High Speed PIV Report
21
Identification of Trailing-Edge-Noise at Buffet Flows Using High-Speed PIV and Preparation of Pipe Flow Through a 90 Degree Bend PIV Investigation ME 491: Independent Study Charles Ferriera July 27, 2012
-
Upload
charles-ferriera -
Category
Documents
-
view
235 -
download
1
Transcript of High Speed PIV Report
Identification of Trailing-Edge-Noise at
Buffet Flows Using High-Speed PIV and
Preparation of Pipe Flow Through a 90
Degree Bend PIV Investigation
ME 491: Independent Study
Charles Ferriera
July 27, 2012
1
Table of Contents
1. Introduction of Projects ...........................................................................................................2
Pipe flow through a 90 degree bend
Introduction/Abstract……………………………………………………………………………...3
2. Lab observations and procedure
2.1 Methods ..........................................................................................................................3
2.2 Results/Conclusions ........................................................................................................4
Identification of trailing-edge-noise at buffet flows using high-speed PIV
3. Introduciton/Abstract…………………………………………………………………………...7
4. Lab observations and procedure
4.1 Methods ..........................................................................................................................9
4.2 Results/Discussion……………………………………………………………………….15
5. Summary and Conclusions .................................................................................................... 19
6. References............................................................................................................................. 20

2
Introduction of Projects
The projects for this independent study were both created and executed at RWTH Aachen
University under the supervision of Axel Hartmann and Franka Schröder. Both supervisors had
unique projects in which both myself and Evan McCune participated in. Schröder’s project was
focused on the fluid flow through a 90 degree pipe and Hartmann’s project was focused on
locating the cause of trailing-edge-noise at buffet flow using high-speed PIV. I chose to focus on
Hartmann's project for the majority of my time at RWTH. First, a brief summary of Particle Image
Velocimetry (PIV) will be given followed by a summary of my learning experience and
contributions to the inspection of fluid flow through a 90 degree pipe. Then my primary project
(Identification of Trailing-Edge-Noise at Buffet Flows Using High-Speed PIV) with Axel will be
discussed in detail.
Particle Image Velocimetry
The experimental procedure used to conduct the two projects was Particle Image Velocimetry
(PIV), which is a method of flow measurement that gives the user the ability to measure the
velocity field of a fluid flow. The primary equipment used in the experimental setup generally
consists of lasers, cameras, a fluid flow, and tracer particles. The fluid flow is measured by
pulsing 2 sheets of laser light in fast intervals, which illuminates tiny tracer particles within the
fluid flow. Fast cameras are used to photograph the flow exposed to the laser pulses. The cameras
are calibrated using a calibration grid of a known measurement interval in order to find the
displacement between particles captured at separate times. Since the laser pulse delay is known,
it is therefore possible to find the particle velocities. The images are analyzed via PIV computer
software using methods of cross correlation to find a distinct magnitude and direction of the fluid
flow.
Some different methods of PIV include holographic, volume tomographic, high-speed time
resolved, micro and multi-plane stereoscopic. The methods of PIV used for the experiments were
mono, high-speed time resolved and stereoscopic. Mono PIV captures images of a fluid flow
using a single camera. High speed time resolved PIV involves using high-speed lasers and
fastcams to illuminate particles and capture images of highly unsteady fluid flows. Stereoscopic
PIV consists of a laser, 2 cameras at equivalent oblique angles relative to a laser sheet and a seeded
fluid flow. This method is based off of the same principle as the human eyes, which is why it is
given the name “Stereo PIV.” An important advantage of Stereo PIV is its ability to capture all 3
velocity vector components.
3
Pipe flow through a 90 degree bend
Introduction /Abstract
In order to use computer simulations of fluid flow through a 90 degree bent pipe, validation of the
fluid flow's characteristics must be accomplished. A mono PIV setup with a single camera and
two lasers were used to capture images of the fluid flow. The lasers created a light sheet, which
illuminated tracer particles while the camera captured images of the incoming flow. The
incoming flow generally displayed dual vortices known as Dean Vortices. Using VidPIV
computer software, it was possible to analyze the images and find the magnitude and direction of
the fluid flow.
Methods
Before gathering data, it was necessary to establish a reference image so that a Matlab program
could accurately count the number of particles contained within the image. This was done via
Cam Wave computer software and trial and error, where both the grey scale and particle density
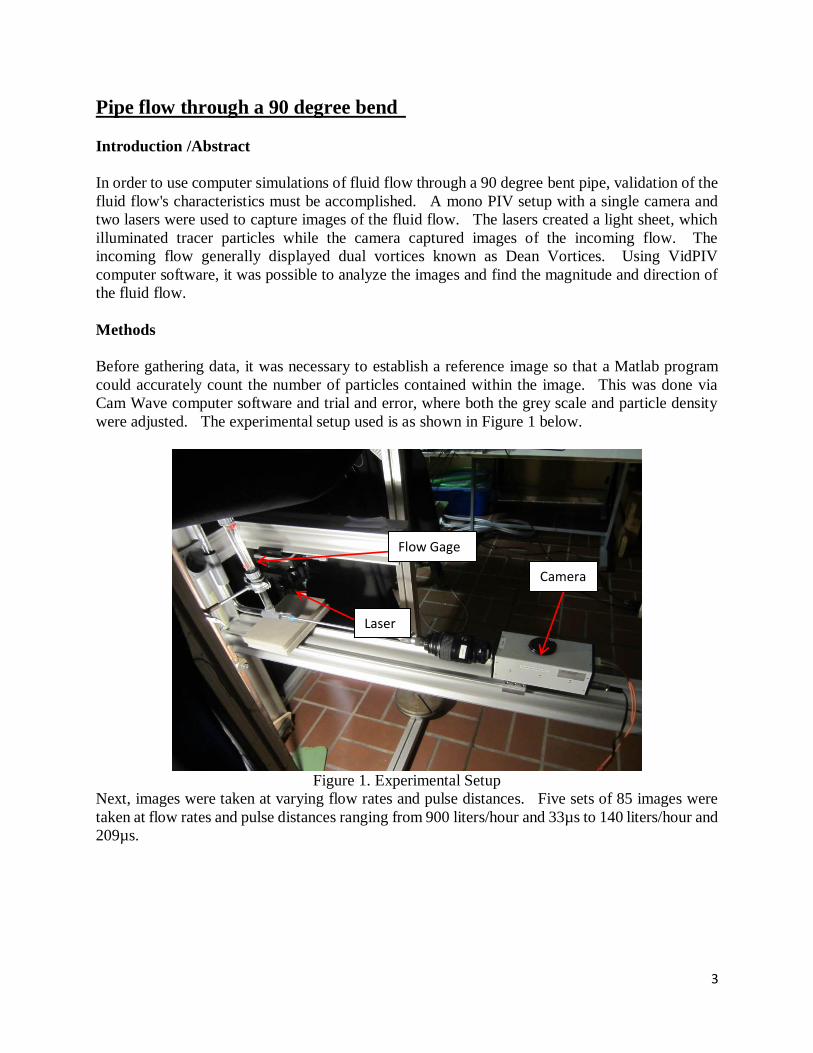
were adjusted. The experimental setup used is as shown in Figure 1 below.
Figure 1. Experimental Setup
Next, images were taken at varying flow rates and pulse distances. Five sets of 85 images were
taken at flow rates and pulse distances ranging from 900 liters/hour and 33µs to 140 liters/hour and
209µs.
Camera
Flow Gage
Laser
4
General Procedure
1. Turn on lasers 1 and 2
2. Turn on synchronizer
3. Add seeding
4. Record 85 images via Cam Wave
5. Stop recording
6. Save and Repeat 1-5 at a new flow rate and pulse width
The images were then processed by Evan McCune using VidPIV computer software.
