
Hoangtt Chaos Complete

of 53
-
Upload
thanh-hoang -
Category
Documents
-
view
214 -
download
0
description
High School Thesis for Thanh Hoang at ASMSA
Transcript of Hoangtt Chaos Complete
-
Chaos with a Damped Driven Pendulum i
Chaos with a Damped Driven Pendulum
Thanh Hoang
Fundamentals in Research Methods
Dr. Brian Monson
March 31, 2011
-
Chaos with a Damped Driven Pendulum 1
CHAOS WITH A DAMPED DRIVEN PENDULUM
Introduction
Chaos can be found in a wide range of scientific and mathematical studies.
Mathematicians have tried to quantify it, while physicists often simply ignore it. James Gleick
appropriately stated in his book Chaos, Where chaos begins, classical science stops. As it is,
chaos has been called the centurys third great revolution in the physical science.
Prior to chaos theory, the main principle of mechanics was the Laplacian principle of
deterministic predictability (Gleick, 1988, p. 6). According to this principle, the behavior of a
system can be approximated if the initial conditions are known and the laws of physics are
applied properly. Slight changes in the initial conditions will lead to only slight changes in the
behavior. This occurs because the stable behavior in a system does not disappear due to the
smallest alterations of conditions (p. 47). Chaos exhibits many characteristics that overturn this
assumption. One such characteristic is chaos ability to show that tiny errors are able to
propagate, grow, and can lead to dramatic changes in the behavior in some systems (Stewart,
2002, p. 21).
Paradoxically, chaos theory emphasizes that similar things are not always the same. Any
chain of events has a point of crisis that magnifies small changes. Chaos revealed that there
could be instability at every point. Meaning in chaos, these crisis points can be anywhere
(Gleick, 1988, p. 23). To understand the essence of chaos is to understand that there is a delicate
balance between stability and instability at every scale. Simple, deterministic systems can
become complex and systems exhibiting behaviors too complex for traditional math could obey
simple laws.
-
Chaos with a Damped Driven Pendulum 2
Chaos did not originate from a specific field of study. From astronomy to biology to
meteorology, disciplines are yielding results that displayed the unusual behavior of chaos. One
of the first scholars to recognize this behavior was Henri Poincar, a topologist who viewed
dynamical systems as two sides of one coin (p. 46). Dynamical systems are those that change
continuously over time, such as the motion of planets or chemical reactions (Devaney, 1989).
The purpose of observing dynamical systems is to predict the outcome. The outcome sought is
the final state of beingstability (Gleick, 1988, p. 138). As Poincar studied topology, he was
aware of the hints of unpredictability that could be seen. However, his findings on dynamical
systems were not highly regarded due to the rising popularity of topology (p. 46).
Later on, chaos began making appearances in other research papers such as the papers by
Robert May, a biologist. He studied what would happen if the rate of growth of a population
passed the critical point (p. 70). He developed a model that today is called the logistic map
xnext = r x ( 1 x )) (The Period Doubling Route to Chaos, n.d.). When the growth rate, r, is
raised, the degree of nonlinearity is increased. Parameters are fixed values based on set
conditions that the dynamics of natural processes depend on, and vary from instance to instance
(Scott, 2005). Nonlinear equations are used to model parameters. Therefore, when May
increased the degree of nonlinearity to mathematically model the growth of a population and
prey relations, the stability of the equation decreased and the population would oscillate between
two or more values instead of reaching equilibrium. Therefore, the critical value was altered to
become instable or chaotic (Scott, 2005). With this information, May was able to observe period
doubling using the logistic equation to create a bifurcation diagram.
Period doubling is the most common of several routes to chaos. It is the response of a
system at half the driving frequency, due to non-linear coupling (Scott, 2005). The logistic
-
Chaos with a Damped Driven Pendulum 3
equation used by May demonstrates how simple systems can produce nonlinear and
nondeterministic outcomes (The Period Doubling Route to Chaos, n.d.). While a low r produces
a steady state, a high r produces a system that demonstrates a sensitive dependence on the initial
conditions with outcomes that vary greatly with minor changes in the parameter. A bifurcation
diagram is used to assemble all the information about all calculations for varying parameters into
a single diagram (The Period Doubling Route to Chaos, n.d.). In such a diagram, the calculated
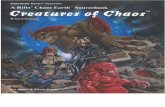
data starts off as a line that steadily increases. As the parameter increases, the line doubles or
bifurcates. This means the system alternates between two fixed points, or attractors, instead of
one. The doubling for each line becomes more frequent until chaos suddenly appears, as shown
in Figure-1.
