
Holistic Contingency Management for Autonomous Unmanned ... · PDF fileHolistic Contingency...
14
Holistic Contingency Management for Autonomous Unmanned Systems Jerry L. Franke, Adria Hughes, and Stephen M. Jameson Lockheed Martin Advanced Technology Laboratories {jfranke,ahughes,sjameson}@atl.lmco.com John G. Clark Lockheed Martin Advanced Development Programs [email protected] Robert J. Szczerba Lockheed Martin Systems Integration-Owego [email protected] Abstract Contingency Management—the problem of recognizing, assessing, and responding to unanticipated events or conditions that impact plan execution—is a key enabler for unmanned systems to become autonomous systems—that is, able to carry out assigned tasks or missions without continuous human supervision. We present a concept and technology for holistic contingency management that addresses all levels of autonomous system mission execution— from real-time flight-critical failures to long-term issues that can affect teams of vehicles. This concept features several key elements: • Multi-level assessment: Monitoring, assessment, and response occur at multiple levels. • Plan-based assessment: Monitoring is triggered by an assessment of dependencies and constraints on plan execution. • Capability-based assessment: Ongoing assessment of vehicle mission-related capabilities based on subsystem and environment status. • Predictive assessment: Monitoring and assessment of anticipated future events or conditions.
Transcript of Holistic Contingency Management for Autonomous Unmanned ... · PDF fileHolistic Contingency...
Holistic Contingency Management for AutonomousUnmanned Systems
Jerry L. Franke, Adria Hughes, and Stephen M. JamesonLockheed Martin Advanced Technology Laboratories
{jfranke,ahughes,sjameson}@atl.lmco.com
John G. ClarkLockheed Martin Advanced Development Programs
Robert J. SzczerbaLockheed Martin Systems Integration-Owego
Abstract
Contingency Management—the problem of recognizing, assessing, and responding to
unanticipated events or conditions that impact plan execution—is a key enabler for unmanned
systems to become autonomous systems—that is, able to carry out assigned tasks or missions
without continuous human supervision. We present a concept and technology for holistic
contingency management that addresses all levels of autonomous system mission execution—
from real-time flight-critical failures to long-term issues that can affect teams of vehicles. This
concept features several key elements:
• Multi-level assessment: Monitoring, assessment, and response occur at multiple levels.
• Plan-based assessment: Monitoring is triggered by an assessment of dependencies and
constraints on plan execution.
• Capability-based assessment: Ongoing assessment of vehicle mission-related capabilities based
on subsystem and environment status.
• Predictive assessment: Monitoring and assessment of anticipated future events or conditions.
• Team-based assessment: Assessment occurs not just of individual vehicles, but at the team
level as well.
We have implemented a holistic contingency management technology based on this concept
to manage detection and response to unexpected events in unmanned vehicle operations. We will
describe this Mission Effectiveness and Safety Assessment (MENSA) technology and its
application to a number of Department of Defense autonomous system programs.
Introduction
While removing the pilot from an unmanned vehicle provides numerous advantages
(including pilot safety, multiplication of force, and the automation of routine and dangerous
missions), the unmanned vehicle paradigm presents a significant challenge to the pilot’s
situational awareness needed for effective decision making. The dynamics of the battlespace
require rapid decision making using data about the state of the world surrounding the vehicle that
an unmanned vehicle pilot does not have direct access to. This property makes rapid response to
unexpected events during mission execution difficult without some aid to the pilot. The problem
is exacerbated in the case of autonomous vehicles, in which the system itself must respond to
problems.