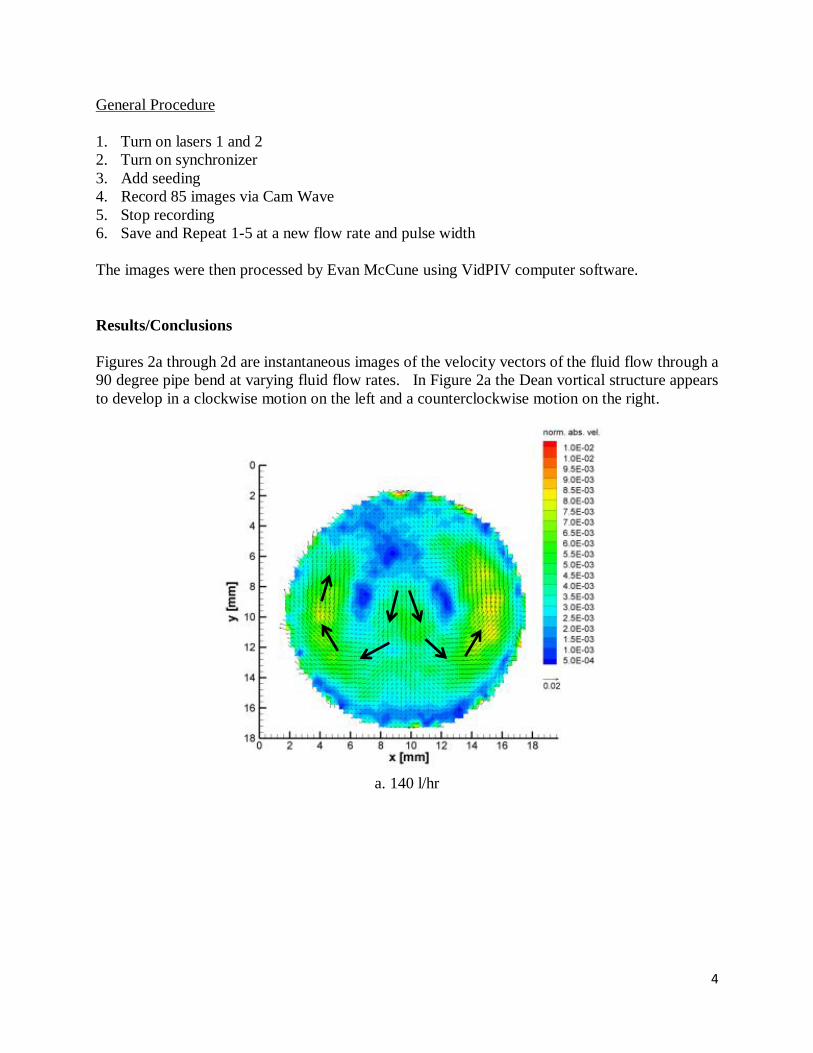
Results/Conclusions
Figures 2a through 2d are instantaneous images of the velocity vectors of the fluid flow through a
90 degree pipe bend at varying fluid flow rates. In Figure 2a the Dean vortical structure appears
to develop in a clockwise motion on the left and a counterclockwise motion on the right.
a. 140 l/hr
5
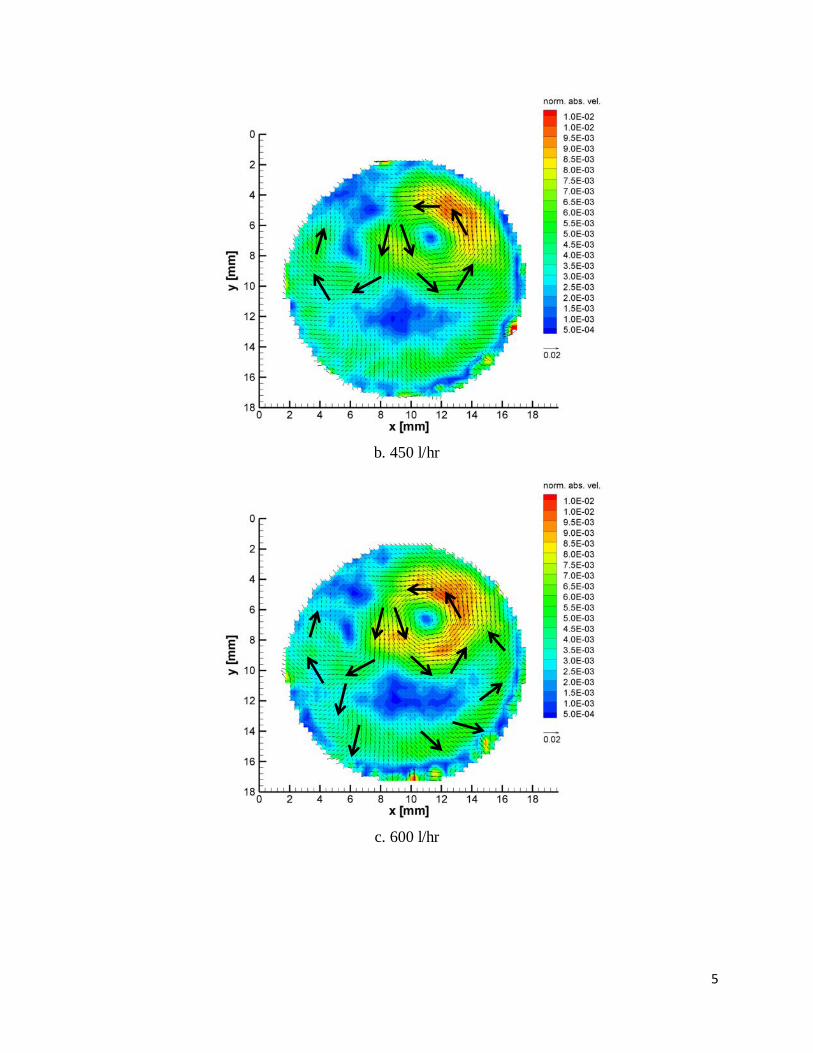
b. 450 l/hr
c. 600 l/hr
6
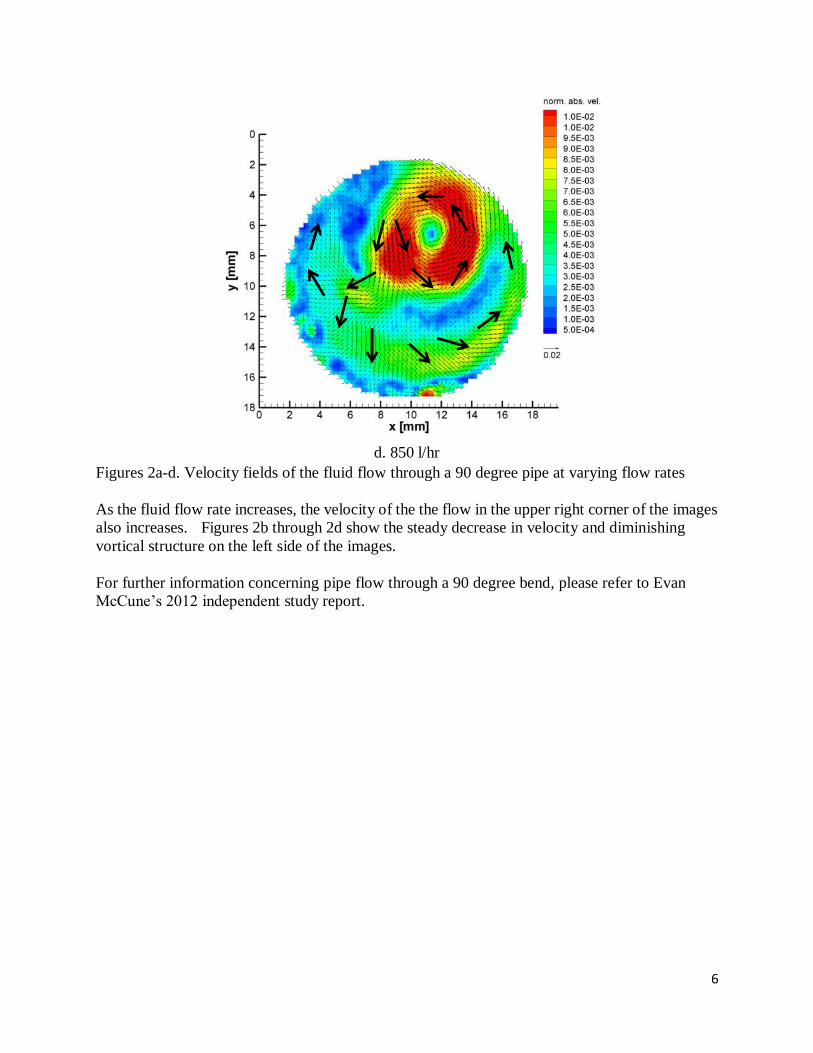
d. 850 l/hr
Figures 2a-d. Velocity fields of the fluid flow through a 90 degree pipe at varying flow rates
As the fluid flow rate increases, the velocity of the the flow in the upper right corner of the images
also increases. Figures 2b through 2d show the steady decrease in velocity and diminishing
vortical structure on the left side of the images.