Figure-1: A bifurcation diagram is used to assemble all the information about all calculations for
varying parameters into a single diagram. The population increases until the possibility of the
populations value splits into two fixed values. The splitting continues until chaos is reached,
where there isnt a fixed value because all values are possible.
-
Chaos with a Damped Driven Pendulum 4
This period doubling behavior can be observed in physical systems, such a double
pendulum as well in mathematical models. A double pendulum is typically made up of two
physical pendulums joined. The movements made by a double pendulum can be plotted by a
phase space, such as the velocity and position. A phase space is a graph in which any state of a
system at any moment in time is represented as a point in the plot (p. 49). In a phase space of a
pendulum, it is a plot of angular velocity versus angular position. It extracts essential
information from a system of moving parts, mechanical or fluid, and makes a flexible chart of all
physical possibilities (p.134). In a double pendulum, a phase space can be used to show the
mingled regions of periodicity and chaos. From a phase space graph, a Poincar map, or return
map, can be plotted. This is accomplished by plotting the momentum and position once each
period of the driving force instead of at all times. Another pendulum that can be used is a
damped driven pendulum, which can produce chaos through varying driving frequencies, driving
amplitudes, and damping amplitudes.
Chaos has a wide range of applications and is therefore relevant in the general education
curriculum. The limited amount of experimentation and focus on mathematical models instead
of physical models is a cause for concern. There have been projects to present first time
experimental bifurcation diagrams theoretically (Besnard, Ginovart, Le Boudec, Sanchez, &
Stphan, 2002, p. 187). However, few studies have been done to present chaos experimentally.
The goal of this project is to create a physical demonstration of chaotic motion using variable
external forces on a damped driven pendulum in order to replicate a bifurcation graph for
educational purposes.
-
Chaos with a Damped Driven Pendulum 5
Procedures
A damped driven pendulum was constructed with the use of Pasco equipment. Two
120cm rods were set in an A-stand, and connected to a 45cm cross rod at the top with two right
angle-clamps. A rotary motion sensor was fastened onto the cross rod facing the inside of the A-
stand for more stability. A mechanical oscillator was mounted at the base of the first vertical rod
to supply a periodic driving force to the pendulum. A photogate head was screwed to the
mechanic oscillator to measure the frequency of the driving force. A level was used to adjust the
rods to ensure they were plumb. A 1.5m string was cut and the center was tied around the
smallest step of the rotary motion sensor pulley. Both ends of the string were threaded through
the side hole of the largest step. One end of string is wrapped twice around the largest step of the
rotary motion sensor clockwise, while the other end was wrapped counterclockwise twice.
With the driver arm of the mechanical oscillator positioned vertically downward, another
piece of string was cut and tied to it. The string was tied to the driver arm so that when the
driver arm was in motion, the string would not tangle around the driver arm. After the string was
threaded through the string guide at the top of the mechanical oscillator, Spring A, the spring of
the left side, was fastened to the string coming from the string guide. The string hanging from
the left side of the rotary sensor was tied to Spring A. One end of a string, around 10 cm, was
connected to the right base of the A-stand and the other end was attached to second spring,
Spring B. The right string hanging from the rotary sensor was tied to Spring B. The rotary
motion sensors disk was secured to the system. With that step, the pendulum system was
completed, as shown in Figure-3. The rotary motion sensor and photogate cables were
connected to a ScienceWorkshop 750 Interface.
-
Chaos with a Damped Driven Pendulum 6
Figure-3: The spring on the left side was defined as Spring A, and the one of the right as Spring
B. The rotary motion sensor is located on the top on a cross rod that connects two long vertical
rods together. The rod seen in the picture holds the mechanical oscillator, driving arm, and
photogate.
First, data was collected to determine the natural frequency of the pendulum system. The
rotary motion sensor was used to record the angular velocity and angular position in rad/s and
rad, respectively. The photogate sensor was used to record the period of the driving arm. Data
was collected by displacing the point mass from equilibrium, and was recorded onto a phase
space using the software DataStudio with a Dell desktop computer. The sampling rate for the
rotary sensor was set at 20Hz. The point mass was displaced from equilibrium before the data
-
Chaos with a Damped Driven Pendulum 7
was collected. After recording data for 10s, a Fast Fourier Transform (FFT) was used to display
the frequency found using angular position. The maximum point on the graph was used to
determine the natural frequency of the pendulum.