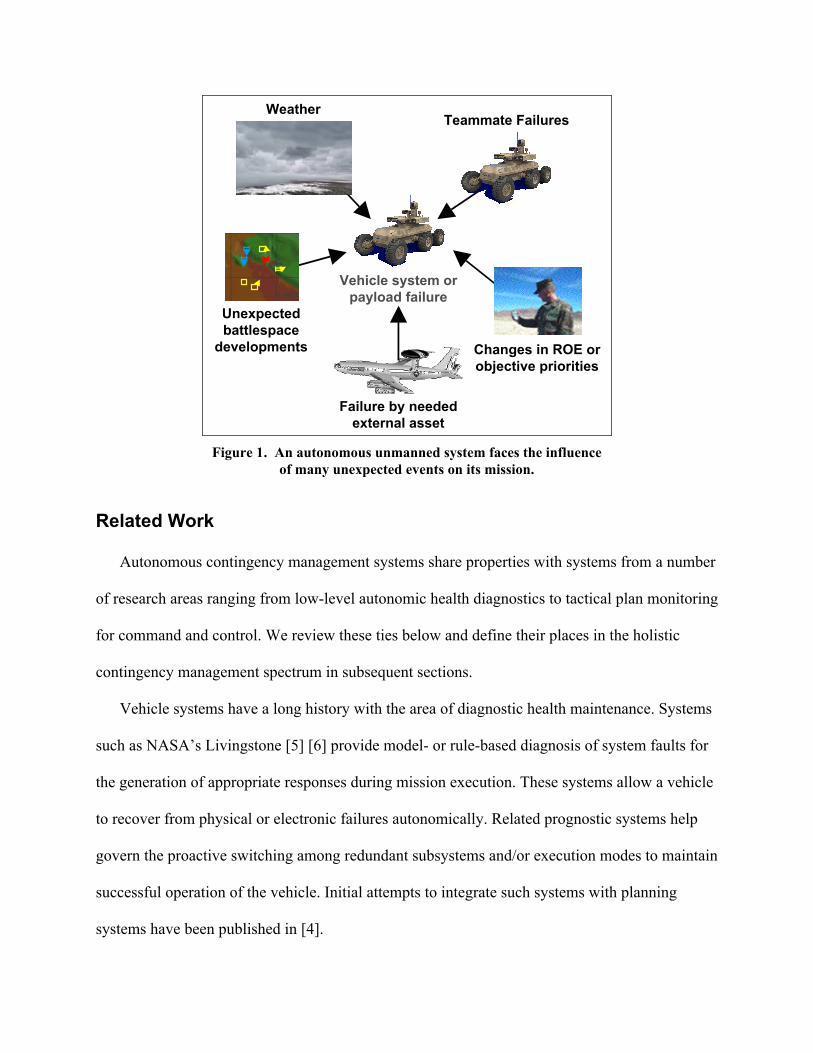
The sources of events affecting unmanned missions are many (see Figure 1). This requires a
high degree of flexibility on the part of the unmanned system to attain mission success. A robust
unmanned system must be capable of detecting an event, assessing the event’s impact on the
mission, planning a response to the system’s changed circumstances, and executing those
mission changes quickly and decisively. While significant research is being performed in the
planning and execution aspects of contingency management, we have specifically addressed the
contingency detection and assessment functions required to complete the overall decision cycle.
Weather
Failure by neededexternal asset
Vehicle system orpayload failure
Teammate Failures
Changes in ROE orobjective priorities
Unexpectedbattlespace
developments
Figure 1. An autonomous unmanned system faces the influenceof many unexpected events on its mission.
Related Work
Autonomous contingency management systems share properties with systems from a number
of research areas ranging from low-level autonomic health diagnostics to tactical plan monitoring
for command and control. We review these ties below and define their places in the holistic
contingency management spectrum in subsequent sections.
Vehicle systems have a long history with the area of diagnostic health maintenance. Systems
such as NASA’s Livingstone [5] [6] provide model- or rule-based diagnosis of system faults for
the generation of appropriate responses during mission execution. These systems allow a vehicle
to recover from physical or electronic failures autonomically. Related prognostic systems help
govern the proactive switching among redundant subsystems and/or execution modes to maintain
successful operation of the vehicle. Initial attempts to integrate such systems with planning
systems have been published in [4].

Reflexive response systems provide closed-loop response to specific sensor events, such as
detected obstacles or weapons radar lock-on. Due to the reaction times required for these types of
events, low-level mechanisms tend to be self-contained, specialized to the vehicle or subsystems
involved, and operate independently of the unmanned system’s plans.
Contingency planning systems attempt to identify specific events that may occur in the future
and plan alternate routes or courses of action to respond to those events [3]. Typically, these
contingencies take the form of decision points in the plan at which multiple branches may be
taken. This provides well-established, pre-determined responses to predictable events during the
course of mission execution. The dynamic contingency management functions described in this
paper provide a means through which contingency planning systems can be supplemented with
systems that have the capability to trigger response to those planned contingencies in addition to
unexpected events as well.
Similar technologies have been explored in planning domains outside the world of unmanned
system control. For example, Lockheed Martin’s Air Campaign Monitor provides a means for
assessing the severity of anomalies in the expected state of the battlespace with respect to air
operations plans [1]. These operations plan execution monitoring systems are designed to help
commanders make decisions about contingencies at an operations level. Operations plan
execution monitoring systems operate on a larger time granularity than unmanned system
mission execution, thus exist above the level of functional scope for autonomous system
contingency management. However, such systems might use autonomous contingency
management systems as one source of observables for their plan assessment functions.