For further information concerning pipe flow through a 90 degree bend, please refer to Evan
McCune’s 2012 independent study report.
7
Identification of trailing-edge-noise at buffet flows using high-speed PIV
Introduction/Abstract
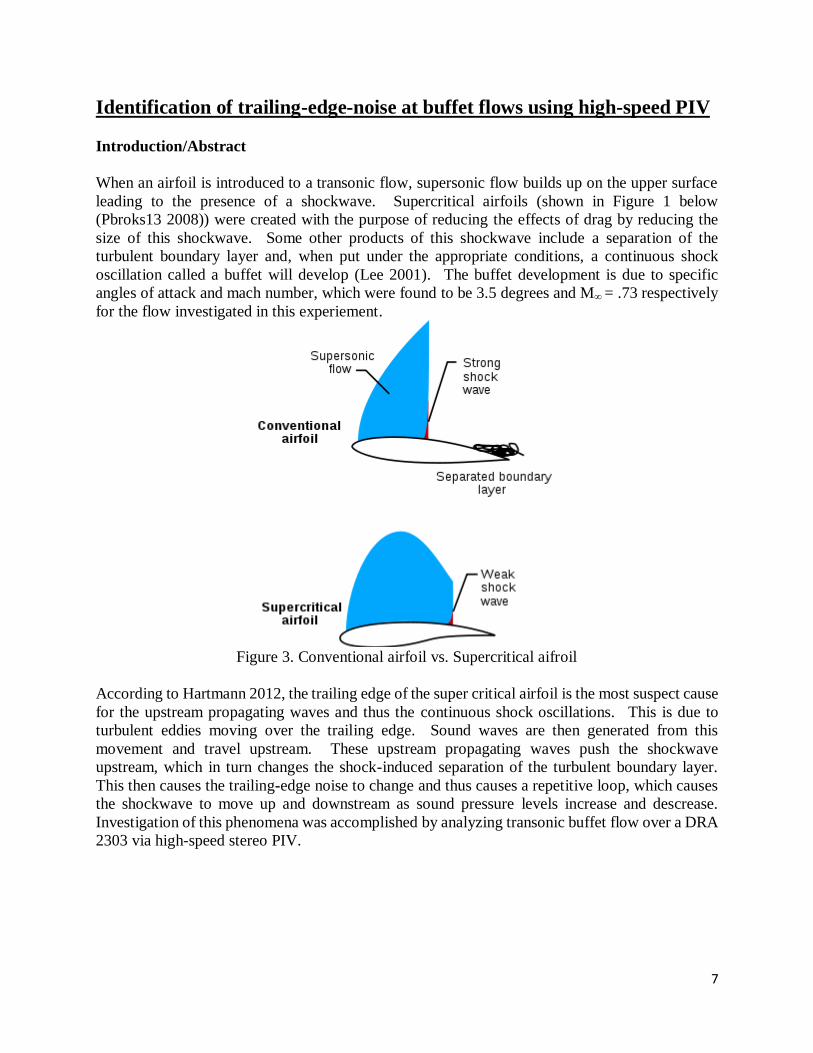
When an airfoil is introduced to a transonic flow, supersonic flow builds up on the upper surface
leading to the presence of a shockwave. Supercritical airfoils (shown in Figure 1 below
(Pbroks13 2008)) were created with the purpose of reducing the effects of drag by reducing the
size of this shockwave. Some other products of this shockwave include a separation of the
turbulent boundary layer and, when put under the appropriate conditions, a continuous shock
oscillation called a buffet will develop (Lee 2001). The buffet development is due to specific
angles of attack and mach number, which were found to be 3.5 degrees and M∞ = .73 respectively
for the flow investigated in this experiement.
Figure 3. Conventional airfoil vs. Supercritical aifroil
According to Hartmann 2012, the trailing edge of the super critical airfoil is the most suspect cause
for the upstream propagating waves and thus the continuous shock oscillations. This is due to
turbulent eddies moving over the trailing edge. Sound waves are then generated from this
movement and travel upstream. These upstream propagating waves push the shockwave
upstream, which in turn changes the shock-induced separation of the turbulent boundary layer.
This then causes the trailing-edge noise to change and thus causes a repetitive loop, which causes
the shockwave to move up and downstream as sound pressure levels increase and descrease.
Investigation of this phenomena was accomplished by analyzing transonic buffet flow over a DRA
2303 via high-speed stereo PIV.
8
Identification of the trailing–edge noise source and upstream propagating waves may be found
upon observation of several periodic patterns including vortical flow structures at the trailing edge.
A phase averaged correlation of the velocity distribution (Hartmann 2012) can aid in identifying
the vortical structures and the distances between them.
√
(1)
Using the two dimensional Q criterion (eqn. 2 below), vortical structures can be observed and their
distinct periodic pattern can be found. Q is the criterion used to identify vortices, as discussed by
Jeong and Hussain 1995, where S is strain and Ω is the rotation tensor.
‖ ‖ ‖ ‖ (2)
It is possible to obtain the frequency of the self sustained shock oscillation using eqn. 3 (Lee 2001)
below,
(
)
(3)
where c represents the chord length, ud and uu are the downstream and upstream propagating
velocities of the pressure fluctuations respectively and xs is the mean shock position. Thus
frequency of the self sustained shock oscillations depend on the speeds of the upstream and
downstream traveling disturbances and the distance from the mean shock location to the trailing
edge. As of today, this approach has neither been verified nor refuted.
Identifying the cause of the buffet flow (and the resulting upstream propagating sound waves) is
important for numerical simulation verification, avoiding resonance frequencies of extremely
flexible and light weight wings required for the future production of more fuel efficient aircrafts.
Therefore the identification of the propagation speeds of the the sound waves is of great interest.
Furthermore, the precise identification of the noise source is essential.