A DataStudio template was used for the experiment. Under the option Setup, two
instruments were added: a rotary motion sensor and photogate. For the rotary motion sensor,
angular position was measured in degrees and angular velocity was measured in rad/s. The
resolution of the sensor was set to 1440 bits/revolution. The photogate was used to measure the
period of the driver arm. Under Sampling Options, an automatic stop at 180s was created.
A graph display was created on the side for the phase plot to be created by plotting angular
velocity versus angular position. A timer was set up so that it recorded a value (T) for every time
the photogate sensor was blocked once in order to record a full period. These values were used to
calculate a frequency using the Calculate function. The Calculate function was used to create
an x and v variable as well. X, measured in degrees, was equal to T*0+y (where y was angular
position), and v, measured in rad/s, was equal to T*0+x (where x was angular velocity). A
Poincar plot display was made by plotting v versus x.
A magnetic damper acting as a damping force on the pendulum was attached, and
adjusted until it was 0.5 cm from the disk. The driver arm was set at 4cm. The frequency was set
to approximately 0.25 Hz. Then data was collected 10 times with the frequency increased for
each trial until natural frequency was obtained. Poincar plots and phase spaces were created for
each trial.
The magnetic damper was twisted to its farthest extent from the disk. Under the
experiment setup for data sampling, the data was recorded for three min. The mechanical
oscillator was set to 6.5V which produced a driving frequency of 1.17Hz (0.02Hz), the
-
Chaos with a Damped Driven Pendulum 8
resonance frequency of the system. The amplitude of the driving arm was set at 5.5 cm. The
mechanical oscillator was turned before the start of the data collection. The point mass was held
still at the highest position. The start button was pressed and the point mass was released from
rest when the driver arm was at the lowest point. After each trial, the damper screw was adjusted
one fourth of a turn towards the disk, and the process repeated. This was executed thirty times.
As the trials were recorded, Poincar and phase plots for each trial were created using the
template.
The FFT could not be running while collecting data, nor could data be superimposed on
the FFT display. Therefore, the FFT was used to determine the frequencies of each run after all
data had been collected. The Smart Tool on DataStudio was used to determine the value of the
frequencies for each angular position FFT displayed. Peaks, with a y-value with a height at least
twice the size of the background noise, were recorded for each trial. The number of peaks
corresponded with the number of periods in the trial. These frequencies were plot against the
parameter to create a bifurcation graph using Excel.
-
Chaos with a Damped Driven Pendulum 9
Data
Figure-4 shows the FFT display for the freely oscillating pendulum. It shows that the
resonant frequency of the system was 1.171875 Hz.
Figure-4: The natural frequency of the pendulum is 1.171875Hz.
-
Chaos with a Damped Driven Pendulum 10
In the set executed with a varying frequency, Figures-5 through -10 show visual
examples of the trials run. Figures-5, -7, and -9 are phase plots of the trials, and Figures-6, -8,
and -10 are the Poincar plots. The rest of the graphs can be found in Appendix A.
Figure-5: The phase space for a frequency of 0.643Hz, when the driving arm was set at 4cm and
magnetic damper was set at 0.5cm from the disk, shows a period of one.
Figure-5 shows phase space of the fifth trial run. In this trial, the frequency was 0.643Hz.
The trial was determined to have one period because there is only one path. The graph shows a
-
Chaos with a Damped Driven Pendulum 11
single path which means there is only one period at that frequency. Figure-6 shows the Poincar
plot for the trial. The plot also shows that there was a period of one by the single cluster of
points.
Figure-6: The Poincar plot for a frequency of 0.643Hz, when the driving arm was set at 4cm
and magnetic damper was set at 0.5cm from the disk, shows a period of one.
-
Chaos with a Damped Driven Pendulum 12
Figure-7: The phase space for a frequency of 0.838Hz, when the driving arm was set at 4cm and
magnetic damper was set at 0.5cm from the disk, shows chaotic motion.
Figure-7 shows the seventh trial run. In this trial, the frequency was 0.838 Hz. As shown
in the phase space, the trial was determined to demonstrate chaos because the pendulum
oscillated around two attractors, but did not settle into any pattern. Figure-8 shows the Poincar
plot for the trial. The lack of clusters shown in the graph, also illustrates that there were not any
periods recorded for that frequency.
-
Chaos with a Damped Driven Pendulum 13
Figure-8: The Poincar plot for a frequency of 0.838Hz, when the driving arm was set at 4cm
and magnetic damper was set at 0.5cm from the disk, shows chaotic motion.