Holistic Contingency Management
To enable fast, effective response to the full spectrum of unexpected events an unmanned
system may face, we consider a holistic approach that provides for monitoring and assessment at
many levels of granularity, both in system complexity and in time (see Figure 2). This approach
matches the current trend in hierarchical planners, which provide planning functions at multiple
levels of scope.
Figure 2. A holistic view of contingency management assessesmission success across a broad array of causes and timelines.
At the lowest levels of the contingency management spectrum are the autonomic health
maintenance and closed-loop control mechanisms that provide rapid response to immediate
problems during vehicle operation. These functions cover contingencies such as obstacle
avoidance, switching among redundant subsystems, turbulence compensation, and fire response.
In developing our contingency management approach, we’ve added further levels to the
hierarchy. The first set of functions to be developed involved assessing the operating context of
an unmanned system with respect to the system’s mission plans. Contingencies detected and
assessed at this level include changes in vehicle operational capabilities due to changes in system
health, tactical response to pop-up threats through avoidance or opportunistic targeting,
adjustment of plans to account for changes in the weather or to meet new rules of engagement, or
replanning due to changes in objectives.
By extending mission-level contingency management temporally, the unmanned system can
acquire the ability to look ahead and respond proactively to likely upcoming problems. A threat
may not immediately affect a plan, but given its expected movement, will it cause a problem
later in the plan? While a sensor’s degraded capabilities may still be sufficient for the unmanned
system’s tasking, do health prognostics predict a continuing degradation or potential loss of
function by the sensor? The ability to do predictive assessment of potential contingencies is a
powerful tool for achieving mission success even in the most dynamic environments.
Because multi-system, collaborative operations are being explored in many current programs,
it is important to consider contingency management at a team level as well as at the individual
system level. Team operations introduce new types of problems that must be detected and
handled. If the team mission plan contains tasks that are collaborative (e.g., one system
designating a target for another system to prosecute), how do modifications or delays in one
system’s plan affect the other system? If one system’s needed sensor fails, can another member
of the team take on that system’s tasking? How does the current communications environment
impact the team’s coordinated plans? Assessment of events and conditions such as these provide
a bridge between contingency management for a single system and high-level mission execution
monitoring systems.

Implications on Planning Systems
The introduction of holistic contingency management into unmanned systems suggests a
variety of design criteria to autonomous planning systems. Plans generated by the system should
include information about the factors considered in forming the plan, including hard constraints
on objective timelines, acceptable tactical risk, and resource use. In addition, the planner should
accept the dynamic introduction of new constraints or modifications to existing constraints as
mission execution yields events that modify both the vehicle and battlespace state.
One example of such a planning system is Lockheed Martin’s TeamWorks™ multi-vehicle
planning system (see Figure 3). TeamWorks™ planning provides task allocation for teams of
multiple heterogeneous vehicles and autonomous unmanned missions with a variety of mission
objective types. Based on numerous mission variables (e.g., fuel, fuel burn rate, available
weapons/sensors, weather, threats, etc.), the system generates routes for each vehicle in a team to
produce the optimal overall team plan. New events, such as pop-up threats and new objectives,
can be added to the constraint mix dynamically to allow the system to generate a plan cost
analysis to determine how the team should best handle the new event. To support the dynamic
replanning aspect of its operation, TeamWorks™ planning interacts with Lockheed Martin’s
contingency management system, described in the next section.
Figure 3. TeamWorks™ is one example of an autonomous planning systemthat can support dynamic response to contingencies at the mission level.

Implementing Contingency Management
To provide a standard means for inserting the capabilities necessary to apply our holistic
contingency management approach to varied unmanned systems, we developed the Mission
Effectiveness and Safety Assessment (MENSA) architecture (see Figure 4). MENSA provides
the necessary monitoring and assessment functions required for detecting and responding to
unexpected events during unmanned missions. MENSA is constructed to interoperate with a
variety of autonomous planning systems in a number of different domains via a set of clear,
standard interfaces. Because of this design choice, MENSA can also be used directly as a
decision aid for unmanned system operators.
Pop-upThreat
CM Administrator
InputProcessing
Alerting
PlanDependency
Analysis
PlanImpact
Analysis
Replan alerts
Plans, status,environment data,
commands
Monitors Assessors
Monitor, assessor tasking
Contingency identification
Contingency detection
OrdersChange
Targetof Opp.