9
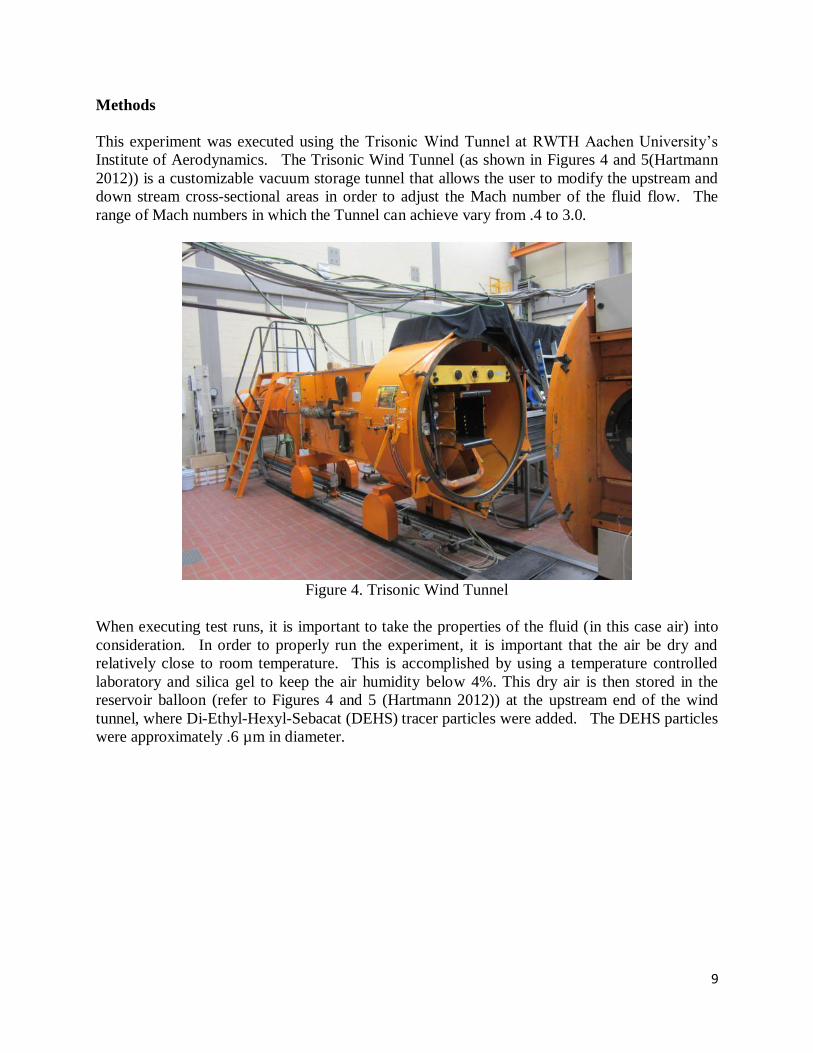
Methods
This experiment was executed using the Trisonic Wind Tunnel at RWTH Aachen University’s
Institute of Aerodynamics. The Trisonic Wind Tunnel (as shown in Figures 4 and 5(Hartmann
2012)) is a customizable vacuum storage tunnel that allows the user to modify the upstream and
down stream cross-sectional areas in order to adjust the Mach number of the fluid flow. The
range of Mach numbers in which the Tunnel can achieve vary from .4 to 3.0.
Figure 4. Trisonic Wind Tunnel
When executing test runs, it is important to take the properties of the fluid (in this case air) into
consideration. In order to properly run the experiment, it is important that the air be dry and
relatively close to room temperature. This is accomplished by using a temperature controlled
laboratory and silica gel to keep the air humidity below 4%. This dry air is then stored in the
reservoir balloon (refer to Figures 4 and 5 (Hartmann 2012)) at the upstream end of the wind
tunnel, where Di-Ethyl-Hexyl-Sebacat (DEHS) tracer particles were added. The DEHS particles
were approximately .6 µm in diameter.
10
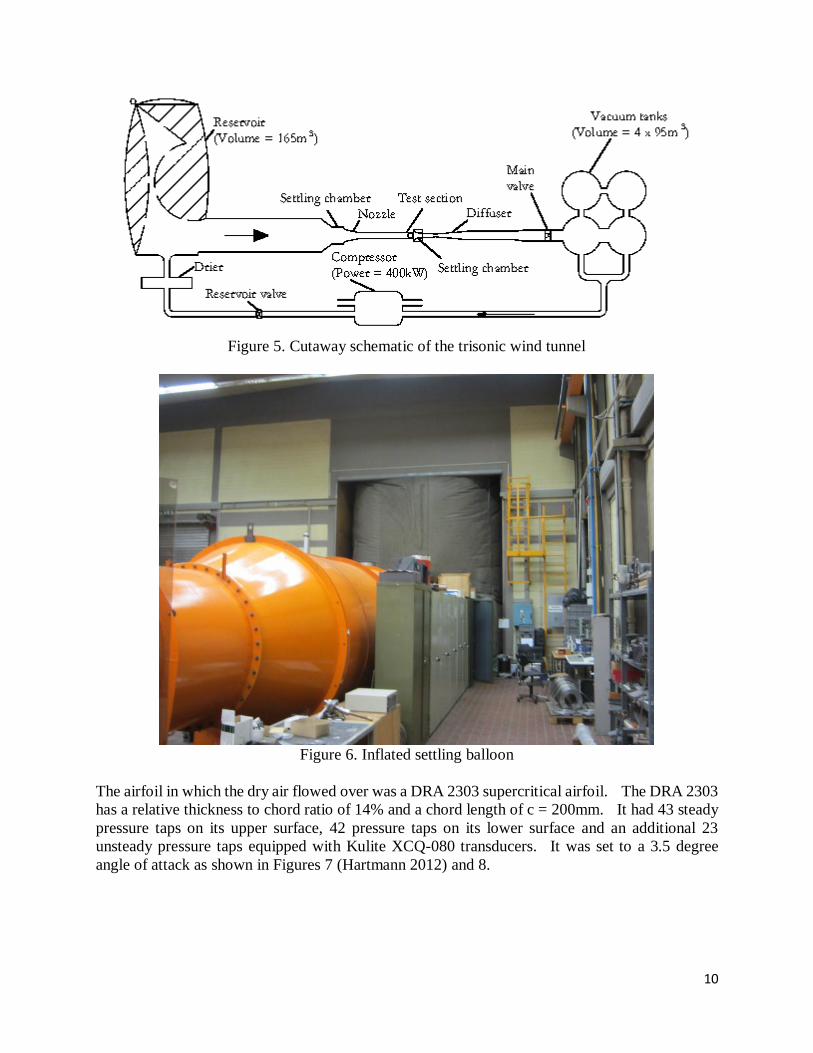
Figure 5. Cutaway schematic of the trisonic wind tunnel
Figure 6. Inflated settling balloon
The airfoil in which the dry air flowed over was a DRA 2303 supercritical airfoil. The DRA 2303
has a relative thickness to chord ratio of 14% and a chord length of c = 200mm. It had 43 steady