-
Chaos with a Damped Driven Pendulum 14
Figure-9: The phase space for a frequency of 1.174Hz, when the driving arm was set at 4cm and
magnetic damper was set at 0.5cm from the disk, shows a period of one.
Figure-9 shows the ninth trial run. In this trial, the frequency was 1.174 Hz (close to
natural frequency). As shown in the phase plot, the trial was determined to have one period
because there was a single ring. Figure-10 shows the phase plot for the trial. The one cluster of
points illustrated in the display, shows that there is only one period at that frequency.
-
Chaos with a Damped Driven Pendulum 15
Figure-10: The Poincar plot for a frequency of 1.174Hz, when the driving arm was set at 4cm
and magnetic damper was set at 0.5cm from the disk, shows a period of one.
-
Chaos with a Damped Driven Pendulum 16
In the set executed with a varying magnetic damping magnitude, Figures-11 through -16
show visual examples of the trials run. The complete set is located in Appendix A. Figures-11, -
13, and -15 are the phase spaces of the trials, and Figures-12, -14, and -16 are the Poincar plots.
Figure-17 shows the bifurcation graph created for the trials. The complete set of graphs can be
found in Appendix B.
Figure-11: The phase space shows chaotic motion for parameters the following parameters: one
fourth of a turn on the magnetic damper, driving amplitude of 5.5cm, and driving frequency of
1.17Hz.
-
Chaos with a Damped Driven Pendulum 17
Figure-11 shows the phase phase graphed for the second trial run where the magnetic
damper was screwed one fourth of a turn towards the disk. As shown in the graph, the trial was
determined to demonstrate chaos because there was a lack of pattern shown in the graph. The
phase plot also shows that the potential well on the right side of the pendulum was deeper.
Figure-12 shows the Poincar plot for the trial. Since there are not any clusters, it also illustrates
that there were not any periods recorded.
Figure-12: The Poincar plot shows chaotic motion for parameters the following parameters:
one fourth of a turn on the magnetic damper, driving amplitude of 5.5cm, and driving frequency
of 1.17Hz.
-
Chaos with a Damped Driven Pendulum 18
Figure-13: The phase space shows a period of five for parameters the following parameters: two
and a fourth turns on the magnetic damper, driving amplitude of 5.5cm, and driving frequency of
1.17Hz.
In Figure-13, the phase phase shows a period of five was recorded when the magnetic
damper was two and a fourth turns in towards the disk. Three of the periods are easily seen in
the graph on the left. However, the other two periods are distorted from the tradition elliptical
pattern as seen on the right. Figure-14 displays this in a Poincar plot.
-
Chaos with a Damped Driven Pendulum 19
Figure-14: The Poincar plot shows a period of five for parameters the following parameters:
two and a fourth turns on the magnetic damper, driving amplitude of 5.5cm, and driving
frequency of 1.17Hz.
-
Chaos with a Damped Driven Pendulum 20
Figure-15: The phase space shows a period of one for parameters the following parameters:
seven and a fourth turns on the magnetic damper, driving amplitude of 5.5cm, and driving
frequency of 1.17Hz.
In Figure-15, the phase space was created for the trial that had the magnetic damper
turned seven and a fourth turns out toward the disk. The phase space shows signs of chaos but
settles to a period of one. Figure-16 displays this in a Poincar plot.
-
Chaos with a Damped Driven Pendulum 21
Figure-16: The Poincar plot shows a period of one for parameters the following parameters:
seven and a fourth turns on the magnetic damper, driving amplitude of 5.5cm, and driving
frequency of 1.17Hz.
-
Chaos with a Damped Driven Pendulum 22
Figure-17: The bifurcation graph shows the frequencies of a pendulums route to chaos when
the damping was varied while the driving amplitude was kept constant at 5.5cm, and driving
frequency at 1.17Hz.
The bifurcation graph of the varying magnetic damping magnitude is shown in Figure-17.
The frequency was plotted against the number of turns the magnetic damper was rotated towards
the disk. The complete set of FFT displays used to determine the values for the bifurcation
diagram can be seen in Appendix C. The horizontal axis was reversed in order to show the
pendulums route from stability to chaos. Each symbol represents the frequency of the period.