SensorHealthComms
Health
WeaponsHealth
VehicleHealth
ROECompliance
MissionSafety
StrikeCapability Sensor
Capability
FlightCapability
TacticalEffectiveness
MonitoringManager
AssessmentManager
Figure 4. Our Mission Effectiveness and Safety Assessment (MENSA) architectureprovides scalable contingency management functions for autonomous systems.
Its scalable architecture makes MENSA highly flexible and broadly applicable. MENSA’s
monitoring and assessment functions are encapsulated by agents that are specialized to each
contingency type. These agents are activated through XML workflows, providing a means to
quickly reconfigure MENSA dynamically during runtime. This agent-based design makes adding
new functions or contingency types to the system simple and straightforward.
By embodying the holistic contingency management approach, MENSA operates at multiple
levels of the unmanned system organizational hierarchy. At the vehicle level, MENSA performs
monitoring and assessment functions in relation to a single system’s capabilities and mission. At
the team level, MENSA performs monitoring and assessment functions in relation to a
collaborating team of systems’ capabilities and mission.
MENSA analyzes incoming mission plans to identify the capabilities of the system required
for mission success along with other key plan dependencies, such as avoiding pop-up threats and
following no-fly zone parameters. Having identified these dependencies, MENSA determines the
elements of the vehicle’s subsystems and environment it should monitor for status changes.
While the system conducts its mission, MENSA continually monitors and evaluates both system
state and battlespace conditions to detect changes that may affect mission success. Similar
monitoring is performed for teams of systems.
If a change is detected in one of the elements being monitored, MENSA assesses the event to
determine if platform capabilities or battlespace environment has changed in a way that would
affect the current mission. If the plan would be affected, MENSA produces a replan alert so that
an autonomous planning system (or the operator) can replan around the new variables introduced
into the system’s operation.
MENSA is designed to support real-world operations, which sometimes require exceptions to
normal mission procedures and tactics to attain mission success. For example, while a vehicle
typically should avoid exposing itself to a threat, some critical targets might require such
exposure to successfully prosecute. For those exceptional cases, we have provided an override
mechanism to MENSA that allows an operator to instruct the system to suppress replanning
related to one or more specific contingencies. By using the contingency override mechanism, the
operator can better control the balance between vehicle safety and mission success at critical
points in the mission plan.
Because MENSA performs an overall assessment of a system’s operational capabilities as
part of its functions, MENSA can also report the health state of the system. The health state
contains details of the system’s operational capabilities (such as maximum speed, remaining
endurance, etc.) in addition to individual subsystem health status. MENSA’s assessment of
operational capabilities mimics the reasoning an unmanned system’s operator performs when
making decisions during planning. MENSA performs the same assessment functions for
aggregations of capabilities at the team level.
Integration with Mission Management Architectures
The MENSA contingency management capability is a key component of overall unmanned
system mission management architectures, tightly integrated with an avionics system. The
following section outlines a representative dynamic mission management architecture to provide
a context for the MENSA component. The architecture, known as the KineForce™ Mission
Management Architecture, was developed by Lockheed Martin for the dynamic mission planning
and execution of heterogeneous manned and unmanned vehicle teams [2]. The system is
segmented into seven major components (see Figure 5) that each impact the contingency
management process:
• Contingency management: Detects, assesses, and responds to unexpected events.
• Mission planning: Develops plans and replans for the team and for individual vehicles.