pressure taps on its upper surface, 42 pressure taps on its lower surface and an additional 23
unsteady pressure taps equipped with Kulite XCQ-080 transducers. It was set to a 3.5 degree
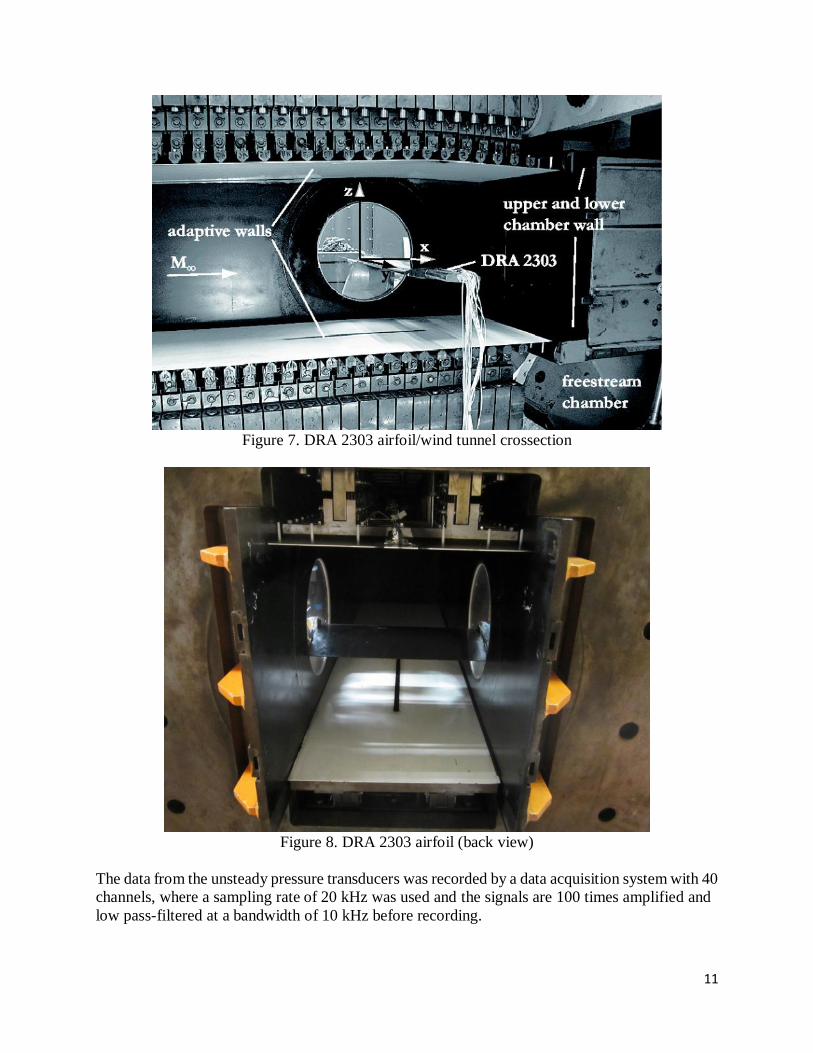
angle of attack as shown in Figures 7 (Hartmann 2012) and 8.
11
Figure 7. DRA 2303 airfoil/wind tunnel crossection
Figure 8. DRA 2303 airfoil (back view)
The data from the unsteady pressure transducers was recorded by a data acquisition system with 40
channels, where a sampling rate of 20 kHz was used and the signals are 100 times amplified and
low pass-filtered at a bandwidth of 10 kHz before recording.
12
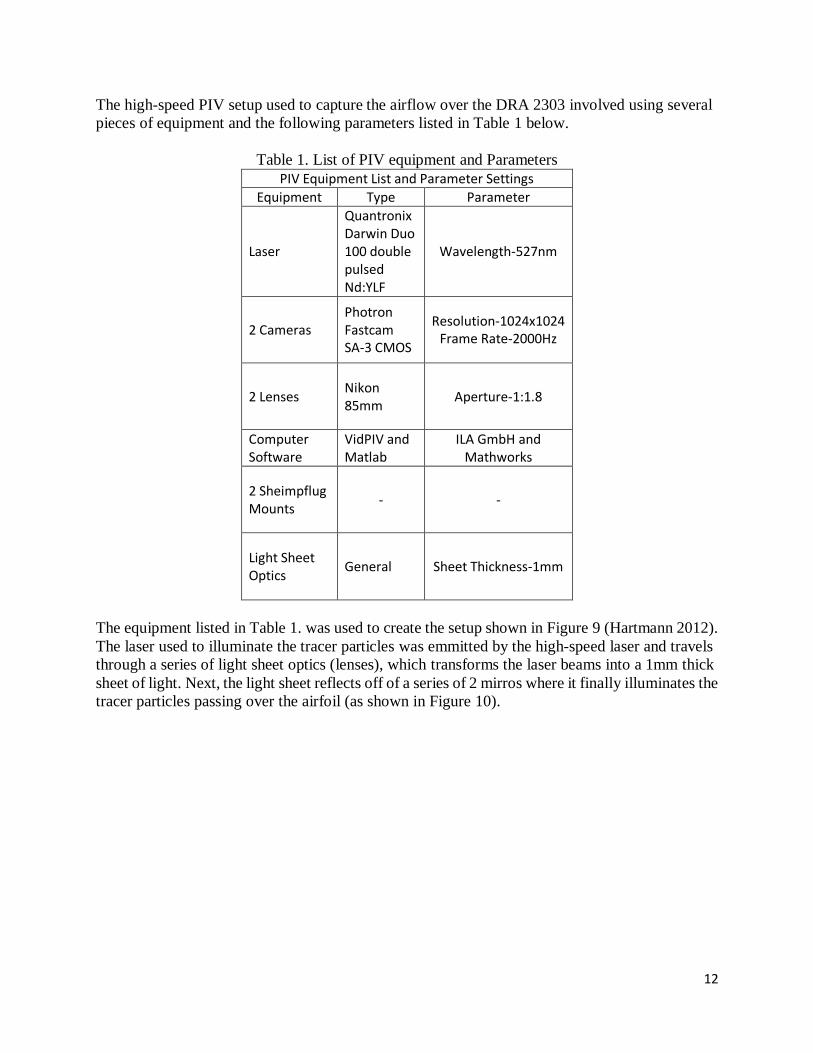
The high-speed PIV setup used to capture the airflow over the DRA 2303 involved using several
pieces of equipment and the following parameters listed in Table 1 below.
Table 1. List of PIV equipment and Parameters
PIV Equipment List and Parameter Settings
Equipment Type Parameter
Laser
Quantronix Darwin Duo 100 double pulsed Nd:YLF
Wavelength-527nm
2 Cameras Photron Fastcam SA-3 CMOS
Resolution-1024x1024 Frame Rate-2000Hz
2 Lenses Nikon 85mm
Aperture-1:1.8
Computer Software
VidPIV and Matlab
ILA GmbH and Mathworks
2 Sheimpflug Mounts
- -
Light Sheet Optics
General Sheet Thickness-1mm
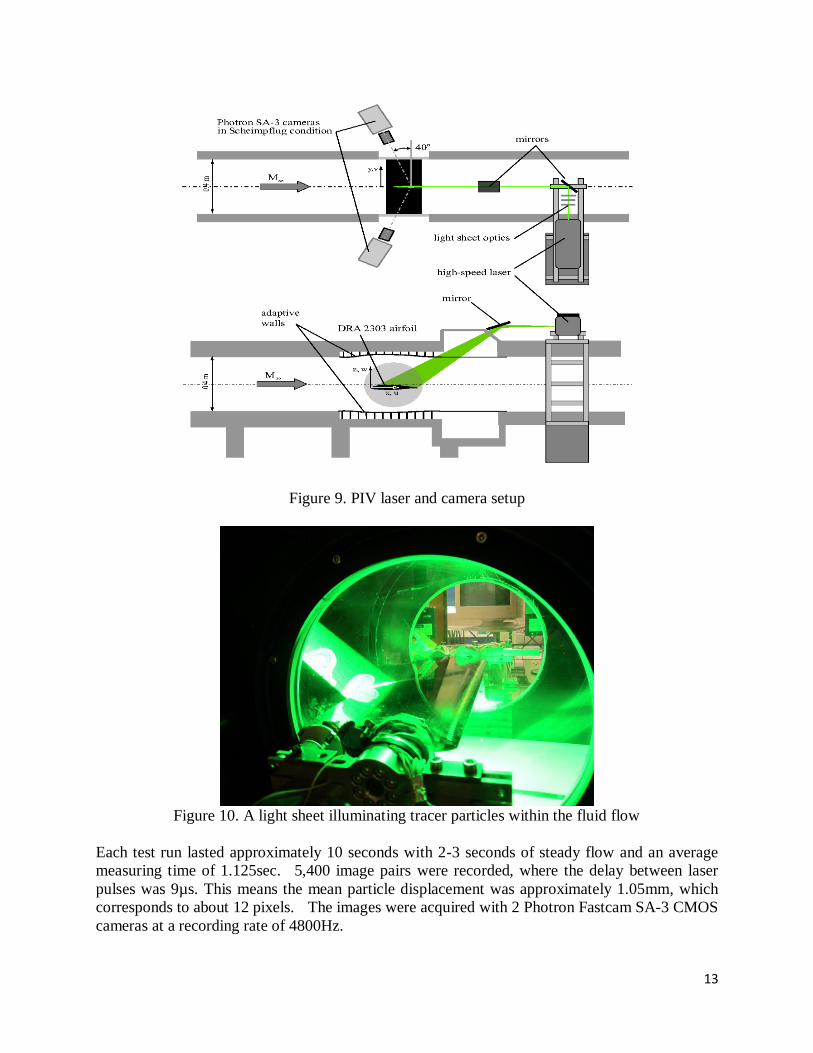
The equipment listed in Table 1. was used to create the setup shown in Figure 9 (Hartmann 2012).