The vertical bars represent chaos. When the damper was 7.25 and 7.0 turns in, the behavior
showed fixed frequencies at approximately 1.17Hz and 2.34Hz. The system bifurcated and had
six periods. Then, after 0.75 turns, the system returned to periods of two. This was followed by
0
0.5
1
1.5
2
2.5
3
012345678
Freq
uen
cy(H
z)
Magnetic Damping (turns inward)
Varying Magnetic Damping Bifurcation Graph
0
0.25
0.5
0.75
1
1.25
1.5
1.75
2
2.25
2.5
2.75
3
3.25
-
Chaos with a Damped Driven Pendulum 23
a series of period of nine. Then the system oscillated between even periods of two four and six,
until odd periods and chaos was reached.
-
Chaos with a Damped Driven Pendulum 24
Discussion
Chaos was sought using a damped driven pendulum with variation in amplitude
frequency and magnetic damping magnitude. Using these two variables, chaos was found in the
midst of a stable system. First, chaos was shown to appear in the midst of stability during the
trials run with varying frequencies. At low frequencies, the system was stable. As the frequency
was increased, chaos was observed. However, as the frequency increased, the system became
stable again. Then, a route to chaos was made using varying magnetic damping amplitudes,
chaos did not appear in the trials run as expected; the period did not double into chaos. Instead,
the trials fluctuated from even periods of two, four, and six; odd periods of nine; and chaos. This
was different from the anticipated period doubling from one to two to four until chaos was found
with the sporadic odd numbered periods.
Chaos was found by varying the amplitude frequency and magnetic damping amplitude.
However, it was concluded that the system was too sensitive to exhibit period doubling in a
controllable manner. The system observed was different than the classical steady period
doubling route to chaos, which goes from a stable period of one to two, four, and more until
chaos was reached. The sensitivity to the variations in the equipment greatly affected the results,
which supports the belief that the outcome of a chaotic system is highly dependent on the initial
conditions, as well as the environment of the system.
There are many difficulties involved in working with chaos because it is so sensitive to
initial conditions. A source of error is the instability of the environment. The stand was not
perfectly rigid which would have caused a bias in the results. Another problem occurred with
the pendulums string. After the driving amplitude become too large, the string would come off
the disk. Also, although the knot on the string tied to Spring A was secure, tension from the
-
Chaos with a Damped Driven Pendulum 25
pendulums motion and jerking from the string coming off the disk caused the point masss
equilibrium to deviate from the center. This needed to be constantly readjusted. A circumstance
that could have caused bias to the results was the unevenness of the stand. Despite leveling, the
pendulum was slightly tilted. In addition, measuring the length the driving arm needed to be
adjusted was imprecise because the increments were small. It was difficult to precisely move the
driving arm in increments of 0.5 mm. Often, the driving arm would come unscrewed. If not
checked, the driving arm could come off and interrupt data collecting, which would cause an
error in the results due to inconsistency. Another error was the nonequivalent potential wells in
the pendulum. Since the strings kept coming off the pendulum, the value of the potential wells
kept changing. This was why if the strings came off, a set of data could not be continued. Also,
since one potential well was deeper than the other, the results could have been skewed.
In the future, to correct these sources of error, the pendulums strings should be measured
more precisely, and the potential wells of the pendulum checked for every trial. In addition, a
more stable stand should be used, and the pendulum should not be handled at all. In the future,
these observations can be applied to other fields of study, similar to how ecology has already
adapted the use of chaos.
-
Chaos with a Damped Driven Pendulum 26
References
Besnard, P., Ginovart, F., Le Boudec, P., Sanchez, F., & Stphan, G.M. (2002, April 15).
Experimental and theoretical study of bifurcation diagrams of a dual-wavelength erbium-
doped fiber laser. Optics Communications, 205, 187-195. France: Elsevier Science B.V.
Devaney, R.L. (Writer). (1989). Chaos, Fractals, and Dynamics: Computer Experiments in
Mathematics [Television Series Episode]. In Science Television. New York: The Science
Television Company.
Gleick, J. (1988, April). Chaos: Making a New Science. New York: Viking Penguin Group.
The Period Doubling Route to Chaos. (n.d.). Retrieved March 6, 2010, from James Madison
University, Harrisonburg, Virginia: http://csmres.jmu.edu/geollab/Ficher/GeoBio350/x-
next.pdf
Scott, Alwyn. (2005). Period Doubling. Encyclopedia of Nonlinear Science. Routledge.
Stewart, I. (2002, March). Does God Play with Dice?: The New Mathematics of Chaos (2nd ed).
Wiley-Blackwell.