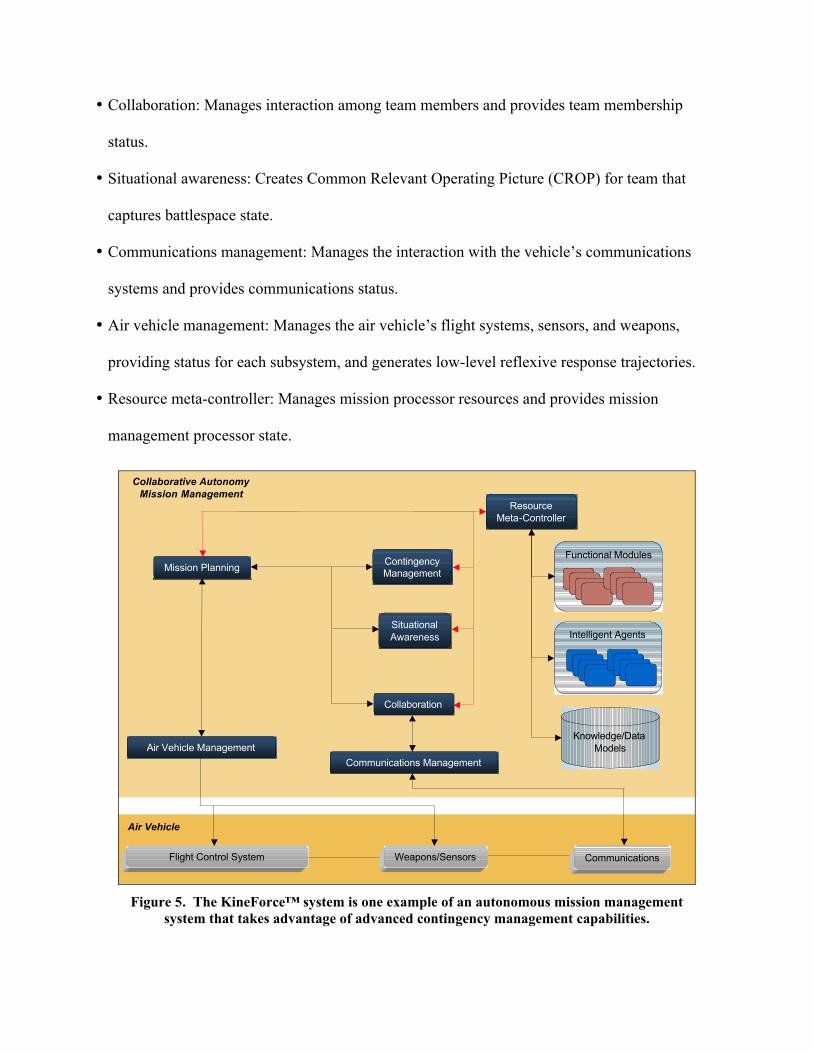
• Collaboration: Manages interaction among team members and provides team membership
status.
• Situational awareness: Creates Common Relevant Operating Picture (CROP) for team that
captures battlespace state.
• Communications management: Manages the interaction with the vehicle’s communications
systems and provides communications status.
• Air vehicle management: Manages the air vehicle’s flight systems, sensors, and weapons,
providing status for each subsystem, and generates low-level reflexive response trajectories.
• Resource meta-controller: Manages mission processor resources and provides mission
management processor state.
DARRS025..ppt
Air Vehicle
Collaboration
Mission Planning
Situational Awareness
Contingency Management
Communications
Functional Modules
Intelligent Agents
Knowledge/DataModels
Resource Meta-Controller
Weapons/Sensors
Air Vehicle Management
Flight Control System
Collaborative AutonomyMission Management
Communications Management
Figure 5. The KineForce™ system is one example of an autonomous mission managementsystem that takes advantage of advanced contingency management capabilities.
As a part of this architecture, MENSA implements contingency monitoring and plan impact
analysis for mission events such as air vehicle flight capability degradation, pop-up threats and
targets of opportunity, friendly and neutral movement within the battlespace, loss of team
members, and mission equipment failures. MENSA can also determine when an emergency
mission abort is required and provides the system’s operator with control over the level/type of
contingency monitoring performed. MENSA analyzes mission plans and information regarding
the changing situation (e.g., new objectives, new constraints, new obstacles, new threats, new
targets, and changes in vehicle/team capabilities), issuing alerts when plans will no longer satisfy
objectives and constraints.
At the team level, MENSA receives alerts of contingencies that cannot be handled at a
vehicle level and issues replan alerts to team mission planning components to redistribute tasking
among the team. This supports a team-wide contingency resolution escalation process where
reaction to unplanned events that affect the execution of the vehicle system’s mission (see Figure
6). In addition, MENSA performs team-level capability assessment, aggregating mission
capability information from all team members into a definition of total system mission
capabilities.
MENSA, as part of the KineForce™ mission management architecture, has been used to
demonstrate advanced autonomy concepts for multi-asset teamed operations in simulation. In
addition, in 2005, the system provided contingency management services to Lockheed Martin
test-flights of teamed SilverFox UAVs. MENSA triggered replans of the system’s search
objectives in response to team membership changes over the course of the mission and provided
system capability assessment to the mission operator.