The laser used to illuminate the tracer particles was emmitted by the high-speed laser and travels
through a series of light sheet optics (lenses), which transforms the laser beams into a 1mm thick
sheet of light. Next, the light sheet reflects off of a series of 2 mirros where it finally illuminates the
tracer particles passing over the airfoil (as shown in Figure 10).
13
Figure 9. PIV laser and camera setup
Figure 10. A light sheet illuminating tracer particles within the fluid flow
Each test run lasted approximately 10 seconds with 2-3 seconds of steady flow and an average
measuring time of 1.125sec. 5,400 image pairs were recorded, where the delay between laser
pulses was 9µs. This means the mean particle displacement was approximately 1.05mm, which
corresponds to about 12 pixels. The images were acquired with 2 Photron Fastcam SA-3 CMOS
cameras at a recording rate of 4800Hz.
14
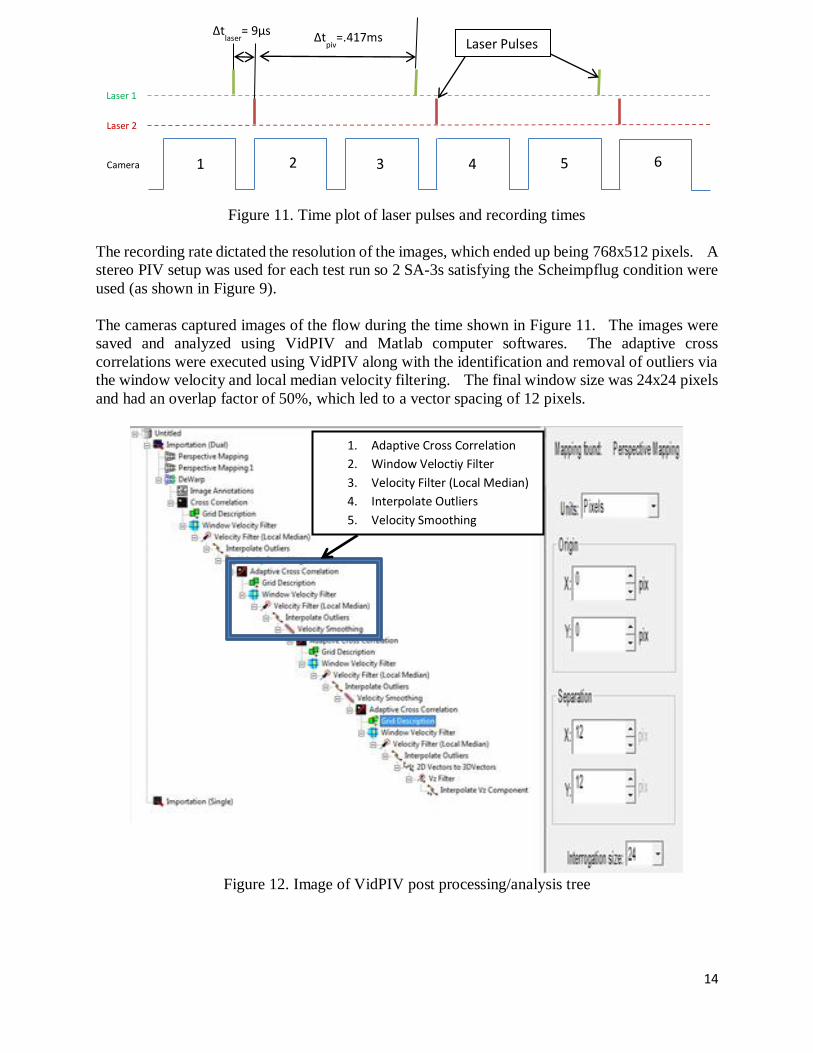
Figure 11. Time plot of laser pulses and recording times
The recording rate dictated the resolution of the images, which ended up being 768x512 pixels. A
stereo PIV setup was used for each test run so 2 SA-3s satisfying the Scheimpflug condition were
used (as shown in Figure 9).
The cameras captured images of the flow during the time shown in Figure 11. The images were
saved and analyzed using VidPIV and Matlab computer softwares. The adaptive cross
correlations were executed using VidPIV along with the identification and removal of outliers via
the window velocity and local median velocity filtering. The final window size was 24x24 pixels
and had an overlap factor of 50%, which led to a vector spacing of 12 pixels.
Figure 12. Image of VidPIV post processing/analysis tree
Camera
Laser 2
Laser 1
1 2 3 4 5 6
∆tlaser
= 9µs ∆tpiv
=.417ms Laser Pulses
1. Adaptive Cross Correlation
2. Window Veloctiy Filter
3. Velocity Filter (Local Median)
4. Interpolate Outliers
5. Velocity Smoothing
15
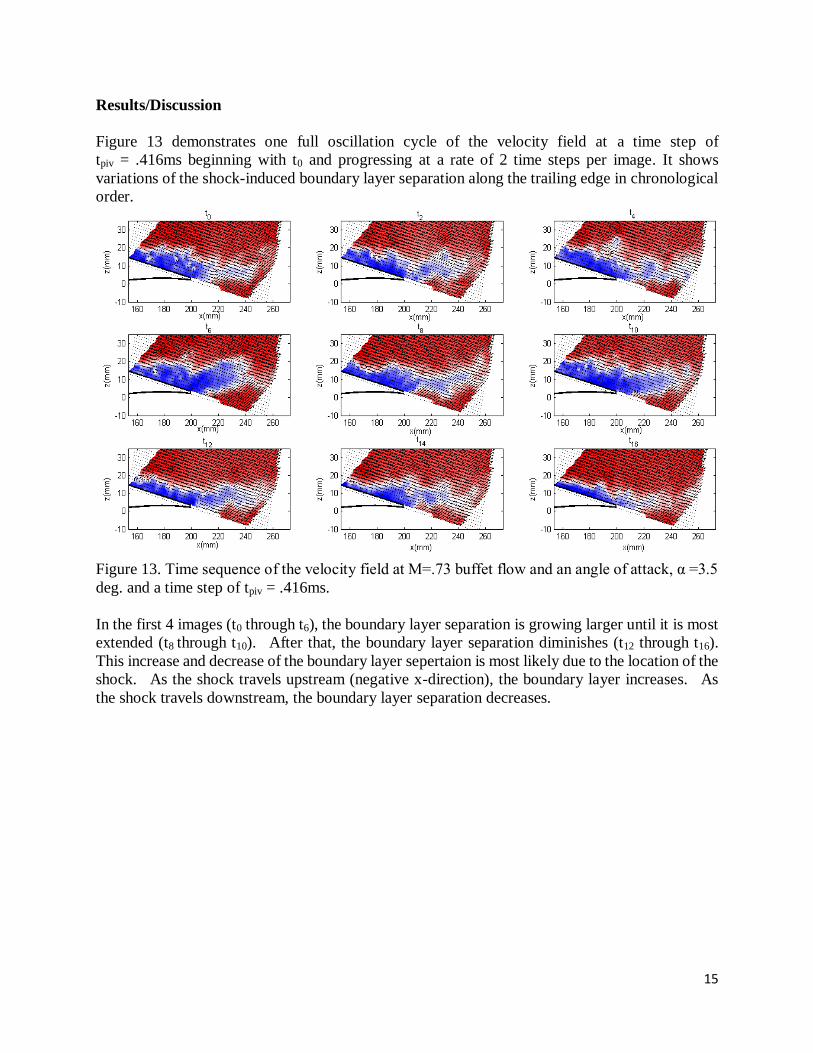
Results/Discussion
Figure 13 demonstrates one full oscillation cycle of the velocity field at a time step of
tpiv = .416ms beginning with t0 and progressing at a rate of 2 time steps per image. It shows
variations of the shock-induced boundary layer separation along the trailing edge in chronological
order.