-
Chaos with a Damped Driven Pendulum 27
Appendix A
Driver arm4cm; Magnetic damper0.5cm
Run #1: 0.536Hz
Run #2: 0.255Hz
-
Chaos with a Damped Driven Pendulum 28
Run #3: 0.342Hz
Run #4: 0.459Hz
-
Chaos with a Damped Driven Pendulum 29
Run #5: 0.643Hz
Run #6: 0.729Hz
-
Chaos with a Damped Driven Pendulum 30
Run #7: 0.838Hz
Run #8: 0.934Hz
-
Chaos with a Damped Driven Pendulum 31
Run #9: 1.174Hz
Run #10: 1.039 Hz
-
Chaos with a Damped Driven Pendulum 32
Appendix B
Driving arm5.5cm; Frequency1.17Hz
Run #1: farthest from disk
Run #2: turn toward disk
-
Chaos with a Damped Driven Pendulum 33
Run #3: turn toward disk
Run #4: turn toward disk
-
Chaos with a Damped Driven Pendulum 34
Run #5: 1 turn toward disk
Run #6: 1 turns toward disk
-
Chaos with a Damped Driven Pendulum 35
Run #7: 1 turns toward disk
Run #8: 1 turns toward disk
-
Chaos with a Damped Driven Pendulum 36
Run #9: 2 turns toward disk
Run #10: 2 turns toward disk
-
Chaos with a Damped Driven Pendulum 37
Run #11: 2 turns toward disk
Run #12: 2 turns toward disk
-
Chaos with a Damped Driven Pendulum 38
Run #13: 3 turns toward disk
Run #14: 3 turns toward disk
-
Chaos with a Damped Driven Pendulum 39
Run #15: 3 turns toward disk
Run #16: 3 turns toward disk
-
Chaos with a Damped Driven Pendulum 40
Run #17: 4 turns toward disk
Run #18: 4 turns toward disk
-
Chaos with a Damped Driven Pendulum 41
Run #19: 4 turns toward disk
Run #20: 4 turns toward disk
-
Chaos with a Damped Driven Pendulum 42
Run #21: 5 turns toward disk
Run #22: 5 turns toward disk
-
Chaos with a Damped Driven Pendulum 43
Run #23: 5 turns toward disk
Run #24: 5 turns toward disk
-
Chaos with a Damped Driven Pendulum 44
Run #25: 6 turns toward disk
Run #26: 6 turns toward disk
-
Chaos with a Damped Driven Pendulum 45
Run #27: 6 turns toward disk
Run #28: 6 turns toward disk
-
Chaos with a Damped Driven Pendulum 46
Run #29: 7 turns toward disk
Run #30: 7 turns toward disk
-
Chaos with a Damped Driven Pendulum 47
Appendix C
Fast Fourier Transform graphs for the trials set with the following parameters:
Driving arm5.5cm; Frequency1.17Hz
Run #1: farthest from disk
Run #2: turn toward disk
Run #3: turn toward disk
Run #4: turn toward disk
-
Chaos with a Damped Driven Pendulum 48
Run #5: 1 turn toward disk
Run #6: 1 turns toward disk
Run #7: 1 turns toward disk
Run #8: 1 turns toward disk
Run #9: 2 turns toward disk
Run #10: 2 turns toward disk
-
Chaos with a Damped Driven Pendulum 49
Run #11: 2 turns toward disk
Run #12: 2 turns toward disk
Run #13: 3 turns toward disk
Run #14: 3 turns toward disk
Run #15: 3 turns toward disk
Run #16: 3 turns toward disk
-
Chaos with a Damped Driven Pendulum 50
Run #17: 4 turns toward disk
Run #18: 4 turns toward disk
Run #19: 4 turns toward disk
Run #20: 4 turns toward disk
Run #21: 5 turns toward disk
Run #22: 5 turns toward disk
-
Chaos with a Damped Driven Pendulum 51
Run #23: 5 turns toward disk
Run #24: 5 turns toward disk
Run #25: 6 turns toward disk
Run #26: 6 turns toward disk
Run #27: 6 turns toward disk
Run #28: 6 turns toward disk
-
Chaos with a Damped Driven Pendulum 52
Run #29: 7 turns toward disk
Run #30: 7 turns toward disk














![Complete Hard Disk Encryption with FreeBSD · 22nd Chaos Communication Congress Complete Hard Disk Encryption with FreeBSD Marc Schiesser m.schiesser [at] quantentunnel.de December](https://static.fdocuments.us/doc/165x107/5d49645788c993b53d8bb12f/complete-hard-disk-encryption-with-freebsd-22nd-chaos-communication-congress.jpg)