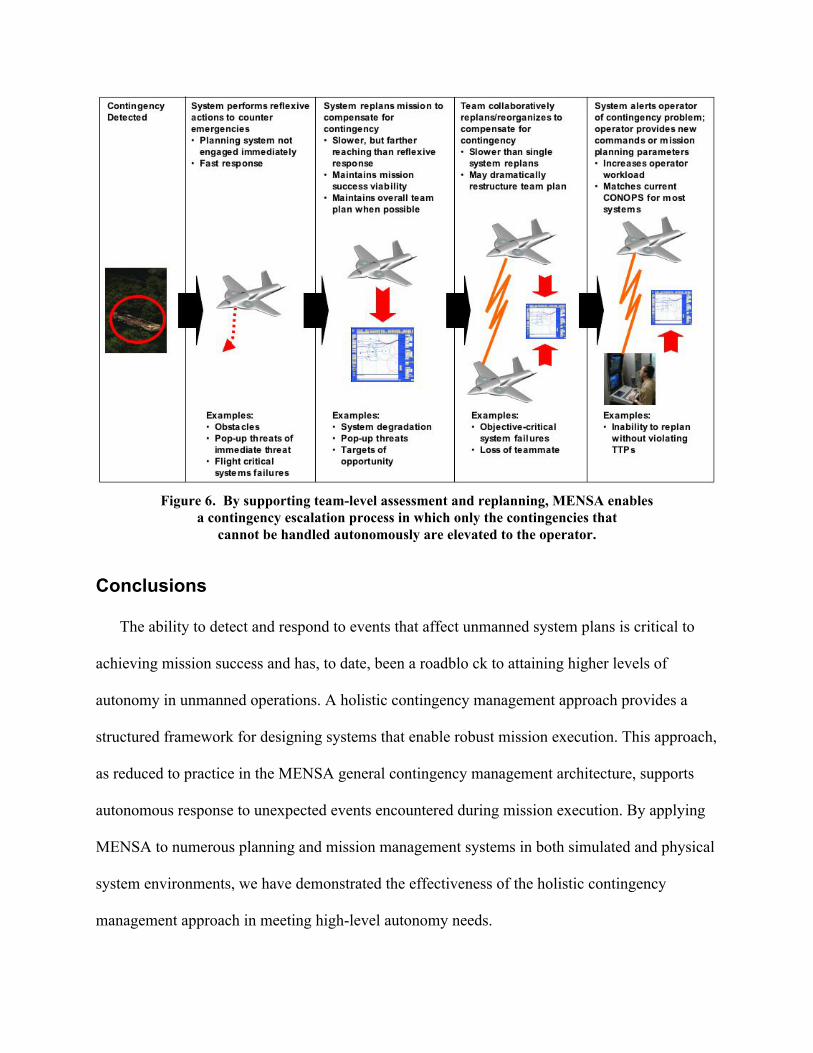
Figure 6. By supporting team-level assessment and replanning, MENSA enablesa contingency escalation process in which only the contingencies that
cannot be handled autonomously are elevated to the operator.
Conclusions
The ability to detect and respond to events that affect unmanned system plans is critical to
achieving mission success and has, to date, been a roadblo ck to attaining higher levels of
autonomy in unmanned operations. A holistic contingency management approach provides a
structured framework for designing systems that enable robust mission execution. This approach,
as reduced to practice in the MENSA general contingency management architecture, supports
autonomous response to unexpected events encountered during mission execution. By applying
MENSA to numerous planning and mission management systems in both simulated and physical
system environments, we have demonstrated the effectiveness of the holistic contingency
management approach in meeting high-level autonomy needs.
References
[1] Allen, James P. and McCormick, John M., “Adaptive Plan Monitoring Systems for MilitaryDecision Support,” Proceedings of the 2005 AAAI Spring Symposium, 2005.
[2] Jameson, Steve, et al., “Collaborative Autonomy for Manned/Unmanned Teams,”Proceedings of the American Helicopter Society 61th Annual Forum, 2005.
[3] Linden, Theodore A. and Glicksman, Jay, “Contingency Planning for an Autonomous LandVehicle,” International Joint Conference on Artificial Intelligence, 1987.
[4] Reichard, Karl M. and Crow, Eddie C., “Intelligent Self-Situational Awareness forUnmanned and Robotic Platforms,” Proceedings of AUVSI Unmanned Systems NorthAmerica 2005, 2005.
[5] Schwabacher, Mark, et al., “The NASA Integrated Vehicle Health Management technologyexperiment for X-37,” Proceedings of the SPIE AeroSense 2002 Symposium, 2002.
[6] Williams, Brian C. and Nayak, P. Pandurang, “A model-based approach to reactive self-configuring systems,” Proceedings of the Thirteenth National Conference on ArtificialIntelligence, 1996.


