Figure 13. Time sequence of the velocity field at M=.73 buffet flow and an angle of attack, α =3.5
deg. and a time step of tpiv = .416ms.
In the first 4 images (t0 through t6), the boundary layer separation is growing larger until it is most
extended (t8 through t10). After that, the boundary layer separation diminishes (t12 through t16).
This increase and decrease of the boundary layer sepertaion is most likely due to the location of the
shock. As the shock travels upstream (negative x-direction), the boundary layer increases. As
the shock travels downstream, the boundary layer separation decreases.
16
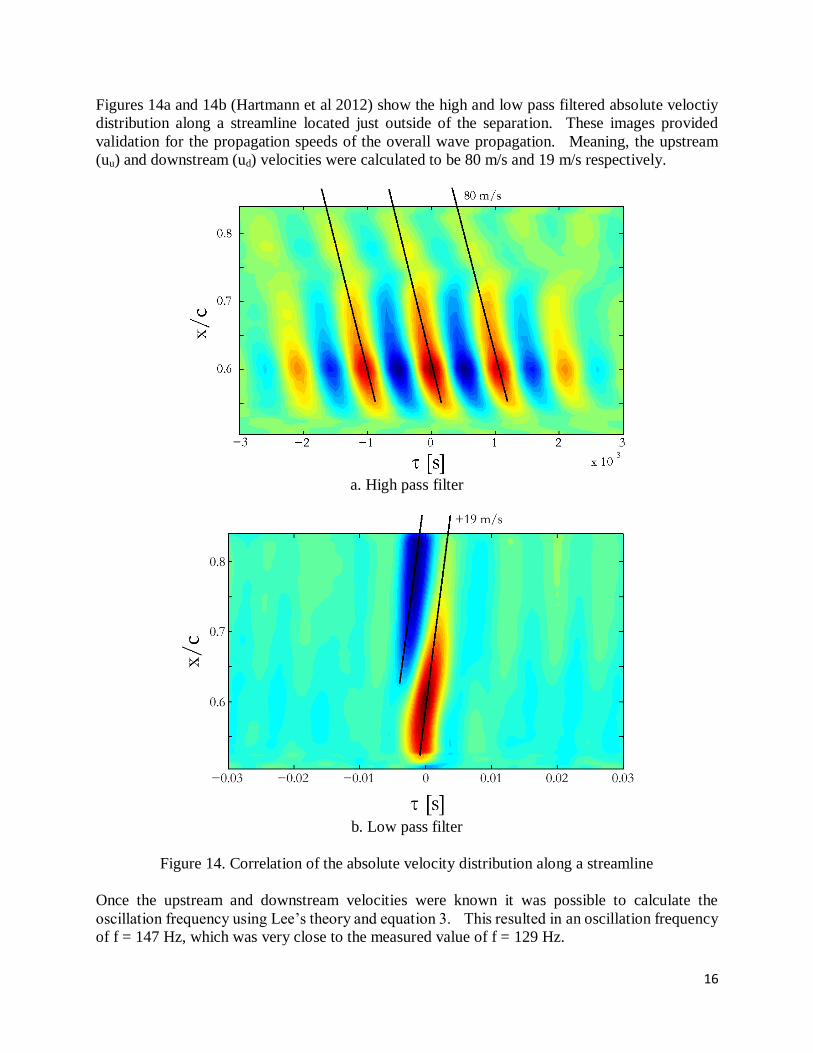
Figures 14a and 14b (Hartmann et al 2012) show the high and low pass filtered absolute veloctiy
distribution along a streamline located just outside of the separation. These images provided
validation for the propagation speeds of the overall wave propagation. Meaning, the upstream
(uu) and downstream (ud) velocities were calculated to be 80 m/s and 19 m/s respectively.
a. High pass filter
b. Low pass filter
Figure 14. Correlation of the absolute velocity distribution along a streamline
Once the upstream and downstream velocities were known it was possible to calculate the
oscillation frequency using Lee’s theory and equation 3. This resulted in an oscillation frequency
of f = 147 Hz, which was very close to the measured value of f = 129 Hz.
17
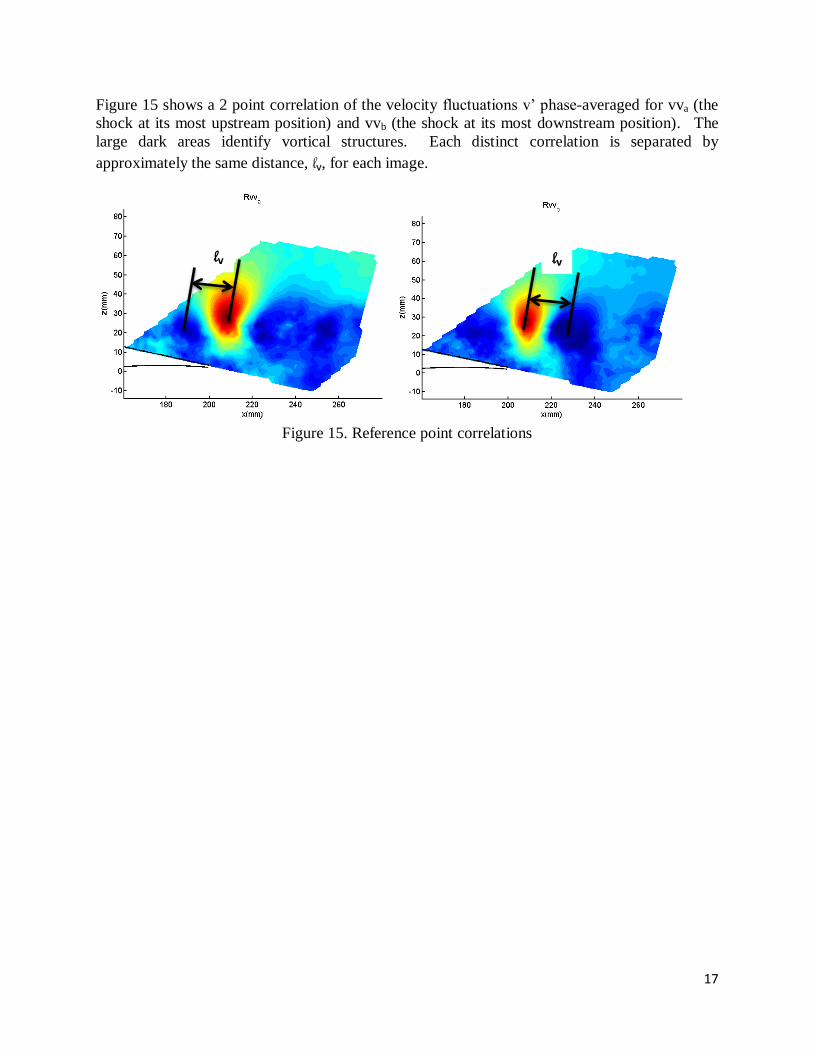
Figure 15 shows a 2 point correlation of the velocity fluctuations v’ phase-averaged for vva (the
shock at its most upstream position) and vvb (the shock at its most downstream position). The
large dark areas identify vortical structures. Each distinct correlation is separated by
approximately the same distance, lv, for each image.
