guidance
Engager SwarmLethal footprint
Sensor / detector element
Asset
Sensor / detector element
TrackTrack
Designate Designate
Swarm-on-Swarm Guidance and Control Research
Expected benefit of employing cooperative missile swarms is increased performance robustness and mission flexibility
GuidanceFilter
GuidanceLaw
Autopilot
TargetSensors
Airframe /Propulsion
InertialNavigation
TargetMotion
MissileMotion
Integrated Guidance & Control (IGC)
via dynamic-game optimizationASCM
CG CVN
Mitigate Raid Attack Vulnerability via Cooperative Missiles
CVBG (Raid) Defense
G&C Real-timeImplementation
Remaining6-DOF
(real-time)
SensorSignals
Fin Commands
G&CAlgorithms
6-DOFAirframe, Sensor &
Environment Models
SensorSignals
Fin Commands
Analysis Simulation (not real-time)Rapid Prototype Testbed
Processor 1
Processor 2PC or UNIX processor
Rapid GNC Prototyping
• SM-3 Kill Vehicle- Flight test
performance assessment
- ACS design options- Advanced pintle 6
DOF, G&C design
KV G&C

Example GNC Research at APL

UJS-SAE-030106
Unclassified
Cooperative Multi-Interceptor Guidance
Threat Launch Point
Threat Trajectory
Uncertainty
Modified Aegis
Platform
Multi-KV for BPI
Manage Information Uncertainty via Increased Control Space
Swarm-Guidance: Expected Benefits
• Eased centralized control requirements- Remove “chokepoints, delays, etc.
• Reactive flexibility / adaptation to threats
• Scalability (response insensitive to #s)
• Near-simultaneous swarm negation- Minimize chaotic threat response to being engaged
- Rapid battle-damage assessment and 2nd-salvo response
Swarm-guidance: Guide multiple cooperative missile interceptors to negate one or more incoming threats (“Swarm-on-swarm”)
Sea-Surface Asymmetric Adversaries (S2A2)Mini-
Missiles
Speedboat Attacker SwarmShort time to ID & negate threat
Effect A Volume Kill Via Increased Control Space
ASCMCG
MaRV
CVN
Overhead Asset Mitigate Raid Attack Vulnerability via Cooperative Missiles
CVBG (Raid) Defense

UJS-SAE-030106
Unclassified
Ballistic Missile Defense Challenges
Threat Launch Point
Predicted Intercept Point Uncertainty Basket
Radar Track
Terminal Homing• Optimize KV fuel usage• Satisfy hit requirements
Flyout Guidance• Fixed-interval guidance• Minimize KV handover errors
despite highly uncertain PIP
Intercept Point Prediction• Uncertain boost profile and
temporal events
Notional Sea-Based Boost-Phase Intercept Scenario
Boost-Phase Intercept Challenges• Compressed timelines• Uncertain threat trajectory, acceleration,
staging events and burn-out times• Interceptor TVC has fixed maneuvering
time ending before intercept occurs• Kill vehicle fuel and g limitations
Information uncertainty coupled with time and kinematic limitations pose substantial challenges to ballistic missile defense
Predicted Intercept Point Uncertainty
Basket
Terminal Guidance • Contain likely objects within FOV• Volume / object commit• Maximize containment
Flyout Guidance • Cluster / volume commit• PIP refinement / IFTU• Energy / pulse management
Engageability / launch solution • Predicted intercept point (PIP)
Terminal Guidance - End Game• Aimpoint Selection• Satisfy Hit Requirements
Midcourse-Phase Intercept Challenges• Complex threat cluster(s) act to postpone
identification of the lethal object• Discrimination quality improves with time• Divert capability decreases with time• Guidance must generate acceleration
commands prior to localization of lethal object
Notional Midcourse-Phase Intercept Scenario

UJS-SAE-030106
Unclassified
Boost-Phase BMD: Terminal Homing
• Improve guidance law zero-effort-miss estimation accuracy− This improves KV V and g-efficiency
• Assume that the threat acceleration increases linearly− Improve on the APN concept versus a boosting threat
• Solve a dynamic-game (DG) optimization formulation− DG framework provides robustness to threat acceleration uncertainty− Couples the control components of the guidance problem to estimation and
prediction quality− Control is less sensitive to threat acceleration uncertainties
• Accommodating threat burnout− Employ a burnout detection cue (from the seeker)− Use in estimation and guidance algorithms
• Derive closed-form solutions− Prefer closed-form solutions to numerical solutions

UJS-SAE-030106
Unclassified
BPI Terminal Guidance SolutionBPI Terminal Guidance Solution
11 1 2
1 0 0
11 1 2 2 1
1
,
ˆ ˆ ˆ ˆ
T T Tk k k k k k k k k k k
T Tk k k k k k k k k k k k k k k k k k
P A P C R C Q A D D P P
x A x B u A P C R C Q Q x C R y C x
Dynamic Game Filter
EstimationUncertainty
12 ˆ( ) ( ) ( ) ( ) ( ) ( )Tt t t t t tu B Z I P Z x
Control Riccati Equation Solution
General structure of the control solution
2 22 2
( )0
min max 1: ( ) ( ) ( )
2 2( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( )Subject to:
( ) ( ) ( ) ( ) ( )
( )ft
f R t
bJ t t t dt
t t
t t t t t t t
t t t t t
r u wu w
x A x B u D w
y C x E w
Terminal Miss
Control UncertaintiesTerminal Miss
Performance Weight
2 31 12 6
2 4
3 3
2
2 2
3 ˆ ˆ ( )
( ) ( ) ( ) ( )3
31
( )
84
go T go T go
go g
g
T
go
o
o
t t t t t t tt
t t
bt
t t
r v a j
P
u
2 31 1
2 6ˆ 1i go go got t t
GuidanceLaw
RelativePosition
RelativeVelocity
ThreatAcceleration
ThreatJerk

UJS-SAE-030106
Unclassified
Thank You!








![A study of observability-enhanced guidance systems...t3] G.E" Hassoun and C.C. Lim, "Advanced Guidance Control System Design for Homing Missiles with Bearings-Only-Measurements", in](https://static.fdocuments.us/doc/165x107/6104adc392c0e1115810c427/a-study-of-observability-enhanced-guidance-systems-t3-ge-hassoun-and.jpg)