Figure 15. Reference point correlations
lv lv
18
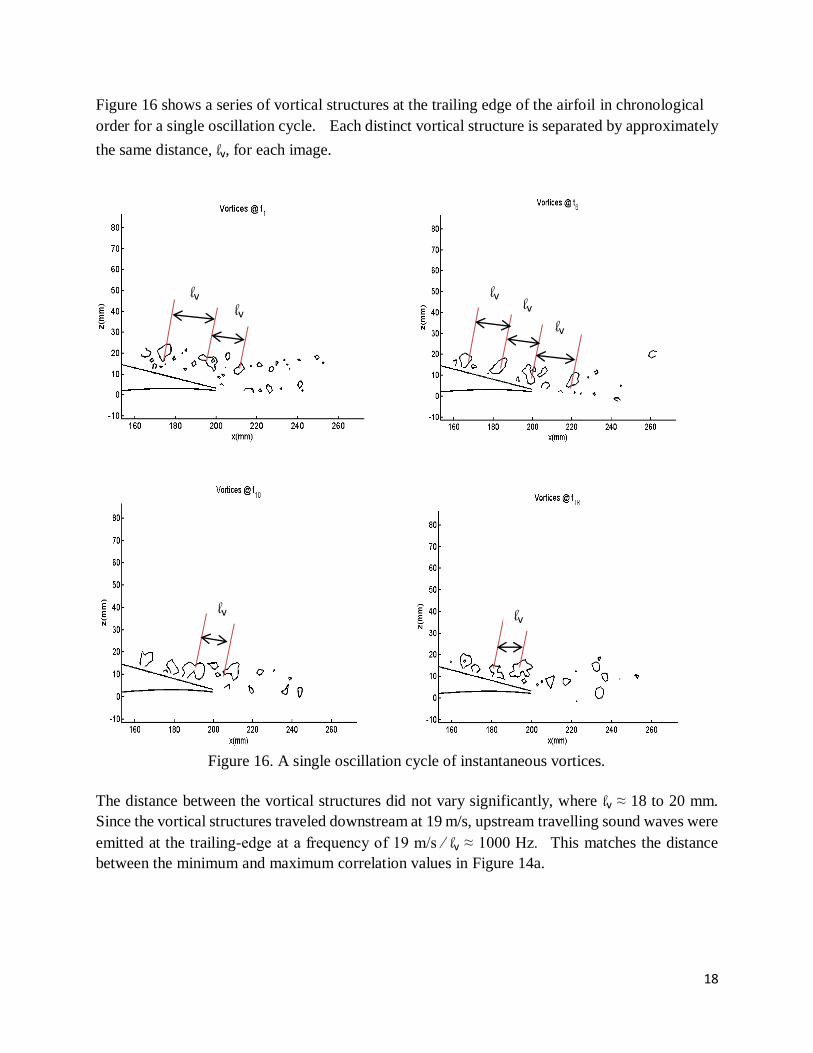
Figure 16 shows a series of vortical structures at the trailing edge of the airfoil in chronological
order for a single oscillation cycle. Each distinct vortical structure is separated by approximately
the same distance, lv, for each image.
Figure 16. A single oscillation cycle of instantaneous vortices.
The distance between the vortical structures did not vary significantly, where lv ≈ 18 to 20 mm.
Since the vortical structures traveled downstream at 19 m/s, upstream travelling sound waves were
emitted at the trailing-edge at a frequency of 19 m/s ∕ lv ≈ 1000 Hz. This matches the distance
between the minimum and maximum correlation values in Figure 14a.
lv lv
lv lv
lv
lv lv
19
Summary and Conclusions
The observation of transonic flow around a DRA 2303 supercritical airfoil issued the investigation
of upstream propagating waves at buffet flow. These observations and analysis of the flow were
possible via high-speed-stereo PIV, VidPIV and Matlab computer softwares. Identifying the
cause of the upstream propagating waves and buffet flow is important for numerical simulation
verification and avoiding resonance frequencies of extremely flexible and light weight wings
required for the future production of more fuel efficient aircrafts.
One supporting observation was obtained from the analysis of the chronological progression of the
boundary layer separation, which unvailed distinct shock location variations. As the shock
traveled upstream, the boundary layer separation increased in size. As the shock traveled
downstream, the boundary layer separation decreased in size. The varying shock location is also
evident when observing the vortical structures. The spacing between them is almost constant,
therefore suggesting noise (sound waves) generated at the trailing edge is the cause of the upstream
propagating waves. The noise level thereby varies with the extension of the separation.
Analysis of the vortical structures and the absolute velocity distribution along a streamline located
just outside of the separation led to the final verification of the upstream propagating waves and
the identification of the trailing edge noise. Since vortical structures traveled downstream at 19
m/s, sound waves were emitted at the trailing-edge at a frequency of 1000 Hz. These values
match the results from Figure 14. Then the sound waves emitted at the trailing edge travelled
upstream, which explains the generation of the upstream waves forming the feedback. Thus the
identification of the trailing-edge-noise and the resulting upstream propagating waves was
accomplished.

20
Acknowledgements
I would like to thank RWTH and the Institute of Aerodynamics for allowing me to take part in this
rewarding experience abroad. I would also like to personally thank Wolfgang Schröder, Axel
Hartmann, Franka Schröder and the rest of the students and staff at the Institute of Aerodynamics
for all their help and generosity.
References
1. Hartmann, Axel. "Experimental Analysis of Wave Propagation at Buffet Flows." Diss.
Rheinisch–Westf¨alischen Technischen Hochschule Aachen, 2012. Print.
2. Hartmann, Axel, Stefan Kallweit, Antje Feldhusen, and Wolfgang Schröder. "Detection of
upstream propagating sound wabes at buffet flow using high-speed PIV.". Aachen: 2012.
Print.
3. Jeong, J. and F. Hussain. On the identification of a vortex. 285. J Fluid Mech, 1995.69-95.
4. Lee, B.H.K. Self-sustained shock oscillations on airfoils at transonic speeds. 37. Progr.
Aerospace Sci., 2001. 147-196. Print.
5. Pbroks13. Airfoils. 2008. Graphic. WikipediaWeb. 27 Jun 2012.
<http://en.wikipedia.org/wiki/File:Airfoils.svg>.
6. Super critical wing. (2002). Retrieved from
<a href="http://encyclopedia2.thefreedictionary.com/Supercritical+airfoil">supercritical
wing</a>